
An Artificial Neural Network for Solar Energy Prediction and Control Using Jaya-SMC
 ,
,  ,
,  ,
,
Abstract
:1. Introduction
- Implementation of artificial neural networks (ANN) to predict temperature and solar radiation as it is one of the most effective and efficient methods in all fields.
- Implementation of JAYA-SMC based approach to control DC-DC converters according to the maximum power point tracking concept (MPPT).
2. Methodology
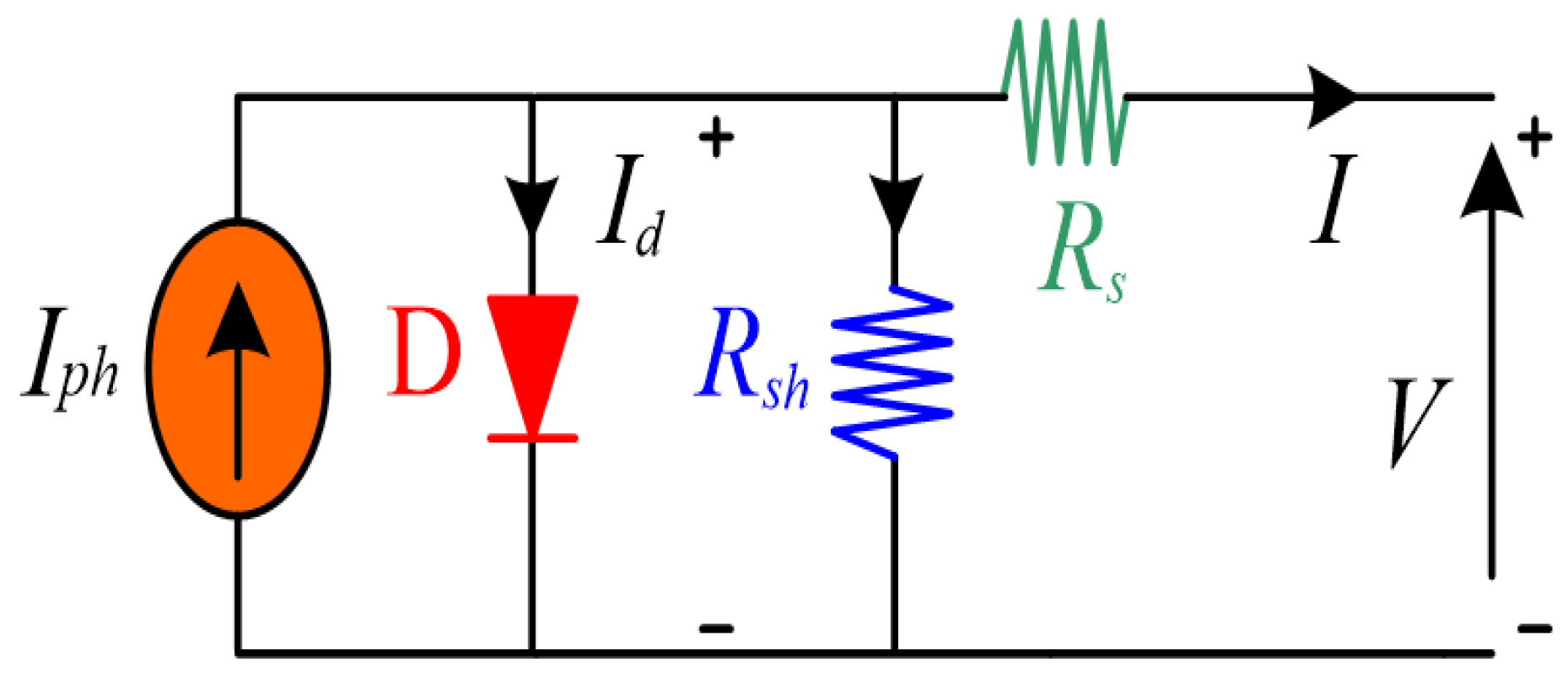
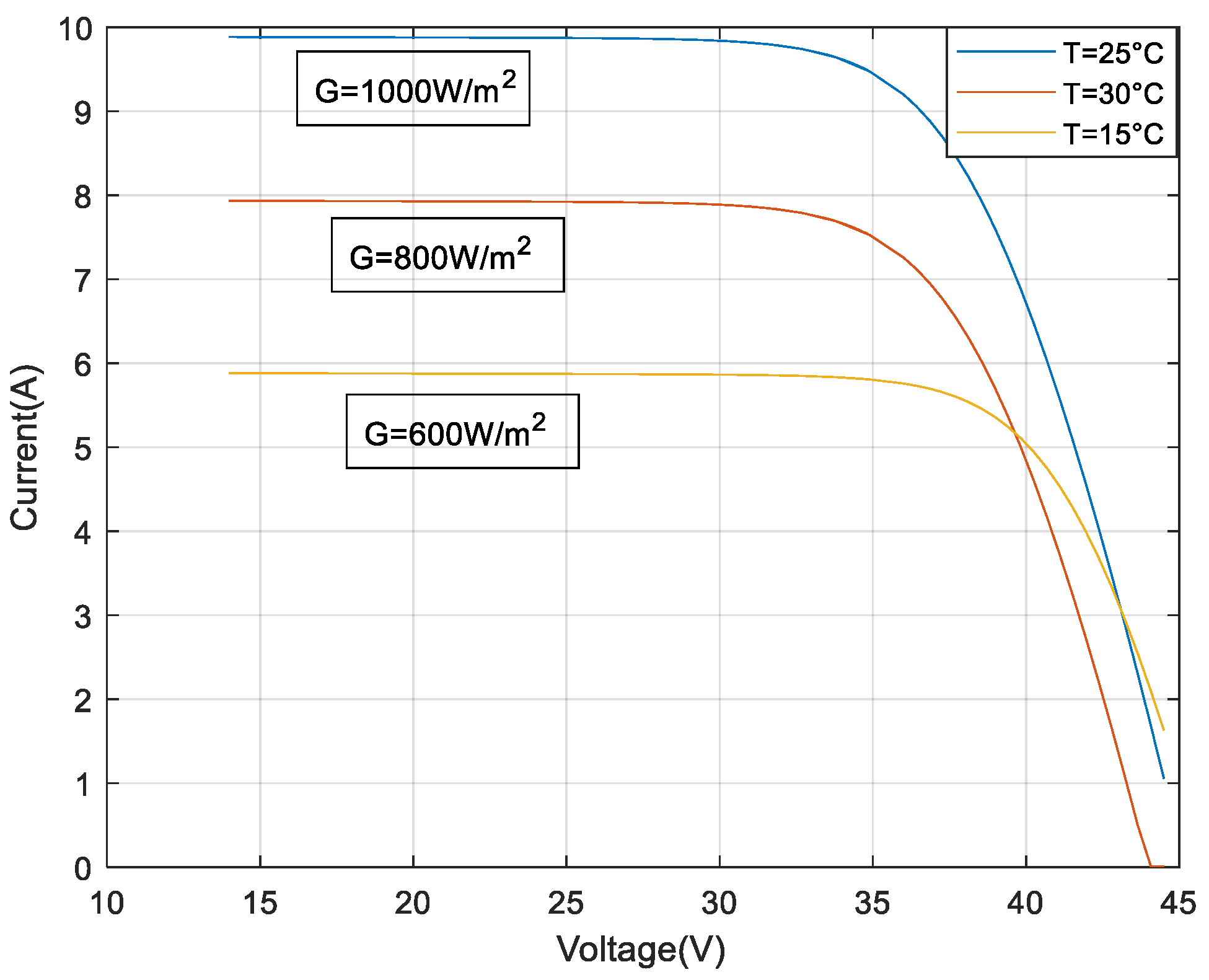
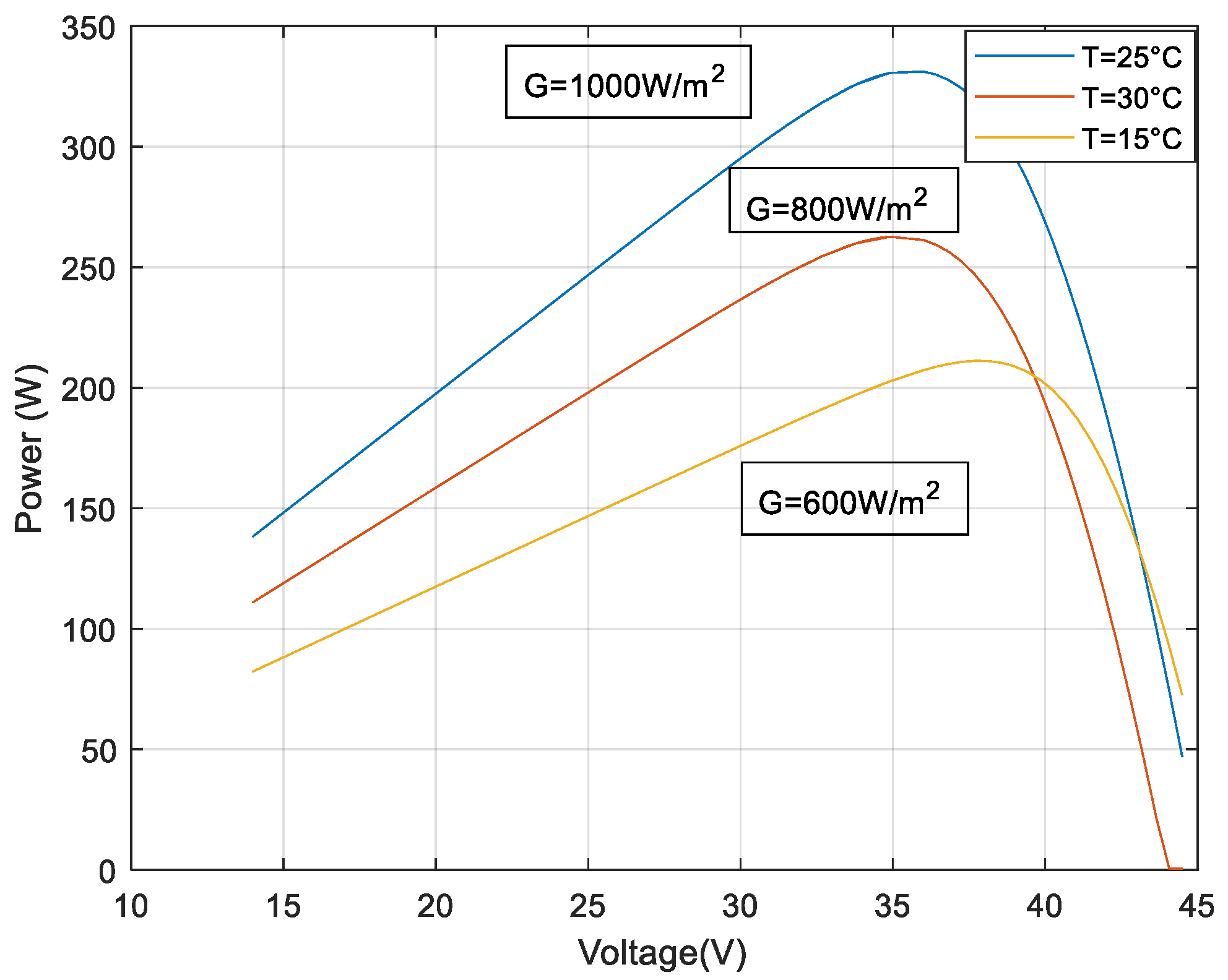
2.1. PV Panel Modeling
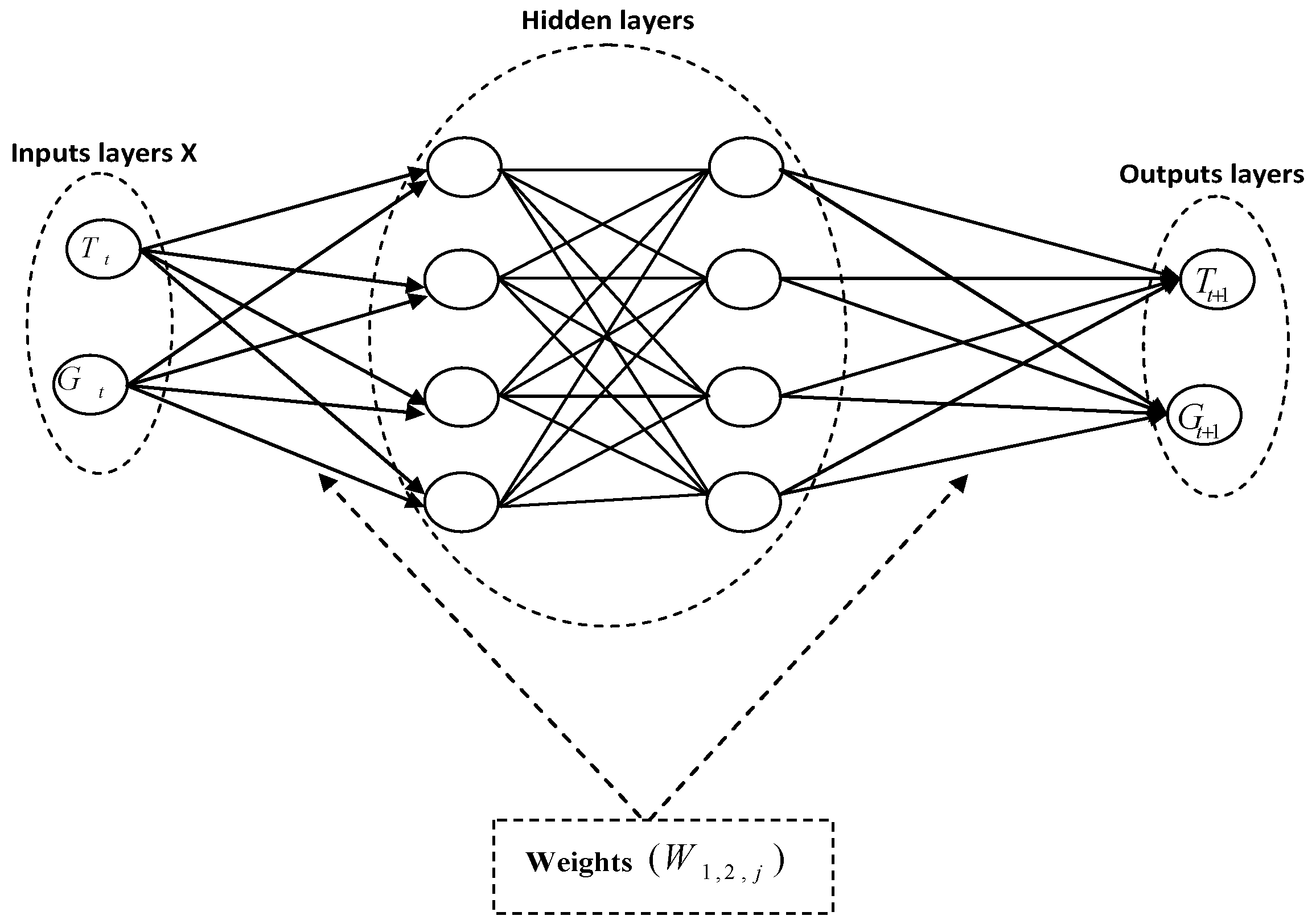
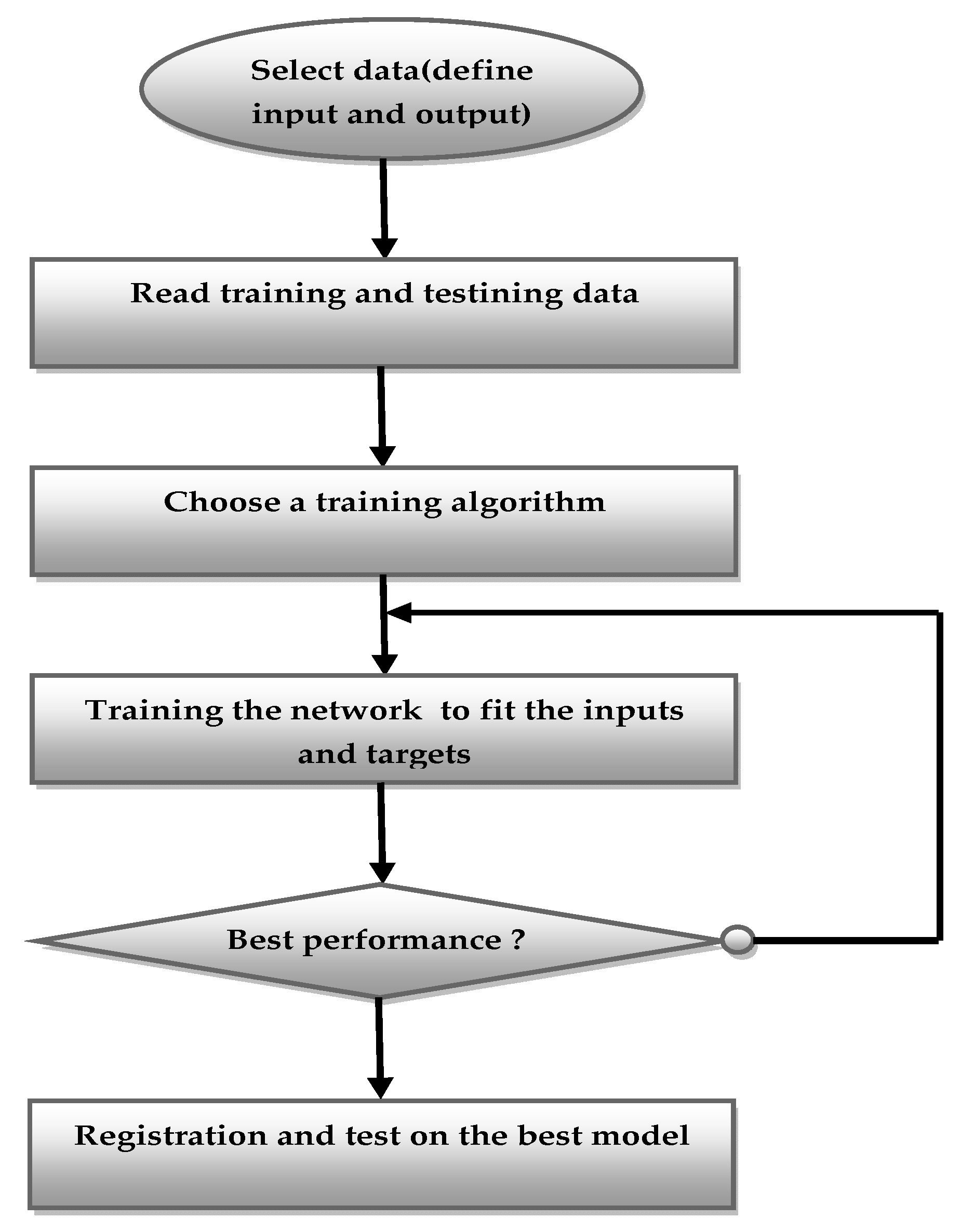
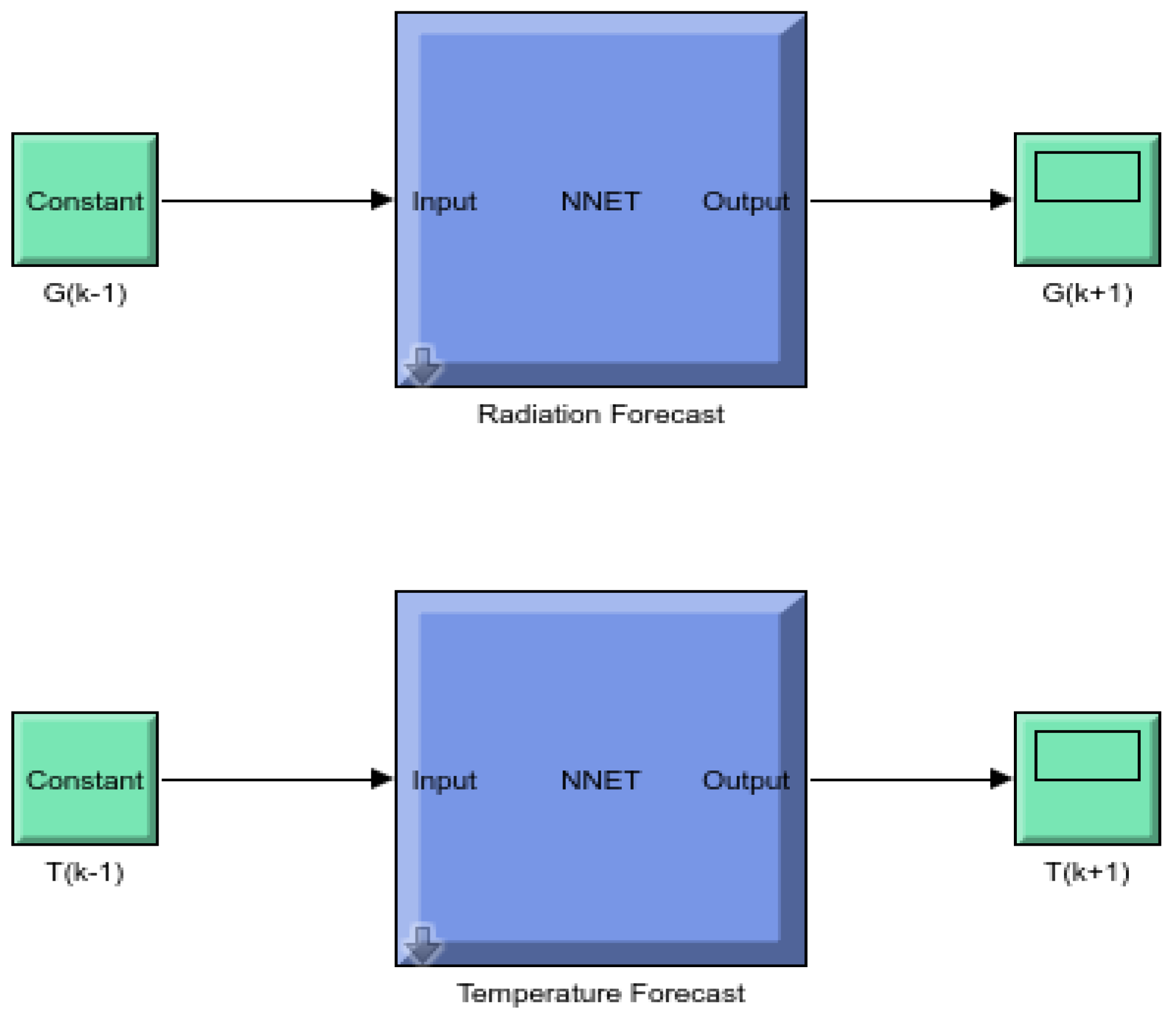
2.2. Proposed Artificial Neuro Networks Predictive Modeling
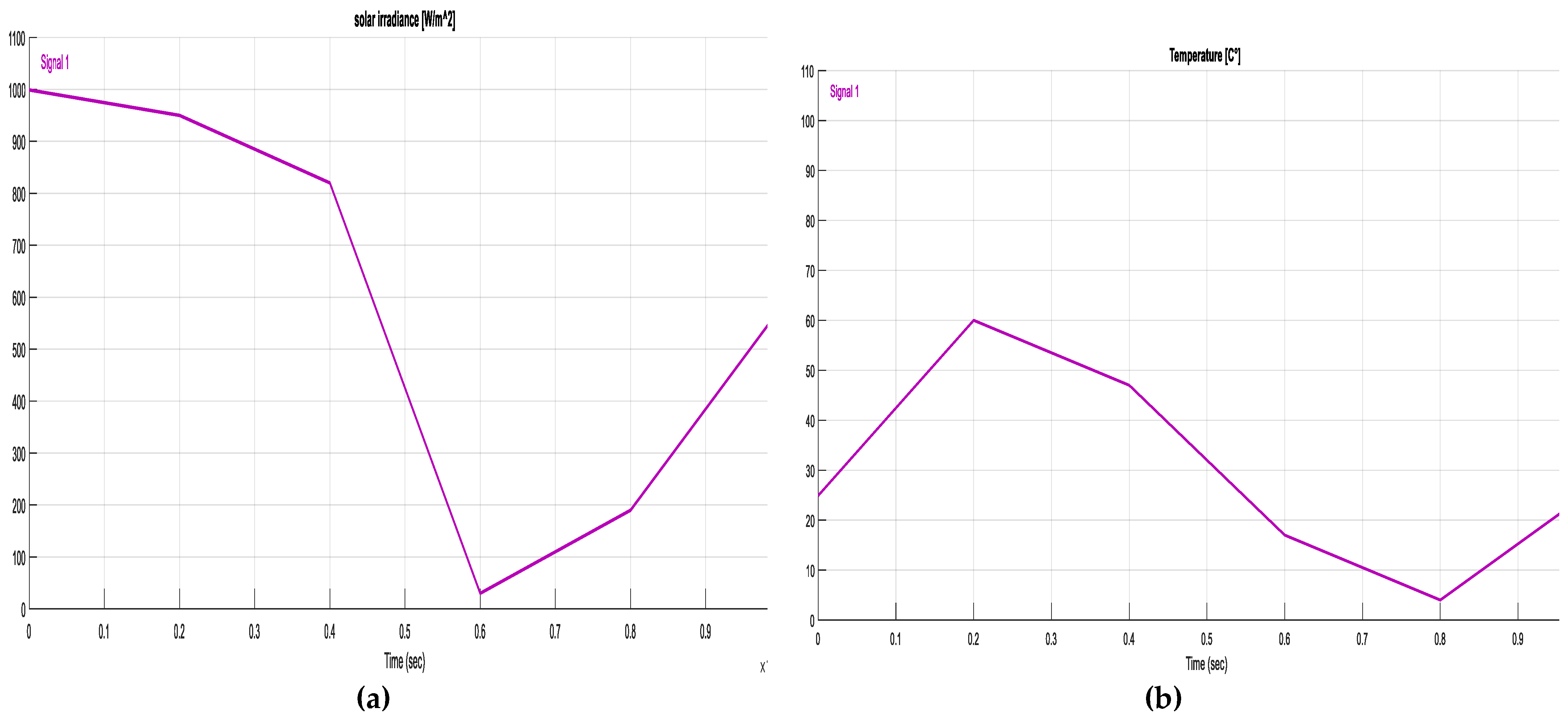
- Step1: Data assembly, pre-processing, data conversion, and normalization. The data set used to predict the temperature and solar radiation reflected on the PV under study was obtained from the Department of Systems Engineering and Automation at the Vitoria School of Engineering of the University of the Basque Country. The data was collected using the irradiance and temperature sensor Si-V-010-T [41].
- Step2: Statistical analysis.
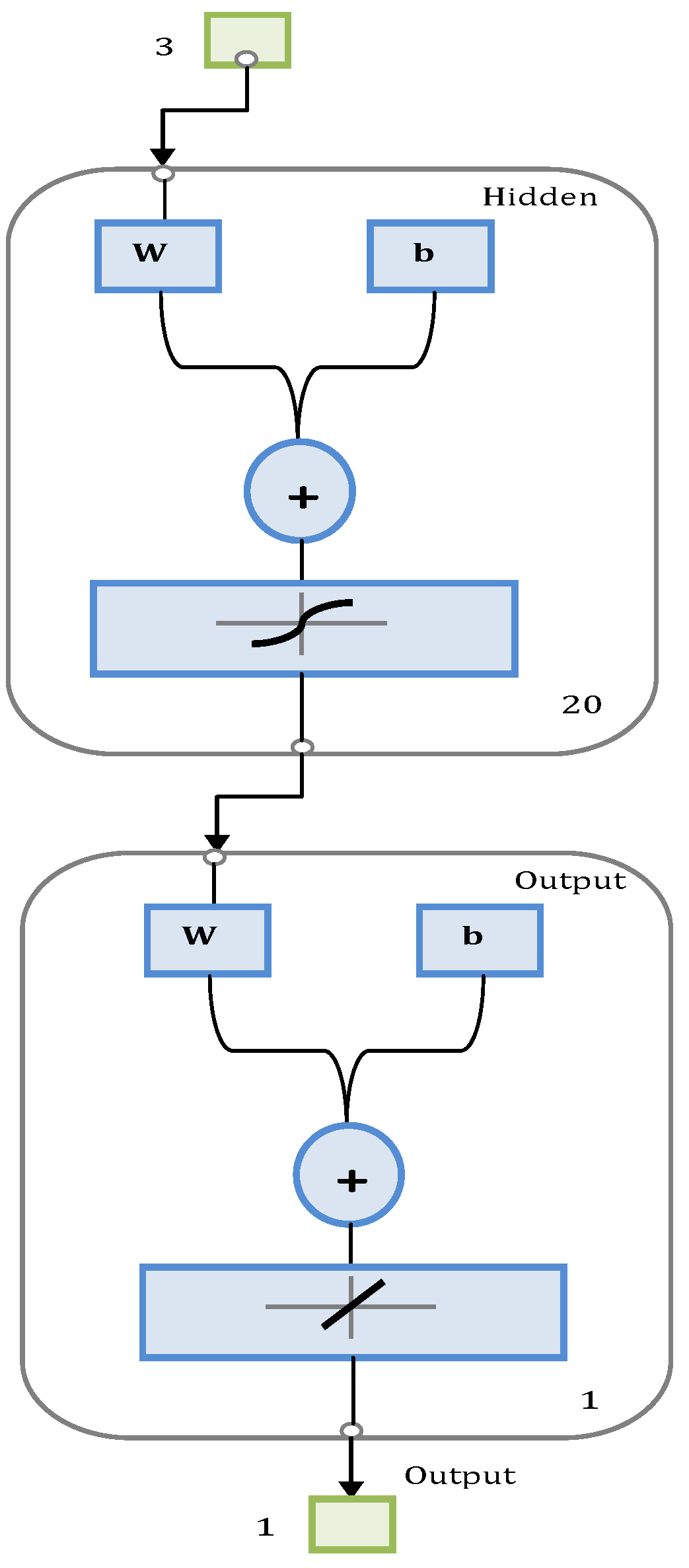
- Step3: Neural Network objects design.
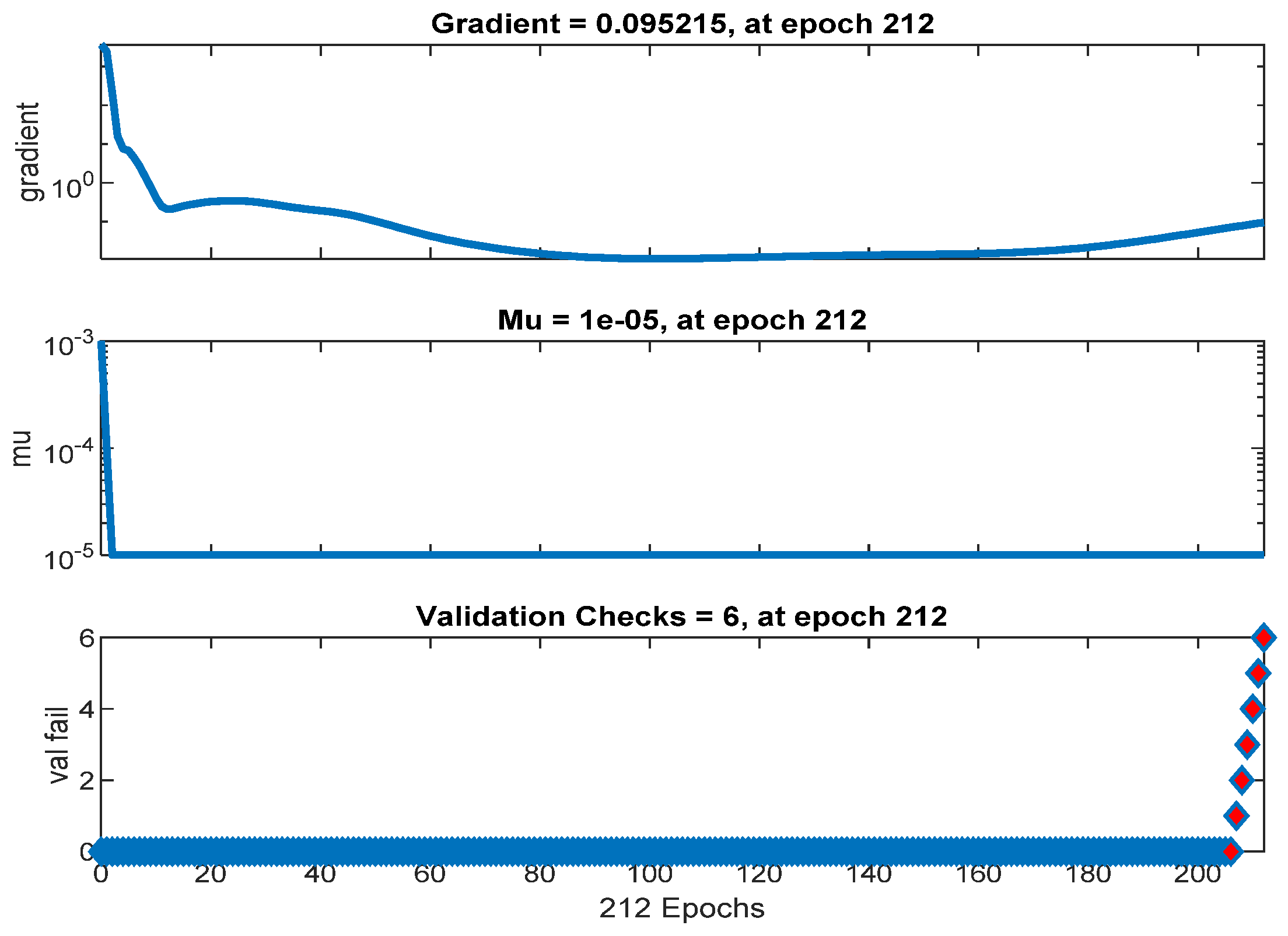
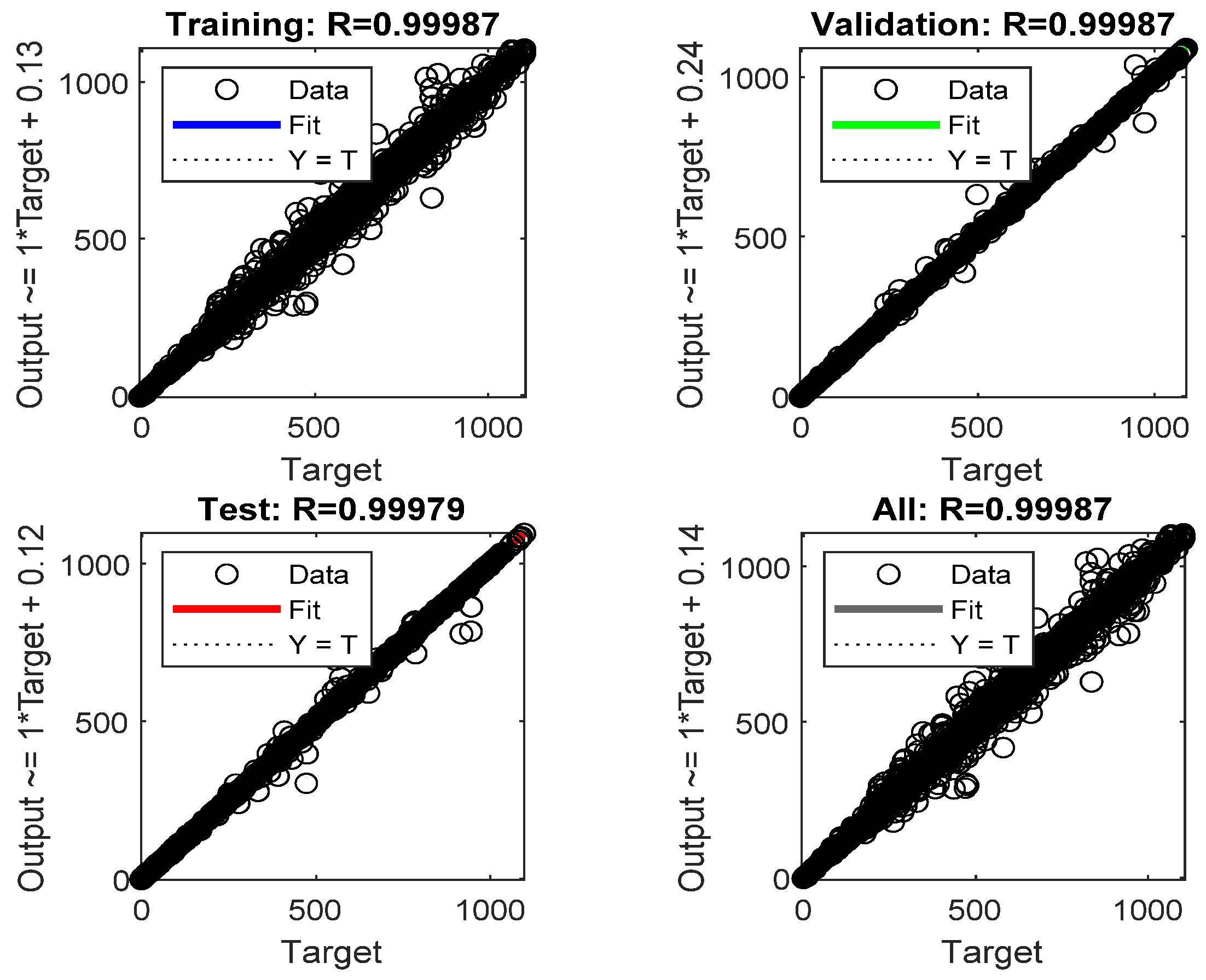
- Step4: Network training; the algorithm of Levenberg Marquardt has been used for the training of the network. This choice has been justified by the fact that this algorithm typically requires more memory but less time. The training automatically stops when the generalization stops improving, as indicated by an increase in the mean square error of the validation samples. The Mean Squared Error is the average squared difference between outputs and targets. Lower values are better, as zero means no error. This algorithm is also improving the regression, R, and it is the value measuring the correlation between outputs and targets. A unit, R, value indicates a close relationship, while 0 denotes a random relationship.
- Step5: Simulation of network response to new entries.
- Step6: Approval and testing.
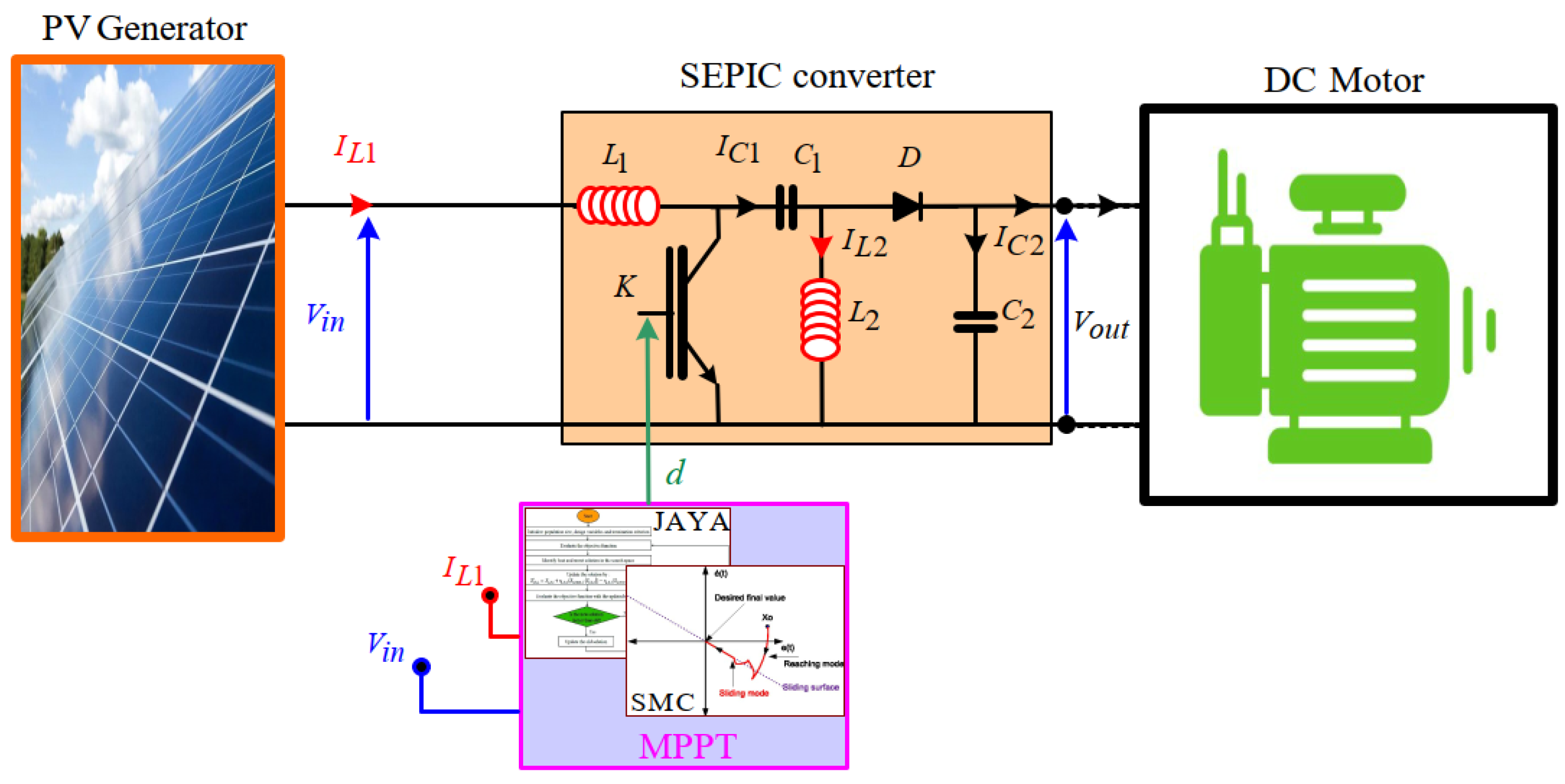
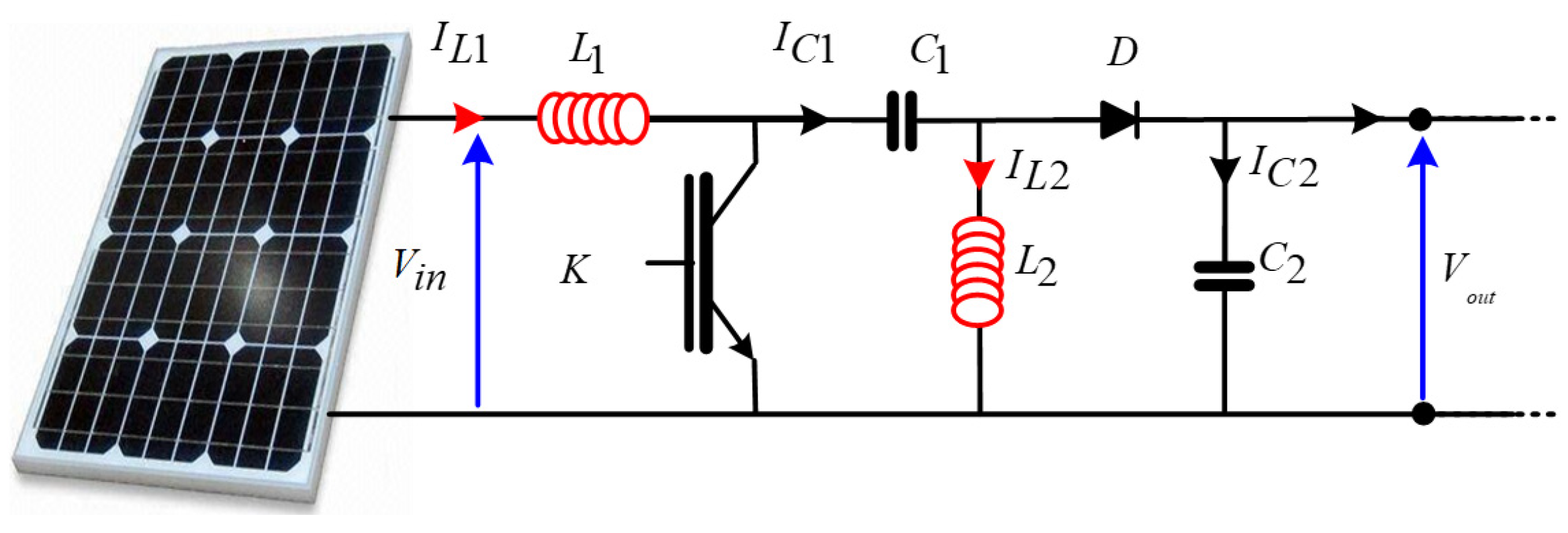
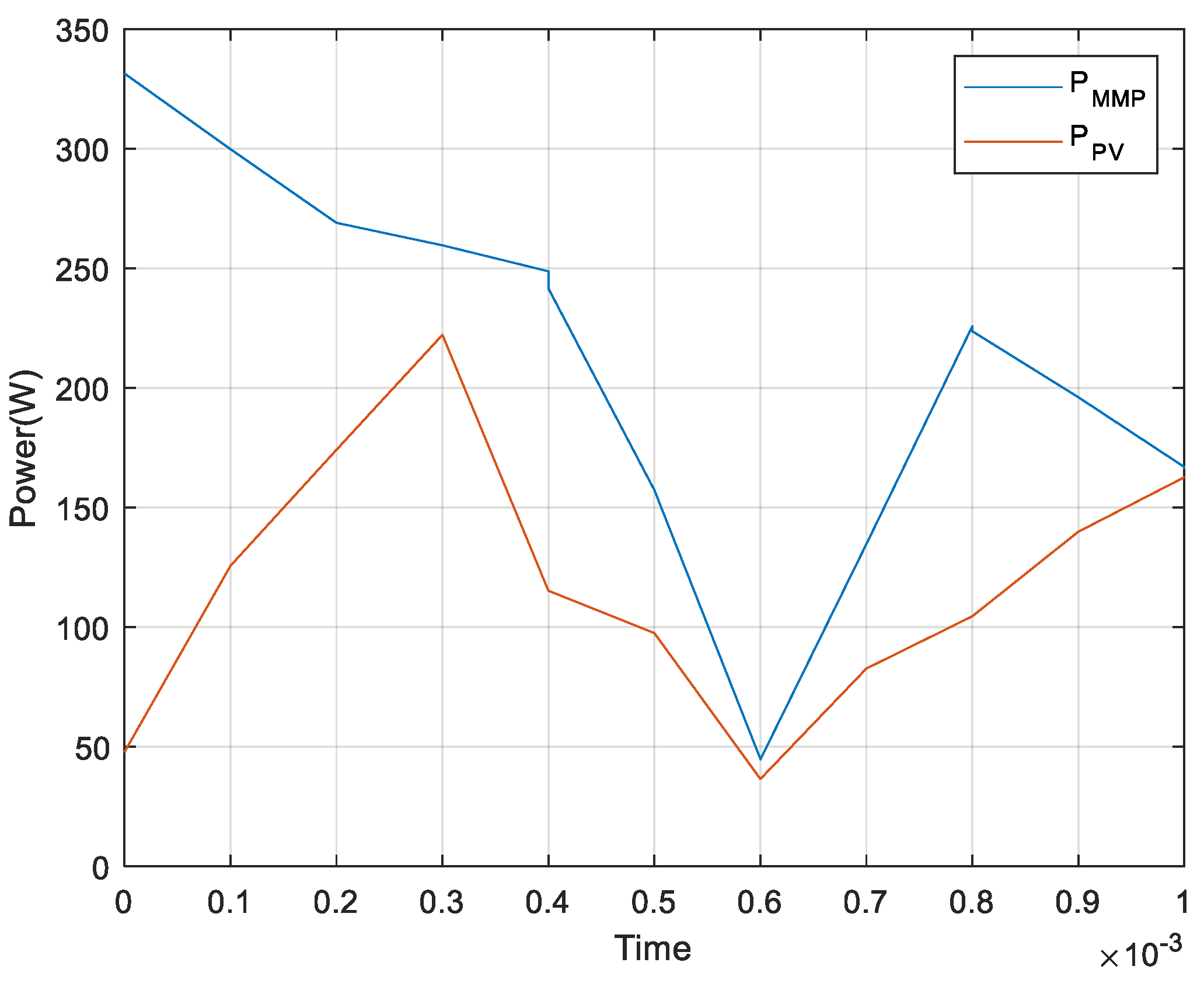
2.3. JAYA-SMC Hybrid MPPT Control of the SEPIC Chopper
2.3.1. Integrated SEPIC Chopper
2.3.2. JAYA-SMC Hybrid MPPT Control
- Jaya Method
| Algorithm 1: JAYA Algorithm |
| Step 1: Set the population and the maximum number of iterations NPop and Nmax. Step 2: Determine the Xbest andXworst solutions. Step 3: While gen <= ≤ Nmax For I = 1 to Npop carry out: Obtain the update community and evaluate the new value, if the new value is more suitable than the previous one, it will replace the old one. End for; End while. Step 4: Show existing solutions X(i) and f(X(i)). |
- 2.
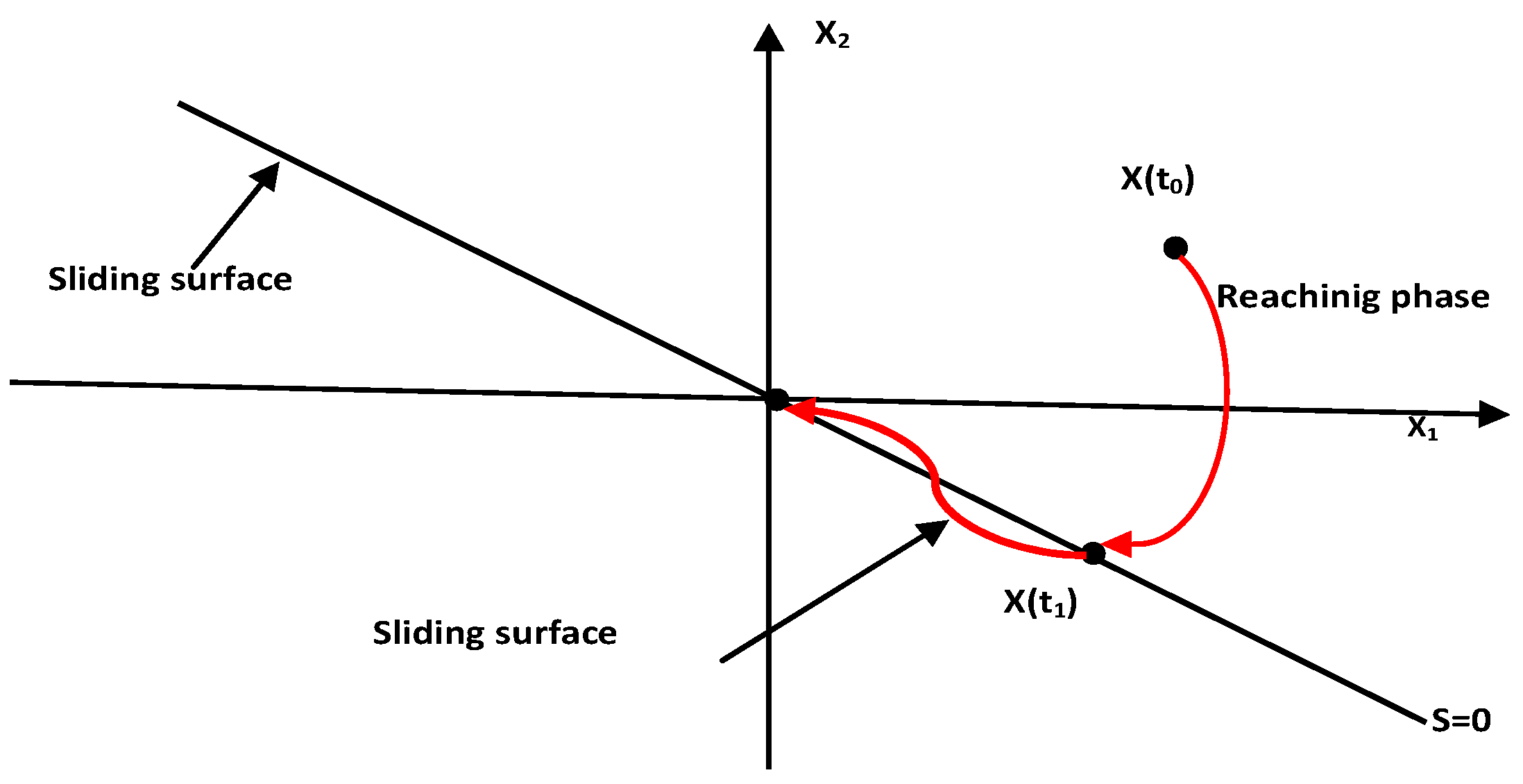
- Sliding Mode Control Technique
- First, design a sliding surface in state space.
- Have a selection of a control law to force the state trajectory of the system to move towards a predetermined surface in finite time.
- Maintain around this surface with appropriate switching logic.
3. Simulation Results and Discussion
4. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviation List
| ANN | Artificial Neural Network |
| AI | Artificial intelligence |
| NN | Neural networks |
| R | Regression |
| MSE | Mean squared error |
| MPP | Maximum power point |
| MPPT | Maximum power point tracking |
| P&O | Perturb and observe |
| Tanh | Hyperbolictangent |
| OCV | Open-circuit voltage |
| SCC | Short-circuit current |
| PVS | Photovoltaic system |
| SEPIC | Single ended primary inductor converter |
| SMC | Sliding mode control |
| mFFO | Modified fire-fly optimizer |
| FE-SVR | Feature engineering-support vector regression |
| FLC | Fuzzy logic control |
| GA | Genetic algorithm |
| PSO | Particle swarm optimization |
| CPSO | Chaotic particle swarm optimization |
| GWO | Grey wolf optimization |
| PI | Proportional integral |
| DC | Direct current |
| PID | Proportional integral derivative |
| PN | Positive negative |
| IC | Incremental conductance |
| SES | Solar energy system |
| QSVM | Quadratic support vector machine |
| CNN-BiLSTM | Convolution neural network-bi-direction long short term memory |
| ANFIS | Adaptive neuron fuzzy inference system |
| GMDH | Group method of data handling |
| ANFIS-PSO | Adaptive neuron fuzzy inference system-particle swarm optimization |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Peak Power (Pmax) | 340 W |
|---|---|
| Voltage at Pmax (Vmp) | 36.7 V |
| Current at Pmax (Imp) | 9.28 A |
| Open circuit voltage (Voc) | 45.2 V |
| Short circuit current (Isc) | 9.9 A |
Appendix B
| Frequency PWM | 55 (KHz) | 1.8 (mH) | 1.4 (mH) | ||
|---|---|---|---|---|---|
| 120 (μF) | 470 (μF) |
Appendix C
| Armature Resistance Ra | 2.2 Ω |
|---|---|
| Armature inductance La | 5 × 10−3 H |
| Back-emf constant | 0.015 V/rmp |
| Total inertia J | 0.03 kg.m2 |
| Viscous friction coefficient | 0.12 N.m.s |
| Coulomb friction torque Tf | 0.11 N.m |
| Initial speed | 3 rad/s |
References
- Yang, Y.; Sun, S. Tourism demand forecasting and tourists’ search behavior: Evidence from segmented Baidu search volume. Data Sci. Manag. 2021, 4, 1–9. [Google Scholar] [CrossRef]
- Zhidan, L.; Wei, G.; Qingfu, L.; Zhengjun, Z. A hybrid model for financial time-series forecasting based on mixed methodologies. Expert Syst. 2021, 38, e12633. [Google Scholar] [CrossRef]
- Gourvenec, S.; Sturt, F.; Reid, E.; Trigos, F. Global assessment of historical, current and forecast ocean energy infrastructure: Implications for marine space planning, sustainable design and end-of-engineered-life management. Renew. Sustain. Energy Rev. 2022, 154, 111794. [Google Scholar] [CrossRef]
- Acharya, S.; Young-Min, W.; Jaehee, L. Day-ahead forecasting for small-scale photovoltaic power based on similar day detection with selective weather variables. Electronics 2020, 9, 1117. [Google Scholar] [CrossRef]
- Ellahi, M.; Usman, M.R.; Arif, W.; Usman, H.F.; Khan, W.A.; Satrya, G.B.; Daniel, K.; Shabbir, N. Forecasting of Wind Speed and Power through FFNN and CFNN Using HPSOBA and MHPSOBAACs Techniques. Electronics 2022, 11, 4193. [Google Scholar] [CrossRef]
- Boretti, A. Integration of solar thermal and photovoltaic, wind, and battery energy storage through AI in NEOM city. Energy AI 2021, 3, 100038. [Google Scholar] [CrossRef]
- Raju Pendem, S.; Mikkili, S.; Rangarajan, S.S.; Avv, S.; Collins, R.E.; Senjyu, T. Optimal hybrid PV array topologies to maximize the power output by reducing the effect of non-uniform operating conditions. Electronics 2021, 10, 3014. [Google Scholar] [CrossRef]
- Schleifer, A.H.; Murphy, C.A.; Cole, W.J.; Denholm, P.L. The evolving energy and capacity values of utility-scale PV-plus-battery hybrid system architectures. Adv. Appl. Energy 2021, 2, 100015. [Google Scholar] [CrossRef]
- Hafeez, G.; Imran Khan, I.; Jan, J.; Shah, I.A.; Farrukh, A.F.; Derhab, A. A novel hybrid load forecasting framework with intelligent feature engineering and optimization algorithm in smart grid. Appl. Energy 2021, 299, 117178. [Google Scholar] [CrossRef]
- Mukhatov, A.; Thao, N.G.M.; Do, T.D. Linear Quadratic Regulator and Fuzzy Control for Grid-Connected Photovoltaic Systems. Energies 2022, 15, 1286. [Google Scholar] [CrossRef]
- Pande, J.; Nasikkar, P.; Kotecha, K.; Varadarajan, V. A review of maximum power point tracking algorithms for wind energy conversion systems. J. Mar. Sci. Eng. 2021, 9, 1187. [Google Scholar] [CrossRef]
- Verma, P.; Alam, A.; Sarwar, A.; Tariq, M.; Vahedi, H.; Gupta, D.; Shah Noor Mohamed, A. Meta-heuristic optimization techniques used for maximum power point tracking in solar pv system. Electronics 2022, 10, 2419. [Google Scholar] [CrossRef]
- González-Castaño, C.; Restrepo, C.; Kouro, S.; Rodriguez, J. MPPT algorithm based on artificial bee colony for PV system. IEEE Access 2021, 9, 43121–43133. [Google Scholar] [CrossRef]
- Ortiz Valencia, P.A.; Ramos-Paja, C.A. Sliding-mode controller for maximum power point tracking in grid-connected photovoltaic systems. Energies 2015, 8, 12363–12387. [Google Scholar] [CrossRef] [Green Version]
- Abbes, H.; Abid, H.; Loukil, K.; Toumi, A.; Abid, M. Etude comparative de cinq algorithmes de commande MPPT pour un système photovoltaïque. J. Renew. Energ. 2014, 17, 435–445. [Google Scholar]
- Marinić-Kragić, I.; Nižetić, S.; Grubišić-Čabo, F.; Papadopoulos, A.M. Analysis of flow separation effect in the case of the free-standing photovoltaic panel exposed to various operating conditions. J. Clean. Prod. 2018, 174, 53–64. [Google Scholar] [CrossRef]
- Gaur, P.; Verma, Y.P.; Singh, P. Maximum power point tracking algorithms for photovoltaic applications: A comparative study. In Proceedings of the 2nd International Conference on Recent Advances in Engineering & Computational Sciences (RAECS), Chandigarh, India, 21–22 December 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Enany, M.A.; Farahat, M.A.; Nasr, A. Modeling and evaluation of main maximum power point tracking algorithms for photovoltaics systems. Renew. Sustain. Energy Rev. 2016, 58, 1578–1586. [Google Scholar] [CrossRef]
- Bhatnagar, P.; Nema, R.K. Maximum power point tracking control techniques: State-of-the-art in photovoltaic applications. Renew. Sustain. Energy Rev. 2013, 23, 224–241. [Google Scholar] [CrossRef]
- Nelatury, S.R.; Gray, R. A maximum power point tracking algorithm for photovoltaic applications. In Proceedings of the Energy Harvesting and Storage: Materials, Devices, and Applications IV, Baltimore, MD, USA, 28 May 2013. [Google Scholar] [CrossRef]
- Mohamed, S.A.; Abd El Sattar, M. A comparative study of P&O and INC maximum power point tracking techniques for grid-connected PV systems. SN Appl. Sci. 2019, 1, 174. [Google Scholar] [CrossRef] [Green Version]
- García, E.; Ponluisa, N.; Quiles, E.; Zotovic-Stanisic, R.; Gutiérrez, S.C. Solar panels string predictive and parametric fault diagnosis using low-cost sensors. Sensors 2022, 22, 332. [Google Scholar] [CrossRef]
- Abid, A.J.; Al-Naima, F.M. A Photovoltaic Measurement System for Performance Evaluation and Faults Detection at the Field. Int. J. Autom. Smart Technol. 2020, 10, 409–420. [Google Scholar] [CrossRef]
- Yilmaz, U.; Kircay, A.; Borekci, S. PV system fuzzy logic MPPT method and PI control as a charge controller. Renew. Sustain. Energy Rev. 2018, 81, 994–1001. [Google Scholar] [CrossRef]
- Seguel, J.L.; Seleme, S.I., Jr.; Morais, L.M. Comparative Study of Buck-Boost, SEPIC, Cuk and Zeta DC-DC Converters Using Different MPPT Methods for Photovoltaic Applications. Energies 2022, 15, 7936. [Google Scholar] [CrossRef]
- Rahman, C.M.; Rashid, T.A. A new evolutionary algorithm: Learner performance based behavior algorithm. Egypt. Inform. J. 2021, 22, 213–223. [Google Scholar] [CrossRef]
- Kumar, A.; Bawa, S. A comparative review of meta-heuristic approaches to optimize the SLA violation costs for dynamic execution of cloud services. Soft Comput. 2020, 24, 3909–3922. [Google Scholar] [CrossRef]
- Jlidi, M.; Hamidi, F.; Abdelkrim, M.N.; Jerbi, H.; Abbassi, R.; Kchaou, M. Synthesis of an Advanced Maximum Power Point Tracking Method for a Photovoltaic System: A Chaotic Jaya Logistic Approach. In Proceedings of the 4th International Conference on Applied Automation and Industrial Diagnostics (ICAAID), Hail, Saudi Arabia, 29–31 March 2022. [Google Scholar] [CrossRef]
- Rao, R. Jaya: A simple and new optimization algorithm for solving constrained and unconstrained optimization problems. Int. J. Ind. Eng. Comput. 2016, 7, 19–34. [Google Scholar] [CrossRef]
- Alghamdi, A.S. A Hybrid Firefly–JAYA Algorithm for the Optimal Power Flow Problem Considering Wind and Solar Power Generations. Appl. Sci. 2022, 12, 7193. [Google Scholar] [CrossRef]
- Zitar, R.A.; Al-Betar, M.A.; Awadallah, M.A.; Doush, I.A.; Assaleh, K. An intensive and comprehensive overview of JAYA algorithm, its versions and applications. Arch. Comput. Methods Eng. 2022, 29, 763–792. [Google Scholar] [CrossRef]
- Mohammad, M.; Abbassi, R.; Jerbi, H.; Waly, A.F.; Abdalqadir, A.H.; Rezvani, A. A new MPPT design using variable step size perturb and observe method for PV system under partially shaded conditions by modified shuffled frog leaping algorithm- SMC controller. Sustain. Energy Technol. Assess. 2021, 45, 101056. [Google Scholar] [CrossRef]
- Hamidi, F.; Olteanu, S.C.; Gliga, L.I. Gradient Optimization Methods for Maximum Power Point Tracking in Photovoltaic Panels. In Proceedings of the 15th European Workshop on Advanced Control and Diagnosis, Online ISBN, 14 June 2022. [Google Scholar] [CrossRef]
- Hamidi, F.; Olteanu, S.C.; Popescu, D.; Jerbi, H.; Dincă, I.; Ben Aoun, S.; Abbassi, R. Model Based Optimisation Algorithm for Maximum Power Point Tracking in Photovoltaic Panels. Energies 2020, 13, 4798. [Google Scholar] [CrossRef]
- Zhang, Y.; Lundblad, A.; Campana, P.E.; Yan, J. Comparative study of battery storage and hydrogen storage to increase photovoltaic self-sufficiency in a residential building of Sweden. Energy Procedia 2016, 103, 268–273. [Google Scholar] [CrossRef]
- Yue, M.; Lambert, H.; Pahon, E.; Roche, R.; Jemei, S.; Hissel, D. Hydrogen energy systems: A critical review of technologies, applications, trends and challenges. Renew. Sustain. Energy Rev. 2021, 146, 111180. [Google Scholar] [CrossRef]
- Petkov, I.; Gabrielli, P. Power-to-hydrogen as seasonal energy storage: An uncertainty analysis for optimal design of low-carbon multi-energy systems. Appl. Energy 2020, 274, 115197. [Google Scholar] [CrossRef]
- Lei, Q.; Wang, B.; Wang, P.; Liu, S. Hydrogen generation with acid/alkaline amphoteric water electrolysis. J. Energy Chem. 2019, 38, 162–169. [Google Scholar] [CrossRef] [Green Version]
- Escamilla-García, A.; Soto-Zarazúa, G.M.; Toledano-Ayala, M.; Rivas-Araiza, E.; Gastélum-Barrios, A. Applications of artificial neural networks in greenhouse technology and overview for smart agriculture development. Appl. Sci. 2020, 10, 3835. [Google Scholar] [CrossRef]
- Huang, J.C.; Ko, K.M.; Shu, M.H.; Hsu, B.M. Application and comparison of several machine learning algorithms and their integration models in regression problems. Neural Comput. Appl. 2020, 32, 5461–5469. [Google Scholar] [CrossRef]
- Available online: https://www.meteocontrol.com/fileadmin/Daten/Dokumente/ES/1_Photovoltaik_Monitoring/Accesorios/Sensores/Irradiaci%C3%B3n/Sensores_de_radiaci%C3%B3n_solar_de_silicio/DB_Irradiance_sensor_Si-Series_en.pdf (accessed on 12 November 2022).
- Sajjad, U.; Hussain, I.; Raza, W.; Sultan, M.; Alarifi, I.M.; Wang, C.-C. On the Critical Heat Flux Assessment of Micro- and Nanoscale Roughened Surfaces. Nanomaterials 2022, 12, 3256. [Google Scholar] [CrossRef]
- Gaspar, A.; Oliva, D.; Cuevas, E.; Zaldívar, D.; Pérez, M.; Pajares, G. Hyperparameter Optimization in a Convolutional Neural Network Using Metaheuristic Algorithms. In Metaheuristics in Machine Learning: Theory and Applications; Oliva, D., Houssein, E.H., Hinojosa, S., Eds.; Studies in Computational Intelligence; Springer: Cham, Switzerlands, 2021; Volume 967. [Google Scholar] [CrossRef]
- Sajjad, U.; Hussain, I.; Hamid, K.; Muhammad, A.H.; Wang, W.; Yan, W. Liquid-to-vapor phase change heat transfer evaluation and parameter sensitivity analysis of nanoporous surface coatings. Int. J. Heat Mass Transf. 2022, 94, 123088. [Google Scholar] [CrossRef]
- Chen, Z.; Francis, A.; Li, S.; Liao, B.; Xiao, D.; Ha, T.T.; Cao, X. Egret Swarm Optimization Algorithm: An Evolutionary Computation Approach for Model Free Optimization. Biomimetics 2022, 7, 144. Available online: https://sciprofiles.com/profile/1993400 (accessed on 2 November 2022). [CrossRef]
- Hamidi, F.; Aloui, M.; Jerbi, H.; Kchaou, M.; Abbassi, R.; Popescu, D.; Dimon, C. Chaotic particle swarm optimisation for enlarging the domain of attraction of polynomial nonlinear systems. Electronics 2020, 9, 1704. [Google Scholar] [CrossRef]
- Rabeh, A.; Abdelkader, A.; Ali, A.H.; Seyedali, M. An efficient salp swarm-inspired algorithm for parameters identification of photovoltaic cell models. Energy Convers. Manag. 2019, 179, 362–372. [Google Scholar] [CrossRef]
- Zeb, K.; Islam, S.U.; Din, W.U.; Khan, I.; Ishfaq, M.; Busarello, T.D.C.; Kim, H.J. Design of fuzzy-PI and fuzzy-sliding mode controllers for single-phase two-stages grid-connected transformerless photovoltaic inverter. Electronics 2019, 8, 520. [Google Scholar] [CrossRef] [Green Version]
- Karami-Mollaee, A.; Barambones, O. Dynamic Sliding Mode Control of DC-DC Converter to Extract the Maximum Power of Photovoltaic System Using Dual Sliding Observer. Electronics 2022, 11, 2506. [Google Scholar] [CrossRef]
- Velasco, J.; Calvo, I.; Barambones, O.; Venegas, P.; Napole, C. Experimental validation of a sliding mode control for a stewart platform used in aerospace inspection applications. Mathematics 2020, 8, 2051. [Google Scholar] [CrossRef]
- Kabilan, R.; Chandran, V.; Yogapriya, J.; Karthick, A.; Gandhi, P.P.; Mohanavel, V.; Manoharan, S. Short-term power prediction of building integrated photovoltaic (BIPV) system based on machine learning algorithms. Int. J. Photoenergy 2021, 2021, 5582418. [Google Scholar] [CrossRef]
- Rai, A.; Shrivastava, A.; Jana, K.C. A CNN-BiLSTM based deep learning model for mid-term solar radiation prediction. Int. Trans. Electr. Energy Syst. 2021, 31, e12664. [Google Scholar] [CrossRef]
- Kaba, K.; Sarıgül, M.; Avcı, M.; Kandırmaz, H.M. Estimation of daily global solar radiation using deep learning model. Energy 2018, 162, 126–135. [Google Scholar] [CrossRef]
- Olatomiwa, L.; Mekhilef, S.; Shamshirband, S.; Petković, D. Adaptive neuro-fuzzy approach for solar radiation prediction in Nigeria. Renew. Sustain. Energy Rev. 2015, 51, 1784–1791. [Google Scholar] [CrossRef]
- Khosravi, A.; Nunes, R.O.; Assad, M.E.H.; Machado, L. Comparison of artificial intelligence methods in estimation of daily global solar radiation. J. Clean. Prod. 2018, 194, 342–358. [Google Scholar] [CrossRef]
- Halabi, L.M.; Mekhilef, S.; Hossain, M. Performance evaluation of hybrid adaptive neuro-fuzzy inference system models for predicting monthly global solar radiation. Appl. Energy 2018, 213, 247–261. [Google Scholar] [CrossRef]

























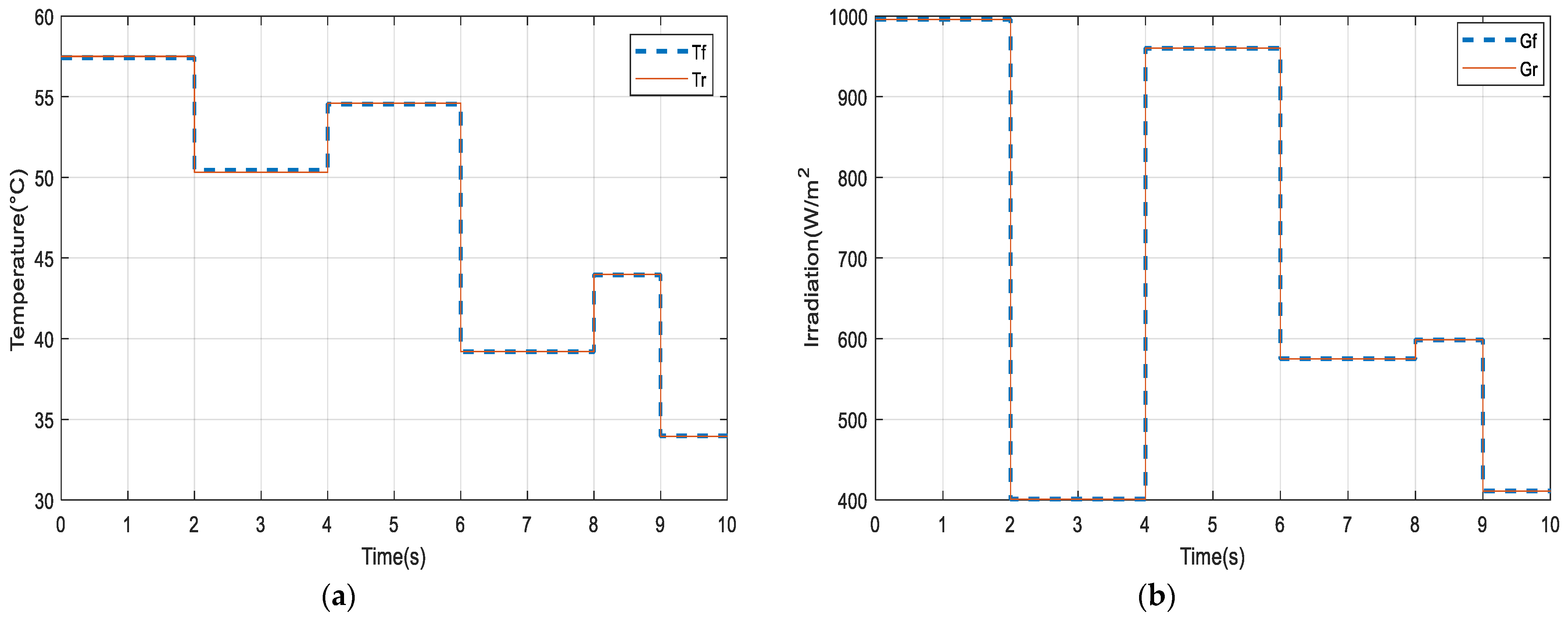
| Inputs | Real Temperature | Forecasted Temperature | Error |
|---|---|---|---|
| (54.43;54.50;54.54) | 54.59 | 54.58 | 0.01 |
| (26.15;26.15;26.06) | 25.96 | 26.00 | 0.04 |
| (59.86;59.76;59.91) | 60.08 | 60.09 | 0.01 |
| Input | Real Irradiation | Forecasted Irradiation | Error |
|---|---|---|---|
| (959.28;960.38;961.85) | 962.58 | 962.71 | 0.13 |
| (548.03;547.66;546.75) | 545.65 | 546.1 | 0.45 |
| (877.25;877.80;877.80) | 876.70 | 877.38 | 0.68 |
| Ref. | Studied System | Model | Main Objective | Degree of Complexity | MSE | R2 |
|---|---|---|---|---|---|---|
| [51] | PVS | QSVM | Short-term energy forecasting for building integrated PV system | High | 0.16 | 0.88 |
| PVS | Decision Tree | High | 0.087 | 0.88 | ||
| [52] | Solar radiation-based power plants | CNN-BiLSTM | Midterm solar radiation prediction | High | 0.17 | 0.94 |
| [53] | Meteorological ground stations | DL | Estimation of daily solar radiation | High | 0.6 | 0.98 |
| [54] | Meteorologicalstation | ANFIS | Predict solar radiation | Low | 1.16 | 0.85 |
| [55] | SES | GMDH | Estimation of daily global solar radiation | Medium | 0.05 | 0.98 |
| [56] | SES | ANFIS-PSO | Monthly solar radiation prediction | High | 0.09 | 0.99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jlidi, M.; Hamidi, F.; Barambones, O.; Abbassi, R.; Jerbi, H.; Aoun, M.; Karami-Mollaee, A. An Artificial Neural Network for Solar Energy Prediction and Control Using Jaya-SMC. Electronics 2023, 12, 592. https://doi.org/10.3390/electronics12030592
Jlidi M, Hamidi F, Barambones O, Abbassi R, Jerbi H, Aoun M, Karami-Mollaee A. An Artificial Neural Network for Solar Energy Prediction and Control Using Jaya-SMC. Electronics. 2023; 12(3):592. https://doi.org/10.3390/electronics12030592
Chicago/Turabian StyleJlidi, Mokhtar, Faiçal Hamidi, Oscar Barambones, Rabeh Abbassi, Houssem Jerbi, Mohamed Aoun, and Ali Karami-Mollaee. 2023. "An Artificial Neural Network for Solar Energy Prediction and Control Using Jaya-SMC" Electronics 12, no. 3: 592. https://doi.org/10.3390/electronics12030592