
Deep-Learning-Based Recovery of Frequency-Hopping Sequences for Anti-Jamming Applications

Abstract
:1. Introduction
- (1)
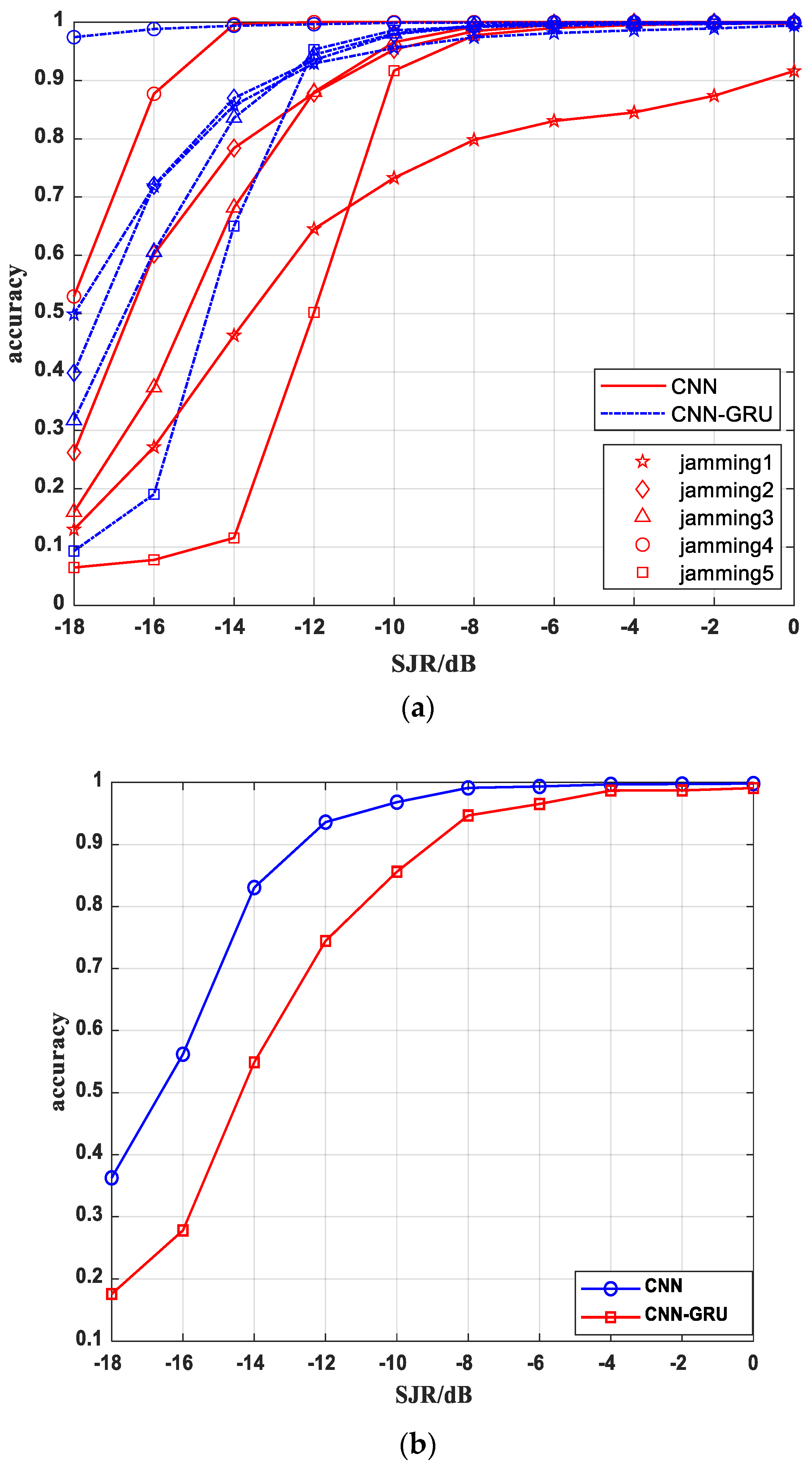
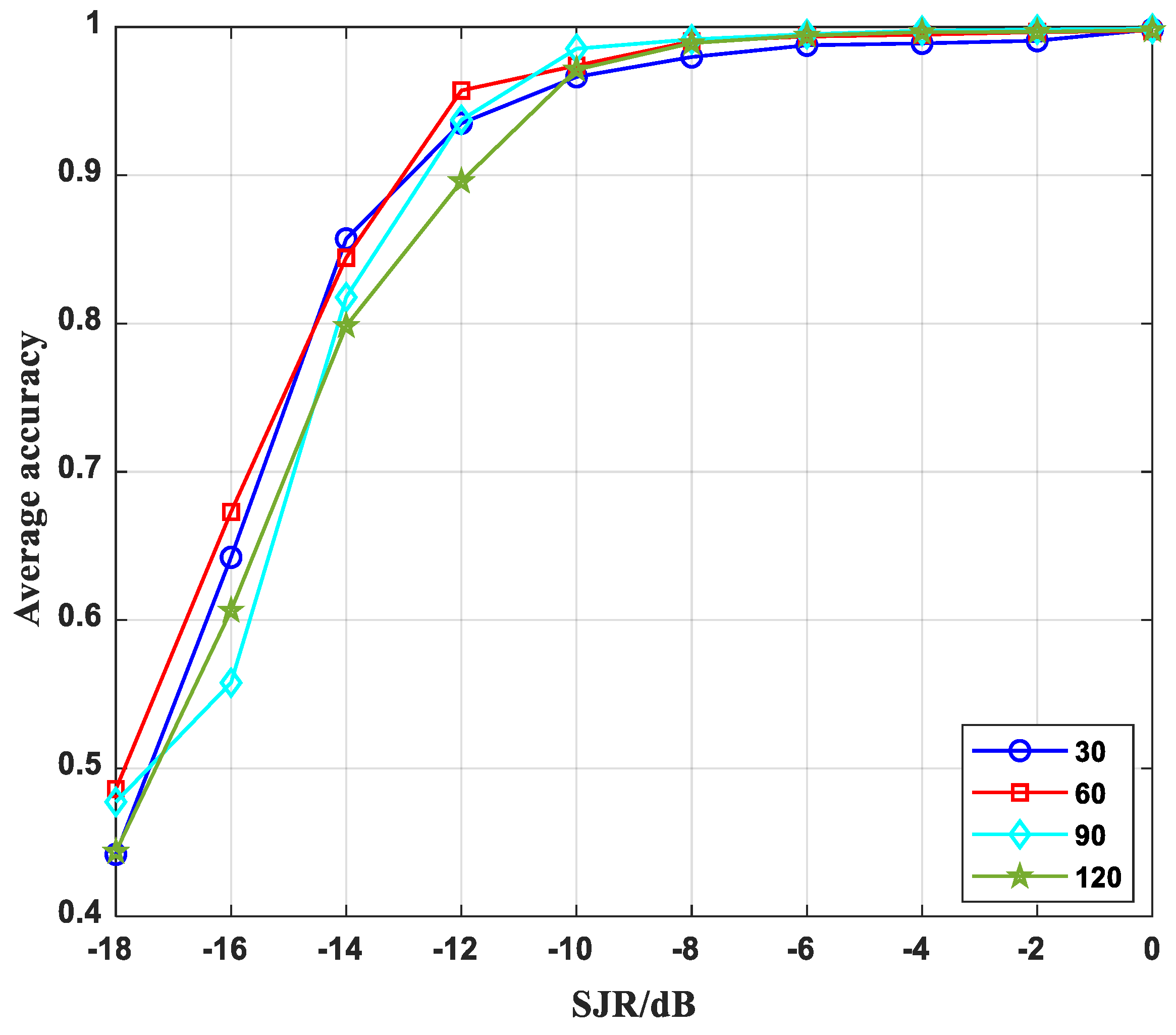
- We propose a deep-learning-based recovery method of frequency-hopping sequences. In the proposed method, we used the short-time Fourier transform (STFT) diagram of the received frequency-hopping signal as the input of the network. We designed a hybrid CNN and GRU network architecture for learning and adaptation to variant signal input length. The combination of the two networks ensured the accuracy of frequency-hopping sequence estimation under a complex electromagnetic environment. Simulation results showed that in both the single and mixed jamming scenarios, the proposed method achieved high accuracy in estimating the frequency-hopping sequences.
- (2)
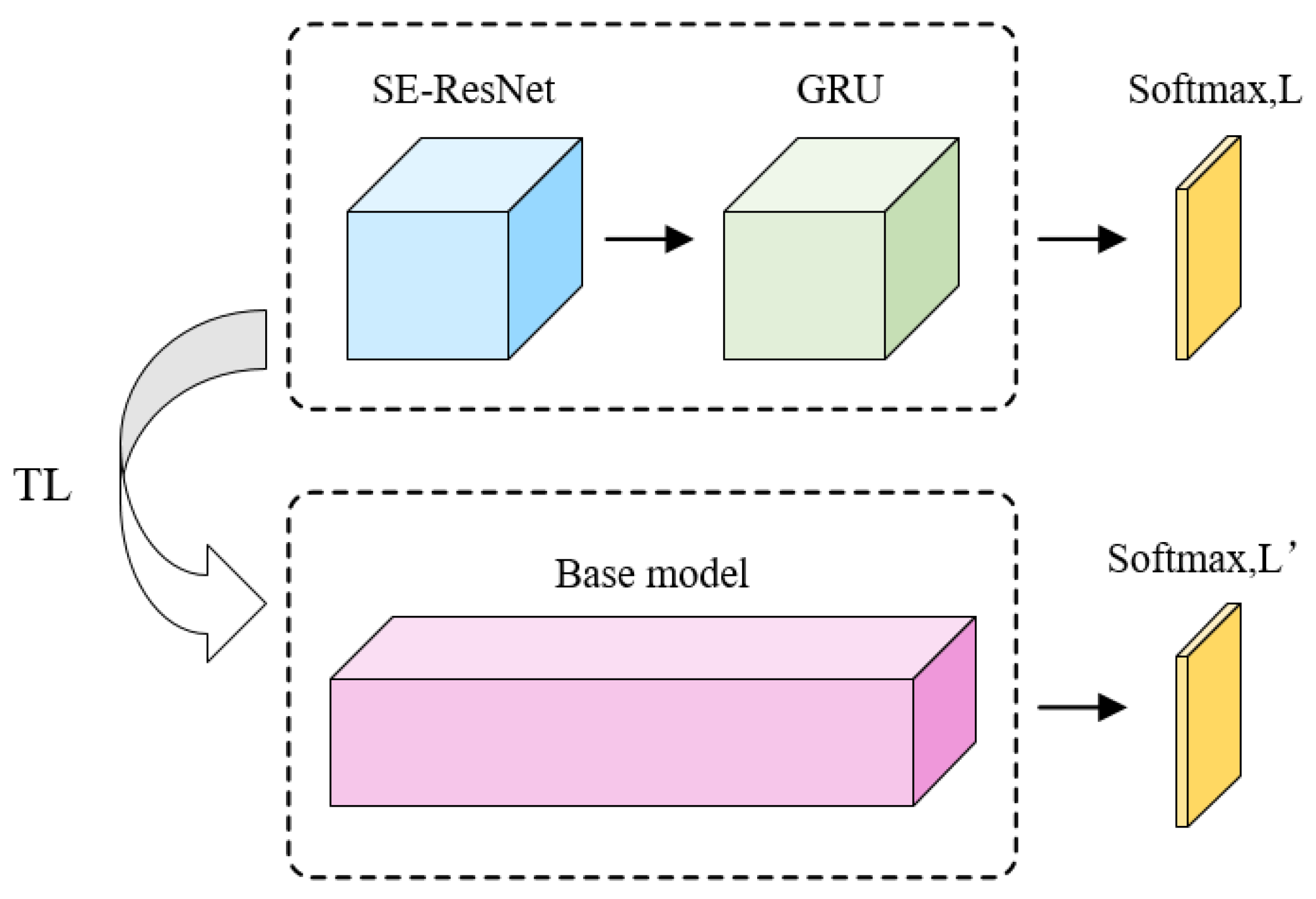
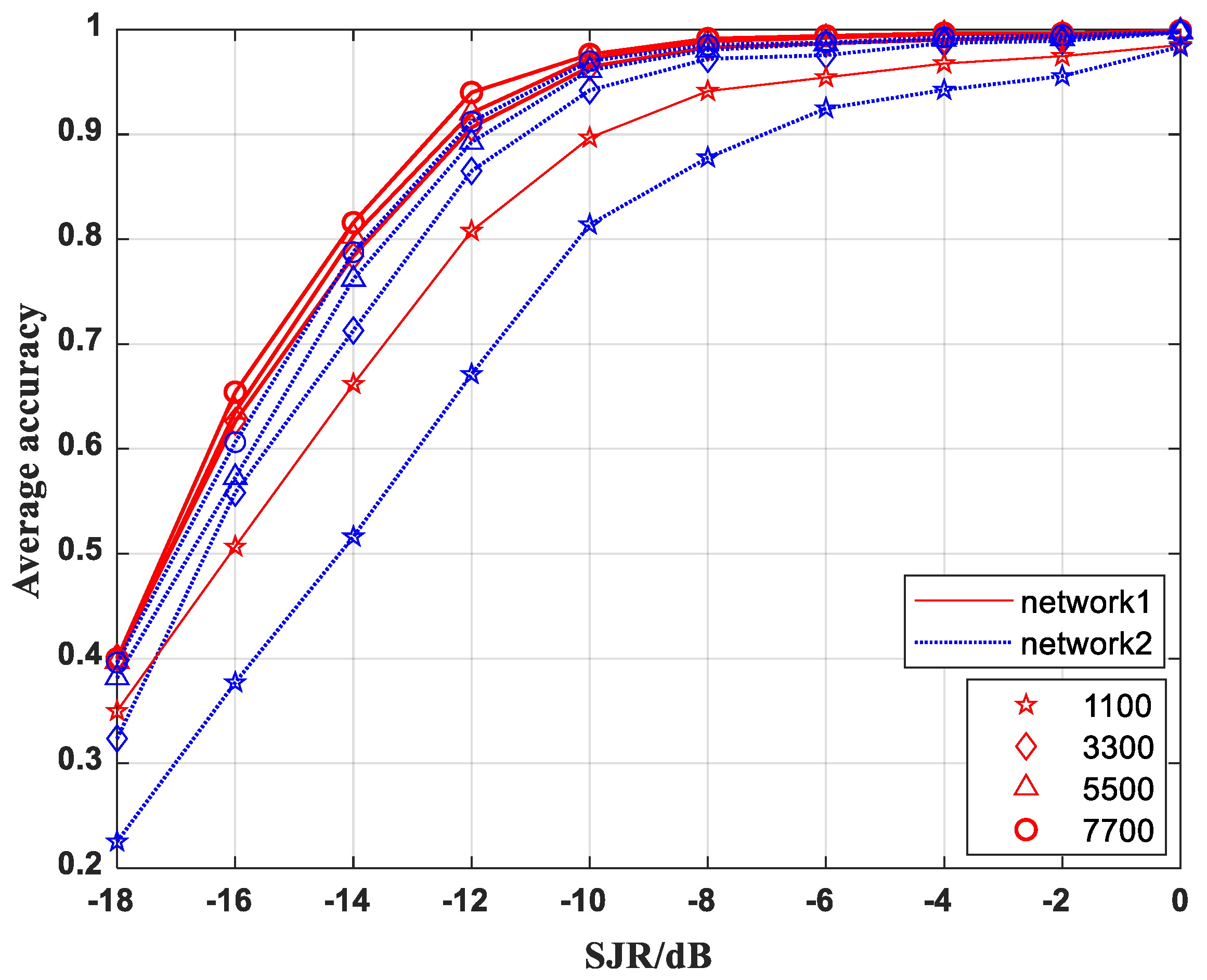
- We used transfer learning to deal with new frequency-hopping systems with different frequency-hopping sets. We changed the last fully connected layer of the network so as to make the size of its output dimension correspond to the number of frequency points of the new frequency-hopping system. The simulation results showed that with transfer learning, the number of training samples could be reduced to a large extent.
- (3)
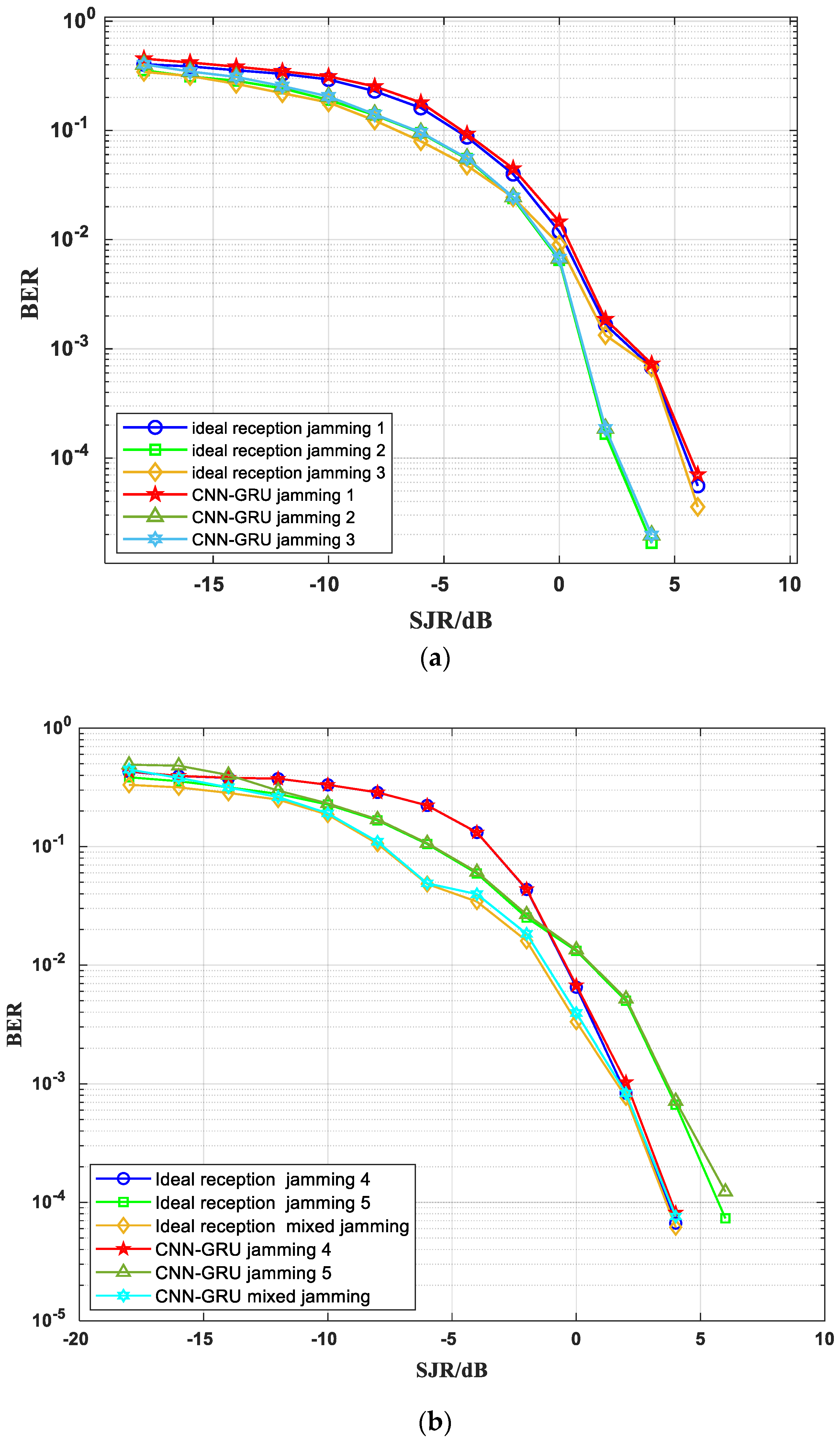
- We analyzed the BER performance of the frequency-hopping system. Our results showed that the BER performance of the proposed hybrid network was close to that of the frequency-hopping receiving system under ideal conditions, in both the single and mixed jamming environments.
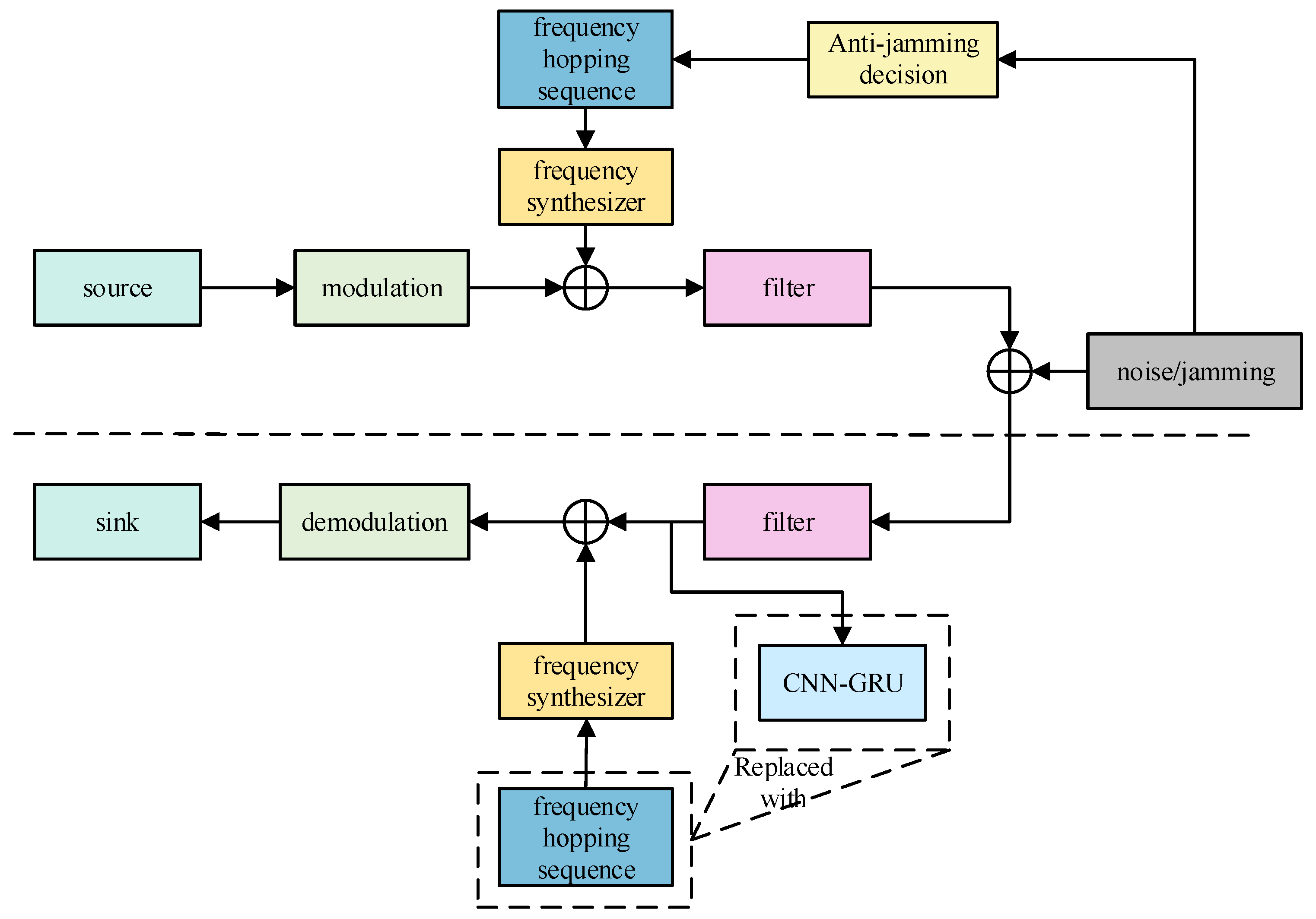
2. System Model
3. Proposed FH Sequence Recovery Method
3.1. Overall Framework
3.2. Input Data Format
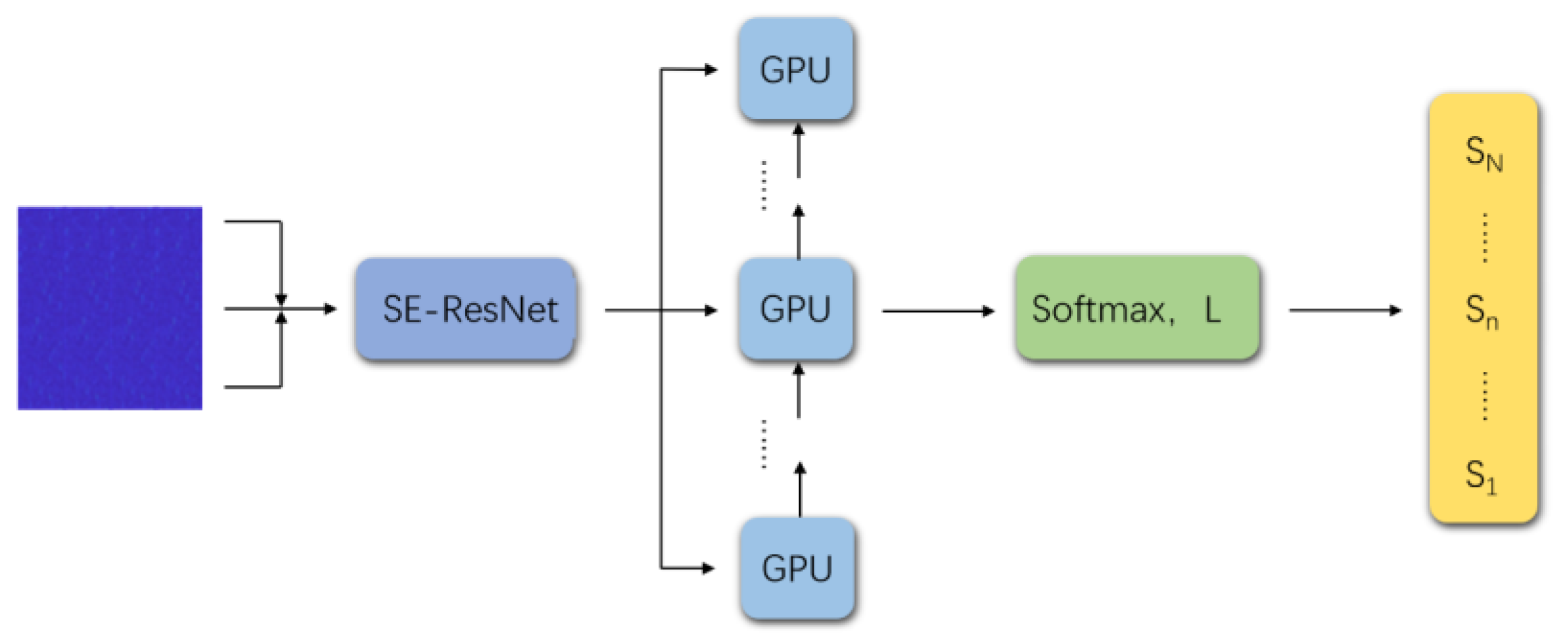
3.3. Designed Network Structure
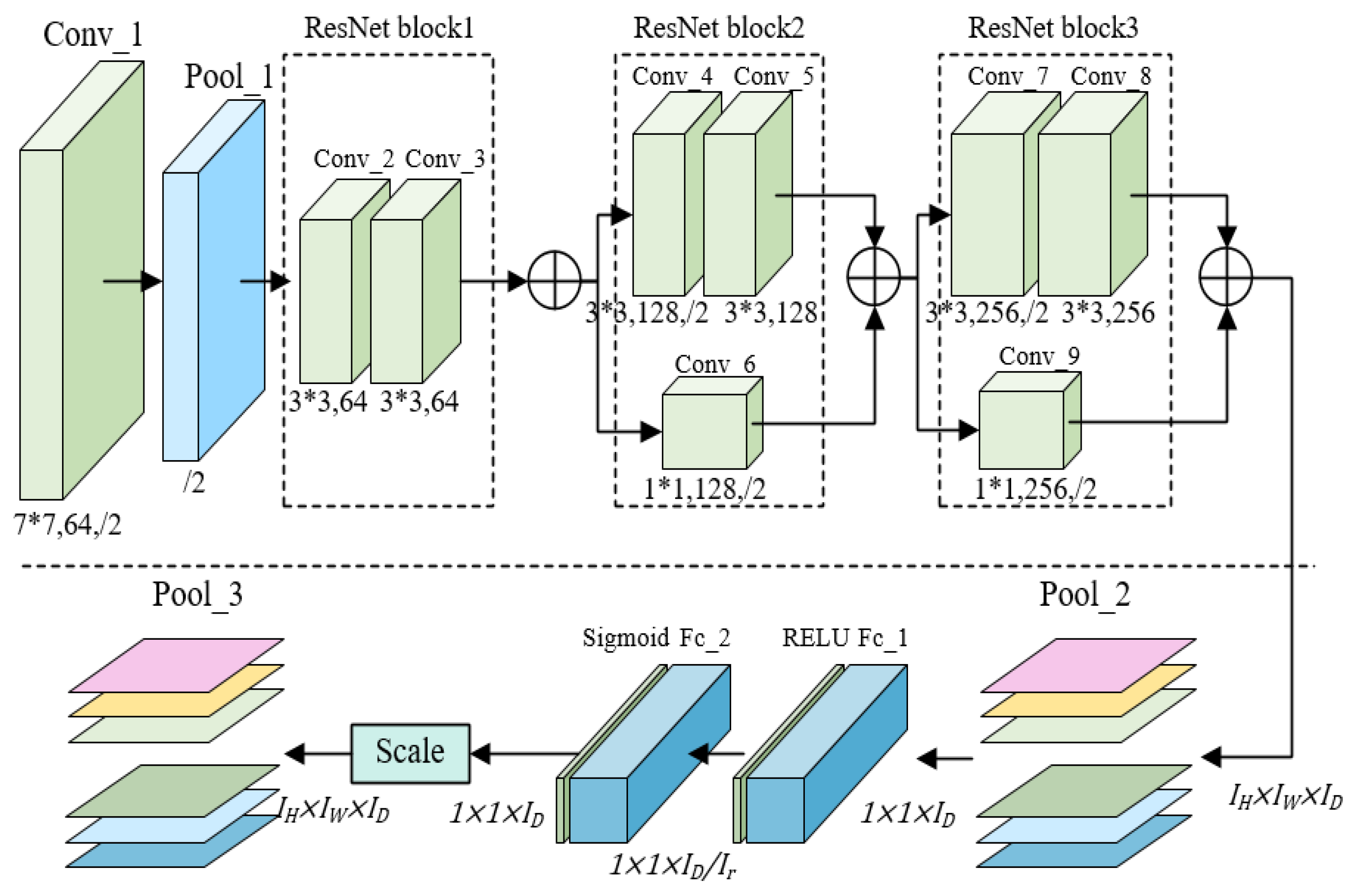
- (a)
- SE-ResNet structure
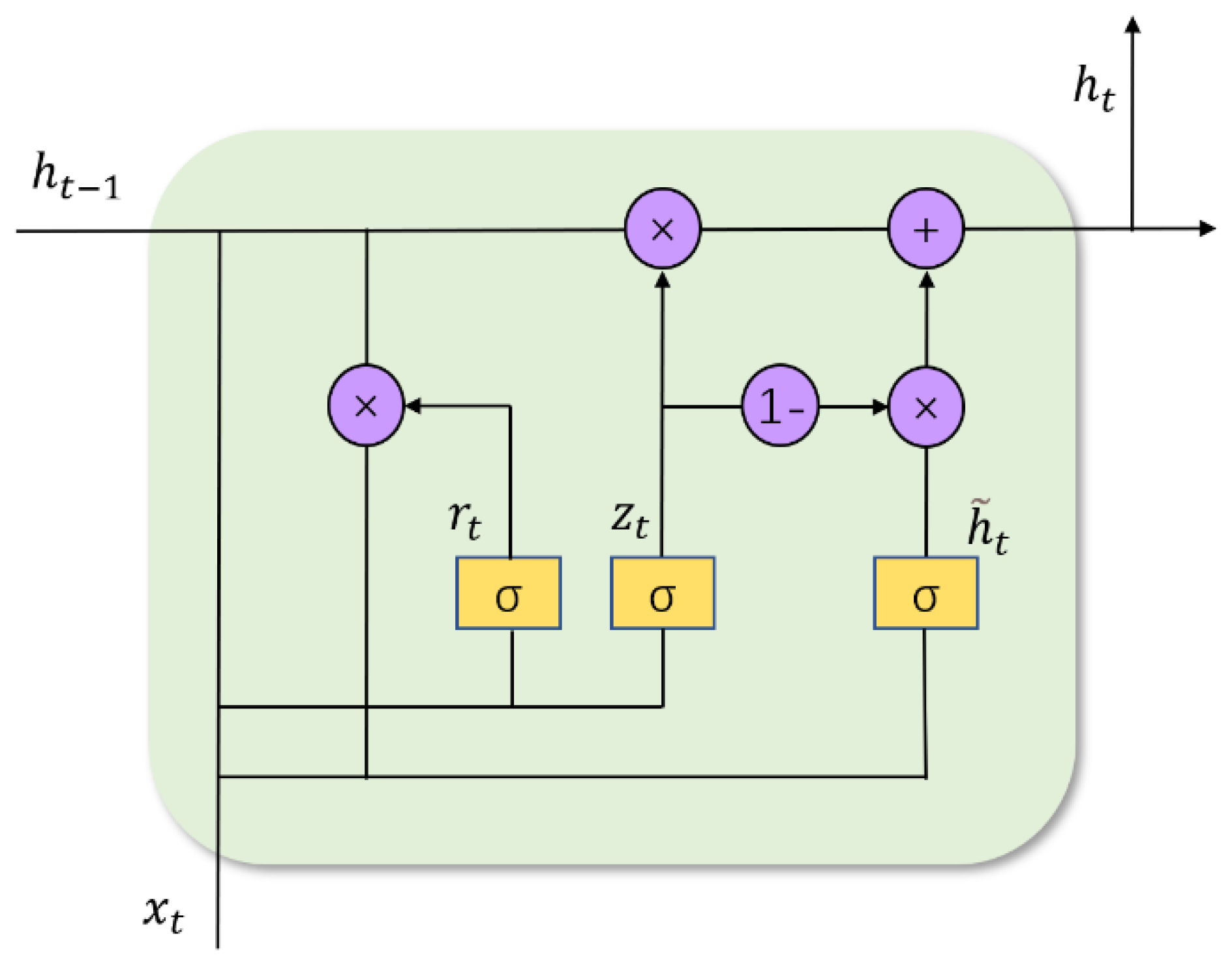
- (b)
- Gated recurrent unit
- (c)
- Classifier design
3.4. Network Transfer Learning
4. Performance Analysis
4.1. Simulation Settings
4.2. Performance of FH Sequence Recovery
4.3. Performance of Transfer Learning
4.4. Performance of FH Reception
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Lazarov, L. Perspectives and trends for the development of electronic warfare systems. In Proceedings of the International Conference on Creative Business for Smart and Sustainable Growth (CREBUS), Sandanski, Bulgaria, 18–21 March 2019; pp. 1–3. [Google Scholar]
- Rifkin, R.; Vaccaro, J.J. Comparison of narrowband adaptive filter technologies for GPS. In Proceedings of the IEEE, 2000. Position Location and Navigation Symposium, San Diego, CA, USA, 13–16 March 2000; pp. 125–131. [Google Scholar]
- Yang, D.; Xue, G.; Zhang, J. Coping with a Smart Jammer in Wireless Networks: A Stackelberg Game Approach. IEEE Trans. Wirel. Commun. 2013, 12, 4038–4047. [Google Scholar] [CrossRef]
- Maqsood, M.; Gao, S.; Brown, T. Effects of Ground Plane on the Performance of Multipath Mitigating Antennas for GNSS. In Proceedings of the Loughborough Antennas & Propagation Conference, Loughborough, UK, 8–9 November 2010; Volume 37, pp. 241–244. [Google Scholar]
- Hanawal, M.K.; Abdel-Rahman, M.J.; Krunz, M. Game theoretic anti-jamming dynamic frequency hopping and rate adaptation in wireless systems. In Proceedings of the International Symposium on Modeling and Optimization in Mobile, Ad Hoc, and Wireless Networks, Hammamet, Tunisia, 12–16 May 2014; pp. 247–254. [Google Scholar]
- Wang, W.; Yang, Y.; Li, Y. Multi-step prediction of Frequency Hopping Sequence Based on Bayesioan Inference. In Proceedings of the 2013 IET International Conference on Information and Communications Technologies, Sofia, Bulgaria, 6–7 December 2013; pp. 94–99. [Google Scholar]
- Williams, C.K.I. Prediction with Gaussian Processes: From Linear Regression to Linear Prediction and Beyond. In Proceedings of the Nato Advanced Study Institute on Learning in Graphical Models, Norwell, MA, USA, 26 March 1998; pp. 599–621. [Google Scholar]
- Lei, Z.W.; Zheng, L.H.; Ding, H. Prediction and Separation of Synchronous-networking Frequency Hopping Signals Based on RBF Neural Network. In Proceedings of the International Congress on Ultra Modern Telecommunication and Control Systerms and Workshops, Lisbon, Portugal, 18–20 October 2016; pp. 124–127. [Google Scholar]
- Zhao, X.W.; Quan, H.D.; Cui, P.Z. Frequency hopping Self-synchronization scheme based on sequence partial frequency point matching]. J. Detect. Control. 2019, 41, 66–71. [Google Scholar]
- Shan, Q.; Xiong, J.; Ma, D. Distributed multi-agent Q-learning for anti-dynamic jamming and collision-avoidance spectrum access in cognitive radio system. In Proceedings of the Asia-Pacific Conference on Communications (APCC), Ningbo, China, 12–14 November 2018; pp. 428–432. [Google Scholar]
- Han, C.; Huo, L.Y.; Tong, X.H. Spatial anti-jamming scheme for Internet of satellites based on the deep reinforcement learning and stackelberg game. IEEE Trans. Vehi. Tech. 2020, 69, 5331–5342. [Google Scholar] [CrossRef]
- Nasir, Y.S.; Guo, D. Multi-agent deep reinforcement learning for dynamic power allocation in wireless networks. IEEE J. Sel. Areas Commun. 2019, 37, 2239–2250. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Xu, Y.; Jia, L. Anti-jamming communications using spectrum waterfall: A deep reinforcement learning approach. IEEE Commun. Lett. 2017, 22, 998–1001. [Google Scholar] [CrossRef] [Green Version]
- Yao, F.; Jia, L. A collaborative multi-agent reinforcement learning anti-jamming algorithm in wireless networks. IEEE Wirel. Commun. Lett. 2019, 8, 1024–1027. [Google Scholar] [CrossRef] [Green Version]
- Machuza, K.S.; Jayaweera, S.K. Reinforcement learning based anti-jamming with wideband autonomous cognitive radios. In Proceedings of the IEEE/CIC International Conference on Communications, Chengdu, China, 27–29 July 2016; pp. 1–5. [Google Scholar]
- Liu, M.; Qi, H.Y.; Wang, J.N. Design of intelligent anti-jamming system based on neural network algorithm. Comput. Meas. Control. 2018, 26, 155–159, 169. [Google Scholar]
- Chen, H.; Niu, Y.; Pang, T. Intelligent anti-jamming communication based on the modified Q-Learning. Procedia Comput. Sci. 2018, 131, 1023–1031. [Google Scholar]
- Ran, Y.; Cheng, Y.F.; Chen, D.Y. Intelligent anti-jamming decision engine based on BP neural network. J. Signal Process. 2019, 35, 1350–1357. [Google Scholar]
- Wang, R.D.; Zhang, Y.L.; Wei, P. Intelligent Anti-Jamming Strategy for Tactical Frequency-Hopping System. J. Signal Process. 2022, 38, 1–15. [Google Scholar]
- Song, B.L.; Xu, H.; Jiang, L. An intelligent decision-making method for anti-jamming communication based on deep reinforcement learning. J. Northwestern Polytech. Univ. 2021, 39, 641–649. [Google Scholar] [CrossRef]
- Zhao, Z.J.; Zhu, J.S.; Ye, X.Y. Intelligent Anti-jamming Decision Algorithm for Frequency Hopping Network Based on Multi-agent Fuzzy Deep Reinforcemnet Learning. J. Electron. Inf. Technol. 2022, 44, 2814–2823. [Google Scholar]
- Kang, Y.J.; Lin, Y.; Zhang, Y.J. Intelligent Fast Frequency Hopping Algorithm for UAV Swarm Anti-Jamming Based on Bayesian Q-Learning. Aerosp. Control. 2022, 40, 73–78. [Google Scholar]
- Li, G.; Wang, W.; Ding, G.R. Frequency-Hopping Frequency Reconnaissance andPrediction for Non-cooperative Communication Network. China Commun. 2021, 18, 51–64. [Google Scholar] [CrossRef]
- Ge, C.; Wang, Z.; Zhang, X.F. Robust Long-Term Spectrum Prediction with Missing Values and Sparse Anomalies. IEEE Access 2019, 7, 16655–16664. [Google Scholar] [CrossRef]
- Lee, K.; Oh, S. Detection of fast frequency-hopping signals using dirty template in the frequency domain. IEEE Wirel. Commun. Lett. 2019, 8, 281–284. [Google Scholar] [CrossRef]
- Li, S.; Li, T.Y. Frequency hopping signal detection over the short-wave channel. Acta Electron. Sin. 2019, 47, 623–629. [Google Scholar]
- Lee, K.; Oh, S. Detection of frequency-hopping signals with deep learning. IEEE Commun. Lett. 2020, 24, 1042–1046. [Google Scholar] [CrossRef]
- Fu, W.; Jiang, T. A parameter estimation algorithm for multiple frequency-hopping signals based on compressed sensing. Phys. Commun. 2019, 37, 100892.1–100892.11. [Google Scholar] [CrossRef]
- Han, G.; Xiao, L.; Poor, H. Two-dimensional anti-jamming communication based on deep reinforcement learning. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 2087–2091. [Google Scholar]
- Zhang, K.; Sun, M.; Han, T.X. Residual Networks of Residual Networks: Multilevel Residual Networks. IEEE Trans. Circuits Syst. Video Technol. 2018, 28, 1303–1314. [Google Scholar] [CrossRef]
- Wu, J.; Teng, L.; Guo, Q. Radar signal sorting based on GRU neural network. In Proceedings of the 2021 IEEE 5th Information Technology, Networking, Electronic and Automation, Xi’an, China, 15–17 October 2021; pp. 1–4. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Jamming signal | five kinds of jamming signals |
| The number of frequencies | 16 |
| The number of hops of each signal | 60 |
| signal-to-jamming ratio | −10 dB to 10 dB |
| The frequency-hopping received signals | 2200 |
| The window length of STFT | 1024 |
| The number of time–frequency images | 13,200 |
| The mini-batch size | 60 |
| The initial learning rate | 0.001 |
| convolution kernel size | 7*7 |
| Stride | 2 |
| The number of convolution kernels | 64 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Wang, A.; Wu, W.; Zhao, Z.; Xu, Y.; Lei, R.; Yue, K. Deep-Learning-Based Recovery of Frequency-Hopping Sequences for Anti-Jamming Applications. Electronics 2023, 12, 496. https://doi.org/10.3390/electronics12030496
Zhu J, Wang A, Wu W, Zhao Z, Xu Y, Lei R, Yue K. Deep-Learning-Based Recovery of Frequency-Hopping Sequences for Anti-Jamming Applications. Electronics. 2023; 12(3):496. https://doi.org/10.3390/electronics12030496
Chicago/Turabian StyleZhu, Jiawei, Anqiang Wang, Wei Wu, Zhijin Zhao, Yuting Xu, Rong Lei, and Keqiang Yue. 2023. "Deep-Learning-Based Recovery of Frequency-Hopping Sequences for Anti-Jamming Applications" Electronics 12, no. 3: 496. https://doi.org/10.3390/electronics12030496