1. Introduction
Today, the world’s population is increasingly growing and is currently reaching around eight billion [
1]. At the same time, the demand for food and agricultural products continues to increase as living standards improve. Meanwhile, the increase in the urban population and the decrease in the rural population have also promoted the development and application of new agricultural machinery due to the labor shortage issues. On the other hand, the agriculture sector faces several challenges, such as increasing energy demand, greenhouse gas emissions, and the effects of global warming [
2]. Therefore, the farm machinery of the future must be completely redesigned. It should be modular with exchangeable equipment integrated into the machine, autonomous, and lightweight. Thus, several small vehicles can operate in the field simultaneously, working continuously, 24 h a day, automatically changing equipment and batteries/refueling when needed [
3].
The development of agricultural robot technology is an inevitable requirement for agriculture to find solutions to the challenges related to the shortage of labor, precision control, farm work convenience, and green operation. Such challenges are difficult to solve with conventional agricultural machinery, which has an important carbon footprint [
4]. As a result of the research efforts, there are several robotic solutions addressing several different areas such as monitoring [
5], mapping [
6], crop and pest managing [
7], environmental control [
8], phenotyping [
9], and planting [
10]. For example, the researcher in [
11] developed an original LiDAR-based high-throughput phenotyping system for cotton plant phenotyping in the field. The Hortibot [
12] is a robotic tool carrier for high-tech plant care. In addition, the ByeLab [
13] mobile vehicle has been developed to monitor and sense the health status of orchards and vineyards. In another application, Vibro Crop Robotti [
14] can also perform field work such as mechanical weeding and precision seeding. Recently, an Ackermann steering control system was developed and tested successfully for a four-wheel-drive agricultural mobile robot in [
15]. Moreover, in [
9,
16] the navigation problems of mapping, localization, and path planning in navigation problems of agriculture wheeled mobile robots were reviewed and the application prospects were discussed. They mentioned that, due to the agricultural environment’s complexity, the available methods still need to be improved in their practicability and effectiveness. In this regard, the research in [
17] used a Robotic Operating System (ROS)-based simulation method to overcome the phenotyping bottleneck in the real farm situations. Recently, advances in agriculture robotics and challenges ahead were reviewed in the comprehensive survey in [
18].
We have mentioned only some examples, but many more projects on mobile agriculture platforms have been started worldwide. However, most of them have been unsuccessful in their mission due to battery limitations and energy shortages. Moreover, regarding the electric powertrain design aspect, a solar-powered unmanned ground vehicle was studied in [
19] for precision agriculture. However, the technical details of the sizing and selection of the components have not been made available in the literature.
The main drawback of conventional agricultural machines is the high consumption of fossil fuels, which has resulted in large emissions of harmful gases. The depletion of fossil fuels and their adverse environmental impact have motivated governments and communities to look for strategies enabling pollution-free renewable energy sources for vehicle applications [
20]. Therefore, tractors with internal combustion engines are neither safe nor healthy, especially in closed working environments such as greenhouses. Based on information from the Environmental Protection Agency (EPA), around 38 percent of greenhouse gas emissions are from the transportation, agriculture, and industry sectors [
21]. In this regard, the use of clean technologies such as powertrain electrification and alternative energy has been proposed as a solution [
22]. The literature shows that some progress has been made in the case of agricultural tractors [
23,
24]. Still, hybridized powertrains for agricultural robots have not received enough attention. Therefore, using new agricultural machinery such as robotic systems and electrified vehicles is essential to achieve lower emissions, higher fuel efficiency, and increased controllability [
25]. On the other hand, the use of robotics in agriculture has contributed to solving some problems. For instance, in closed or semi-closed environments, such as greenhouse and warehouse applications, there are two major issues. First, the fossil fuel combustion in engines releases air pollution, which is harmful to the workers. Second, the working environment could be affected by high engine noise levels. This is why most agricultural robots are powered by an electric propulsion system, bringing many advantages such as improved efficiency, and powertrain design flexibility [
26].
A battery storage system is still one of the most limiting technologies for many electric mobile platforms such as robots [
27]. Some non-road vehicles, such as forklifts and warehouse robots, already have a long history of using electric propulsion systems [
28]. However, the low durability and long recharging time of the current batteries have created limitations in electric vehicles’ autonomy and performance, such as for AMRs in farm applications. These limitations would be more drastic when the vehicles are working in harsh environments such as large farms and greenhouses, which can increase the user cost under multi-shift working conditions during the working season. In addition, the electric AMRs must be charged after a certain operating period. However, in a real situation, a vehicle with nearly empty batteries is unavailable in the working process. Moreover, the failure of a vehicle on a farm while performing a task can result in a catastrophe, and it might cause many problems for farmers. Furthermore, using an electric vehicle with a low battery State of Charge (SOC) might reduce the battery’s lifetime [
29,
30].
In recent years, FCs have gained popularity due to their high-power generation efficiency, non-polluting, fast fueling, acceptable energy density, and low noise. In an FC range extended (FCREx) architecture, the secondary power source (FC) produces electricity to supply power as battery assistance. An FCREx mainly relies on batteries for power and is equipped with an FC system to extend the range of a basic battery-powered system. Regarding various kinds of FC technologies, proton exchange membrane fuel cells (PEMFCs) have higher operating efficiencies up to 70% compared to ICEs with less than 30% [
31]. In addition, the PEMFC has a less cyclic operation, resulting in longer lifetimes and less system control design issues [
32]. In this respect, hybridizing the vehicle’s power supply using the battery and a PEMFC system as a range extender could reduce the size of the FC stack, slowing power transients. Meanwhile, peak power is drawn into the battery system. This could reduce cost and volume in the vehicle design process.
This research focuses on developing optimal solutions for the design of a renewable energy-based (fuel cells + PV) hybrid configuration for an electric mobile robot in agricultural application. The main idea is to design a Fuel Cell Agricultural Mobile Robot (FCAMR) with the basic capabilities of a robotic system with low emission, no charge anxiety, and safe operation. The goal is to extend the autonomy so the vehicle can be operated for an entire day without needing to recharge the electrical system. Compared with the traditional agricultural vehicles, which closely follow the manufacturing process of automobiles, the agricultural robot industry is more complex, and there are not enough standards for these machines. As an outline, the current study discusses the design concerns of a renewable energy-based hybrid electric agricultural mobile robotic concept which is discussed rarely in literature. An FCAMR model developed in MATLAB/Simulink and two Optimization algorithms from Particle Swarm optimization (PSO) and Grey Wolf optimization (GWO) are proposed to simulate and optimize the vehicle. The rest of this paper is organized as follows: The project background, designing process, and modeling for an AMR as a case with an experimental tests procedure are given in
Section 2.
Section 3 describes a sizing design process based on the optimization algorithms and model in the loop process. Results are presented and discussed in
Section 4. Finally, conclusions are drawn in
Section 5.
2. Materials and Methods
2.1. Project Background
In this research, a battery-powered agricultural robot which was designed by our research team at University of Quebec in Trois-Rivieres and considered as a case study for developing a PV/FC/battery hybrid electric mobile robot for agricultural applications. This robot contains two main criteria, including software structure and hardware structure. The software structure contains control strategies, designing and developing path plan algorithms, energy management systems, etc. On the other, the hardware structure contains aspects such as component sizes, and electronic and electrical circuits, which are described in the following sections. The hardware structure of the case study AMR was made by considering the design requirements. Therefore, the differential drive–steering method was used to navigate the robot.
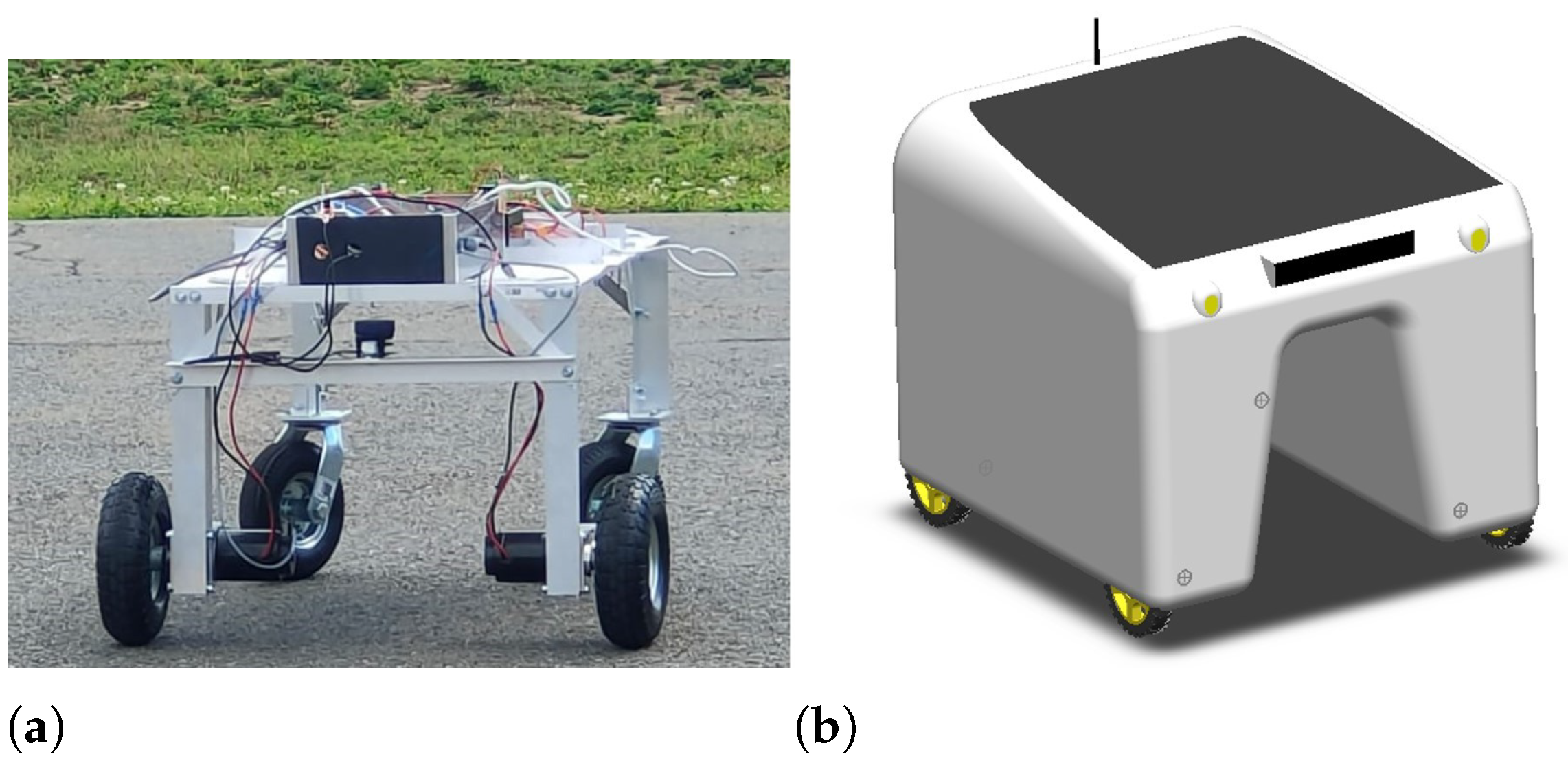
Figure 1 presents the studied AMR. The robot powertrain consists of two electric motors with single-speed gearboxes (16:1 aspect ratio) for each driven wheel. In this context, the regenerative braking system is neglected due to the low-speed application and drive control limitation.
The AMR stored position data in a time series database using sensors such as an Inertial Measurement Unit (IMU), Global Positioning System (GPS), encoders, and Light Detection and Ranging (LIDAR). In addition, an onboard computer (Raspberry Pi) was utilized to compute localization, navigation algorithms, and data acquisition. A remote control system is equipped to manually control the robot at a visual distance. The data acquisition system monitors the wheels’ speed and the battery status by measuring the battery voltage and current drawn from the battery pack.
Table 1 shows the specifications of the AMR’s main electrical and electronic components. The AMR can be operated in manual (remotely controlled) and autonomous modes. A remote-control system is equipped to manually control the robot at a visual distance which is used for primary working cycle measurement in the predefined paths. Moreover, the AMR relies on a Lidar-based algorithm for obstacle detection and to avoid collision with workers and crops [
33].
The primary energy system was designed according to the requirements of the drive system including a 24 Ah lead acid battery pack. The analysis is specially set during June 2022, when the working cycle can begin at 8 a.m. and end at 18 p.m., which would require making at least 8 h of work.
Based on the experimental tests, the vehicle could not make more than three hours at an average speed of m/s under typical working conditions. Choosing a bigger battery would not be reasonable due to the cost, weight, and environmental concerns. Therefore, it decided to hybridize the powertrain system by using more environmentally friendly power sources.
2.2. Proposed Design Process for the PV/FCAMR Architecture
Despite acceptable energy efficiency in basic pure electric AMR, because of the inherent limitations of the battery-powered vehicles, it was faced with a lack of energy in long-time operations due to the limited capacity and fast degradation of the battery. One of the opportunities for solving the problem of autonomy is to incorporate a PV system to collect free energy from the sun while doing farm tasks outside during the day. In addition, using PV panels could protect the AMR because most of the farm tasks are outside under the possibility of harsh environments such as rain, sun, and dust. Moreover, these could increase the energy independence of the robot on faraway farms. Another option is to integrate a modular PEMFC system with a hydrogen tank as an energy source that can be refuelled in less than five minutes [
22] as opposed to a battery with several hours of recharging time. Regarding the architecture of the designed AMR, the FCREx powertrain configuration seems to be more applicable in an FCAMR application because of its flexibility and simplicity. Similar to the series hybrid electric architecture, the FCREx is a battery dominant system which uses a FC as an alternative for the internal combustion engine. Indeed, this architecture allows a secondary power source (FC) to operate at its optimal region, belong its more flexible location option for the designer [
34]. For previous reasons, a plug-in PV/FC hybrid-electric configuration is considered a suitable powertrain for the AMR application because it can connect to the electric grid and might be charged from external electric power sources such as stationary solar power plants as well. This system has three energy sources: a battery pack, an onboard PV system, and a hydrogen tank with FC. A simplified powertrain for the proposed plug-in hybrid PV/FC-AMR is presented in
Figure 2.
In fact, the design and development of non-road agricultural hybrid electric vehicles is a complex process; nevertheless, there is no standard methodology. Therefore, a general design process of the hybrid PV/FCAMR is proposed in this paper. In this regard, the following steps are considered. First, define typical farm working cycles based on customer needs. Next, modeling an AMR for component sizing and EMS evaluation before construction. Then, designing and developing a PV/FC range extender system. After that, designing and developing a heuristic EMS. Finally, components integration and evaluation of the hybrid electric FCAMR. In the following sections, the design process is discussed in detail.
2.3. Working Cycle Design and Extraction
Concerning performance assessment, conventional vehicles are usually tested in specific conditions using different dynamometers. Several standard driving cycles are used in the automotive development [
34]. For non-road vehicles, if standardized tests exist, they are still unrepresentative of all real-world applications, since every application is inherently different. Based on the author’s knowledge, there is no standard working cycle for agricultural robots. Therefore, one of the main challenges of the AMR simulation is the lack of standardized drive cycles, which makes comparing results from different studies difficult.
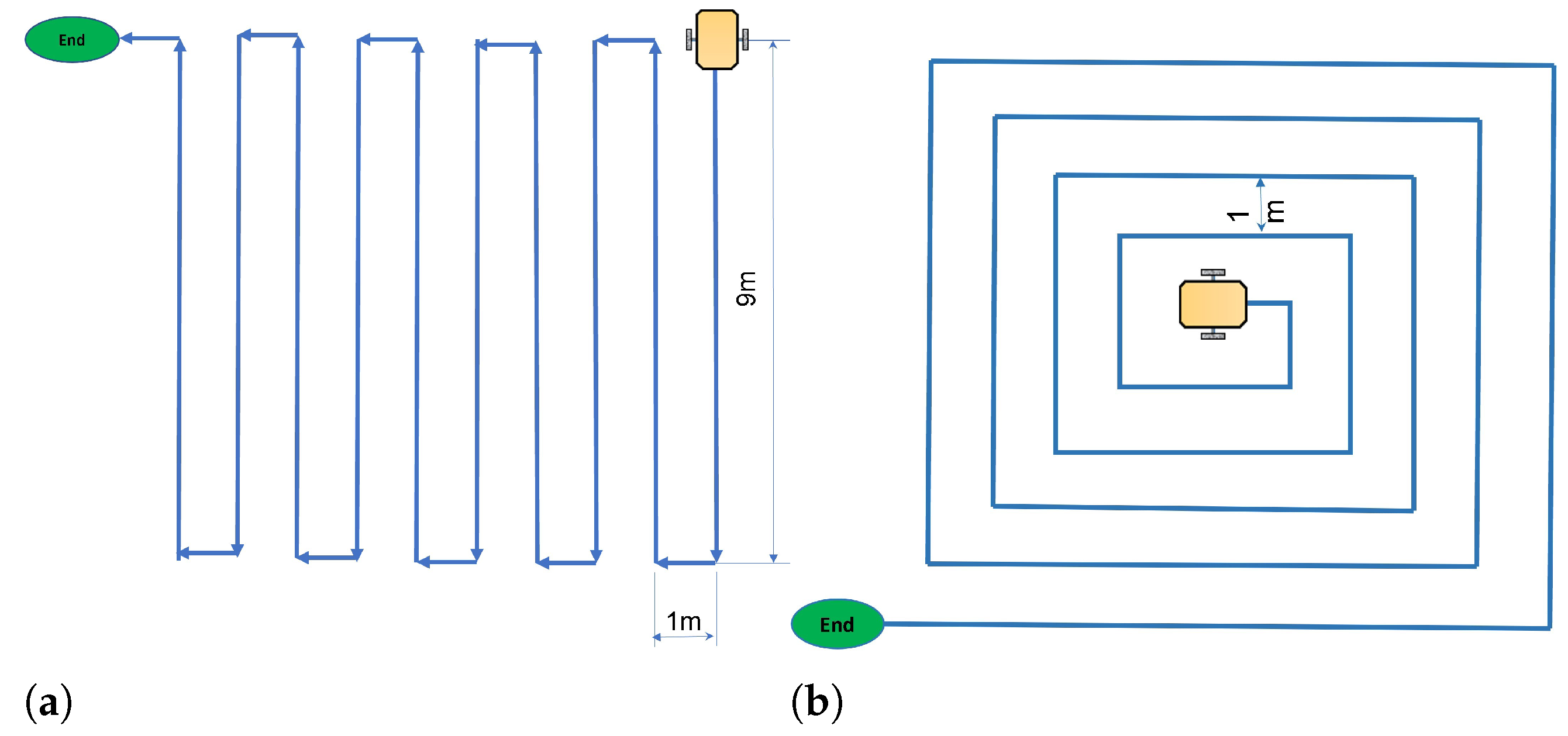
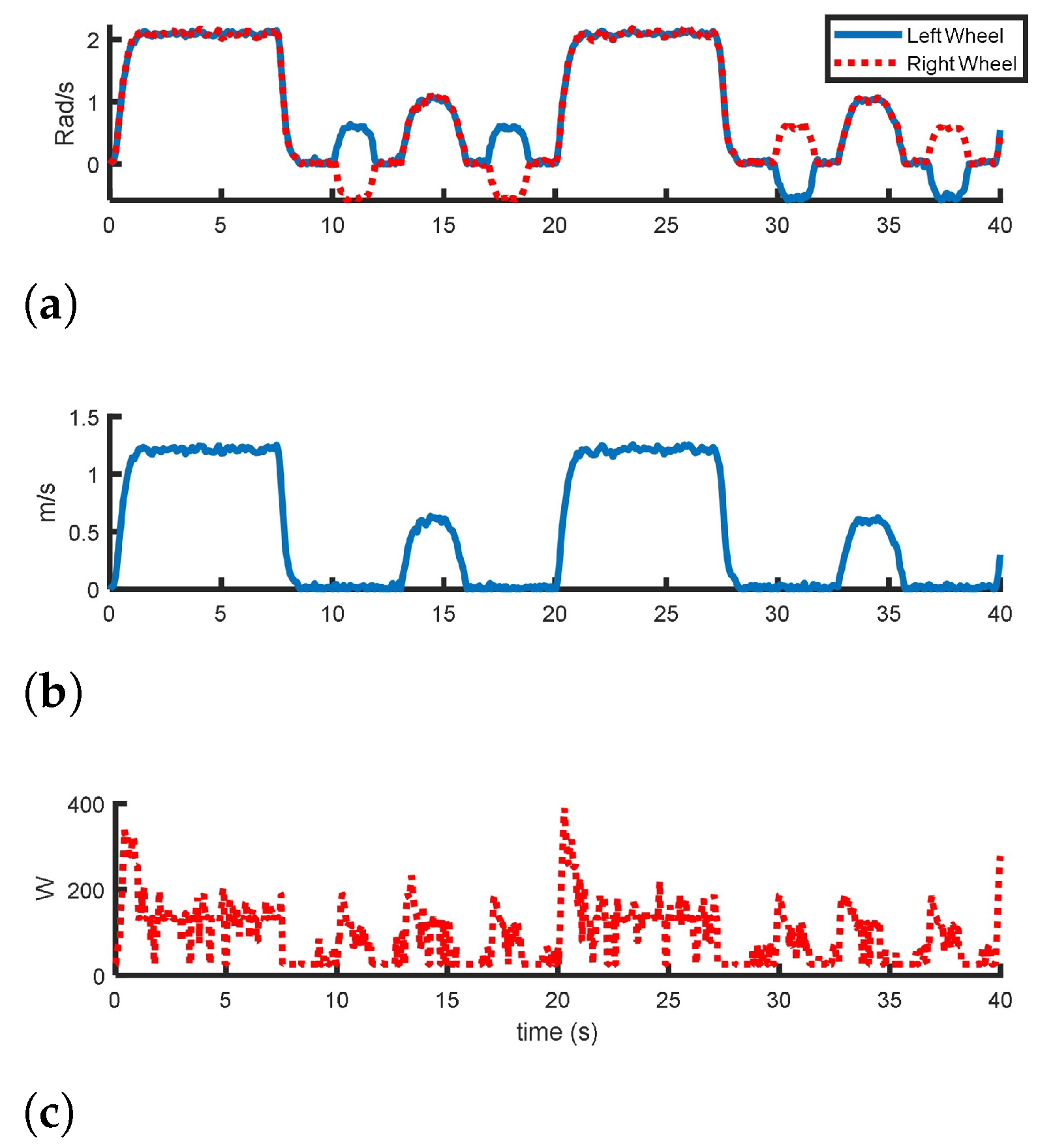
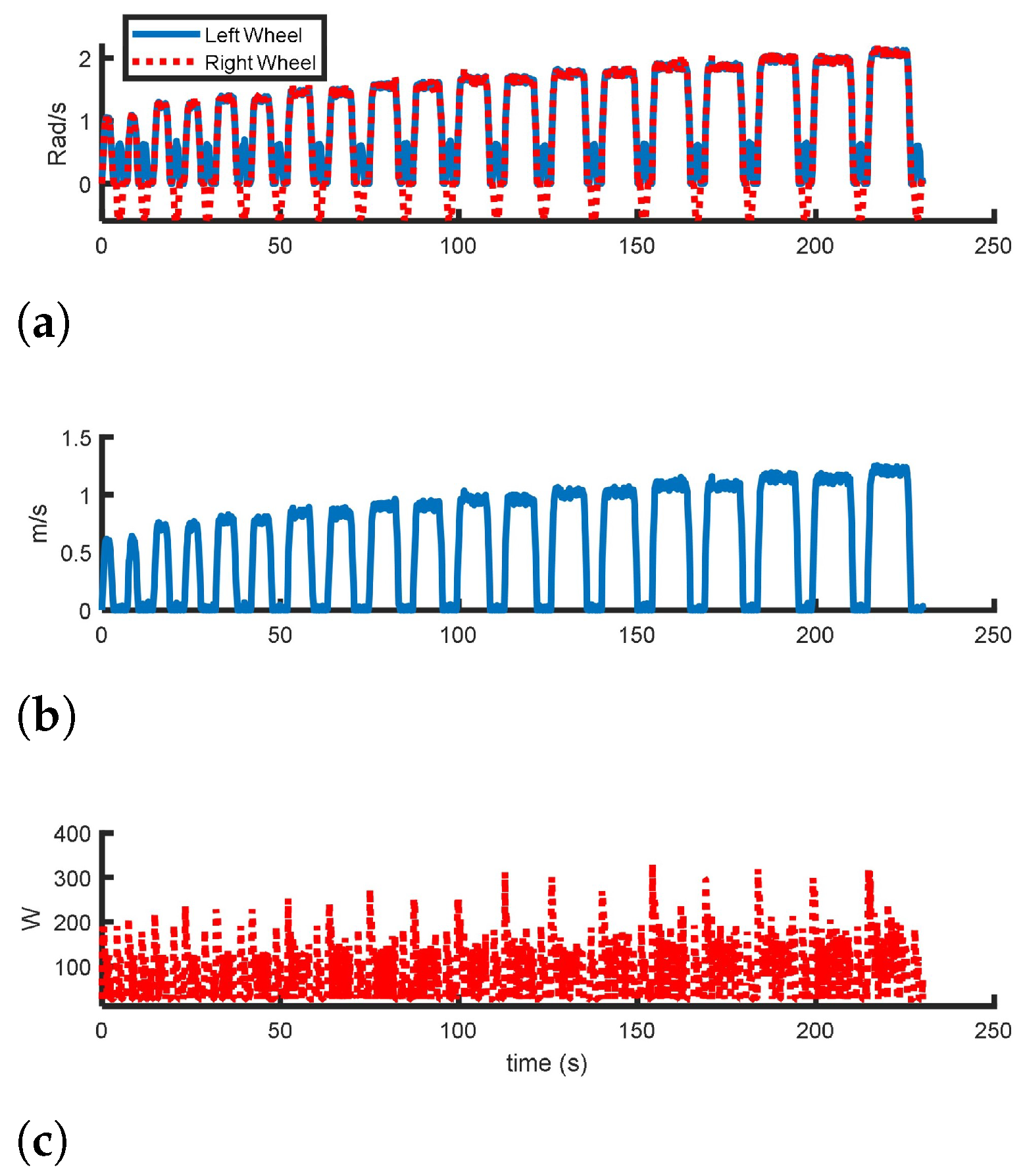
As highlighted above, the lack of standardized working cycles often leads to researchers developing their own cycles to suit their particular needs. In this regard, some typical working cycles need to be designed and conducted to powertrain designing and evaluating the hybrid electric AMR. Based on the typical characteristics of non-road vehicles such as AMRs, the driving cycle measurement has been considered the starting point. Subsequently, the basic AMR is moved using different velocities similar to typical real working cycles to measure the actual power requirement and energy consumption. In real farms, an AMR is usually employed in stop-and-go-loop working conditions. Therefore, we propose two typical pathways by considering the mixture of transitional and rotational movement patterns. They include row linear and perimeter circular movement patterns as shown in
Figure 3. Each motion pattern was simulated for a 100 m distance and repeated three times in the same condition, considering a flat asphalt surface to minimize unexpected situations.
In addition, each test includes four sections, acceleration from stationary, constant velocities, and deceleration to stationary, then turning 90 degrees left or right. In this respect, the battery voltage and current, motor power, and velocity of the wheels are recorded by the developed data logger with a 0.1 s sample rate. The speed profile and the traction power required for completing the working cycles could be employed by a dynamic model in the designing process, such as estimating energy requirements, tuning energy management strategies, and component sizing.
2.4. The FCAMR Powertrain Modeling
As mentioned before, designing a hybrid electric AMR is a complex process and is usually constrained by time and budget. Therefore, model-based design is usually used as an engineer aid tool to simulate vehicles in a computer before construction. Some software such as ADVISOR [
35], and Autonomie [
36] are used in literature to simulate hybrid electric vehicle powertrain. However, they are not applicable directly in non-road vehicles and robots’ powertrain simulation due to specific powertrain architectures and features. In one of the authors’ previous works of the authors [
23], a differential drive mobile robot powertrain model is presented and evaluated. Those details will not be repeated in this paper. Consequently, that model was modified for the energetic analysis of an FCAMR in this work. In this regard, a realistic MATLAB Simulink model is developed to simulate the hybrid FCAMR. Some fundamental aspects that are necessary to develop the PV/FCAMR powertrain are mentioned in the following sections.
Figure 4a shows the free body diagram of the forces that interact with the AMR which will be described more in the next section.
Figure 4b shows a schematic view of a differential drive AMR with two drive wheels and two castors that have been added for the vehicle balance. Each drive wheel could be rotated independently fore-and-aft. Subsequently, the robot’s trajectory can be determined by changing the drive wheels’ revolution.
2.4.1. Powertrain Model Evaluation
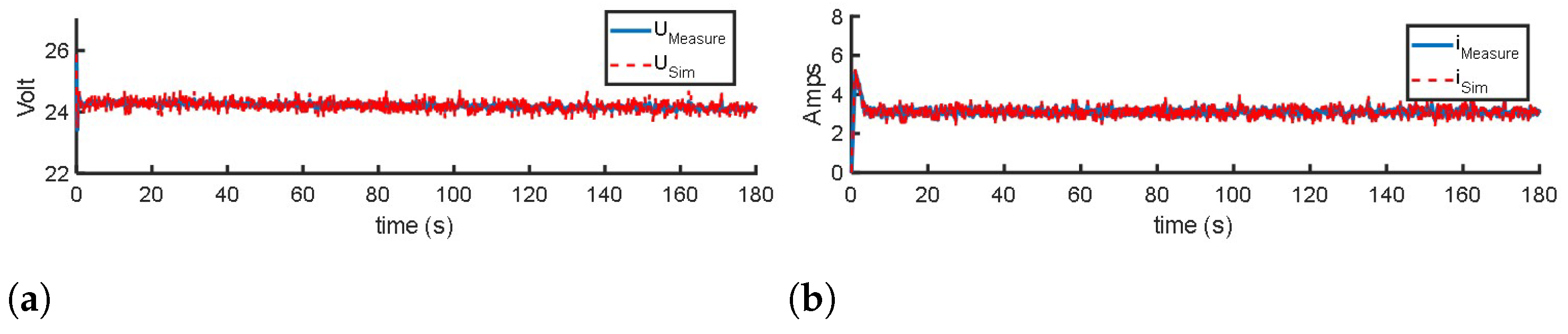
To evaluate the developed model, a comparative study in the first step is performed between the simulation results and the extracted experimental data by the basic battery-powered AMR. Therefore, the AMR is tested without a load while the wheels are off the ground to achieve full speed (
m/s). This test has been conducted in order to eliminate surface effects on the performance of the AMR to assess model accuracy. Hence, the experimental data and simulation results for the vehicle when the environmental resistance and the vehicle weight are removed from the wheels are shown in
Figure 5.
Figure 5a compares the DC-bus instantaneous voltage from the real-world test and the simulation, and
Figure 5b compares the consumed current by the motors. These results confirm an exact synergy (with an accuracy of 95%) between the energy model and the real battery-powered AMR performance.
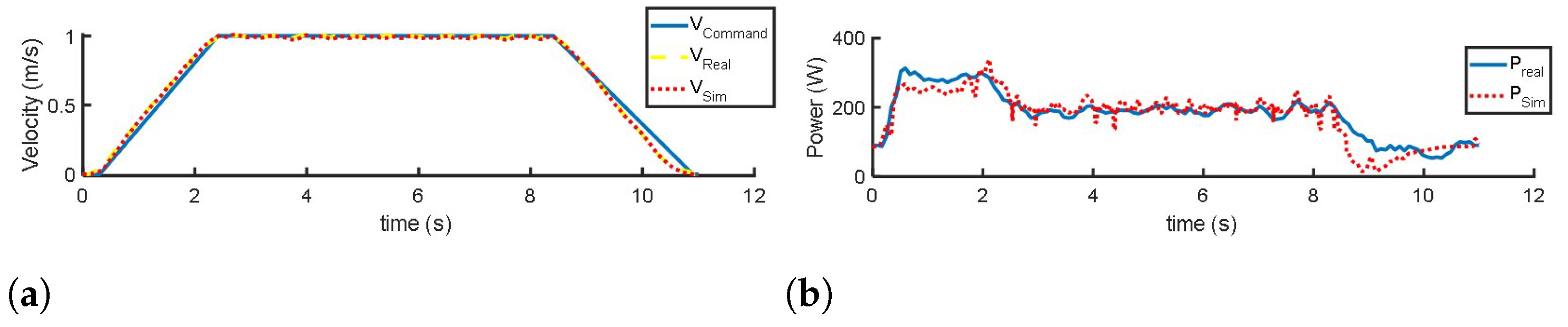
The actual power requirement and energy consumption using a trapezoid speed profile are compared with the result from the AMR Simulink model. In this regard, the maximum linear velocity in the trapezoidal speed profile scenario was considered as 1 m/s (
Figure 6a). Similarly, the acceleration time from rest to maximum speed and vice versa was adjusted to two seconds to prevent high mechanical and electrical stresses.
Figure 6b shows an adequate match between the measured power requirement based on the speed profile as a reference for the Simulink model and the obtained power requirement from the simulation. These results showed that the Simulink model has enough accuracy for energy estimation purposes for the rest steps of the hybrid AMR powertrain designing process.
2.4.2. Energy Requirements of Traction System
An AMR operates at a low speed in the field and mainly overcomes some forces such as rolling resistance, slope resistance, and acceleration resistance. The AMR also needs to overcome load resistance for agricultural tasks which distinguishes them from conventional vehicles. Thus, the total energy consumption (
) connected to the AMR motion could be formulated as the following equation:
where
, and
denote the energy needed to overcome the kinetic resistance forces, and energy losses by other accessories, such as sensors plus the actuators’ energy consumption, respectively. To obtain the required energy to drive the AMR during the given working cycle, it is necessary to consider vehicle dynamic behavior by calculating the opposite forces
such as rolling
, aerodynamic resistance
, and slope resistance
that prevent the movement.
could be calculated using Equation (
2) [
23].
where
is the rolling resistance coefficient;
g is the gravity acceleration;
,
,
A, and
are the air density, drag coefficient, frontal area, and wind velocity, respectively.
is the road or field slope. Rolling resistance can be modeled as a coefficient of friction which is reported in the range of coefficients expected on a farm [
37].
Table 2 lists the main parameters that have been considered for modeling.
2.4.3. Initial Parameters of Energy Storage Subsystem
The total instant traction power required by the AMR is estimated to determine the batteries’ size. Then, the energy consumption was calculated to assess the characteristics of the energy storage system (
) using the measured working cycles and the Simulink model. An initial calculation can be performed by the following formula:
where
is energy consumption,
, and
denote the battery’s final and initial state of charge during the cycle, respectively. Based on the SOC curve, a
of 30%, and
equal to 100% are considered, which are representative values to prevent fast battery degradation. Consequently, battery pack capacity (
) could be estimated as:
where
,
, and
F represent the nominal voltage, efficiency, and charge factor of the battery. The battery’s efficiency is considered equal to 85% [
38], and the charge factor guarantees to obtain the battery capacity at 1C is equal to 1.5. The SOC estimation of the battery is a fundamental parameter in electric vehicles. The physical model of the battery estimates the SOC using the Coulomb counting technique, which is a preferred way in EVs simulations. The technique consists of calculating the battery SOC (
) by measuring the current of the battery (
) and integrating it over time by the following expression [
39,
40]:
2.4.4. Fuel Cell as a Range Extender
The FC is considered a voltage source based on its static polarization curve. In addition, the hydrogen flow rate is estimated based on experimental data by a linear function fitting, where
a and
b signify fitting parameters [
41].
Consequently, the
cost can be calculated considering the total fuel consumption:
To take into account the added onboard energy source, the
of the
tank (
) is calculated by the following equation:
Then,
is the initial mass of
(
g),
is the
mass flow (
) and
is the FC current. A 300 W PEMFC parameters (FCS-C300 from Horizon Fuel Cell Technologies, Singapore) is considered as a base [
42]. In addition, the FC system is composed of a DC-DC converter, a boost chopper, and a smoothing inductor for its current control. Their energetic performances are included in the FC static characteristics.
2.4.5. Photovoltaic System as an Energy Assistance
The PV system is considered a voltage source. In this regard, the onboard PV system with approximately 0.5 m
(available surface on top of the FCAMR) acts as an energy assistant, shade, and protector. A 50 W peak power (Wp) could be generated using a monocrystalline panel [
43]. The average amount of hourly available PV power in Trois-Rivieres, QC, Canada (latitude 46°20
49.7″ N, longitude 72°34
37.7″ W) is applied as the PV system model. This information can be obtained from the National Renewable Energy Laboratory website [
43]. In eastern Canada, agricultural operations are usually performed from April to September. Therefore, the average hourly solar power in this period, is applied to the model as a lookup table. It should be noted that the FCAMR system has other components, such as sensors, microcontrollers, and other onboard electronic components, which are accessory parts. These components are extremely efficient nowadays but still consume a portion of the battery’s current. These components are modeled based on the data provided by the manufacturers in lookup table blocks. Subsequently, the current loss due to the electronic components is signified as
. Kirchhoff’s current law is used to model the parallel connection among the battery pack, traction motors (
), FC (
) system, PV system (
), and
as follows:
Once the mathematical model was developed, the final dynamic model for the vehicle and the respective simulations were obtained using MATLAB Simulink. Each model part was provided based on the manufacturer’s datasheets and experimental test results. The model allowed a comprehensive parametric study of sizing and performance evaluation of the hybrid powertrain to be analyzed. Consequently, the size of the electric motor, batteries, and FC system could be established based on the vehicle’s energy requirements by using rule-based and optimization-based methods. Moreover, the range-extender capacity (required power and fuel tank capacity) can be sized by considering the available energy of the onboard battery.
3. Component Sizing and Design Optimization
As mentioned above, the component selection and prototyping of a hybrid powertrain system for an AMR are problematic because of various design choices and constraints. Generally, an FCREx is a battery electric vehicle with an FC range extender. In the FCRExs architecture, the electric machine is usually sized to comply with vehicle performance requirements. The FC system power meets the requested continuous loads. Typically, the battery pack can support a road with a 15% grade for a specific speed and is sized to drive 50% of the daily driving range. The hydrogen storage is sized to extend the expected range [
44]. However, in optimal component sizing, vehicle performance requirements and constraints must be satisfied at the same time. Literature consideration shows that a variety of optimization algorithms are available for HEV design [
34]. A detailed review of component sizing methods can be found in [
45]. One choice for component sizing of HEVs is the application of nature-inspired optimization techniques, such as evolutionary and swarm algorithms [
46]. It has been demonstrated that those techniques are capable of finding the global optimum solutions, even if the solution domain is a large scale, highly nonlinear, constrained and complex [
47]. For instance, a Genetic Algorithm (GA) was applied to the component sizing optimization of a fuel-cell-powered PHEV in [
48]. In addition, an integrated Particle Swarm optimization (PSO) was used for the optimal powertrain component design of an FC locomotive application in [
49]. The PSO is relevant considering its few optimization parameters, good accuracy, and short computation time compared to other optimization approaches. Its disadvantage is the selection of constant values for updating velocity. If inappropriate constants are chosen, then the problem may not converge to the optimum [
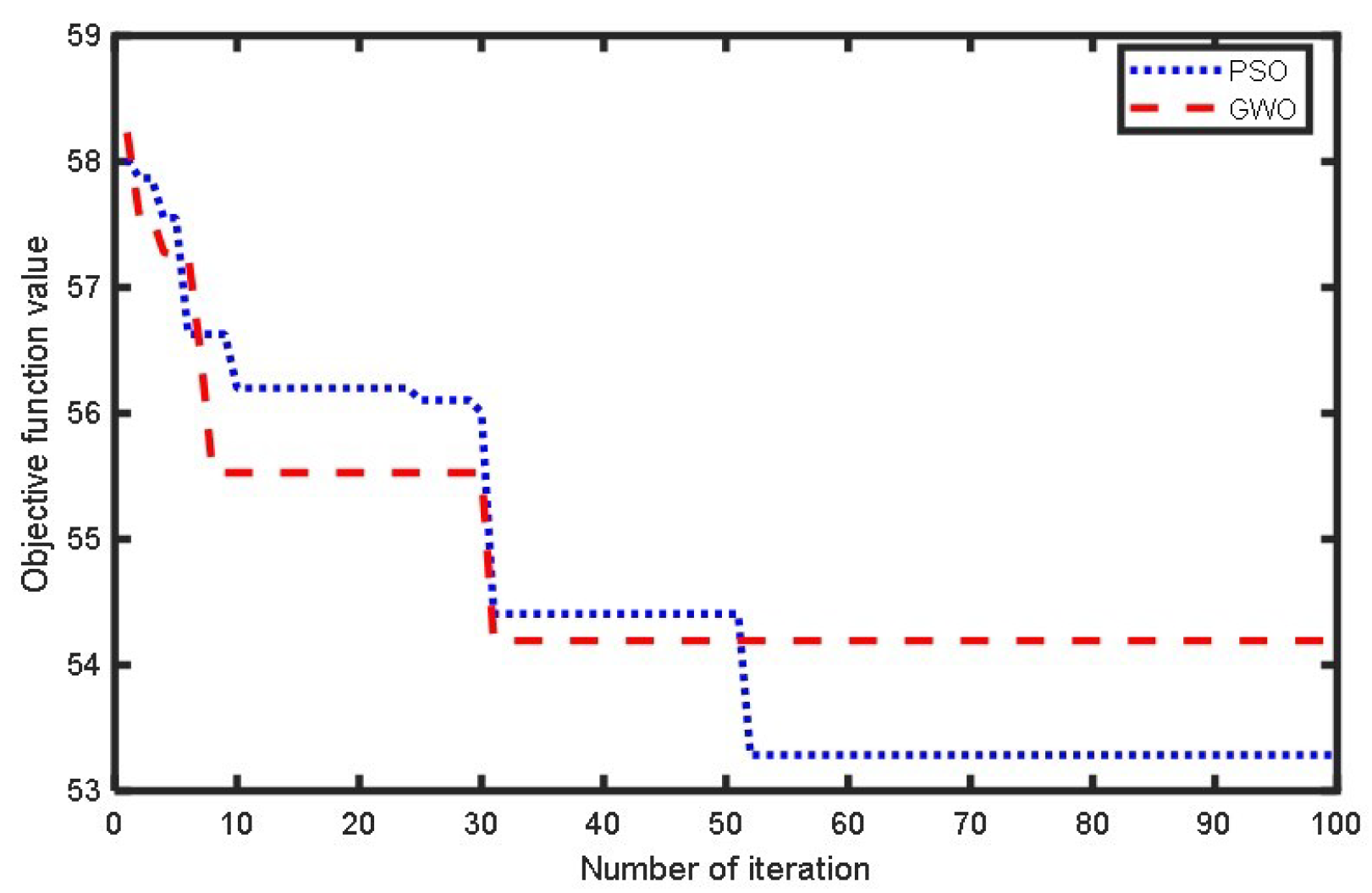
45]. However, there are other meta-heuristic based optimization methods such as Grey Wolf optimization (GWO) that was introduced recently and applied to the optimization in different fields. Therefore, the PSO is employed alongside of GWO to optimize the design parameters of the initial rule-based method. Consequently, the effects of the powertrain system and working cycle on component sizes are analyzed and compared. A brief description of both algorithms’ processes is given in the following sections.
3.1. Particle Swarm Optimization (PSO)
The idea of PSO came from the swarm intelligence found in many natural systems with group behavior. Ant colonies, bird flocks, and animal herds are a few examples of such natural systems. By considering an optimization function for the problem, PSO attempts to capture the global maximum or minimum value. More details about the optimization function and constraints are described in
Section 3.3. The PSO algorithm follows some steps to solve an optimization problem. Firstly, the algorithm allocates initial random velocities and positions to all particles in space, the best particle of the particular (
), and the best particle of the swarm (
) to upgrade the position of each particle in turn [
50]. The procedure is written as the following equations:
where
and
are the cognitive and the social parameters which are considered 0.5 and 2.0, respectively.
and
are random numbers between 0 and 1.
is the inertial weight equal to 0.8. Equation (
10) gives the new velocity of the
particle. Equation (
11) determines the new position of the
particle at each iteration. Particles are iteratively updated using these equations until an optimal solution is found or the number of iterations is reached. The number of iterations is set to 100, and the population set to 25.
3.2. Grey Wolf Optimization (GWO)
The Grey Wolf Optimizer is a metaheuristic algorithm originally developed by [
51]. The GWO optimization method recreates the hunting behavior and leadership hierarchies of grey wolves. Based on the GWO algorithm, grey wolves live in packs at four levels of the hierarchy in nature. At the first level, there is a leader named alpha (
); at the second level, there is the group beta (
); at the third level, the group delta (
); and the lowest-ranked group is omega (
). The grey wolves are characterized by a special group hunting technique including three principal phases including [
52];
Observe, race, and approach prey;
Chasing, turning and provoking the prey until it stops;
Attack on prey.
The hunting behavior of the grey wolves is modeled by a set of mathematical equations that can be implemented in numerical software tools. In the optimization algorithm, the prey is considered the optimal solution, and the wolves are considered the fittest solution. The wolves
and
represent the second and the third-best solutions, respectively, and the rest of the solutions are considered as the wolves
that follow the other wolves during the hunt based on the optimization function and constraints (see
Section 3.3). The mathematical model of the encircling phase is given as:
Then, k denotes the current iteration, is the vector representing the distance between the prey and the wolf, and are coefficient vectors, is the prey position vector and indicates a grey wolf position vector. The exploration is guaranteed by A with random values proving the condition that assists the search agent to deviate from its prey. The exploitation (attack on the prey) starts when the condition is confirmed. This condition guarantees that the next agent position could be in a random location between the prey and its current position.
3.3. Model-in-the-Loop Optimization Process and Problem Definition
The approach for HEV design optimization is typically a model-in-the-loop design optimization process, as shown in
Figure 7. The performance and design objectives, such as overall powertrain cost and fuel economy, can be evaluated using the vehicle model and computer simulation tools to design a hybrid powertrain for the AMR. Accordingly, using the design variables’ initial values, the vehicle model is simulated to obtain the numerical values of the objective function in the first step. At the same time, the constraint functions should be evaluated. These simulated results are then fed back into the optimization algorithm to produce a new set of values for the design variables. Then, the vehicle model is simulated again to achieve the values of the objective and constraint functions. The simulation results are fed back into the optimization algorithm to generate another new set of design variables. This iterative process repeats until the optimization process is finished. Note that the design variables remain within their limitation boundaries during this process.
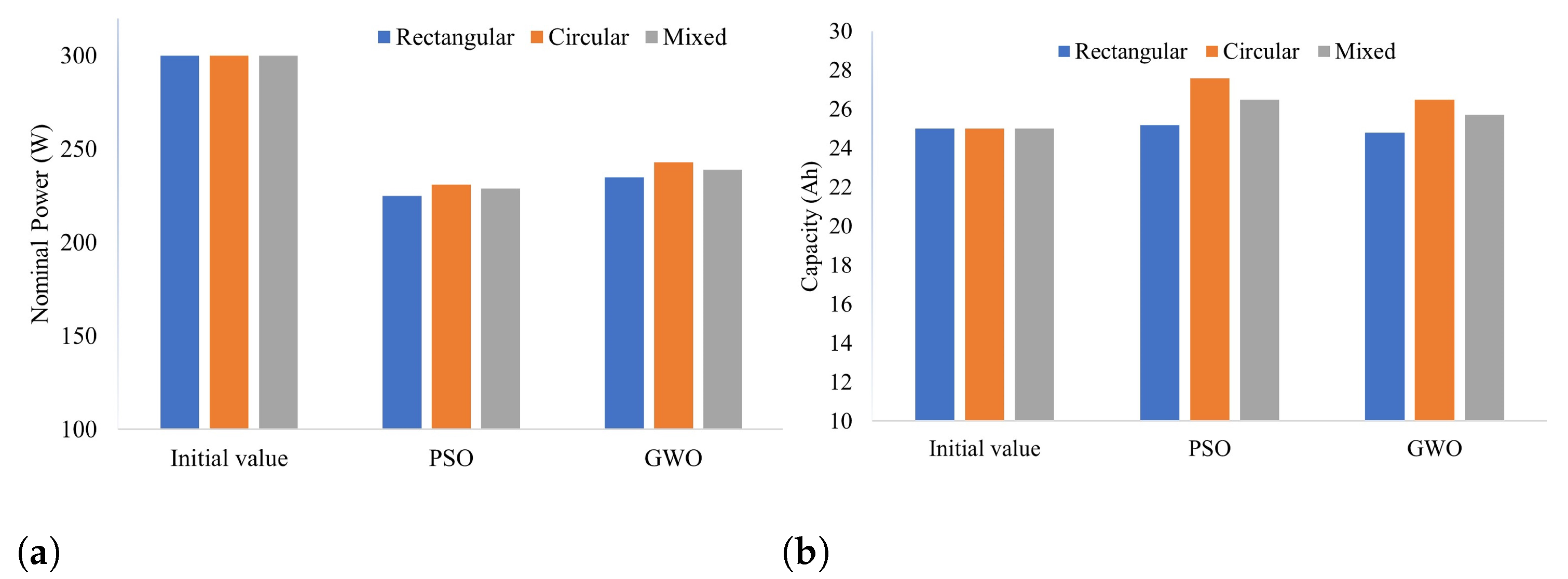
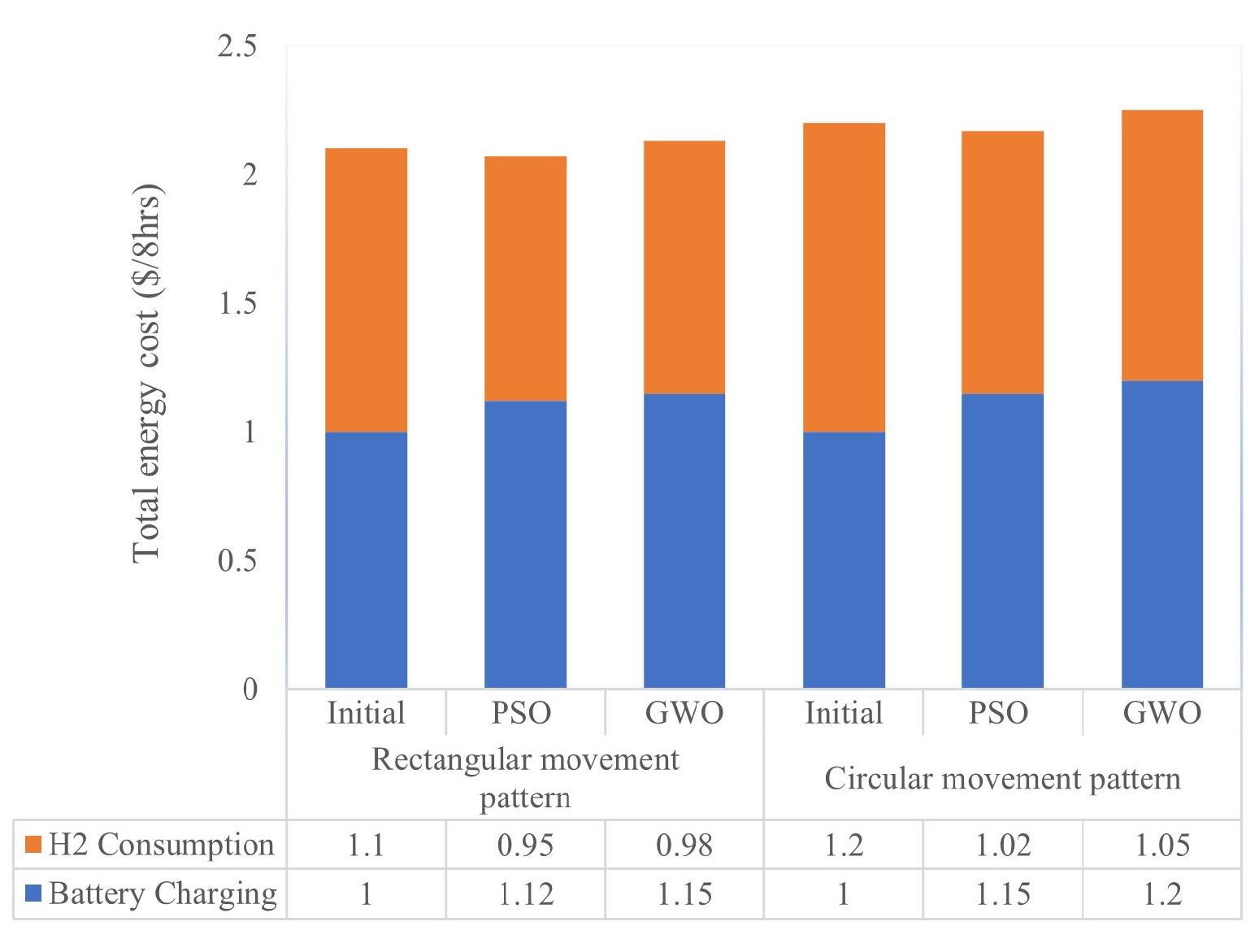
As a case study, the model in the loop has been programmed in MATLAB to optimize a PV/FCAMR for the overall vehicle powertrain cost on the extracted typical working cycles. The input variables including FC nominal power, battery capacity, hydrogen consumption, and electricity usage should be optimized. As the four input variables change, the vehicle model performs vehicle performance tests while checking constraints’ boundaries. The optimization process uses previous results to change the input parameters. A feedback process is then performed until the algorithm finds the optimal value for the objective function to find a trade-off relationship between FC and battery size.
Table 3 shows the design variables used in this study with the boundary values. Accordingly, the optimization objective function (
J) is defined to minimize powertrain cost of design variables, including the cost of the FC system (
), battery (
), hydrogen (
), and electricity (
) [
34,
45] as following expressions:
where
,
,
, and
are the FC nominal power (
), battery pack capacity (
), mass of hydrogen consumption (
), and electrical energy consumption (
), respectively.
,
,
and
are respectively the unitary cost of FC (
), batteries (
), hydrogen (
), and electricity (
).
The design constraints for both optimization methods are defined and bounded as follows:
where
,
,
,
,
, and
are the minimum and maximum values of the FC power, the battery power, and the battery SOC, respectively. Control strategy parameters include SOC values. At the same time, the design problem’s constraints come from the following required vehicle performance:
It should be noted that the driving speed was limited to 2 m/s to avoid dangerous collisions between the mobile vehicle, workers, crops, etc. In addition, the maximum acceleration rate is limited to 1 m/s in order to use the electric motor at its higher efficiency region and to prevent high mechanical and electrical stresses on components.
3.4. Energy Management Strategy
When an FCAMR is being driven, the small-size range extender FC will provide power for the electric motors belonging to the battery. The batteries are charged when the vehicle is stopped. This task belongs to the EMS system of the hybrid electric powertrain. Two general control strategies, including charge depleting (CD) and charge sustaining (CS) could be used to determine the energy distribution of the FC and battery. In this work, a combination of these strategies is called the charge blending (CB) energy management strategy [
23]. After its battery is fully charged, a PHEV operates in CD mode until its electric energy falls below the defined value, after which it switches to CS mode. The desired objectives in the CB mode include the following: the satisfaction of the power demanded by the motor driver and keeping the SOC as close as possible to the lowest safe level (20%) at the end of the working day. This strategy is suitable for applications where motion parameters (acceleration, velocity, slope, etc.) are the top priority for a low-speed vehicle with frequent stops and starts like an FCAMR. Since these control strategies are employed in the authors’ previous work [
23] is not explained here again.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}