
The Design of Intelligent Building Lighting Control System Based on CNN in Embedded Microprocessor
Abstract
:1. Introduction
2. The Background and Related Work
2.1. Background
2.1.1. Embedded System
2.1.2. CNN
2.2. The Related Work
2.2.1. The Development of Building Lighting Control Methods
2.2.2. Manual Control
2.2.3. Automatic Control
2.2.4. Modeling Recognition Technology
2.2.5. Deep Learning Technology
3. Design Details of the Embedded Lighting Control System
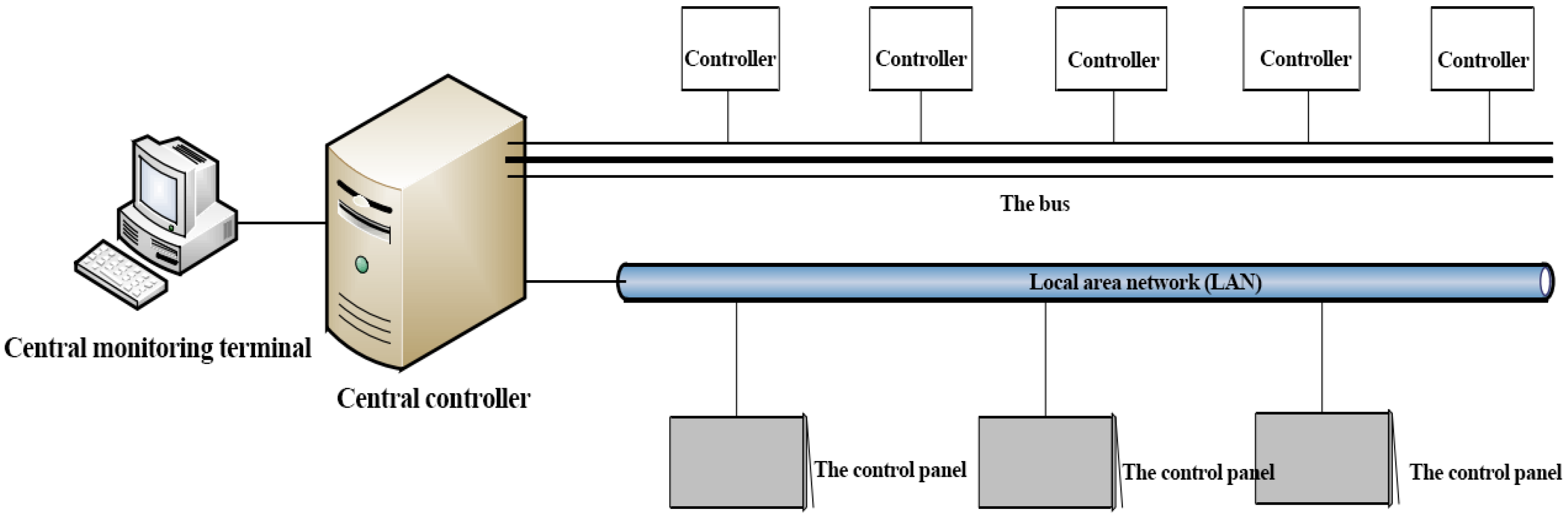
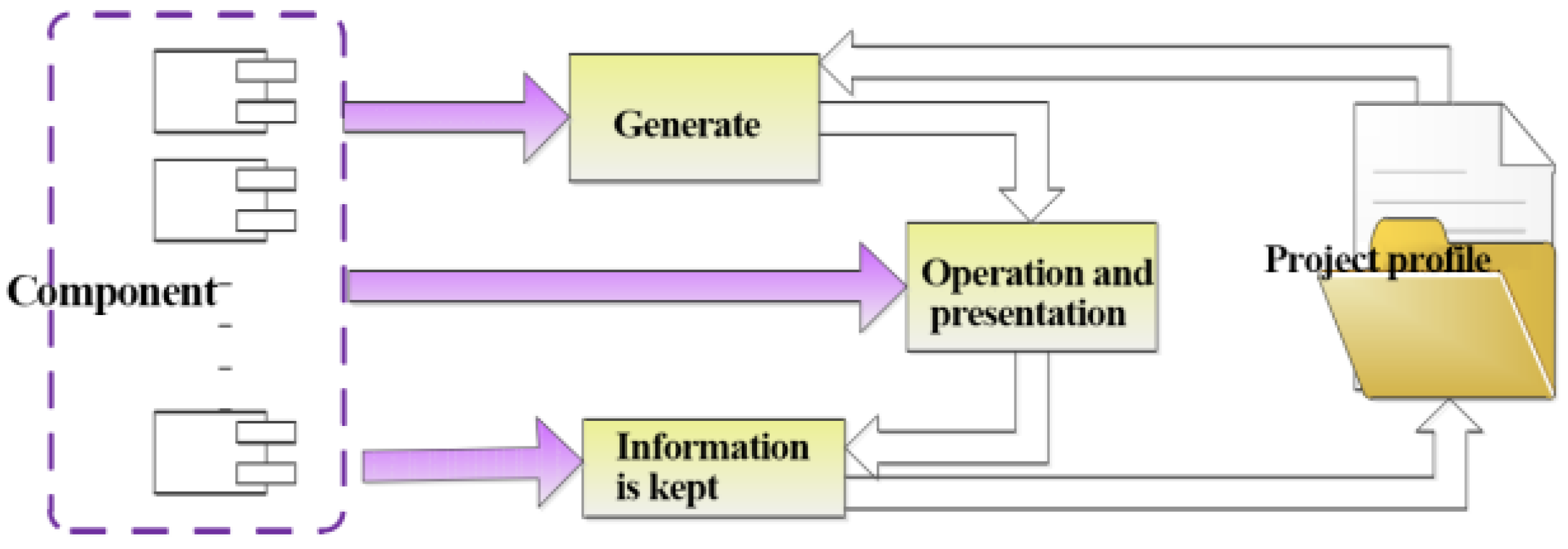
3.1. Basic Lighting Control Structure
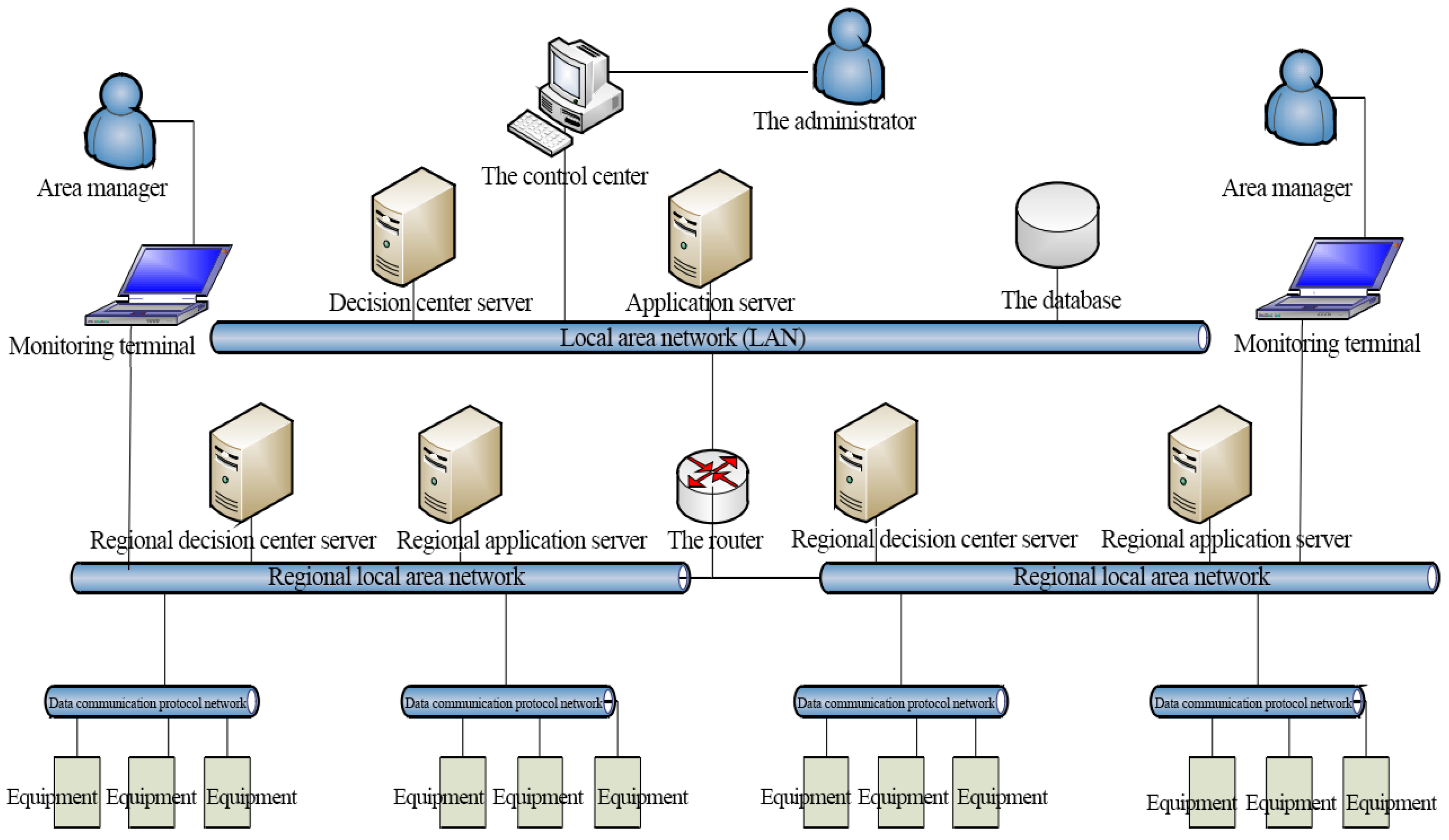
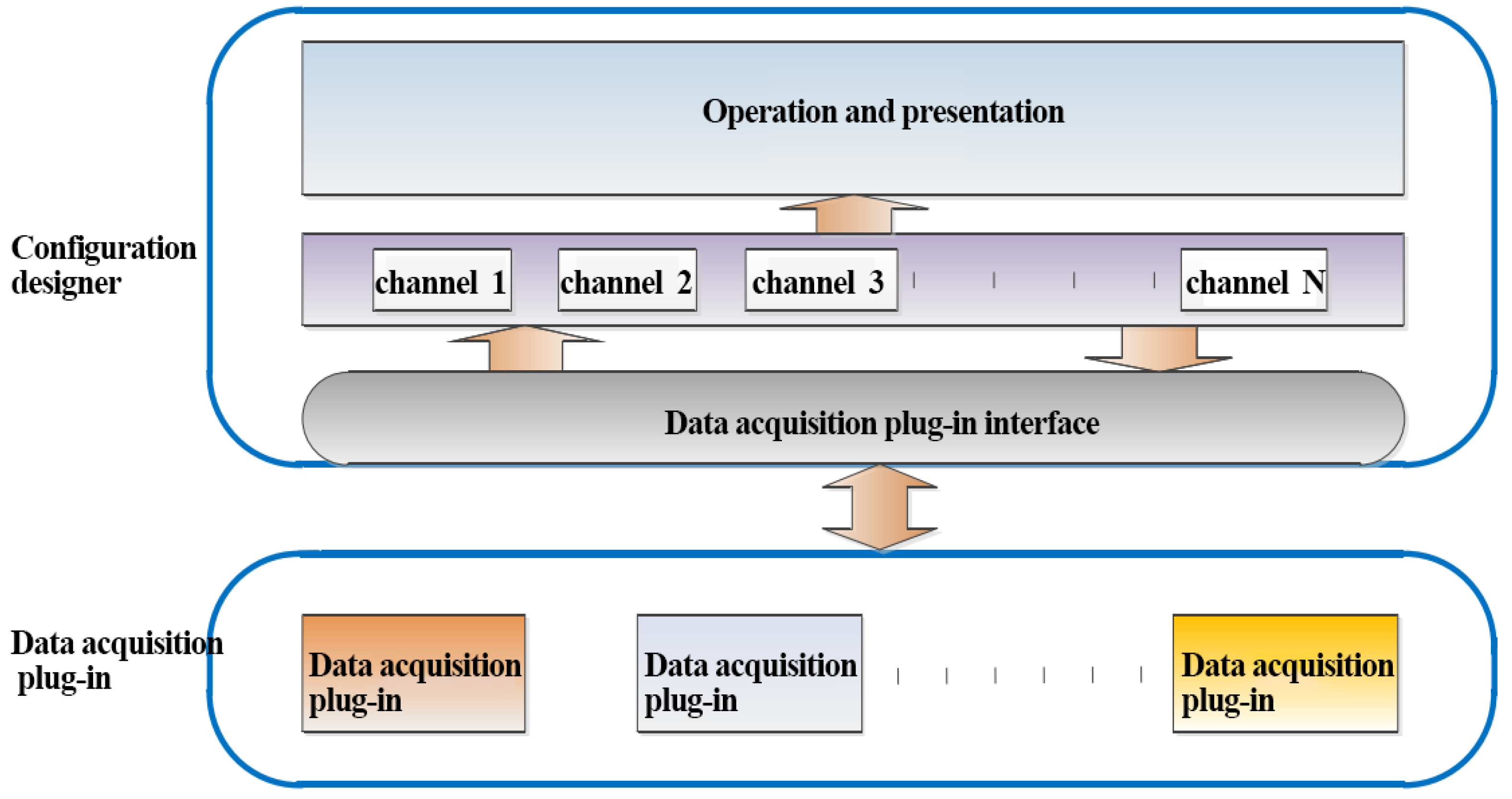
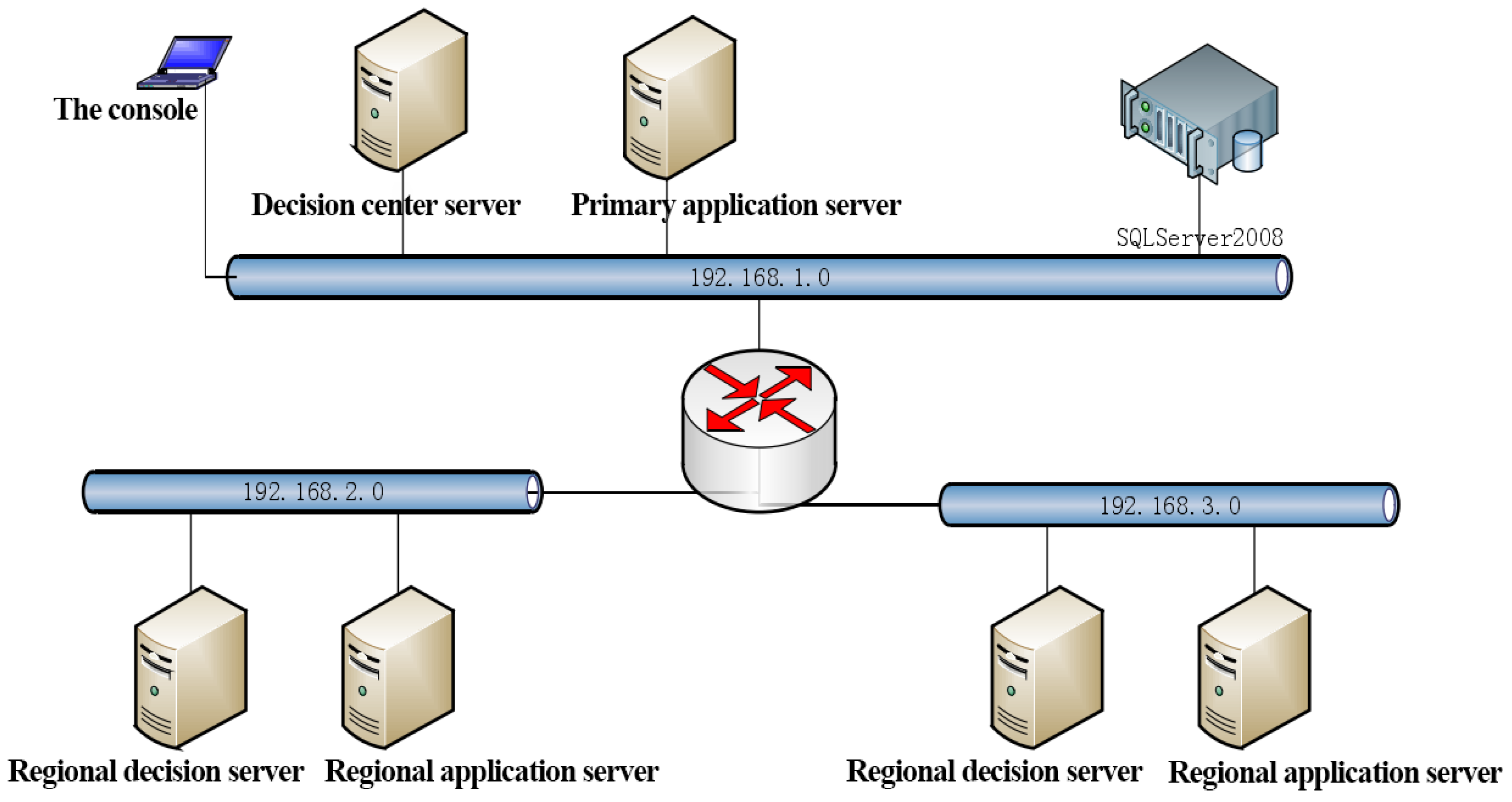
3.2. The Model of Distributed System
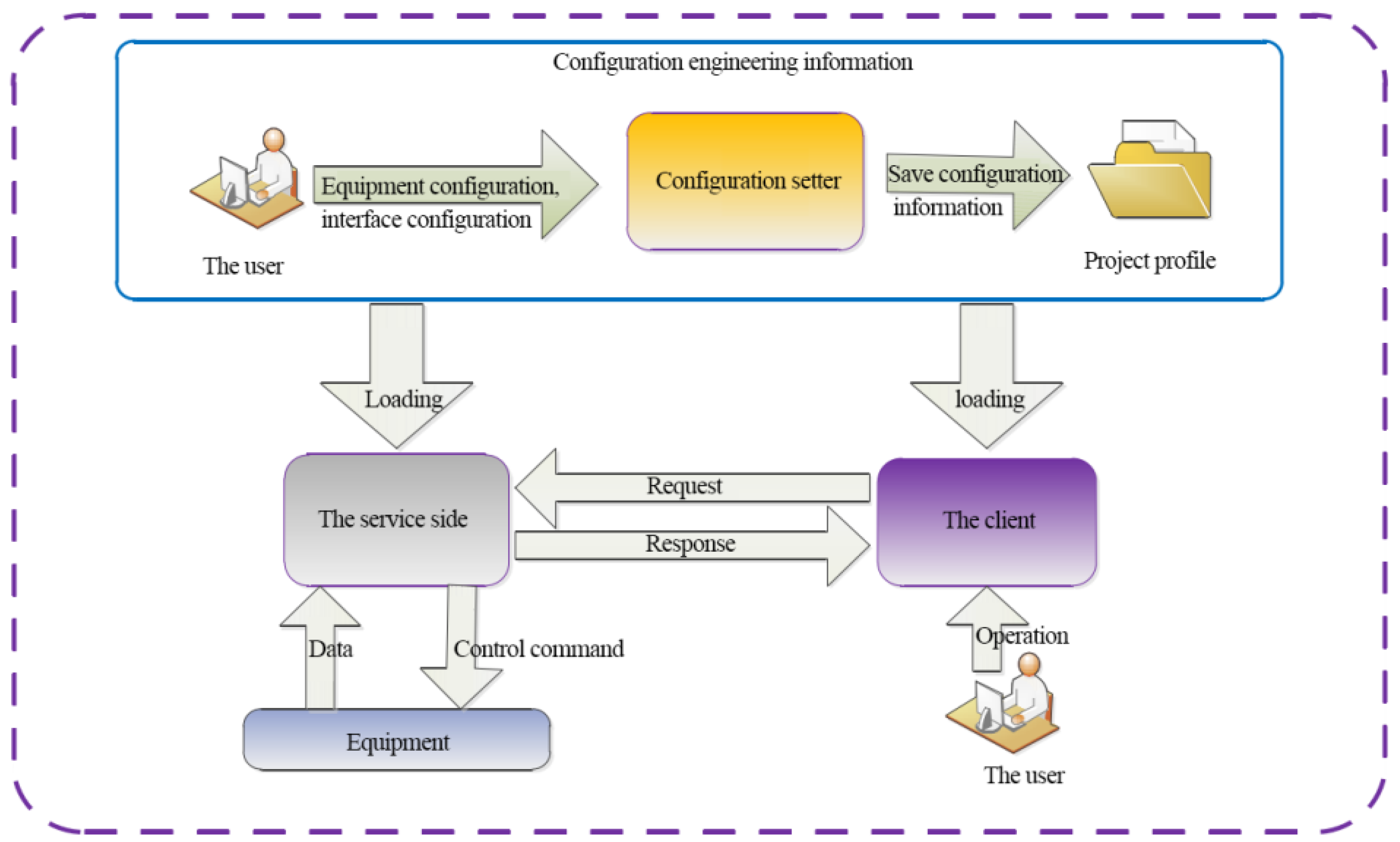
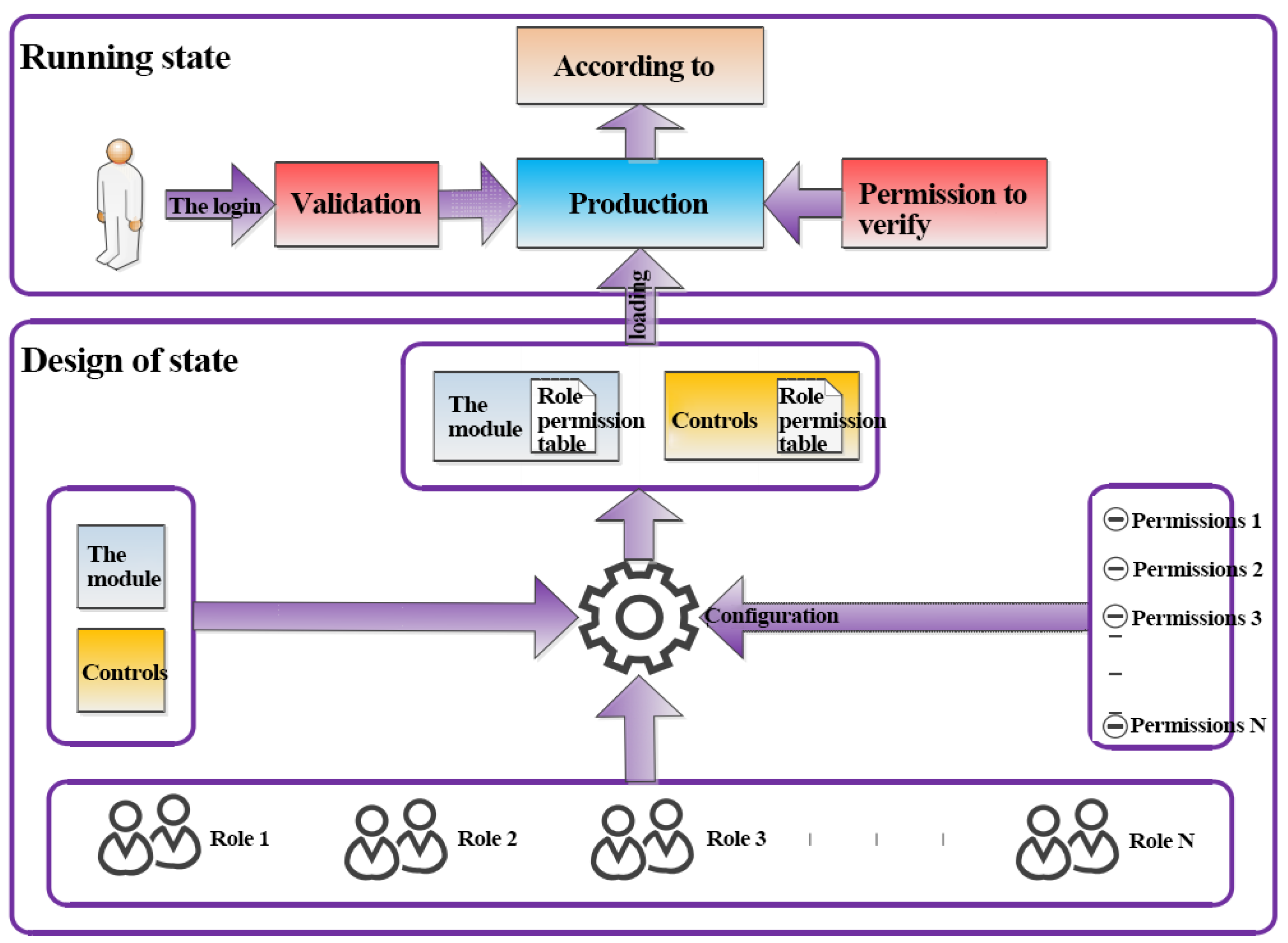
3.3. Basic Working Principle
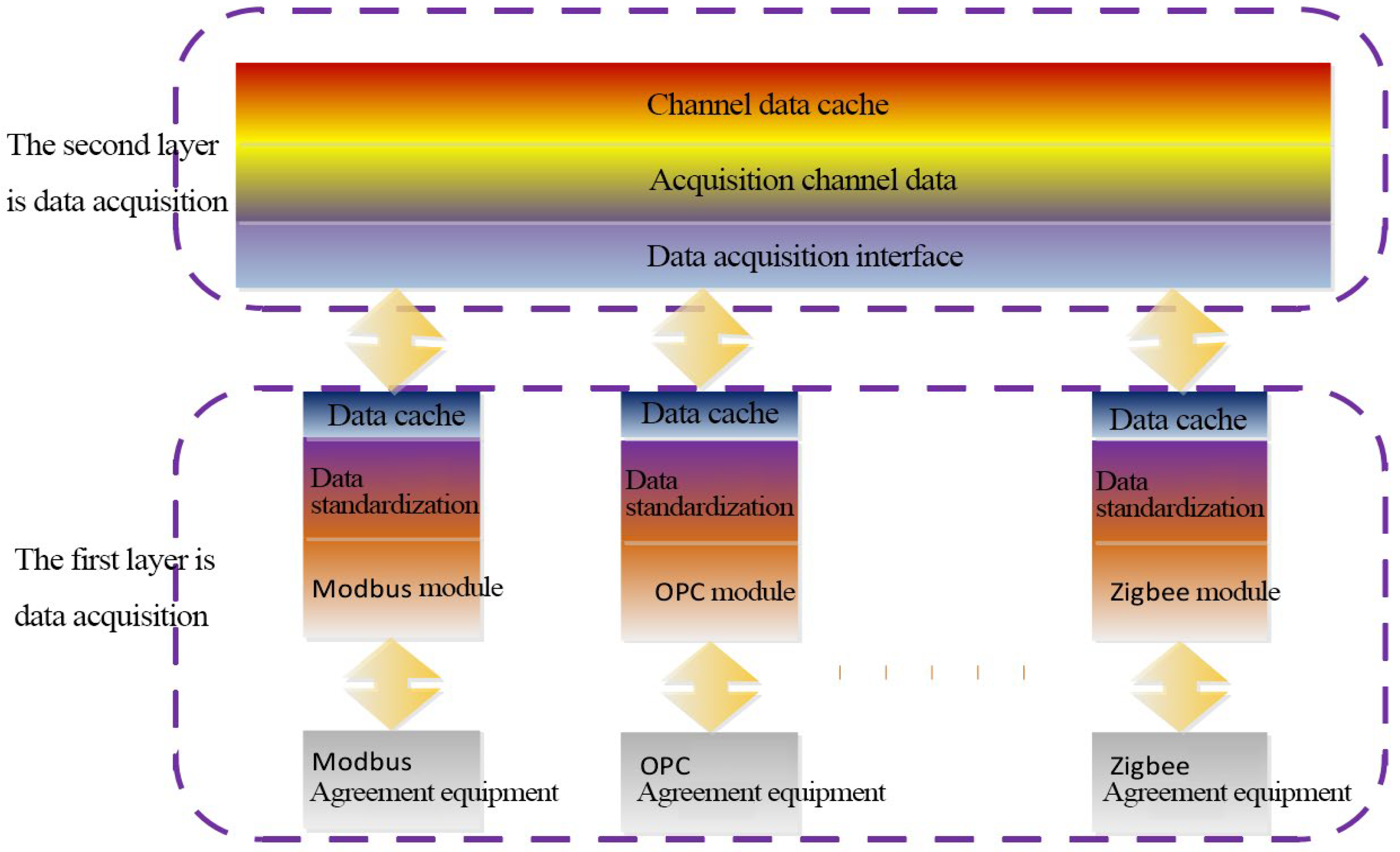
3.4. The Process of the System
4. Application of Artificial Intelligence Technology in Intelligent Building Lighting Control
4.1. The Pre-Processing Steps
4.2. Convolutional Neural Network
5. Design and Implementation of CNN-Based Building Lighting Control System
5.1. System Structure Design
5.2. System Communication Protocol Design

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Command Type | Project Number | Area Number | Channel Number | Control Commands |
|---|---|---|---|---|
| 2 byte | 5 bytes | 5 bytes | 5 bytes | 17 bytes |
| Command | Command Name | Description |
|---|---|---|
| 0 × 0 | SavData | Save the data in the database |
| 0 × 1 | Inserte | Insert data into the database |
| 0 × 2 | Delet | Delete data to the database |
| 0 × 3 | GetFroDataBase | Get data into the database |
| 0 × 4 | Modfer | Modify data to the database |
| 0 × 5 | RealTme | Show real-time data |
| 0 × 6 | Removee | Do not display real-time data |
| 0 × 7 | ChannlInfo | Channel data information |
| 0 × 8 | CkepLive | Notification packet |
| 0 × 9 | CMDInfoe | Client command control |
| 0 × A | GetRalData | Get instant data |
| 0 × B | Alarmnfo | Alarm data information |
| 0 × C | AlaremOFF | Alarm system closed |
| 0 × D | UseerLogin | User login |
| Command Type | Data |
|---|---|
| lbyte | Length |
| 0 × 4 | Data |
| Command Type | Data |
|---|---|
| lbyte | Length |
| 0 × 8 | Data |
| Command Type | Data |
|---|---|
| lbyte | Length |
| 0 × D | Data |
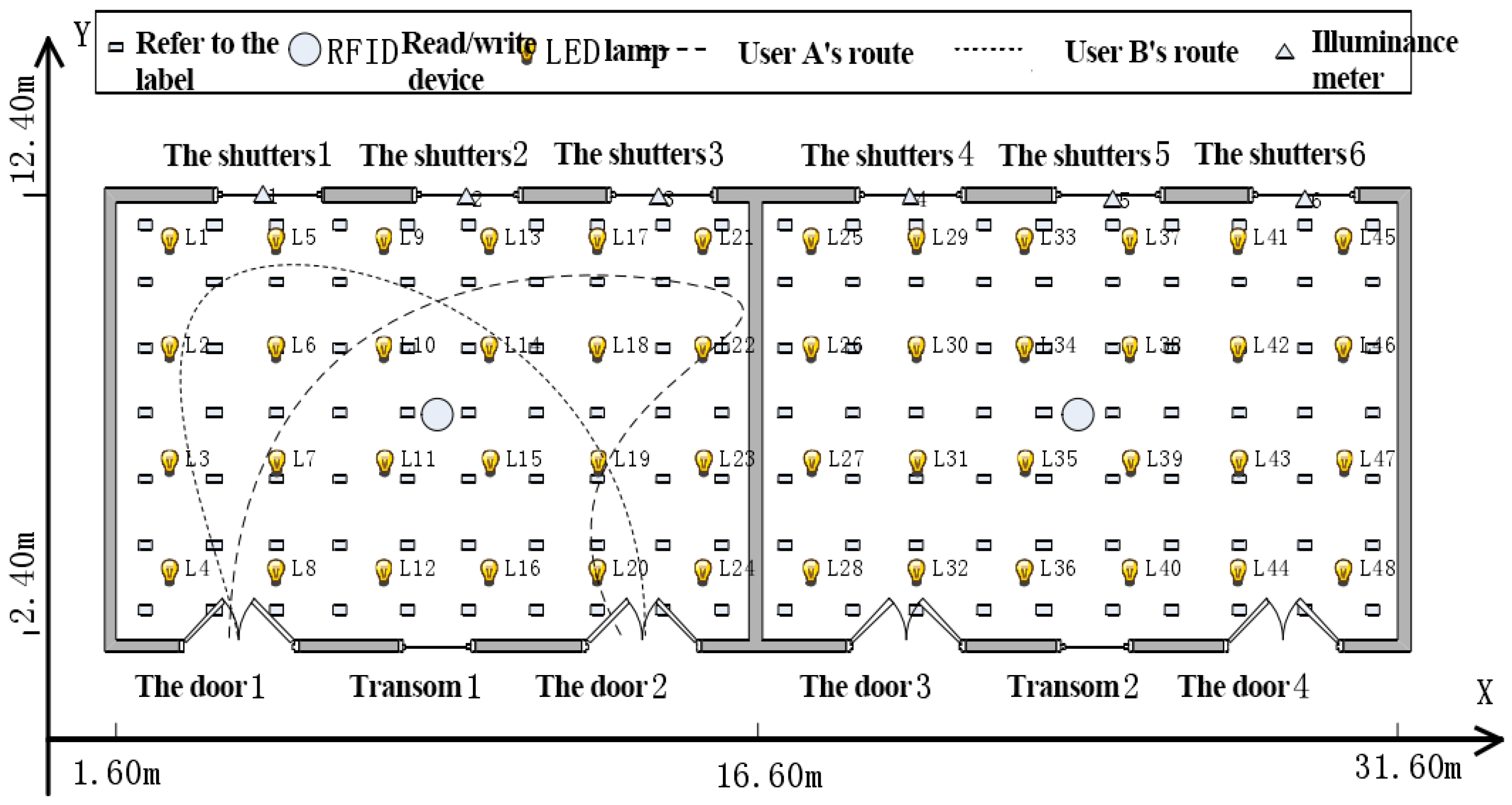
5.3. Equipment Selection and System Layout
5.4. The Implementation of the Experiment
6. The Analysis and Discussion
6.1. About the Accuracy of the Recognition
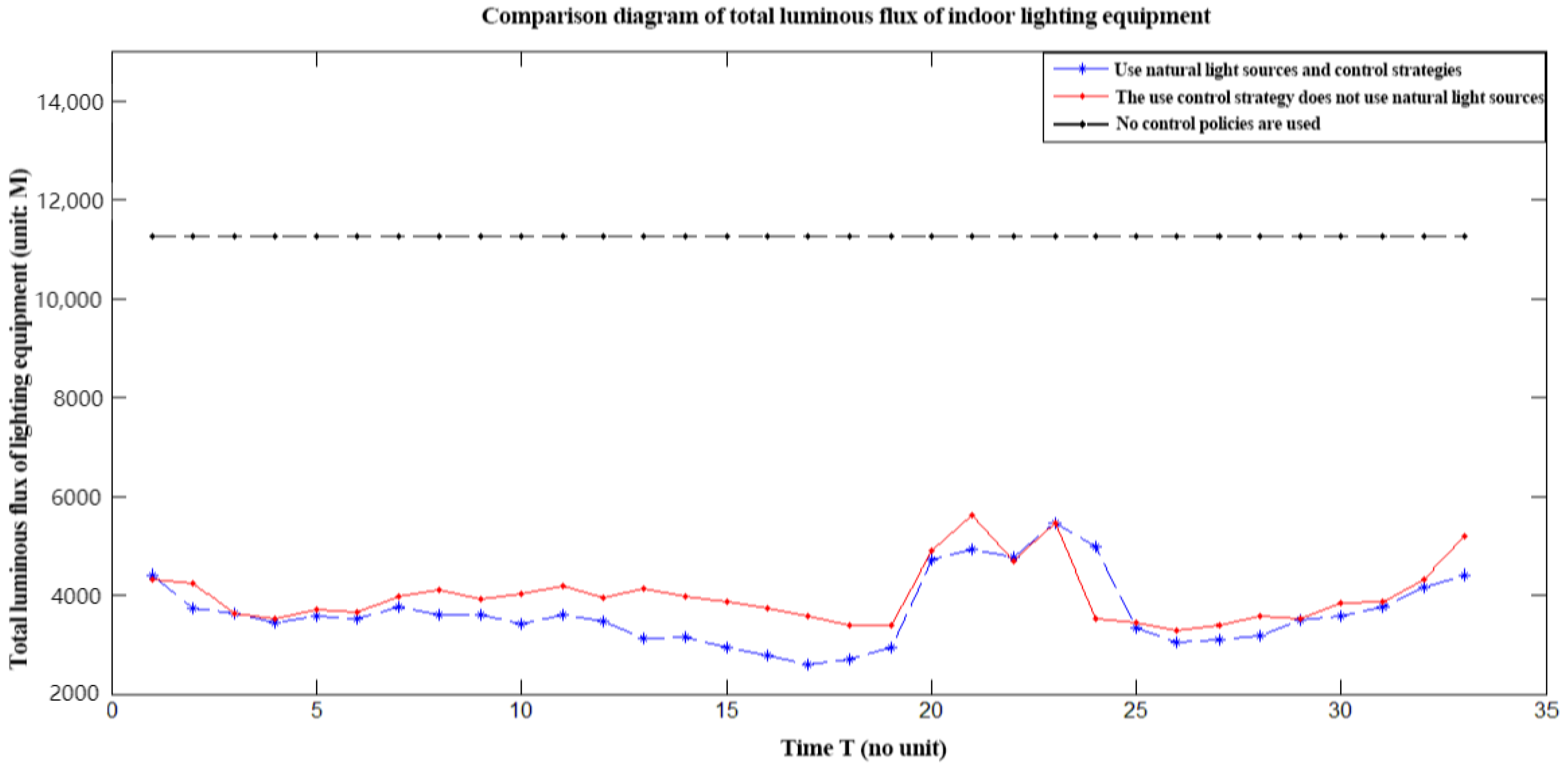
6.2. About the Energy Saving
7. Conclusions
7.1. The Summary of the Design Work
7.2. The Performance of the Experiment
7.3. The Shortcomings of the Research
7.4. The Perspectives for Future Work
- The design and experiment desired more research, as more data is needed to prove and develop them.
- More comparative research should be conducted with various building lighting control methods, including manual, automatic intelligent and pure manual methods.
- Further research and experiments can be considered regarding the following aspects:
- (1)
- In constructing a convolutional neural network, a slightly more complex network model could be chosen, and the lightweight and operation efficiency of the software system should be considered so that the system’s recognition and anti-interference abilities can be further improved.
- (2)
- In order to improve the reliability of image sensing, multi-camera and mutual verification methods are suggested to evaluate multiple detection results in the overlapping area of the long-distance field of vision more comprehensively for the distributed detection from one point to many points.
- (3)
- In order to ensure the recognition accuracy of an image in the presence of a large occlusion of human activities, the image processing module can be used to reduce a certain degree of information processing in future research work.
- (4)
- As there is not much low-level development mentioned for the industrial embedded microprocessor, more effort should be made to optimize the operating system to realize the transplantation of the software system for current mainstream industrial development.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Leira, F.; Johansen, T.; Fossen, T. Automatic detection, classification and tracking of objects in the ocean surface from UAVs using a thermal camera. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–10. [Google Scholar]
- Tiwari, M.; Singhai, R. A review of detection and tracking of object from image and video sequences. Int. J. Comput. Intell. Res. 2017, 13, 745–765. [Google Scholar]
- Wang, Y.; Luo, X.; Fu, S.; Hu, S. Context multi-task visual object tracking via guided filter. Signal Process. Image Commun. 2018, 62, 117–128. [Google Scholar] [CrossRef]
- Dehghan, A.; Shah, M. Binary quadratic programing for online tracking of hundreds of people in extremely crowded scenes. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 568–581. [Google Scholar] [CrossRef] [PubMed]
- Sahbani, B.; Adiprawita, W. Kalman filter and iterative-hungarian algorithm implementation for low complexity point tracking as part of fast multiple object tracking system. In Proceedings of the 2016 6th International Conference on System Engineering and Technology (ICSET), Bandung, Indonesia, 3–4 October 2016; pp. 109–115. [Google Scholar]
- Medina-Quero, J.; Shewell, C.; Cleland, I.; Rafferty, J.; Nugent, C.; Estévez, M.E. Computer vision-based gait velocity from non-obtrusive thermal vision sensors. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Athens, Greece, 19–23 March 2018; pp. 391–396. [Google Scholar]
- Zeng, M.; Nguyen, L.T.; Yu, B.; Mengshoel, O.J.; Zhu, J.; Wu, P.; Zhang, J. Convolutional neural networks for human activity recognition using mobile sensors. In Proceedings of the 2014 6th International Conference on Mobile Computing, Applications and Services (MobiCASE), Austin, TX, USA, 6–7 November 2014; pp. 197–205. [Google Scholar]
- Ordóñez, F.; Roggen, D. Deep convolutional and lstm recurrent neural networks for multimodal wearable activity recognition. Sensors 2016, 16, 115. [Google Scholar] [CrossRef] [PubMed]
- Albelwi, S.; Mahmood, A. A framework for designing the architectures of deep convolutional neural networks. Entropy 2017, 19, 242. [Google Scholar] [CrossRef]
- Gao, Z. Object-Based Image Classification and Retrieval with Deep Feature Representations. Ph.D. Thesis, School of Computing and Information Technology, University of Wollongong, New South Wales, Australia, 2018; pp. 724–735. [Google Scholar]
- Teow, M.T. Understanding convolutional neural networks using a minimal model for handwritten digit recognition. In Proceedings of the 2017 IEEE 2nd International Conference on Automatic Control and Intelligent Systems (I2CACIS), Kota Kinabalu, Malaysia, 21 October 2017; pp. 167–172. [Google Scholar]
- Kristan, M.; Matas, J.; Leonardis, A.; Vojir, T.; Pflugfelder, R.; Fernandez, G.; Nebehay, G.; Porikli, F.; Cehovin, L. A novel performance evaluation methodology for single-target trackers. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2137–2155. [Google Scholar] [CrossRef] [PubMed]
- Mishkin, D.; Sergievskiy, N.; Matas, J. Systematic evaluation of convolution neural network advances on the imagenet. Comput. Vis. Image Underst. 2017, 161, 11–19. [Google Scholar] [CrossRef]
- Manohar, V.; Soundararajan, P.; Raju, H.; Goldgof, D.; Kasturi, R.; Garofolo, J. Performance evaluation of object detection and tracking in video. In Asian Conference on Computer Vision; Springer: Berlin, Heidelberg, 2006; pp. 151–161. [Google Scholar]
- Gade, R.; Moeslund, T. Thermal tracking of sports players. Sensors 2014, 14, 13679–13691. [Google Scholar] [CrossRef] [PubMed]
- Bernardin, K.; Stiefelhagen, R. Evaluating multiple object tracking performance: The clear mot metrics. EURASIP J. Image Video Process. 2008, 2008, 246309. [Google Scholar] [CrossRef]
- Bochinski, E.; Eiselein, V.; Sikora, T. High-speed tracking-by-detection without using image information. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar]
- Wan, X.; Wang, J.; Zhou, S. An online and flexible multi-object tracking framework using long short-term memory. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 1230–1238. [Google Scholar]
- Bewley, A.; Ge, Z.; Ott, L.; Ramos, F.; Upcroft, B. Simple online and realtime tracking. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3464–3468. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M. Object tracking benchmark. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1834–1848. [Google Scholar] [CrossRef] [PubMed]
- Čehovin, L.; Kristan, M.; Leonardis, A. Is my new tracker really better than yours? In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Steamboat Springs, CO, USA, 24–26 March 2014; pp. 540–547. [Google Scholar]
- Čehovin, L.; Leonardis, A.; Kristan, M. Visual object tracking performance measures revisited. IEEE Trans. Image Process. 2016, 25, 1261–1274. [Google Scholar] [PubMed]
- Wang, Q.; Gong, D.; Qi, M.; Shen, Y.; Lei, Y. Temporal sparse feature auto-combination deep network for video action recognition. Concurr. Comput. Pract. Exp. 2018, 30, e4487. [Google Scholar] [CrossRef]
- Jiang, X.; Xiao, Z.; Zhang, B.; Zhen, X.; Cao, X.; Doermann, D.; Shao, L. Crowd counting and density estimation by trellis encoder-decoder networks. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 6126–6135. [Google Scholar]
- Chen, X.; Lai, J. Detecting abnormal crowd behaviors based on the div-curl characteristics of flow fields. Pattern Recognit. 2019, 88, 342–355. [Google Scholar] [CrossRef]
- Wei, X.; Du, J.; Xue, Z.; Liang, M.; Geng, Y.; Xu, X.; Lee, J. A very deep two-stream network for crowd type recognition. Neurocomputing 2019, 396, 106–112. [Google Scholar] [CrossRef]
- Vahora, S.; Chauhan, N. Deep neural network model for group activity recognition using contextual relationship. Eng. Sci. Technol. Int. J. 2019, 22, 47–54. [Google Scholar] [CrossRef]
- Jing, S.; Chen, C.; Kang, X.K. Slicing convolutional neural network for crowd video understanding. In Proceedings of the IEEE Conf Comput Vis Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 5620–5628. [Google Scholar]













| Buf [1] | Buf [2] | Buf [3] | Buf [4] | Buf [Lenth] | Buf [2] |
|---|---|---|---|---|---|
| Data header | Control type | Area number | Device IP | Data symbol | End instruction |
| lbyte | lbyte | lbyte | lbyte | lengthbytes | lbyte |
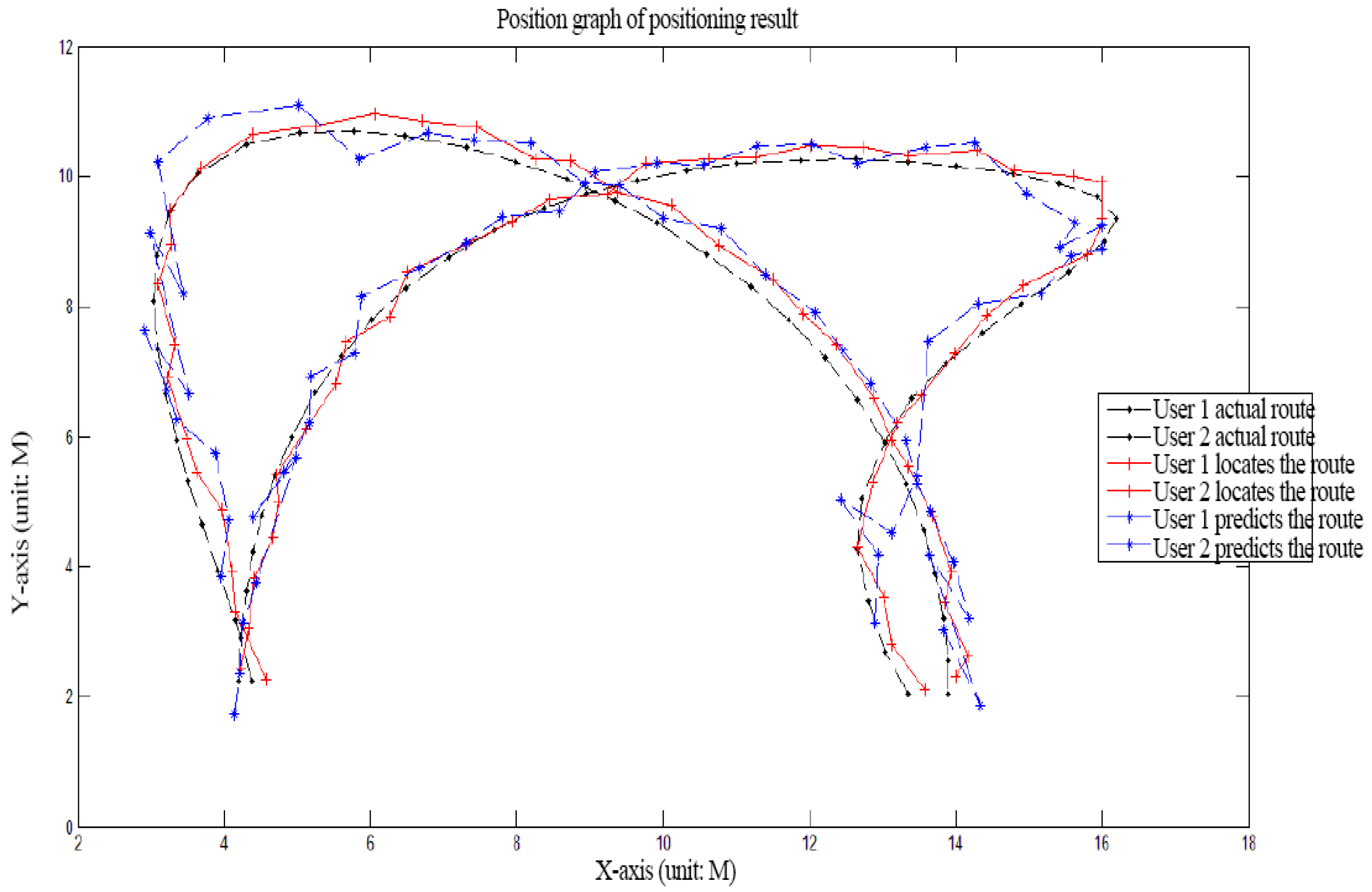
| Time | User A Location | User B Location | ||||
|---|---|---|---|---|---|---|
| Actual Location | Positioning Position | Forecast Location | Actual Location | Positioning Position | Forecast Location | |
| 2 | (4.16, 3.18) | (4.17, 3.32) | (3.97, 3.85) | (13.04, 2.68) | (13.14, 2.78) | (12.91, 3.14) |
| 5 | (3.52, 5.32) | (3.64, 5.46) | (3.37, 6.27) | (12.72, 5.07) | (12.87, 5.32) | (13.14, 4.52) |
| 9 | (3.05, 8.08) | (3.11, 8.35) | (2.98, 9.14) | (14.37, 7.61) | (14.43, 7.88) | (15.17, 8.18) |
| 13 | (4.32, 10.51) | (4.41, 10.66) | (5.02, 11.09) | (16.21, 9.36) | (16.01, 9.37) | (15.64, 9.28) |
| 17 | (7.24, 10.47) | (7.47, 10.76) | (8.19, 10.52) | (14.01, 10.18) | (14.29, 10.41) | (13.58, 10.46) |
| 21 | (9.93, 9.28) | (10.13, 9.56) | (10.81, 9.22) | (11.01, 10.21) | (11.27, 10.31) | (10.57, 10.19) |
| 25 | (12.22, 7.22) | (12.37, 7.43) | (12.85, 6.83) | (8.38, 9.52) | (8.47, 9.66) | (7.78, 9.38) |
| 29 | (13.57, 4.58) | (13.68, 4.78) | (13.97, 4.09) | (6.03, 7.78) | (6.28, 7.84) | (5.78, 7.28) |
| 33 | (13.88, 2.04) | (14.01, 2.31) | (13.85, 3.04) | (4.71, 5.41) | (4.72, 5.42) | (4.38, 4.77) |
| Time | Actual Position Illuminance (Unit: lux) | Predicted Position Illuminance (Unit: lux) | The Luminous Flux of the Lamp (Unit: lm) | Total Luminous Flux (Unit lm) |
|---|---|---|---|---|
| 2 | A: 61.4 | A: 60.8 | L2: 191.2, L3: 286.8, L4: 429.2, L6: 192.8, L7: 453.3, L8: 463.7, Ll1: 417.9, Ll2: 439.3, L15: 264.4, L16: 337.6, L19: 99.3, L24: 286.8 | 3862.3 |
| B: 41.1 | B: 40.7 | |||
| 5 | A: 60.6 | A: 60.4 | L2: 374.2, L3: 465.8, L4: 434.3, L6: 439.7, L7: 462.8, L8: 226.6, L10: 108.7, L12: 186.3, Ll6: 163.8, L18: 96.3, L20: 464.1, L24: 229.1 | 3650.8 |
| B: 41.3 | B: 40.6 | |||
| 9 | A: 61.2 | A: 59.8 | L1: 470.1, L2: 470.1, L3: 468.5, L5: 291.6, L6: 448.4, L7: 294.6, Ll3: 137.6, L14: 355.2, L21: 206.5, L22: 470.1 | 3611.8 |
| B: 40.8 | B: 40.7 | |||
| 13 | A: 60.2 | A: 59.6 | Ll: 462.8, L2: 231.2, L5: 456.4, L6: 424.5, L10: 277.3, Ll3: 350.8, Ll6: 138.1, L17: 287.5, L18: 335.8, L21: 459.6 | 3423.8 |
| B: 40.8 | B: 40.9 | |||
| 17 | A: 60.8 | A: 60.5 | L2: 170.2, L3: 237.4, L5: 461.3, L6: 93.7, L9: 463.5, L10: 461.3, L13: 469.3, L14: 126.1, L21: 302.4 | 2784.4 |
| B: 41.1 | B: 40.7 | |||
| 21 | A: 57.9 | A: 58.6 | Ll: 112.9, L2: 199.4, L3: 310.8, L4: 287.9 L5: 124.5, L6: 106.4, L7: 271.44, L8: 50, 9, L9: 318.8L10: 136.1, Ll1: 193.1, L12: 226.8, L13: 324.4, Ll4: 154.8, L15: 277.3, L16: 357.3, Ll7: 28.3, Ll8: 15.1, L19: 97.8, L20: 212.5, L21: 30.8, L22: 199.4, L23: 56.5L24: 97.5 | 4188.5 |
| B: 43.3 | B: 41.6 | |||
| 25 | A: 61.8 | A: 60.3 | L17: 38.8, L3: 408.7, L15: 456.2, L16: 350.9, Ll8: 459.3, L19: 467.4, L20: 460.4, L22: 321.3, L23: 321.5, L24: 70.4 | 3354.3 |
| B: 40.8 | B: 40.2 | |||
| 29 | A: 60.8 | A: 60.6 | Ll4: 31.2, L7: 348.4, L12: 462.4, Ll3: l1.1, L18: 157.8, L19: 463.6, L15: 415.4, Ll6: 196.5, L20: 454.3, L21: 28.4, L23: 460.8, L24: 464.9L1: 106.5, L2: 310.8, L4: 191.5, L3: l10.6, | 3493.8 |
| B: 40.8 | B: 40.3 | |||
| 33 | A: 60.2 | A: 60.1 | L7: 104.5, L8: 280.8, L5: 216.6, L6: 159.7, L10: 123.4, Ll1: 210.2, L9: 281.5, Ll2: 150.5, L14: 237.7, L15: 271.6, L16: 99.8, L13: 345.3, L17: 227.8, Ll8: 181.6, L19: 3747, L20: 446.3, L24: 276.3L21: 359.1 L22: 96.3, L23: 254.4, | 5414.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, X.; Yu, J. The Design of Intelligent Building Lighting Control System Based on CNN in Embedded Microprocessor. Electronics 2023, 12, 1671. https://doi.org/10.3390/electronics12071671
Ding X, Yu J. The Design of Intelligent Building Lighting Control System Based on CNN in Embedded Microprocessor. Electronics. 2023; 12(7):1671. https://doi.org/10.3390/electronics12071671
Chicago/Turabian StyleDing, Xisheng, and Junqi Yu. 2023. "The Design of Intelligent Building Lighting Control System Based on CNN in Embedded Microprocessor" Electronics 12, no. 7: 1671. https://doi.org/10.3390/electronics12071671