
Health Indicator Similarity Analysis-Based Adaptive Degradation Trend Detection for Bearing Time-to-Failure Prediction

Abstract
:
1. Introduction
- (1)
- A bearing TTF prognostic approach is proposed to provide a continuously updated prediction of TTF by adaptive DT detection based on HI similarity analysis.
- (2)
- The specific FTH for each tested bearing is dynamically estimated with online monitored data and a configured SP to improve the accuracy of TTF prediction.
- (3)
- The DT of bearings is adaptively detected with the fitted degradation curve and truncated HI trajectory to address the issue of DT shifts.
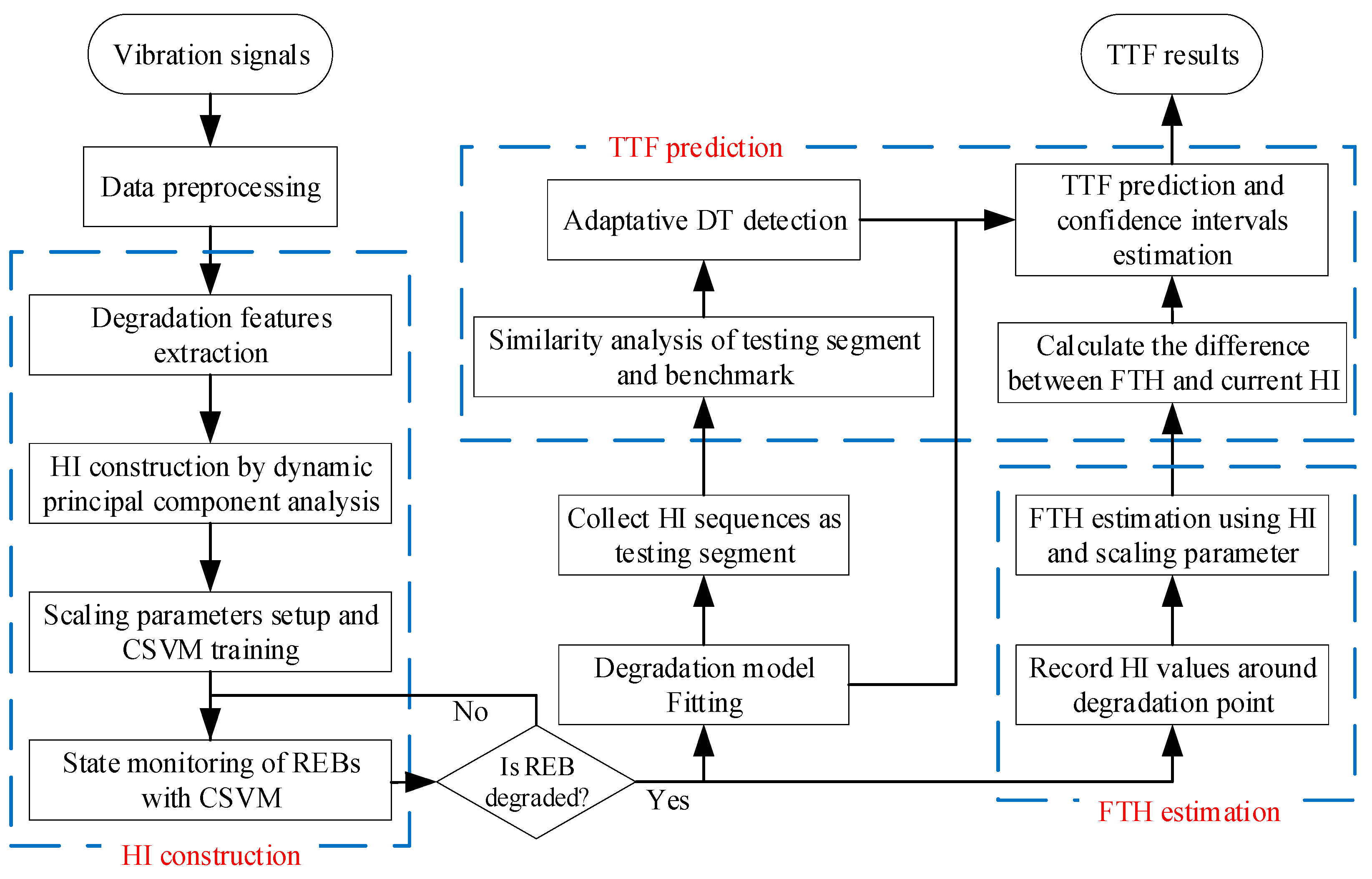
2. System Scheme of Time-to-Failure Prediction of Bearings
2.1. Health Indicator Construction by Fusing Compound Features
2.2. Failure Threshold Estimation Based on the Online HI Values
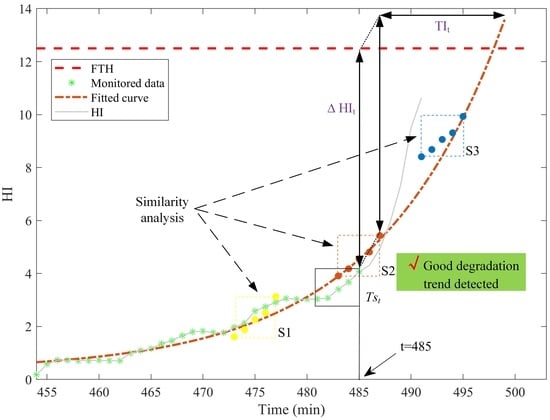
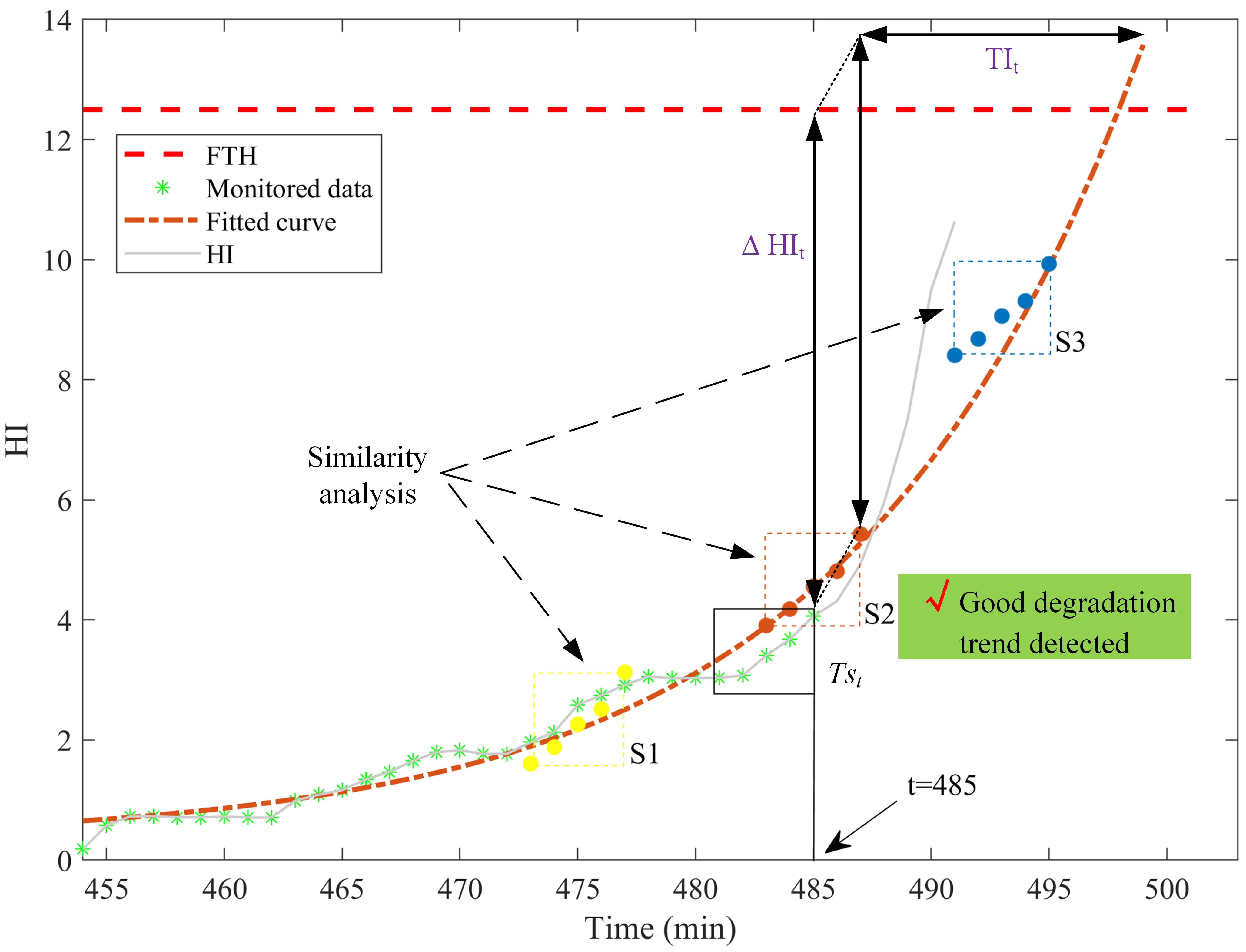
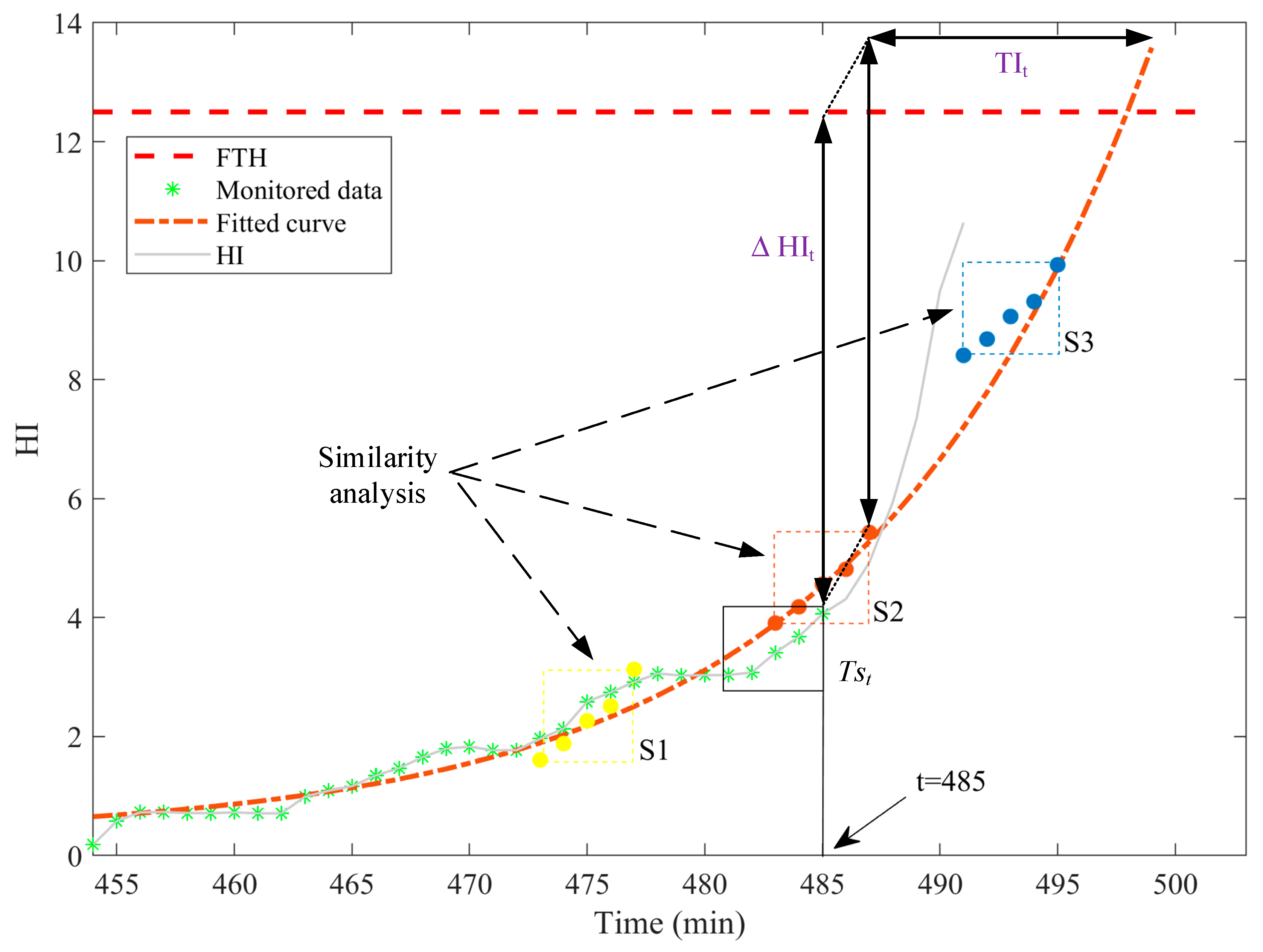
2.3. Degradation Trend Detection Using Similarity Analysis for TTF Prediction
2.4. Performance Evaluation Metrics
3. Case Study 1: XJUT-SY Bearing Dataset
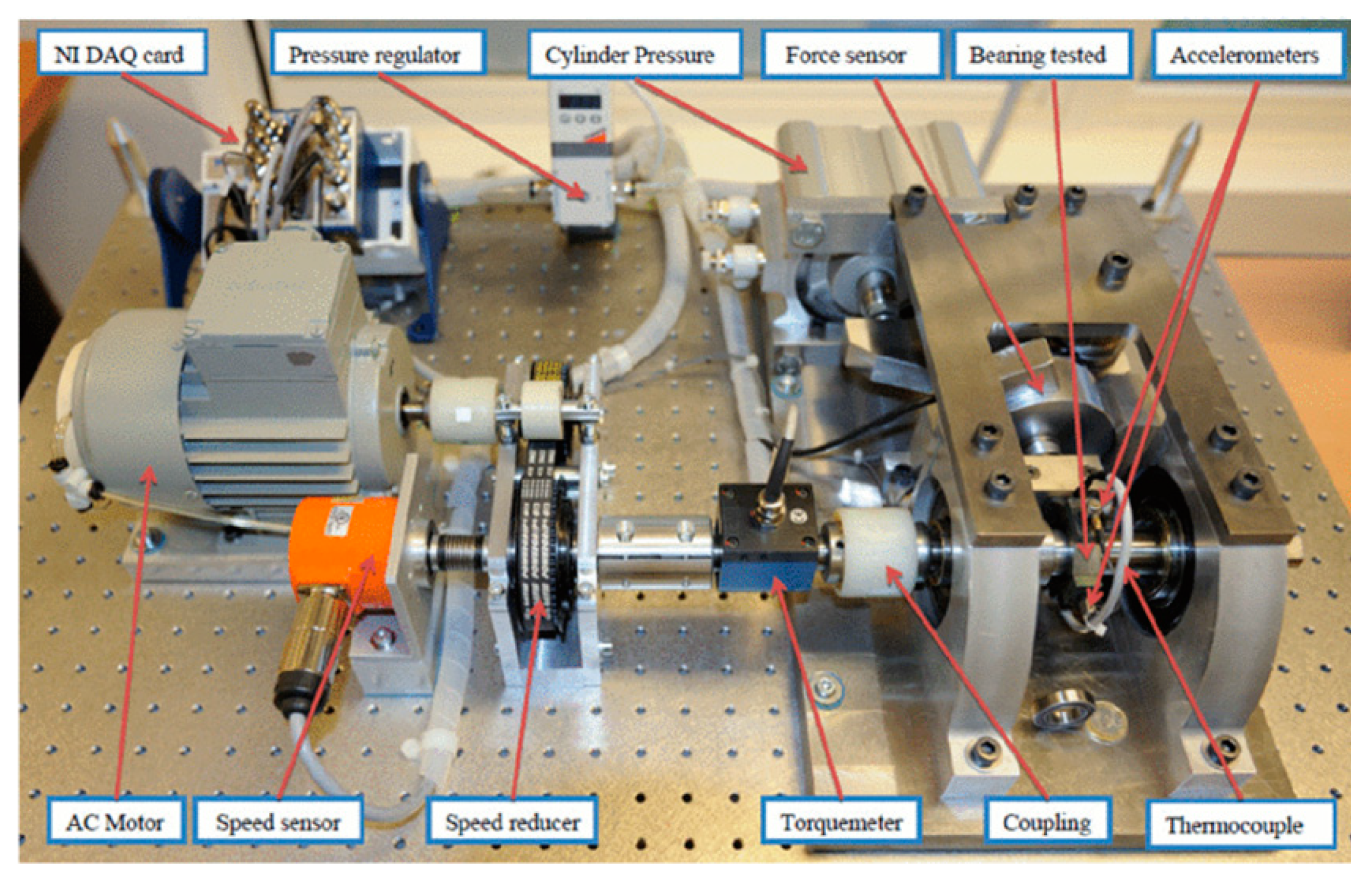
3.1. Data Description
3.2. Data Preprocessing and HI Construction
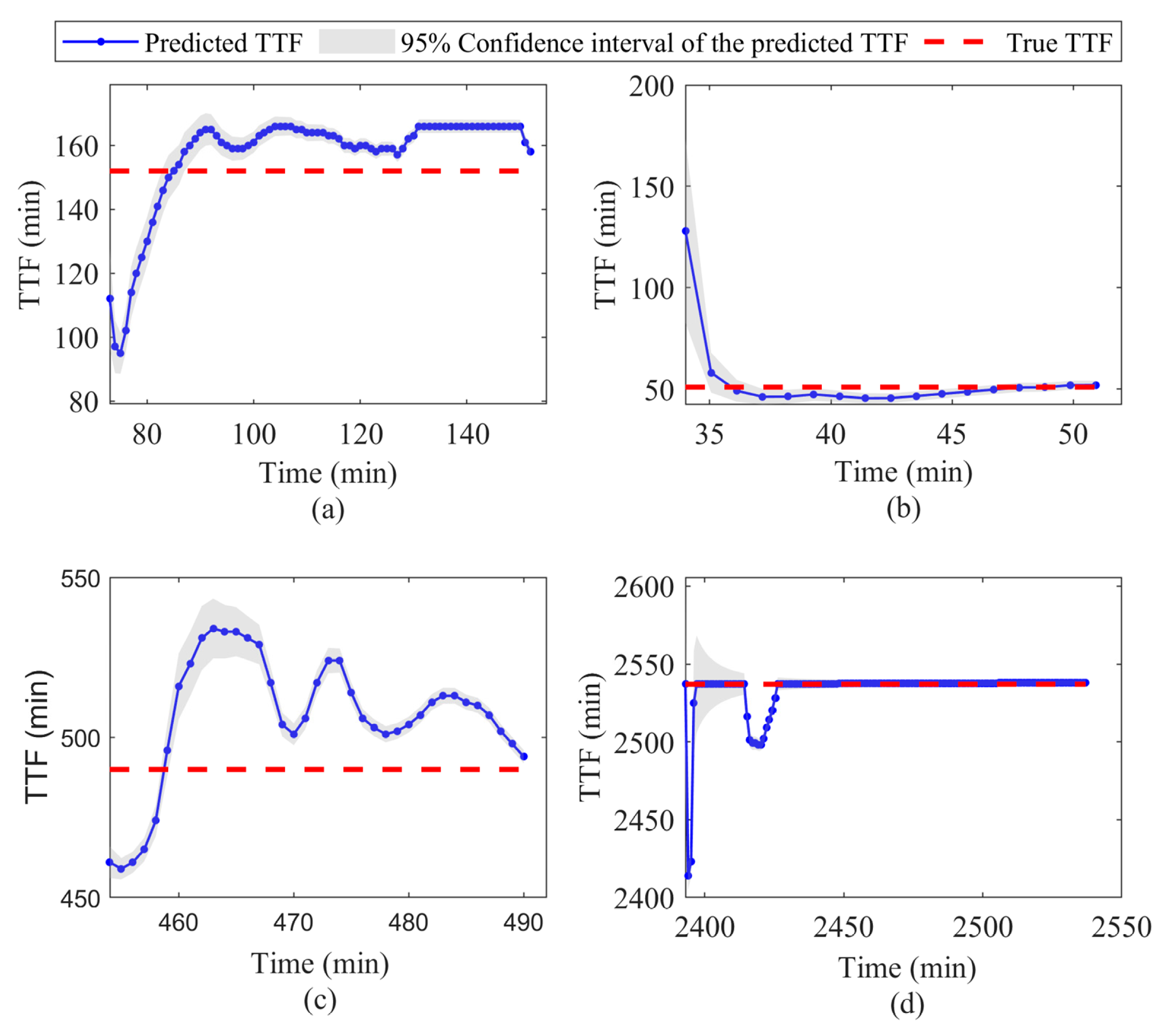
3.3. TTF Prediction
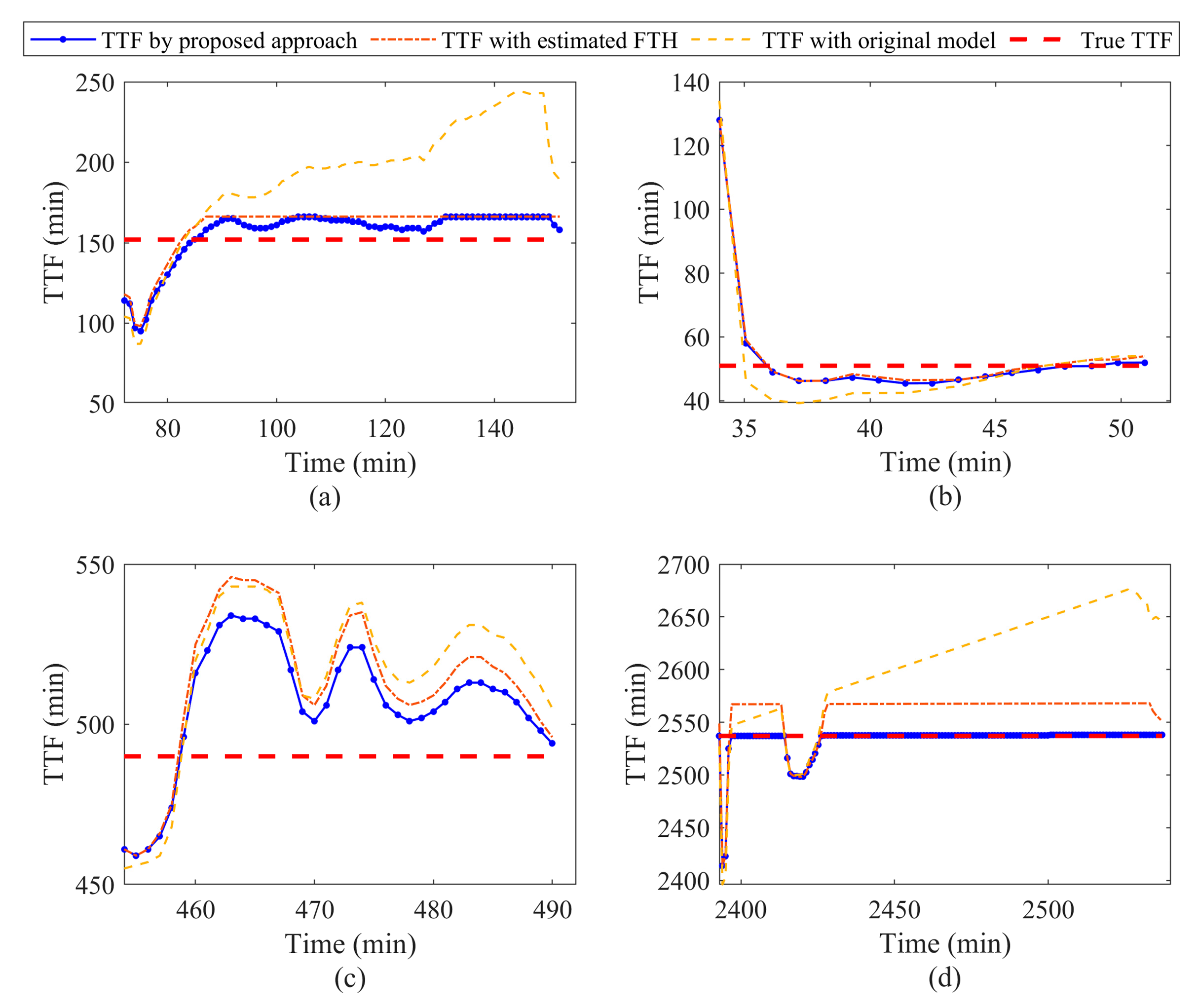
3.4. Ablation Experiments
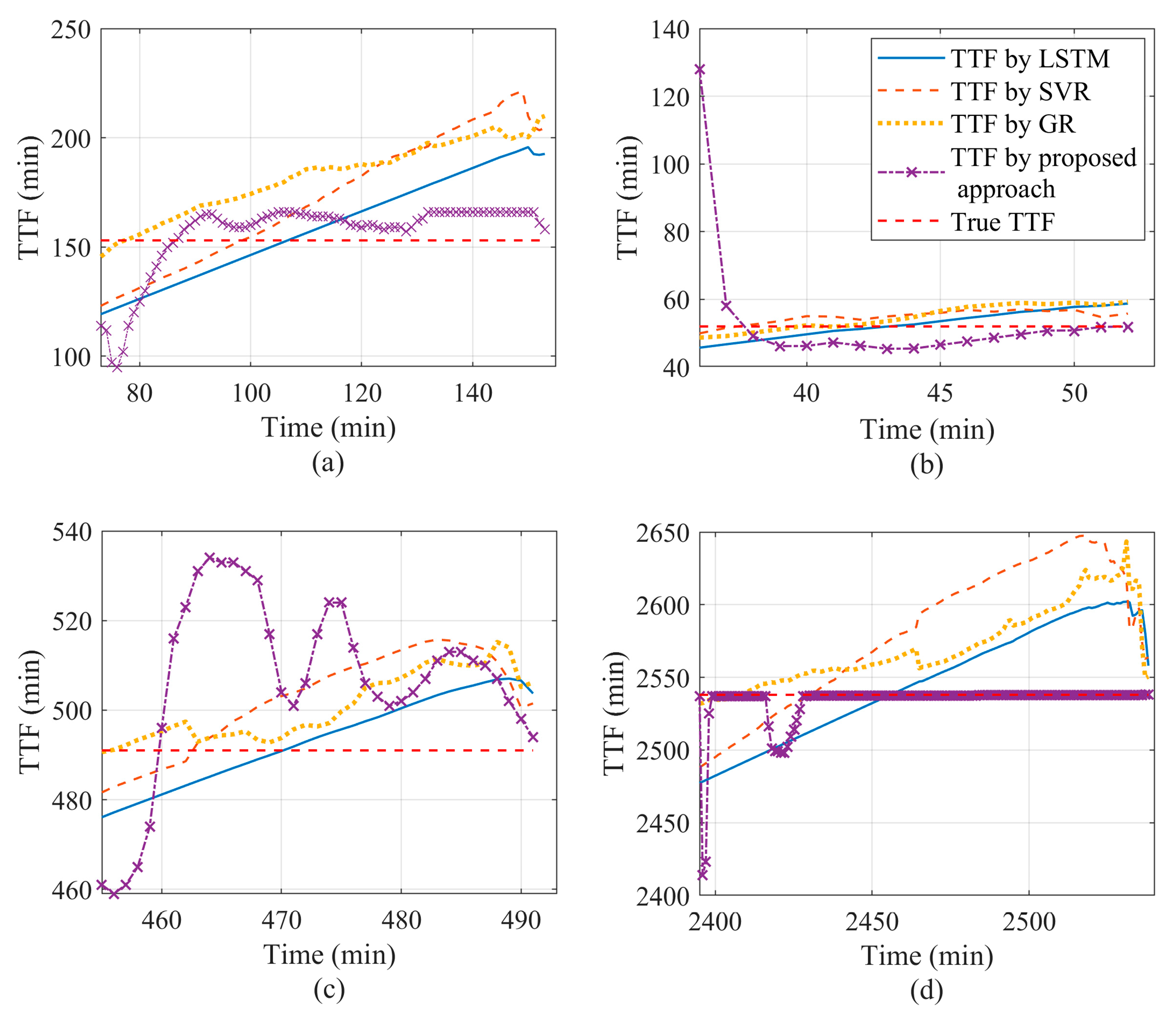
3.5. Comparisons with Other Approaches
4. Case Study 2: FEMTO-ST Bearing Dataset
4.1. Data Description
4.2. Data Preprocessing and HI Construction
4.3. TTF Prediction
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Raw vibration signal. | |
| fi | Extracted compound features. |
| HIi | Constructed HI value. |
| Sm | Score matrix computed in the DPCA algorithm. |
| Ds | Input dataset for CSVM algorithm. |
| Cl | The number of samples within the ith cluster. |
| dp | Degradation time point. |
| Sp | Scaling parameter. |
| Ts | Tested segment. |
| Fc | Fitted degradation curve. |
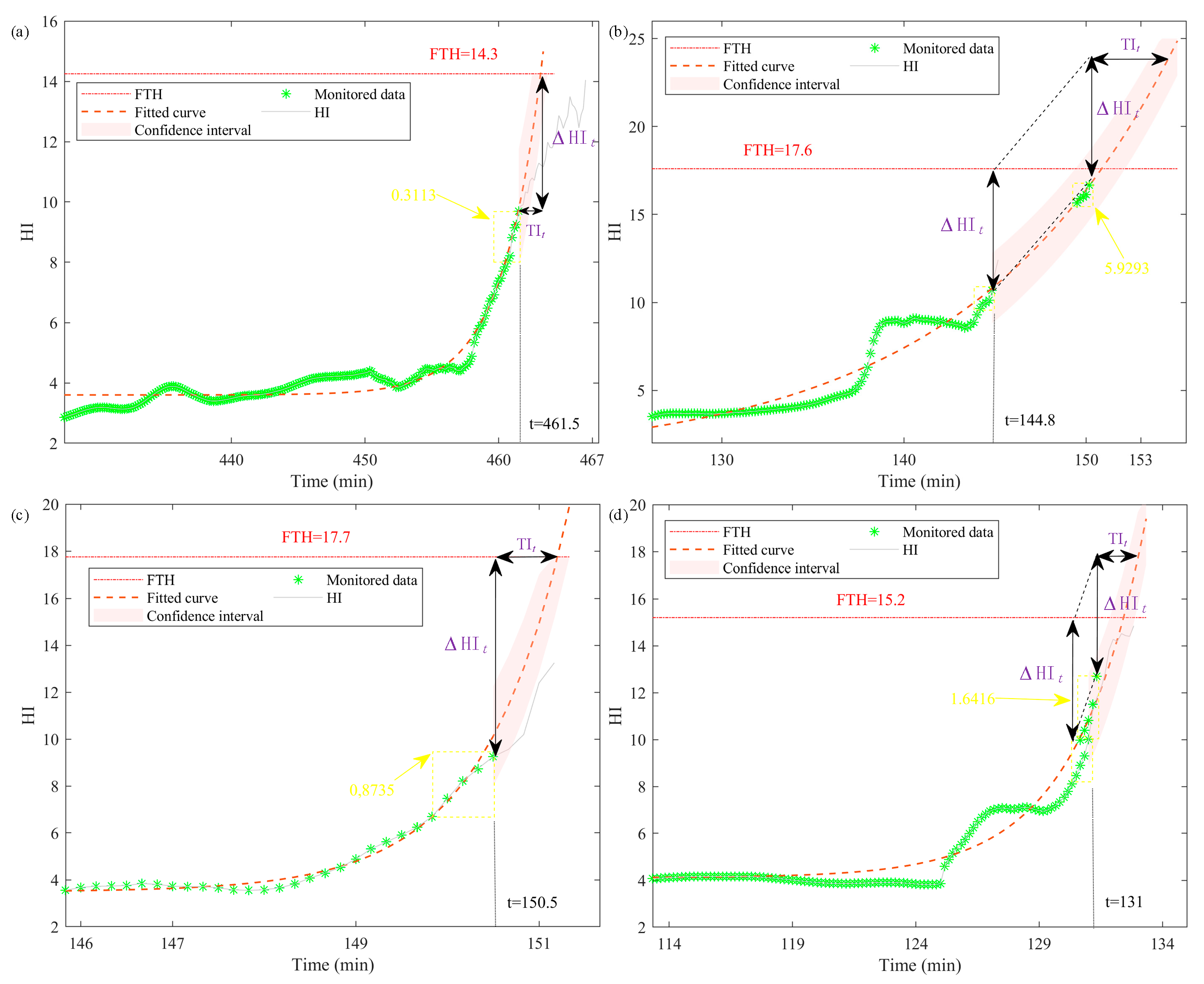
| TIt | Time interval at time t. |
| mad | Detected the most appropriate degradation trend. |
References
- Xia, M.; Li, T.; Shu, T.X.; Wan, J.F.; de Silva, C.W.; Wang, Z.R. A Two-Stage Approach for the Remaining Useful Life Prediction of Bearings Using Deep Neural Networks. IEEE Trans. Ind. Inform. 2019, 15, 3703–3711. [Google Scholar] [CrossRef]
- Pan, D.; Liu, J.-B.; Cao, J. Remaining useful life estimation using an inverse Gaussian degradation model. Neurocomputing 2016, 185, 64–72. [Google Scholar] [CrossRef] [Green Version]
- Lei, Y.; Li, N.; Gontarz, S.; Lin, J.; Radkowski, S.; Dybala, J. A Model-Based Method for Remaining Useful Life Prediction of Machinery. IEEE Trans. Reliab. 2016, 65, 1314–1326. [Google Scholar] [CrossRef]
- Xia, J.; Feng, Y.W.; Lu, C.; Fei, C.W.; Xue, X.F. LSTM-based multi-layer self-attention method for remaining useful life estimation of mechanical systems. Eng. Fail. Anal. 2021, 125, 105385. [Google Scholar] [CrossRef]
- Ragab, M.; Chen, Z.H.; Wu, M.; Foo, C.S.; Kwoh, C.K.; Yan, R.Q.; Li, X.L. Contrastive Adversarial Domain Adaptation for Machine Remaining Useful Life Prediction. IEEE Trans. Ind. Inform. 2021, 17, 5239–5249. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, C.; Wu, J.; Zhu, H.; Lee, C.K.M. Multi-dimensional recurrent neural network for remaining useful life prediction under variable operating conditions and multiple fault modes. Appl. Soft Comput. 2022, 118, 108507. [Google Scholar] [CrossRef]
- Song, Y.; Gao, S.Y.; Li, Y.B.; Jia, L.; Li, Q.Q.; Pang, F.Z. Distributed Attention-Based Temporal Convolutional Network for Remaining Useful Life Prediction. IEEE Internet Things J. 2021, 8, 9594–9602. [Google Scholar] [CrossRef]
- Wang, X.; Wang, T.Y.; Ming, A.B.; Zhang, W.; Li, A.H.; Chu, F.L. Spatiotemporal non-negative projected convolutional network with bidirectional NMF and 3DCNN for remaining useful life estimation of bearings. Neurocomputing 2021, 450, 294–310. [Google Scholar] [CrossRef]
- Ding, Y.F.; Jia, M.P.; Miao, Q.H.; Huang, P. Remaining useful life estimation using deep metric transfer learning for kernel regression. Reliab. Eng. Syst. Saf. 2021, 212, 107583. [Google Scholar] [CrossRef]
- Li, N.; Lei, Y.; Lin, J.; Ding, S.X. An Improved Exponential Model for Predicting Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Ind. Electron. 2015, 62, 7762–7773. [Google Scholar] [CrossRef]
- Wu, J.; Wu, C.; Cao, S.; Or, S.W.; Deng, C.; Shao, X. Degradation Data-Driven Time-To-Failure Prognostics Approach for Rolling Element Bearings in Electrical Machines. IEEE Trans. Ind. Electron. 2019, 66, 529–539. [Google Scholar] [CrossRef]
- Duan, J.; Shi, T.; Zhou, H.; Xuan, J.; Wang, S. A novel ResNet-based model structure and its applications in machine health monitoring. J. Vib. Control 2020, 27, 1036–1050. [Google Scholar] [CrossRef]
- Wang, Y.; Peng, Y.; Zi, Y.; Jin, X.; Tsui, K.L. A two-stage data-driven-based prognostic approach for bearing degradation problem. IEEE Trans. Ind. Inform. 2016, 12, 924–932. [Google Scholar] [CrossRef]
- Yang, C.S.; Lou, Q.F.; Liu, J.; Yang, Y.B.; Cheng, Q.Q. Particle filtering-based methods for time to failure estimation with a real-world prognostic application. Appl. Intell. 2018, 48, 2516–2526. [Google Scholar] [CrossRef]
- Liao, L. Discovering Prognostic Features Using Genetic Programming in Remaining Useful Life Prediction. IEEE Trans. Ind. Electron. 2014, 61, 2464–2472. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhu, H.; Hu, K.; Wu, J.; Shao, X.; Wang, Y. Reliability prediction of machinery with multiple degradation characteristics using double-Wiener process and Monte Carlo algorithm. Mech. Syst. Signal Process. 2019, 134, 106333. [Google Scholar] [CrossRef]
- Kundu, P.; Chopra, S.; Lad, B.K. Multiple failure behaviors identification and remaining useful life prediction of ball bearings. J. Intell. Manuf. 2019, 30, 1795–1807. [Google Scholar] [CrossRef]
- Witczak, M.; Mrugalski, M.; Lipiec, B. Remaining Useful Life Prediction of MOSFETs via the Takagi–Sugeno Framework. Energies 2021, 14, 2135. [Google Scholar] [CrossRef]
- Chen, Z.; Zhu, H.; Wu, J.; Fan, L. Health indicator construction for degradation assessment by embedded LSTM–CNN autoencoder and growing self-organized map. Knowl.-Based Syst. 2022, 252, 109399. [Google Scholar] [CrossRef]
- Liu, K.; Huang, S. Engineering. Integration of data fusion methodology and degradation modeling process to improve prognostics. IEEE Trans. Autom. Sci. Eng. 2014, 13, 344–354. [Google Scholar] [CrossRef]
- Chehade, A.; Bonk, S.; Liu, K. Sensory-Based Failure Threshold Estimation for Remaining Useful Life Prediction. IEEE Trans. Reliab. 2017, 66, 939–949. [Google Scholar] [CrossRef]
- Liu, K.; Gebraeel, N.; Shi, J. Engineering. A data-level fusion model for developing composite health indices for degradation modeling and prognostic analysis. IEEE Trans. Autom. Sci. Eng. 2013, 10, 652–664. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, J.; Wu, J.; Zhu, H.; Wang, Y. Abnormal symptom-triggered remaining useful life prediction for rolling element bearings. J. Vib. Control 2022. [Google Scholar] [CrossRef]
- Hou, M.; Pi, D.; Li, B. Similarity-based deep learning approach for remaining useful life prediction. Measurement 2020, 159, 107788. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhu, H.; Hu, K.; Wu, J.; Shao, X.; Wang, Y. Health Degradation Monitoring of Rolling Element Bearing by Growing Self- Organizing Mapping and Clustered Support Vector Machine. IEEE Access 2019, 7, 135322–135331. [Google Scholar] [CrossRef]
- Wang, B.; Lei, Y.; Li, N.; Li, N. A Hybrid Prognostics Approach for Estimating Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Reliab. 2018, 69, 401–412. [Google Scholar] [CrossRef]
- Wang, Y.; Deng, C.; Wu, J.; Xiong, Y. Failure time prediction for mechanical device based on the degradation sequence. J. Intell. Manuf. 2013, 26, 1181–1199. [Google Scholar] [CrossRef]
- Har-Peled, S.; Raichel, B. The Frechet distance revisited and extended. ACM Trans. Algorithms 2014, 10, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Suh, S.; Lukowicz, P.; Lee, Y.O. Generalized multiscale feature extraction for remaining useful life prediction of bearings with generative adversarial networks. Knowl.-Based Syst. 2022, 237, 107866. [Google Scholar] [CrossRef]
- Chang, Y.; Chen, J.; Liu, Y.; Xu, E.; He, S. Temporal convolution-based sorting feature repeat-explore network combining with multi-band information for remaining useful life estimation of equipment. Knowl.-Based Syst. 2022, 249, 108958. [Google Scholar] [CrossRef]
- Lin, T.; Wang, H.; Guo, X.; Wang, P.; Song, L. A novel prediction network for remaining useful life of rotating machinery. Int. J. Adv. Manuf. Technol. 2022, 124, 4009–4018. [Google Scholar] [CrossRef]
- Nectoux, P.; Gouriveau, R.; Medjaher, K.; Ramasso, E.; Chebel-Morello, B.; Zerhouni, N.; Varnier, C. PRONOSTIA: An experimental platform for bearings accelerated degradation tests. In Proceedings of the IEEE International Conference on Prognostics and Health Management, PHM’12, Beijing, China, 23–25 May 2012; pp. 1–8. [Google Scholar]
- Cartella, F.; Lemeire, J.; Dimiccoli, L.; Sahli, H. Hidden Semi-Markov Models for Predictive Maintenance. Math. Probl. Eng. 2015, 2015, 278120. [Google Scholar] [CrossRef] [Green Version]
- Zhao, M.; Tang, B.; Tan, Q. Bearing remaining useful life estimation based on time–frequency representation and supervised dimensionality reduction. Measurement 2016, 86, 41–55. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Errors (%) | CRA | ||||||
|---|---|---|---|---|---|---|---|---|
| Bearing 1_3 | Bearing 1_5 | Bearing 2_1 | Bearing 3_1 | Bearing 1_3 | Bearing 1_5 | Bearing 2_1 | Bearing 3_1 | |
| Proposed approach | 3.27 | 0.11 | 0.61 | 0 | 0.9091 | 0.9827 | 0.9803 | 0.9987 |
| LSTM | 25.88 | 13 | 2.59 | 0.79 | 0.7162 | 0.8604 | 0.9651 | 0.9771 |
| SVR | 33.63 | 7.27 | 2.14 | 1.02 | 0.6148 | 0.9258 | 0.9736 | 0.9806 |
| GR | 37.25 | 14.05 | 3.09 | 0.49 | 0.6444 | 0.8567 | 0.9623 | 0.9768 |
| Wang et al. [26] | N/A | N/A | N/A | N/A | 0.8482 | 0.7878 | 0.8621 | 0.8942 |
| Sun et al. [29] | 7.01 | N/A | 2.59 | N/A | 0.53.6 | N/A | 0.5721 | N/A |
| Chang et al. [30] | N/A | 2.74 | N/A | N/A | N/A | 0.955 | N/A | N/A |
| Lin et al. [31] | N/A | N/A | 3.48 | 0 | N/A | N/A | 0.9727 | 0.9706 |
| Method | Errors (%) | CRA | ||||||
|---|---|---|---|---|---|---|---|---|
| Bearing 1_1 | Bearing 1_2 | Bearing 2_1 | Bearing 2_2 | Bearing 1_1 | Bearing 1_2 | Bearing 2_1 | Bearing 2_2 | |
| Proposed approach | 0.04 | 0.0 | 0.0 | 0.13 | 0.9995 | 0.9954 | 1.0 | 0.9868 |
| LSTM | 0.6 | 0.34 | 0.3 | 2.44 | 0.9929 | 0.9767 | 0.9911 | 0.7643 |
| SVR | 2.4 | 1.18 | 0.54 | 16.4 | 0.974 | 0.9608 | 0.9885 | 0.7788 |
| Original model | 0.04 | 8.15 | 0.88 | 34.88 | 0.972 | 0.8912 | 0.9923 | 0.5458 |
| Wang et al. [26] | N/A | N/A | N/A | N/A | 0.9047 | 0.8546 | 0.8621 | 0.6521 |
| Wu et al. [11] | 0.02 | N/A | 0.22 | 0.37 | 0.98 | N/A | 0.78 | 0.63 |
| Cartella et al. [33] | 37.72 | 49.73 | 27.18 | 18.1 | N/A | N/A | N/A | N/A |
| Zhao et al. [34] | 13.9 | 65.55 | 47.2 | 17.3 | N/A | N/A | N/A | N/A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Zhu, H.; Fan, L.; Lu, Z. Health Indicator Similarity Analysis-Based Adaptive Degradation Trend Detection for Bearing Time-to-Failure Prediction. Electronics 2023, 12, 1569. https://doi.org/10.3390/electronics12071569
Chen Z, Zhu H, Fan L, Lu Z. Health Indicator Similarity Analysis-Based Adaptive Degradation Trend Detection for Bearing Time-to-Failure Prediction. Electronics. 2023; 12(7):1569. https://doi.org/10.3390/electronics12071569
Chicago/Turabian StyleChen, Zhipeng, Haiping Zhu, Liangzhi Fan, and Zhiqiang Lu. 2023. "Health Indicator Similarity Analysis-Based Adaptive Degradation Trend Detection for Bearing Time-to-Failure Prediction" Electronics 12, no. 7: 1569. https://doi.org/10.3390/electronics12071569