
Multiple-Network-Based Control System Design for Unmanned Surveillance Applications
 ,
,
Abstract
:1. Introduction
- The long-term cost scenario demonstrated using multiple networks.
- We realized a real-time unmanned security system by simultaneously using fixed and mobile agents.
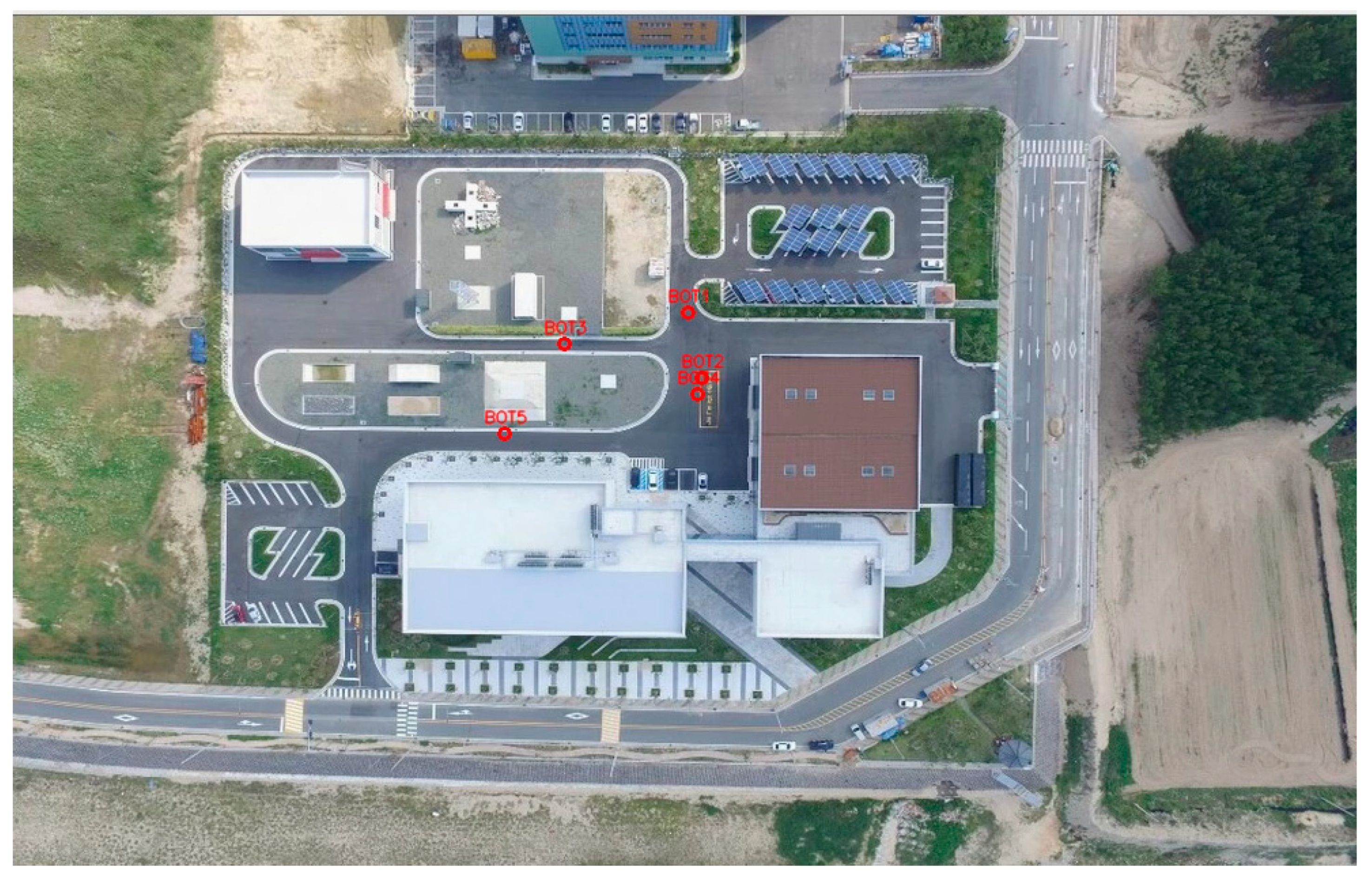
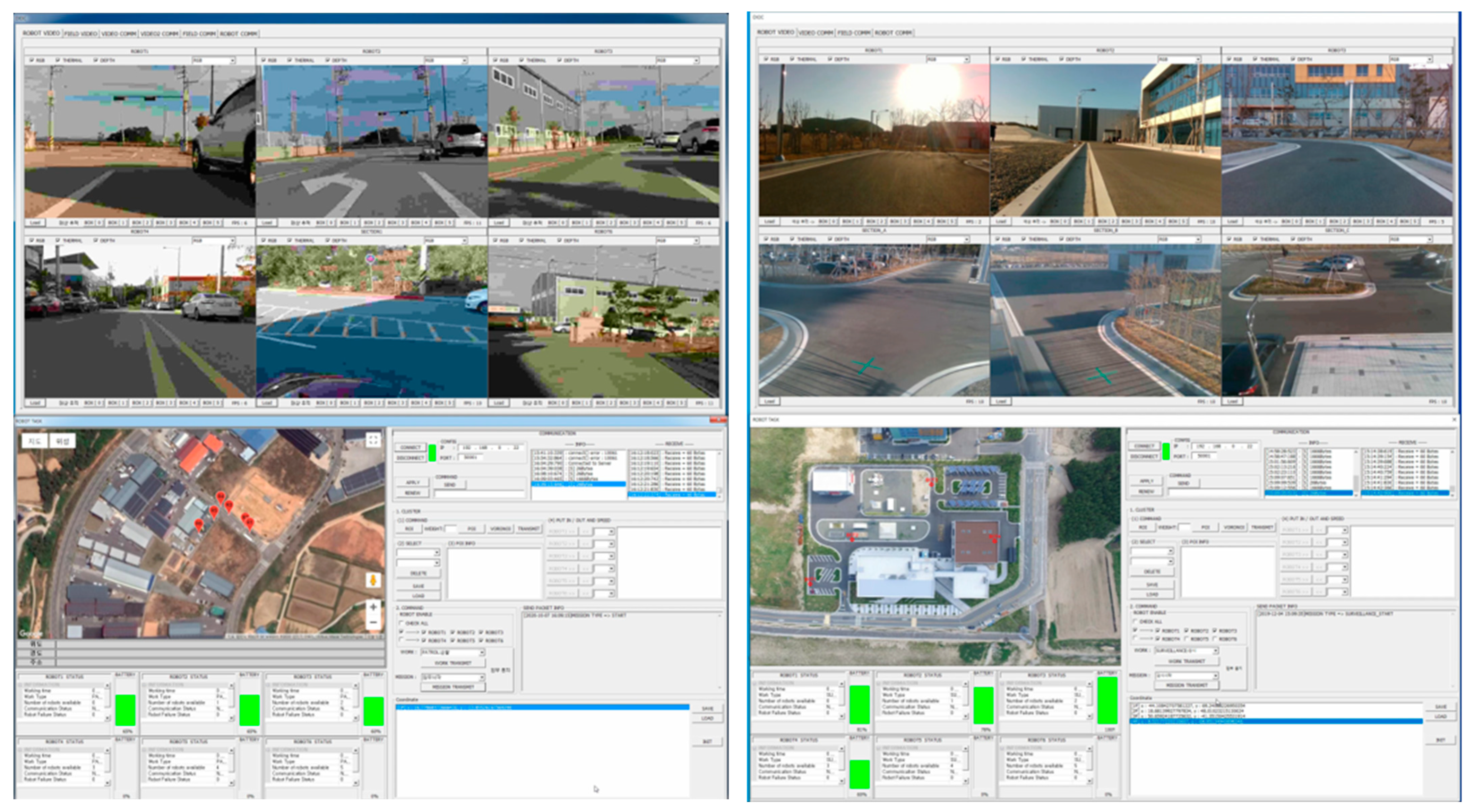
- We present examples of applying this system to multiple sites at the same time.
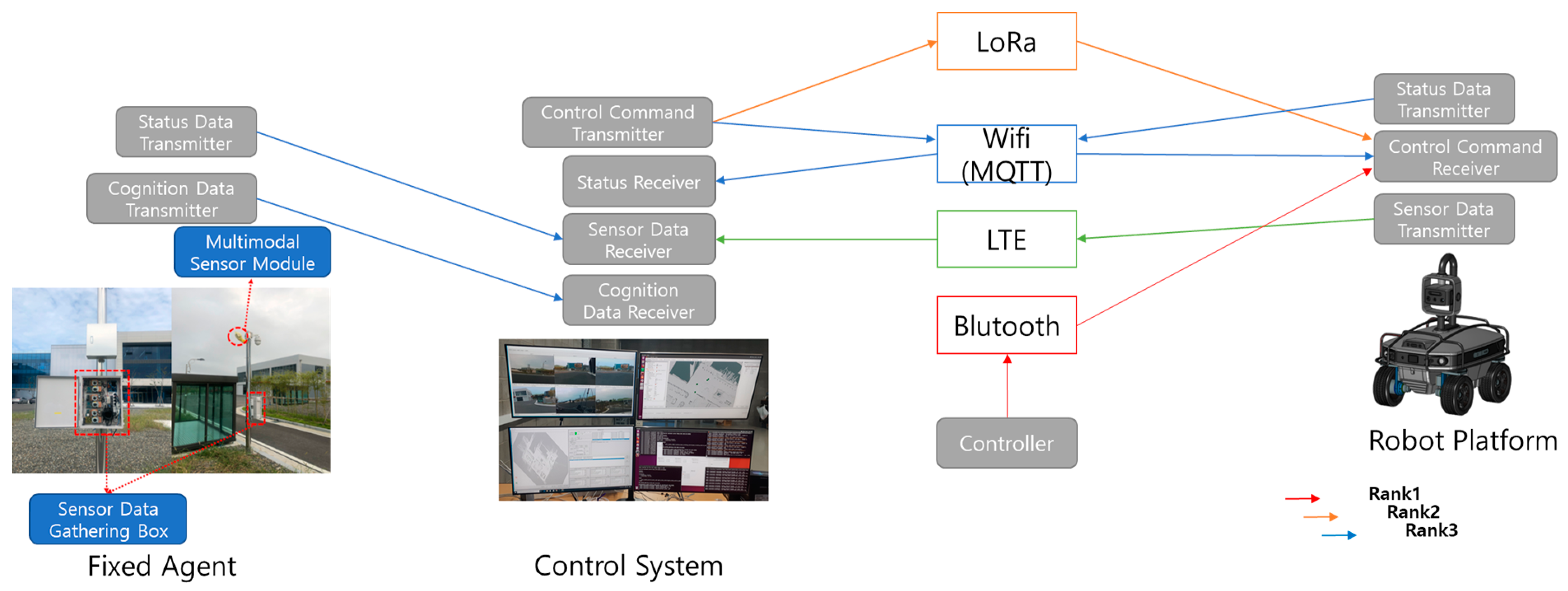
2. Multiple-Network System
2.1. Four Types of Communication Methods
- Bluetooth (controller): short-range (within 20 m) wireless control (mode (manual/autonomous/remote), linear speed, angular speed, speed increase, speed decrease);
- LoRa (emergency): emergency start/stop, return command, reboot command when communication is impossible in normal status;
- Wi-Fi (usual): mission command (robot mission (patrol, monitoring), target point list, mission start, emergency stop) and normal message (robot current position, previous target point, current target point, robot status message), remote control (start/stop, linear speed, angular speed, speed increase, speed decrease);
- LTE (for sensor data): multimodal sensor module-based image data (three types: color, night vision, thermal image) and 10 Hz 3D LiDAR Point Cloud data.
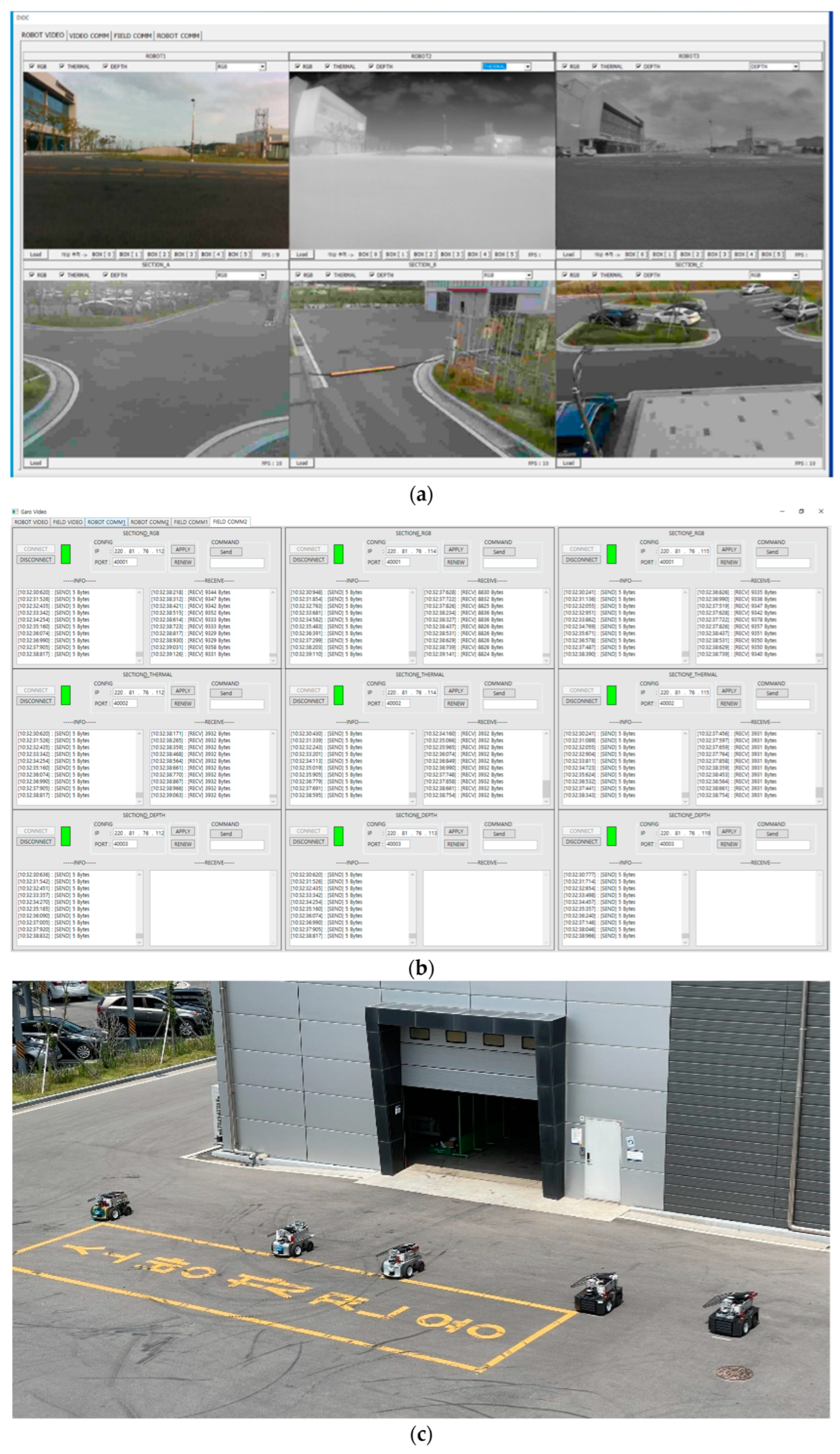
2.2. Implementation of the Network System
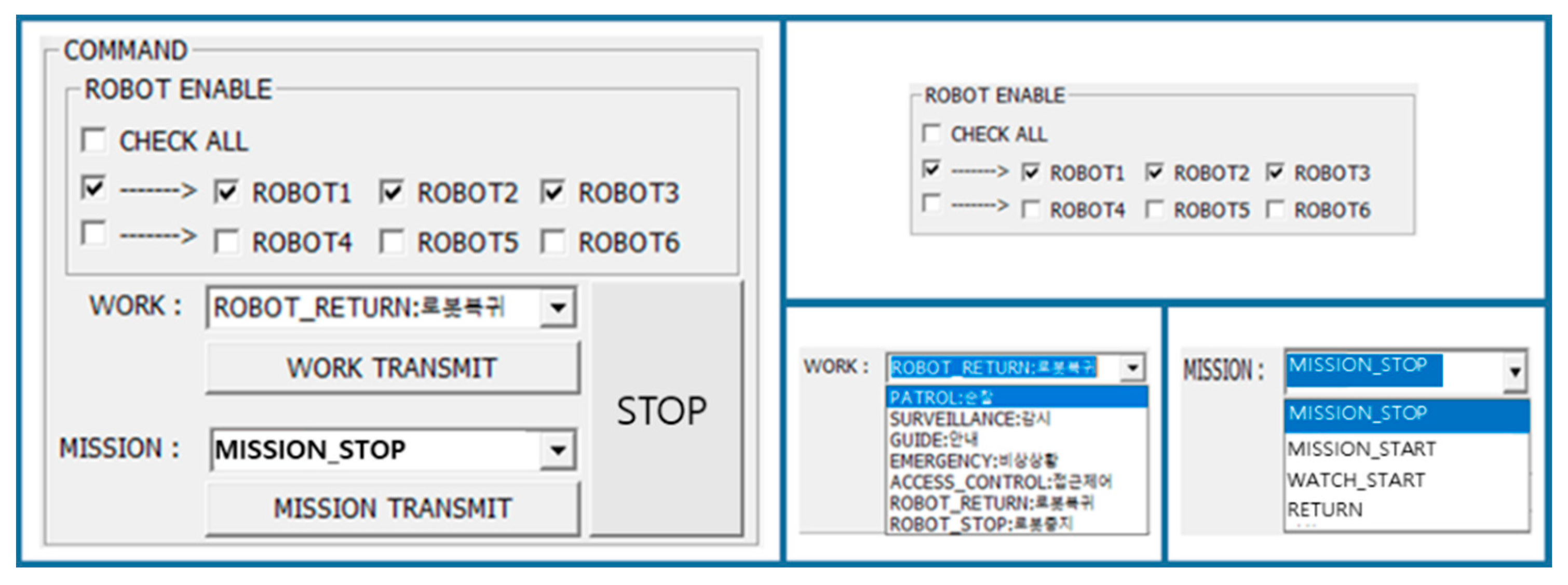
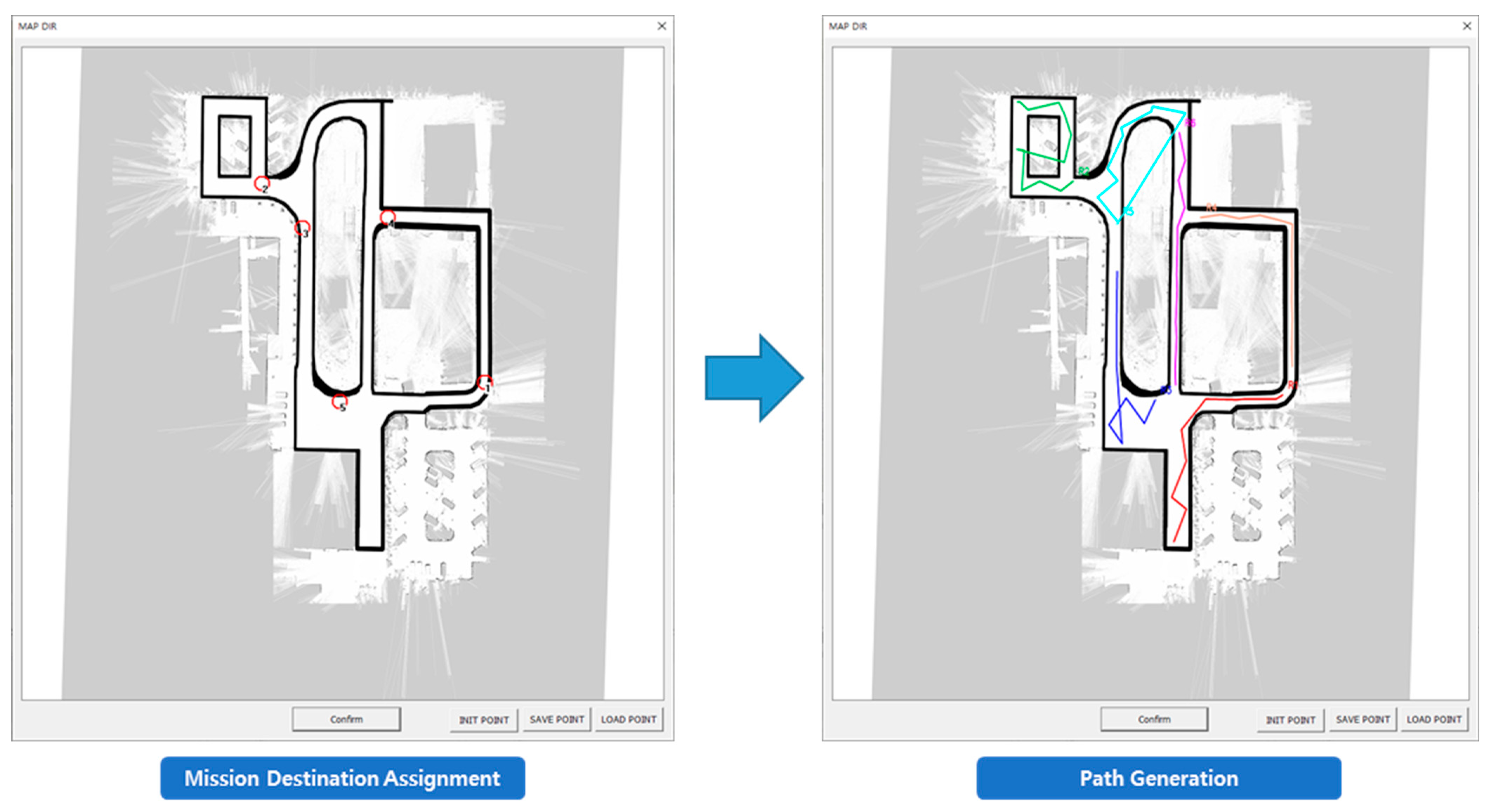
3. Unmanned Surveillance Control System
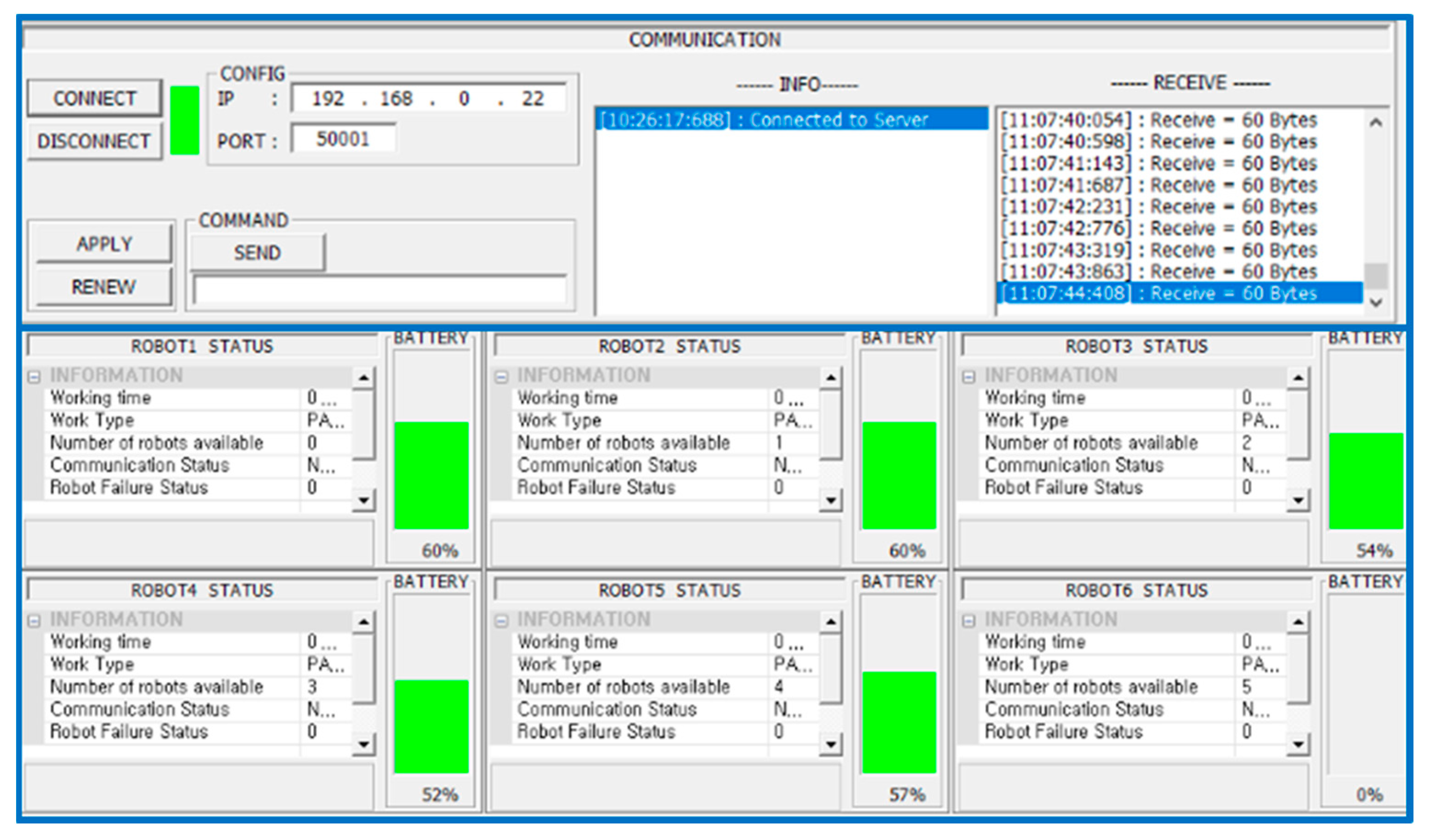
4. Control System Implementation
5. Conclusions and Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, T.M.; Tao, Y.; Lui, H. Current researches and future development trend of intelligent robot: A review. Int. J. Autom. Comput. 2018, 15, 525–546. [Google Scholar] [CrossRef]
- Mishra, B.; Garg, D.; Narang, P.; Mishra, V. Drone-surveillance for search and rescue in natural disaster. Comput. Commun. 2020, 156, 1–10. [Google Scholar] [CrossRef]
- Zhang, T.; Chowdhery, A.; Bahl, P.; Jamieson, K.; Banerjee, S. The Design and Implementation of a Wireless Video Surveillance System. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015. [Google Scholar]
- Dung, N.M.; Ro, S. Algorithm for Fire Detection Using a Camera Surveillance System. In Proceedings of the 2018 International Conference on Image and Graphics Processing, Hong Kong, China, 24–26 February 2018. [Google Scholar]
- Meguro, J.I.; Ishikawa, K.; Amano, Y.; Hashizume, T.; Takiguchi, J.; Kurosaki, R.; Hatayama, M. Creating Spatial Temporal Database by Autonomous Mobile Surveillance System (a Study of Mobile Robot Surveillance System Using Spatial Temporal GIS Part 1). In Proceedings of the IEEE International Safety, Security and Rescue Rototics, Workshop, Kobe, Japan, 6–9 June 2005. [Google Scholar]
- Shimosasa, Y.; Kanemoto, J.I.; Hakamada, K.; Horii, H.; Ariki, T.; Sugawara, Y.; Kojio, F.; Kimura, A.; Yuta, S. Some Results of the Test Operation of a Security Service System with Autonomous Guard Robot. In Proceedings of the 26th Annual Conference of the IEEE Industrial Electronics Society, Nagoya, Japan, 22–28 October 2000. [Google Scholar]
- Husman, M.A.; Albattah, W.; Abidin, Z.Z.; Mustafah, Y.M.; Kadir, K.; Habib, S.; Islam, M.; Khan, S. Unmanned Aerial Vehicles for Crowd Monitoring and Analysis. Electronics 2021, 10, 2974. [Google Scholar] [CrossRef]
- Ren, J.; Wu, T.; Zhou, X.; Yang, C.; Sun, J.; Li, M.; Jiang, H.; Zhang, A. SLAM, Path Planning Algorithm and Application Research of an Indoor Substation Wheeled Robot Navigation System. Electronics 2022, 11, 1838. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, Z.; Liu, Z.; Shi, J.; Cheng, G. Cooperative routing problem for ground vehicle and unmanned aerial vehicle: The application on intelligence, surveillance, and reconnaissance missions. IEEE Access 2019, 7, 63504–63518. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Ala, K.; Kishore, R.; Khalid, A.D.; Ahmad, M.K.; Omar, A.; Zinon, Z. On the Potential of Fuzzy Logic for Solving the Challenges of Cooperative Multi-Robotic Wireless Sensor Networks. Electronics. 2019, 8, 1513. [Google Scholar]
- Ponce, D.; Gorelov, I.A.; Chiu, H.K.; Baity Jr., F.W. Real-time multiple networked viewer capability of the DIII-D EC data acquisition system. Fusion Eng. Des. 2004, 74, 891–895. [Google Scholar] [CrossRef]
- Li, C.C.; Ji, Z.S.; Wang, F.; Yuan, Q.P.; Li, S. Preliminary implementation of the real-time data sharing system based on RFM for EAST. Fusion Eng. Des. 2018, 128, 95–100. [Google Scholar] [CrossRef]
- Avola, D.; Cinque, L.; Foresti, G.L.; Pannone, D. Visual cryptography for detecting hidden targets by small-scale robots. In Proceedings of International Conference on Pattern Recognition Applications and Methods; Springer: Cham, Germany, 2019. [Google Scholar]
- Wang, H.M.; Zhang, Y.; Zhang, X.; Li, Z. Secrecy and covert communications against UAV surveillance via multi-hop networks. IEEE Trans. Commun. 2019, 68, 389–401. [Google Scholar] [CrossRef] [Green Version]
- Iannizzotto, G.; Costanzo, C.; La Rosa, F.; Lanzafame, P. A Multimodal Perceptual User Interface for Video-Surveillance Environments. In Proceedings of the 7th international conference on Multimodal interfaces, Trento, Italy, 4–6 October 2005. [Google Scholar]
- Wojciech, S.; Włodzimierz, K.; Cezary, Z.; Wojciech, D.; Maciej, S.; Artur, W.; Maksym, F. Utilisation of Embodied Agents in the Design of Smart Human–Computer Interfaces—A Case Study in Cyberspace Event Visualisation Control. Electronics 2020, 9, 976. [Google Scholar]
- Tseng, Y.-C.; Wang, Y.-C.; Cheng, K.-Y.; Hsieh, Y.-Y. iMouse: An integrated mobile surveillance and wireless sensor system. Computer 2007, 40, 60–66. [Google Scholar] [CrossRef]
- Arroyo, P.; Herrero, J.L.; Lozano, J.; Montero, P. Integrating LoRa-Based Communications into Unmanned Aerial Vehicles for Data Acquisition from Terrestrial Beacons. Electronics 2022, 11, 1865. [Google Scholar] [CrossRef]
- Uhm, T.; Park, J.-W.; Lee, J.-D.; Bae, G.-D.; Choi, Y.-H. Design of multimodal sensor module for outdoor robot surveillance system. Electronics 2022, 11, 2214. [Google Scholar] [CrossRef]
- Noh, D.; Sung, C.; Uhm, T.; Lee, W.; Lim, H.; Choi, J.; Lee, K.; Hong, D.; Um, D.; Chung, I.; et al. X-MAS: Extremely Large-Scale Multi-Modal Sensor Dataset for Outdoor Surveillance in Real Environments. IEEE Robot. Autom. Lett. 2023, 99, 1–8. [Google Scholar] [CrossRef]
- Shin, H.; Na, K.-I.; Chang, J. Uhm, T.; Multimodal layer surveillance map based on anomaly detection using multi-agents for smart city security. ETRI J. 2022, 44, 183–193. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Model | Specifications | ||
|---|---|---|---|---|
| Distance | Frequency | Bandwidth | ||
| LoRa | uLory | 10 km | 917–923 MHz | 125 kHz |
| LoryG | 10 km | 917–923 MHz | 125 kHz | |
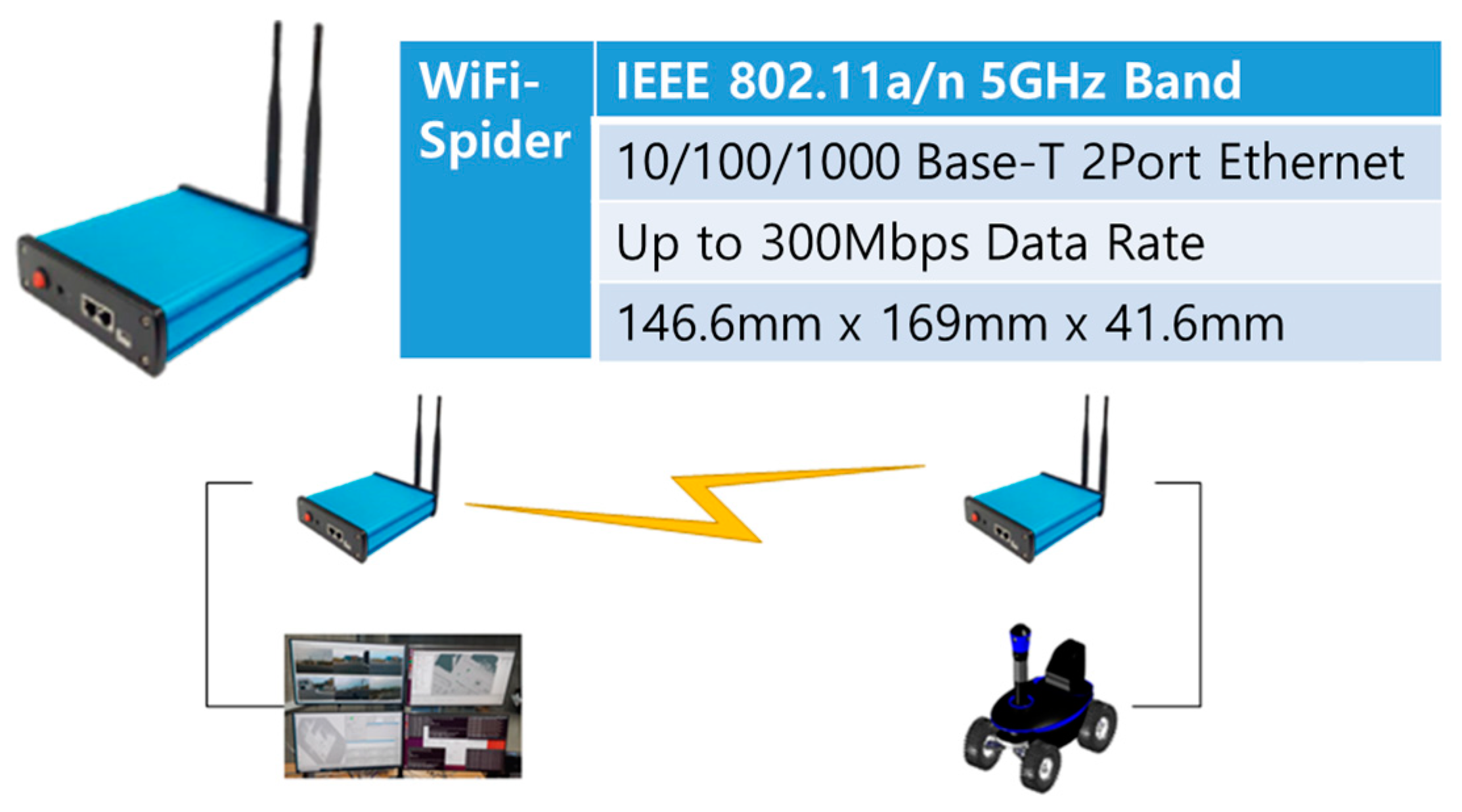
| Wi-Fi | Spider | 500 m (Hand over) | 5 GHz | 20 MHz |
| LTE | ME-Y51Wl | 100 km | 8,502,600 MHz | 100 MHz |
| Bluetooth | Logitechf710 | 10 m | 2.4 GHz | 1–2 MHz |
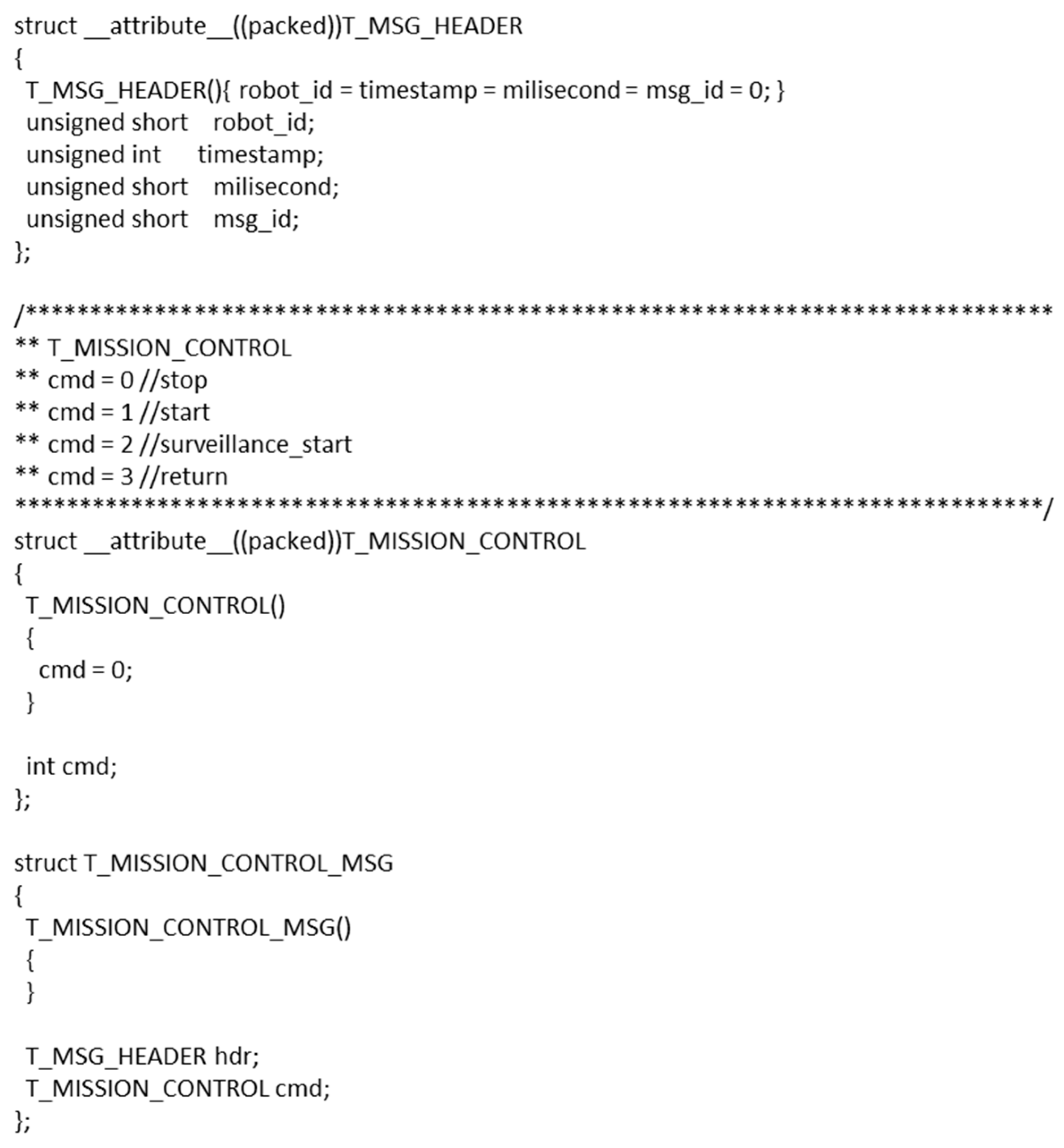
| Variable Name | Type | Contents |
|---|---|---|
| Robot ID | uint16 | Robot identification |
| Timestamp | int32 | Time |
| Millisecond | uint16 | Time |
| Message ID | uint16 | Message identification |
| cmd | int32 | 0: mission stop |
| 1: mission start | ||
| 2: surveillance start | ||
| 3: return start |
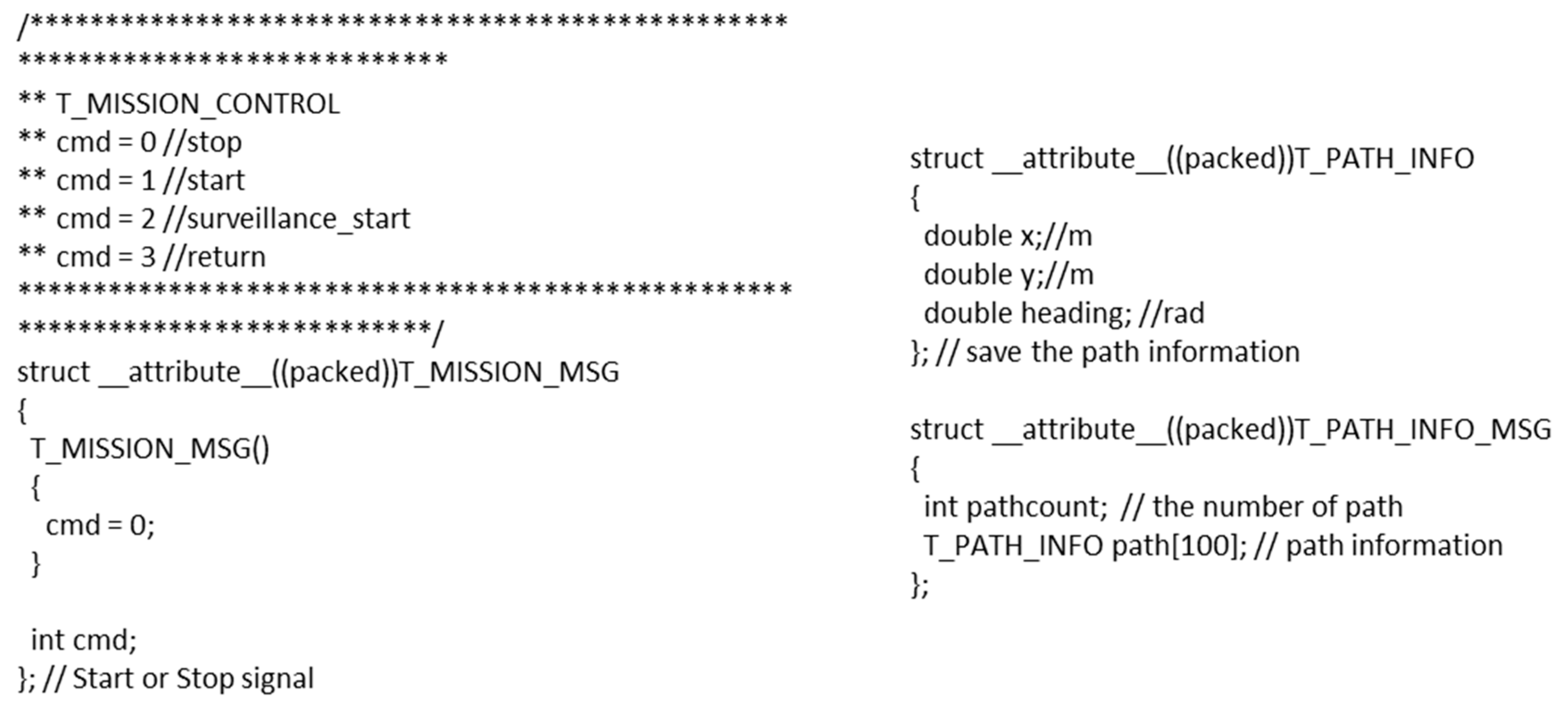
| Variable Name | Type | Contents | |
|---|---|---|---|
| Path Count | int32 | Path Amount | |
| Robot path protocol | Path info (100) | double | Map coordinate |
| (x, y, heading) | |||
| Robot mission protocol | cmd | int32 | 0: mission stop |
| 1: mission start | |||
| 2: surveillance start | |||
| 3: return start |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uhm, T.; Bae, G.; Kim, J.; Lee, H.; Lee, J.; Jung, J.; Cho, S.; Lee, K.; Choi, Y. Multiple-Network-Based Control System Design for Unmanned Surveillance Applications. Electronics 2023, 12, 595. https://doi.org/10.3390/electronics12030595
Uhm T, Bae G, Kim J, Lee H, Lee J, Jung J, Cho S, Lee K, Choi Y. Multiple-Network-Based Control System Design for Unmanned Surveillance Applications. Electronics. 2023; 12(3):595. https://doi.org/10.3390/electronics12030595
Chicago/Turabian StyleUhm, Taeyoung, Gideok Bae, Jongchan Kim, Hyojun Lee, Jongdeuk Lee, Joonyoung Jung, Sunghoon Cho, Kanghoon Lee, and Youngho Choi. 2023. "Multiple-Network-Based Control System Design for Unmanned Surveillance Applications" Electronics 12, no. 3: 595. https://doi.org/10.3390/electronics12030595