

Performance Evaluation of C/C++, MicroPython, Rust and TinyGo Programming Languages on ESP32 Microcontroller

Abstract
:1. Introduction
2. Materials and Methods
2.1. Programming Language Features
2.2. Programming Languages Used for Evaluation
2.3. Algorithms Used for Performance Comparison
- Presence in more than one embedded-oriented benchmark suite and more than two test categories. Algorithms that were already used in several benchmarks and grouped into different test categories were preferred, as they are known to be suitable for a more comprehensive performance evaluation.
- Presence in related works. Algorithms that were already used in similar performance comparisons on ESP32 were considered to be better tested and well suited for this work. Currently, the authors of [10] compare CRC-32 and SHA-256 in C and MicroPython on ESP32.
- Availability in vendor libraries. Algorithms that are implemented in Espressif (ESP32 vendor) officially provided libraries were assumed to be well tested and suited for ESP32, as well as faster to implement and port to other languages, due to their comprehensive documentation and use examples.
- Ease of use and verification. Since each selected algorithm had to be implemented in four different languages, it was crucial to be able to verify that each version outputs the correct results. Algorithms that can take a simple stream of data (such as an array) and similarly output another stream of data or a single value were preferred. Then the input and expected output data could be easily generated and verified.
- Open source. The algorithm code should be available as an open source in any of the compared languages.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Source | Input Data Type (Passed as Array) | Comment | Reasons for Selection | Areas of Use |
|---|---|---|---|---|---|
| CRC32 | [40] | uint8 | IEEE polynomial | Presence in more than one benchmark (BEEBS, MiBench) Presence in related works Ease of use and verification | Network Telecommunication Security |
| SHA256 | [41] | uint8 | - | Presence in more than one benchmark (BEEBS, MiBench) Presence in related works Ease of use and verification | Network Telecommunication Security/Cryptography |
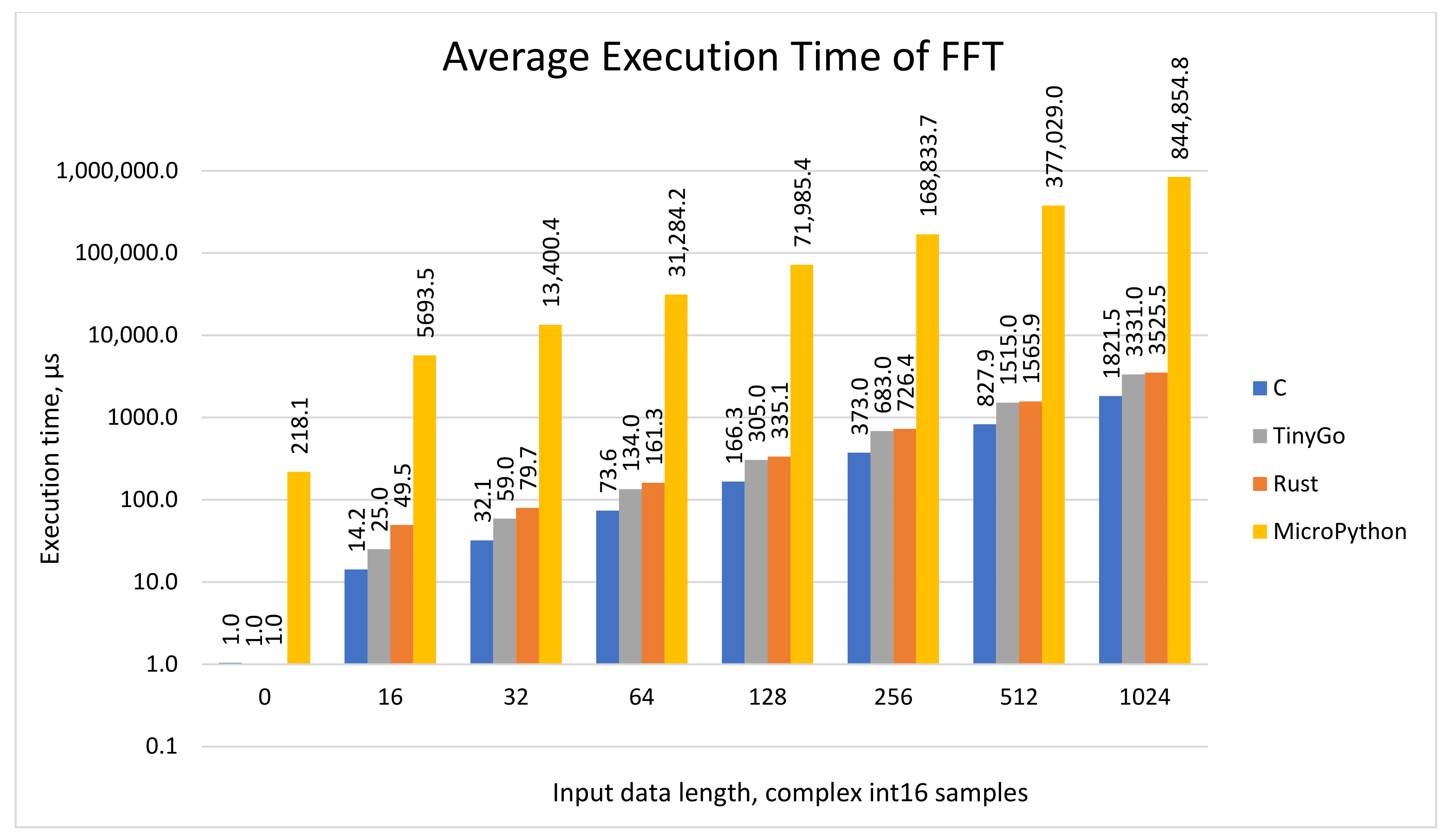
| FFT | [42] | int16 | - | Presence in more than one benchmark (MiBench, EEMBC) Availability in vendor libraries Ease of use and verification | Telecommunication Consumer Automotive |
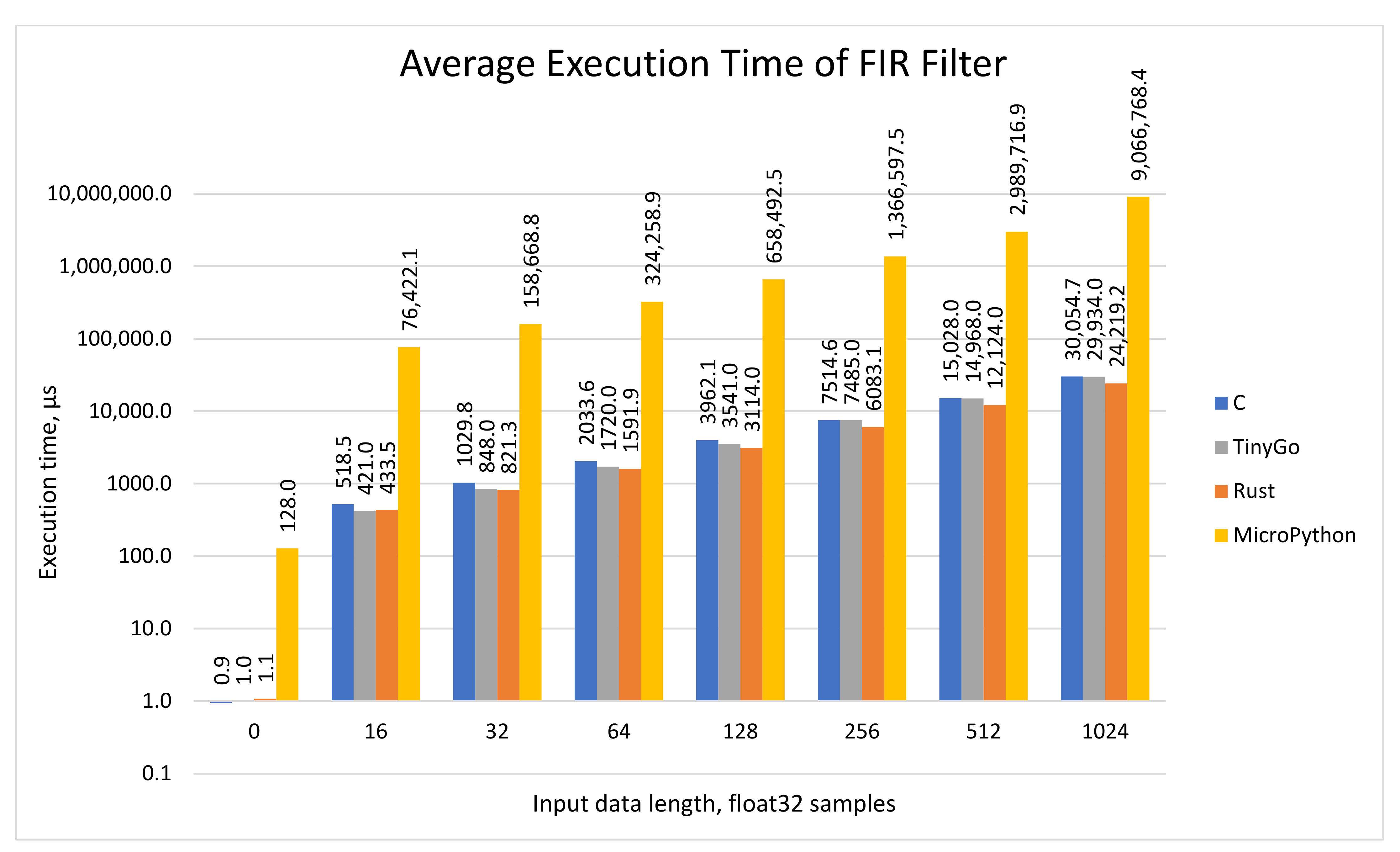
| FIR | [43] | float32 | 256 coefficients | Presence in more than one benchmark (EEMBC, BEEBS) Availability in vendor libraries Ease of use and verification | Telecommunication Consumer Automotive |
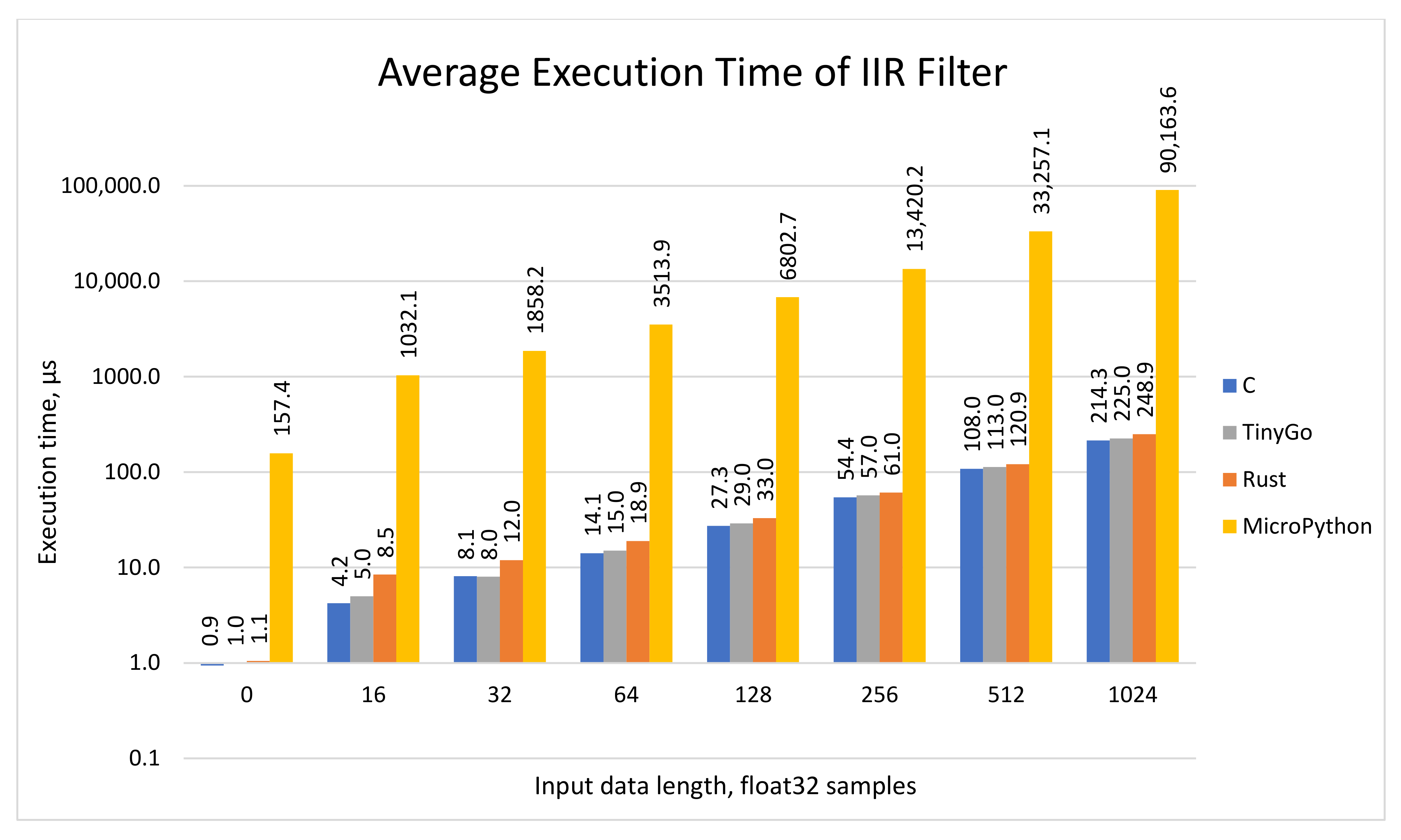
| IIR | [44] | float32 | biquad type | Presence in more than one benchmark (EEMBC, BEEBS) Availability in vendor libraries Ease of use and verification | Telecommunication Consumer Automotive |
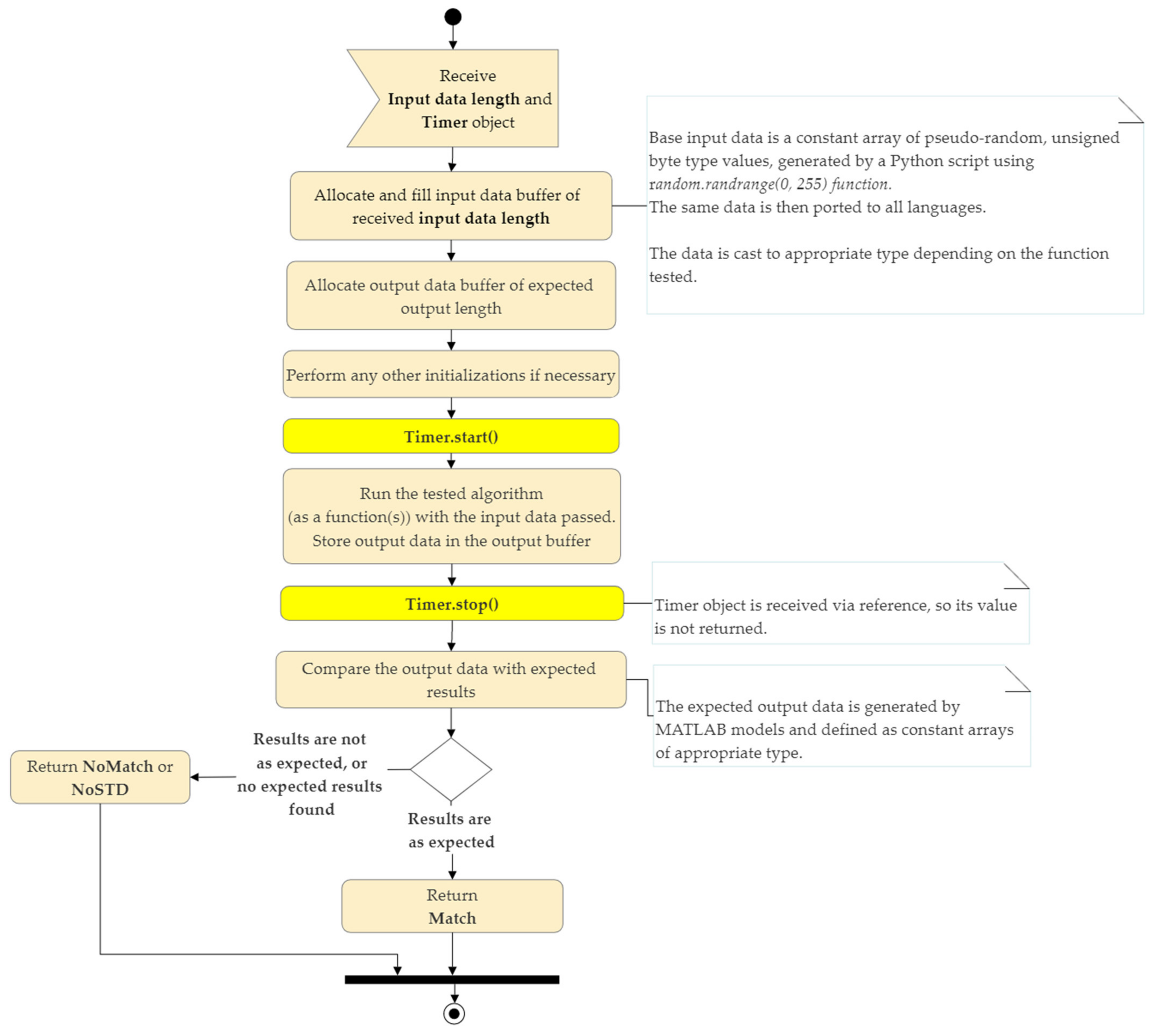
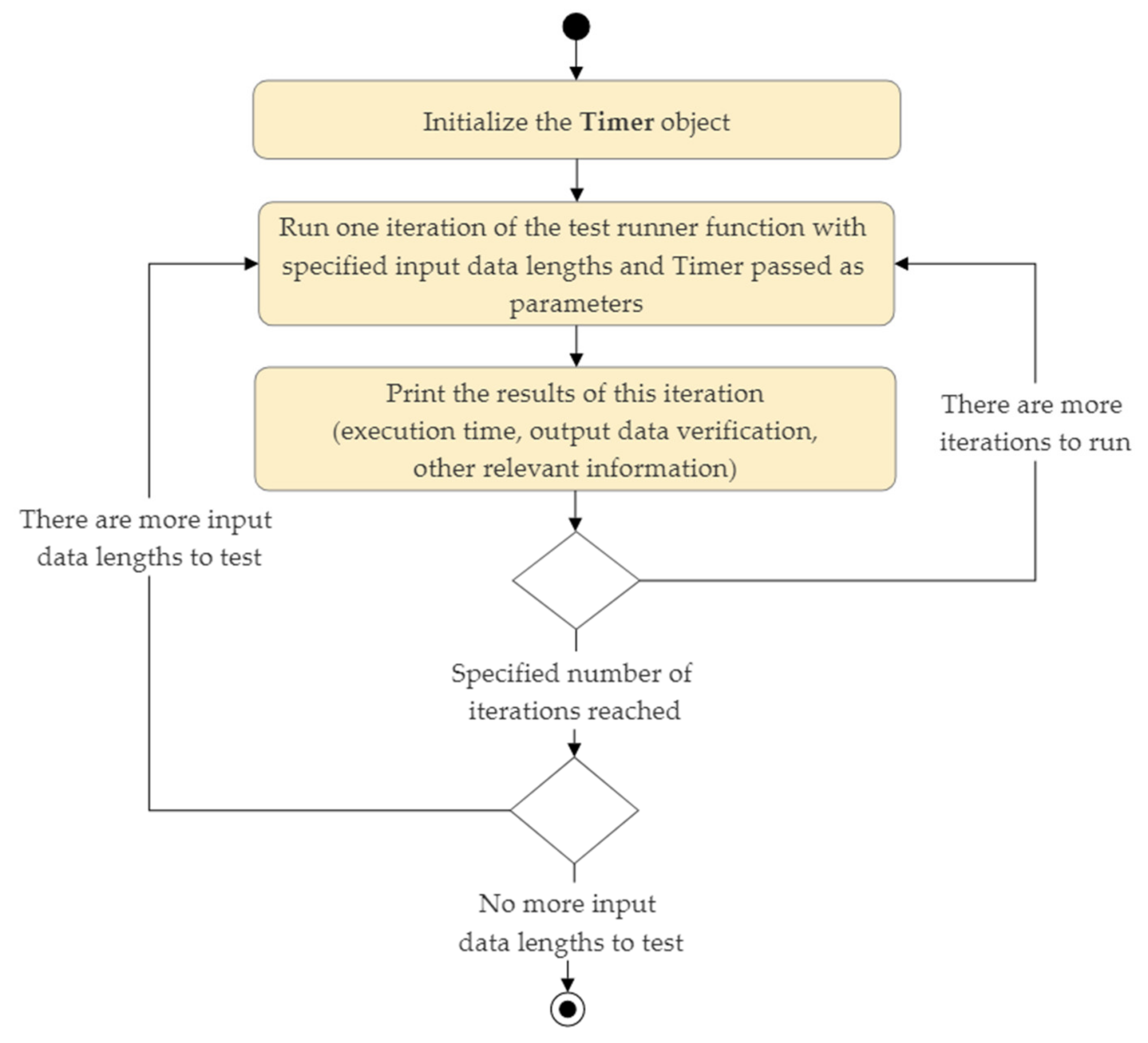
2.4. Performance Comparison Methodology
STRUCTURE Timer : a
tStart : Time value
tDuration : Time value
FUNCTION start(timer : TIMER) :
timer.tStart = current time
FUNCTION stop(timer : TIMER) :
timer.tDuration = calculated with timer.tStart as a
reference
TYPE RunFp : FUNCTION RezVerification( data_len : Integer, Timer : TimerObject/Struct)
STRUCTURE Tester : TestName : String TestLengths : Integer array Niterations : Unsigned integer array Ptype : Test result printing type (Readable, CSV) RunFn : RunFp (Test runner function) FUNCTION bench_Run (test : Tester) : INITIALIZE timer : Timer FOR data length IN test.TestLengths : FOR: iteration number IN test.Niterations : test result : RezVerification = run test.RunFn(data length, timer) PRINT( Language Name test.test nameCPU frequency Iteration number timer.tDuration in microseconds test result)
2.5. Hardware Setup
2.6. Software Development Environments and Compilers
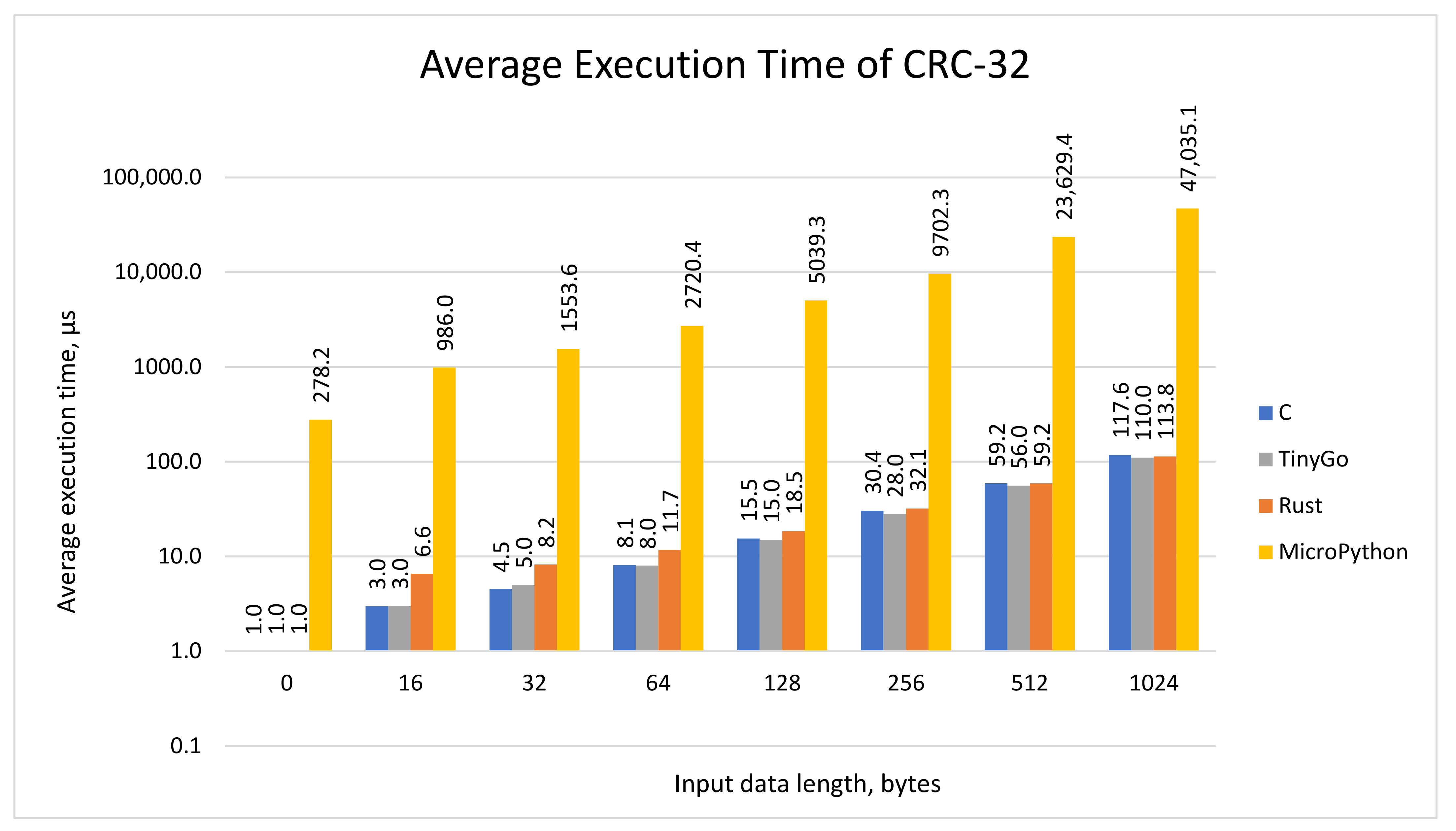
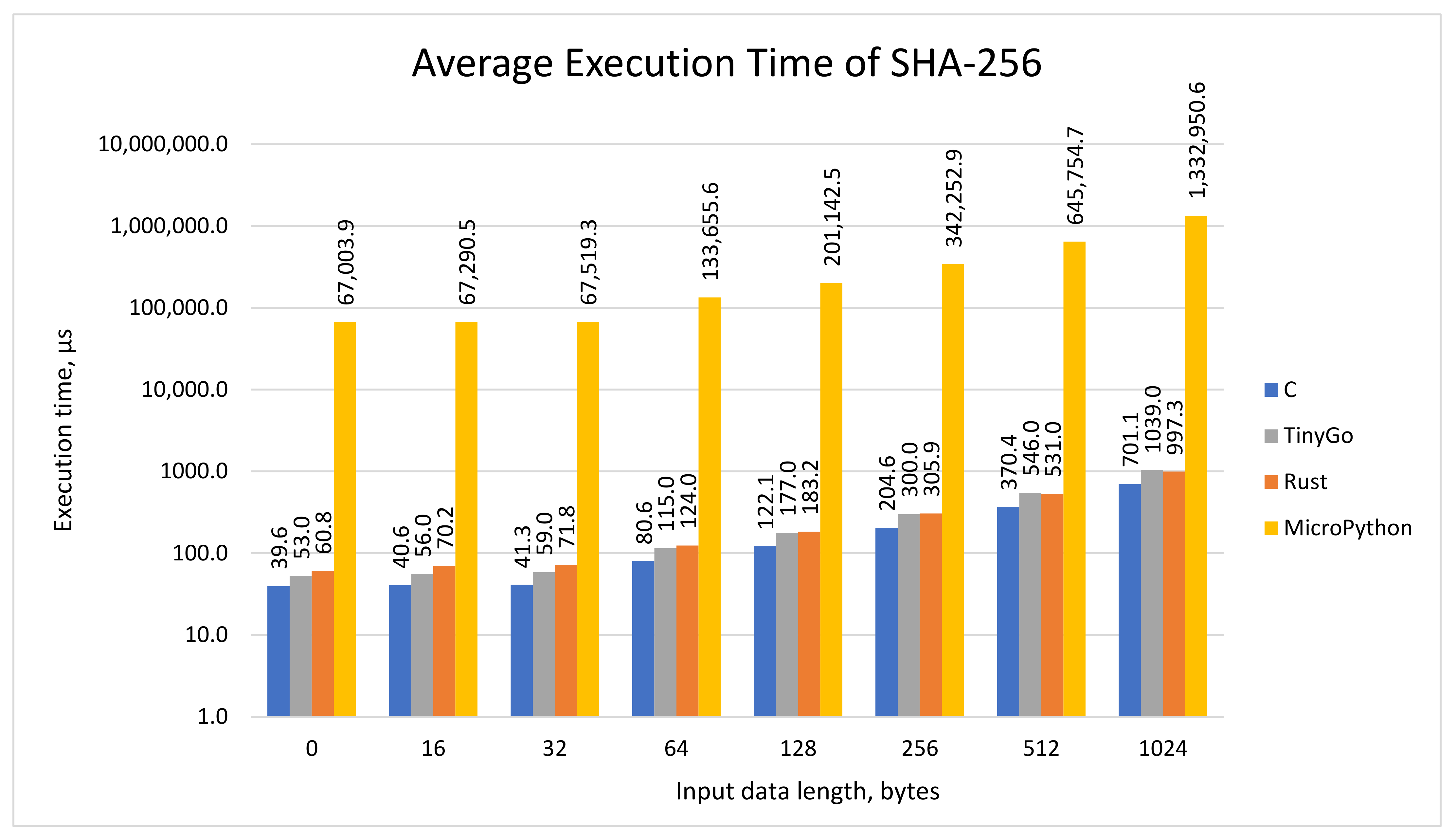
3. Results
4. Discussion
- CRC-32 implementations with data sizes of 64, 128, 256, 512, 1024;
- FIR filter implementations with all data sizes, except 0 (just a function/method call with zero data);
- IIR filter implementations with data size 32.
4.1. Limitations
4.2. Threats to Validity
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Maier, A.; Sharp, A.; Vagapov, Y. Comparative Analysis and Practical Implementation of the ESP32 Microcontroller Module for the Internet of Things. In Proceedings of the 2017 Internet Technologies and Applications (ITA), Wrexham, UK, 12–15 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 143–148. [Google Scholar]
- Aghenta, L.O.; Tariq Iqbal, M. Design and Implementation of a Low-Cost, Open Source IoT-Based SCADA System Using ESP32 with OLED, ThingsBoard and MQTT Protocol. AIMS Electron. Electr. Eng. 2020, 4, 57–86. [Google Scholar] [CrossRef]
- Aghenta, L.O.; Iqbal, M.T. Low-Cost, Open Source IoT-Based SCADA System Design Using Thinger.IO and ESP32 Thing. Electronics 2019, 8, 822. [Google Scholar] [CrossRef] [Green Version]
- Allafi, I.; Iqbal, T. Design and Implementation of a Low Cost Web Server Using ESP32 for Real-Time Photovoltaic System Monitoring. In Proceedings of the 2017 IEEE Electrical Power and Energy Conference (EPEC), Saskatoon, SK, Canada, 22–25 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Carducci, C.G.C.; Monti, A.; Schraven, M.H.; Schumacher, M.; Mueller, D. Enabling ESP32-Based IoT Applications in Building Automation Systems. In Proceedings of the 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4.0&IoT), Naples, Italy, 4–6 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 306–311. [Google Scholar]
- Sangeethalakshmi, K.; Preethi Angel, S.; Preethi, U.; Pavithra, S.; Shanmuga Priya, V. Patient Health Monitoring System Using IoT. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Taştan, M.; Gökozan, H. Real-Time Monitoring of Indoor Air Quality with Internet of Things-Based E-Nose. Appl. Sci. 2019, 9, 3435. [Google Scholar] [CrossRef]
- Bipasha Biswas, S.; Tariq Iqbal, M. Solar Water Pumping System Control Using a Low Cost ESP32 Microcontroller. In Proceedings of the 2018 IEEE Canadian Conference on Electrical & Computer Engineering (CCECE), Quebec, QC, Canada, 13–16 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Hangan, A.; Chiru, C.-G.; Arsene, D.; Czako, Z.; Lisman, D.F.; Mocanu, M.; Pahontu, B.; Predescu, A.; Sebestyen, G. Advanced Techniques for Monitoring and Management of Urban Water Infrastructures—An Overview. Water 2022, 14, 2174. [Google Scholar] [CrossRef]
- Ionescu, V.M.; Enescu, F.M. Investigating the Performance of MicroPython and C on ESP32 and STM32 Microcontrollers. In Proceedings of the 26th International Symposium for Design and Technology in Electronic Packaging (SIITME), Pitesti, Romania, 21 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 234–237. [Google Scholar]
- Dokic, K.; Radisic, B.; Cobovic, M. MicroPython or Arduino C for ESP32-Efficiency for Neural Network Edge Devices. In Intelligent Computing Systems; Brito-Loeza, C., Espinosa-Romero, A., Martin-Gonzalez, A., Safi, A., Eds.; Communications in Computer and Information Science; Springer International Publishing: Cham, Switzerland, 2020; Volume 1187, pp. 33–43. ISBN 978-3-030-43363-5. [Google Scholar]
- Grunert, K. Overview of JavaScript Engines for Resource-Constrained Microcontrollers. In Proceedings of the 5th International Conference on Smart and Sustainable Technologies (SpliTech), Split, Croatia, 23 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–7. [Google Scholar]
- Suarez-Albela, M.; Fernandez-Carames, T.M.; Fraga-Lamas, P.; Castedo, L. A Practical Performance Comparison of ECC and RSA for Resource-Constrained IoT Devices. In Proceedings of the Global Internet of Things Summit (GIoTS), Bilbao, Spain, 4–7 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Kodithuwakku, J.; Arachchi, D.D.; Thiha, S.; Rajasekera, J. Two Optimized IoT Device Architectures Based on Fast Fourier Transform to Monitor Patient’s Photoplethysmography and Body Temperature. Comput. Sci. Math. Forum 2022, 2, 7. [Google Scholar]
- Fabregat, G.; Belloch, J.A.; Badia, J.M.; Cobos, M. Design and Implementation of Acoustic Source Localization on a Low-Cost IoT Edge Platform. IEEE Trans. Circuits Syst. II 2020, 67, 3547–3551. [Google Scholar] [CrossRef]
- Shinde, A.R.; Mundada, K. Bike Engine Health Monitoring Using Vibration. In Proceedings of the 2020 IEEE Pune Section International Conference (PuneCon), Pune, India, 16 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 99–102. [Google Scholar]
- Aho, A.V.; Aho, A.V. (Eds.) Compilers: Principles, Techniques, and Tools, 2nd ed.; Pearson/Addison Wesley: Boston, MA, USA, 2007; ISBN 978-0-321-48681-3. [Google Scholar]
- Kernighan, B.W.; Ritchie, D.M. The C Programming Language, 2nd ed.; Prentice Hall: Englewood Cliffs, NJ, USA, 1988; ISBN 978-0-13-308621-8. [Google Scholar]
- FreeRTOS. Available online: https://docs.espressif.com/projects/esp-idf/en/latest/esp32/api-reference/system/freertos.html (accessed on 15 November 2022).
- Arduino Core for the ESP32, ESP32-S2, ESP32-S3 and ESP32-C3. Available online: https://github.com/espressif/arduino-esp32 (accessed on 15 November 2022).
- Klabnik, S.; Nichols, C. The Rust Programming Language; No Starch Press: San Francisco, CA, USA, 2018; ISBN 978-1-59327-828-1. [Google Scholar]
- Bugden, W.; Alahmar, A. Rust: The Programming Language for Safety and Performance. arXiv 2022, arXiv:2206.05503. [Google Scholar] [CrossRef]
- The Cargo Book. Available online: https://doc.rust-lang.org/cargo/index.html (accessed on 15 November 2022).
- The Rust on ESP Book. Available online: https://esp-rs.github.io/book/introduction.html (accessed on 15 November 2022).
- Rust Bindings for ESP-IDF. Available online: https://github.com/esp-rs/esp-idf-sys (accessed on 15 November 2022).
- Platform Support. Rustc. Available online: https://www.rust-lang.org/ (accessed on 15 November 2022).
- TinyGo. Available online: https://tinygo.org/ (accessed on 15 November 2022).
- Meyerson, J. The Go Programming Language. IEEE Softw. 2014, 31, 104. [Google Scholar] [CrossRef] [Green Version]
- Why Go Instead of Rust? Available online: https://tinygo.org/docs/concepts/faq/why-go-instead-of-rust/ (accessed on 15 November 2022).
- TinyGo Runtime Scheduler.Go. Available online: https://github.com/tinygo-org/tinygo/blob/release/src/runtime/scheduler.go (accessed on 15 November 2022).
- Packages Supported by TinyGo. Available online: https://tinygo.org/docs/reference/lang-support/stdlib/ (accessed on 15 November 2022).
- Adi, P.D.P.; Kitagawa, A. A Review of the Blockly Programming on M5Stack Board and MQTT Based for Programming Education. In Proceedings of the IEEE 11th International Conference on Engineering Education (ICEED), Kanazawa, Japan, 6–7 November 2019; pp. 102–107. [Google Scholar]
- George, D.P.; Sokolovsky, P. MicroPython Documentation. Release 1.10. Available online: https://docs.micropython.org/en/v1.10/micropython-docs.pdf (accessed on 15 November 2022).
- Quick Reference for the ESP32. Available online: https://docs.micropython.org/en/latest/esp32/quickref.html (accessed on 15 November 2022).
- MicroPython-Python for Microcontrollers ESP32. Available online: http://www.micropython.org/download/esp32/ (accessed on 15 November 2022).
- Pallister, J.; Hollis, S.; Bennett, J. BEEBS: Open Benchmarks for Energy Measurements on Embedded Platforms. arXiv 2013, arXiv:1308.5174. [Google Scholar]
- Guthaus, M.R.; Ringenberg, J.S.; Ernst, D.; Austin, T.M.; Mudge, T.; Brown, R.B. MiBench: A Free, Commercially Representative Embedded Benchmark Suite. In Proceedings of the 4th Annual IEEE International Workshop on Workload Characterization, WWC-4 (Cat. No.01EX538), Austin, TX, USA, 2 December 2001; pp. 3–14. [Google Scholar]
- Poovey, J.A.; Conte, T.M.; Levy, M.; Gal-On, S. A Benchmark Characterization of the EEMBC Benchmark Suite. IEEE Micro 2009, 29, 18–29. [Google Scholar] [CrossRef]
- Espressif DSP Library. Available online: https://docs.espressif.com/projects/esp-dsp/en/latest/esp-dsp-library.html (accessed on 15 November 2022).
- The Go Authors. CRC32 Algorithm Implementation. Crc32_generic.Go. Available online: https://cs.opensource.google/go/go/+/refs/tags/go1.19.3:src/hash/crc32/crc32_generic.go (accessed on 15 November 2022).
- Conte, B. Sha256.c. Available online: https://github.com/B-Con/crypto-algorithms/blob/master/sha256_test.c (accessed on 15 November 2022).
- Espressif Systems. FFT Algorithm Implementation. Dsps_fft2r_sc16_ansi.c. Available online: https://github.com/espressif/esp-dsp/blob/master/modules/fft/fixed/dsps_fft2r_sc16_ansi.c (accessed on 15 November 2022).
- Espressif Systems. FIR Algorithm Implementation. dsps_fir_f32_ansi.c. Available online: https://github.com/espressif/esp-dsp/blob/master/modules/fir/float/dsps_fir_f32_ansi.c (accessed on 15 November 2022).
- Espressif Systems. IIR Algorithm Implementation. Dsps_biquad_f32_ansi.c. Available online: https://github.com/espressif/esp-dsp/blob/master/modules/iir/biquad/dsps_biquad_f32_ansi.c (accessed on 15 November 2022).
- Linker Script for the ESP32. Available online: https://github.com/tinygo-org/tinygo/blob/release/targets/esp32.ld (accessed on 15 November 2022).
- ESP32 Product Page. Available online: https://www.espressif.com/en/products/socs/esp32 (accessed on 15 November 2022).
- The Internet of Things with ESP32. Available online: http://esp32.net/ (accessed on 15 November 2022).
- Flashing Firmware. Available online: https://docs.espressif.com/projects/esptool/en/latest/esp32s3/esptool/flashing-firmware.html (accessed on 15 November 2022).
- Visual Studio Code. Version 1.73. Available online: https://code.visualstudio.com/ (accessed on 15 November 2022).
- Annamaa, A. Thonny: A Python IDE for Learning Programming. In Proceedings of the 2015 ACM Conference on Innovation and Technology in Computer Science Education, Vilnius, Lithuania, 22 June 2015; ACM: New York, NY, USA, 2015; p. 343. [Google Scholar]
- Professional Collaborative Platform for Embedded Development. Available online: https://platformio.org/ (accessed on 15 November 2022).
- Rust.Analyzer. Available online: https://rust-analyzer.github.io/ (accessed on 15 November 2022).
- Rust on ESP-IDF “Hello, World” Template. Available online: https://github.com/esp-rs/esp-idf-template (accessed on 15 November 2022).
- Visual Studio Code Support for TinyGo. Available online: https://marketplace.visualstudio.com/items?itemName=tinygo.vscode-tinygo (accessed on 15 November 2022).
- TinyGo Install Guide on Linux. Available online: https://tinygo.org/getting-started/install/linux/ (accessed on 15 November 2022).
- Go 1.14 Release Notes. Available online: https://go.dev/doc/go1.14 (accessed on 15 November 2022).
- Go Language Features. Available online: https://tinygo.org/docs/reference/lang-support/ (accessed on 15 November 2022).









| Language | ESP32 Peripherals Support | Language Features Support on ESP32 | Memory Management | Compiler for ESP32 | Runtime System on ESP32 |
|---|---|---|---|---|---|
| C/C++ | Full | Full | Manual/Automatic | GCC | C/C++ standard library on FreeRTOS |
| Rust | High | High | Fully automatic | LLVM | Rust standard library on FreeRTOS |
| TinyGo | Limited | Limited | Garbage collection | LLVM | Go standard library on bare-metal |
| MicroPython | Medium | Limited | Garbage collection | Interpreted | MicroPython interpreter on FreeRTOS |
| Language | Function for tStart | Function to Calculate Duration |
|---|---|---|
| C/C++ | esp_timer_get_time() | esp_timer_get_time()—tStart |
| Rust | esp_idf_sys::esp_timer_get_time(); | esp_idf_sys::esp_timer_get_time()—self.tStart |
| TinyGo | time.Now() | time.Since(tStart) |
| MicroPython | utime.ticks_us() | ticks_diff(ticks_us(), tStart) |
| Language | IDE | Relevant Toolchain Versions |
|---|---|---|
| C/C++ | VS Code with plugins: PlatformIO v2.5.5 and Espressif 32 v5.2.0 C/C++ v1.12.4 Arduino framework | no additional version output available, toolchain is fully managed by Espressif platform via PlatformIO |
| Rust | VS Code with plugins: rust-analyzer v0.3.1285 | Xtensa toolchain: esp-2021r2-patch5-8_4_0 cargo 1.65.0-nightly (4bc8f24d3 20 October 2022) rustc 1.65.0-nightly (5b08d0476 4 November 2022) esp-idf-sys 0.31.9 |
| TinyGo | VS Code with plugins: TinyGo v0.4.0 Go v0.36.0 | Tinygo—version 0.25.0 linux/amd64 (using go version go1.19.1 and LLVM version 14.0.0) |
| MicroPython | Thonny v4.0.1 | micropython 3.4.0; MicroPython v1.19.1 on 18 June 2022 |
| Algorithm | Input Data Length | C | TinyGo | Rust | MicroPython | ||||
|---|---|---|---|---|---|---|---|---|---|
| Time AVG, µs | SD, µs | Time AVG, µs | SD, µs | Time AVG, µs | SD, µs | Time AVG, µs | SD, µs | ||
| CRC-32 | 0 | 1.0 | 0.1 | 1.0 | 0.0 | 1.0 | 0.0 | 278.2 | 15.2 |
| 16 | 3.0 | 1.6 | 3.0 | 0.0 | 6.6 | 0.6 | 986.0 | 12.7 | |
| 32 | 4.5 | 0.5 | 5.0 | 0.0 | 8.2 | 0.6 | 1553.6 | 10.9 | |
| 64 | 8.1 | 0.3 | 8.0 | 0.0 | 11.7 | 0.6 | 2720.4 | 11.4 | |
| 128 | 15.5 | 1.2 | 15.0 | 0.0 | 18.5 | 0.6 | 5039.3 | 12.4 | |
| 256 | 30.4 | 2.7 | 28.0 | 0.0 | 32.1 | 0.5 | 9702.3 | 10.4 | |
| 512 | 59.2 | 2.7 | 56.0 | 0.0 | 59.2 | 0.6 | 23,629.4 | 11.3 | |
| 1024 | 117.6 | 3.8 | 110.0 | 0.0 | 113.8 | 0.9 | 47,035.1 | 12.7 | |
| SHA-256 | 0 | 39.6 | 2.7 | 53.0 | 0.0 | 60.8 | 2.2 | 67,003.9 | 42.1 |
| 16 | 40.6 | 2.8 | 56.0 | 0.0 | 70.2 | 2.4 | 67,290.5 | 6.8 | |
| 32 | 41.3 | 2.0 | 59.0 | 0.0 | 71.8 | 2.7 | 67,519.3 | 6.7 | |
| 64 | 80.6 | 3.0 | 115.0 | 0.0 | 124.0 | 2.8 | 133,655.6 | 28.1 | |
| 128 | 122.1 | 3.8 | 177.0 | 0.0 | 183.2 | 2.7 | 201,142.5 | 40.0 | |
| 256 | 204.6 | 4.5 | 300.0 | 0.0 | 305.9 | 2.9 | 342,252.9 | 87.6 | |
| 512 | 370.4 | 5.6 | 546.0 | 0.0 | 531.0 | 2.9 | 645,754.7 | 363.3 | |
| 1024 | 701.1 | 5.4 | 1039.0 | 0.0 | 997.3 | 4.5 | 1,332,950.6 | 990.8 | |
| FFT | 0 | 1.0 | 0.2 | 1.0 | 0.0 | 1.0 | 0.1 | 218.1 | 11.0 |
| 16 | 14.2 | 0.4 | 25.0 | 0.0 | 49.5 | 2.5 | 5693.5 | 7.6 | |
| 32 | 32.1 | 0.3 | 59.0 | 0.0 | 79.7 | 2.1 | 13,400.4 | 6.9 | |
| 64 | 73.6 | 2.7 | 134.0 | 0.0 | 161.3 | 2.2 | 31,284.2 | 4.7 | |
| 128 | 166.3 | 4.0 | 305.0 | 0.0 | 335.1 | 2.8 | 71,985.4 | 6.0 | |
| 256 | 373.0 | 5.5 | 683.0 | 0.0 | 726.4 | 6.0 | 168,833.7 | 4.2 | |
| 512 | 827.9 | 4.4 | 1515.0 | 0.0 | 1565.9 | 3.7 | 377,029.0 | 8.9 | |
| 1024 | 1821.5 | 4.3 | 3331.0 | 0.0 | 3525.5 | 21.0 | 844,854.8 | 15.0 | |
| FIR filter | 0 | 0.9 | 0.2 | 1.0 | 0.0 | 1.1 | 0.3 | 128.0 | 5.0 |
| 16 | 518.5 | 5.7 | 421.0 | 0.0 | 433.5 | 6.0 | 76,422.1 | 229.9 | |
| 32 | 1029.8 | 0.4 | 848.0 | 0.0 | 821.3 | 5.5 | 158,668.8 | 151.3 | |
| 64 | 2033.6 | 2.6 | 1720.0 | 0.0 | 1591.9 | 6.1 | 324,258.9 | 15.7 | |
| 128 | 3962.1 | 1.1 | 3541.0 | 0.0 | 3114.0 | 6.3 | 658,492.5 | 2062.2 | |
| 256 | 7514.6 | 5.5 | 7485.0 | 0.0 | 6083.1 | 6.4 | 1,366,597.5 | 33.1 | |
| 512 | 15,028.0 | 1.6 | 14,968.0 | 0.0 | 12,124.0 | 7.8 | 2,989,716.9 | 152.7 | |
| 1024 | 30,054.7 | 2.5 | 29,934.0 | 0.0 | 24,219.2 | 12.8 | 9,066,768.4 | 4479.6 | |
| IIR filter | 0 | 0.9 | 0.2 | 1.0 | 0.0 | 1.1 | 0.2 | 157.4 | 5.6 |
| 16 | 4.2 | 0.4 | 5.0 | 0.0 | 8.5 | 0.6 | 1032.1 | 4.7 | |
| 32 | 8.1 | 2.5 | 8.0 | 0.0 | 12.0 | 0.4 | 1858.2 | 5.9 | |
| 64 | 14.1 | 0.3 | 15.0 | 0.0 | 18.9 | 0.4 | 3513.9 | 7.2 | |
| 128 | 27.3 | 0.5 | 29.0 | 0.0 | 33.0 | 0.4 | 6802.7 | 6.1 | |
| 256 | 54.4 | 2.8 | 57.0 | 0.0 | 61.0 | 0.9 | 13,420.2 | 7.8 | |
| 512 | 108.0 | 3.9 | 113.0 | 0.0 | 120.9 | 1.1 | 33,257.1 | 15.6 | |
| 1024 | 214.3 | 4.4 | 225.0 | 0.0 | 248.9 | 4.3 | 90,163.6 | 28.7 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Plauska, I.; Liutkevičius, A.; Janavičiūtė, A. Performance Evaluation of C/C++, MicroPython, Rust and TinyGo Programming Languages on ESP32 Microcontroller. Electronics 2023, 12, 143. https://doi.org/10.3390/electronics12010143
Plauska I, Liutkevičius A, Janavičiūtė A. Performance Evaluation of C/C++, MicroPython, Rust and TinyGo Programming Languages on ESP32 Microcontroller. Electronics. 2023; 12(1):143. https://doi.org/10.3390/electronics12010143
Chicago/Turabian StylePlauska, Ignas, Agnius Liutkevičius, and Audronė Janavičiūtė. 2023. "Performance Evaluation of C/C++, MicroPython, Rust and TinyGo Programming Languages on ESP32 Microcontroller" Electronics 12, no. 1: 143. https://doi.org/10.3390/electronics12010143