
Survivability Analysis of Unmanned Aerial Vehicle Network based on Dynamic Weighted Clustering Algorithm with Dual Cluster Heads

Abstract
:1. Introduction
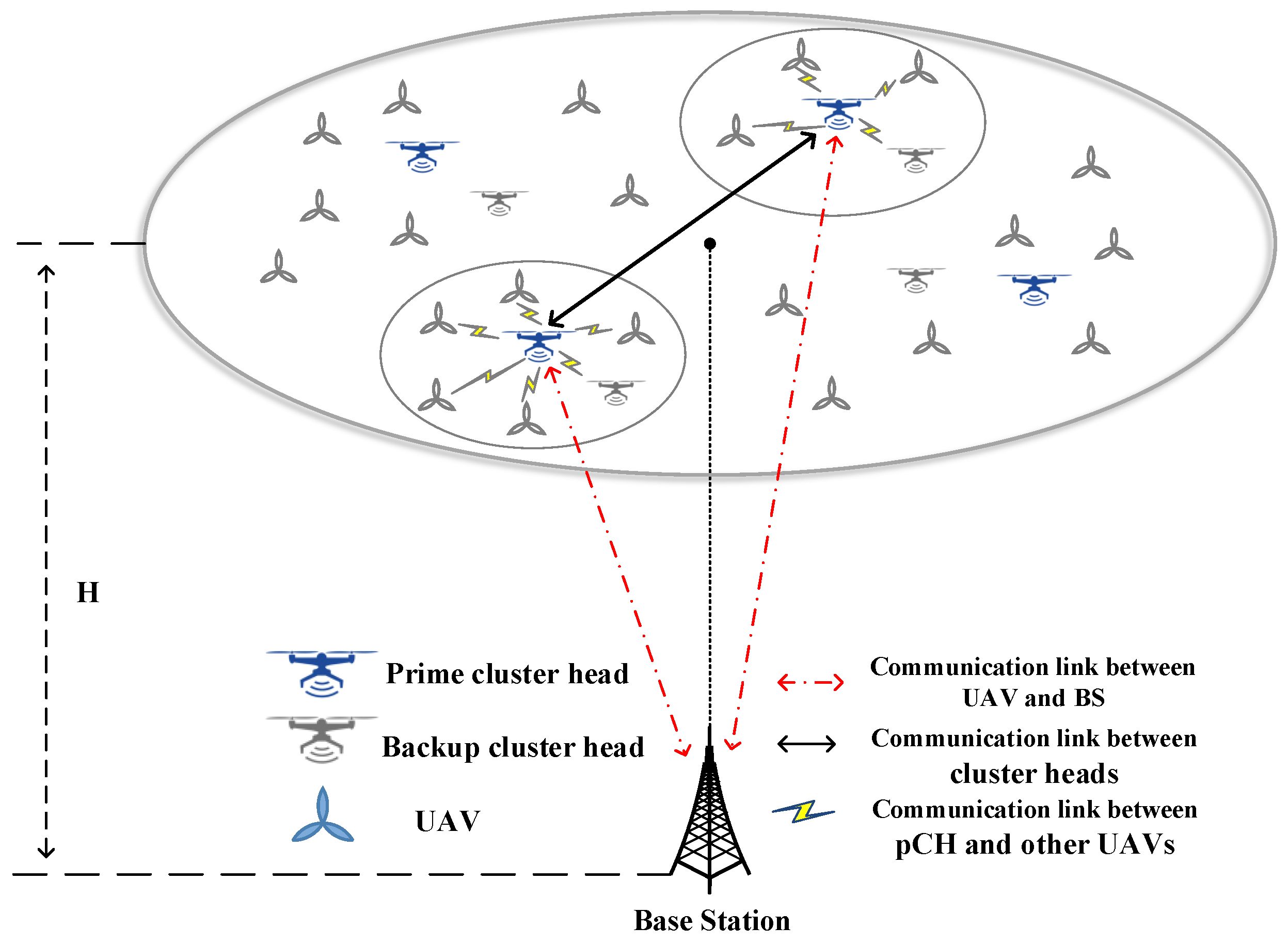
- We propose a DWCA-DCH to improve the network’s stability and availability by selecting the prime cluster head (pCH) with higher communication quality and the backup cluster head (bCH) with higher stability. By introducing the dual cluster head mechanism, the bCH can take over the role of the pCH when the pCH fails to continue data transmission, thereby improving the system availability.
- Additionally, we propose the survivability analysis method based on Markov process (SAM-MP) to evaluate the survivability performance of the UAV cluster network and analyze the ability of the proposed UAV cluster network based on DWCA-DCH to complete the communication service when the system suffers from energy depletion, failure, or accidents.
- Simulation results demonstrate the effectiveness of the proposed algorithm in improving system availability and stability. The results also showcase the feasibility of the proposed SAM-MP for analyzing the survivability of the UAV network.
2. Related Work
3. System Model
4. Dynamic Weighted Clustering Algorithm with Dual Cluster Heads
4.1. Weight Factor
- Degree. If the cluster is too large, the load of the cluster head will be too high and the system efficiency will be degraded. If the clustering is too small, too few nodes in the cluster will result in resource waste. In order to realize balanced clustering, the concept of degree is introduced to measure the difference between the number of neighbor nodes and the size of the ideal cluster, which is denoted by:where is the ideal cluster size, is the number of neighbor nodes of UAV i in set , is the set of unclustered nodes during the initial clustering stage and the node set of the currently maintained cluster during the dynamic maintenance stage. is expressed as , where represents the distance between UAV i and , represents the signal receiving distance of the UAV, which is the distance between the transmitter and the receiver when the receiving power is greater than the threshold. According to the free space propagation model, [24], where is the transmit power of the UAV, and are the antenna gains at the transmitter and the receiver, respectively. In addition, is the wavelength, L is the loss factor independent of propagation, and is the threshold of receiving power.
- Distance. The signal intensity between two UAV nodes is affected by the distance between them [25]. When a node in a cluster is far away from the cluster head, the communication efficiency will be degraded due to signal attenuation. According to [25], air-to-air (A2A) channels obey line of sight (LoS) fading, and signal attenuation is proportional to the square of the distance. The distance factor represents the sum of the distance between node i to all its neighbors, which can be expressed as:where and are the horizontal and vertical coordinates of UAV i, respectively. is the set of neighbor nodes of UAV i.
- Communication quality. In order to ensure the communication connection between air network and gBS, the cluster head node needs to ensure good quality of the air-to-ground channel. The path loss factor is utilized for the air-to-ground path loss of node i, the lower the is, the better the communication is between the node i and the gBS. can be expressed as [26]where , , and are the excessive path loss of LoS condition or non-line-of-sight (NLoS) condition, while f is the frequency of the UAV, c is the speed of light, is the elevation angle satisfying , is the horizontal distance between UAV i and gBS, , and are the coordinates of gBS, and a and b are constants related to the communication environment.
- Stability. Since UAVs have strong mobility, relative mobility is used to measure the stability of nodes in the cluster. The smaller the relative moving speed of a cluster head node and its neighbors is, the longer the cluster head node stays in the cluster, i.e., the stronger the stability of the cluster is. The stability factor is expressed aswhere and are the angular velocity of UAV i and , respectively. Since we assume that all UAVs fly at the same height and their flight trajectories are circles centered on the gBS, the difference of angular velocity between a UAVs nodes can be used to represent the relative position change between nodes, i.e., the stability within the cluster.
- Energy. The remaining energy of the UAV determines its remaining lifetime. The UAV that becomes the cluster head node needs to maintain as long of a lifetime as possible to maintain the intracluster communication. The energy factor is represented by the comsumed energy , the lower is, the longer the remaining lifetime of the node is. is expressed aswhere and represent the initial and remaining energy of the UAV, respectively.
4.2. Weight Calculation
4.3. Algorithm Procedure
| Algorithm 1 Dynamic Weighted Clustering Algorithm with Dual Cluster Heads |
|
5. Survivability Analysis
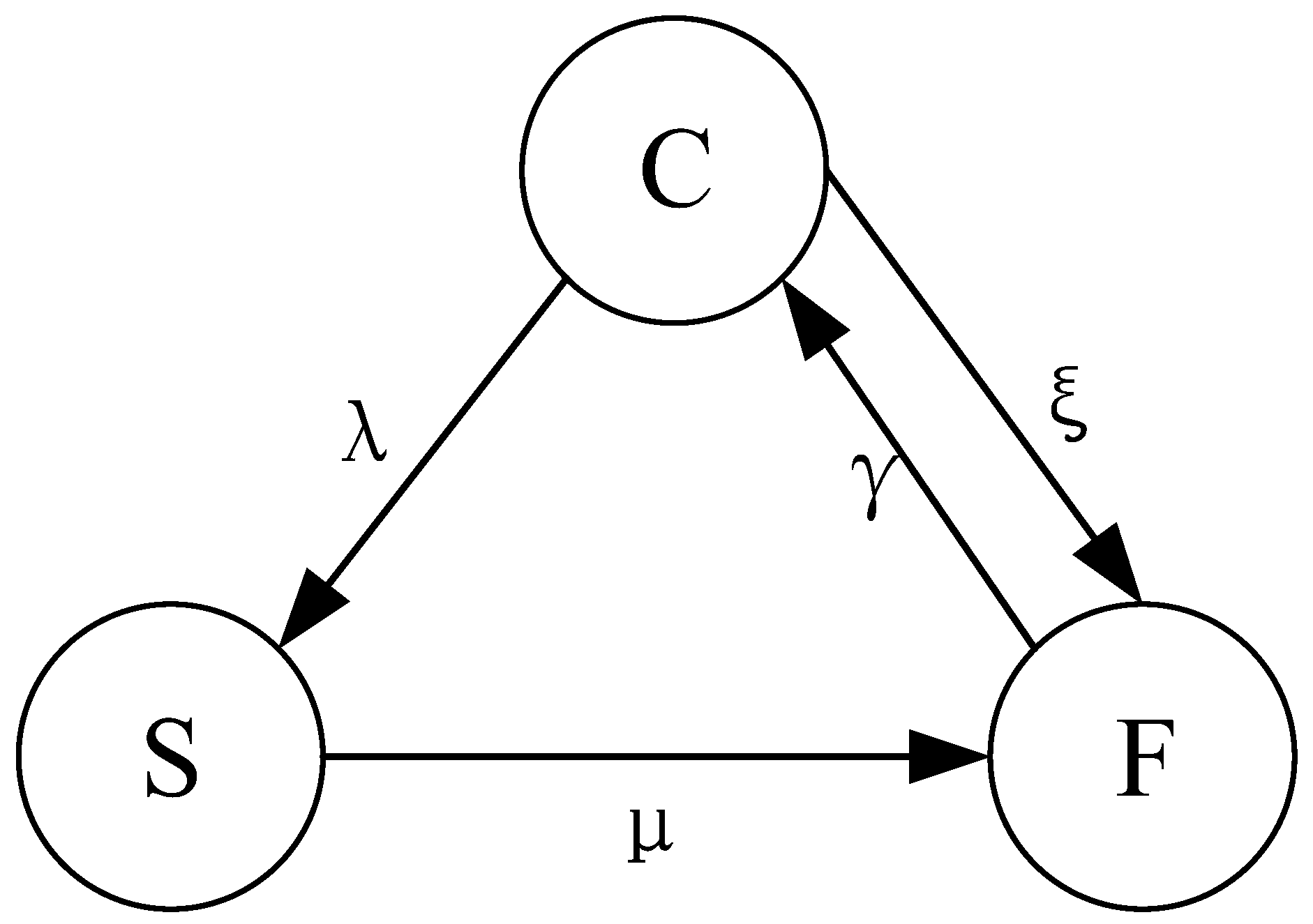
- Cooperative state (C), where UAVs can complete data acquisition, processing, receiving, and transmitting normally.
- Selfish state (S), where the UAV’s remaining energy is lower than the threshold . In this case, the UAV only receives data and no longer transmits data. In addition, the UAV will fly to the charging pile.
- Failure state (F), when the energy of the UAV is exhausted or the UAV fails, it will enter into the failure state. In addition, the UAV is also in this state during charging or maintaining period.
- R(C, S) = , which denotes the transition probability of the node from state C to state S. The transition happens along with the natural energy consumption process of UAVs. Therefore, is related to the energy consumption rate of UAVs. Since the energy consumption of UAV communication is far less than that of its flight, only the flight energy consumption of a UAV is considered in this paper. The following is the calculation process.Assuming that the lifetime of the UAV follows the Weibull distribution [27], whose probability density function iswhere is the scale parameter. k is the shape parameter and , the value of k can be adjusted according to the requirements of the actual scenario. t is the random variable representing the lifetime of the UAV.When the remaining UAV energy is less than the energy threshold , the state of the node transfers from C to S, which follows:where and are the initial and consumed energy, respectively. P is the horizontal flying power of UAV. Accordingly, the lifetime of UAV can be denoted bywhere the horizontal flying power P is given by [28,29] aswhere is the parasitic power caused by the parasitic drag originating from the UAV’s body friction from airlift drag, etc. It can be expressed as [29,30]where is the air fluid density in kg/m, is the drag coefficient, S is the reference area (frontal area of the UAV-BS), M is the UAV rotor number, is the blade chord, is the angular velocity, v represents the velocity in the horizontal direction, is the radius of the rotor spinning disk in m.denotes the power for the lift generated by the wing to overcome the weight of the UAV-BS and the drag caused by the lift, and can be obtained by [28,29]where W is the frame weight of the UAV in kg, w is the battery and payload weight in kg, given the gravity g in m/s.Consequently, the transition probability of the UAV from state C to S is expressed as
- R(S, F) = , which denotes the transition probability of the node from state S to state F. There are two situations in this process: (1) the energy of the UAV is exhausted; (2) the UAV fails to provide services due to faults or other accidents.
- R(F, C) = , which denotes the transition probability of the node from state F to state C. There are also two situations in this process: (1) the UAV finishes charging and restores to provide service; (2) the fault of the UAV is repaired.
- R(C, F) = , which denotes the transition probability of the node from state C to state F. The process takes into account situations where the UAV malfunctions or other accidents prevent it from continuing to provide service.
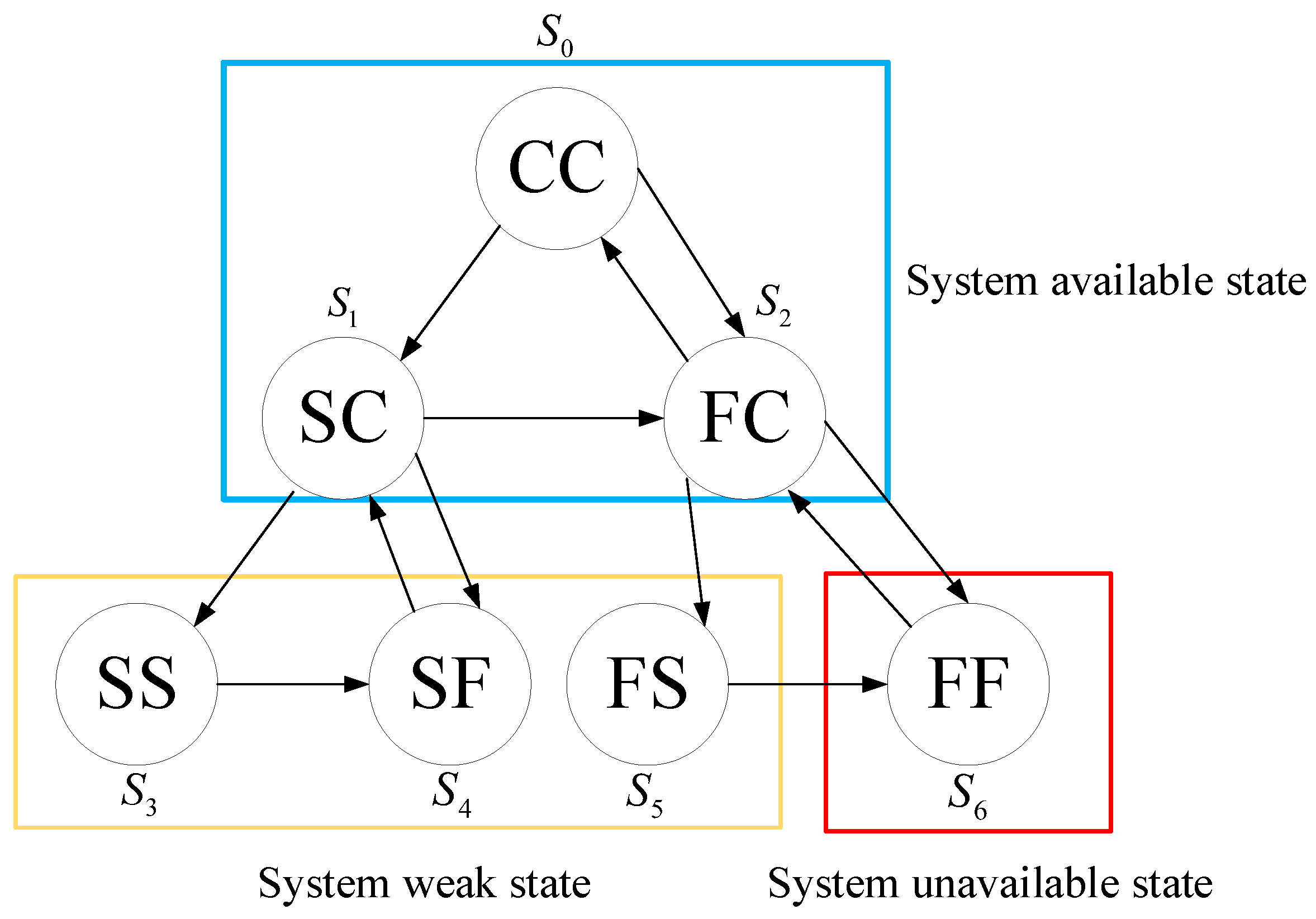
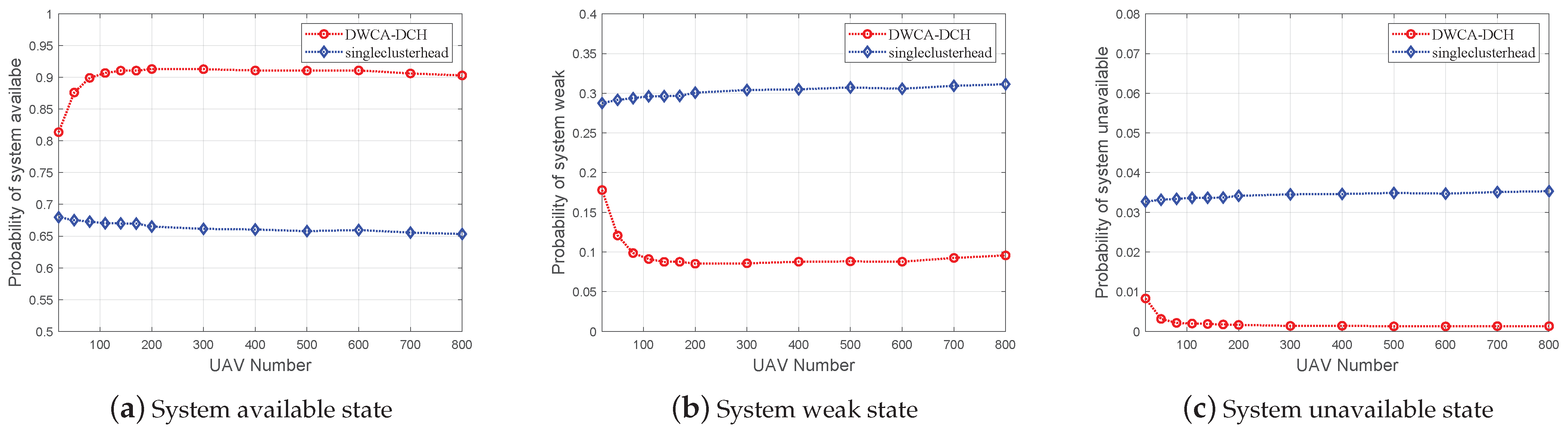
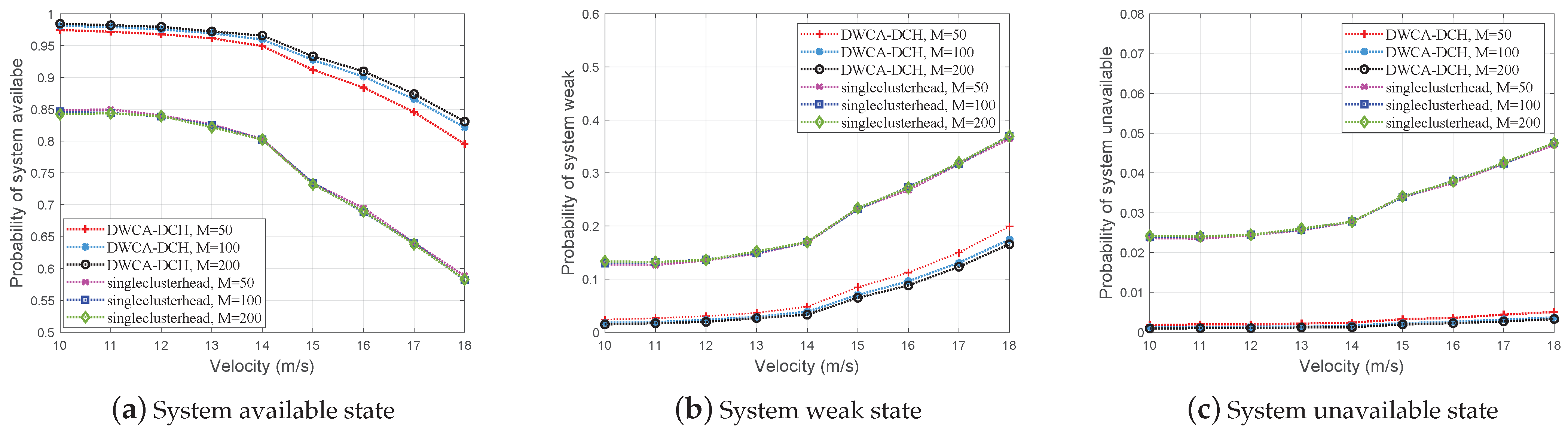
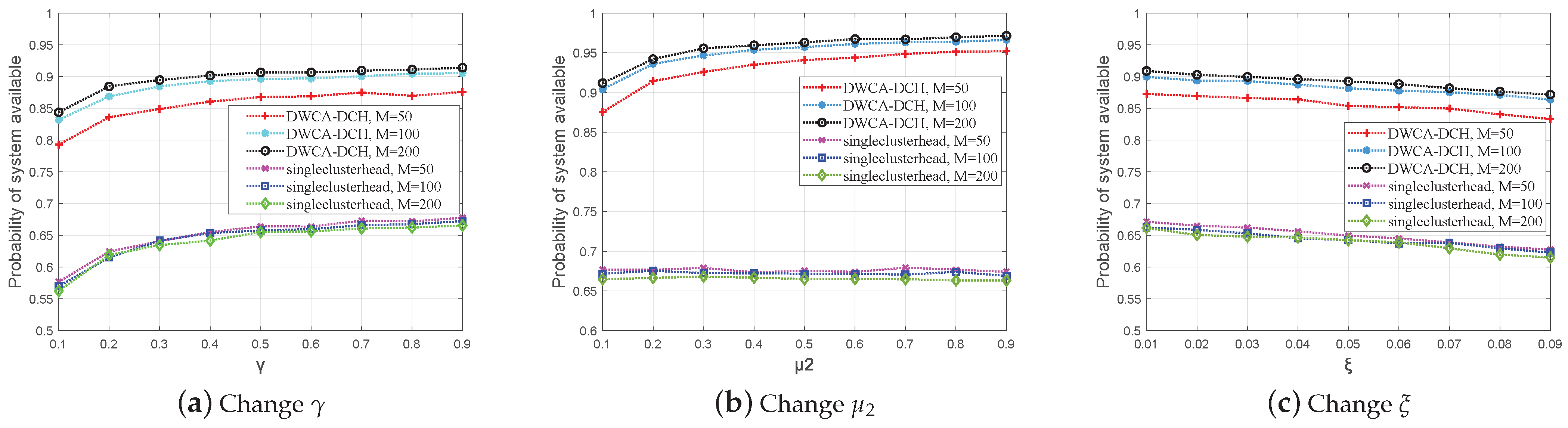
- System available state, which includes states , , and . In this state, at least one of the pCH and the bCH are in the C state and can provide data gathering, receiving, processing, and transmitting services. In addition, when the pCH is in the C state and bCH is in the S or F state, the bCH should be reselected in time to guarantee the availability of the system. The corresponding probability is expressed as
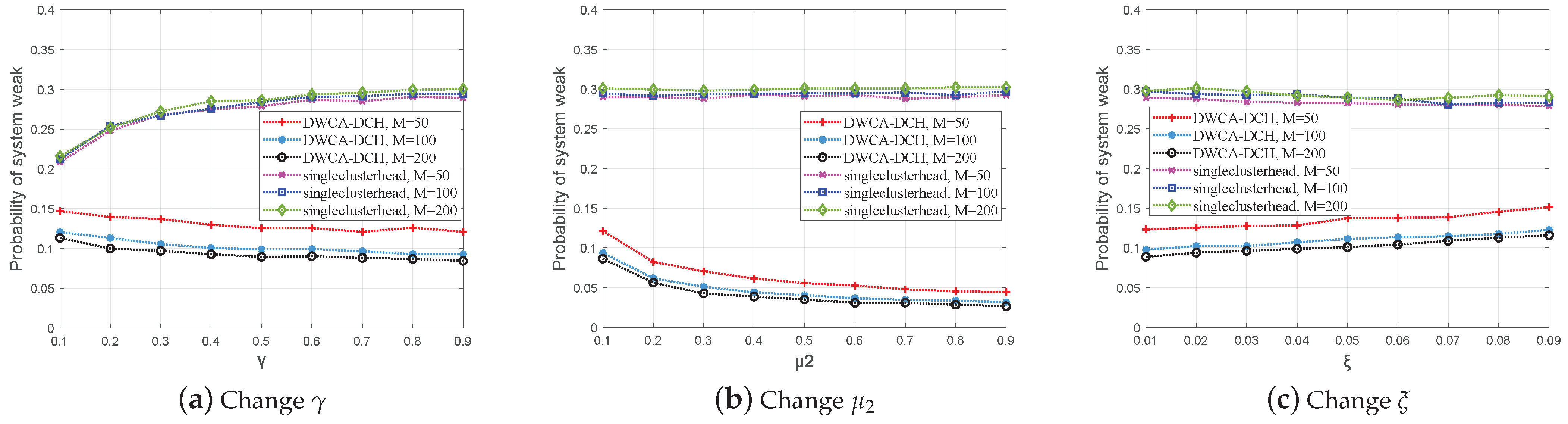
- System weak state, which includes states , , and . In this state, both the pCH and the bCH are not in the C state, but can still receive data. This state can be regarded as an emergency state of the system. In order to ensure that the system is restored to the available state, the cluster head node needs to be charged or maintained as soon as possible after the system enters the weak state to ensure normal service. When the bCH is in S state, the bCH will enter the F state as soon as possible and fly to the charging pile to charge, so as to restore the system to available as soon as possible. The corresponding probability is expressed as
- System unavailable state, which includes state . In this state, pCH and bCH are all in state F and cannot provide service. The corresponding probability is expressed as
6. Applicability of DWCA-DCH in Post-Disaster Scenarios
7. Simulation Results
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DWCA-DCH | Dynamic weighted clustering algorithm with dual cluster heads |
| SAM-MP | Survivability analysis method based on Markov process |
| UAV | Unmanned aerial vehicle |
| FANETs | Flying ad hoc network |
| WCA | Weighted clustering algorithm |
| MLSC | Mobility and location-aware stable clustering |
| SIC | Swarm intelligence-based clustering |
| PSO | Particle swarm optimization |
| pCH | Prime cluster head |
| bCH | Backup cluster head |
| gBS | Ground base station |
| A2A | Air-to-air |
| LoS | Line of sight |
| NLoS | Non-line-of-sight |
| C | Cooperative state |
| S | Selfish state |
| F | Failure state |
| AI | Artificial intelligence |
References
- Li, B.; Fei, Z.; Zhang, Y. Uav communications for 5g and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Bor-Yaliniz, I.; Yanikomeroglu, H. The new frontier in ran heterogeneity: Multi-tier drone-cells. IEEE Commun. Mag. Artic. News Events Interest Commun. Eng. 2016, 54, 48–55. [Google Scholar] [CrossRef] [Green Version]
- Merwaday, A.; Tuncer, A.; Kumbhar, A.; Guvenc, I. Improved throughput coverage in natural disasters: Unmanned aerial base stations for public-safety communications. IEEE Veh. Technol. Mag. 2016, 11, 53–60. [Google Scholar] [CrossRef]
- Dong, M.; Ota, K.; Lin, M.; Tang, Z.; Du, S.; Zhu, H. Uav-assisted data gathering in wireless sensor networks. J. Supercomput. 2014, 70, 1142–1155. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, S. Flying ad-hoc networks (fanets): A survey. Ad. Hoc. Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Localization and clustering based on swarm intelligence in uav networks for emergency communications. IEEE Internet Things J. 2019, 6, 8958–8976. [Google Scholar] [CrossRef]
- Khan, M.F.; Yau, K.L.A.; Ling, M.H.; Imran, M.A.; Chong, Y.W. An Intelligent Cluster-Based Routing Scheme in 5G Flying Ad Hoc Networks. Appl. Sci. 2022, 12, 3665. [Google Scholar] [CrossRef]
- Srivastava, A.; Prakash, J. Future FANET with application and enabling techniques: Anatomization and sustainability issues. Comput. Sci. Rev. 2021, 39, 100359. [Google Scholar] [CrossRef]
- Sadraey, M. Unmanned Aircraft Design: A Review of Fundamentals. Synth. Lect. Mech. Eng. 2017, 1, 193. [Google Scholar]
- Joa-Ng, M.; Lu, I.T. A peer-to-peer zone-based two-level link state routing for mobile ad hoc networks. IEEE J. Sel. Areas Commun. 1999, 17, 1415–1425. [Google Scholar] [CrossRef] [Green Version]
- Chatterjee, M.; Das, S.K.; Turgut, D. Wca: A weighted clustering algorithm for mobile ad hoc networks. Clust. Comput. 2002, 5, 193–204. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. A survey on cluster-based routing protocols for unmanned aerial vehicle networks. IEEE Access 2018, 7, 498–516. [Google Scholar] [CrossRef]
- Xia, X.; Yan, Y.; Li, Z.; Meng, D.; Xia, L.; Chen, C. A survey of UAV clustering algorithm. In Proceedings of the 2022 24th International Conference on Advanced Communication Technology (ICACT), Pyeongchang, Republic of Korea, 13–16 February 2022; pp. 191–196. [Google Scholar]
- Bhandari, S.; Wang, X.; Lee, R. Mobility and location-aware stable clustering scheme for uav networks. IEEE Access 2020, 8, 106364–106372. [Google Scholar] [CrossRef]
- Kovalenko, V.; Alzaghir, A.; Volkov, A.; Muthanna, A.; Koucheryavy, A. Clustering algorithms for uav placement in 5G and beyond networks. In Proceedings of the 2020 12th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Brno, Czech Republic, 5–7 October 2020. [Google Scholar]
- Aadil, F.; Raza, A.; Khan, M.F.; Maqsood, M.; Mehmood, I.; Rho, S. Energy aware cluster based routing in flying ad-hoc networks. Sensors 2018, 18, 1413. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.; Aftab, F.; Zhang, Z. BICSF: Bio-Inspired Clustering Scheme for FANETs. IEEE Access 2019, 7, 31446–31456. [Google Scholar] [CrossRef]
- Fang, K.; Ru, L.; Yu, Y.; Jia, X.; Liu, S. An energy balance and mobility prediction clustering algorithm for large-scale UAV ad hoc networks. Eng. Rev. 2019, 39, 1–10. [Google Scholar] [CrossRef]
- Yi, Z.; Dohi, T.; Okamura, H. Survivability modeling and analysis for a power-aware wireless ad hoc network. In Proceedings of the 2012 IV International Congress on Ultra Modern Telecommunications and Control Systems, St. Petersburg, Russia, 3–5 October 2012. [Google Scholar]
- Halim, A.; Ahmad, R.; Noh, Z. Survivability Modeling and Analysis of Mobile Ad Hoc Network with Correlated Node Behavior. Procedia Eng. 2013, 53, 435–440. [Google Scholar]
- Yu, J.; Yu, Z.; Ding, M.; Ye, W. Research on the Tenacity Survivability of Wireless Sensor Networks. J. Ambient Intell. Humaniz. Comput. 2020, 11, 3535–3544. [Google Scholar] [CrossRef]
- Su, W.; Lee, S.J.; Gerla, M. Mobility prediction and routing in ad hoc wireless networks. Int. J. Netw. Manag. 2001, 11, 3–30. [Google Scholar] [CrossRef]
- Zonoozi, M.M.; Dassanayake, P. User mobility modeling and characterization of mobility patterns. IEEE J. Sel. Areas Commun. 1997, 15, 1239–1252. [Google Scholar] [CrossRef]
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice Hall PTR: Hoboken, NJ, USA, 1996. [Google Scholar]
- Yan, C.; Fu, L.; Zhang, J.; Wang, J. A comprehensive survey on uav communication channel modeling. IEEE Access 2019, 7, 107769–107792. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal lap altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Li, S.; Ding, Q.; Wang, C. Research on reliability of ad hoc network communication in uavs formations. In Proceedings of the 2019 IEEE 6th International Symposium on Electromagnetic Compatibility (ISEMC), Barcelona, Spain, 2–6 September 2019. [Google Scholar]
- Zeng, Y.; Zhang, R. Energy-efficient uav communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile unmanned aerial vehicles (uavs) for energy-efficient internet of things communications. IEEE Trans. Wirel. Commun. 2017, 16, 7574–7589. [Google Scholar] [CrossRef]
- Leishman, J.G. Principles of Helicopter Aerodynamics with cd Extra; Cambridge University Press: Cambridge, UK, 2006; pp. 159–191. [Google Scholar]
- Yaliniz, R.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3-d placement of an aerial base station in next generation cellular networks. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016. [Google Scholar]
- Sun, Y.; Mi, Z.; Wang, H.; Lu, F.; Zhao, N. Adaptive enhanced weighted clustering algorithm for uav swarm. In Proceedings of the 2020 IEEE 20th International Conference on Communication Technology (ICCT), Nanning, China, 28–31 October 2020. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Weight | Altitude | Active Range |
|---|---|---|---|
| Very small | 2–5 lb | <1000 ft | 1–5 km |
| Small | 5–20 lb | 1000–5000 ft | 10–100 km |
| Medium | 100–1000 lb | 10,000–15,000 ft | 500–2000 km |
| Large | 10,000–30,000 lb | 20,000–40,000 ft | 1000–5000 km |
| Tactical/combat | 1000–20,000 lb | 10,000–30,000 ft | 500–2000 km |
| Notation | Value |
|---|---|
| The air fluid density /kg/m | 1.2 |
| UAV drag coefficient | 0.025 |
| Reference area of the UAV S/m | 0.192 |
| UAV rotor number M | 4 |
| UAV blade chord /m | 0.022 |
| The radius of the rotor spinning disk /m | 0.25 |
| The frame weight of UAV W/kg | 2 |
| The battery and payload weight of UAV w/kg | 2 |
| The gravity g/m/s | 9.8 |
| Ideal cluster size | 5 |
| The scale parameter | 0.5 |
| The shape parameter k | 1 |
| Signal receiving distance of UAV /m | 300 |
| UAV Number | DWCA-DCH | Single Cluster Head | Improvement |
|---|---|---|---|
| 20 | 0.8137 | 0.6797 | 19.7% |
| 50 | 0.8761 | 0.6751 | 29.8% |
| 80 | 0.8993 | 0.6728 | 33.7% |
| 110 | 0.9069 | 0.6702 | 35.3% |
| 140 | 0.9106 | 0.67 | 35.9% |
| 170 | 0.9107 | 0.670 | 36.0% |
| 200 | 0.9132 | 0.665 | 37.3% |
| 300 | 0.9129 | 0.6614 | 38.0% |
| 400 | 0.9109 | 0.6604 | 37.9% |
| 500 | 0.9106 | 0.6578 | 38.4% |
| 600 | 0.911 | 0.6596 | 38.1% |
| 700 | 0.9062 | 0.6555 | 38.3% |
| 800 | 0.903 | 0.6533 | 38.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Hu, Z.; Wang, Z.; Wen, X.; Lu, Z. Survivability Analysis of Unmanned Aerial Vehicle Network based on Dynamic Weighted Clustering Algorithm with Dual Cluster Heads. Electronics 2023, 12, 1743. https://doi.org/10.3390/electronics12071743
Zhang Y, Hu Z, Wang Z, Wen X, Lu Z. Survivability Analysis of Unmanned Aerial Vehicle Network based on Dynamic Weighted Clustering Algorithm with Dual Cluster Heads. Electronics. 2023; 12(7):1743. https://doi.org/10.3390/electronics12071743
Chicago/Turabian StyleZhang, Yujing, Zhiqun Hu, Zhifei Wang, Xiangming Wen, and Zhaoming Lu. 2023. "Survivability Analysis of Unmanned Aerial Vehicle Network based on Dynamic Weighted Clustering Algorithm with Dual Cluster Heads" Electronics 12, no. 7: 1743. https://doi.org/10.3390/electronics12071743