
Source Localisation Using Wavefield Correlation-Enhanced Particle Swarm Optimisation


Abstract
:1. Introduction
2. Amplitude-Particle Swarm Optimisation (A-PSO)
Particle Swarm Optimisation Theory
- As A-PSO relies on the intensity of the received signal, its performance is dependent on the Signal-to-Noise Ratio (SNR). This in turn will limit the maximum range of the algorithm and its ability to follow the gradient of the fitness function.
- Each robot can only calculate the fitness of its current position and therefore, the exploration capabilities of the swarm depend on its span—this is referred to as the Diversity Loss Problem [24]. When the swarm is concentrated in a small area, far away from the source, its exploration and convergence capabilities will be limited.
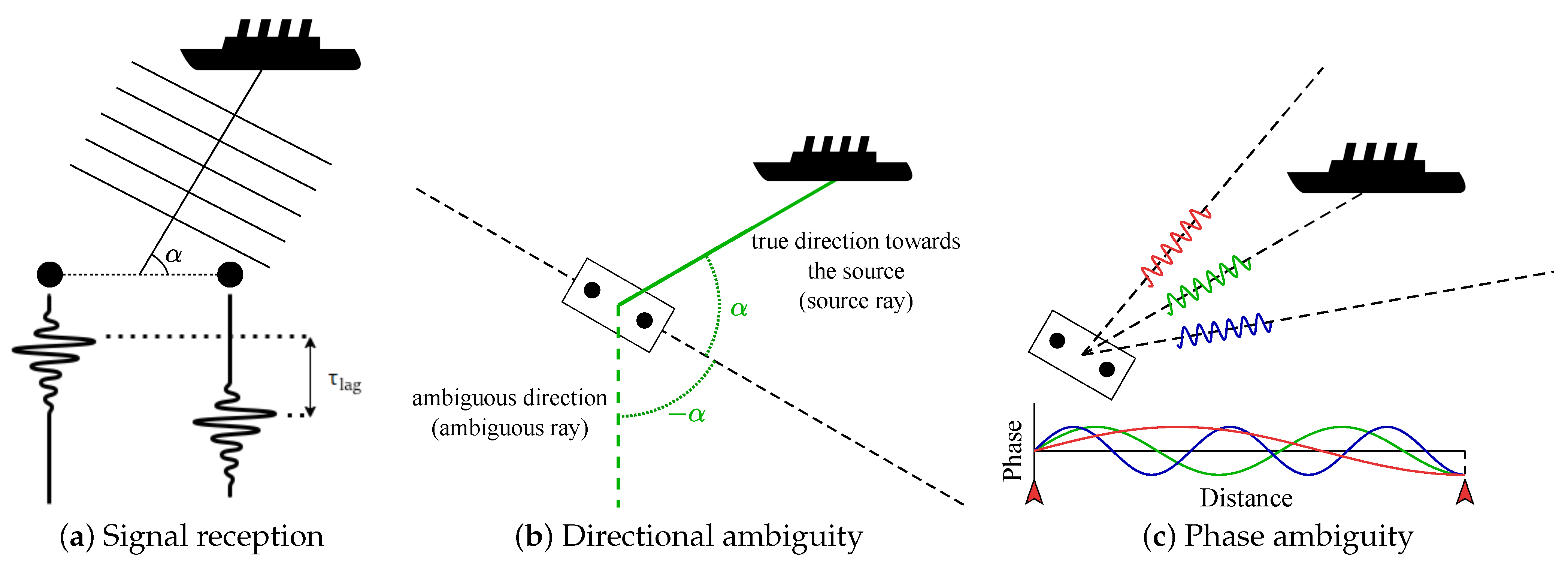
3. Wavefield Correlation PSO
3.1. Cross-Correlation Particle Swarm Optimisation (X-PSO)
3.2. Bearing Particle Swarm Optimisation (B-PSO)
3.3. Cross-Correlation-Bearing Particle Swarm Optimisation (XB-PSO)
4. Simulated Environment
4.1. Robots
4.2. Source
4.3. Normalised Units

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Justification |
|---|---|---|
| Timestep (t) | 1 | A typical controller timestep size for robotic applications. |
| Noise PSD () | 60 dB re 1 μPa2/Hz | Equivalent to a moderate sea state [40]. |
| Source PSD () | 120 dB re 1 μPa2/Hz at 1 m | Equivalent to a typical uncrewed underwater vehicle [37,38]. |
| Reference distance (R) | 1000 m | Calculated using (20). |
| Source centre frequency () | 1 kHz | The central frequency of a typical uncrewed underwater vehicle [37]. |
| Maximum velocity (V) | 2 m/s | Typical uncrewed surface vehicle maximum speed range is 1.5 / to 5 / [41]). |
| Signal propagation speed (c) | 1500 m/s | Speed of sound in water [36]. |
| No. Robots (M) | 10 | Common swarm size in marine robotics [4]. |
| Starting radius () and convergence radius () | 50 m | Sufficient to accommodate 10 robots. |
| Forgetting function scaling parameter (a) | 1 | Frequent updating of personal best locations. |
5. Results
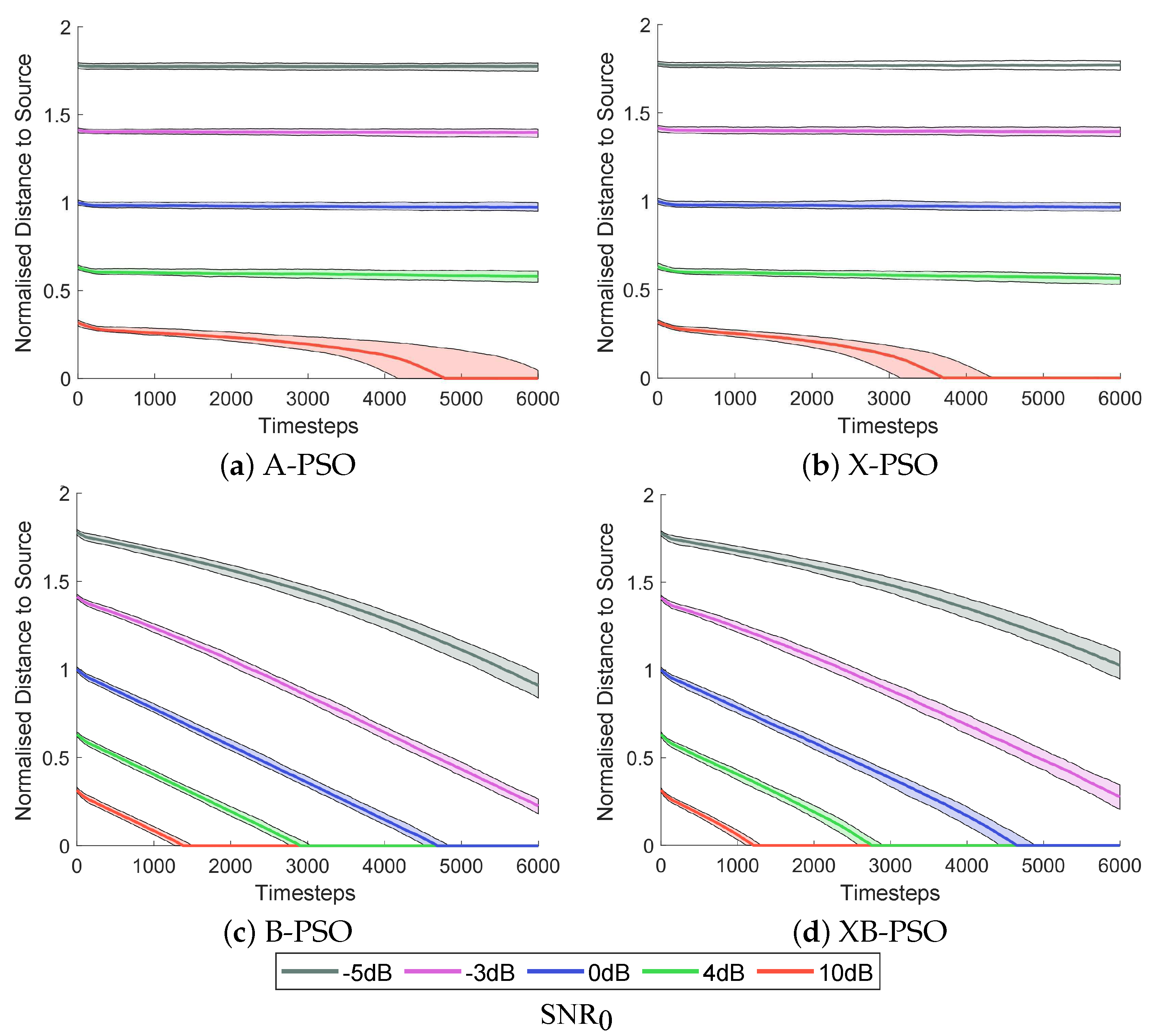
5.1. Initial Signal-to-Noise Ratio
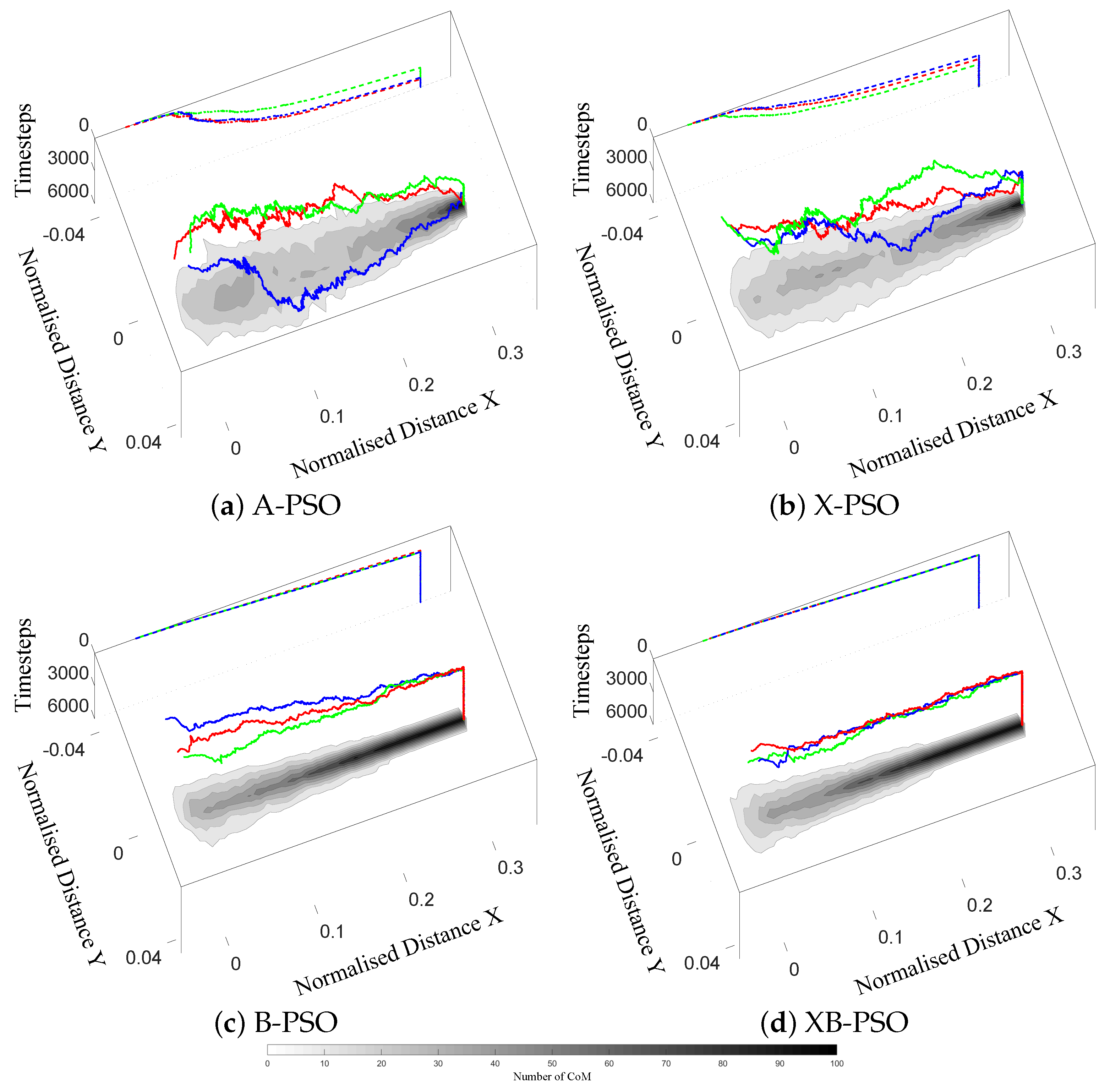
Spatial Analysis
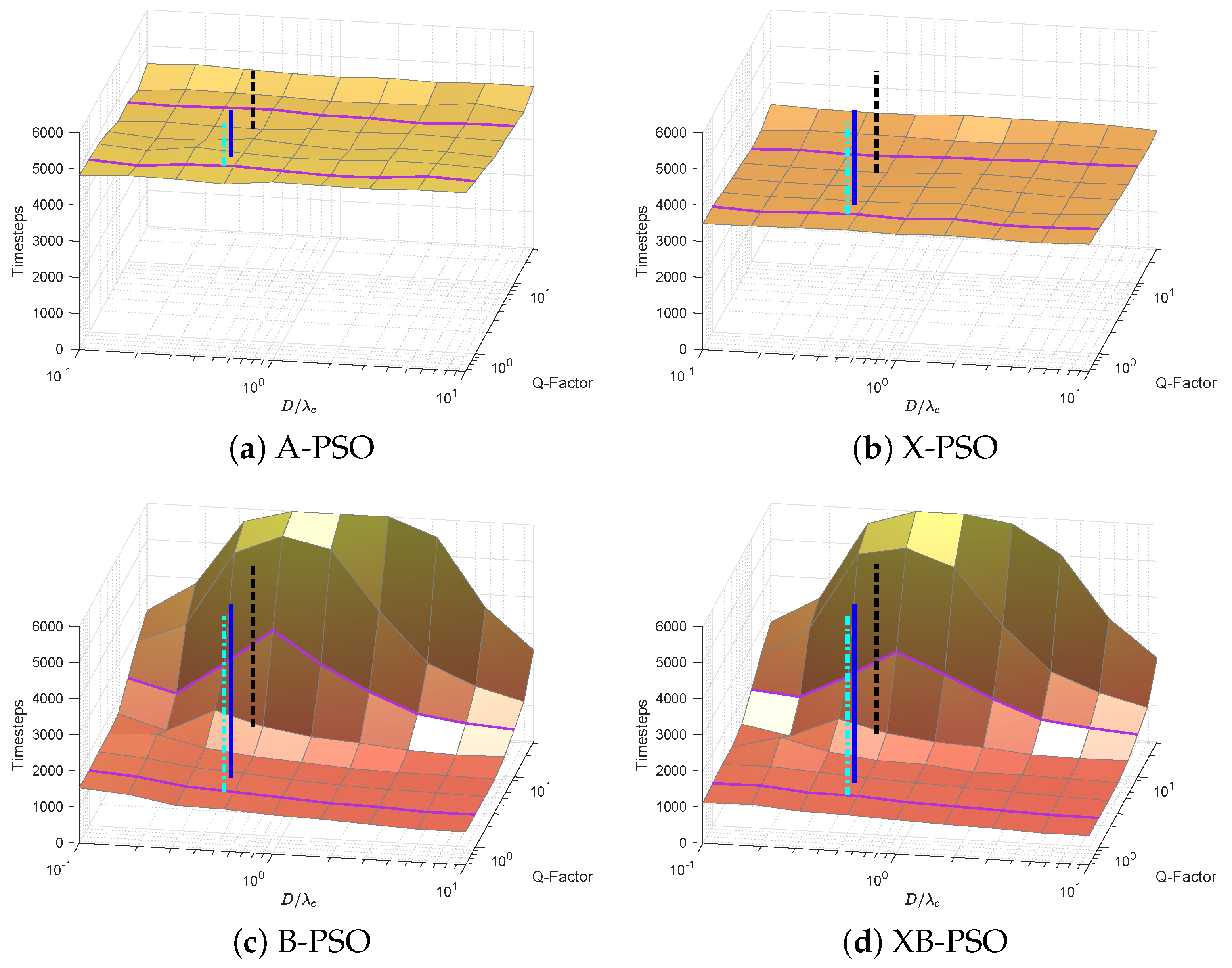
5.2. Q and Sensor Separation
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Algorithms
| Algorithm A1: Personal and global best location selection for A-PSO. |
 |
| Algorithm A2: Personal and global best location selection for X-PSO. |
 |
| Algorithm A3: Personal and global best location selection for B-PSO. |
 |
| Algorithm A4: Personal and global best location selection for XB-PSO. |
 |
References
- Nedjah, N.; Junior, L.S. Review of methodologies and tasks in swarm robotics towards standardization. Swarm Evol. Comput. 2019, 50, 100565. [Google Scholar] [CrossRef]
- Lončar, I.; Babić, A.; Arbanas, B.; Vasiljević, G.; Petrović, T.; Bogdan, S.; Mišković, N. A Heterogeneous Robotic Swarm for Long-Term Monitoring of Marine Environments. Appl. Sci. 2019, 9, 1388. [Google Scholar] [CrossRef] [Green Version]
- Gupta, R.; Bayal, R.K. Source Detection of Oil Spill using Modified Glowworm Swarm optimization. In Proceedings of the 2020 5th International Conference on Computing, Communication and Security (ICCCS), Patna, India, 14–16 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Griffiths Sànchez, N.D.; Vargas, P.A.; Couceiro, M.S. A Darwinian Swarm Robotics Strategy Applied to Underwater Exploration. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Senanayake, M.; Senthooran, I.; Barca, J.C.; Chung, H.; Kamruzzaman, J.; Murshed, M. Search and tracking algorithms for swarms of robots: A survey. Robot. Auton. Syst. 2016, 75, 422–434. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Nanjing, China, 10–13 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Krishnanand, K.N.; Ghose, D. Glowworm swarm optimization for simultaneous capture of multiple local optima of multimodal functions. Swarm Intell. 2009, 3, 87–124. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Yang, X.S. Firefly Algorithm, Stochastic Test Functions and Design Optimisation. Int. J. Bio-Inspired Comput. 2010, 2, 78–84. [Google Scholar] [CrossRef]
- Marques, L.; Nunes, U.; de Almeida, A.T. Particle swarm-based olfactory guided search. Auton. Robot. 2006, 20, 277–287. [Google Scholar] [CrossRef] [Green Version]
- Meng, Q.H.; Yang, W.X.; Wang, Y.; Zeng, M. Collective Odor Source Estimation and Search in Time-Variant Airflow Environments Using Mobile Robots. Sensors 2011, 11, 10415–10443. [Google Scholar] [CrossRef] [Green Version]
- Feng, Q.; Zhang, C.; Lu, J.; Cai, H.; Chen, Z.; Yang, Y.; Li, F.; Li, X. Source localization in dynamic indoor environments with natural ventilation: An experimental study of a particle swarm optimization-based multi-robot olfaction method. Build. Environ. 2019, 161, 106228. [Google Scholar] [CrossRef]
- Couceiro, M.S.; Rocha, R.P.; Ferreira, N.M.F. A PSO multi-robot exploration approach over unreliable MANETs. Adv. Robot. 2013, 27, 1221–1234. [Google Scholar] [CrossRef]
- Yang, J.; Wang, X.; Bauer, P. Extended PSO Based Collaborative Searching for Robotic Swarms with Practical Constraints. IEEE Access 2019, 7, 76328–76341. [Google Scholar] [CrossRef]
- Rossides, G.; Metcalfe, B.; Hunter, A. Particle Swarm Optimization—An Adaptation for the Control of Robotic Swarms. Robotics 2021, 10, 58. [Google Scholar] [CrossRef]
- Hereford, J.M.; Siebold, M.; Nichols, S. Using the Particle Swarm Optimization Algorithm for Robotic Search Applications. In Proceedings of the 2007 IEEE Swarm Intelligence Symposium, Honolulu, HI, USA, 1–5 April 2007; pp. 53–59. [Google Scholar] [CrossRef]
- Perreault, L.; Wittie, M.P.; Sheppard, J. Communication-aware distributed PSO for dynamic robotic search. In Proceedings of the 2014 IEEE Symposium on Swarm Intelligence, Orlando, FL, USA, 9–12 December 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Du, Y. A Novel Approach for Swarm Robotic Target Searches Based on the DPSO Algorithm. IEEE Access 2020, 8, 226484–226505. [Google Scholar] [CrossRef]
- Bakhale, M.; Hemalatha, V.; Dhanalakshmi, S.; Kumar, R.; Siddharth Jain, M. A Dynamic Inertial Weight Strategy in Micro PSO for Swarm Robots. Wirel. Pers. Commun. 2020, 110, 573–592. [Google Scholar] [CrossRef]
- Poursheikhali, S.; Zamiri-Jafarian, H. TDOA based target localization in inhomogenous underwater wireless sensor network. In Proceedings of the 2015 5th International Conference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 29 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, B.; Hu, Y.; Wang, H.; Zhuang, Z. Underwater Source Localization Using TDOA and FDOA Measurements with Unknown Propagation Speed and Sensor Parameter Errors. IEEE Access 2018, 6, 36645–36661. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X.; Zhang, W. Direction of Arrival Estimation Using Two Hydrophones: Frequency Diversity Technique for Passive Sonar. Sensors 2019, 19, 2001. [Google Scholar] [CrossRef] [Green Version]
- Cleghorn, C.W.; Engelbrecht, A.P. Particle swarm stability: A theoretical extension using the non-stagnate distribution assumption. Swarm Intell. 2018, 12, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Blackwell, T. Particle Swarm Optimization in Dynamic Environments. In Evolutionary Computation in Dynamic and Uncertain Environments; Yang, S., Ong, Y.S., Jin, Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 29–49. [Google Scholar] [CrossRef] [Green Version]
- Carlisle, A.; Dozier, G. Adapting Particle Swarm Optimization to Dynamic Environments. In Proceedings of the International Conference on Artificial Intelligence, Acapulco, Mexico, 11–14 April 2000. [Google Scholar]
- Fernandez-Marquez, J.L.; Arcos, J.L. An Evaporation Mechanism for Dynamic and Noisy Multimodal Optimization. In Proceedings of the 11th Annual Conference on Genetic and Evolutionary Computation (GECCO ’09), Montreal, QC, Canada, 8–12 July 2009; Association for Computing Machinery: New York, NY, USA, 2009; pp. 17–24. [Google Scholar] [CrossRef]
- White, K.G. Forgetting functions. Anim. Learn. Behav. 2001, 29, 193–207. [Google Scholar] [CrossRef]
- Munoz, D.; Bouchereau, F.; Vargas, C.; Enriquez, R. CHAPTER 2—Signal Parameter Estimation for the Localization Problem. In Position Location Techniques and Applications; Munoz, D., Bouchereau, F., Vargas, C., Enriquez, R., Eds.; Academic Press: Oxford, UK, 2009; pp. 23–65. [Google Scholar] [CrossRef]
- Zhang, J.; Cao, L.; Zhang, Z.; Xu, J. Research on the signal separation method based on multi-sensor cross-correlation fusion algorithm. In Proceedings of the 2017 3rd IEEE International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, China, 17–19 August 2017; pp. 561–564. [Google Scholar] [CrossRef]
- Mikhael, M.R.M.; Alink, M.S.O.; Kokkeler, A.B.J. Using Multiple Chains in Cross-Correlation Receivers to Improve Sensitivity. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Schneider, P.J.; Eberly, D.H. CHAPTER 7-INTERSECTION IN 2D. In Geometric Tools for Computer Graphics; The Morgan Kaufmann Series in Computer Graphics; Schneider, P.J., Eberly, D.H., Eds.; Morgan Kaufmann: San Francisco, CA, USA, 2003; pp. 241–284. [Google Scholar] [CrossRef]
- Railey, K. Demonstration of Passive Acoustic Detection and Tracking of Unmanned Underwater Vehicles. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2018. [Google Scholar]
- Railey, K.; DiBiaso, D.; Schmidt, H. An acoustic remote sensing method for high-precision propeller rotation and speed estimation of unmanned underwater vehicles. J. Acoust. Soc. Am. 2020, 148, 3942–3950. [Google Scholar] [CrossRef]
- Railey, K.; Dibiaso, D.; Schmidt, H. Passive acoustic detection and tracking of an unmanned underwater vehicle from motor noise. J. Acoust. Soc. Am. 2021, 149, A34–A35. [Google Scholar] [CrossRef]
- Open Cooperation for European mAritime awareNess. Ocean2020 Mediterranean Sea Trials. 2021. Available online: https://ocean2020.eu/sea-trials/ (accessed on 20 August 2021).
- Kuperman, W.A. Acoustics, Deep Ocean. In Encyclopedia of Ocean Sciences; Steele, J.H., Ed.; Academic Press: Oxford, UK, 2001; pp. 61–72. [Google Scholar] [CrossRef]
- Gebbie, J.; Siderius, M.; Allen, J.S.R. Aspect-dependent radiated noise analysis of an underway autonomous underwater vehicle. J. Acoust. Soc. Am. 2012, 132, EL351–EL357. [Google Scholar] [CrossRef] [PubMed]
- Zimmerman, R.; D’Spain, G.L.; Chadwell, C.D. Decreasing the radiated acoustic and vibration noise of a mid-size AUV. IEEE J. Ocean. Eng. 2005, 30, 179–187. [Google Scholar] [CrossRef]
- Holmes, J.D.; Carey, W.M.; Lynch, J.F. An overview of unmanned underwater vehicle noise in the low to mid frequencies bands. Proc. Meet. Acoust. 2010, 9, 65007. [Google Scholar] [CrossRef] [Green Version]
- Xerandy, X.; Znati, T.; K, L. Cost-Effective, Cognitive Undersea Network for Timely and Reliable Near-Field Tsunami Warning. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 224–233. [Google Scholar] [CrossRef] [Green Version]
- Verfuss, U.K.; Aniceto, A.S.; Harris, D.V.; Gillespie, D.; Fielding, S.; Jiménez, G.; Johnston, P.; Sinclair, R.R.; Sivertsen, A.; Solbø, S.A.; et al. A review of unmanned vehicles for the detection and monitoring of marine fauna. Mar. Pollut. Bull. 2019, 140, 17–29. [Google Scholar] [CrossRef] [PubMed]
- Hildebrand, J. Impacts of Anthropogenic Sound on Cetaceans. In Marine Mammal Research: Conservation Beyond Crisis; Reynolds, J.E., Perrin, W.F., Reeves, R.R., Montgomery, S., Eds.; Johns Hopkins University Press: Baltimore, MD, USA, 2005. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rossides, G.; Hunter, A.; Metcalfe, B. Source Localisation Using Wavefield Correlation-Enhanced Particle Swarm Optimisation. Robotics 2022, 11, 52. https://doi.org/10.3390/robotics11020052
Rossides G, Hunter A, Metcalfe B. Source Localisation Using Wavefield Correlation-Enhanced Particle Swarm Optimisation. Robotics. 2022; 11(2):52. https://doi.org/10.3390/robotics11020052
Chicago/Turabian StyleRossides, George, Alan Hunter, and Benjamin Metcalfe. 2022. "Source Localisation Using Wavefield Correlation-Enhanced Particle Swarm Optimisation" Robotics 11, no. 2: 52. https://doi.org/10.3390/robotics11020052