
Stability Analysis of Power Hardware-in-the-Loop Simulations for Grid Applications

Abstract
:1. Introduction
- A general analysis of PHiL stability based on the transfer function of a simplified circuit. The influence of impedance ratio, time delay, amplifier characteristics and low-pass filtering has been considered.
- An offline model of an exemplary PHiL simulation case was implemented in MATLAB Simulink™. Applying the findings of the theoretical analysis, the limits of stable PHiL simulation have been systematically investigated. Both, interfacing with a switching and a linear amplifier has been analyzed with a modeling approach.
- The modeling approach is validated with a real PHiL laboratory setup with both a linear and a switching amplifier in comparison.
- The results are applied to the example of a PV system with a residential load at the low-voltage grid to ensure stability in a real PHiL application.
2. Power Hardware-in-the-Loop Simulation of Electrical Energy Systems
2.1. Real Time Simulation
- The fixed simulation time step has to be small enough to resolve even transients with sufficient accuracy;
- All calculations for a simulation time step, as well as the signal input and output, must be completed within the time period corresponding to the real time.
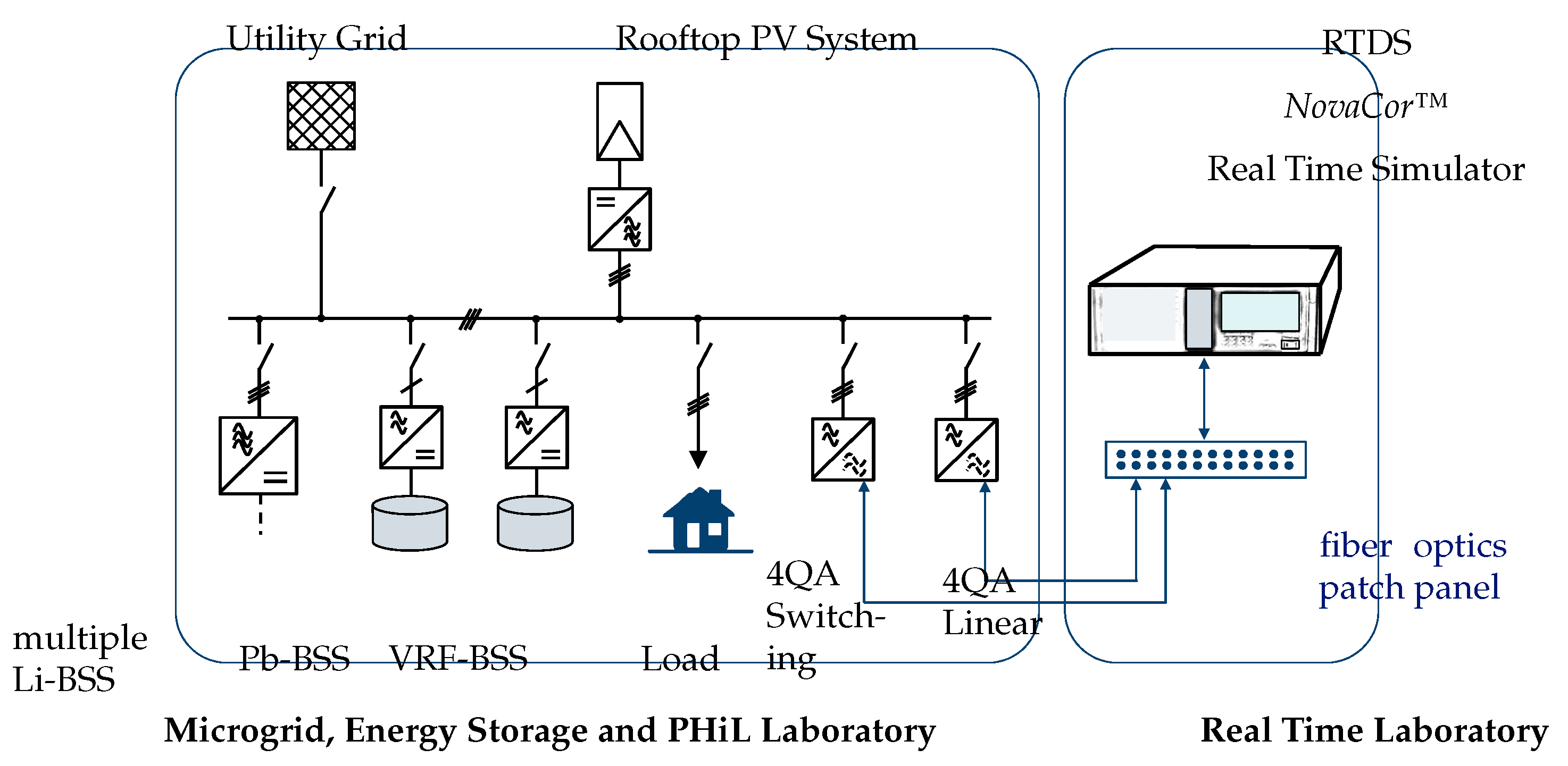
2.2. RTS-PHiL Laboratories
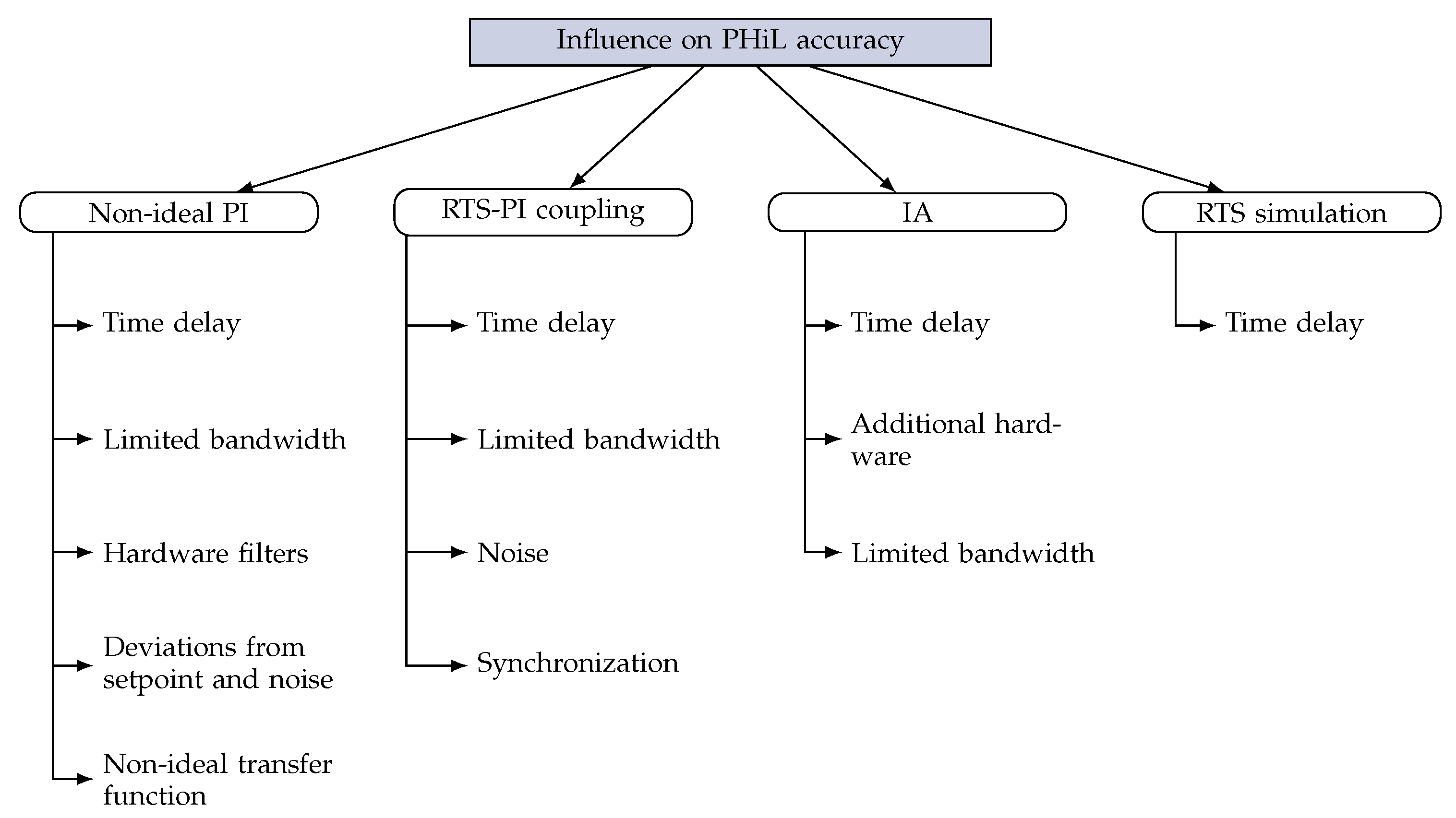
2.3. PHiL Simulation Fidelity and Errors
2.4. PHiL Power Interface
2.5. Communication between RTS and PI
2.6. Interfacing Algorithms
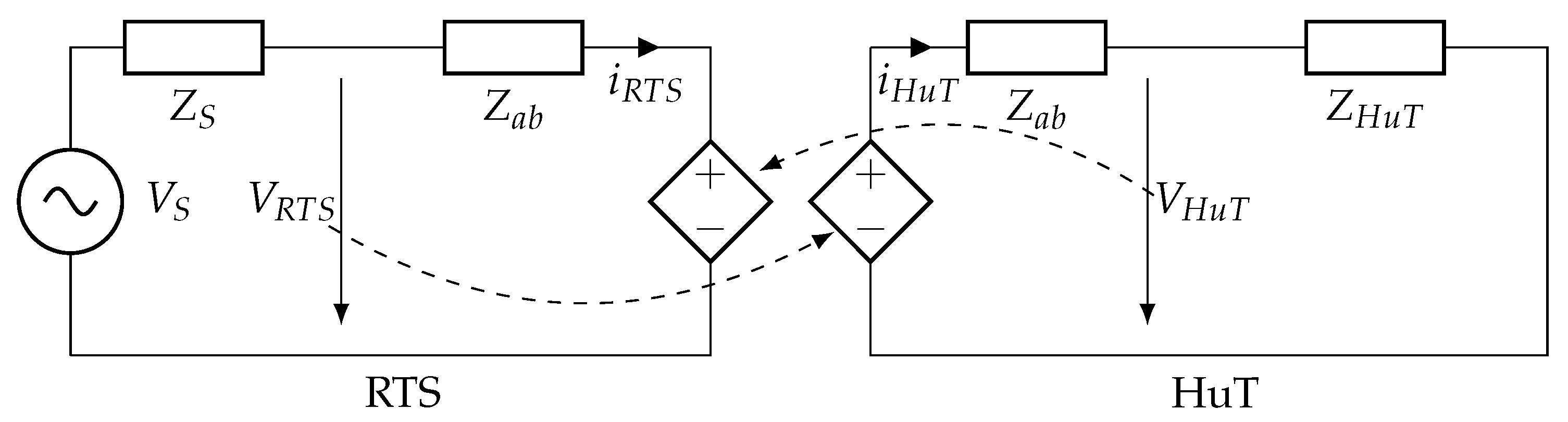
2.6.1. Ideal Transformer Model (ITM)
2.6.2. Partial Circuit Duplication (PCD)
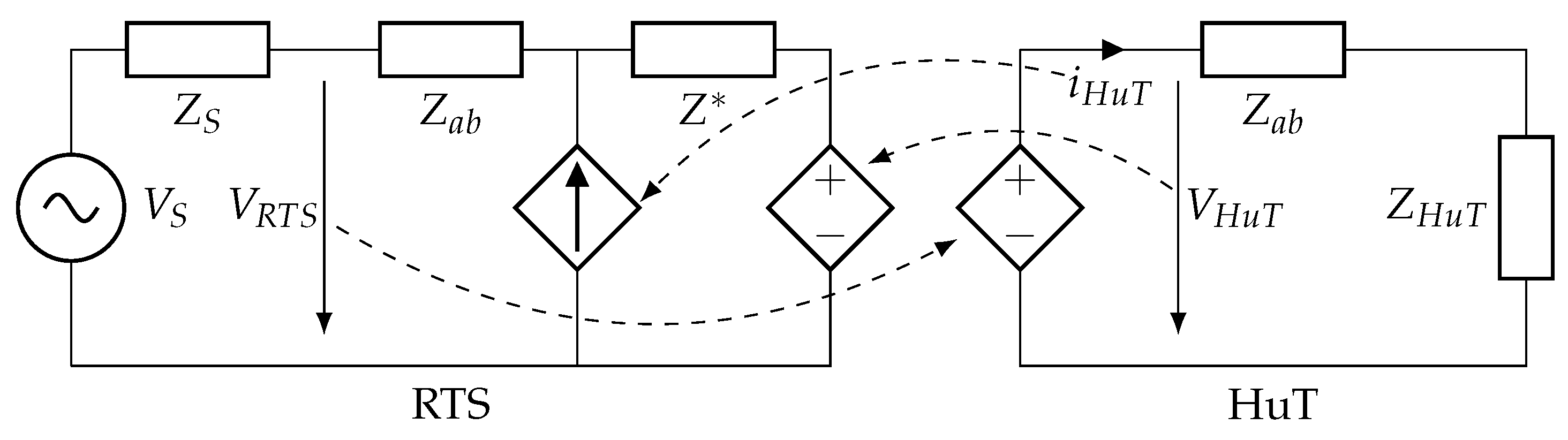
2.6.3. Damping Impedance Model (DIM)
2.6.4. Transmission Line Model (TLM)
2.6.5. Hardware Inductance Addition Method (HIA)
2.6.6. Feedback Signal Filtering (FSF)
2.6.7. Further Interfacing Algorithms
3. Analytic Approach to PHiL Stability
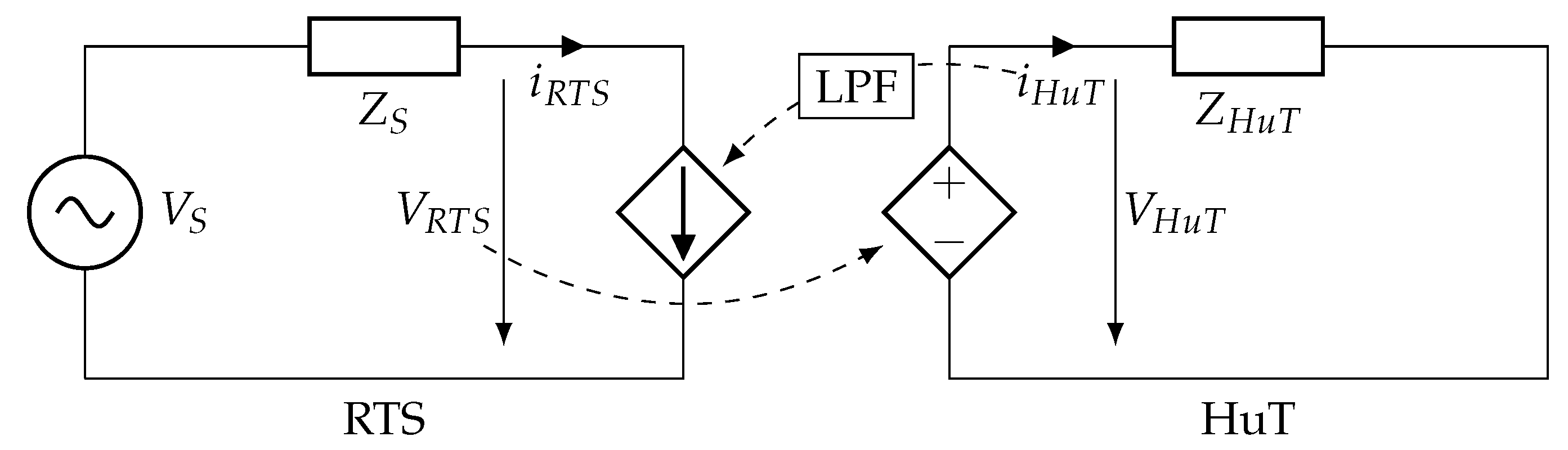
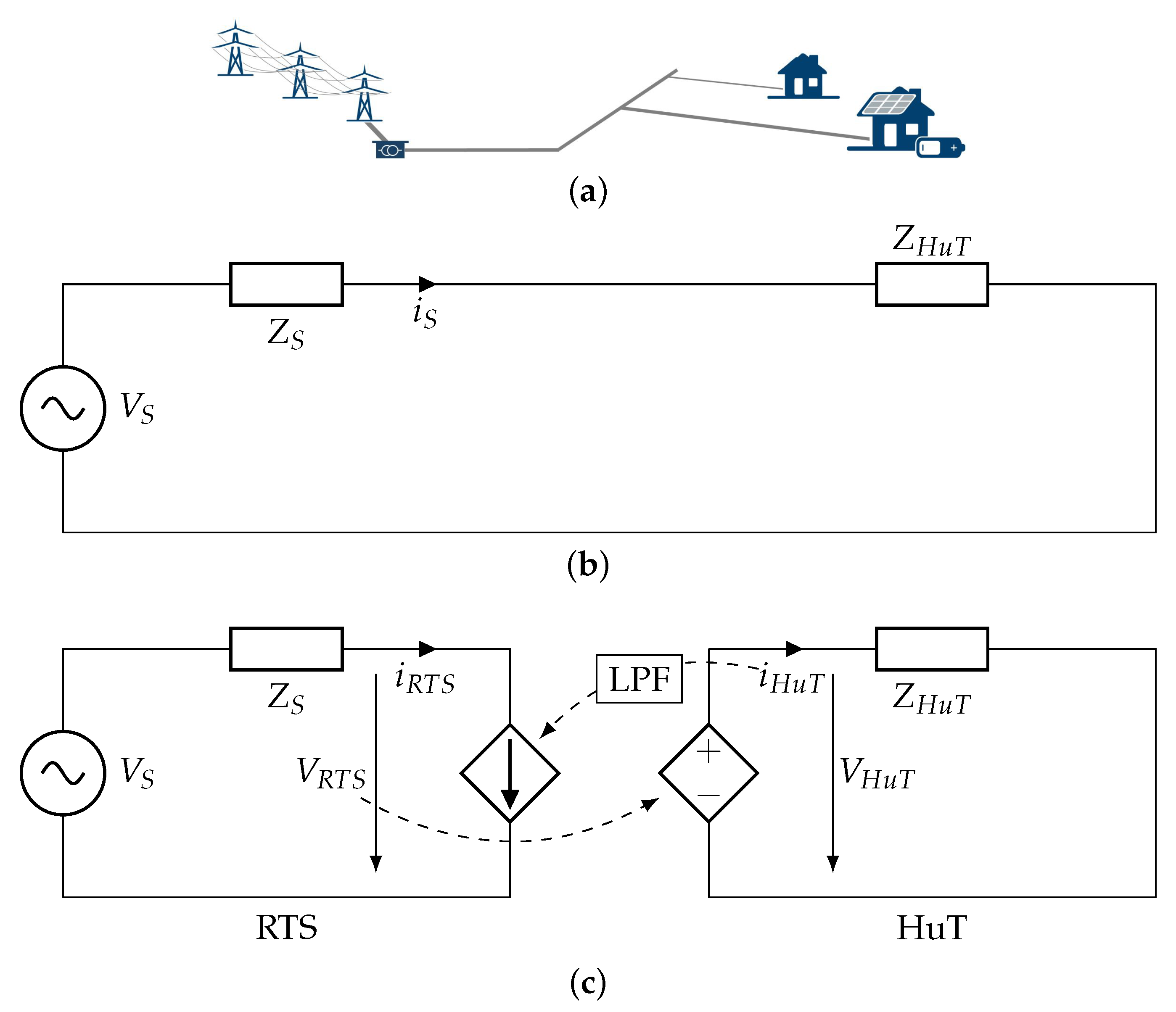
3.1. Minimal PHiL Example Circuit
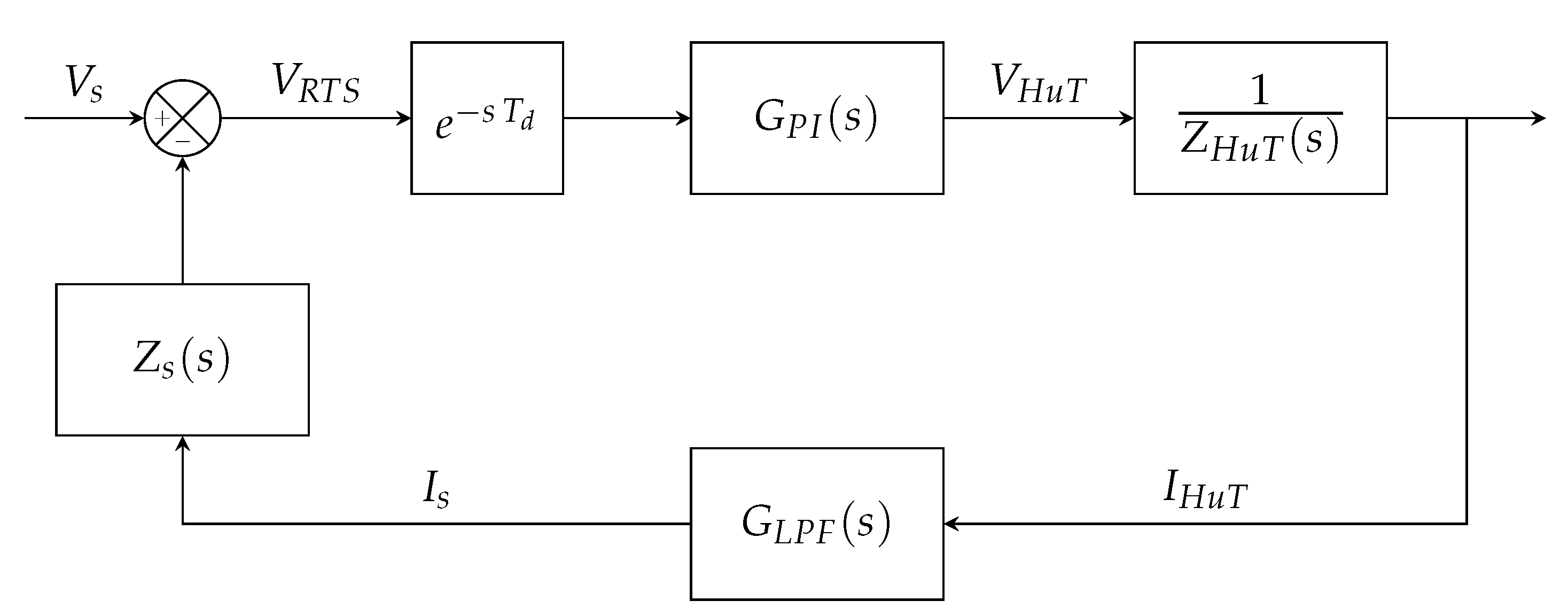
3.2. Analytic Stability Analysis
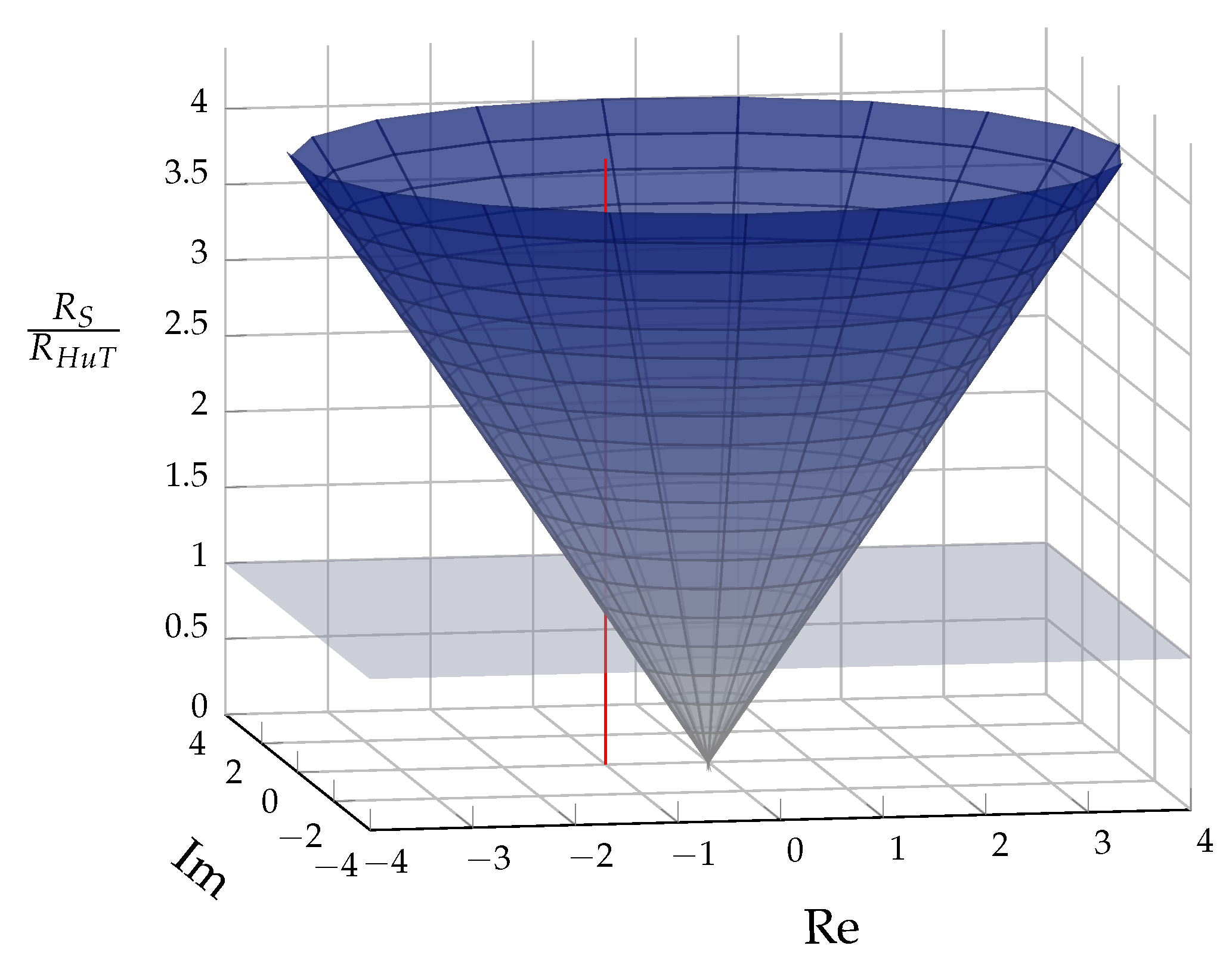
3.2.1. Resistive Impedance
3.2.2. Complex Impedance
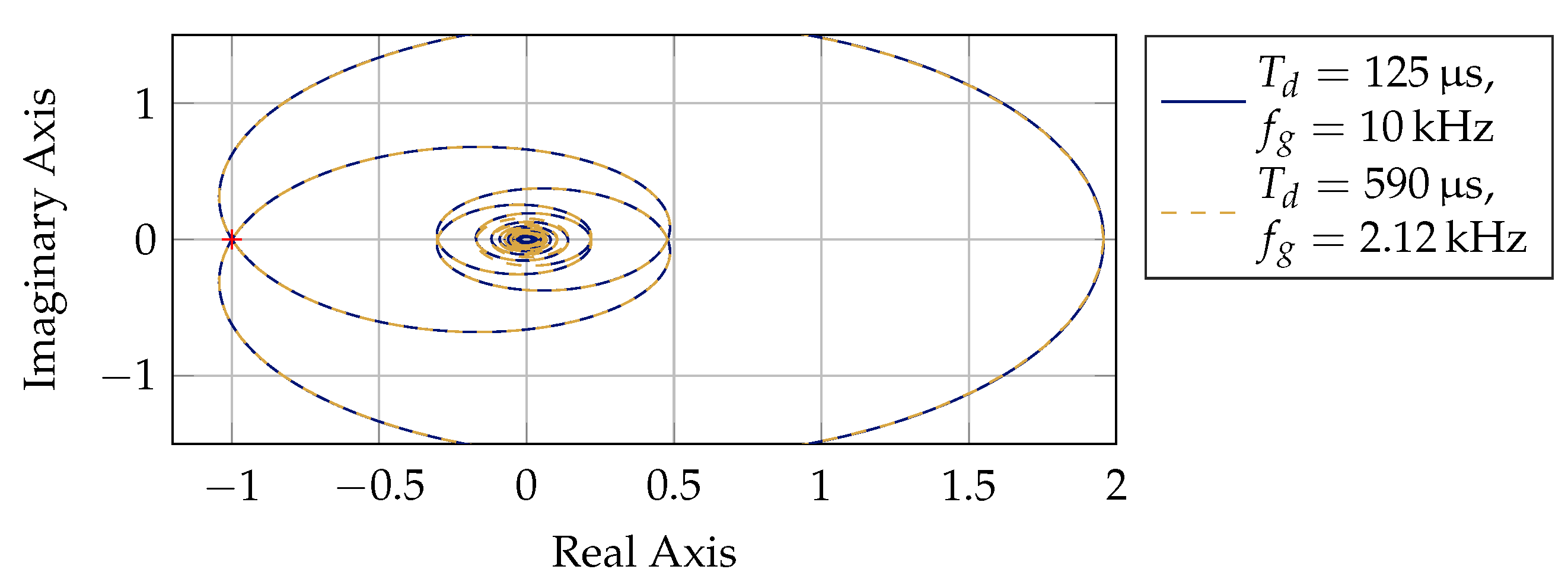
3.2.3. Influence of Time Delay
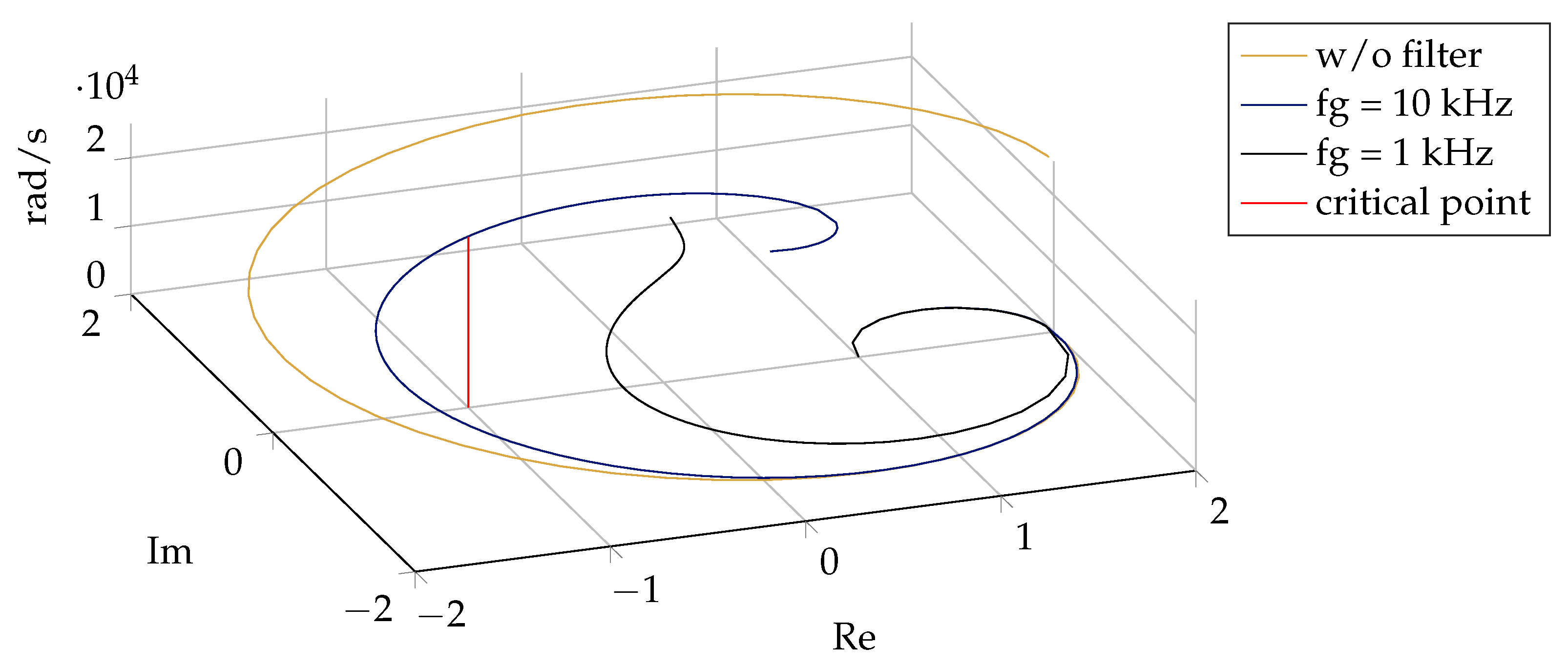
3.2.4. Stability Improvement with Feedback Signal Filtering
3.2.5. Influence of the Power Amplifier
4. Simulative and Experimental Stability Validation
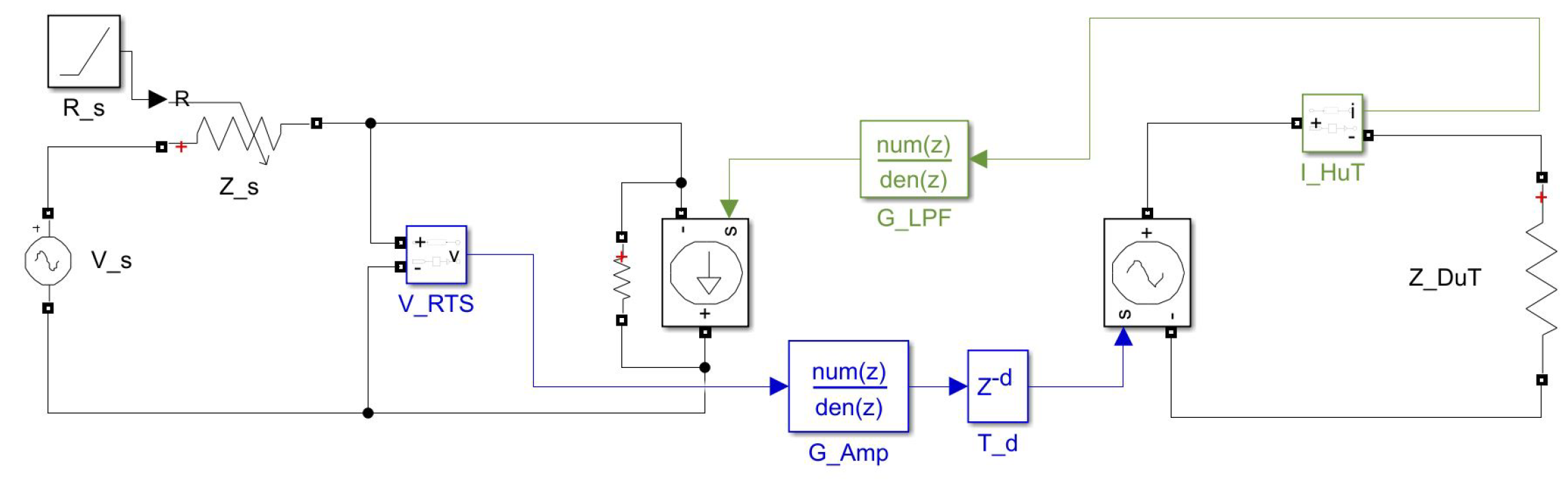
4.1. PHiL Circuit Offline Model
4.2. Experimental PHiL Stability Analysis
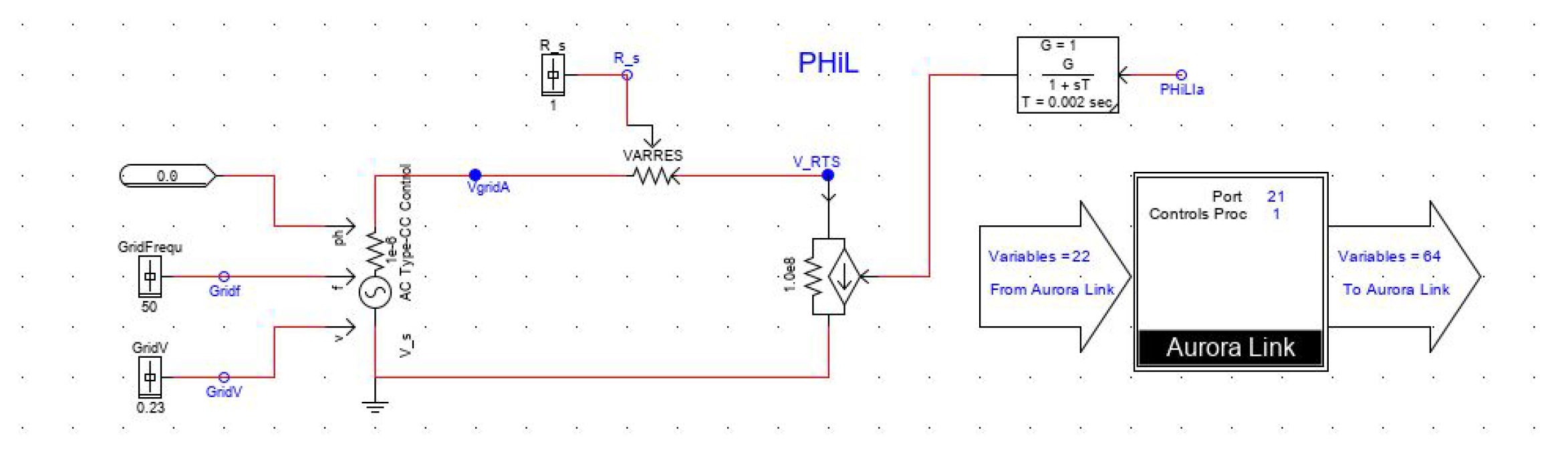
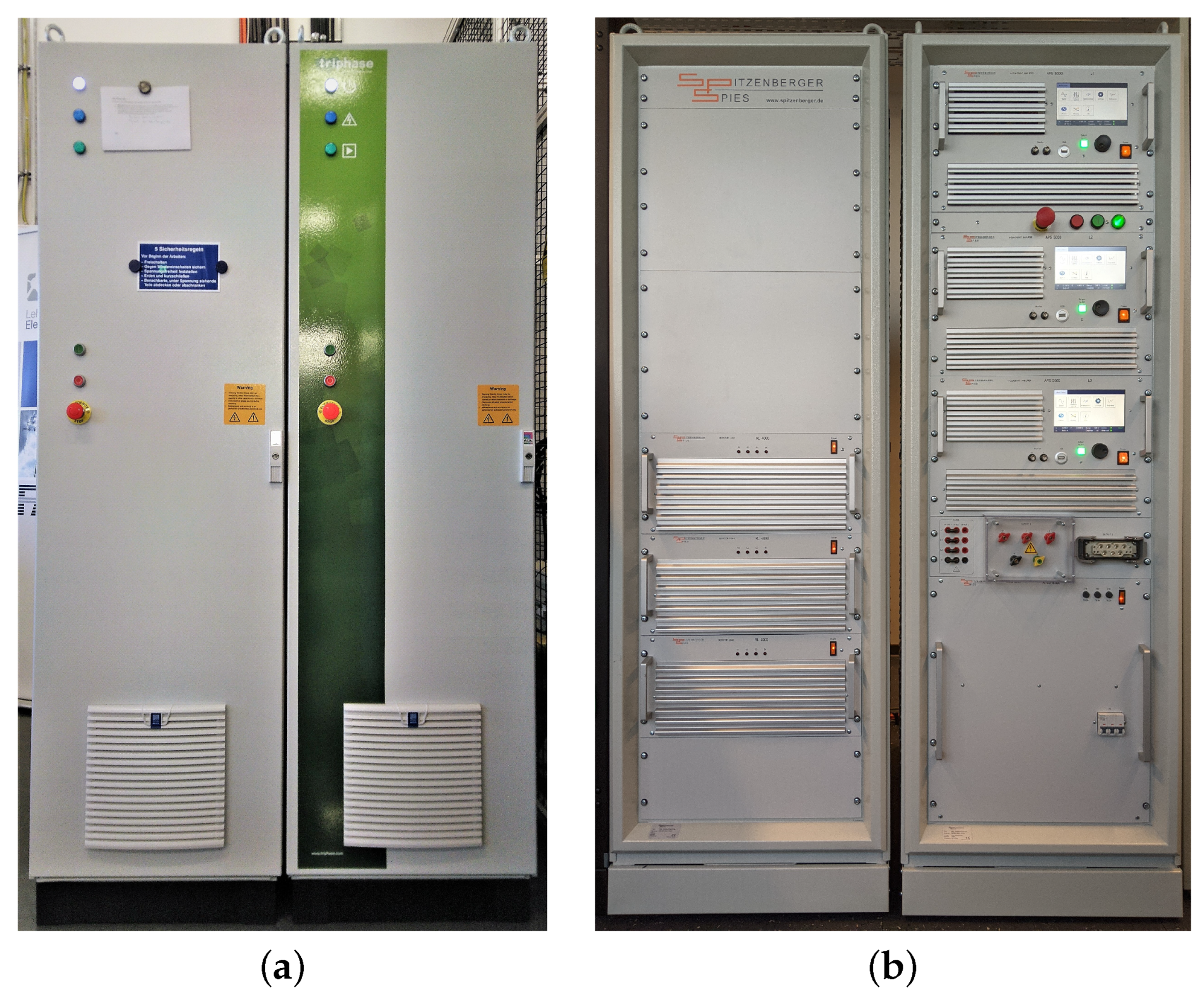
4.2.1. Experimental Setup with Switching Amplifier
4.2.2. Experimental Setup with Linear Amplifier
4.3. Comparison
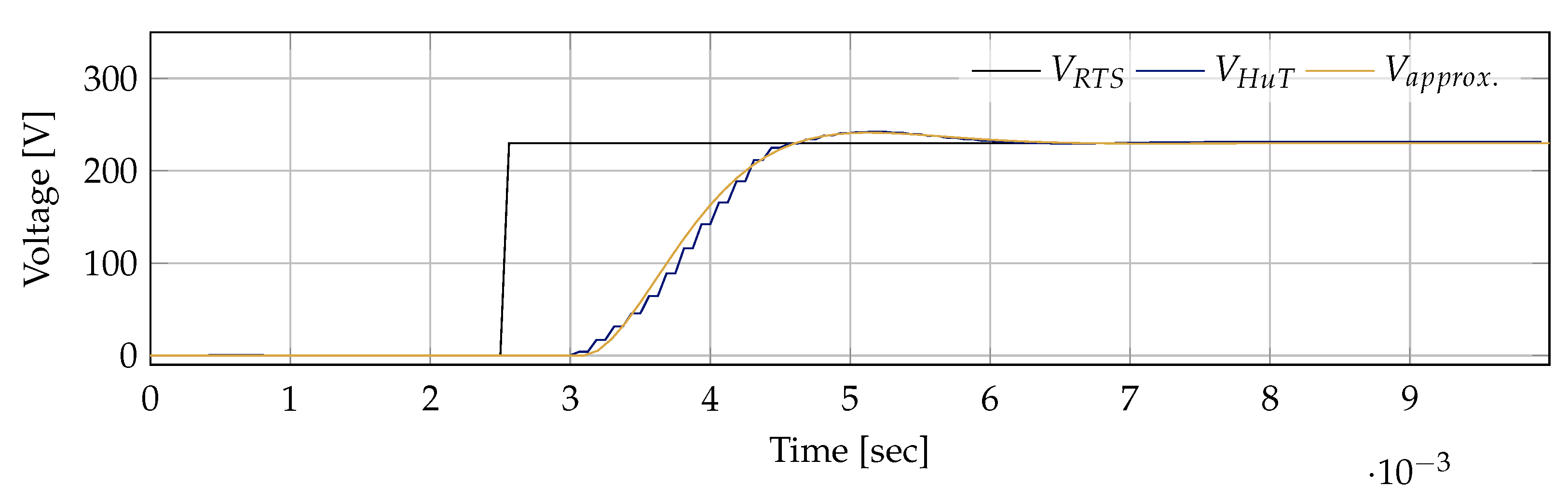
4.3.1. Ideal Power Interface
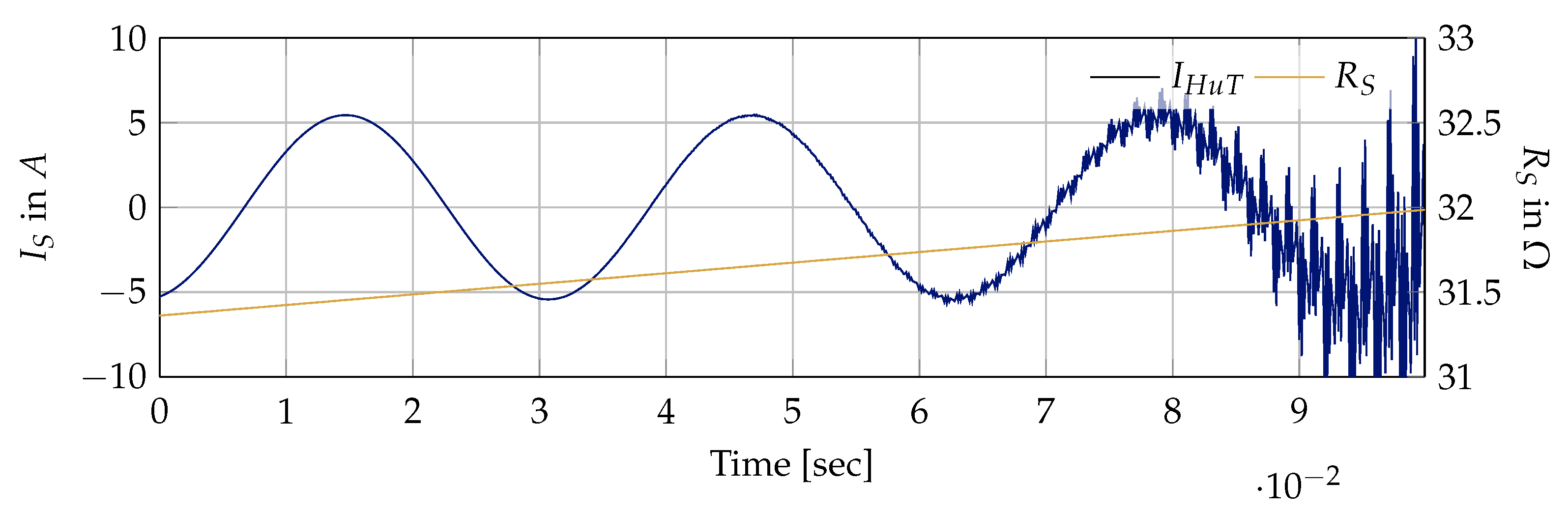
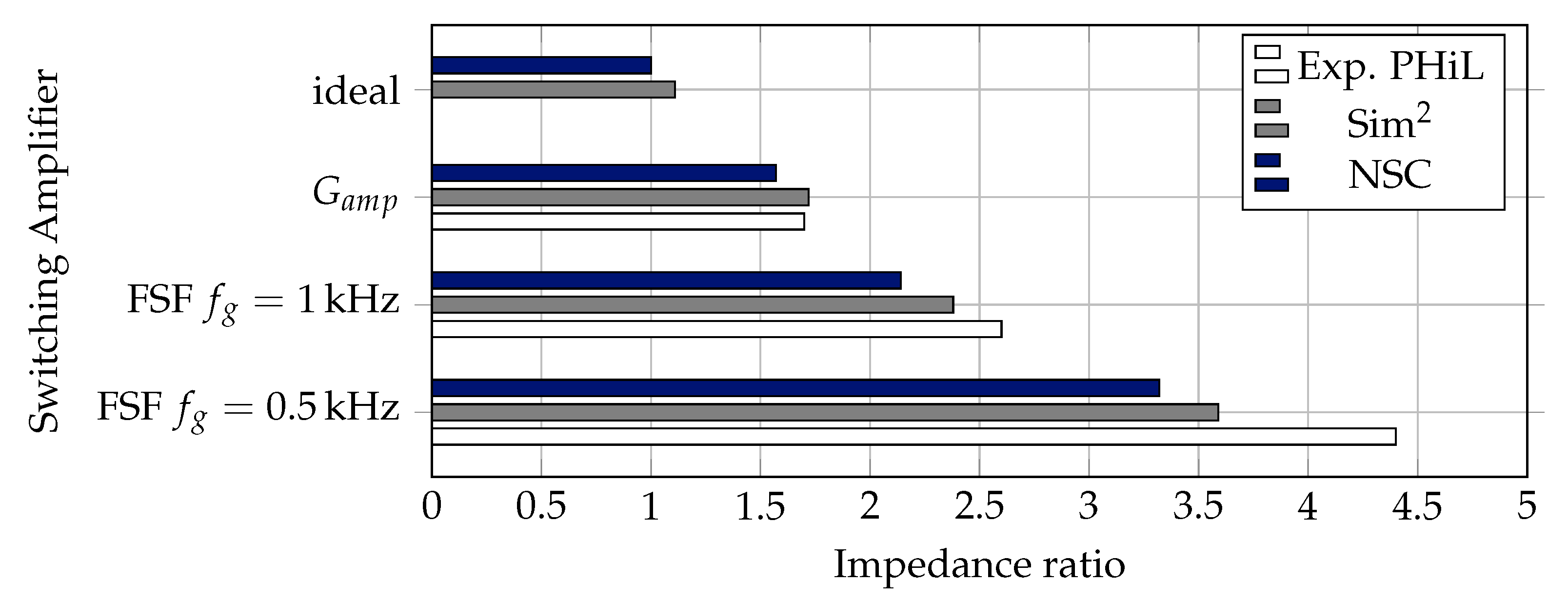
4.3.2. Influence of Amplifier Characteristics
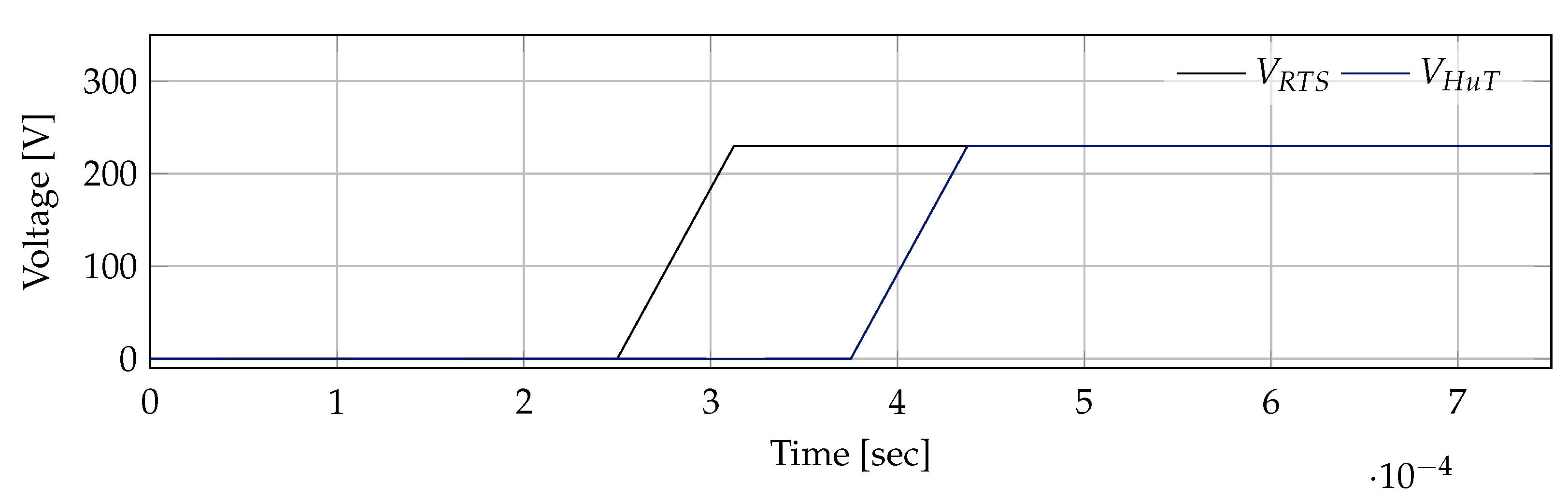
4.3.3. Influence of Feedback Signal Filtering and Time Delay
5. PHiL for Grid Applications
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| 4QA | Four Quadrant Amplifier |
| BSS | Battery Storage System |
| CHiL | Control-Hardware-in-the-Loop |
| DIM | Damping Impedance Model |
| DuT | Device unter Test |
| emt | Electro Magnetic Transient |
| EUT | Equipment under Test |
| FAU | Friedrich-Alexander University of Erlangen-Nürnberg |
| FSF | Feedback Signal Filtering |
| HIA | Hardware Inductance Addition Method |
| HiL | Hardware-in-the-Loop |
| HuT | Hardware under Test |
| IA | Interfacing Algorithm |
| ITM | Ideal Transformer Model |
| LEES | Institute of Electrical Energy Systems |
| LPF | Low Pass Filter |
| MRP | Multi-Rate Partitioning Method |
| NSC | Nyquist Stability Criterion |
| OLTF | Open Loop Transfer Function |
| PCC | Point of Common Coupling |
| PCD | Partial Circuit Duplication |
| PHiL | Power Hardware-in-the-Loop |
| PI | Power Interface |
| PV | Phovoltaic |
| RTS | Real Time Simulation |
| TFA | Time-variant First-order Approximation |
| TLM | Transmission Line Model |
Appendix A. Quantitative Data on Stability Limits

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methodology | Plain ITM | , w/o Filter | FSF 1.0 kHz | FSF 0.5 kHz |
|---|---|---|---|---|
| NSC | 1 | |||
| Simulative approach | ||||
| Experimental PHiL | n.a. |
| Methodology | Plain ITM | FCF 10.0 kHz | FCF 1.0 kHz | FCF 0.5 kHz | |
|---|---|---|---|---|---|
| NSC | 1 | ||||
| Sim2 | |||||
| Exp. PHiL | n.a. | n.a |
References
- Bruckner, T.; Bashmakov, I.A.; Mulugetta, Y.; Chum, H.; de la Vega Navarro, A.; Edmonds, J.; Faaij, A.; Fungtammasan, B.; Garg, A.; Hertwich, E.; et al. Energy Systems. In Climate Change 2014: Mitigation of Climate Change. Contribution of Working Group III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change (IPCC); Cambridge University Press: Cambridge, UK; New York, NY, USA, 2014. [Google Scholar]
- ISGAN Annex 6 Power T& D Systems—Ancillary Services from Distributed Energy Sources for a Secure and Affordable European System: Main Results from the SmartNet Projects. 2019. Available online: https://www.iea-isgan.org/smartnet (accessed on 20 December 2021).
- Lauss, G.; Strunz, K. Accurate and Stable Hardware-in-the-Loop (HIL) Real-Time Simulation of Integrated Power Electronics and Power Systems. IEEE Trans. Power Electron. 2021, 9, 10920–10932. [Google Scholar] [CrossRef]
- Guillo-Sansano, E.S.; Mazheruddin, H.; Roscoe, A.J.; Burt, G.M.; Coffele, F. Characterization of Time Delay in Power Hardware in the Loop Setups. IEEE Trans. Ind. Electron. 2021, 3, 2703–2713. [Google Scholar] [CrossRef]
- Nzimako, O.; Wierckx, R. Stability and Accuracy Evaluation of a Power Hardware in the Loop (PHIL) Interface with a Photovoltaic Micro-Inverter; IECON: Yokohama, Japan, 2015. [Google Scholar]
- Wang, S.; Li, B.; Xu, Z.; Zhao, X.; Xu, D. A Precise Stability Criterion for Power Hardware-in-the-Loop Simulation System. In Proceedings of the 10th International Conference on Power Electronics and ECCE Asia, Busan, Korea, 27–30 May 2019. [Google Scholar]
- Dolenc, J.; Bozicek, A.; Blazic, B. Stability Analysis of an Ideal-Transformer-Model Interface Algorithm. In Proceedings of the 7th International Youth Conference on Energy, Bled, Slovenia, 3–6 July 2019. [Google Scholar] [CrossRef]
- Riccobono, A.; Helmedag, A.; Berthold, A.; Averous, N.R.; de Doncker, R.W.; Monti, A. Stability and Accuracy Considerations of Power Hardware- in-the-Loop Test Benches for Wind Turbines. IFAC-PapersOnLine 2017, 1, 10977–10984. [Google Scholar] [CrossRef]
- Li, F.; Huang, Y.; Wu, F.; Zhang, X.; Zhao, W. Power-Hardware-in-the-Loop Stability Analysis of Inverter. In Proceedings of the 22nd International Conference on Electrical Machines and Systems (ICEMS), Habin, China, 11–14 August 2019. [Google Scholar] [CrossRef]
- Pokharel, M.; Ho, C.N.M. Stability Analysis of Power Hardware-in-the-Loop Architecture With Solar Inverter. IEEE Trans. Ind. Electron. 2021, 5, 4309–4319. [Google Scholar] [CrossRef]
- Marks, N.D.; Kong, W.Y.; Birt, D.S. Stability of a Switched Mode Power Amplifier Interface for Power Hardware-in-the-Loop. IEEE Trans. Ind. Electron. 2018, 11, 8445–8454. [Google Scholar] [CrossRef]
- Markou, A.; Kleftakis, V.; Kotsampopoulos, P.; Hatziargyriou, N. Improving Existing Methods for Stable and More Accurate Power Hardware-in-the-Loop Experiments; IEEE International Symposium on Industrial Electronics, Institute of Electrical and Electronics Engineers (ISIE): Edinburgh, UK, 2017. [Google Scholar] [CrossRef]
- Barakos, D.; Kotsampopoulos, P.; Vassilakis, A.; Kleftakis, V.; Hatziargyriou, N. Methods for Stability and Accuracy Evaluation of Power Hardware in the Loop Simulations. In Proceedings of the Mediterranean Conference on Power Generation, Transmission Distribution and Energy Convers(MedPower), Athens, Greece, 2–5 November 2014. [Google Scholar] [CrossRef]
- Lauss, G.; Lehfuß, F.; Viehweider, A.; Strasser, T. Power Hardware in the Loop Simulation with Feedback Current Filtering for Electric Systems. In Proceedings of the 37th Annual Conference of the IEEE Industrial Electronics Society (IECON 2011), Melbourne, Australia, 7–10 November 2011. [Google Scholar] [CrossRef]
- Ren, W.; Steurer, M.; Baldwin, T.L. Improve the Stability and the Accuracy of Power Hardware-in-the-Loop Simulation by Selecting Appropriate Interface Algorithms. IEEE Trans. Ind. Appl. 2008, 4, 1286–1294. [Google Scholar] [CrossRef]
- Lamo, P.; de Castro, A.; Sanchez, A.; Ruiz, G.A.; Azcondo, F.J.; Pigazo, A. Hardware-in-the-Loop and Digital Control Techniques Applied to Single-Phase PFC Converters. Electronics 2021, 10, 1563. [Google Scholar] [CrossRef]
- Ihrens, J.; Möws, S.; Wilkening, L.; Kern, T.A.; Becker, C. The Impact of Time Delays for Power Hardware-in-the-Loop Investigations. Energies 2021, 14, 3154. [Google Scholar] [CrossRef]
- Brandl, R. Operational Range of Several Interface Algorithms for Different Power Hardware-in-the-Loop Setups. Energies 2017, 10, 1946. [Google Scholar] [CrossRef] [Green Version]
- Kotsampopoulos, P.; Lagos, D.; Hatziargyriou, N.; Faruque, M.O.; Lauss, G.; Nzimako, O.; Forsyth, P.; Steurer, M.; Ponci, F.; Monti, A.; et al. A Benchmark System for Hardware-in-the-Loop Testing of Distributed Energy Resources. IEEE Power Energy Technol. Syst. J. 2018, 3, 94–103. [Google Scholar] [CrossRef]
- García-Martínez, E.; Sanz, J.F.; Muñoz-Cruzado, J.; Perié, J.M. A Review of PHIL Testing for Smart Grids—Selection Guide, Classification and Online Database Analysis. Electronics 2020, 9, 382. [Google Scholar] [CrossRef] [Green Version]
- Edrington, C.S.; Steurer, M.; Langston, J.; El-Mezyani, T.; Schoder, K. Role of Power Hardware in the Loop in Modeling and Simulation for Experimentation in Power and Energy Systems. Proc. IEEE 2015, 12, 2401–2409. [Google Scholar] [CrossRef]
- Faruque, M.O.; Strasser, T.; Lauss, G.; Jalili-Marandi, V.; Forsyth, P.; Dufour, C.; Dinavahi, V.; Monti, A.; Kotsampopoulos, P.; Martinez, J.A.; et al. Real-Time Simulation Technologies for Power Systems Design, Testing, and Analysis. IEEE Power Energy Technol. Syst. J. 2015, 10, 63–73. [Google Scholar] [CrossRef]
- Dargahi, M.; Ghosh, A.; Ledwich, G.; Zare, F. Studies in power hardware in the loop (PHIL) simulation using real-time digital simulator (RTDS). In Proceedings of the IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Bengaluru, India, 16–19 December 2012. [Google Scholar]
- Lehfuss, F.; Lauss, G.; Kotsampopoulos, P.; Hatziargyriou, N.; Crolla, P.; Roscoe, A. Comparison of multiple power amplification types for power Hardware-in-the-Loop applications. In IEEE Complexity in Engineering (COMPENG); IEEE: Piscataway, NJ, USA, 2012; pp. 1–6. [Google Scholar]
- Muhammad, M.; Behrends, H.; Geißendörfer, S.; Maydell, K.V.; Agert, C. Power Hardware-in-the-Loop: Response of Power Components in Real-Time Grid Simulation Environment. Energies 2021, 14, 593. [Google Scholar] [CrossRef]
- Noureen, S.S.; Shamim, N.; Roy, V.; Bayne, S.B. Real-Time Digital Simulators: A Comprehensive Study on System Overview, Application, and Importance. Int. J. Res. Eng. 2017, 266–277. [Google Scholar] [CrossRef]
- Kuffel, R.; Forsyth, P.; Peters, C. The Role and Importance of Real Time Digital Simulation in the Development and Testing of Power System Control and Protection Equipment. IFAC-PapersOnLine 2016, 27, 178–182. [Google Scholar] [CrossRef]
- CIGRE Working Group B4.57, Guide for the Development of Models for HVDC Converters in a HVDC Grid. 2017. Available online: https://e-cigre.org/publication/604 (accessed on 20 December 2021).
- Nzale, W.; Mahseredjian, J.; Kocar, I.; Fu, X.; Dufour, C. Two Variable Time-Step Algorithms for Simulation of Transients. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Resch, S.; Och, S.; Luther, M. Conception, Modelling Approach and Practical Implementation of a Hybrid Laboratory-Based Microgrid. In Proceedings of the Conference on Sustainable Energy Supply and Energy Storage Systems, Hamburg, Germany, 20–21 September 2018. [Google Scholar]
- Resch, S.; Luther, M. Reduction of Battery-Aging of a Hybrid Lithium-Ion and Vanadium-Redox-Flow Storage System in a Microgrid Application. In Proceedings of the 2nd IEEE International Conference on Industrial Electronics for Sustainable Energy Systems (IESES), Cagliari, Italy, 1–3 September 2020; pp. 80–85. [Google Scholar]
- Ren, W. Accuracy Evaluation of Power Hardware-in-the-Loop (PHIL) Simulation. Ph.D. Thesis, Florida State University, Tallahassee, FL, USA, 2007. [Google Scholar]
- Haineault, M.; Gregoire, L.A.; Paquin, J.N.; Bélanger, J. Key Considerations When Selecting Amplifiers for your Power Hardware-in-the-Loop (PHIL) Testbed; OPAL-RT TECHNOLOGIES Inc.: Montréal, QC, Canada, 2019. [Google Scholar]
- García-Martínez, E.; Ballestín, J.; Muñoz-Cruzado, J.; Sanz, J.F. Analysis of a switched and linear power amplifier for Power Hardware-in-the-Loop testing of Smartgrid systems. In Proceedings of the 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, 1–10 September 2019. [Google Scholar]
- Dmitriev-Zdorov, V.B. Generalized coupling as a way to improve the convergence in relaxation-based solvers. In Proceedings of the EURO-DAC EUROVHDL, Geneva, Switzerland, 16–20 September 1996; pp. 15–20. [Google Scholar]
- Hui, S.Y.R.; Fung, K.K.; Christopoulos, C. Decoupled simulation of DC-linked power electronic systems using transmission-line links. IEEE Trans. Power Electron. 1994, 9, 85–91. [Google Scholar] [CrossRef]
- Dargahi, M.; Ghosh, A.; Ledwich, G. Stability Synthesis of Power Hardware-in-the-Loop (PHIL) Simulation. In Proceedings of the IEEE PES General Meeting, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Westphal, L.C. Handbook of Control Systems Engineering, 2nd ed.; Springer: Boston, MA, USA, 2018. [Google Scholar] [CrossRef]
- Tremblay, O.; Fortin–Blanchette, H.; Gagnon, R.; Brissette, Y. Contribution to stability analysis of power hardware–in–the–loop simulators. IET Gener. Transm. Distrib. 2017, 12, 3073–3079. [Google Scholar] [CrossRef]























| Grid voltage (50 Hz) | kV | ||
| Grid impedance | m | ||
| Load impedance | |||
| LPF cut-off frequency | kHz | ||
| PV system rated power (three phase) | kW |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Resch, S.; Friedrich, J.; Wagner, T.; Mehlmann, G.; Luther, M. Stability Analysis of Power Hardware-in-the-Loop Simulations for Grid Applications. Electronics 2022, 11, 7. https://doi.org/10.3390/electronics11010007
Resch S, Friedrich J, Wagner T, Mehlmann G, Luther M. Stability Analysis of Power Hardware-in-the-Loop Simulations for Grid Applications. Electronics. 2022; 11(1):7. https://doi.org/10.3390/electronics11010007
Chicago/Turabian StyleResch, Simon, Juliane Friedrich, Timo Wagner, Gert Mehlmann, and Matthias Luther. 2022. "Stability Analysis of Power Hardware-in-the-Loop Simulations for Grid Applications" Electronics 11, no. 1: 7. https://doi.org/10.3390/electronics11010007