
Robust Phase Bias Estimation Method for Azimuth Multi-Channel HRWS SAR System Based on Maximum Modified Kurtosis

Abstract
:1. Introduction
2. Signal Model of the Multichannel SAR and Modified Kurtosis
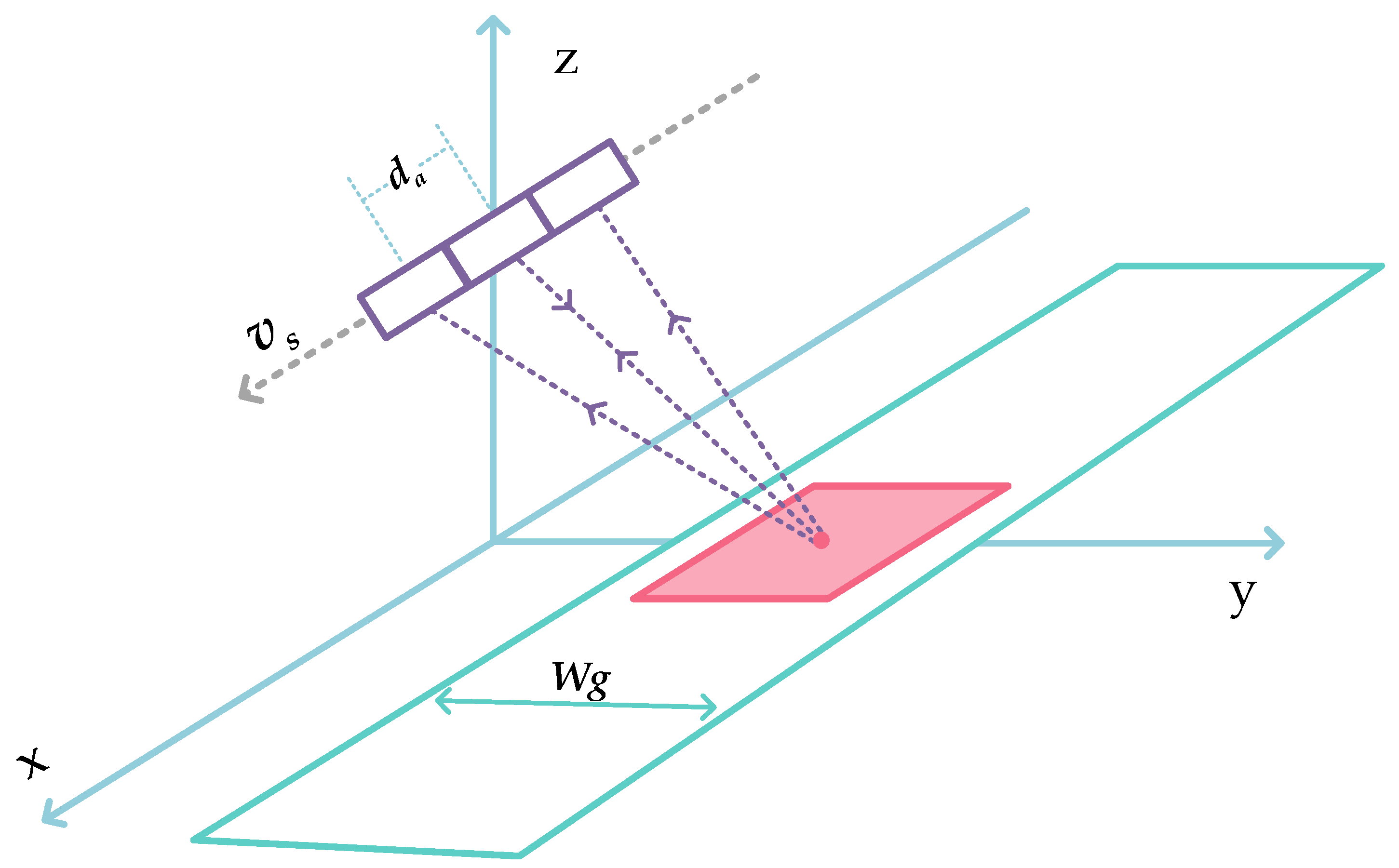
2.1. Signal Model of the Multichannel SAR
2.2. Modified Kurtosis
3. Channel Phase Bias Estimation Based on MMK
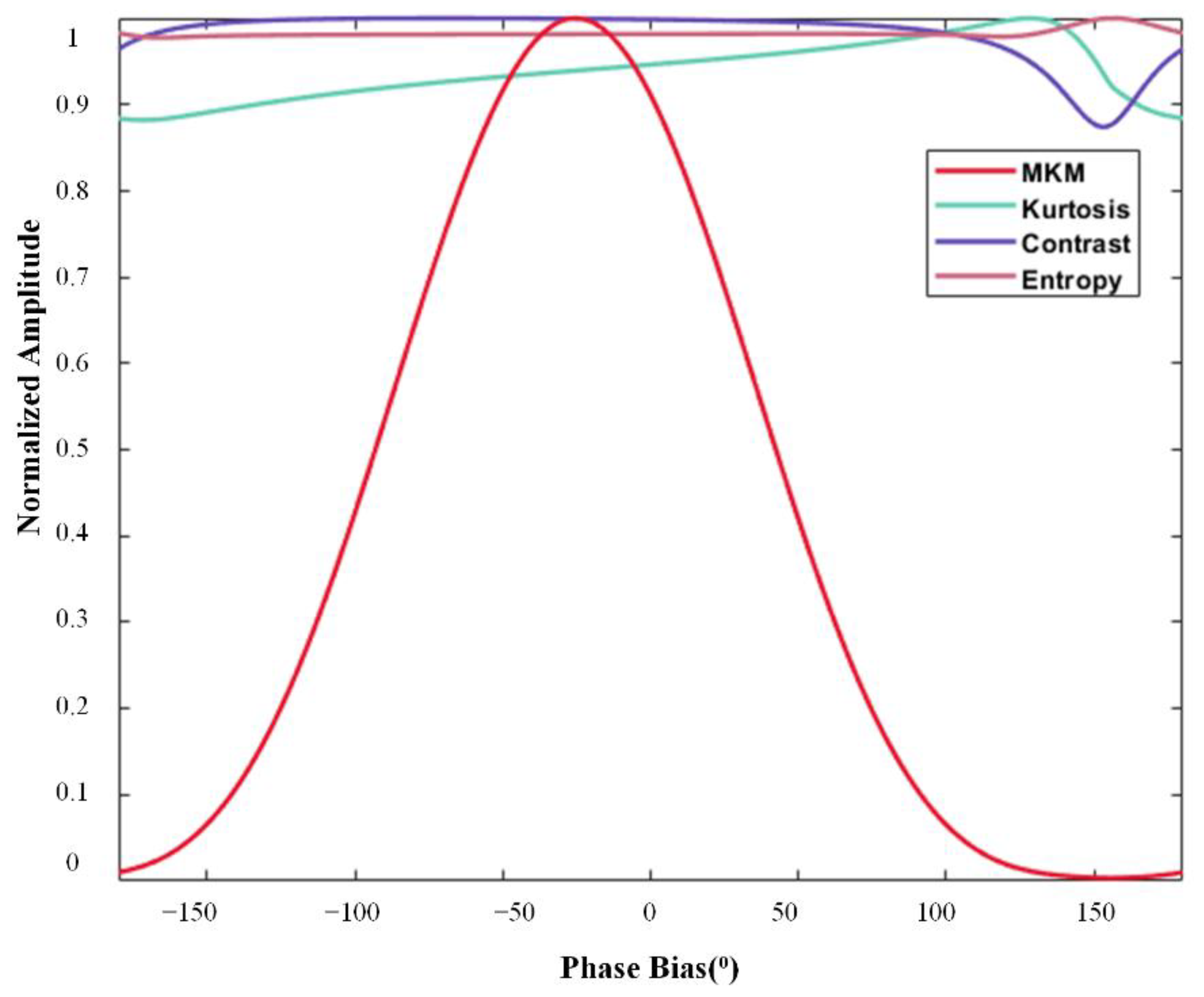
3.1. Construction of the Objective Optimization Function
3.2. Estimation of Phase Bias
4. Simulations and Real Data Processing
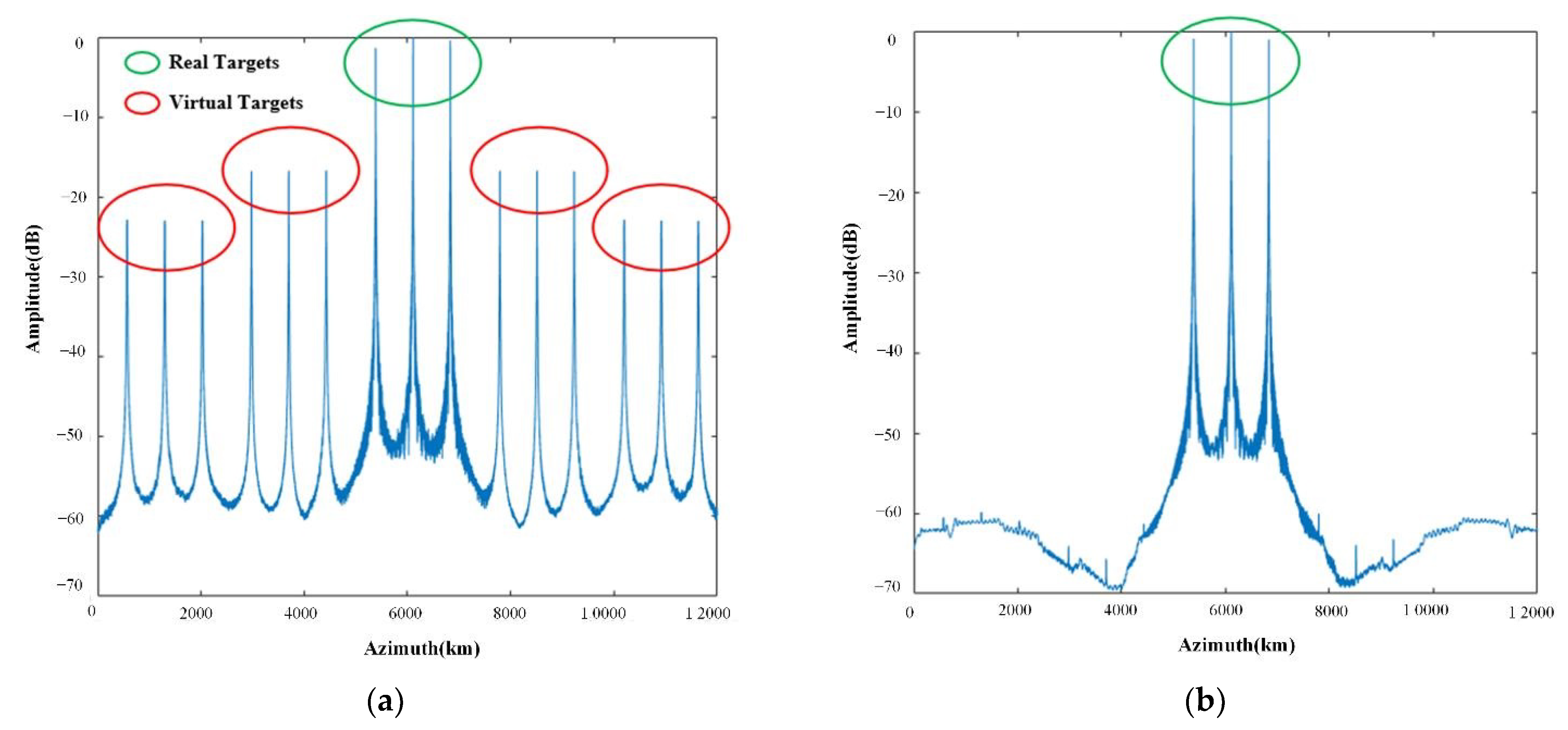
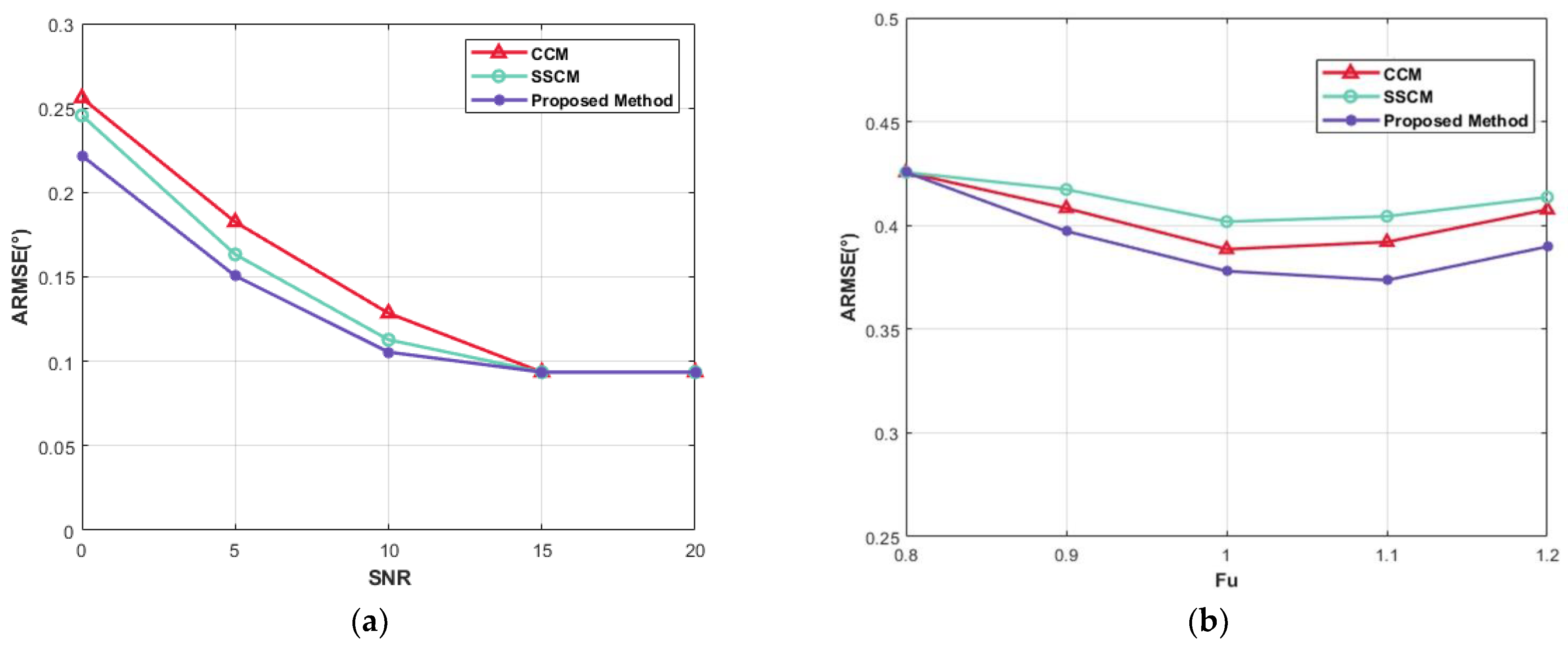
4.1. Simulated Results
4.2. Real Data Processing
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Freeman, A.; Johnson, W.T.K.; Huneycutt, B.; Jordan, R.; Hensley, S.; Siqueira, P. The “Myth” of the minimum SAR antenna area constraint. IEEE Trans. Geosci. Remote Sens. 2000, 38, 320–324. [Google Scholar] [CrossRef] [Green Version]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A Satellite Formation for High-Resolution SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Shen, Q.; Wang, L.; Wang, Q.; Guo, Z.; Zhao, J. Optimal Time Selection for ISAR Imaging of Ship Targets Based on Time-Frequency Analysis of Multiple Scatterers. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Wang, R.; Loffeld, O.; Neo, Y.; Nies, H.; Walterscheid, I.; Espeter, T.; Klare, J.; Ender, J. Focusing Bistatic SAR Data in Airborne/Stationary Configuration. IEEE Trans. Geosci. Remote Sens. 2010, 48, 452–465. [Google Scholar] [CrossRef]
- Krieger, G.; Gebert, N.; Moreira, A. Unambiguous SAR signal reconstruction from nonuniform displaced phase center sampling. IEEE Geosci. Remote Sens. Lett. 2004, 1, 260–264. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Wang, H.; Su, T.; Bao, Z. Generation of wide-swath and high-resolution SAR images from multichannel small spaceborne SAR systems. IEEE Geosci. Remote Sens. Lett. 2005, 2, 82–86. [Google Scholar] [CrossRef]
- Gebert, N.; Krieger, G.; Moreira, A. Digital Beamforming on Receive: Techniques and Optimization Strategies for High-Resolution Wide-Swath SAR Imaging. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 564–592. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Xing, M.; Xia, X.; Liu, Y.; Guo, R.; Bao, Z. A Robust Channel-Calibration Algorithm for Multi-Channel in Azimuth HRWS SAR Imaging Based on Local Maximum-Likelihood Weighted Minimum Entropy. IEEE Trans. Image Process. 2013, 22, 5294–5305. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Younis, M.; Prats-Iraola, P.; Gabele, M.; Krieger, G. First Spaceborne Demonstration of Digital Beamforming for Azimuth Ambiguity Suppression. IEEE Trans. Geosci. Remote Sens. 2013, 51, 579–590. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Xing, M.; Xia, X.; Zhang, L.; Guo, R.; Lian, Y.; Bao, Z. Multichannel HRWS SAR Imaging Based on Range-Variant Channel Calibration and Multi-Doppler-Direction Restriction Ambiguity Suppression. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4306–4327. [Google Scholar] [CrossRef]
- Zhang, S.; Xing, M. A Novel Doppler Chirp Rate and Baseline Estimation Approach in the Time Domain Based on Weighted Local Maximum-Likelihood for an MC-HRWS SAR System. IEEE Geosci. Remote Sens. Lett. 2017, 14, 299–303. [Google Scholar] [CrossRef]
- Feng, J.; Gao, C.; Zhang, Y.; Wang, R. Phase Mismatch Calibration of the Multichannel SAR Based on Azimuth Cross Correlation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 903–907. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Z.; Wang, Z.; Bao, Z. On the Baseband Doppler Centroid Estimation for Multichannel HRWS SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2014, 12, 2050–2054. [Google Scholar]
- Zhang, L.; Xing, M.; Qiu, C.; Bao, Z. Adaptive two-step calibration for high-resolution and wide-swath SAR imaging. IET Radar Sonar Navig. 2010, 4, 548–559. [Google Scholar] [CrossRef]
- Yang, T.; Li, Z.; Liu, Y.; Bao, Z. Channel Error Estimation Methods for Multichannel SAR Systems in Azimuth. IEEE Geosci. Remote Sens. Lett. 2013, 10, 548–552. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, K.; Wang, L.; Guo, Z.; Li, N. A novel phase bias estimation method for multichannel HRWS SAR system in azimuth based on RDS analysis. Remote Sens. Lett. 2020, 12, 42–50. [Google Scholar] [CrossRef]
- Sun, G.; Xiang, J.; Xing, M.; Yang, J.; Guo, L. A channel phase error correction method based on joint quality function of GF-3 SAR dual-channel images. Sensors 2018, 18, 3131. [Google Scholar] [CrossRef] [Green Version]
- Cai, Y.; Deng, Y.; Zhang, H.; Wang, R.; Wu, Y.; Cheng, S. An Image-Domain Least L 1-Norm Method for Channel Error Effect Analysis and Calibration of Azimuth Multi-Channel SAR. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, Z. New Range Alignment Algorithm for ISAR Based on Maximum Modified Kurtosis. J. Nanjing Univ. Aeronaut. Astronaut. 2006, 38, 722–726. [Google Scholar]
- Given, J.A.; Schmidt, W.R. Generalized ISAR—part I: An optimal method for imaging large naval vessels. IEEE Trans. Image Process. 2005, 14, 1783–1791. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Carrier frequency | 9.65 GHz |
| Platform velocity PRF Channel number Inter-aperture spacing Pulse Bandwidth Sampling frequency | 7474.8 m/s 1800 Hz 3 3.3333 m 200 MHz 240 MHz |
| Phase Bias | Channel 1 | Channel 2 | Channel 3 |
|---|---|---|---|
| Actual value | −25° | 0° | 25° |
| Estimated value Accuracy | −24.869° 0.131° | 0° 0° | 25.153° 0.153° |
| Parameters | Value |
|---|---|
| Carrier frequency Platform velocity PRF Channel number Inter-aperture spacing Doppler bandwidth | 5.4 GHz 125 m/s 180 Hz 3 0.5 m 400 Hz |
| MVTP (dB) | a | b | c | d |
|---|---|---|---|---|
| Without phase bias calibration | −25.12 | −17.59 | −16.27 | −21.61 |
| CCM | −38.65 | −32.12 | −33.72 | −36.06 |
| MMK method | −49.89 | −43.56 | −44.17 | −47.78 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, X.; Zhang, H.; Shu, G. Robust Phase Bias Estimation Method for Azimuth Multi-Channel HRWS SAR System Based on Maximum Modified Kurtosis. Electronics 2022, 11, 3821. https://doi.org/10.3390/electronics11223821
Pan X, Zhang H, Shu G. Robust Phase Bias Estimation Method for Azimuth Multi-Channel HRWS SAR System Based on Maximum Modified Kurtosis. Electronics. 2022; 11(22):3821. https://doi.org/10.3390/electronics11223821
Chicago/Turabian StylePan, Xingbo, Hanqing Zhang, and Gaofeng Shu. 2022. "Robust Phase Bias Estimation Method for Azimuth Multi-Channel HRWS SAR System Based on Maximum Modified Kurtosis" Electronics 11, no. 22: 3821. https://doi.org/10.3390/electronics11223821