
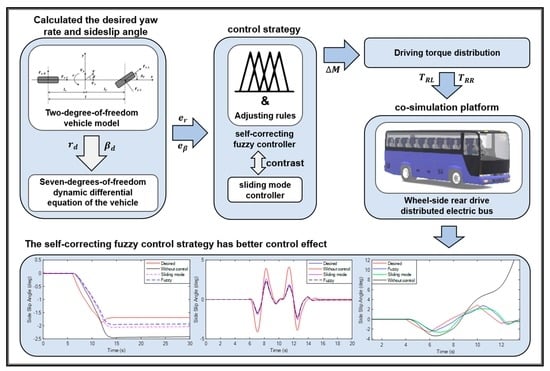
Design of a Wheel-Side Rear-Drive Distributed Electric Bus Control Strategy Based on Self-Correcting Fuzzy Control
Abstract
:
1. Introduction
2. Build Vehicle Dynamics Models
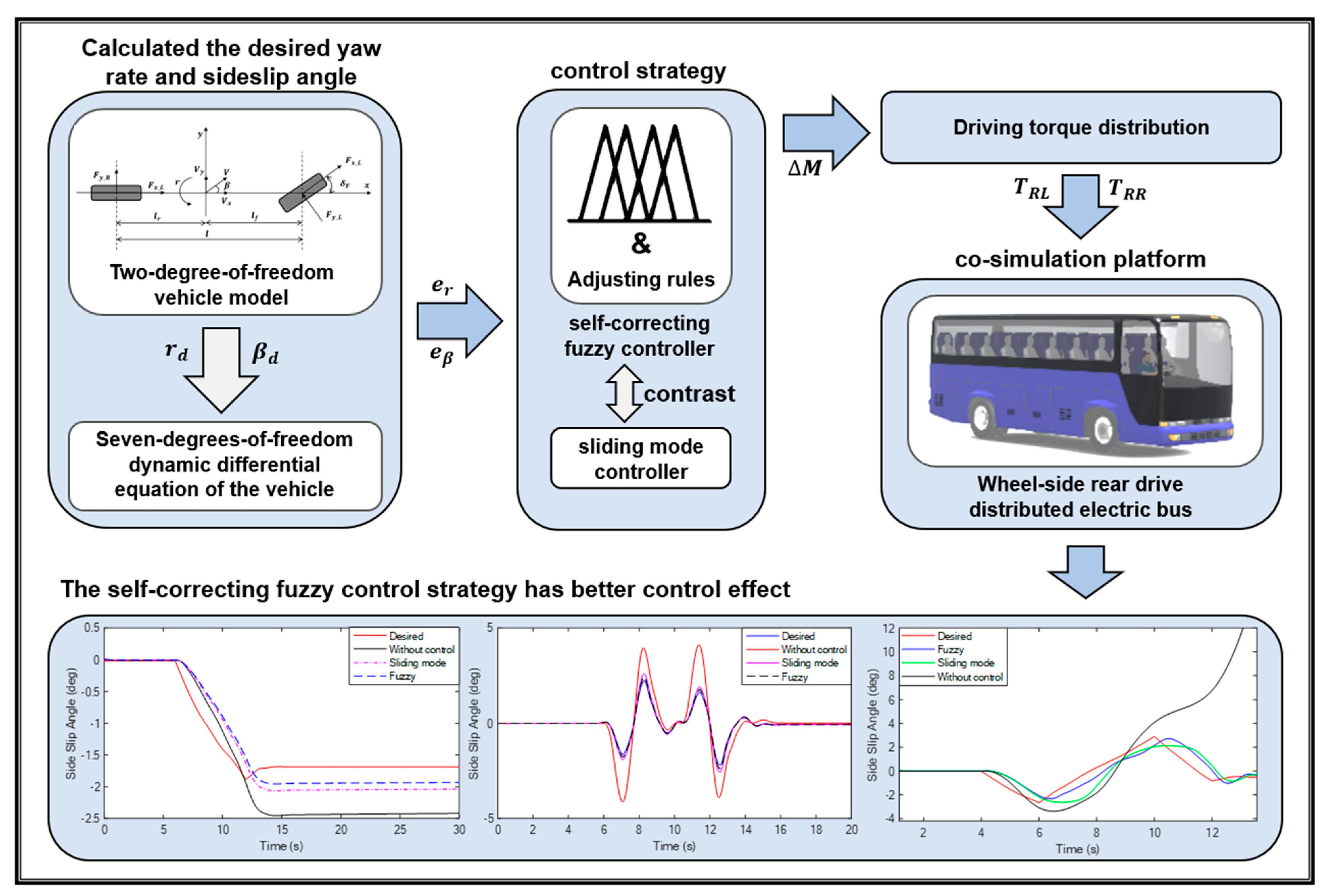
2.1. Reference Model
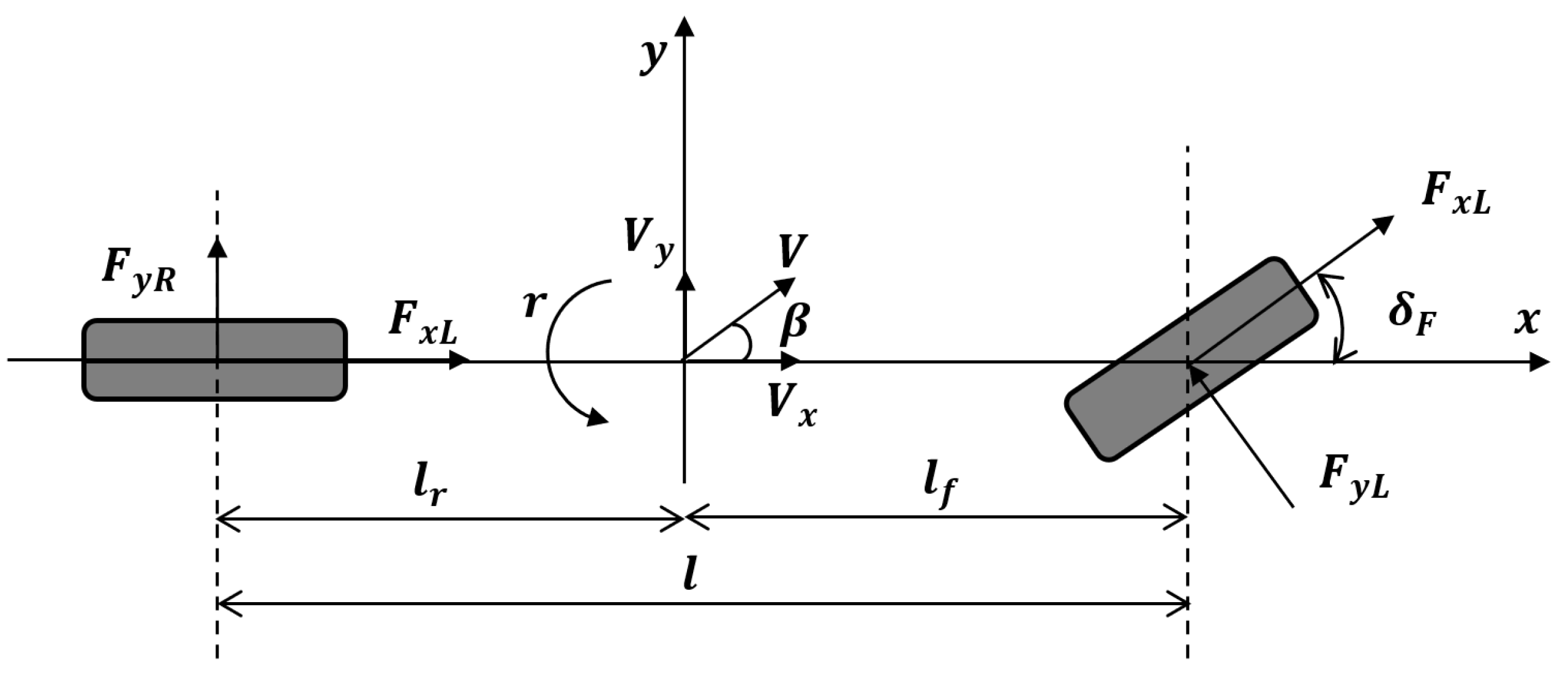
2.2. Seven-Degrees-of-Freedom Vehicle Model
2.3. Driving Torque Distribution
3. Distributed Drive Control System Design
3.1. Additional Yaw Moment Calculation Based on the Sliding Mode Controller
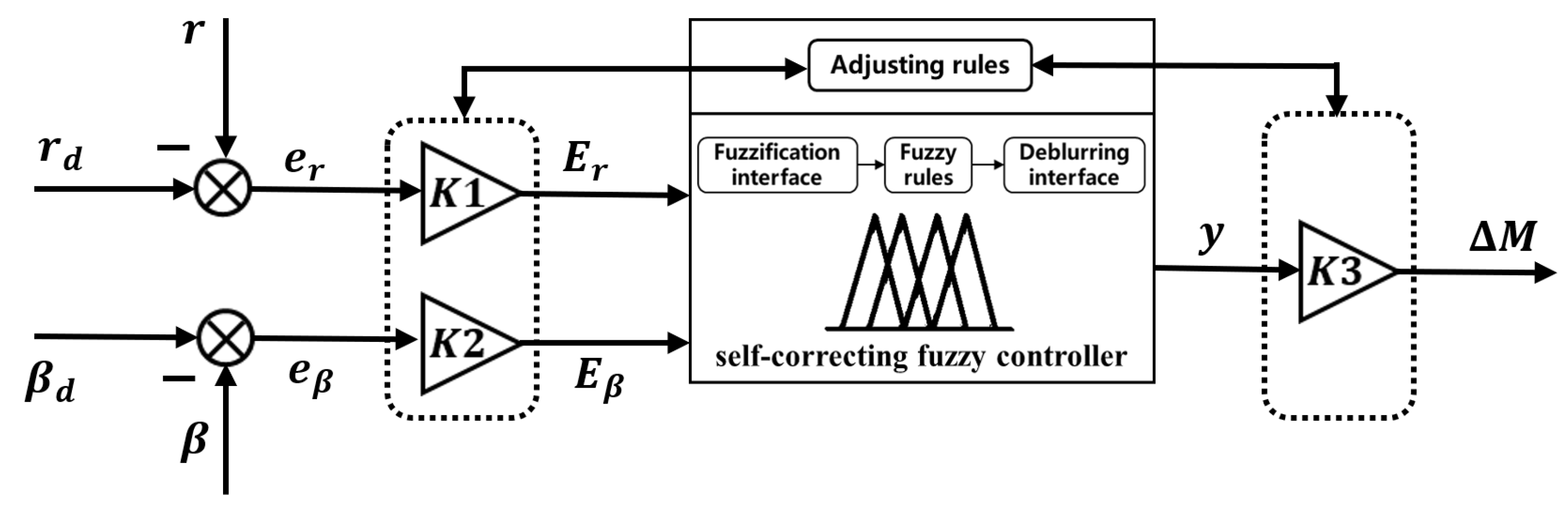
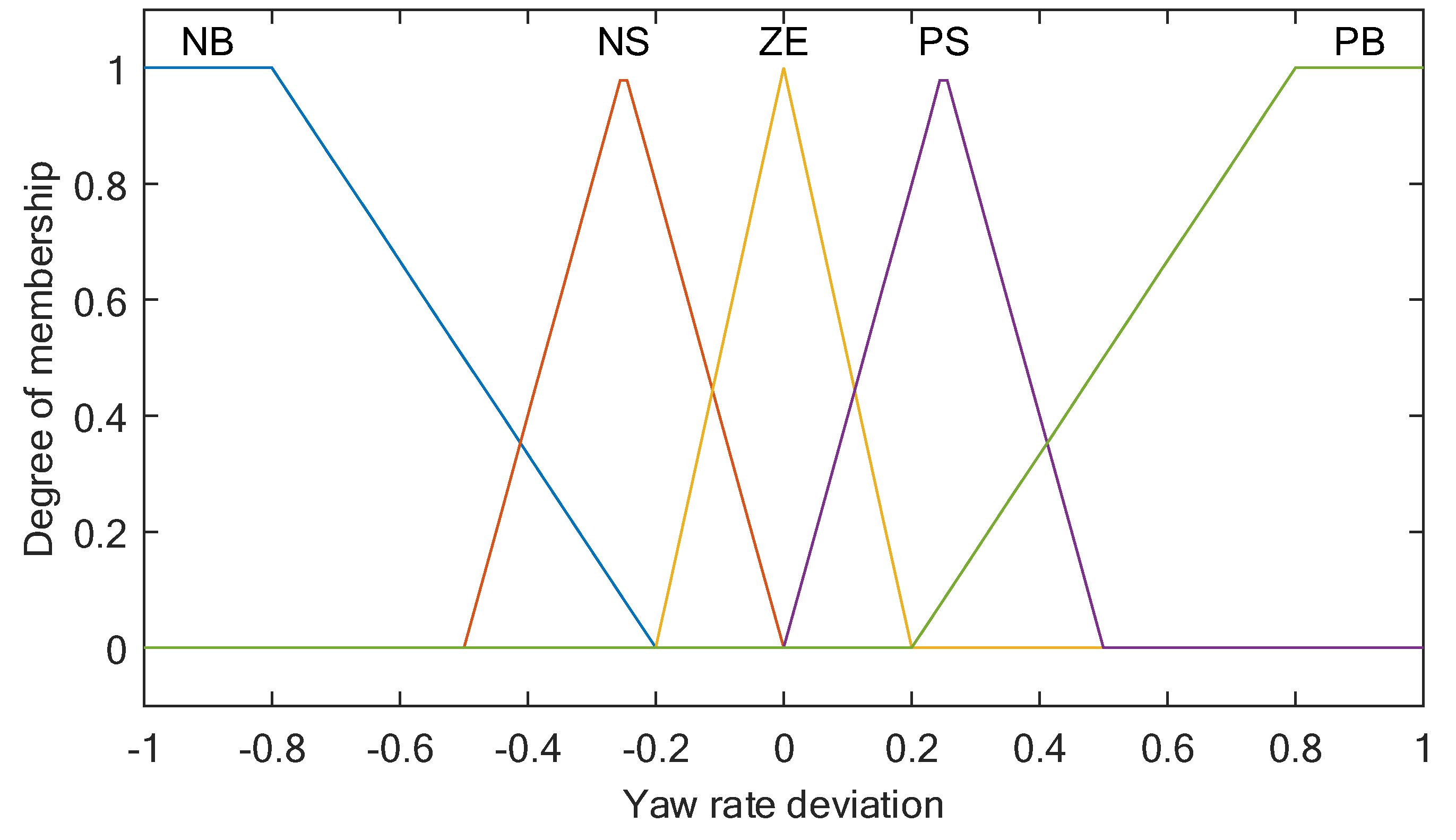
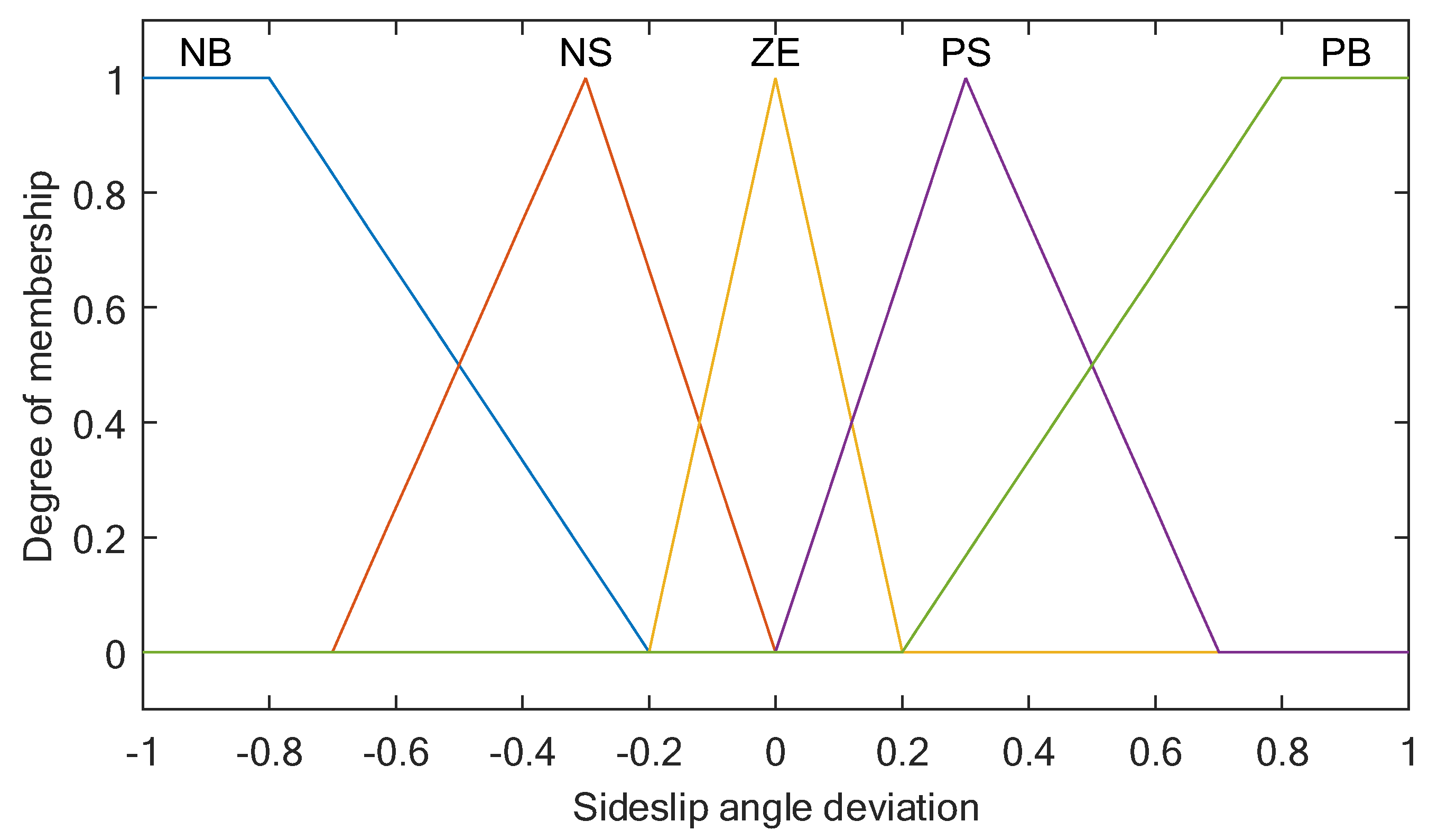
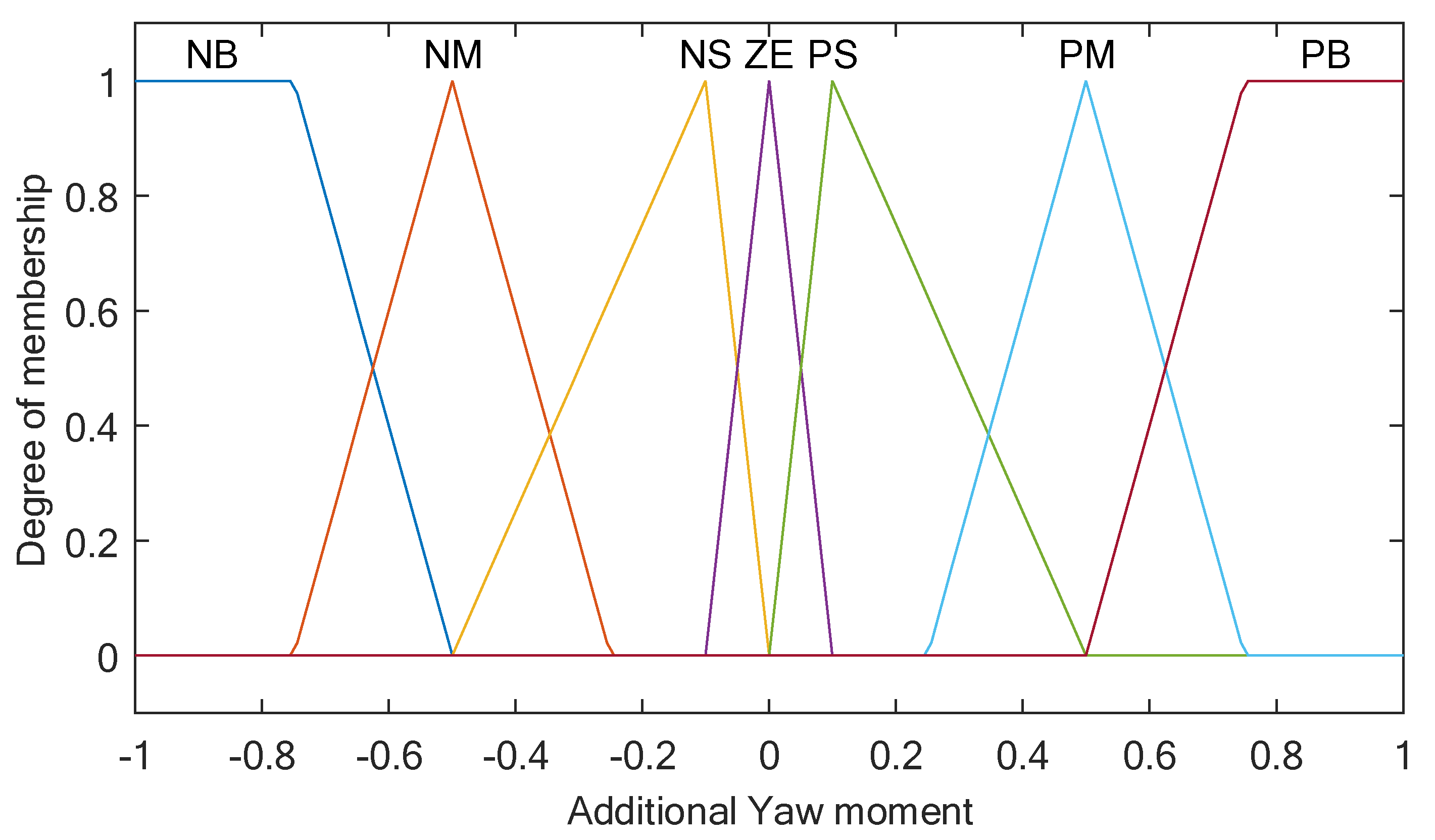
3.2. Additional Yaw Moment Calculation Based on the Self-Correcting Fuzzy Controller
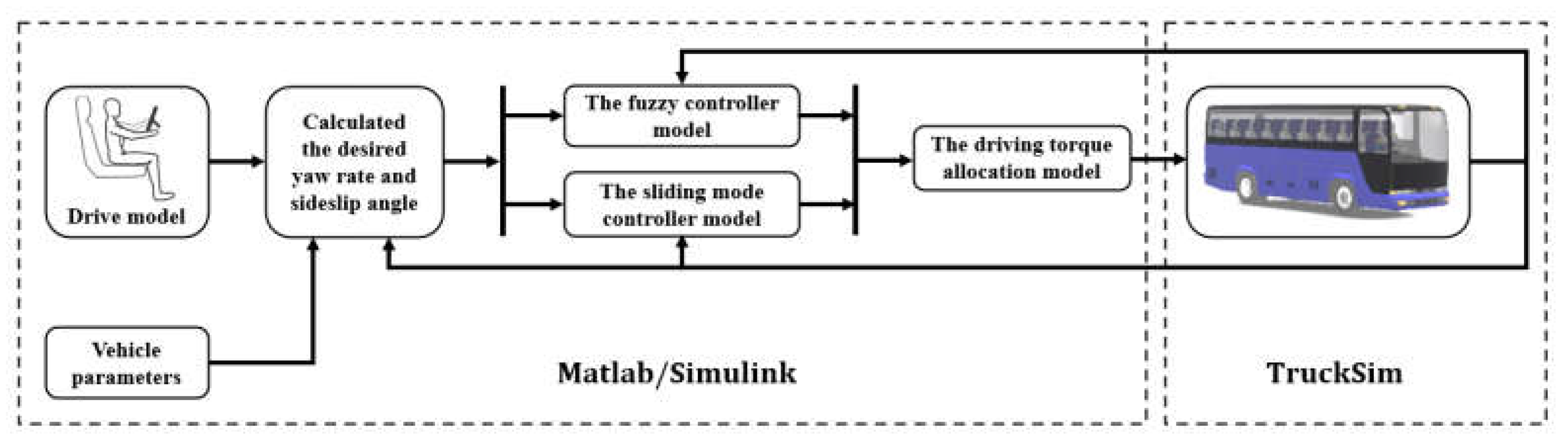
4. Simulation Analysis
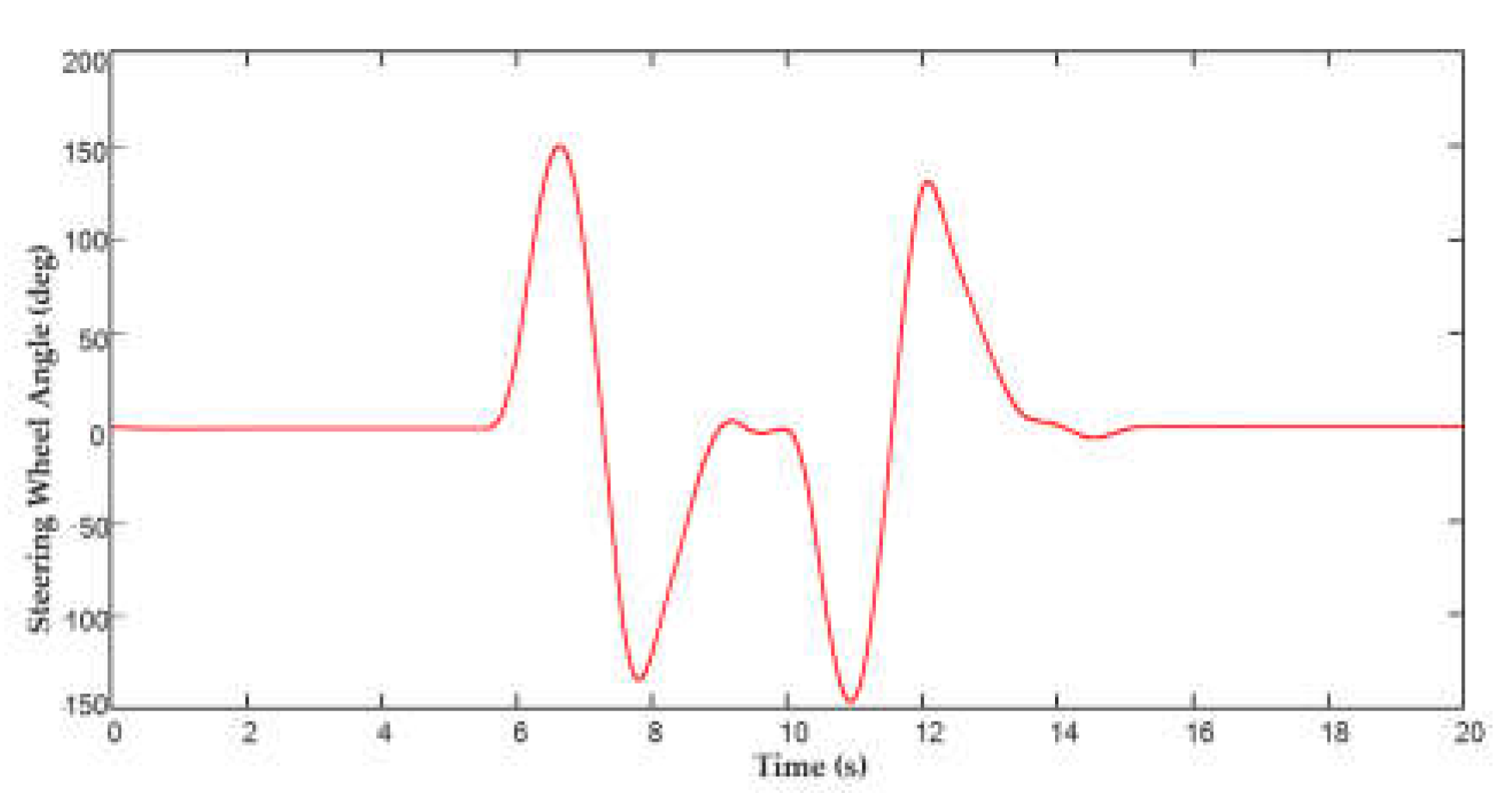
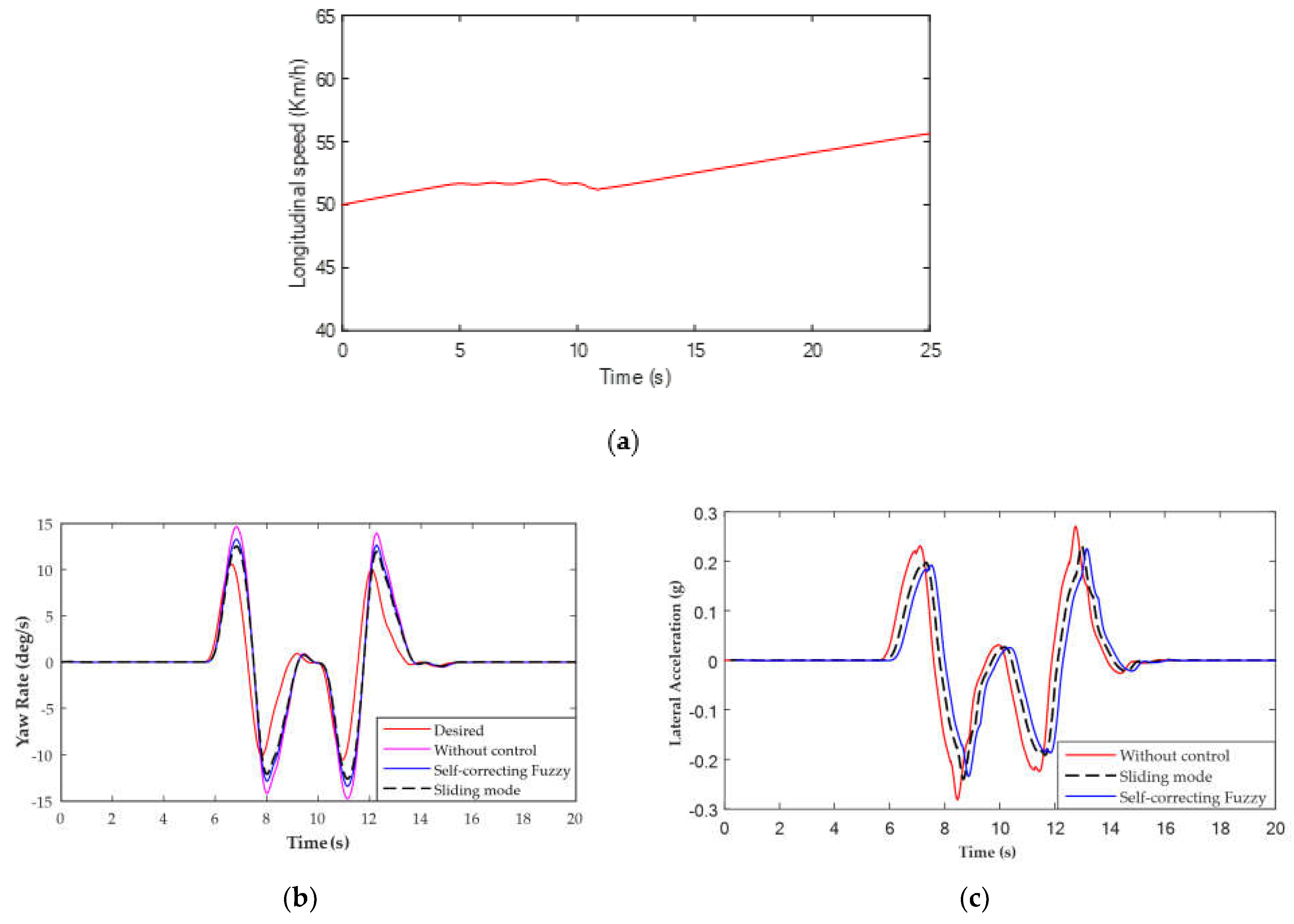
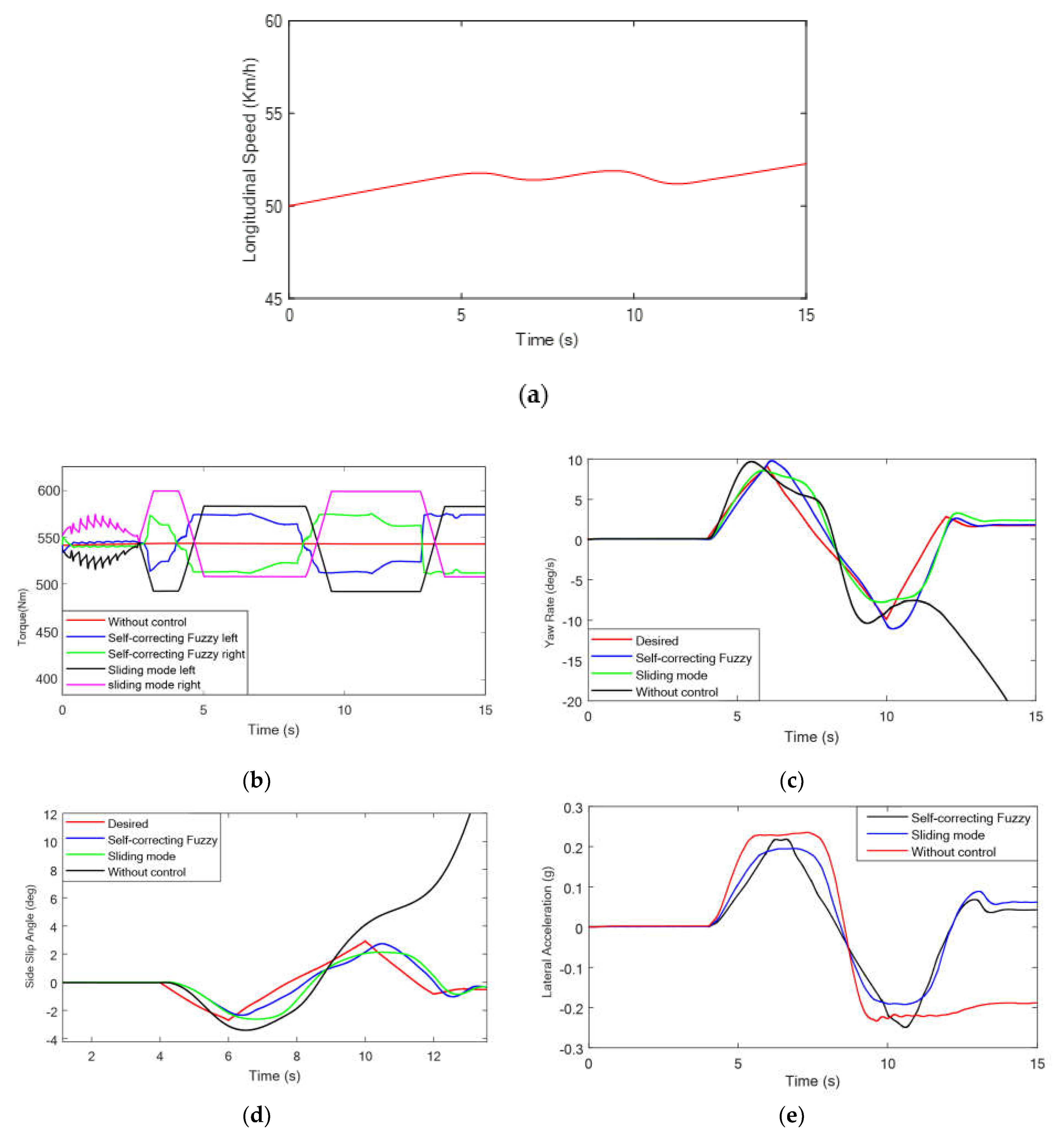
4.1. Double Shift Line Condition
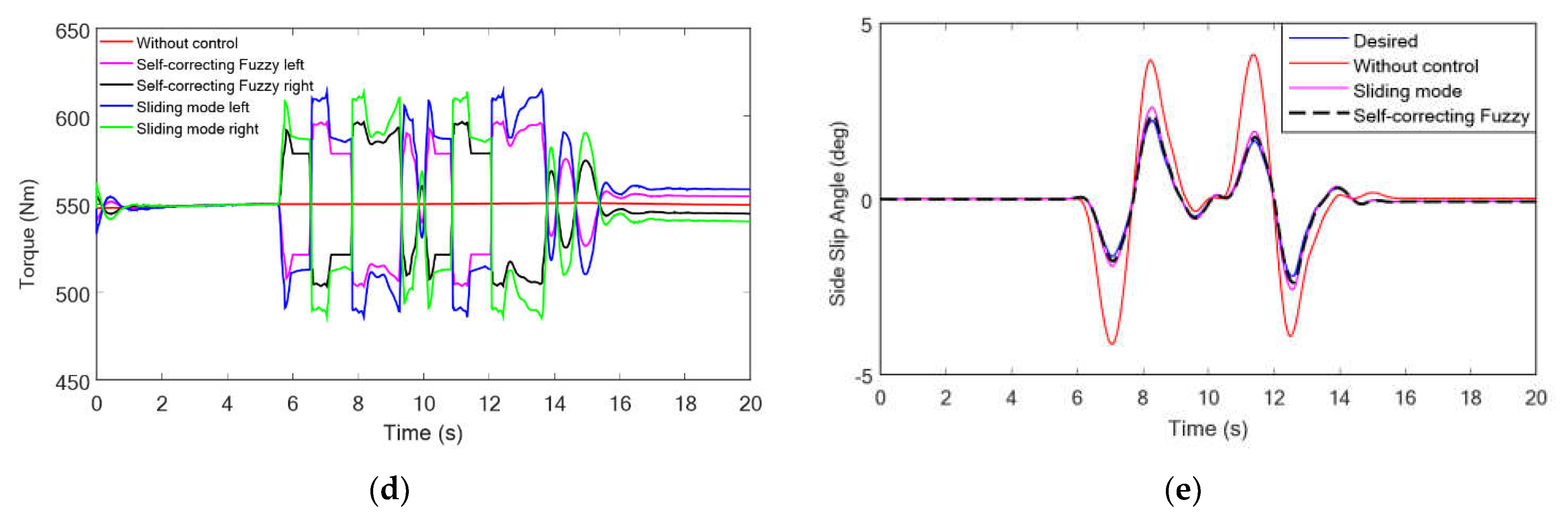
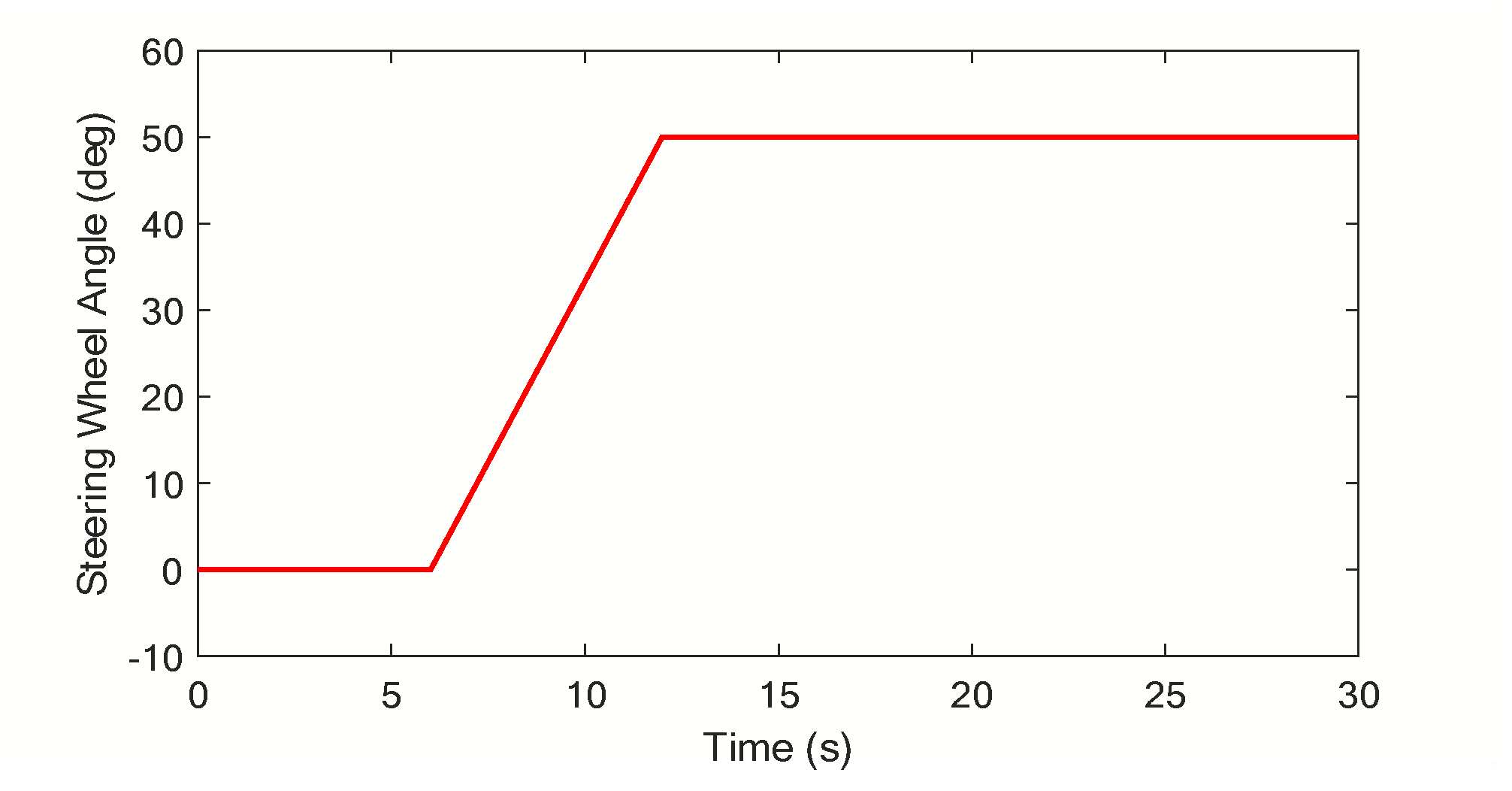
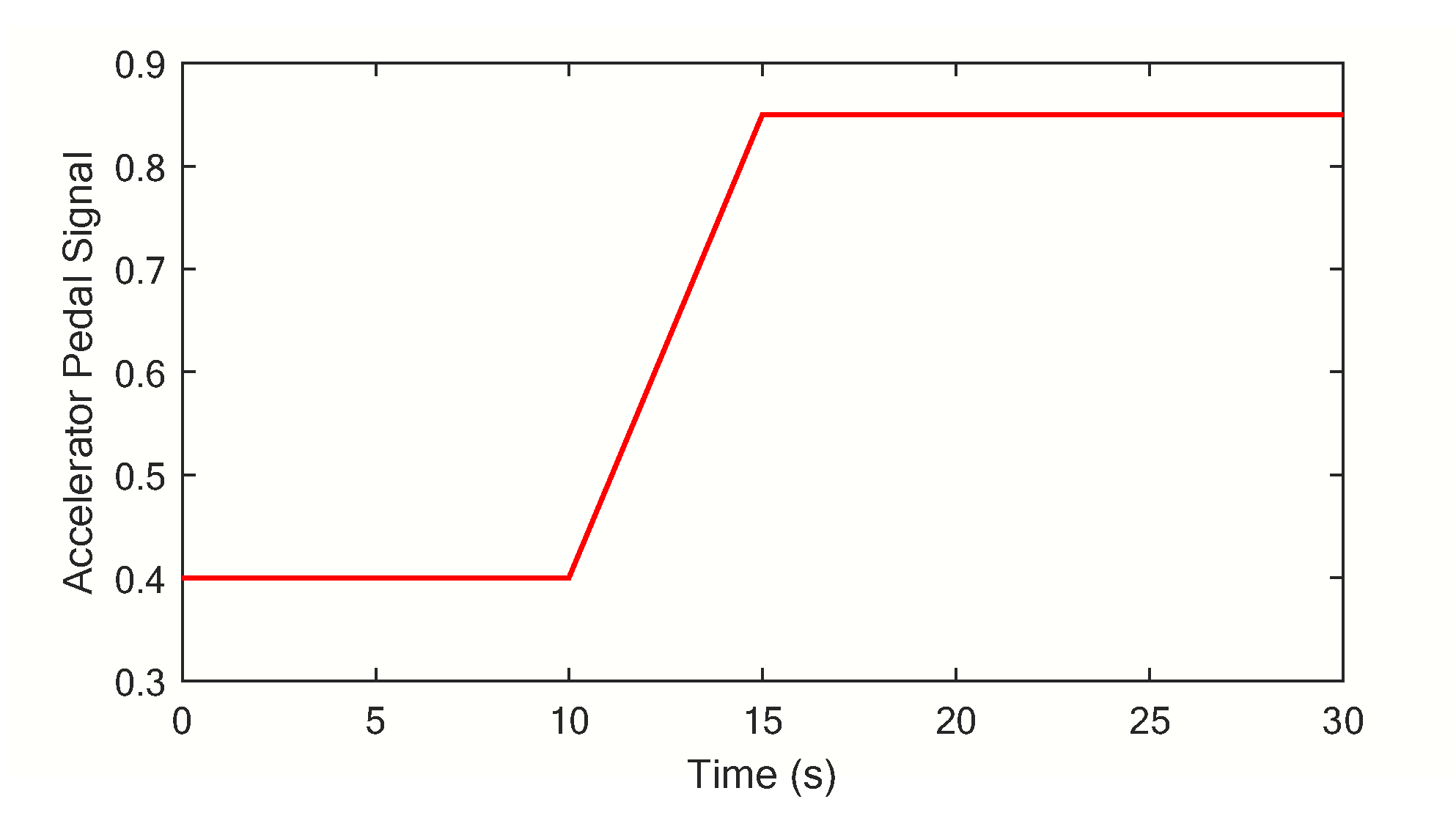
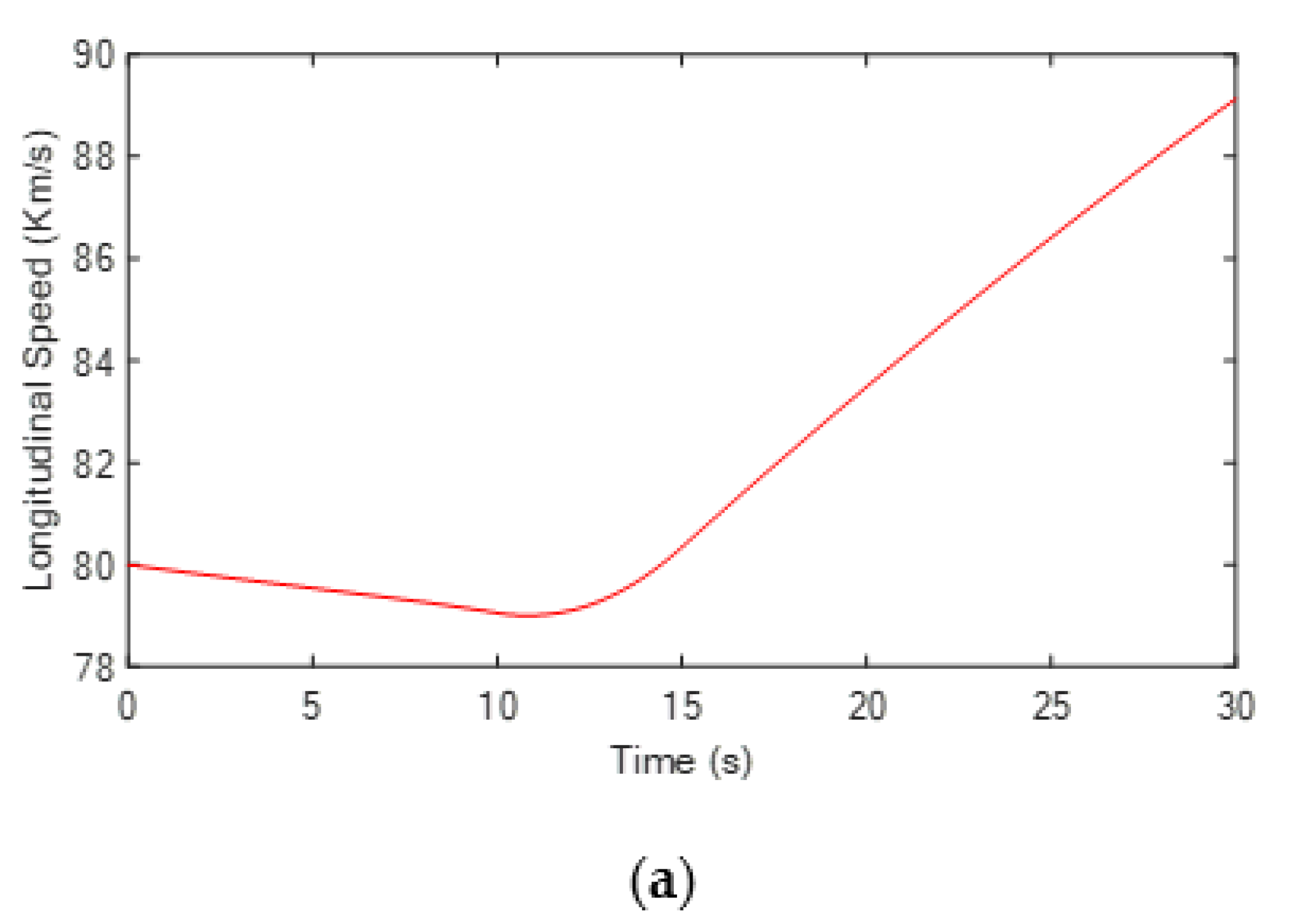
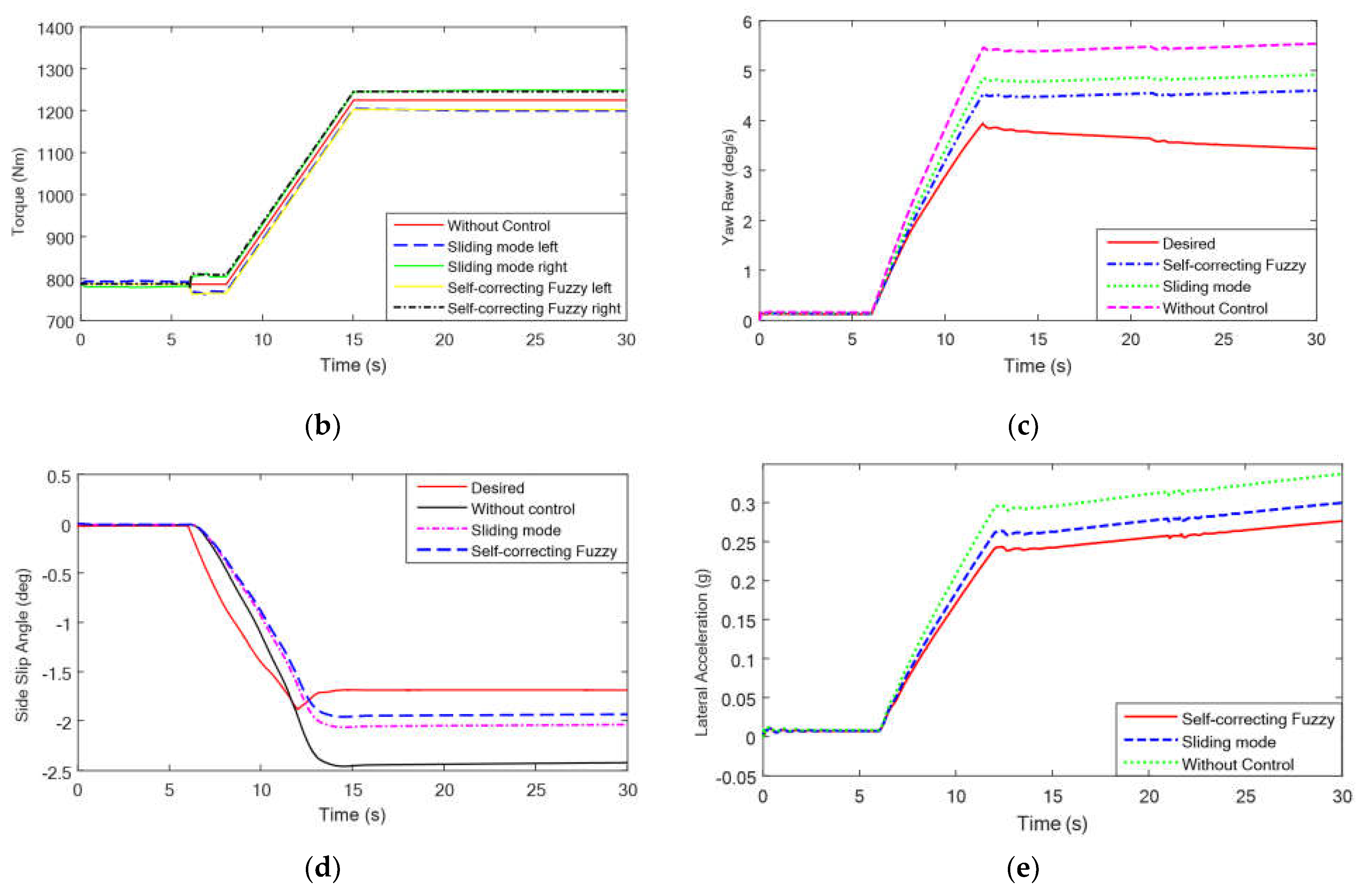
4.2. High-Speed Small-Steering-Angle Step Condition
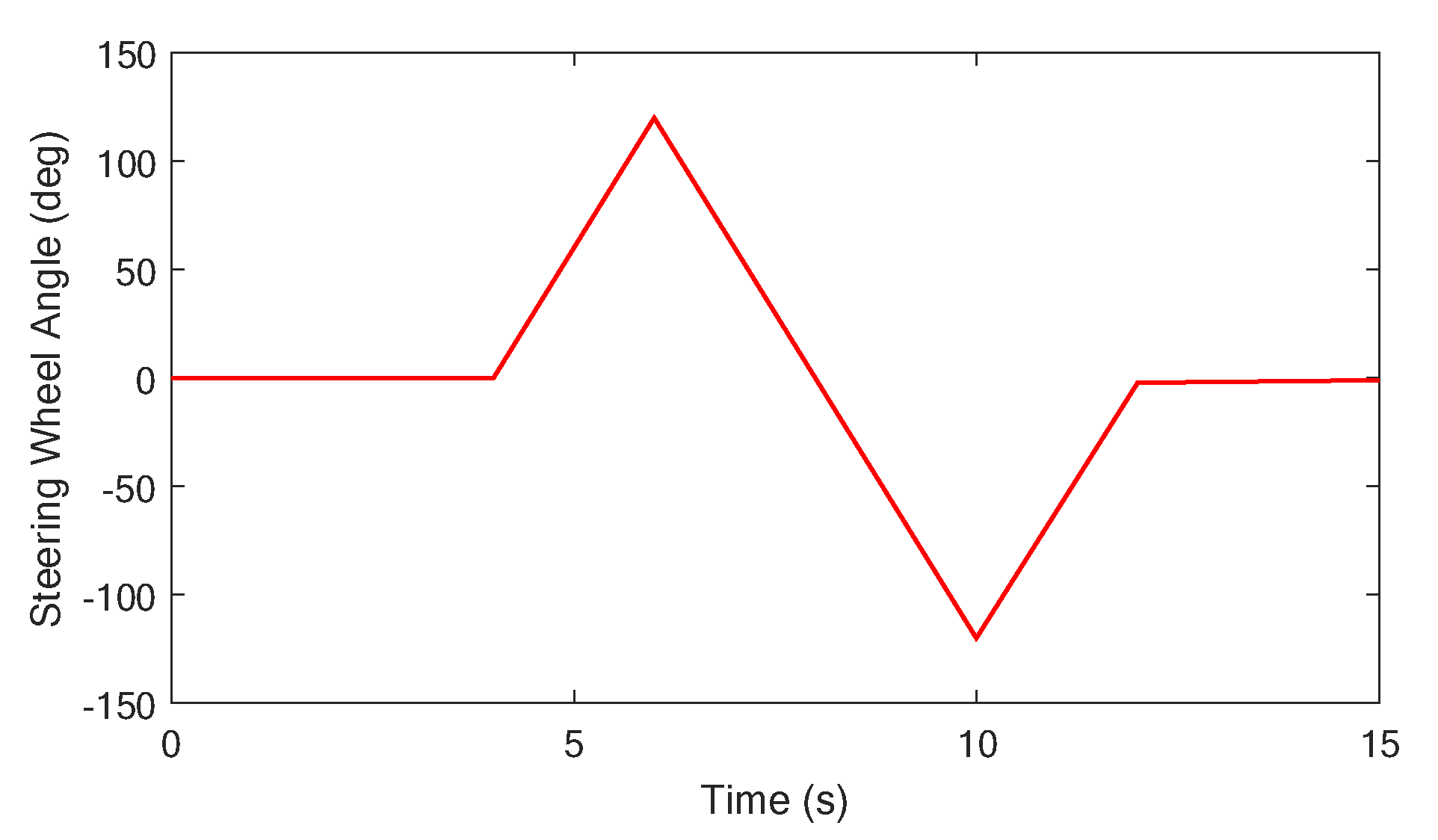
4.3. Sinusoidal Line Shift Condition
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| the distance from the center of mass of the vehicle to the front axles | the distance from the center of mass of the vehicle to the rear axles | ||
| wheelbase | the longitudinal speed | ||
| the cornering stiffness of the front axles of the vehicle | the cornering stiffness of the rear axles of the vehicle | ||
| the moment of inertia of the vehicle around the Z axis | the front wheel steering angle | ||
| stability factor | road adhesion coefficient | ||
| yaw rate | sideslip angle | ||
| the boundary value of the yaw rate | the boundary value of the sideslip angle | ||
| the expected value of the yaw rate | the expected value of the sideslip angle | ||
| the deviation between the actual value and the expected value of the yaw rate | the deviation between the actual value and the expected value of the sideslip angle | ||
| vehicle yaw | the wheel rolling radius | ||
| the longitudinal reaction forces of the front driving wheels | the longitudinal reaction forces of the rear driving wheels | ||
| the lateral reaction forces of the front driving wheels | the lateral reaction forces of the rear driving wheels | ||
| the rotational inertia of the wheel | the wheel friction | ||
| the wheel driving torque | the wheel braking torque | ||
| the driving torque of left rear wheels | the driving torque of the right rear wheels | ||
| vehicle mass | height of the center mass | ||
| wheel pitch | additional yaw moment | ||
| the sliding mode variable | the weight coefficient | ||
| the relative weight coefficient between the yaw rate deviation and the derivative | constant approaching rate | ||
| the boundary layer thickness parameter | pedal opening degree | ||
| the proportional factors | the scale factors of the output variable | ||
| the correction coefficients | the fuzzy set domain | ||
| membership functions | self-correcting variable | ||
| DYC | direct yaw moment control | NB | negative big |
| NM | negative medium | NS | negative small |
| ZE | zero | PS | positive small |
| PM | positive medium | PB | positive big |
| HIL | hardware-in-the-loop |
References
- Liu, G.; Qiao, L.Y. Coordinated Vehicle Lateral Stability Control Based on Direct Yaw Moment and Engine Torque Regulation under Complicated Road Conditions. Math. Probl. Eng. 2022, 2022, 4934723. [Google Scholar]
- Zhang, F.; Xiao, H.; Zhang, Y.; Gong, G. Distributed Drive Electric Bus Handling Stability Control Based on Lyapunov Theory and Sliding Mode Control. Actuators 2022, 11, 85. [Google Scholar] [CrossRef]
- Sawaqed, L.S.; Rabbaa, I.H. Fuzzy Yaw Rate and Sideslip Angle Direct Yaw Moment Control for Student Electric Racing Vehicle with Independent Motors. World Electr. Veh. J. 2022, 13, 109. [Google Scholar] [CrossRef]
- Tian, Y.; Yao, Q.Q.; Hang, P.; Wang, S.Y. Adaptive Coordinated Path Tracking Control Strategy for Autonomous Vehicles with Direct Yaw Moment Control. Chin. J. Mech. Eng. 2022, 35, 1. [Google Scholar] [CrossRef]
- Zhang, Z.; Ma, X.J.; Liu, C.G.; Wei, S.G. Dual-steering mode based on direct yaw moment control for multi-wheel hub motor driven vehicles: Theoretical design and experimental assessment. Def. Technol. 2020, 18, 49–61. [Google Scholar] [CrossRef]
- Li, H.; Wang, X.; Song, S.; Li, H. Vehicle control strategies analysis based on PID and fuzzy logic control. Procedia Eng. 2016, 137, 234–243. [Google Scholar] [CrossRef] [Green Version]
- Jonasson, M.; Andreasson, J.; Solyom, S.; Jacobson, B.; Stensson Trigell, A. Utilization of actuators to improve vehicle stability at the limit: From hydraulic brakes toward electric propulsion. J. Dyn. Syst. Meas. Control 2011, 133, 051003. [Google Scholar] [CrossRef]
- Nahidi, A.; Kasaiezadeh, A.; Khosravani, S.; Khajepour, A.; Chen, S.K.; Litkouhi, B. Modular integrated longitudinal and lateral vehicle stability control for electric vehicles. Mechatronics 2017, 44, 60–70. [Google Scholar] [CrossRef]
- Zhou, H.; Jia, F.; Jing, H.; Liu, Z.; Güvenç, L. Coordinated longitudinal and lateral motion control for four wheel independent motor-drive electric vehicle. IEEE Trans. Veh. Technol. 2018, 67, 3782–3790. [Google Scholar] [CrossRef]
- Ataei, M.; Khajepour, A.; Jeon, S. Model predictive control for integrated lateral stability, traction/braking control, and rollover prevention of electric vehicles. Veh. Syst. Dyn. 2020, 58, 49–73. [Google Scholar] [CrossRef]
- Xu, D.; Shi, Y.; Ji, Z. Model Free Adaptive Discrete-time Integral Sliding Mode Constrained Control for Autonomous 4WMV Parking Systems. IEEE Trans. Ind. Electron. 2018, 65, 834–843. [Google Scholar] [CrossRef]
- He, X.; Liu, Y.; Lv, C.; Ji, X.; Liu, Y. Emergency steering control of autonomous vehicle for collision avoidance and stabilisation. Veh. Syst. Dyn. 2019, 57, 1163–1187. [Google Scholar] [CrossRef]
- Zhang, Y.X.; Liu, X.D.; He, Y.L.; Zhang, K. Direct Yaw Moment Control for Four-in-Wheel-Motor-Driven Electric Vehicle. Front. Artif. Intell. Appl. 2019, 314, 31–40. [Google Scholar]
- Zhang, C.; Hu, J.; Qiu, J.; Yang, W.; Sun, H.; Chen, Q. A novel fuzzy observer-based steering control approach for path tracking in autonomous vehicles. IEEE Trans. Fuzzy Syst. 2019, 27, 78–90. [Google Scholar] [CrossRef]
- Lekshmi, S.; PS, L.P. Mathematical modeling of Electric vehicles-A survey. Control. Eng. Pract. 2019, 92, 104138. [Google Scholar]
- Qi, G.; Fan, X.; Zhao, Z. Fuzzy and Sliding Mode Variable Structure Control of Vehicle Active Steering System. Recent Pat. Mech. Eng. 2021, 14, 226–241. [Google Scholar] [CrossRef]
- Liu, D.; Huang, S.; Wu, S.; Fu, X. Direct Yaw-Moment Control of Electric Vehicle With in-Wheel Motor Drive System. Int. J. Automot. Technol. 2020, 21, 1013–1028. [Google Scholar] [CrossRef]
- Feng, T.; Wang, Y.P.; Li, Q. Coordinated control of active front steering and active disturbance rejection sliding mode-based DYC for 4WID-EV. Meas. Control. 2020, 53, 1870–1882. [Google Scholar] [CrossRef]
- Lin, F.J.; Chou, W.D. An induction motor servo drive using sliding-mode controller with genetic algorithm. Electr. Power Syst. Res. 2003, 64, 93–108. [Google Scholar] [CrossRef]
- Fu, C.Y.; Reza, H.; Alireza, B.; Reza, N.J. Direct yaw moment control for electric and hybrid vehicles with independent motors. Int. J. Veh. Des. 2015, 69, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Lin, F.J.; Wai, R.J. Sliding-mode-controlled slider-crank mechanism with fuzzy neural network. IEEE Trans. Ind. Electron. 2001, 48, 60–70. [Google Scholar]
- Park, C.W.; Cho, Y.W. TS model based indirect adaptive fuzzy control using online parameter estimation. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2004, 34, 2293–2302. [Google Scholar] [CrossRef]
- Zarei, H.; Khastan, A.; Rodríguez-López, R. Suboptimal control of linear fuzzy systems. Fuzzy Sets Syst. 2022; in press. [Google Scholar] [CrossRef]
- Baz, R.; Majdoub, K.E.; Giri, F.; Taouni, A. Self-tuning fuzzy PID speed controller for quarter electric vehicle driven by In-wheel BLDC motor and Pacejka’s tire model. IFAC Pap. 2022, 55, 598–603. [Google Scholar] [CrossRef]
- Yun, J.; Sun, Y.; Li, C.; Jiang, D.; Tao, B.; Li, G.; Liu, Y.; Chen, B.; Tong, X.; Xu, M. Self-adjusting force/bit blending control based on quantitative factor-scale factor fuzzy-PID bit control. Alex. Eng. J. 2022, 61, 4389–4397. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Name of the Parameter | The Reference Value | Unit |
|---|---|---|
| Vehicle mass () | 12,800 | Kg |
| Length × Width × Height | 12,000 × 2500 × 3150 | mm |
| Height of the center mass () | 1200 | mm |
| The center of mass to the front axle distance () | 3240 | mm |
| The center of mass to the rear axle distance () | 1260 | mm |
| Wheelbase () | 4500 | mm |
| The front tire cornering stiffness () | 119,283.4 | N/rad |
| The rear tire cornering stiffness () | 225,781.4 | N/rad |
| Wheel pitch () | 1863 | mm |
| NB | NB | NB | NB |
| NS | NS | NS | NM |
| ZE | ZE | ZE | NS |
| PS | PS | PS | ZE |
| PB | PB | PB | PS |
| PM | |||
| PB |
| NB | NS | ZE | PS | PB | |
|---|---|---|---|---|---|
| NB | NB | NS | PS | NS | NB |
| NS | NB | PS | ZE | PS | NB |
| ZE | NB | ZE | ZE | ZE | NB |
| PS | NB | PS | ZE | PS | NB |
| PB | NB | NS | PS | NS | NB |
| NB | NS | ZE | PS | PB | |
|---|---|---|---|---|---|
| NB | NB | NB | NB | NM | NM |
| NS | NB | NM | NM | NS | NS |
| ZE | NS | NS | ZE | PS | PS |
| PS | PS | PS | PM | PM | PB |
| PB | PM | PM | PB | PB | PB |
| Control Strategy | Without Control | Sliding Mode | Deviation (%) | Self-Correcting Fuzzy | Deviation (%) |
|---|---|---|---|---|---|
| Maximum yaw rate (deg/s) | 14.72 | 12.21 | 22 | 13.02 | 30 |
| Maximum sideslip angle (deg) | 4.11 | 2.59 | 28 | 2.20 | 9 |
| Maximum lateral acceleration (g) | 0.283 | 0.224 | / | 0.219 | / |
| Control Strategy | Without Control | Sliding Mode | Deviation (%) | Self-Correcting Fuzzy | Deviation (%) |
|---|---|---|---|---|---|
| Maximum yaw rate (deg/s) | 5.53 | 4.96 | 30 | 4.53 | 19 |
| Maximum sideslip angle (deg) | 2.42 | 2.05 | 21 | 1.95 | 15 |
| Maximum lateral acceleration (g) | 0.34 | 0.3 | / | 0.275 | / |
| Control Strategy | Without Control | Sliding Mode | Deviation (%) | Self-Correcting Fuzzy | Deviation (%) |
| Maximum yaw rate (deg/s) | wandering | 8 | 20 | 11 | 10 |
| Maximum sideslip angle (deg) | wandering | 2 | 11 | 2.22 | 1.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, W.; Chen, H.; Zhu, S.; Chen, S.; Gao, J.; Wang, W.; Zhou, R. Design of a Wheel-Side Rear-Drive Distributed Electric Bus Control Strategy Based on Self-Correcting Fuzzy Control. Electronics 2022, 11, 4219. https://doi.org/10.3390/electronics11244219
Luo W, Chen H, Zhu S, Chen S, Gao J, Wang W, Zhou R. Design of a Wheel-Side Rear-Drive Distributed Electric Bus Control Strategy Based on Self-Correcting Fuzzy Control. Electronics. 2022; 11(24):4219. https://doi.org/10.3390/electronics11244219
Chicago/Turabian StyleLuo, Wenhua, Huipeng Chen, Shaopeng Zhu, Sen Chen, Jian Gao, Weiyang Wang, and Rougang Zhou. 2022. "Design of a Wheel-Side Rear-Drive Distributed Electric Bus Control Strategy Based on Self-Correcting Fuzzy Control" Electronics 11, no. 24: 4219. https://doi.org/10.3390/electronics11244219