
DNCL: Hybrid DOA Estimation and NMDS Cooperative Multi-Target Localization for RFID

Abstract
:1. Introduction
- (1)
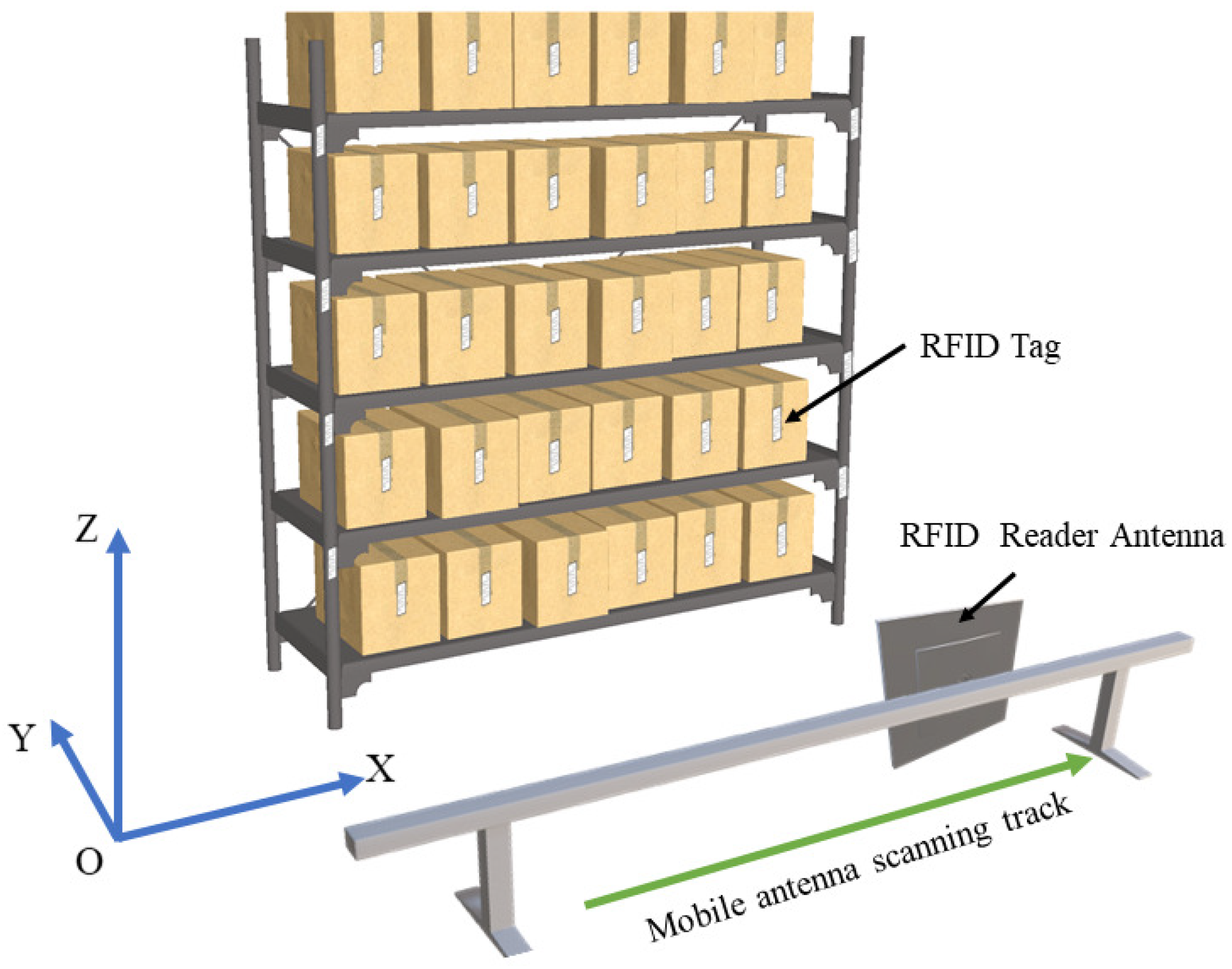
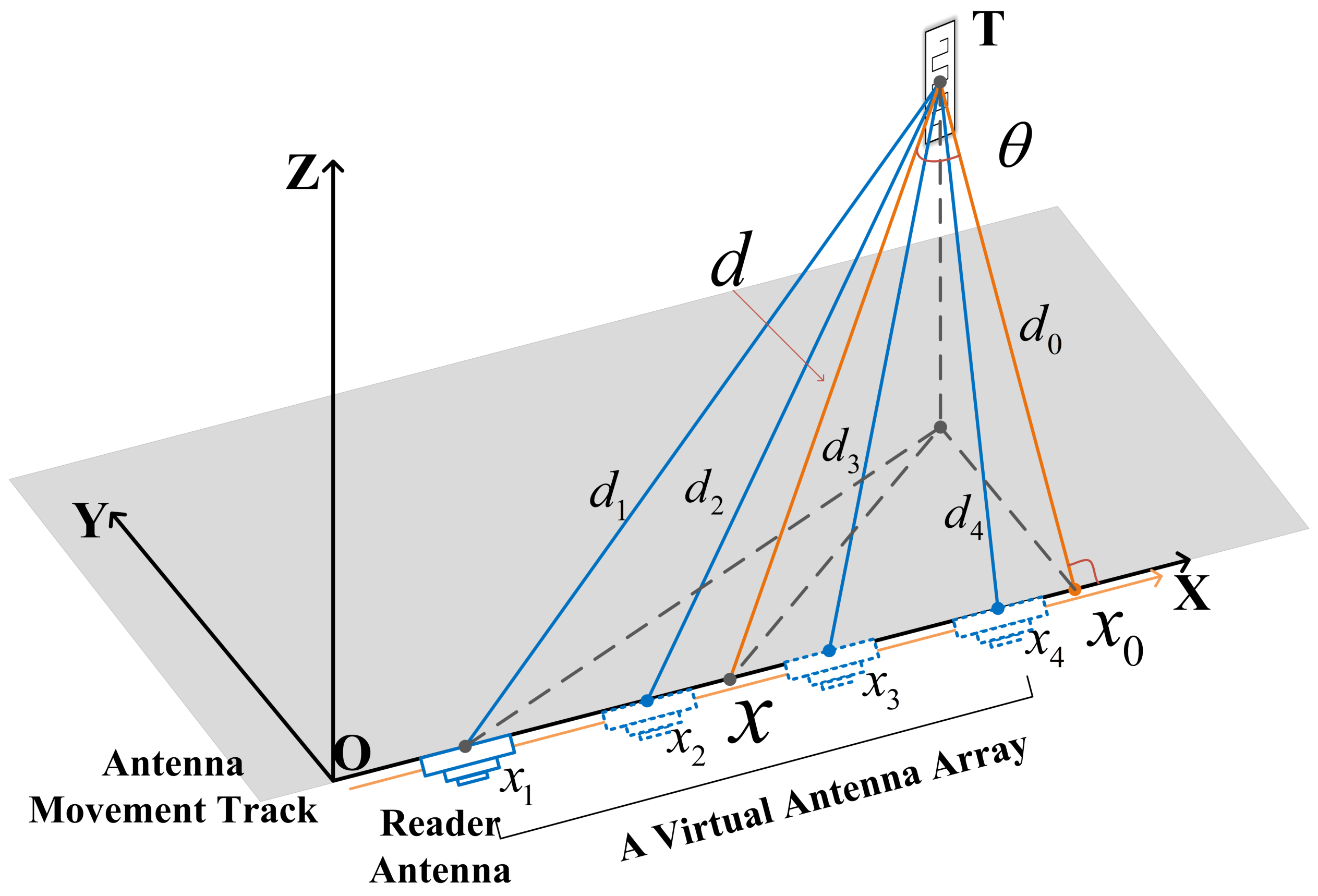
- Since different hardware characteristics of different antennas will introduce different phase errors in phase measurement, which are difficult to determine but hard to ignore, this paper is inspired by the principle idea of synthetic aperture radar and designs a phase correction method based on antenna moving scan to build a virtual antenna array, which can effectively eliminate the phase shift errors caused by hardware.
- (2)
- We propose a Toeplitz rank recovery method for the DOA estimation parameters RFID localization method, for the problem of the direction of arrival estimation rank deficit caused by a large number of coherent multipath signal interference in the environment, we use the Toeplitz method to rank recover the signal covariance matrix, which can effectively eliminate the direction of arrival estimation error caused by multipath signal interference.
- (3)
- This paper constructs a DOA parameter linear model, combines the localization geometry model to obtain the characteristics of each tag, further introduces a non-metric multidimensional scaling algorithm, uses the distance characteristic relationship between tag pairs to construct a phase dissimilarity matrix, and completes the target location estimation by coordinates conversion with reference tag coordinates to achieve high-precision and highly robust RFID multi-target localization.
- (4)
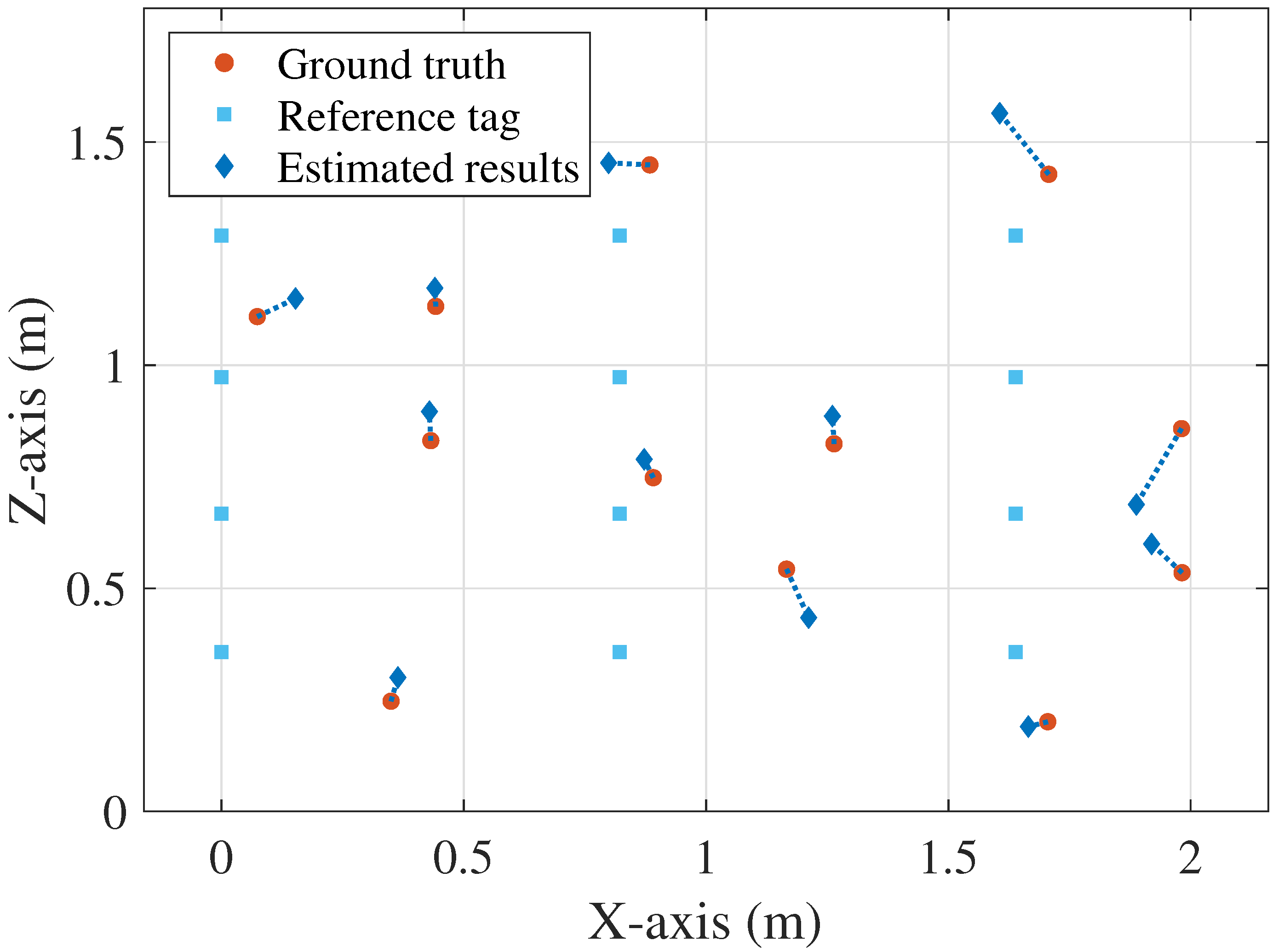
- This paper implements a prototype passive RFID positioning system using COTS RFID devices and conducts several experiments in typical indoor scenarios to evaluate the actual performance of the proposed localization algorithm and compare it with other methods. The experimental results show that the proposed localization method can achieve high accuracy and robust spatial localization, and the median error of DNCL method in free space reaches 2 cm.
2. Background
2.1. RFID Phase Model
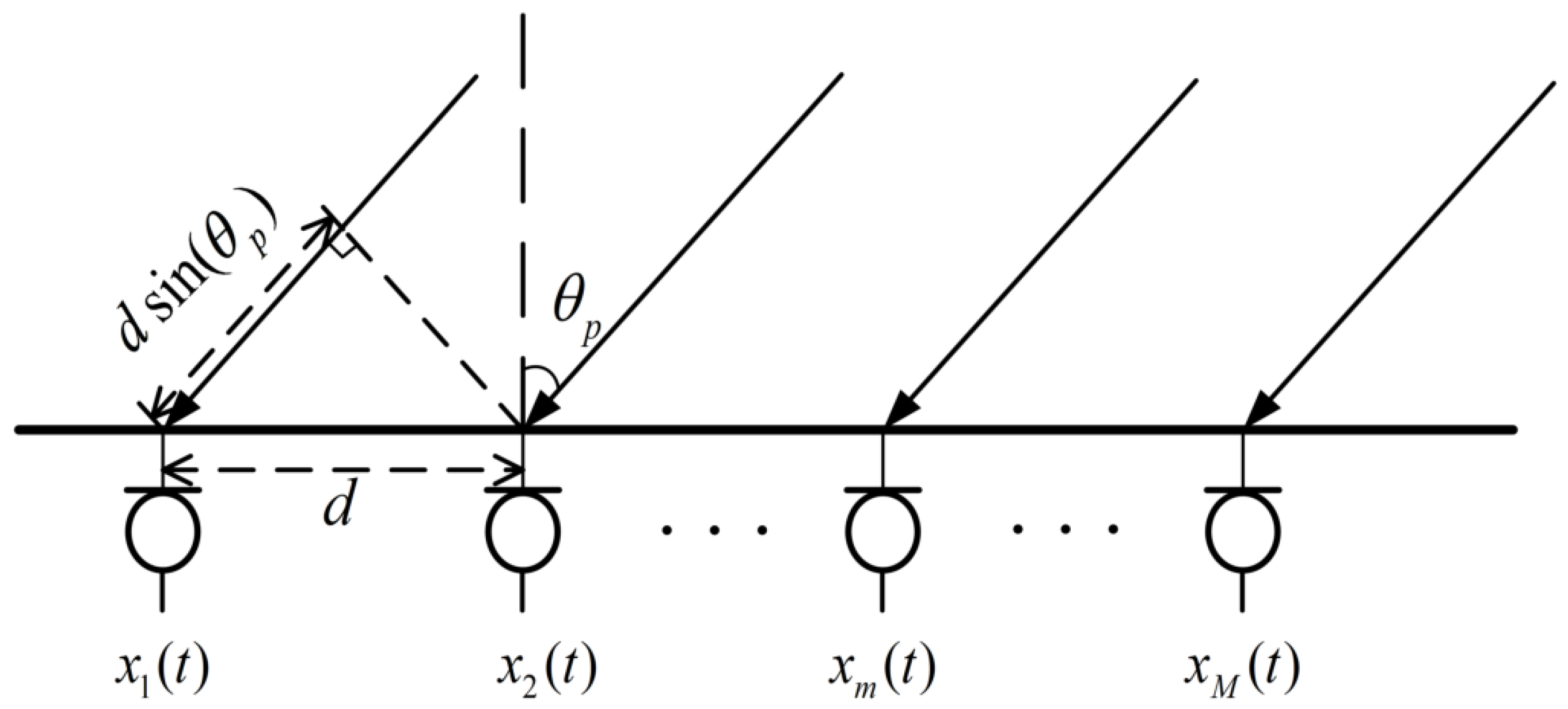
2.2. Direction of Arrival
2.3. Nonmetric Multidimensional Scaling (NMDS)
- Select the initial coordinates of the position in the target tags space. The initial coordinates could be assigned at random or calculated with classical MDS. Set the threshold for , the maximum number of times to iterate and the initialized number of iteration times .
- After performing k iterations, the Euclidean distance for each node pair was calculated based on the obtained relative coordinates.
- The pool-adjacent violators (PAV) algorithm was used to generate the rank value matrix based on the phase dissimilarity matrix , ensuring that they satisfy the weak monotonicity relation.
- The number of iterations plus 1, update the relative coordinates of the nodeswhere M represents the number of tags. We used a = 0.2 based on Kruskal [40].
- Use the updated to calculate the value of .
- If or , stop the iteration, or execute step (3).
3. Modeling the Cooperative Localization
4. System Design
4.1. System Overview
4.2. Virtual Antenna Array Direction of Arrival Estimation
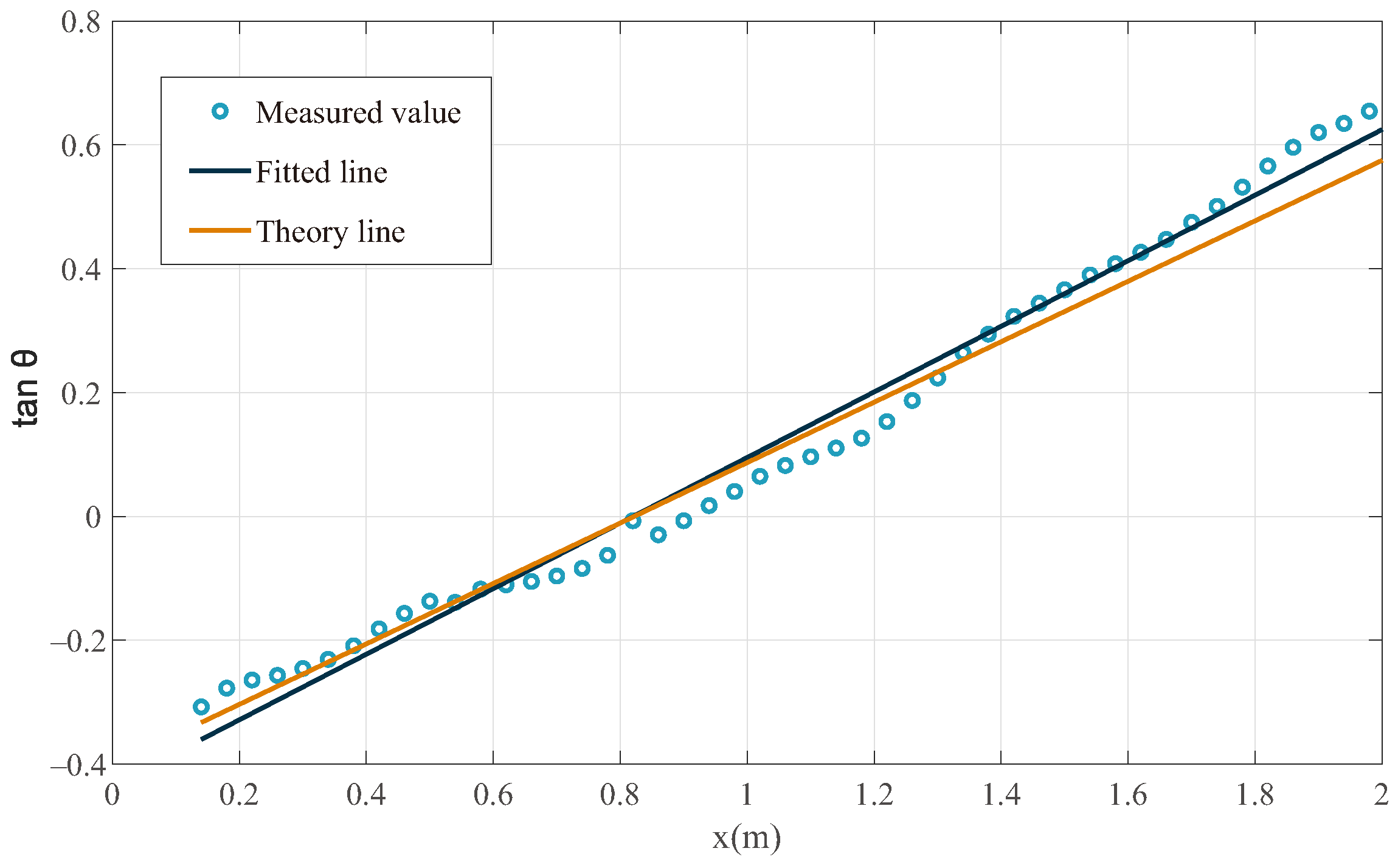
4.3. DOA Parameters Profile
4.4. NMDS-Based Cooperative Algorithm
5. Experiment and Result Analysis
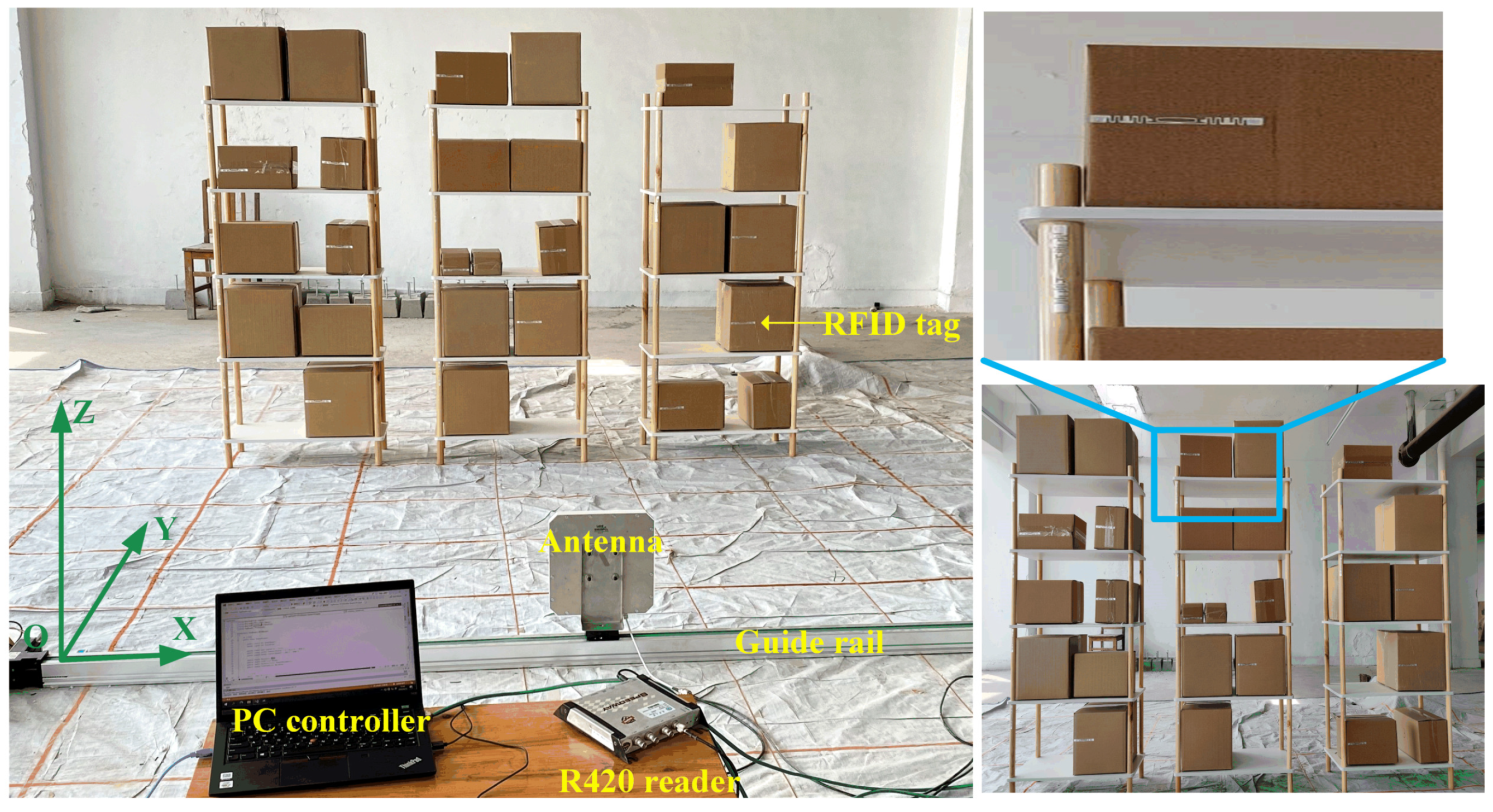
5.1. Experimental Setup
5.1.1. Implementation
5.1.2. System Setup
5.1.3. Metrics
5.2. Key Parameters Selection
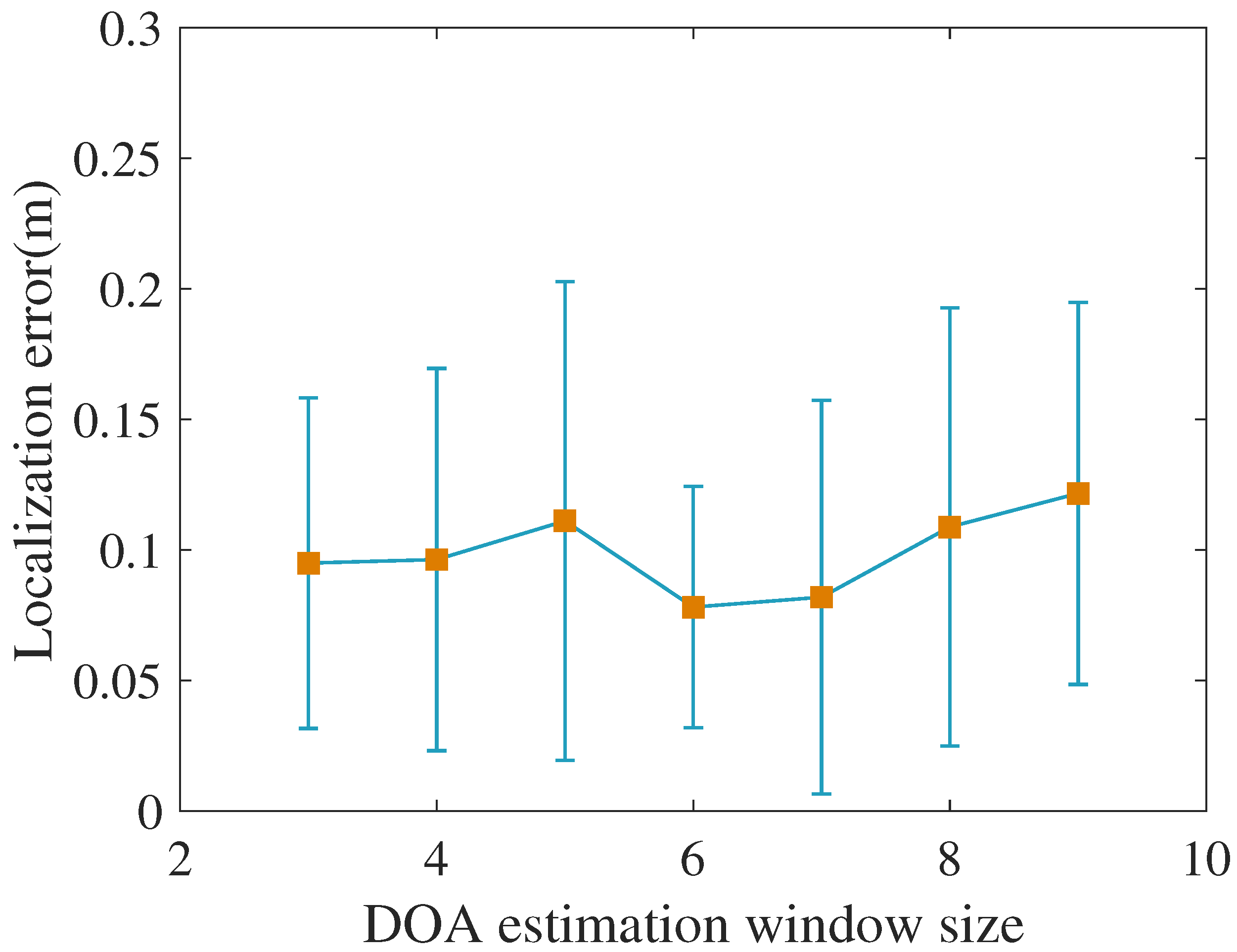
5.2.1. DOA Estimation Window Size
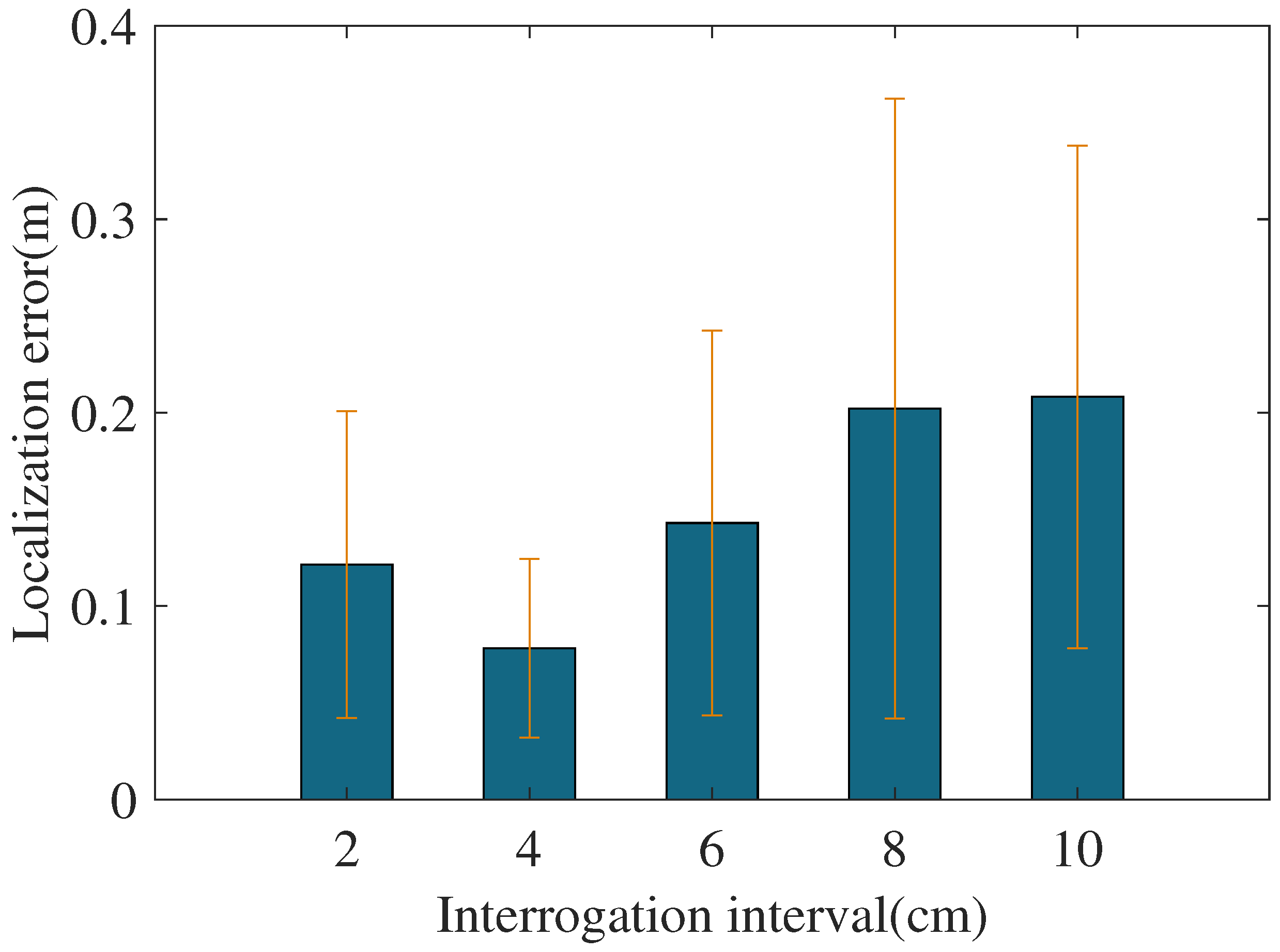
5.2.2. Interrogation Interval
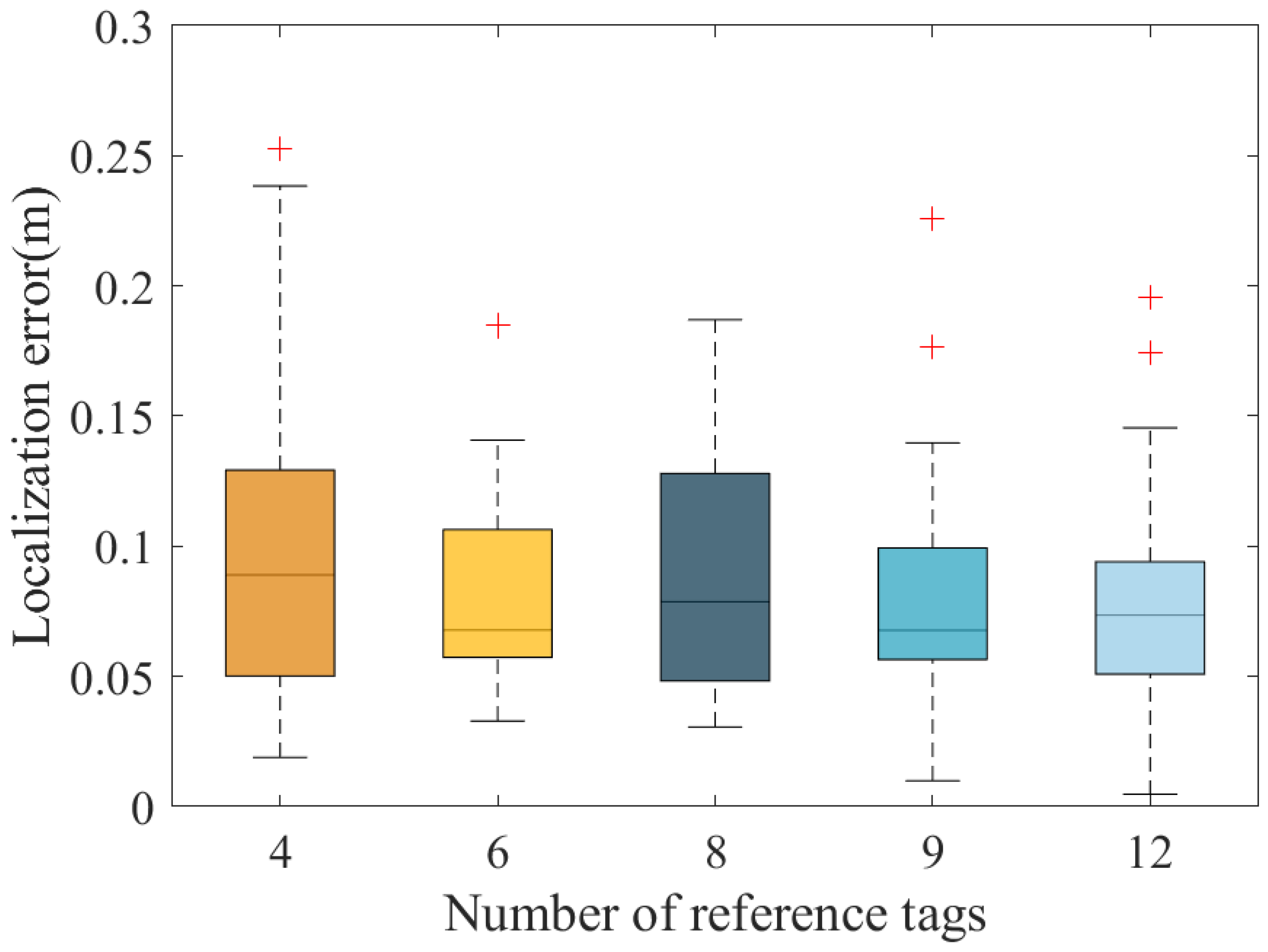
5.2.3. Number of Reference Tags
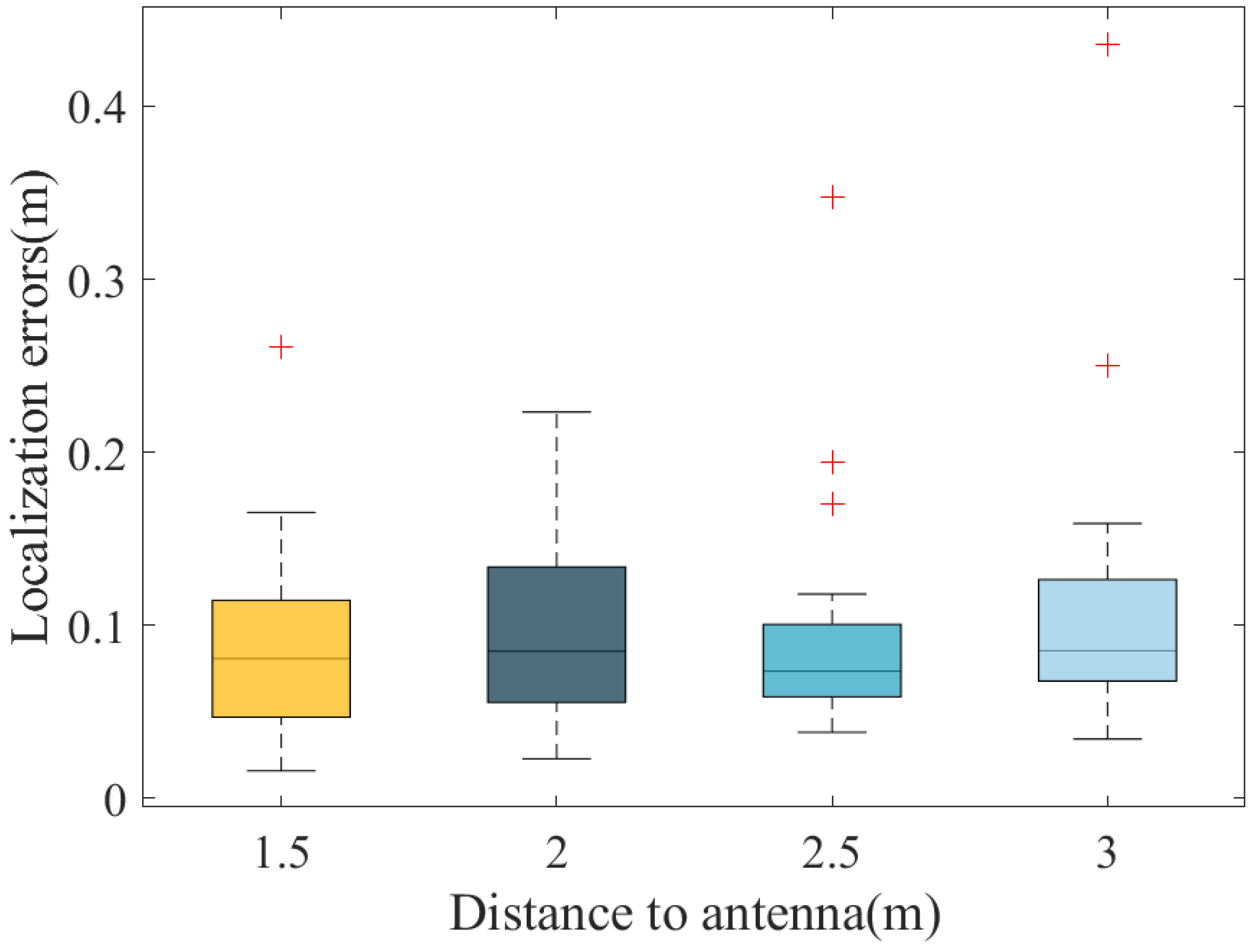
5.2.4. Reader Distance to Shelves
5.3. Evaluation
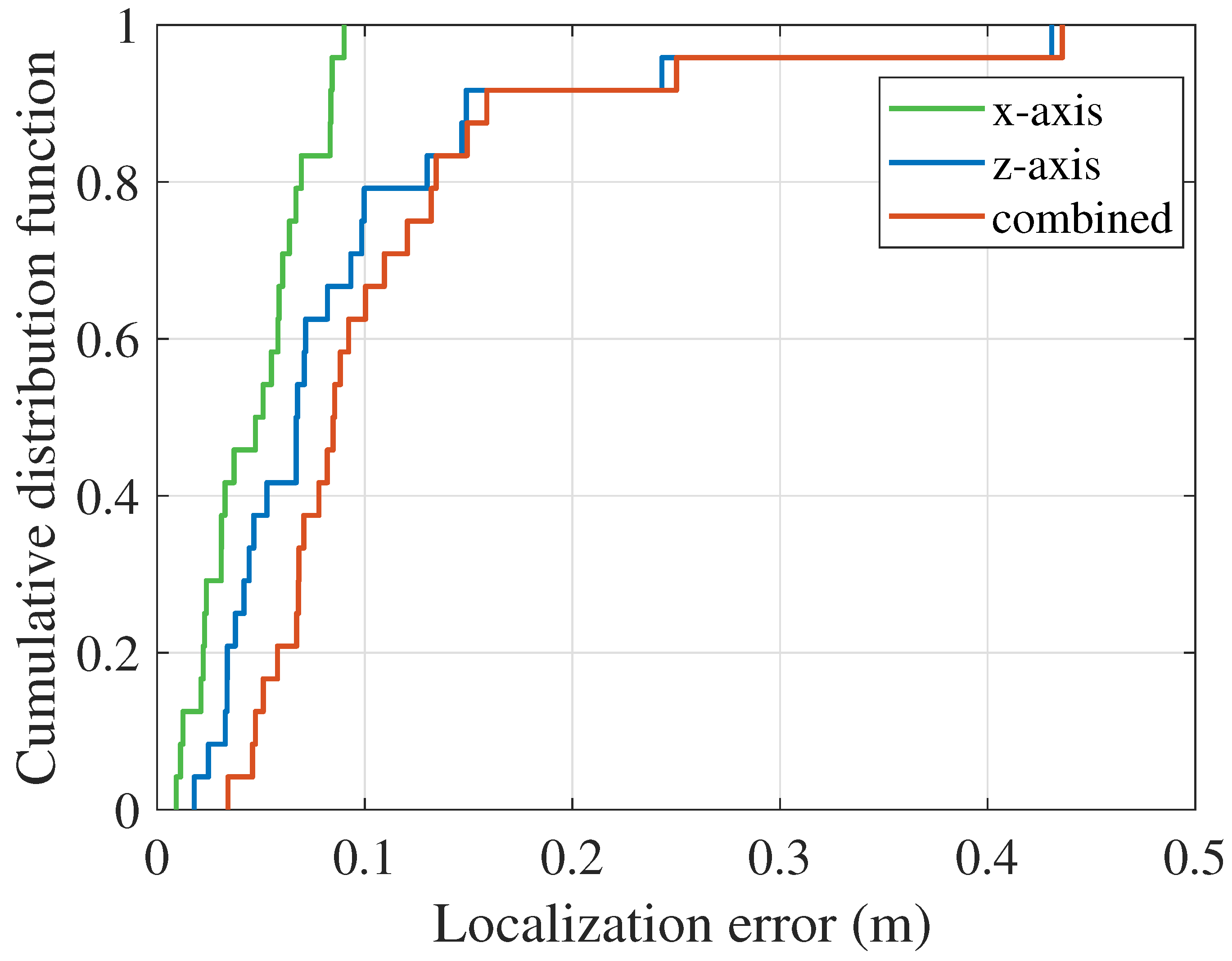
5.3.1. Method Performance
5.3.2. Comparison with Other Algorithms
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; Mccullough, F.; Mouzakitis, A. A Survey of the State-of-the-Art Localization Techniques and Their Potentials for Autonomous Vehicle Applications. IEEE Internet Things J. 2018, 5, 829–846. [Google Scholar] [CrossRef]
- Altaf, S.; Haroon, M.; Ahmad, S.; Nasr, E.A.; Zaindin, M.; Huda, S. Radio-Frequency-Identification-Based 3D Human Pose Estimation Using Knowledge-Level Technique. Electronics 2023, 12, 374. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Kunhoth, J.; Karkar, A.; Al-Maadeed, S.; Al-Ali, A. Indoor positioning and wayfinding systems: A survey. Hum.-Centric Comput. Inf. Sci. 2020, 10, 1–41. [Google Scholar] [CrossRef]
- Xiong, J.; Jamieson, K. ArrayTrack: A Fine-Grained Indoor Location System. In Proceedings of the Proceedings USENIX Symposium on Networked Systems Design and Implementation (NSDI), Lombard, IL, USA, 2–5 April 2013; pp. 71–84. [Google Scholar]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. Spotfi: Decimeter level localization using wifi. In Proceedings of the Proceedings ACM Conference Special Interest Group Data Commun, (SIGCOMM), London, UK, 17–21 August 2015; pp. 269–282. [Google Scholar]
- Luo, Y.; Law, C.L. Indoor Positioning Using UWB-IR Signals in the Presence of Dense Multipath with Path Overlapping. IEEE Trans. Wirel. Commun. 2012, 11, 3734–3743. [Google Scholar] [CrossRef]
- Tiemann, J.; Wietfeld, C. Scalable and precise multi-UAV indoor navigation using TDOA-based UWB localization. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Li, C.; Mo, L.; Zhang, D. Review on UHF RFID Localization Methods. IEEE J. Radio Freq. Identif. 2019, 3, 205–215. [Google Scholar] [CrossRef]
- Jiang, Y.; Ma, Y.; Liu, H.; Zhang, Y. RF-SML: A SAR-based multi-granular and real-time localization method for RFID tags. Electronics 2020, 9, 1447. [Google Scholar] [CrossRef]
- Costanzo, A.; Masotti, D.; Ussmueller, T.; Weigel, R. Tag, You’re It: Ranging and Finding via RFID Technology. IEEE Microw. Mag. 2013, 14, 36–46. [Google Scholar] [CrossRef]
- Arthaber, H.; Faseth, T.; Galler, F. Spread-Spectrum Based Ranging of Passive UHF EPC RFID Tags. IEEE Commun. Lett. 2015, 19, 1734–1737. [Google Scholar] [CrossRef]
- Ussmueller, T.; Brenk, D.; Essel, J.; Heidrich, J.; Fischer, G.; Weigel, R. Roundtrip-Time-of-Flight based localization of passive multi-standard RFID-tags. In Proceedings of the 2012 IEEE International Conference on Wireless Information Technology and Systems (ICWITS), Maui, Hawaii, 11–16 November 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Ni, L.; Liu, Y.; Lau, Y.C.; Patil, A. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, (PerCom), Fort Worth, TX, USA, 23–26 March 2003; pp. 407–415. [Google Scholar] [CrossRef]
- Zhang, J.; Lyu, Y.; Patton, J.; Periaswamy, S.C.G.; Roppel, T. BFVP: A Probabilistic UHF RFID Tag Localization Algorithm Using Bayesian Filter and a Variable Power RFID Model. IEEE Trans. Ind. Electron. 2018, 65, 8250–8259. [Google Scholar] [CrossRef]
- Shangguan, L.; Li, Z.; Yang, Z.; Li, M.; Liu, Y.; Han, J. OTrack: Towards Order Tracking for Tags in Mobile RFID Systems. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 2114–2125. [Google Scholar] [CrossRef]
- Ruan, W.; Yao, L.; Sheng, Q.Z.; Falkner, N.J.; Li, X. Tagtrack: Device-free localization and tracking using passive rfid tags. In Proceedings of the 11th Annual International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services, London, UK, 2–5 December 2014; pp. 80–89. [Google Scholar]
- Ur Rehman, S.; Liu, R.; Zhang, H.; Liang, G.; Fu, Y.; Qayoom, A. Localization of moving objects based on RFID tag array and laser ranging information. Electronics 2019, 8, 887. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Vasisht, D.; Katabi, D. RF-IDraw: Virtual Touch Screen in the Air Using RF Signals. In Proceedings of the ACM Special Interest Group on Data Communication (SIGCOMM), SIGCOMM’14, New York, NY, USA, 10–14 September 2014; pp. 235–246. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Xiong, J.; Jiang, H.; Chen, X.; Fang, D. D-Watch: Embracing “Bad” Multipaths for Device-Free Localization with COTS RFID Devices. IEEE/ACM Trans. Netw. 2017, 25, 3559–3572. [Google Scholar] [CrossRef]
- Yang, L.; Chen, Y.; Li, X.Y.; Xiao, C.; Li, M.; Liu, Y. Tagoram: Real-time tracking of mobile RFID tags to high precision using COTS devices. In Proceedings of the Annu Int Conf Mobile Comput Networking (MobiCom), Maui, HI, USA, 7–11 September 2014; pp. 237–248. [Google Scholar]
- Liu, T.; Liu, Y.; Yang, L.; Guo, Y.; Wang, C. BackPos: High Accuracy Backscatter Positioning System. IEEE Trans. Mob. Comput. 2016, 15, 586–598. [Google Scholar] [CrossRef]
- Ma, Y.; Fu, Y.; Liang, X.; Liu, H.; Chen, K. An Efficient Method for Hyperbolic-Based Localization in SAR RFID Systems. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Nafi, K.W.; Gong, W.; Nayak, A. MuSLoc: Circular Array Based Indoor Localization with COTS APs. In Proceedings of the IEEE Int. Instrum. Meas. Technol. Conf. (I2MTC), Auckland, New Zealand, 20–23 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Azzouzi, S.; Cremer, M.; Dettmar, U.; Kronberger, R.; Knie, T. New measurement results for the localization of UHF RFID transponders using an Angle of Arrival (AoA) approach. In Proceedings of the 2011 IEEE International Conference on RFID, Orlando, FL, USA, 12–14 April 2011; pp. 91–97. [Google Scholar] [CrossRef]
- Alvarez-Narciandi, G.; Laviada, J.; Pino, M.R.; Las-Heras, F. Attitude Estimation Based on Arrays of Passive RFID Tags. IEEE Trans. Antennas Propag. 2018, 66, 2534–2544. [Google Scholar] [CrossRef]
- Cremer, M.; Dettmar, U.; Hudasch, C.; Kronberger, R.; Lerche, R.; Pervez, A. Localization of Passive UHF RFID Tags Using the AoAct Transmitter Beamforming Technique. IEEE Sens. J. 2016, 16, 1762–1771. [Google Scholar] [CrossRef]
- Duan, C.; Yang, L.; Lin, Q.; Liu, Y. Tagspin: High Accuracy Spatial Calibration of RFID Antennas via Spinning Tags. IEEE Trans. Mob. Comput. 2018, 17, 2438–2451. [Google Scholar] [CrossRef]
- Buffi, A.; Motroni, A.; Nepa, P.; Tellini, B.; Cioni, R. A SAR-Based Measurement Method for Passive-Tag Positioning with a Flying UHF-RFID Reader. IEEE Trans. Instrum. Meas. 2019, 68, 845–853. [Google Scholar] [CrossRef]
- Tripicchio, P.; Unetti, M.; D’Avella, S.; Buffi, A.; Motroni, A.; Bernardini, F.; Nepa, P. A Synthetic Aperture UHF RFID Localization Method by Phase Unwrapping and Hyperbolic Intersection. IEEE Trans. Autom. Sci. Eng. 2022, 19, 933–945. [Google Scholar] [CrossRef]
- Bernardini, F.; Buffi, A.; Fontanelli, D.; Macii, D.; Magnago, V.; Marracci, M.; Motroni, A.; Nepa, P.; Tellini, B. Robot-Based Indoor Positioning of UHF-RFID Tags: The SAR Method with Multiple Trajectories. IEEE Trans. Instrum. Meas. 2021, 70, 1–15. [Google Scholar] [CrossRef]
- Miesen, R.; Kirsch, F.; Vossiek, M. UHF RFID Localization Based on Synthetic Apertures. IEEE Trans. Autom. Sci. Eng. 2013, 10, 807–815. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, L.; Bu, Y.; Wang, Y.; Wu, J.; Lu, S. 3-Dimensional Localization via RFID Tag Array. In Proceedings of the IEEE International Conference on Mobile Ad Hoc and Sensor Systems, (MASS), Orlando, FL, USA, 22–25 October 2017; pp. 353–361. [Google Scholar] [CrossRef]
- Bu, Y.; Xie, L.; Gong, Y.; Liu, J.; He, B.; Cao, J.; Ye, B.; Lu, S. RF-3DScan: RFID-based 3D Reconstruction on Tagged Packages. IEEE Trans. Mob. Comput. 2021, 20, 722–738. [Google Scholar] [CrossRef]
- Li, C.; Tanghe, E.; Plets, D.; Suanet, P.; Hoebeke, J.; De Poorter, E.; Joseph, W. ReLoc: Hybrid RSSI- and Phase-Based Relative UHF-RFID Tag Localization with COTS Devices. IEEE Trans. Instrum. Meas. 2020, 69, 8613–8627. [Google Scholar] [CrossRef]
- Wang, J.; Katabi, D. Dude, Where’s My Card? RFID Positioning That Works with Multipath and Non-Line of Sight. In Proceedings of the ACM SIGCOMM 2013 Conference on SIGCOMM, Hong Kong, China, 12–16 August 2013; pp. 51–62. [Google Scholar] [CrossRef]
- Gao, Z.; Ma, Y.; Liu, K.; Miao, X.; Zhao, Y. An Indoor Multi-Tag Cooperative Localization Algorithm Based on NMDS for RFID. IEEE Sens. J. 2017, 17, 2120–2128. [Google Scholar] [CrossRef]
- Shang, Y.; Rumi, W.; Zhang, Y.; Fromherz, M. Localization from connectivity in sensor networks. IEEE Trans. Parallel Distrib. Syst. 2004, 15, 961–974. [Google Scholar] [CrossRef] [Green Version]
- Vivekanandan, V.; Wong, V.W. Ordinal MDS-Based Localization for Wireless Sensor Networks. In Proceedings of the IEEE Vehicular Technology Conference, Melbourne, Australia, 7–10 May 2006; pp. 1–5. [Google Scholar] [CrossRef]
- Cheung, K.; So, H. A multidimensional scaling framework for mobile location using time-of-arrival measurements. IEEE Trans. Signal Process. 2005, 53, 460–470. [Google Scholar] [CrossRef] [Green Version]
- Stojmenovic, I. Handbook of Sensor Networks: Algorithms and Architectures; John Wiley & Sons: Hoboken, NJ, USA, 2005; Volume 49. [Google Scholar]
- Buffi, A.; Nepa, P.; Lombardini, F. A Phase-Based Technique for Localization of UHF-RFID Tags Moving on a Conveyor Belt: Performance Analysis and Test-Case Measurements. IEEE Sens. J. 2015, 15, 387–396. [Google Scholar] [CrossRef]
- Shangguan, L.; Yang, Z.; Liu, A.X.; Zhou, Z.; Liu, Y. STPP: Spatial-Temporal Phase Profiling-Based Method for Relative RFID Tag Localization. IEEE/ACM Trans. Netw. 2017, 25, 596–609. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Localization Scheme | Number of Antennas | Information | Method | System Setting | Distance between Antennas and Tags | Localization Accuracy |
|---|---|---|---|---|---|---|
| SARFID [42] | two antennas | phase | Hologram-based | coordinate system | 1.95 m | 6.3 cm(X-axis) |
| STPP [43] | one antenna | phase | Proximity-based | ∖ | 0.3 m | below 6 cm(X-axis) |
| Tagoram [21] | four antennas | phase | Hologram-based | coordinate system | ∖ | 6.35 cm(X-axis) |
| ReLoc [35] | two antennas | phase & RSSI | Proximity-based | tilted angle & distance | 1.2 m | 7 cm(X-axis), 93.8%(level ordering) |
| HyLoc [23] | one antenna | phase | Hyperbolic-based | coordinate system | 0.5 m | 5.43 cm(X-axis) |
| DNCL (our proposal) | one antenna | phase | DOA-based | coordinate system | 2.5 m | 4.73 cm(X-axis), 6.76 cm(Z-axis), 8.47 cm(combined) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Ma, Y.; Tian, C.; Su, D.; Yang, B. DNCL: Hybrid DOA Estimation and NMDS Cooperative Multi-Target Localization for RFID. Electronics 2023, 12, 1742. https://doi.org/10.3390/electronics12071742
Li Y, Ma Y, Tian C, Su D, Yang B. DNCL: Hybrid DOA Estimation and NMDS Cooperative Multi-Target Localization for RFID. Electronics. 2023; 12(7):1742. https://doi.org/10.3390/electronics12071742
Chicago/Turabian StyleLi, Yuting, Yongtao Ma, Chenglong Tian, Dianfei Su, and Bo Yang. 2023. "DNCL: Hybrid DOA Estimation and NMDS Cooperative Multi-Target Localization for RFID" Electronics 12, no. 7: 1742. https://doi.org/10.3390/electronics12071742