
Electro-Thermal Model-Based Design of Bidirectional On-Board Chargers in Hybrid and Full Electric Vehicles


Abstract
:1. Introduction
1.1. Motivations
1.2. State of the Art on OBC Modelling, Simulation and Control
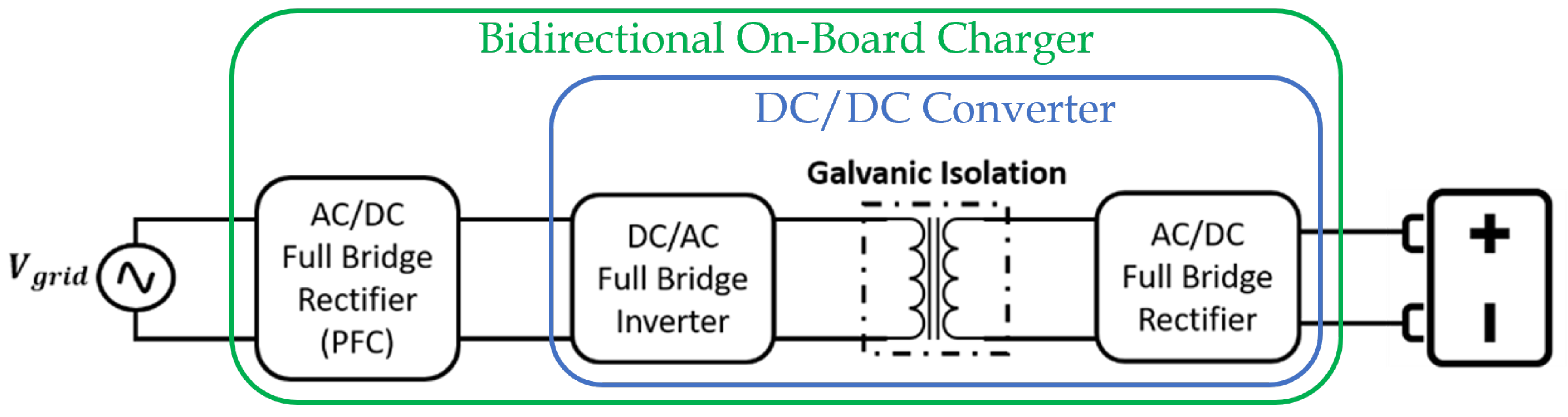
2. On-Board Charger Model and Control
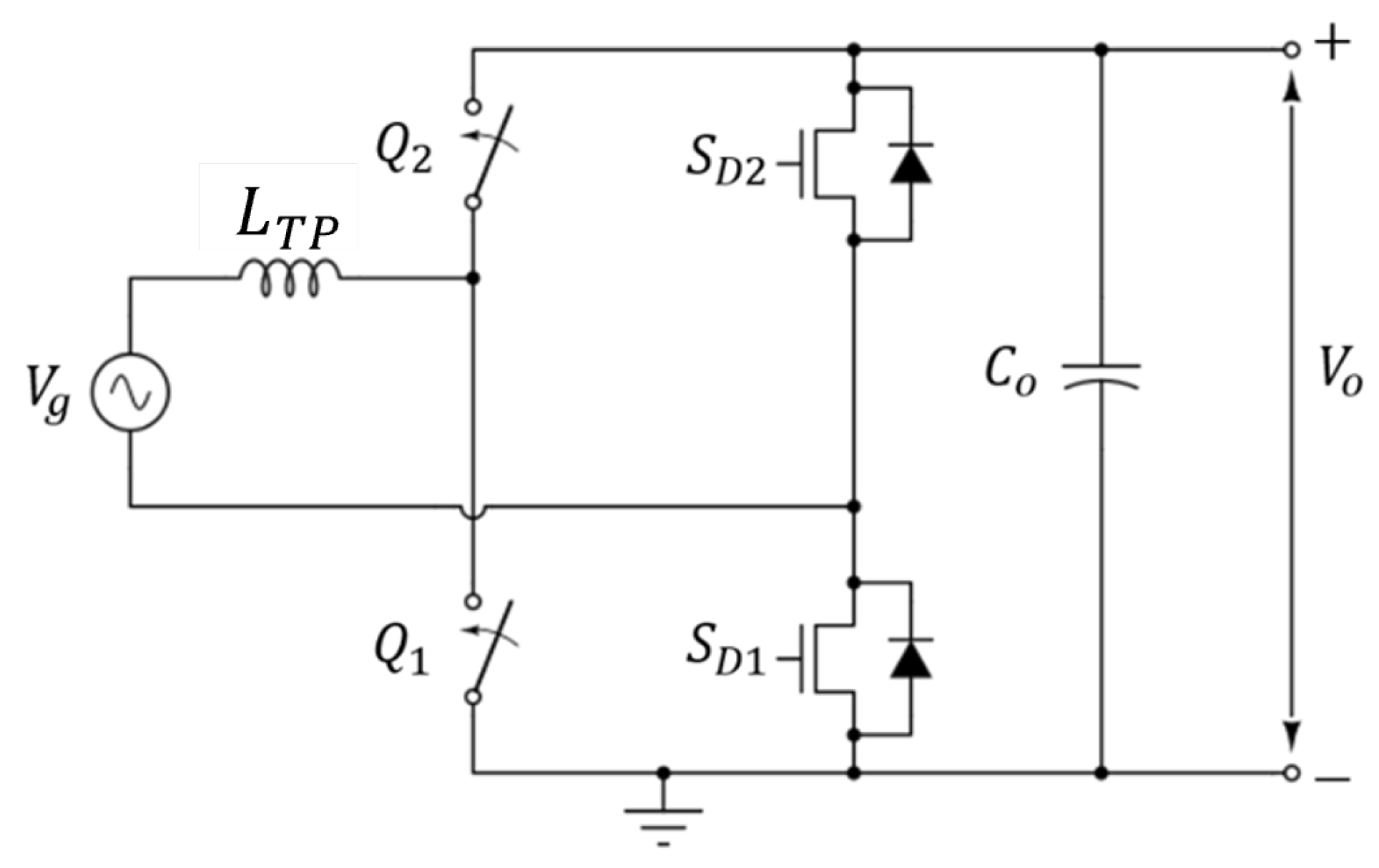
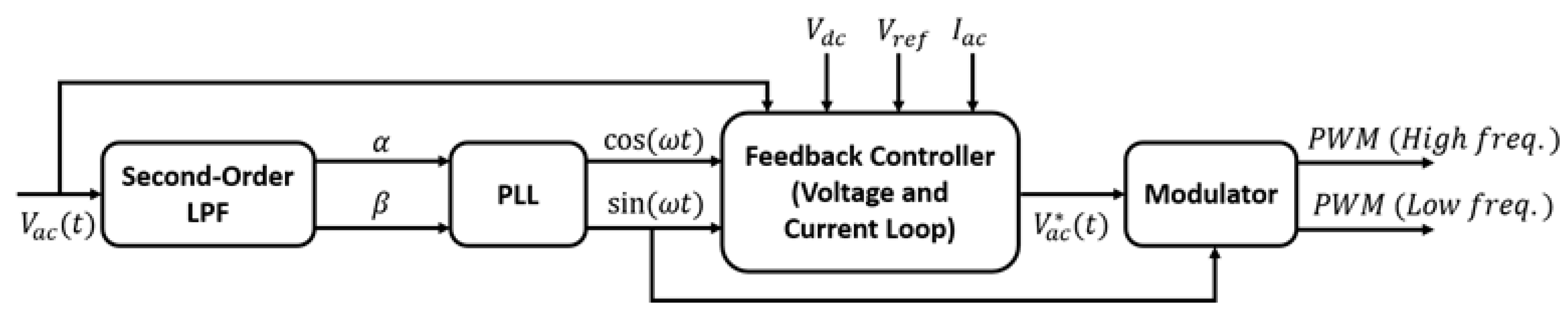
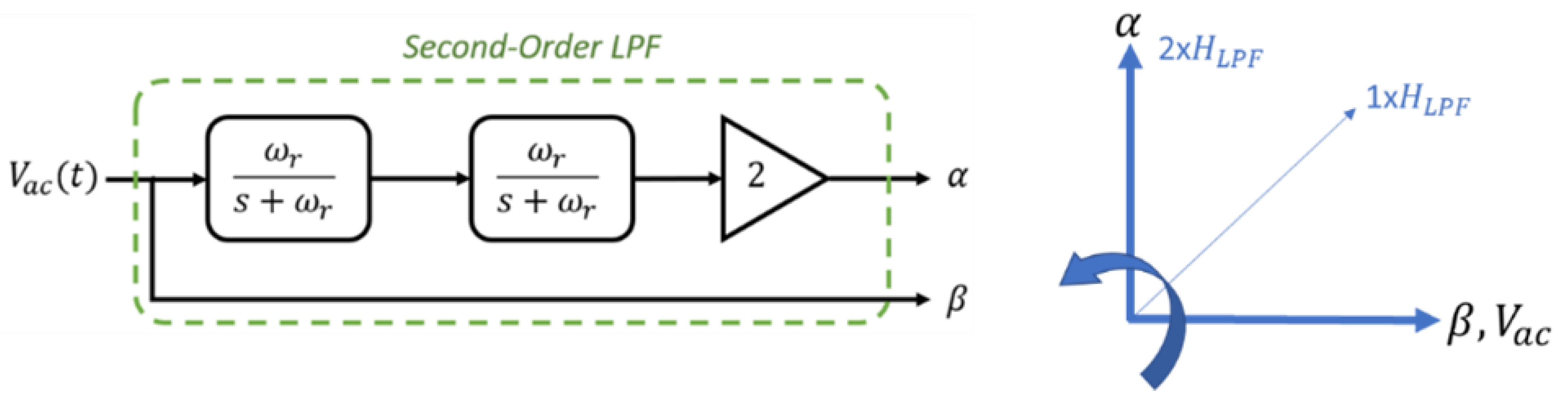
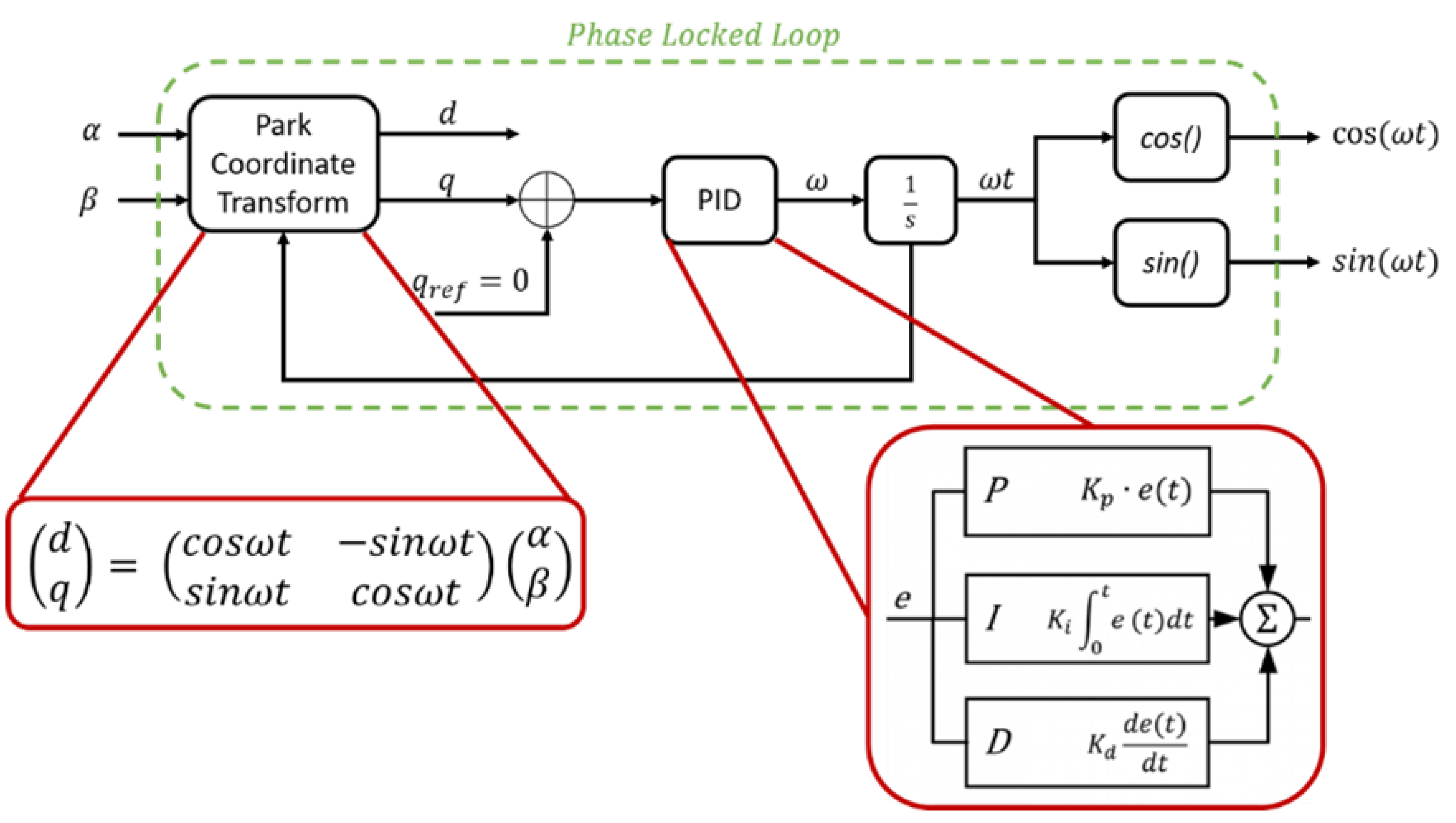
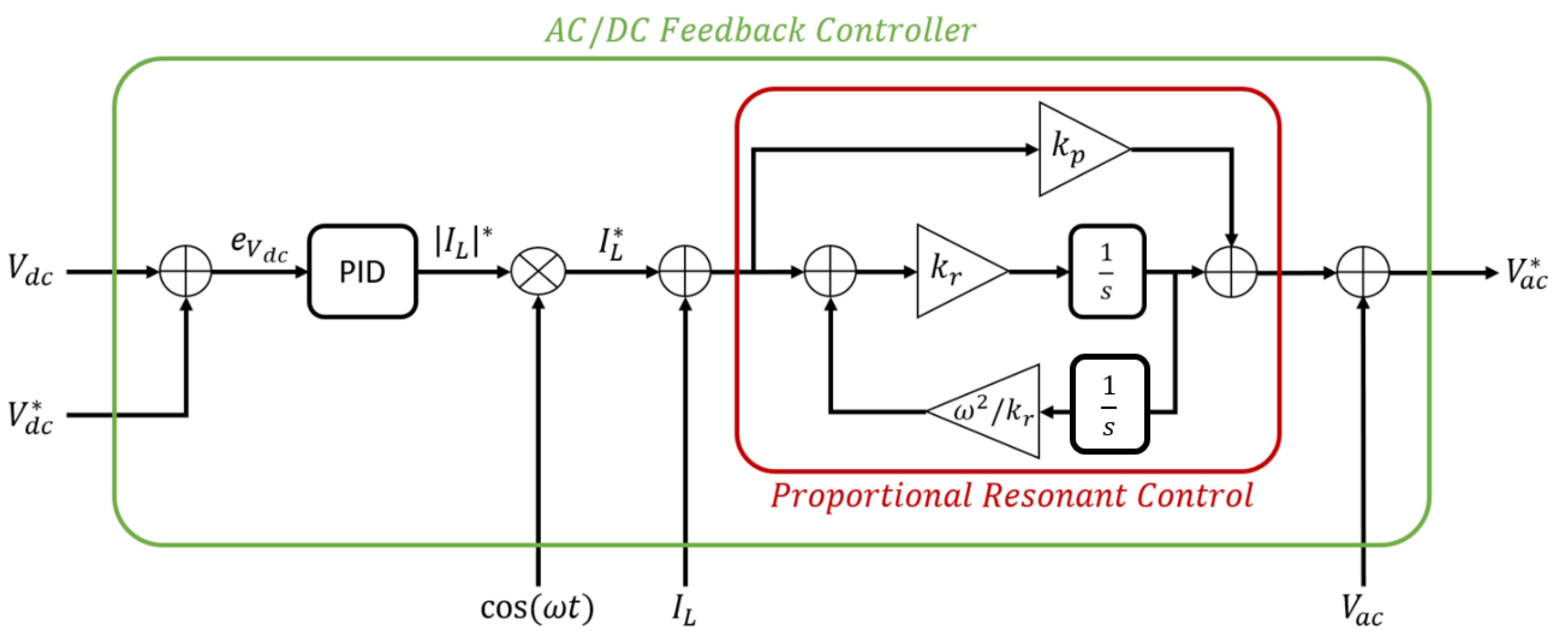
2.1. AC/DC Converter Modelling and Control
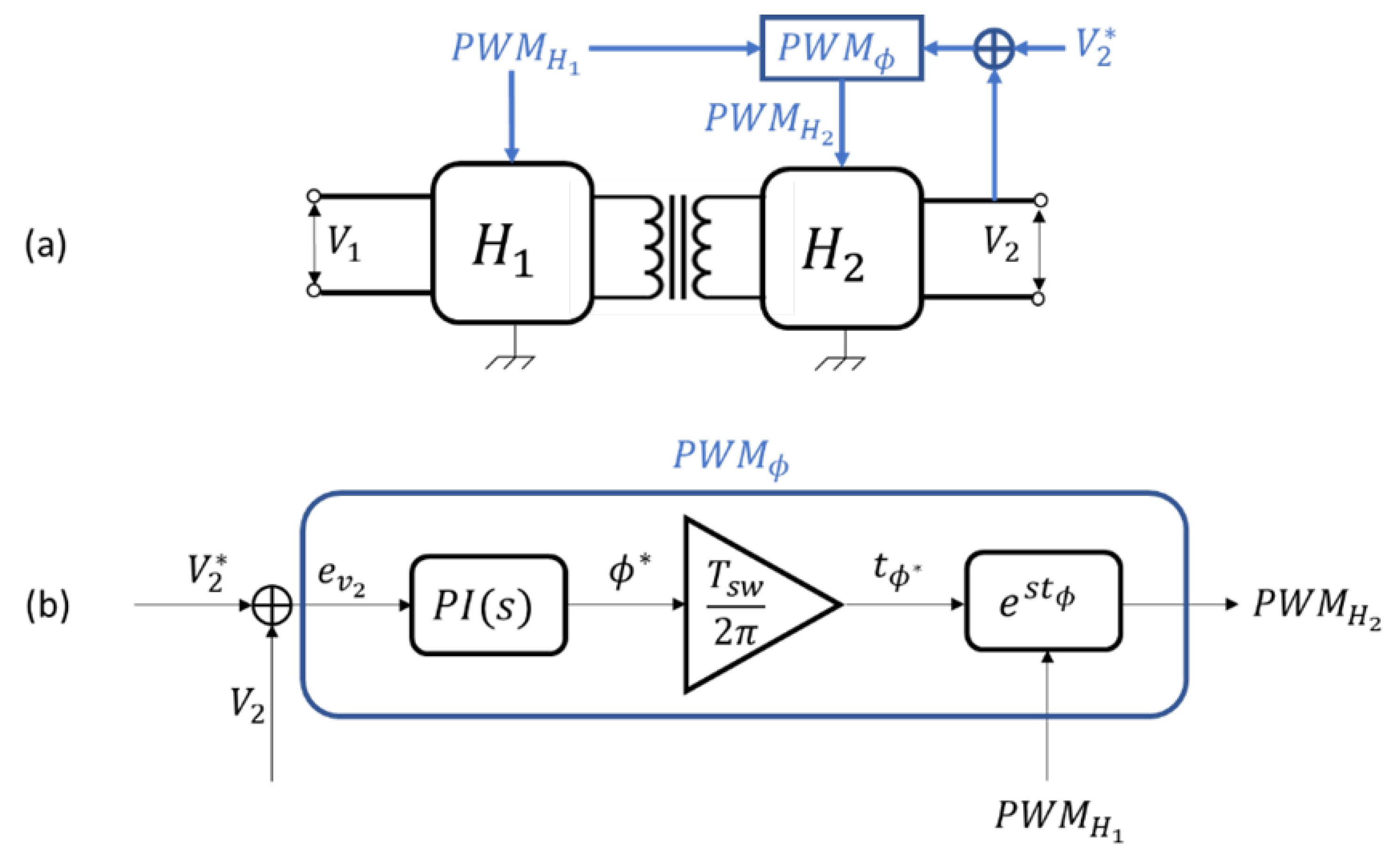
2.2. DC/DC Converter Modelling and Control
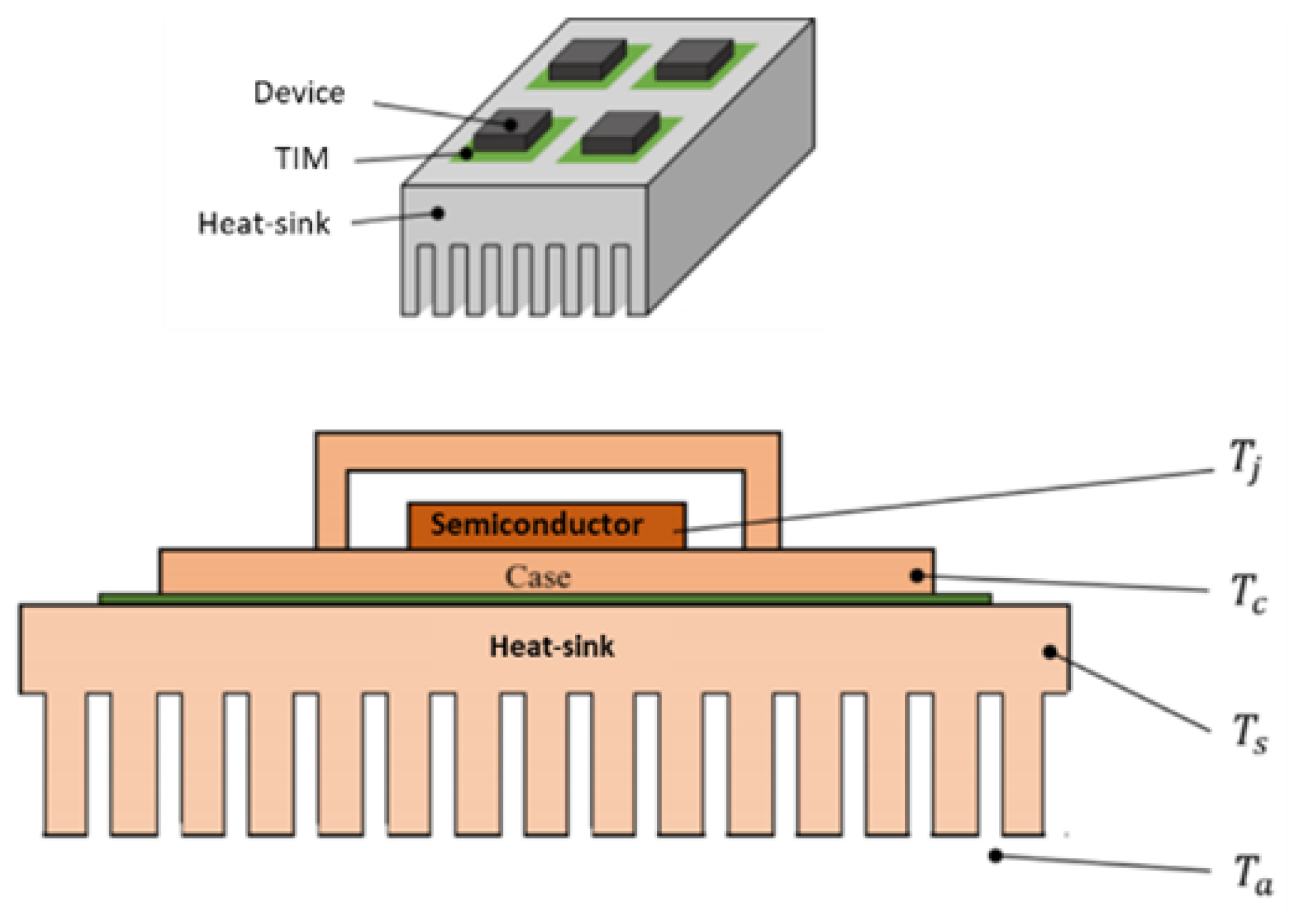
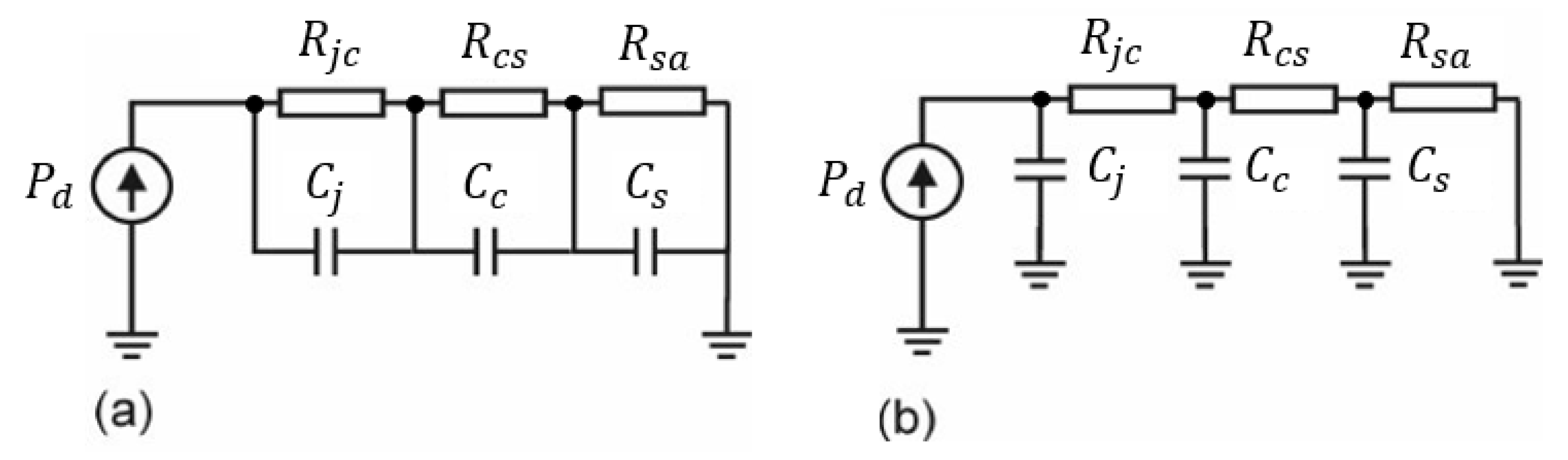
2.3. Thermal Modelling of Switching Devices
3. Sizing and Selection of Real Devices for Realistic Model-Based Validation
3.1. Totem Pole
3.2. Dual Active Bridge
3.3. Switching Devices
4. Simulation Analysis
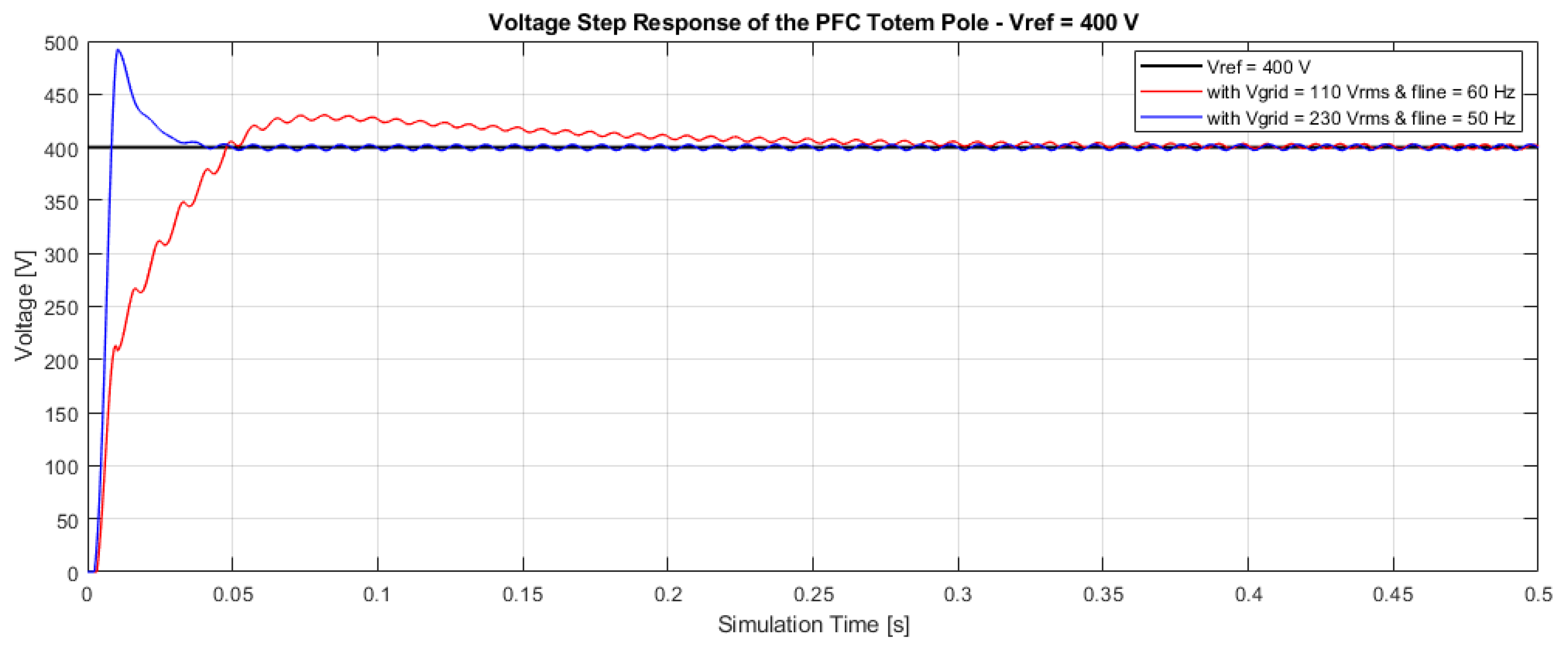
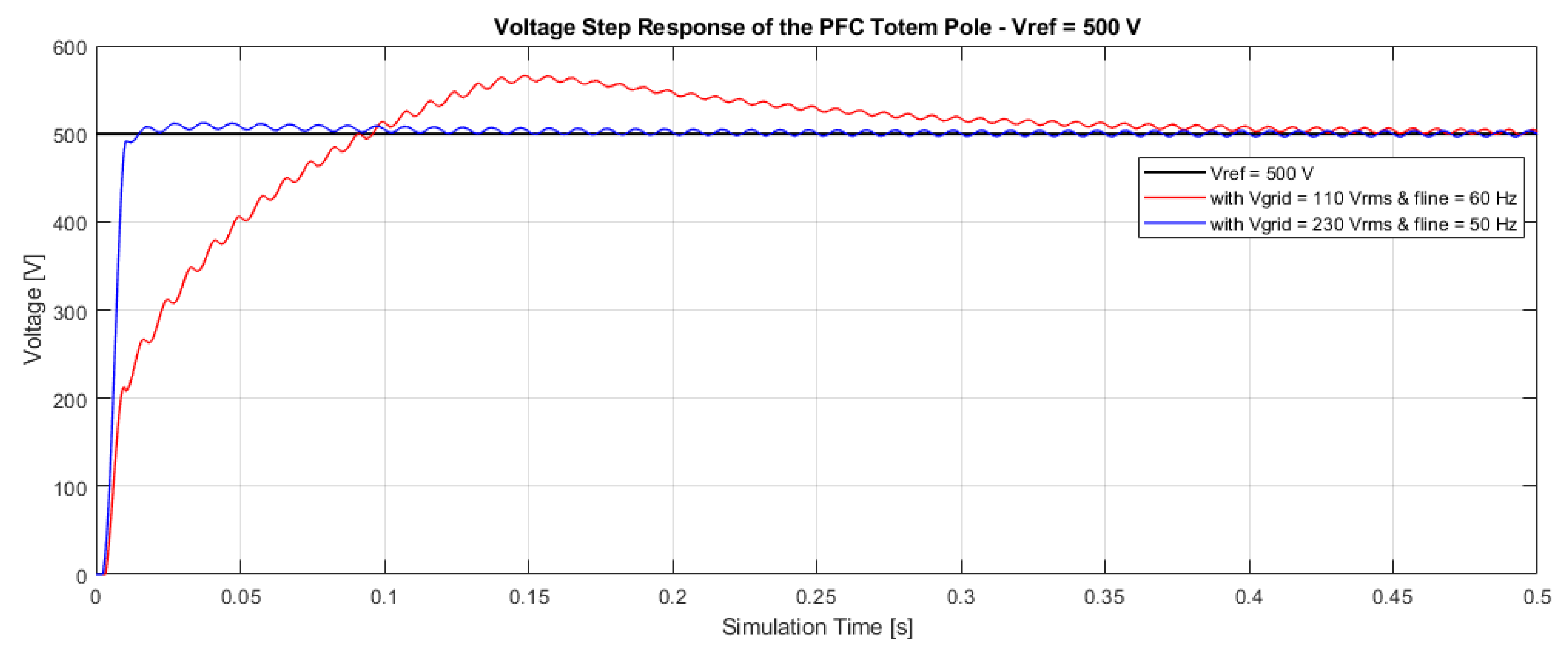
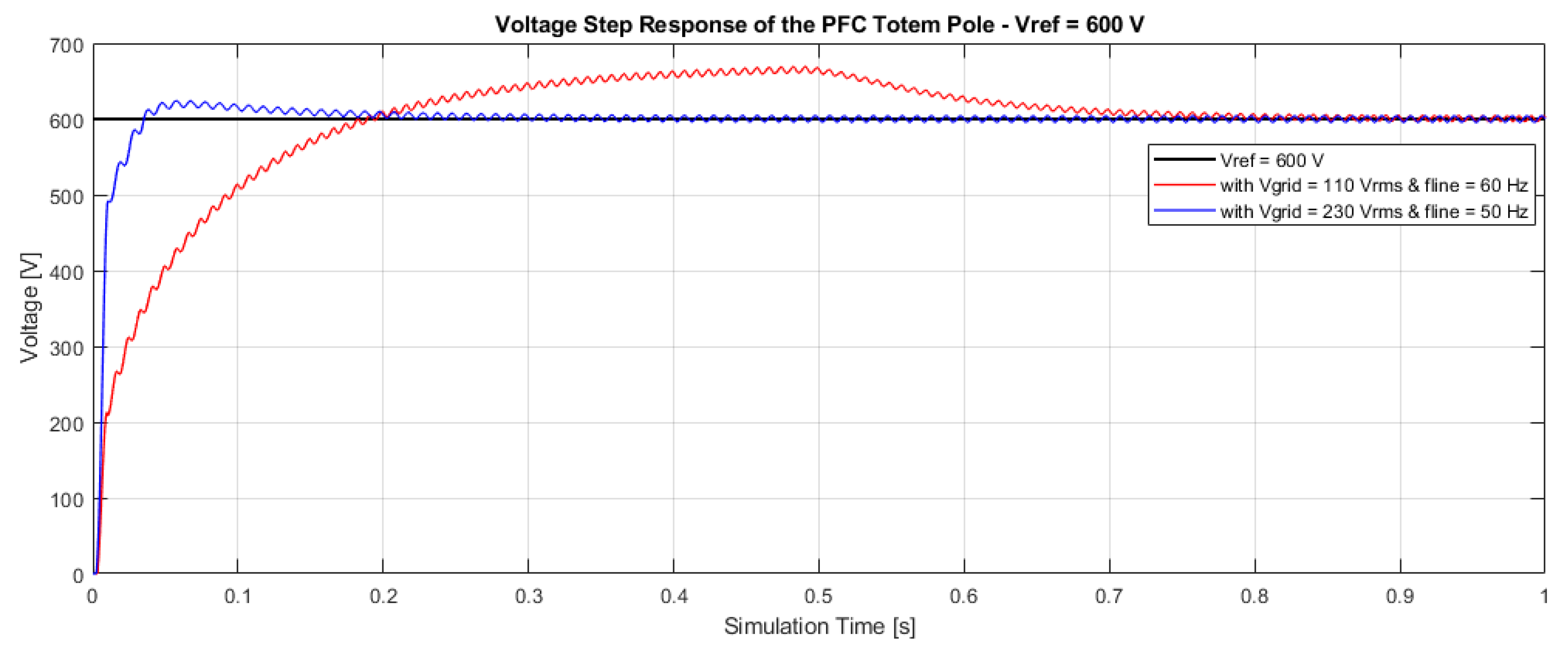
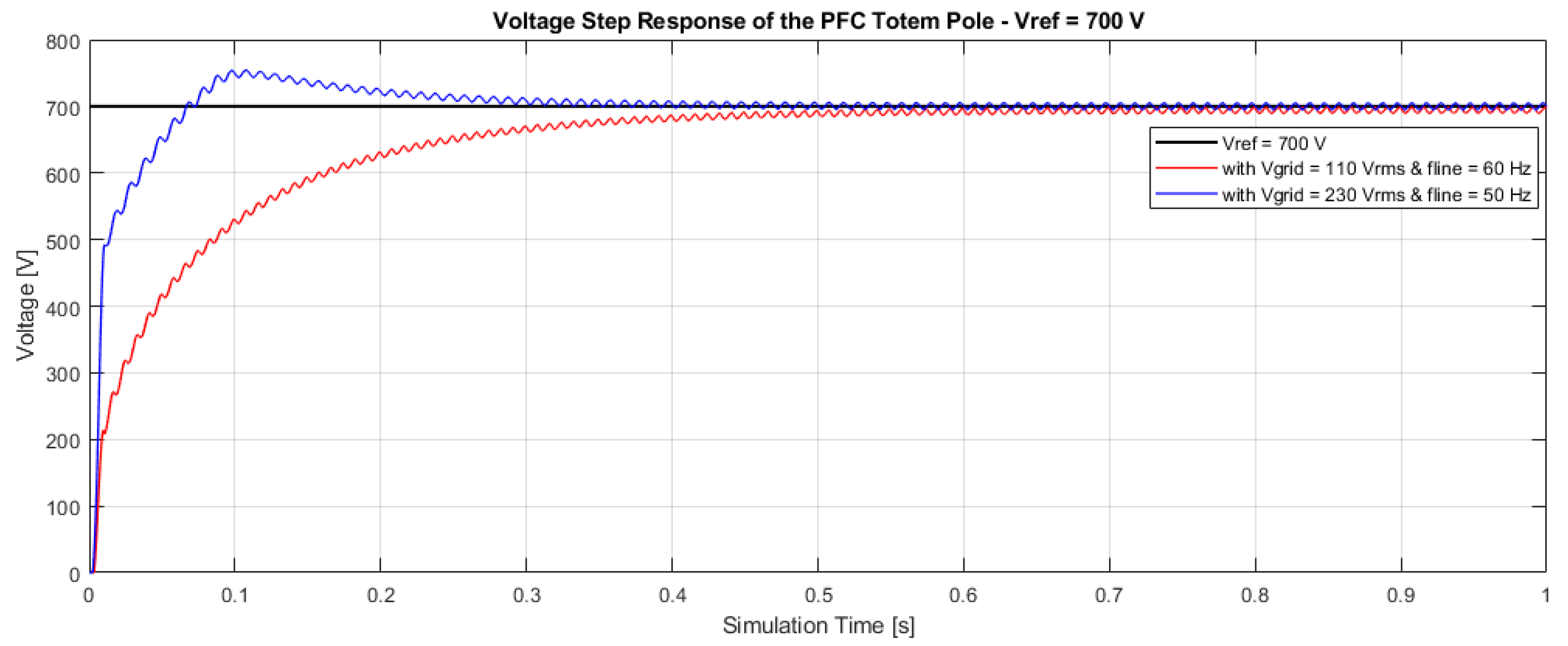
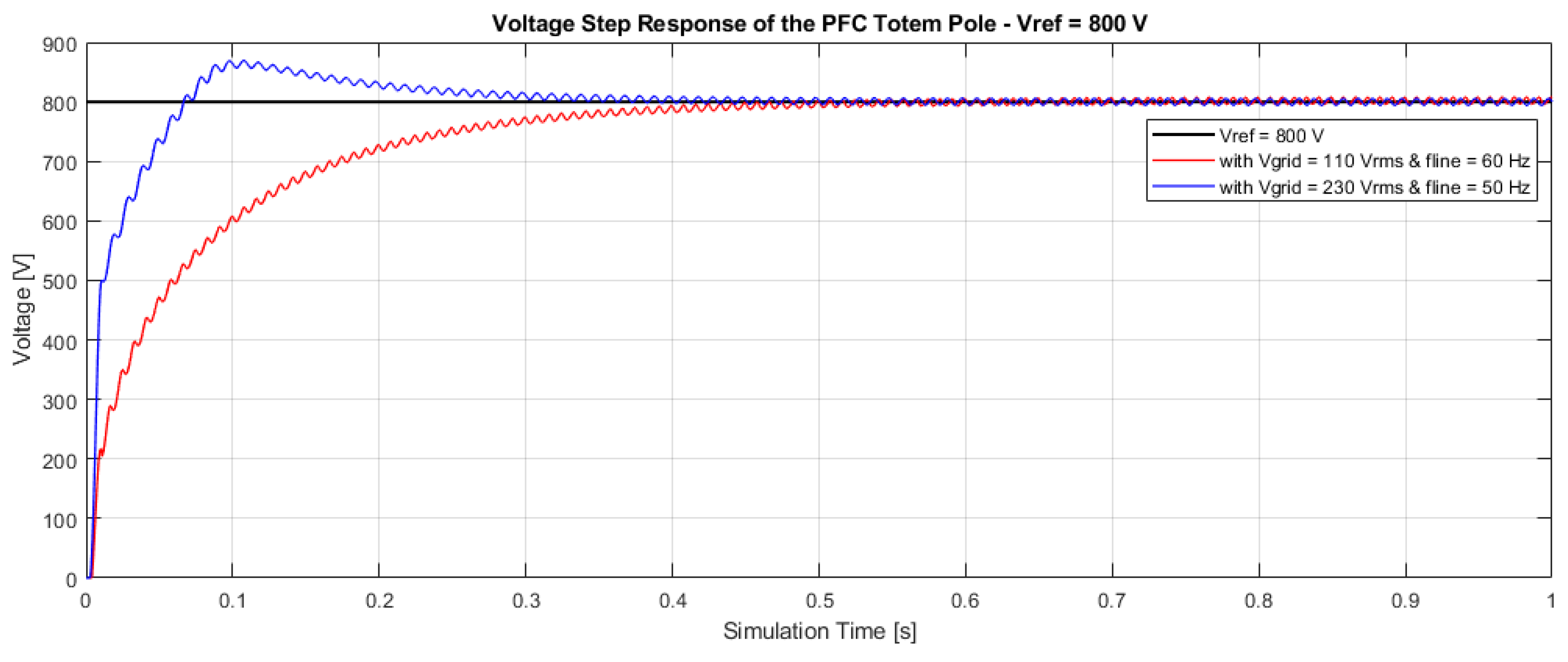
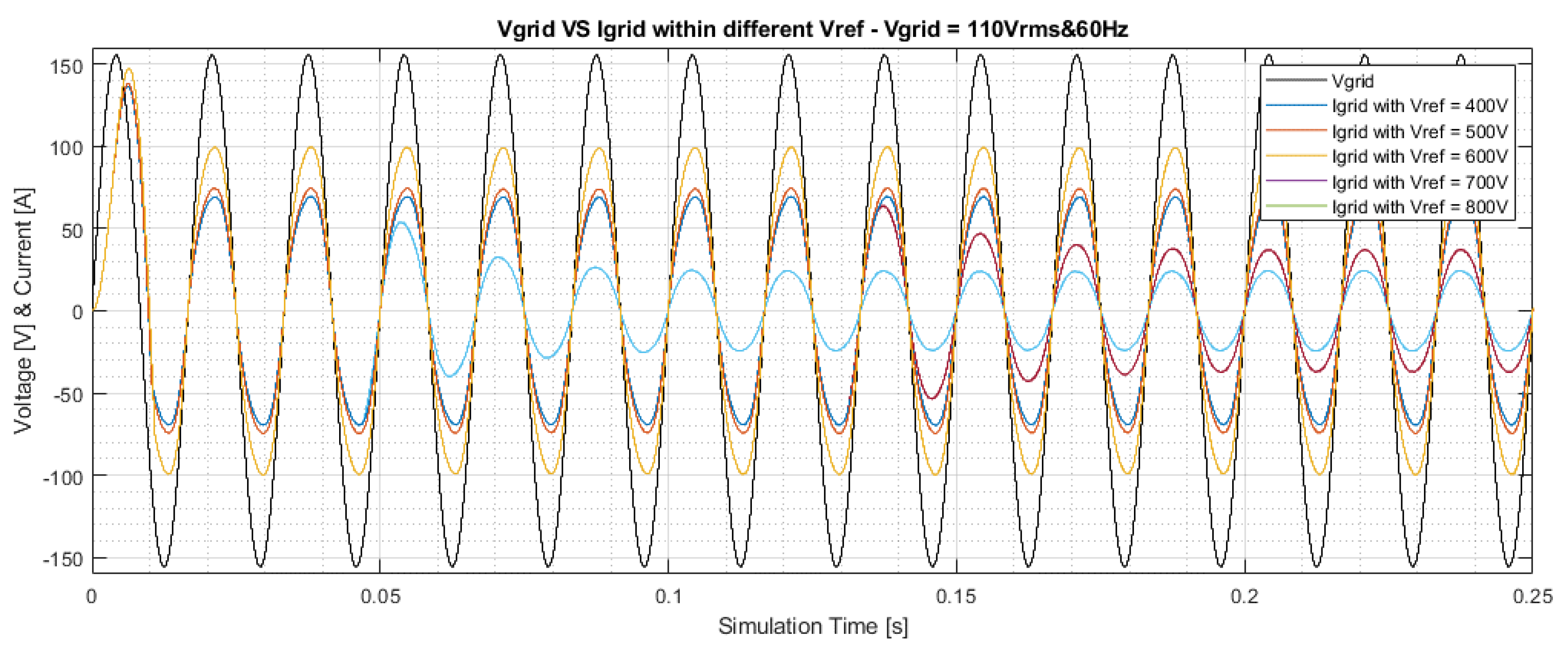
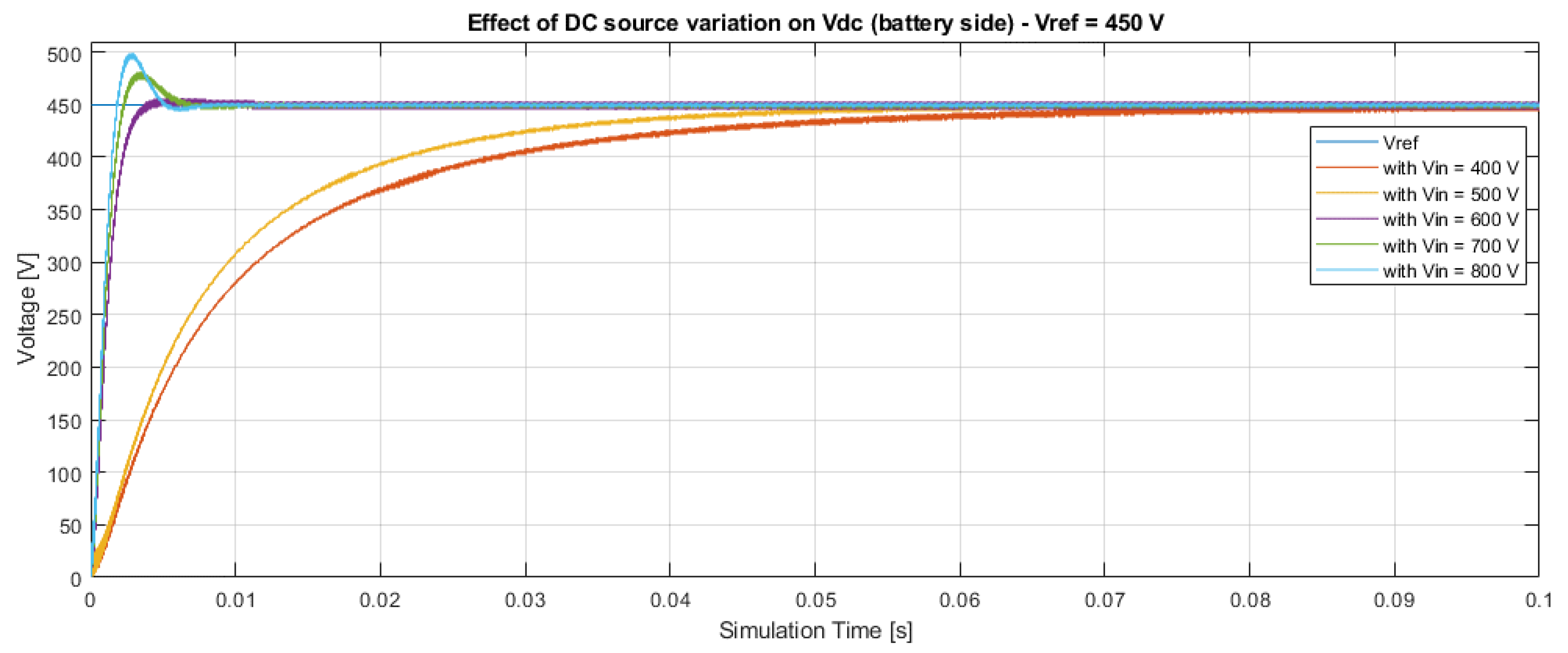
4.1. Control of the Totem Pole Converter
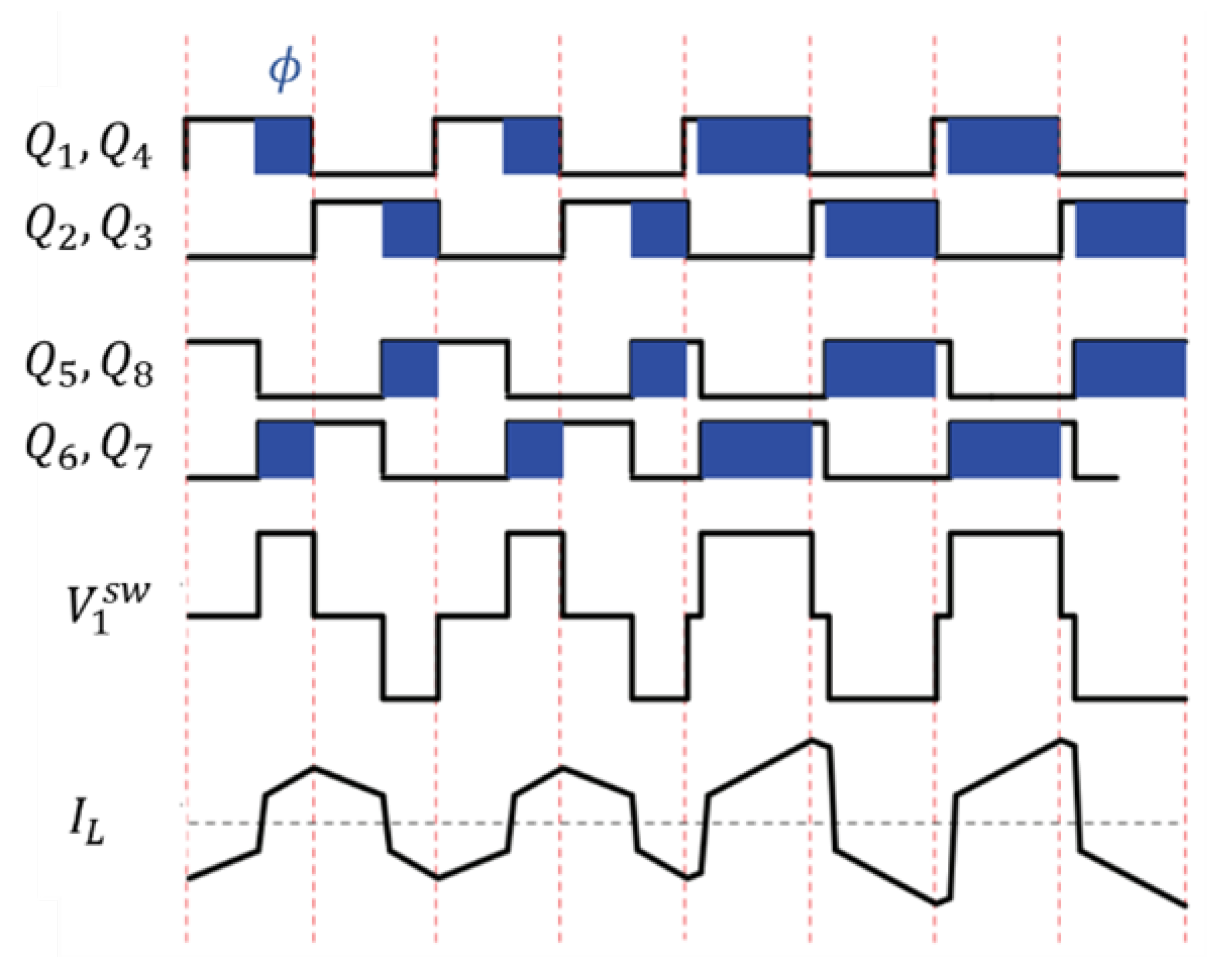
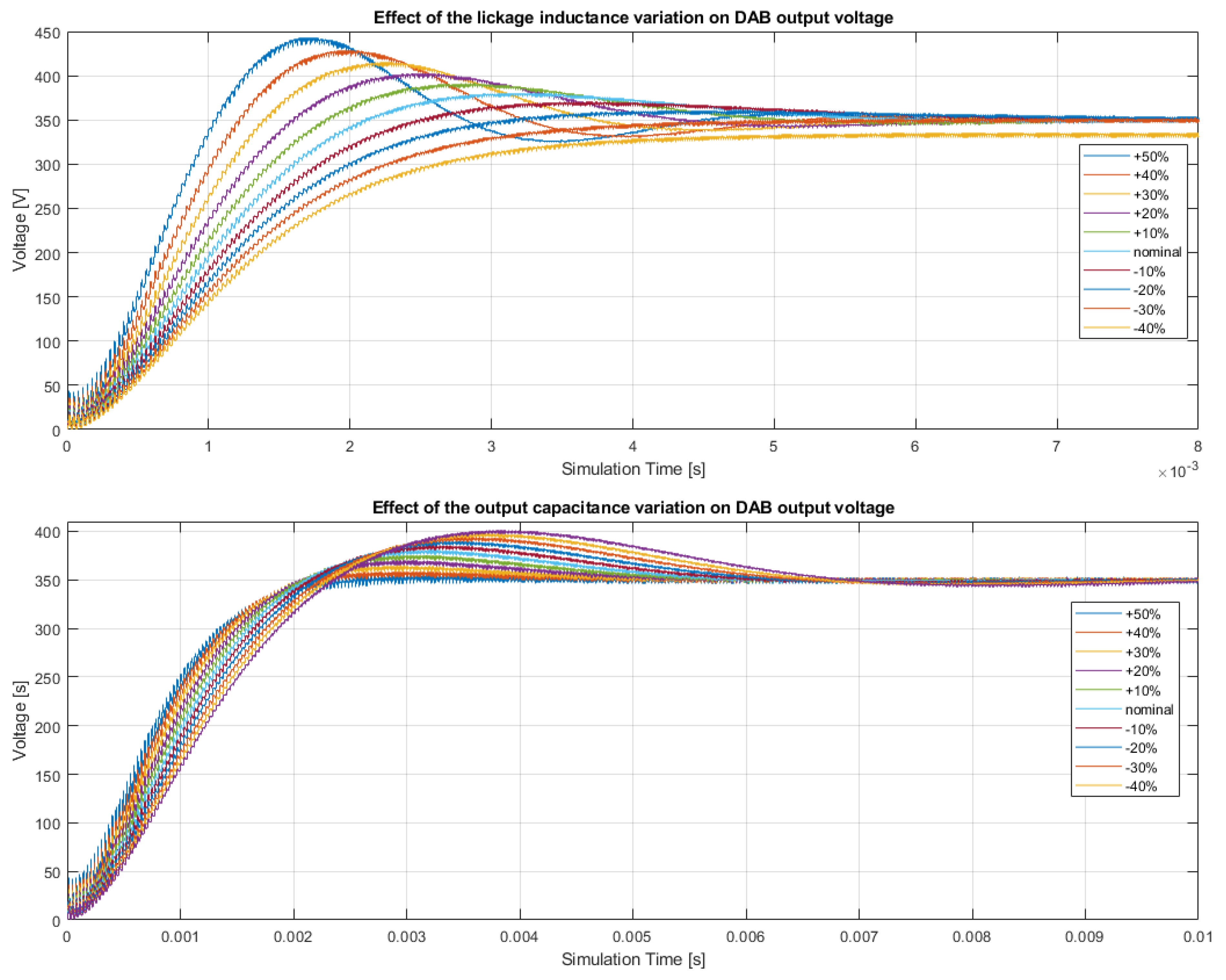
4.2. Control of the Dual Active Bridge Converter
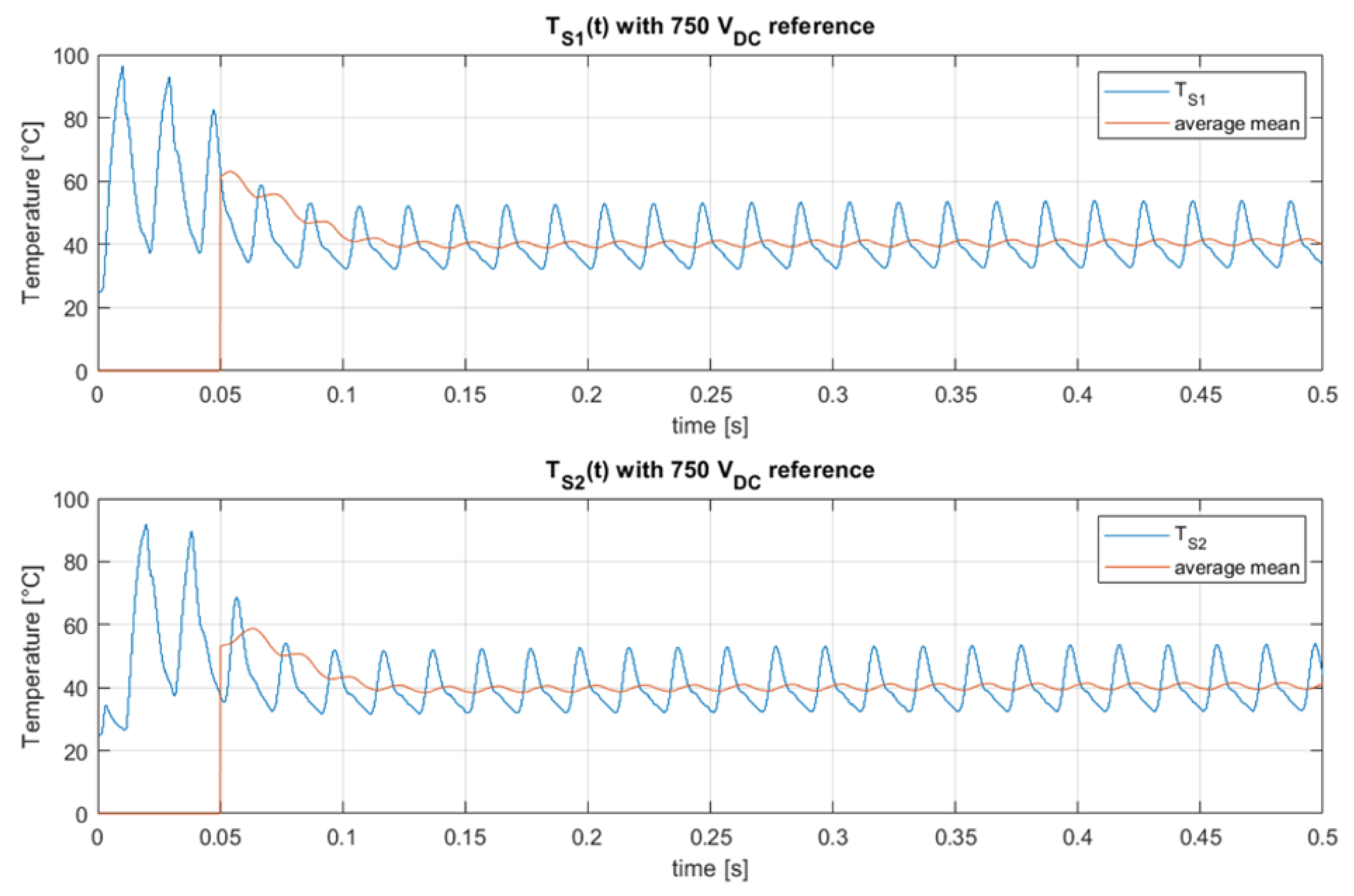
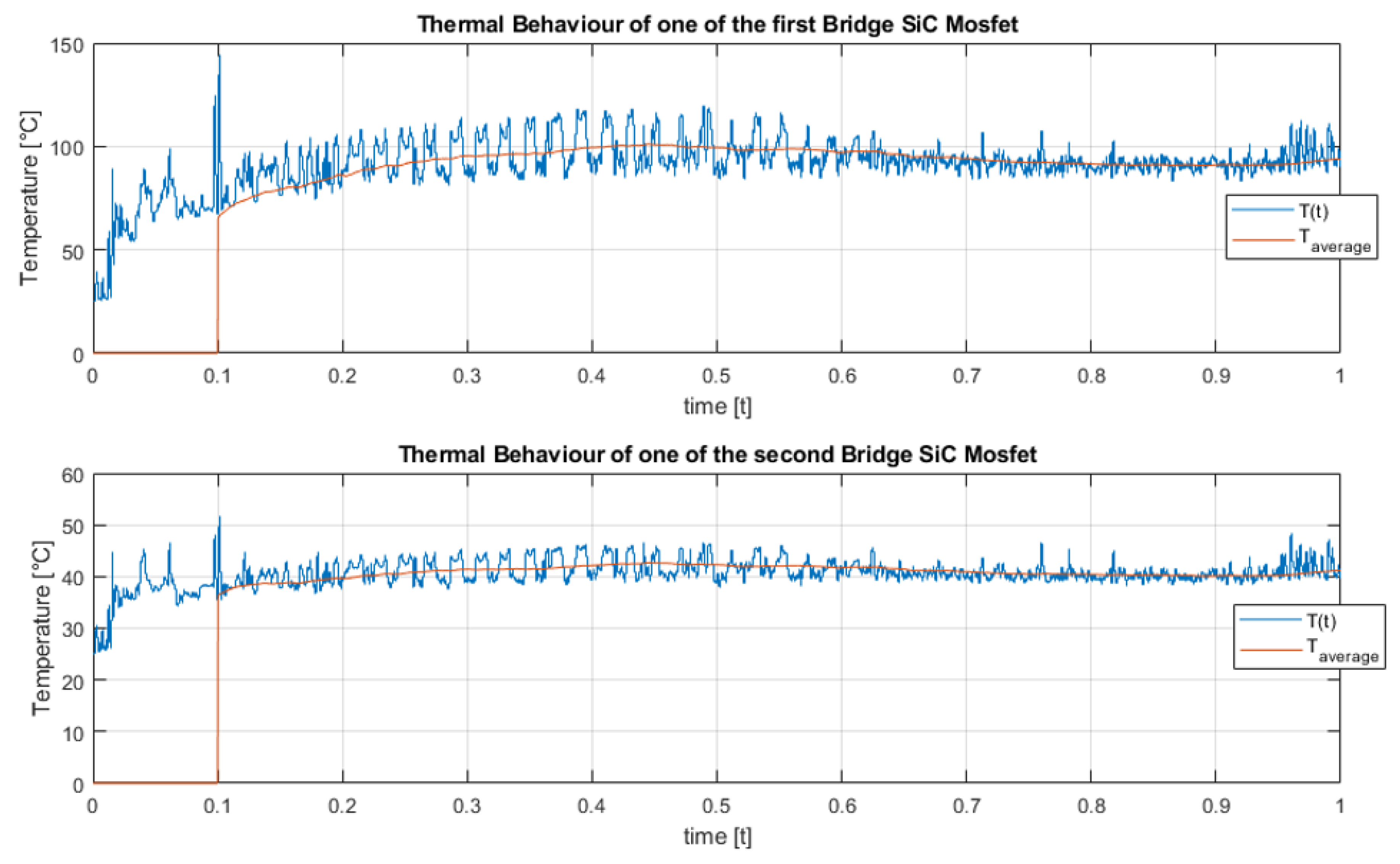
4.3. Thermal Behavior
5. Results Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Xu, R.; Fang, W.; Liu, X.D.; Liu, Y.; Hu, Y.; Liu, Y.F. Design and experimental verification of on-board charger for electric vehicle. In Proceedings of the 2014 International Power Electronics and Application Conference and Exposition, Shanghai, China, 5–8 November 2014; pp. 1422–1427. [Google Scholar]
- Cao, L.; Li, H.; Zhang, H. Model-free power control of front-end PFC AC/DC converter for on-board charger. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 2719–2723. [Google Scholar]
- Noh, J.H.; Song, S.i.; Hur, D.J. Numerical Analysis of the Cooling Performance in a 7.2 kW Integrated Bidirectional OBC/LDC Module. Appl. Sci. 2020, 10, 270. [Google Scholar] [CrossRef] [Green Version]
- Ramesh, P.; Patra, A.; Kastha, D. Design and Simulation of an On-Board Integrated Charger using Cell Bypass Balancing Circuit for Electric Vehicles. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2032–2037. [Google Scholar]
- Zhu, X.; Kong, L.; Yang, X.; Xu, Y. Design of Vehicle Charger for Pure Electric Vehicle Based on MATLAB Simulation. J. Phys. Conf. Ser. 2020, 1635, 12020. [Google Scholar] [CrossRef]
- Tao, H.; Zhang, G.; Zheng, Z. Onboard charging DC/DC converter of electric vehicle based on synchronous rectification and characteristic analysis. J. Adv. Transp. 2019, 2019, 1–10. [Google Scholar] [CrossRef]
- Nguyen, H.V.; Lee, D.C. Advanced single-phase onboard chargers with small DC-link capacitors. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–6. [Google Scholar]
- Kim, I.; Lee, S.; Park, J.W. Design and Control of OBC-LDC Integrated Circuit with Variable Turns Ratio for Electric Vehicles. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 885–890. [Google Scholar]
- Gaurav, A.; Gaur, A. Modelling of Hybrid Electric Vehicle Charger and Study the Simulation Results. In Proceedings of the 2020 International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), Patna, India, 10–11 July 2020; pp. 1–6. [Google Scholar]
- Tian, H.; Tzelepis, D.; Papadopoulos, P.N. Electric Vehicle charger static and dynamic modelling for power system studies. Energies 2021, 14, 1801. [Google Scholar] [CrossRef]
- He, W.; Wei, Y.; Zhu, P.; Peng, W. Research on Totem—Pole Bridgeless PFC Based on Synchronous Reference Frame. In Proceedings of the 2018 Joint International Advanced Engineering and Technology Research Conference (JIAET 2018); Atlantis Press: Paris, France, 2018. [Google Scholar]
- Liu, C.; Li, C.; Mei, W.; Xu, C.; Diao, L. Research on Principle and Control Method of Totem-Pole PFC. In International Conference on Electrical and Information Technologies for Rail Transportation; Springer: Berlin/Heidelberg, Germany, 2019; pp. 481–487. [Google Scholar]
- Winck, R.C.; Kim, J.; Book, W.J.; Park, H. A control loop structure based on semi-nonnegative matrix factorization for input-coupled systems. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 3484–3489. [Google Scholar]
- Zammit, D.; Staines, C.S.; Apap, M.; Licari, J. Design of PR current control with selective harmonic compensators using Matlab. J. Electr. Syst. Inf. Technol. 2017, 4, 347–358. [Google Scholar] [CrossRef]
- Zhang, N.; Tang, H.; Yao, C. A systematic method for designing a PR controller and active damping of the LCL filter for single-phase grid-connected PV inverters. Energies 2014, 7, 3934–3954. [Google Scholar] [CrossRef]
- Sha, D.; Xu, G. High-Frequency Isolated Bidirectional Dual Active Bridge DC–DC Converters with Wide Voltage Gain; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Zhou, Z.; Holland, P.; Igic, P. Compact thermal model of a three-phase IGBT inverter power module. In Proceedings of the 2008 26th International Conference on Microelectronics, Nis, Serbia and Montenegro, 11–14 May 2008; pp. 167–170. [Google Scholar]
- Gong, X.; Wang, G.; Bhardwaj, M. 6.6 kW three-phase interleaved totem pole PFC design with 98.9% peak efficiency for HEV/EV onboard charger. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 2029–2034. [Google Scholar]
- Rodriguez, A.; Vazquez, A.; Lamar, D.G.; Hernando, M.M.; Sebastian, J. Different purpose design strategies and techniques to improve the performance of a dual active bridge with phase-shift control. IEEE Trans. Power Electron. 2014, 30, 790–804. [Google Scholar] [CrossRef]
- TRANPHORM. 900V Cascode GaN FET in TO-247 (Source Tab). Available online: https://www.mouser.it/datasheet/2/970/datasheet_tp90h050ws_20200713-1837943.pdf (accessed on 1 November 2021).
- Semiconductor, O. SiC Power, Single N-Channel, D2PAK-7L. Available online: https://www.onsemi.com/pdf/datasheet/ntbg040n120sc1-d.pdf (accessed on 1 November 2021).
- ST. Ultrafast Recovery-High Voltage Diode. Available online: https://www.mouser.it/datasheet/2/389/cd00096485-1796430.pdf (accessed on 1 November 2021).
- INSTRUMENT, T. Bidirectional, Dual Active Bridge Reference Design for Level 3 Electric Vehicle Charging Stations. Available online: https://www.ti.com/lit/ug/tidues0b/tidues0b.pdf?ts=1634826422751&ref_url=https%253A%252F%252Fwww.google.fr%252F (accessed on 1 November 2021).
- INSTRUMENT, T. Designing a 99% Efficient Totem Pole PFC with GaN. Available online: https://training.ti.com/designing-99-efficient-totem-pole-pfc-gan (accessed on 1 November 2021).





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Passive components and assumptions | |
| Totem Pole input inductance | 300 H |
| Totem pole output capacitor | 500 F |
| DAB primary side inductance | 150 H |
| DAB output capacitor | 300 F |
| Rated Output Power | 7.2 kW |
| Totem Pole GaN switching frequency | 300 kHz |
| DAB SiC switching frequency | 100 kHz |
| AC input source | 110 Vrms and 60 Hz |
| 230 Vrms and 50 Hz | |
| DC output voltage (battery side) | 200–450 V (adjustable) |
| Totem Pole DC Bus | 450–800 V (adjustable) |
| GaN MOSFET Key Specifications | |
| 900 V | |
| 63 m | |
| (pulsed-continuous) | 150 − 44 A |
| 1.05 °C/W | |
| SiC MOSFET Key Specifications | |
| 1200 V | |
| 56 m | |
| 240 − 65 A | |
| 0.4 °C/W |
| Functional Specification | Rating |
|---|---|
| Total output power | 10 kW (500 V/20) |
| Operating frequency | 100–200 kHz |
| Input voltage of transformer | 800 V ( V), Bipolar Square waveform |
| Volt-second product | 8000 Vs – for V, 100 kHz |
| Primary-to-secondary ratio | 24:15 |
| Primary current maximum | 13.5 –for V |
| Secondary current maximum | 20 –for V |
| Estimated power losses | 50 W–for V and 100 kHz |
| Primary winding DC resistance | 43 m |
| Secondary winding DC resistance | 16 m |
| Leakage inductance | 34 H |
| Magnetizing inductance | 720 H |
| Operating Condition | ||||
|---|---|---|---|---|
| (230 Vrms and 50 Hz; 400 V) | 0.01 s | 0.030 s | 20% | <1% |
| (110 Vrms and 60 Hz; 400 V) | 0.04 s | 0.150 s | 5 % | <1% |
| (110 Vrms and 60 Hz; 500 V) | 0.07 s | 0.300 s | 13% | <1% |
| (230 Vrms and 50 Hz; 500 V) | 0.01 s | 0.015 s | 2.5% | ∼0 |
| (110 Vrms and 60 Hz; 600 V) | 0.15 s | 0.800 s | 11.5% | ∼0 |
| (230 Vrms and 50 Hz; 600 V) | 0.02 s | 0.100 s | 4.2% | ∼0 |
| (110 Vrms and 60 Hz; 700 V) | 0.25 s | 0.350 s | 10% | < 1% |
| (230 Vrms and 50 Hz; 700 V) | 0.04 s | 0.250 s | 6.5% | ∼0 |
| (110 Vrms and 60 Hz; 800 V) | 0.25 s | 0.350 s | 10% | ∼2% |
| (230 Vrms and 50 Hz; 800 V) | 0.04 s | 0.280 s | 6.7% | ∼0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dini, P.; Saponara, S. Electro-Thermal Model-Based Design of Bidirectional On-Board Chargers in Hybrid and Full Electric Vehicles. Electronics 2022, 11, 112. https://doi.org/10.3390/electronics11010112
Dini P, Saponara S. Electro-Thermal Model-Based Design of Bidirectional On-Board Chargers in Hybrid and Full Electric Vehicles. Electronics. 2022; 11(1):112. https://doi.org/10.3390/electronics11010112
Chicago/Turabian StyleDini, Pierpaolo, and Sergio Saponara. 2022. "Electro-Thermal Model-Based Design of Bidirectional On-Board Chargers in Hybrid and Full Electric Vehicles" Electronics 11, no. 1: 112. https://doi.org/10.3390/electronics11010112