1. Introduction
The issue of service coverage when choosing a business site for a facility is an important component of business strategy, especially for businesses that operate in the real, physical world. Whether it is a retail outlet, manufacturing plant, or distribution center, companies need to carefully consider where they locate their facilities in order to best serve potential demand. Conceptually, this problem has been widely studied in papers [
1,
2,
3,
4,
5]. At the same time, one of the key tasks in site location analysis is to determine the optimal site location for maximum service coverage. The Maximum Coverage Location Problem (MCLP) is a widely used optimization problem that aims to determine the best location for a feature in order to maximize its service coverage. By taking into account factors such as population density, transportation networks, and demand patterns, the MCLP can help businesses determine the optimal location for their facilities.
In the business industry, facilities such as retail stores are very interested in optimizing location decisions [
6]. By locating their stores in areas with high traffic and purchasing power, retailers can capture market share and optimize revenue. The MCLP can help retailers determine the best location for their stores based on factors such as surrounding demographics, proximity to competing retailers, and site accessibility. For manufacturers, the optimal site location can be determined by factors such as availability of raw materials and proximity to transport networks [
7]. By identifying the best location for their facilities, manufacturers can reduce the costs associated with acquiring raw materials and transporting goods, improving overall profitability.
The application of the MCLP is not limited to the private sector. Public sector organizations such as healthcare providers and emergency services can also benefit from streamlining their facility placement decisions [
8]. By optimizing facility placement decisions, these organizations can increase access to healthcare, improve response times, and save lives. For healthcare providers, the MCLP can help to identify the optimal locations for hospitals, clinics, and other healthcare facilities. By analyzing factors such as population density, demographic data, and disease prevalence, healthcare providers can identify areas with high demand for healthcare services and determine the optimal locations for their facilities. This can help to increase access to healthcare services, reduce wait times, and improve overall health outcomes for the community. Therefore, site location is a major issue for businesses and organizations in a wide variety of sectors. By applying the MCLP to location decisions, businesses can optimize service coverage, reduce operating costs, and gain a competitive advantage in the marketplace.
The standard MCLP considers a finite set of possible locations for items, and a set of discrete points represents demand. This problem was proposed by R.L. Church and C. ReVelle [
9]. As a result, the MCLP can be formulated as an integer linear programming problem. A variety of task statements arise due to the use of different methods for determining the coverage area of a potential item or assigning weights to sites.
Later, with the development of mathematical modeling tools and computer technologies, the formulation of the MCLP was significantly generalized and expanded, taking into account applications to various subject areas, such as the location of police stations [
10], the allocation of emergency response centers [
11], the placement of drones facilities to provide various services [
12], positioning antennas [
13], the placement of charging stations for electric vehicles [
14], and many others. The construction of adequate mathematical models of the listed tasks is necessary to take into account the geometric properties of the demand zone and service areas.
The assumption that demand can only be represented as point data without measurement is a significant limitation in location modeling. Demand is often continuously distributed over a unit area of a particular geometric shape, and such distribution must be considered when modeling a location. To address this limitation, some studies have used regional representations of demand. These area-based representations take the size and shape of the area into account when estimating demand, resulting in a more accurate and realistic representation of demand.
In [
15], it is proposed to continuously place both service areas and its centroids on the plane. Such a problem is called the planar MCLP and is NP-hard [
16]. In [
17], a planar MCLP with partial coverage and rectangular demand and service zones are studied. The problem is how to position a given number of rectangular service zones on the two-dimensional plane to partially cover a set of existing (possibly overlapping) rectangular demand zones such that the total covered demand is maximized. Based on the properties of the model, the possibility of a significant reduction in the search space is theoretically substantiated.
In [
17,
18], a computational geometry-based approach was proposed to study partial coverage by rectangular and circular service areas. In [
19], a mixed integer nonlinear programming model was formulated to determine the position of rectangular items of unequal area when the demand area is a continuum. A continuous approach is proposed using an annealing simulation algorithm for solving large-scale problems. For the initial solution, a heuristic algorithm based on the geometric features of the problem is used.
In [
20], the MCLP is analyzed, in which continuity conditions are imposed on the location of items; however, the discrete structure of the demand area is preserved, taking into account the graph of relations between the centroids of the service areas. The problem of mixed-integer nonlinear programming is formulated. At the same time, considering the geometric properties, its equivalent reformulation in the form of an integer linear programming problem is proposed.
Let us also point out approaches that use the decomposition of the demand area into several smaller regions, taking into account the ratio between fully covered and uncovered areas [
15,
21,
22,
23]. It is assumed that the object covers the demand of the region if it serves the entire region. Since obtaining even a partial maximum coverage is not a trivial problem, an auxiliary problem of partial coverage by only one item is considered.
Particular interest is given to continuous problems of optimal set partitioning. Such problems include infinite-dimensional problems of enterprise location with simultaneous partitioning of a given region, continuously filled with consumers, into consumer areas, each of which is served by one enterprise, in order to minimize transportation and production costs. The relevance of infinite-dimensional location problems arises when there are a large number of consumers. In this case, the consideration of a discrete mathematical model becomes inexpedient due to the difficulties associated with solving problems of excessively large dimensions. In addition, there are problems that can be reduced to problems of optimal partitioning, in which the set partitioned into subsets is already initially continual in its structure. In [
24,
25,
26,
27], the foundations of the mathematical theory of continuous problems of optimal partitioning of the Euclidean space sets into subsets, which are nonclassical problems of infinite-dimensional mathematical programming with Boolean variables, are laid. Within the framework of this theory, a number of directions have been investigated, determined both by various areas of its applications and by types of mathematical formulations of partitioning problems. These are single-stage deterministic linear and nonlinear, single-product and multi-product problems of optimal set partitioning under constraints, with both a given location of the subset centers and with finding the optimal variant of their location; two-stage continuous–discrete optimal location-allocation problems; optimal set partitioning problems under uncertainty; dynamic problems of optimal set partitioning; and others.
Summarizing the above, we state that the study of complex spatial representations of the demand zone and service areas provides more accurate and meaningful information for decision-making processes in various applications. In turn, this requires a deep understanding of the spatial characteristics of demand and service areas, such as their size, shape, and relative position, and the inclusion of this information in location modeling. In addition, the increased use of geographic information systems and digital spatial information increases the importance of exploring alternative representations of the spatial shapes of both demand and service areas when modeling their location.
The purpose of this article is to study the maximum coverage of services when choosing business sites in the MCLP formulation, taking into account the given shapes of the demand zone and service areas, the development of mathematical models and approaches to solving the planar MCLP using modern computer technologies. The main emphasis is on the arbitrary shapes and sizes of both the demand zone and the service areas, as well as on the possibility of using the Shapely library of the Python algorithmic language. The rationale for choosing this particular library is given.
2. Materials and Methods
2.1. Problem Statement
There is a demand zone (region) and a family of service areas . Each service area is associated with a point , which we will call a centroid. The areas will be defined relatively to that point. The problem is how to find such a position of service area centroids in order to provide the optimal service of the demand zone according to a given criterion. It is assumed that the shape and geometric sizes of the demand zone and service areas are specified. Restrictions can be imposed on the position of centroids , which determine their allowable location. As optimality criteria, we will consider the maximum coverage area of the demand zone.
Let us pose this task in terms of the Maximum Coverage Location Problem, considering the demand zone and the service areas as planar geometric items.
2.2. Auxiliary Concepts
In -dimension Euclidean space , an item is a geometric set of points that satisfy an inequality . The equation defines the boundary of the item and its shape. In the general case, the boundary equation contains constants , which are called metric parameters, which determines linear sizes of , i.e., . We assume that the function is defined and continuous in for any , where is the set of admissible values of metric parameters .
In what follows, we restrict ourselves to a plane problem, so , .
Consider a fixed Cartesian coordinate system . Let us choose a point and associate with the item its own (moving) Cartesian coordinate system , with the origin at the point . The location of the item in the coordinate system will be determined by the so-called placement parameters , where are the coordinates of the point in the fixed coordinate system, and is the angle of rotation relative to .
The location of an item
relative to a fixed coordinate system is given by the equation of its general position:
where the operator
has the form
Note that the number of placement parameters can be reduced, particularly for centrally symmetrical geometric items. In addition, some placement parameters can be fixed in accordance with the problem statement.
To consider geometric items that have a given shape, but variable metric
and placement
parameters, in [
28,
29] the concept of a configuration space of geometric items
is introduced, with generalized variables
. Any point
,
in this space corresponds to a parametrized geometric item
such that
where fr, int, and cl are the operations of the topological boundary, interior, and closure, respectively.
2.3. Math Modeling
Let be a geometric item corresponding to the demand zone and be a family of geometric items corresponding to the service areas. Analogous with the above definitions, we set the metric and placement parameters , for . Here are the coordinates of the centroids in the fixed coordinate system .
Let us form the configuration spaces
of items
with generalized variables
. Then, we construct the configuration space
with generalized variables
as a Cartesian product of configuration spaces
, i.e.,
Note that depending on the problem statement, some generalized variables may be given. To indicate this, we will use a cap over the corresponding variable.
The solution of the problem posed involves the construction of appropriate mathematical models which are primarily associated with the formalizing of the optimization criterions and constraints, followed by the choice of effective methods for local and global optimization.
In this article, the maximum service coverage of the demand zone is considered as an optimality criterion.
To determine the dependence of the specified optimality criterion on placement parameters
of service areas, an approach based on the concept of a
-function [
30] for a complex geometric item is proposed.
Let
be the initial set of geometric items. By the logical operators (union, intersection, difference), we will define a mapping as
that forms a so-called complex item
. We will assume that the mapping
determines the structure of a complex item
.
In the configuration space
, a complex item
corresponds to a parameterized geometric item
Let the sets
be measured by Lebesgue for any
. We define a function as
where
is the Lebesgue measure.
The function
defined in this way is called
-function [
30].
In its essence, for the planar complex parameterized geometric item , the -function determines the dependence of its area on the generalized variables of the constituent items .
To define the
-function, we introduce the characteristic function
To construct the corresponding -functions, it is necessary to form the configuration spaces of geometric items , and write down the equations of their boundaries and general positions .
In applied problems, geometric items that have the shape of a circle, ellipse, and polygon are most often considered.
For circular items, generalized variables are its radius
(metric parameter) and the coordinates of the center
in a fixed coordinate system (placement parameters), i.e.,
. The general position equation has the form
For an ellipse
, the generalized variables are semi-major
and semi-minor
axes, the coordinates
of the center of symmetry in a fixed coordinate system, and the angle
of rotation of its own coordinate system, i.e.,
. The general position equation can be written as
For a polygon with vertices, metric parameters can be set, for example, by ordering the coordinates of its vertices in its own coordinate system . The placement parameters will be the coordinates of the system origin and the angle of its rotation, i.e., . The general position equation is easy to write using the equations of lines passing through adjacent vertices of the polygon.
To use the approach described above to solve the problem posed in this article, we consider the formation of complex items based on mapping (2). Let us put the family of mappings as
where
We fix the location of the demand zone by setting
and setting the metric parameters
of the demand zone and service areas. Then,
Considering that both metric parameters and the placement parameters are given, our goal is to find the placement parameters of service areas that provide the maximum service coverage. Note that with the given metric parameters of geometric objects, their Lebesgue measure (area) does not depend on placement parameters, i.e., .
The dependence of the coverage area of the demand zone
on placement parameters
of service areas
can be represented as
where the mapping
has the form (4).
As a result, we have a nonlinear optimization problem
subject to
where
is a feasible region, which is given by restrictions on the location of centroids
An example of such restrictions can be the conditions for the minimum
and maximum
distances between centroids
and
,
which have the form
2.4. Decision Optimization Using Computer Geometry Software
The optimization problem (7) is high-dimensional and multi-extremal. The ways to solve it are determined by the properties of the function
. Unfortunately, it is impossible to obtain an analytical expression for
in the form of a dependence on variables
,
. Indeed, for this it is necessary to carry out integration according to formula (3), which is an impossible task for regions of a complex shape. We propose to calculate the function
using modern computational geometry packages. The features of the implementation of such packages when solving placement and coverage problems using
-functions are described in [
31,
32,
33].
Currently, you can find a wide list of libraries that allow you to operate with complex geometric shapes, in particular,
SymPy,
Shapely,
CGAL,
SpaceFuncs, and many others. Based on the analysis of these libraries, taking into account the necessary functionality for calculating the function
, we chose the
Shapely library [
34] of the
Python algorithmic language.
Shapely is created for the theoretical analysis of point sets and the manipulation of planar objects using the functions of the GEOS library through the ctypes Python module. GEOS as a port of the Java Topology Suite package is the geometry attribute of the spatial extension of PostGIS. At the same time, Shapely adheres mainly to uniform standard classes and operations.
The Shapely library makes it possible to perform operations on geometric shapes using logical operators (union, intersection, difference, and complement) and to build complex shapes on the plane from a set of basic shapes (polygon, circle, and ellipse). To model basic shapes, the geometry module is used, which includes the Point and Polygon classes. We import the Point and Polygon classes for geometry items from Shapely as follows:
from shapely.geometry.point import Point
from shapely.geometry import Polygon
A point is given by its coordinates and a polygon by an array of vertex coordinates. When using the Shapely library, the complexity of the shape does not matter and only affects the calculation time. At the same time, geometric items are created typically for Python through the instance factory. If necessary, factories can be checked for topological simplicity or validity using the predicate: attr:is_valid.
Since there is no special data type for circle and ellipse in the Shapely library, the affinity module is used to construct them. A set of affine transformation functions is contained in the shapely.affinity module, which returns geometric shapes by directly providing coefficients to the affine transformation matrix or by using a custom named transformation (rotate, scale, etc.).
To build a circle, you need a standard set of its generalized parameters—the coordinates of the center (x, y) and the radius r:
circle_center = Point(x, y)
circle = circle_center.buffer(r)
For an ellipse, the major semi-axis a and the minor semi-axis b are used:
ellipse_center = Point(x, y).buffer(1)
ellipse = affinity.scale(ellipse_center, a, b),
where the affinity.scale function scales the item according to the values of the semi-axes.
The function affinity.rotate (item, ) is used to rotate the item by an angle . Here ‘item’ specifies the shape (polygon, ellipse, or complex shape). However, in any case, as a result of the affine transformation, an item belonging to the Polygon class is built. This is the main reason for the simplicity of operations between the complex items, since, in fact, these are operations on polygons. Logical operations difference, intersection, union, symmetric_difference are used for any two items in the geometry module.
From the point of view of using the Shapely library, the ability to calculate the area of a complex geometric item is fundamental. There is an area field for this. When forming any item, its area is calculated automatically.
The ability to calculate the function for any fixed placement parameters allows the use of modern methods of local and global optimization to solve problem (7). However, this requires too much computation of this function. Therefore, there is a question around the development of effective approaches that reduce their computational complexity.
Based on the specifics of the problem statement, we offer the following approach. Let us consider the auxiliary optimization problem, which consists in minimizing the total area of paired overlaps of service areas and their overlap with the complement of the demand zone.
The auxiliary problem is formulated as
where
the family of mappings
,
,
have the form (4);
, are constants equal to the item areas .
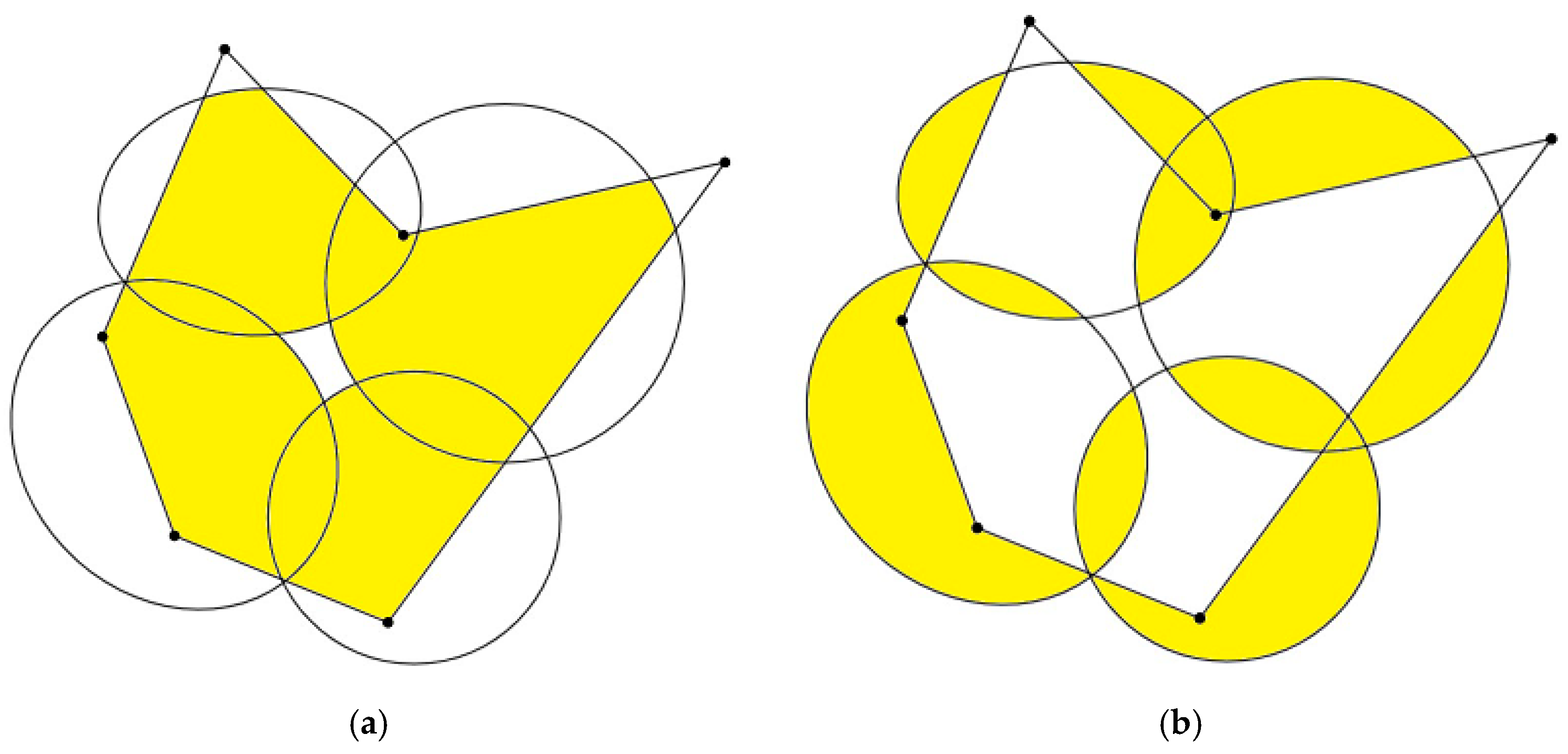
To clarify the geometric meaning of the functions
and
for the fixed placement parameters of items, we present
Figure 1. In
Figure 1a, the service coverage is shown. In
Figure 1b, the overlapping of service areas between themselves and with the demand zone complement are also colored.
Obviously, it is expected that the solution to problem (8) will be a good approximation for problem (7). This assumption is confirmed by the test tasks presented in the next section.
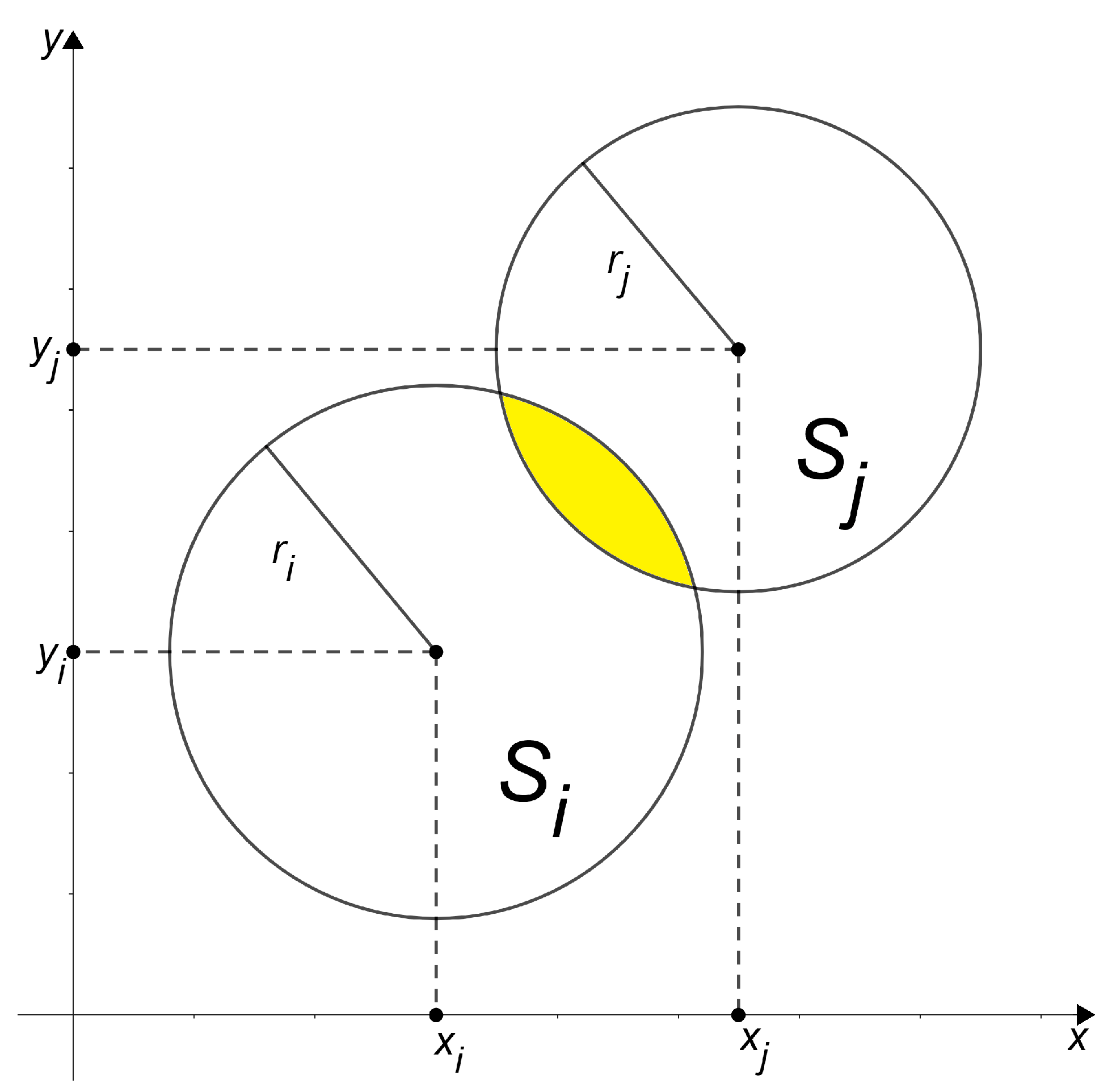
The main advantage of problem (8) is that in order to calculate functions , , , , using the Shapely library, there is no need to form a complex item (6), but it is enough to consider only the operations of the intersection of two items. Moreover, for geometric items of a simple shape (circles, ellipses, and polygons), formulas are known for the dependence of the intersection area of items on their placement parameters.
Based on the above reasoning, we propose the following approach to solving problem (7), highlighting the stages of local and global optimization. At the stage of local optimization for the starting point
, we find the local minimum
of the function
. To solve this problem, the Nelder–Mead method or an efficient gradient method can be used. If analytical expressions for the functions
,
,
,
are known, then the calculation of their gradients does not cause difficulties. In general, first order differences can be used. Then the value of the function
is found, and the point
is considered as an approximation to the local solution of the problem (7). Note that for the function
, the calculation of the first order differences has features that are studied in [
33].
At the stage of the global optimization, a multi-start method was used, when at each iteration, initial points were randomly generated, approximations to the local minimum of the function were found , and values were calculated. After all iterations, the best point was chosen as the starting point for local optimization of the function . The resulting solution is considered as a solution to problem (7).
3. Results
We implemented the approach described above to solve the following problem. Let the demand zone
be a polygon, and the service areas
have a circular shape with generalized variables
, where
is the given radius;
are the coordinates of the circle center in the fixed coordinate system
(
Figure 2).
The following formulas were used to calculate the functions
,
,
and their gradients:
The functions , were calculated algorithmically using the Shapely library. Polygon generalized variables were specified by a list of vertex coordinates (vert_coords) and . The Python code instance is as follows:
from shapely.geometry.point import Point
from shapely.geometry import Polygon
region = Polygon(region_vert_coord)
circle = [Point(center_coord[i]).buffer(r[i]) for i in range(n)]
result_functionG = 0
for i in range(n):
result_functionG += region.intersection(circle[i]).area
To find the local minimum of the function
given by formula (9), we used the Broyden–Fletcher–Goldfarb–Shanno (BFGS) method [
35]. The gradients of the functions
,
,
were calculated analytically based on formula (10), and for the functions
,
, first order differences were used.
To find the local maximum of the function , we also used the BFGS method with first-order differences. In this case, the function was calculated algorithmically using the Shapely library according to the Python code instance
circle_loc = [Point(center_coord_loc[i]).buffer(r[i]) for i in range(n)]
result_areaW = region.intersection(unary_union(circle_loc)).area
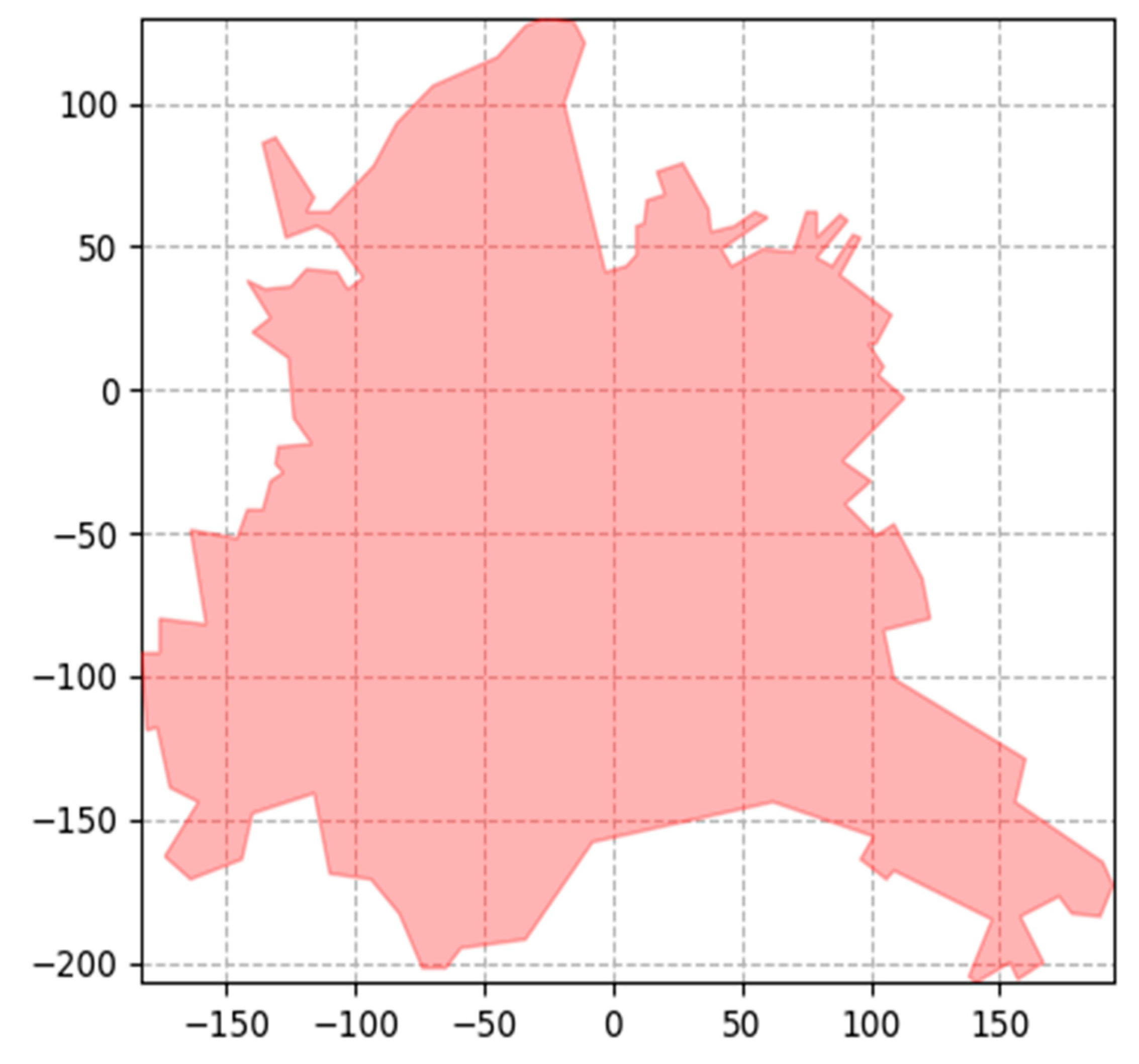
For the numerical implementation of the approach, we chose the polygon
corresponding to the Kharkiv region (Ukraine) as the demand zone.
Figure 3 shows this region, and
Table 1 lists the coordinates of the vertices of
. As service areas, the 30 circles
are considered and the radii
, both of which are presented in
Table 2. The polygon
area is 65,837 units, the total area of the 30 circles is 67,343.5 units.
We used a computer with the following configuration: Intel Core i7-5557U processor, CPU Speed 3.1 GHz, 2 cores, 4 threads; RAM 16 GB DDR3 1866 MHz; Graphics processor Intel Iris Graphics 6100 with 1.5 GB of video memory; SSD 512 GB; Operating system Mac OS X11.0 Big Sur.
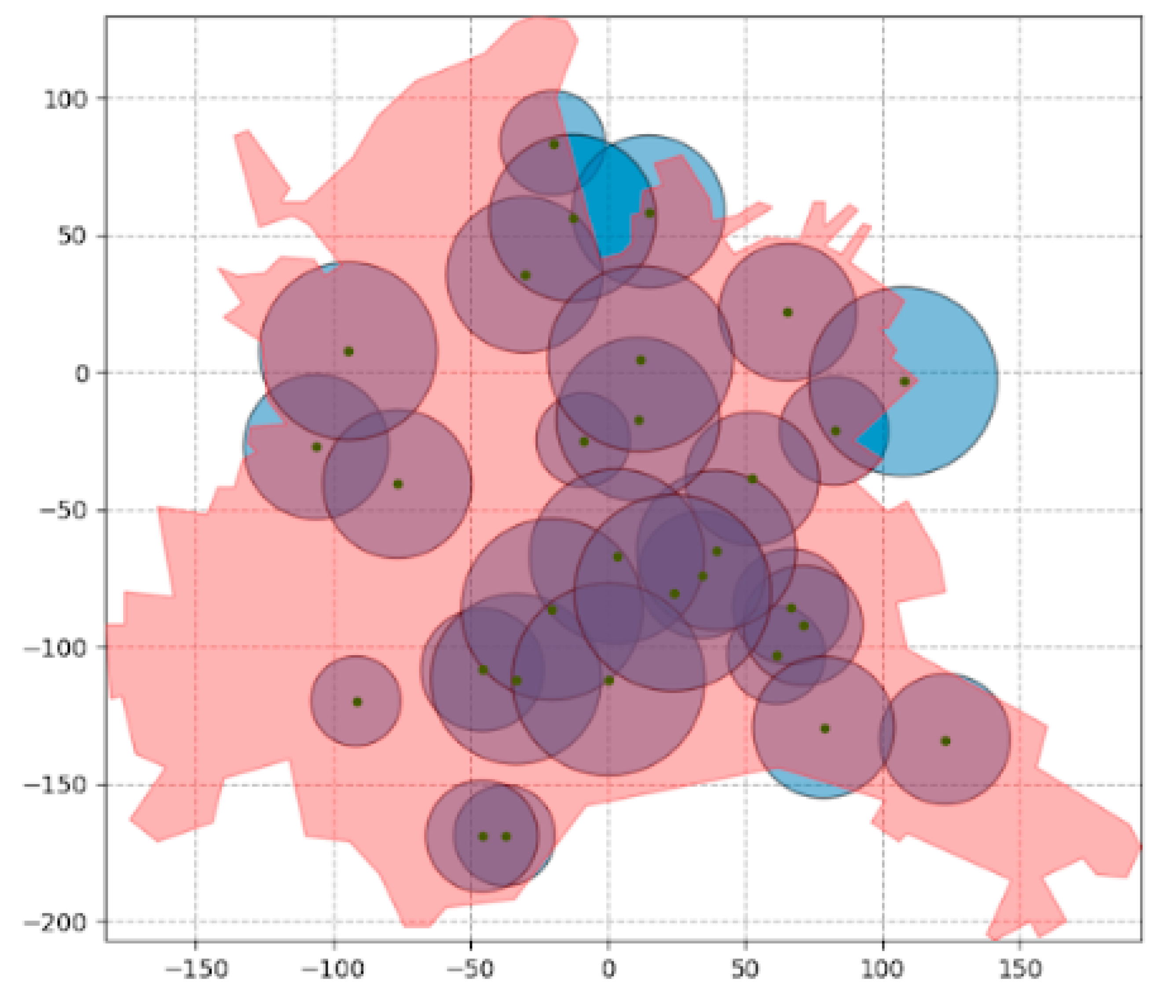
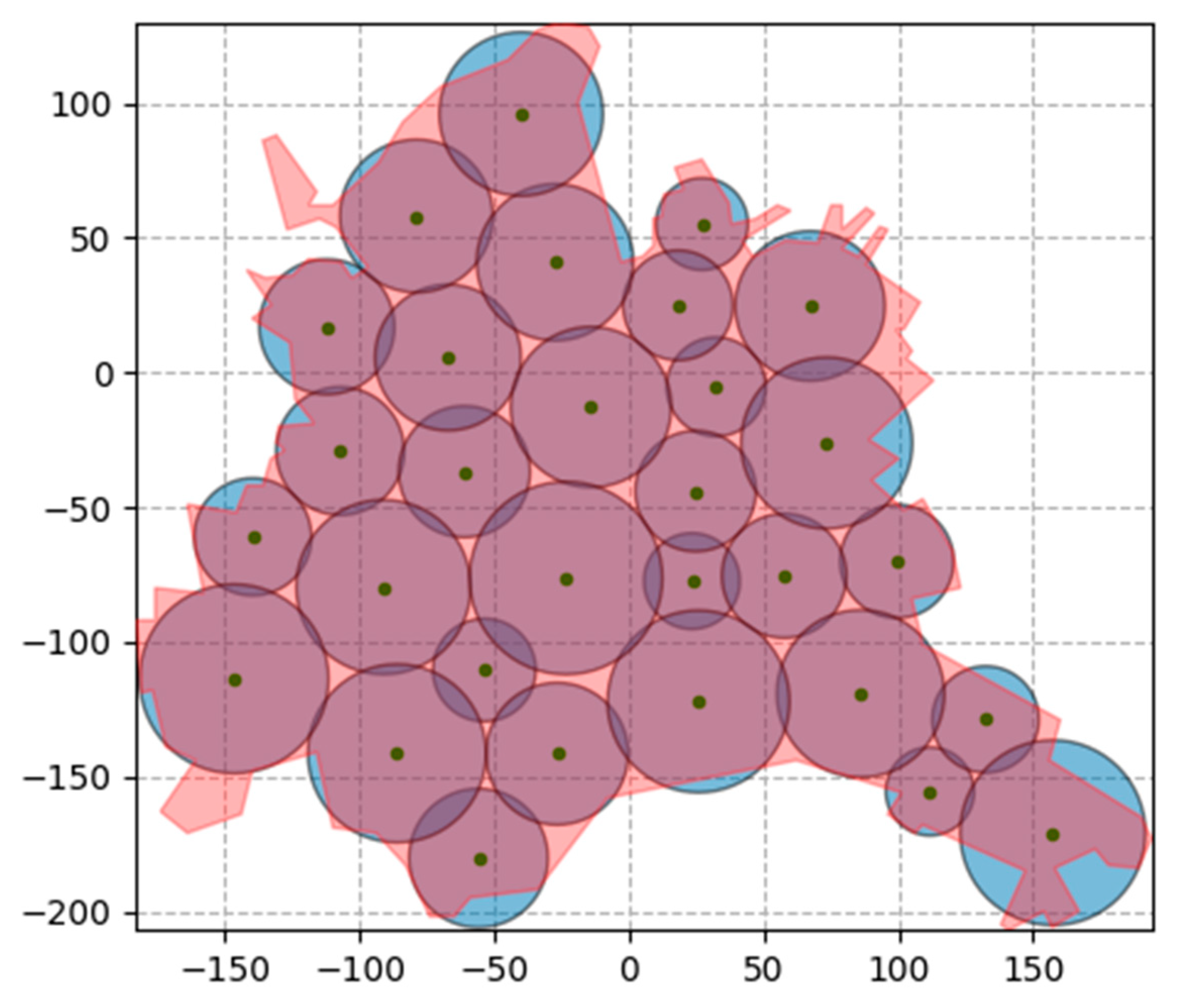
For the global optimization of the function
, a multi-start was used with a random generation of 1000 starting points and the calculation of the corresponding local extrema of
. In
Figure 4, one of the typical options for the random location of the 30 circles is given. The placement parameters
corresponding to the best result in the multi-start series are presented in
Table 3. The area of the region
covered by the services is equal to 60,798.8 units.
Further improvement by maximizing the function
made it possible to obtain the solution depicted in
Figure 5. Improved circle placement parameters are listed in
Table 4. The corresponding area of the region
covered by the services is equal to 60,806.5 units.
In the process of implementing the approach, the following run time parameters were obtained. For the 30 circles, each local extremum of the function was searched for an average of 1.7 s with the random generation of the starting point . The multi-start run time of 1000 starting points with subsequent local optimization required 1942 s. The local optimum of the function is found to be 1.3 s. In this case, the best solution resulting from the multi-start was taken as the starting point. The fact that the local extremum of a more complex function is found to be faster than for is explained using a good starting point. As experiments have shown, the average time to obtain a local solution to the function in the case of the random generation of the starting point was about 4.9 s. Analysis of the results substantiates the expediency of using an auxiliary problem at the stage of global optimization.
When the items have the shape of an ellipse, then ; where are given semi-major and semi-minor axes, are the coordinates of the center in the coordinate system . To obtain dependencies , one can use the formulas for the area of the intersection of the two ellipses. Due to the cumbersome nature of these formulas, we do not present them here. Moreover, as shown by numerical experiments, the time for calculating functions and , , from analytical formulas is commensurate with the use of computer geometry software.
In this case, the Python code instance for calculating function is as follows:
from shapely.geometry.point import Point
from shapely.geometry import Polygon
from shapely import affinity
region = Polygon(region_vert_coord)
ellipses = []
for i in range(n):
circle = Point(center[i]).buffer(1)
ellipses.append(affinity.rotate(affinity.scale(circle), a[i], b[i]), angle[i]))
functionG = 0
for i in range(n − 1):
for j in range(i + 1, n):
functionG += ellipses[i].intersection(ellipses[j]).area
sum_ellipse_area = 0
for i in range(n):
functionG -= region.intersection(ellipses[i]).area
sum_ellipse_area += ellipses[i].area
functionG += sum_ellipse_area
The Python code instance for calculating the function looks like this:
region = Polygon(region_vert_coord)
ellipses_loc = []
for i in range(n):
circle = Point(center[i]).buffer(1)
ellipses_loc.append(affinity.rotate(affinity.scale(circle), a[i], b[i]), angle[i]))
result_functionW = region.intersection(unary_union(ellipses_loc)).area
Let us consider a test problem similar to the one above but with an ellipse-shaped service area
. Semi-major and semi-minor axes
,
are presented in
Table 5. The total area of the 30 ellipses is 66,212.2 units.
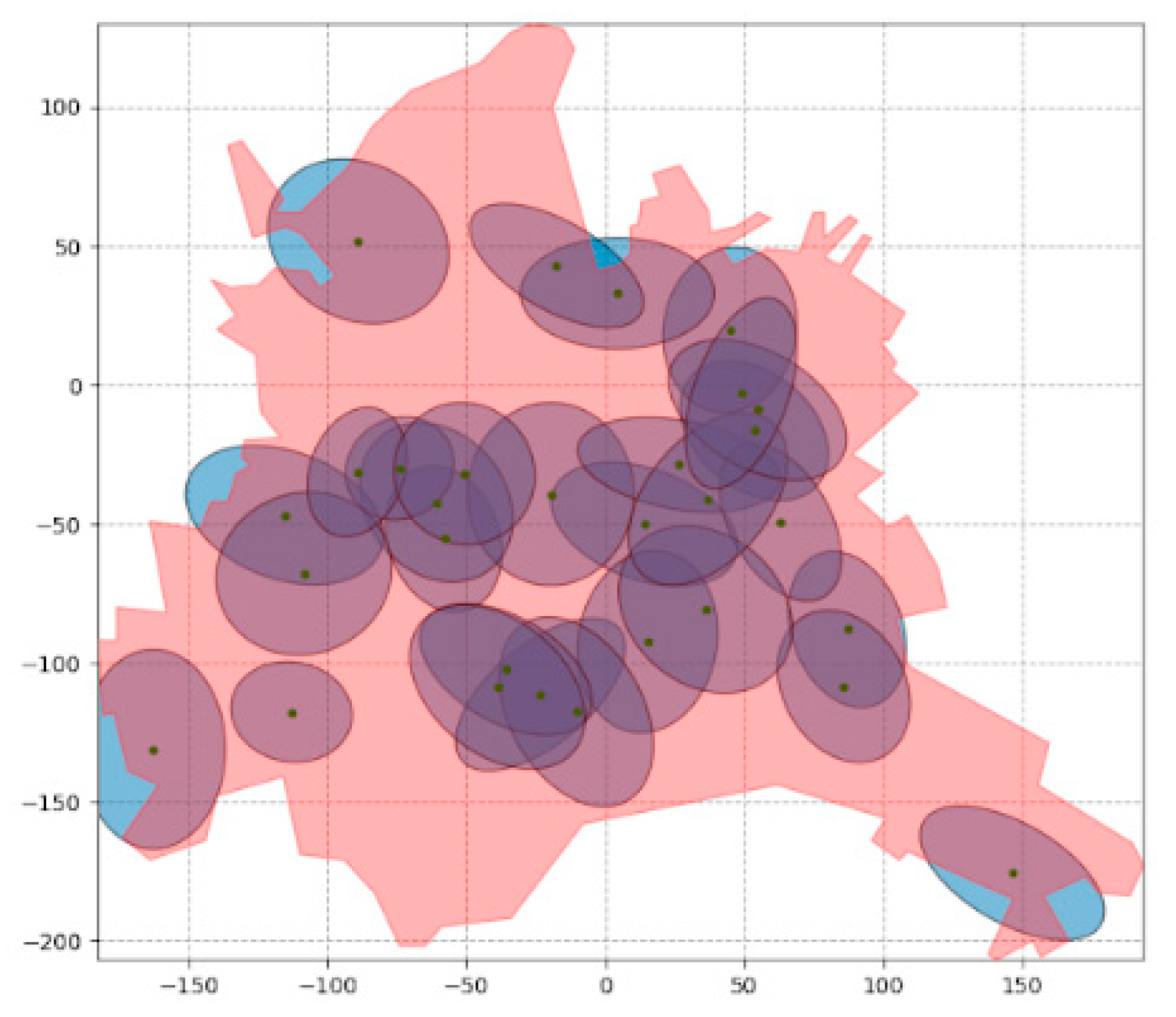
For the global optimization of the function
, a multi-start was used with a random generation of 100 starting points
and the calculation of the corresponding local extrema of
. In
Figure 6, one of the typical options for the random location of the 30 ellipses is given. The placement parameters
corresponding to the best result in the multi-start series are presented in
Table 6. The area of the region
covered by services is equal to 60,946.5 units.
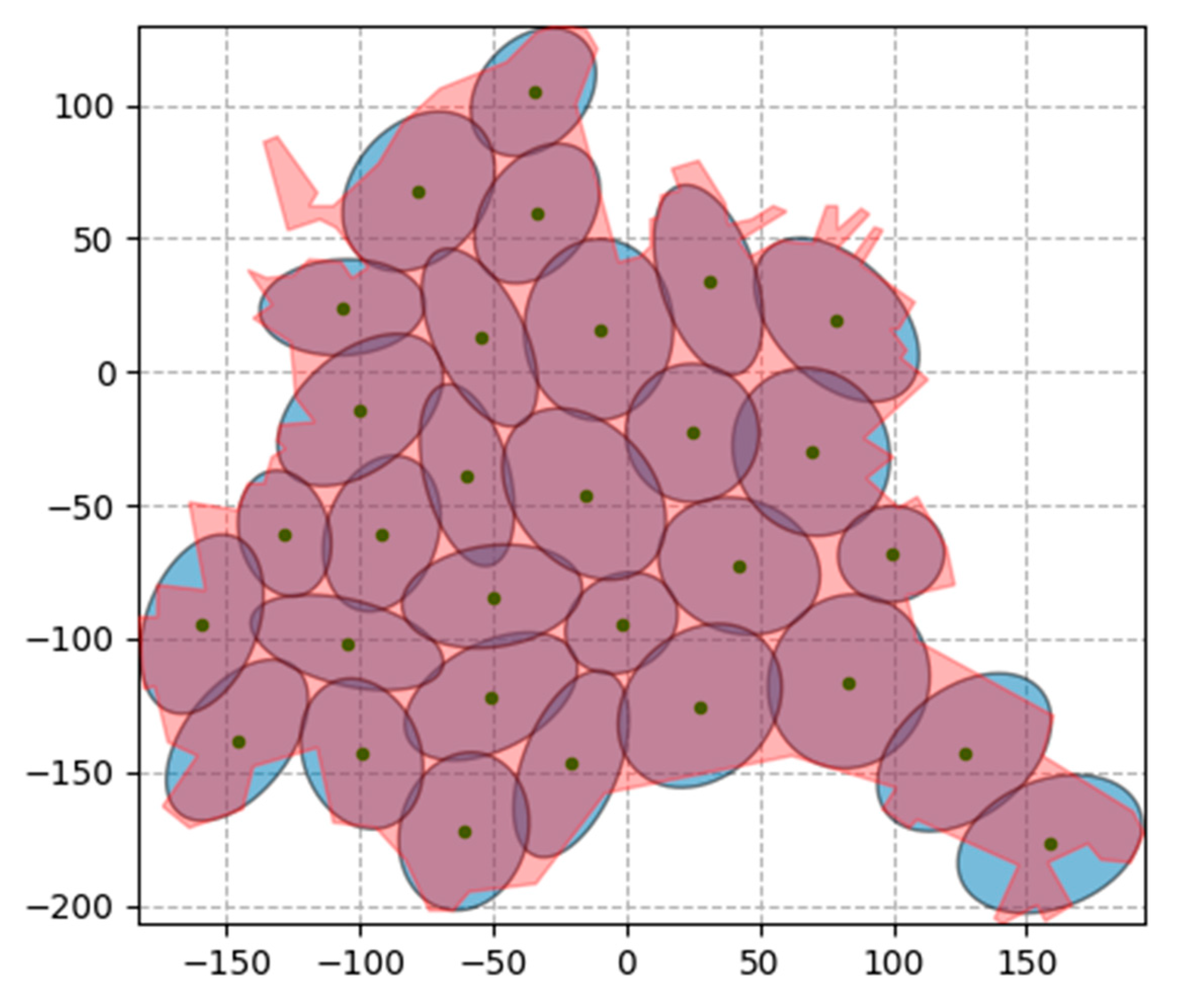
Further improvement by maximizing the function
allowed us to obtain the location of the service areas shown in
Figure 7. Improved ellipses placement parameters are presented in
Table 7. The corresponding area of the region
covered by the services is equal to 60,957.0 units.
For the 30 ellipses, the local extremum of the function was searched for an average of 14.5 s with the random generation of the starting point. The multi-start run time of 100 starting points with subsequent local optimization required 1542 s. The local optimum of the function , when the best solution resulting from the multi-start is chosen as the starting point, was found to be 8.3 s. The average time for finding the local maximum of the function in the case of the random generation of the initial starting point is about 25 s.
Thus, the use of an auxiliary problem for the global optimization of the function significantly reduces the solution time, and the results are close. The time saved can be used to increase the number of starting points in the multi-start scheme, and therefore to obtain a better solution to the problem as a whole.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}