
Integration of Distributed Energy Resources and EV Fast-Charging Infrastructure in High-Speed Railway Systems

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Principles and Configuration of DC High-Speed Railway Systems
3. Modeling and Integration of RES, Energy Storage System, and EV Fast-Charging Station into DC Catenary System
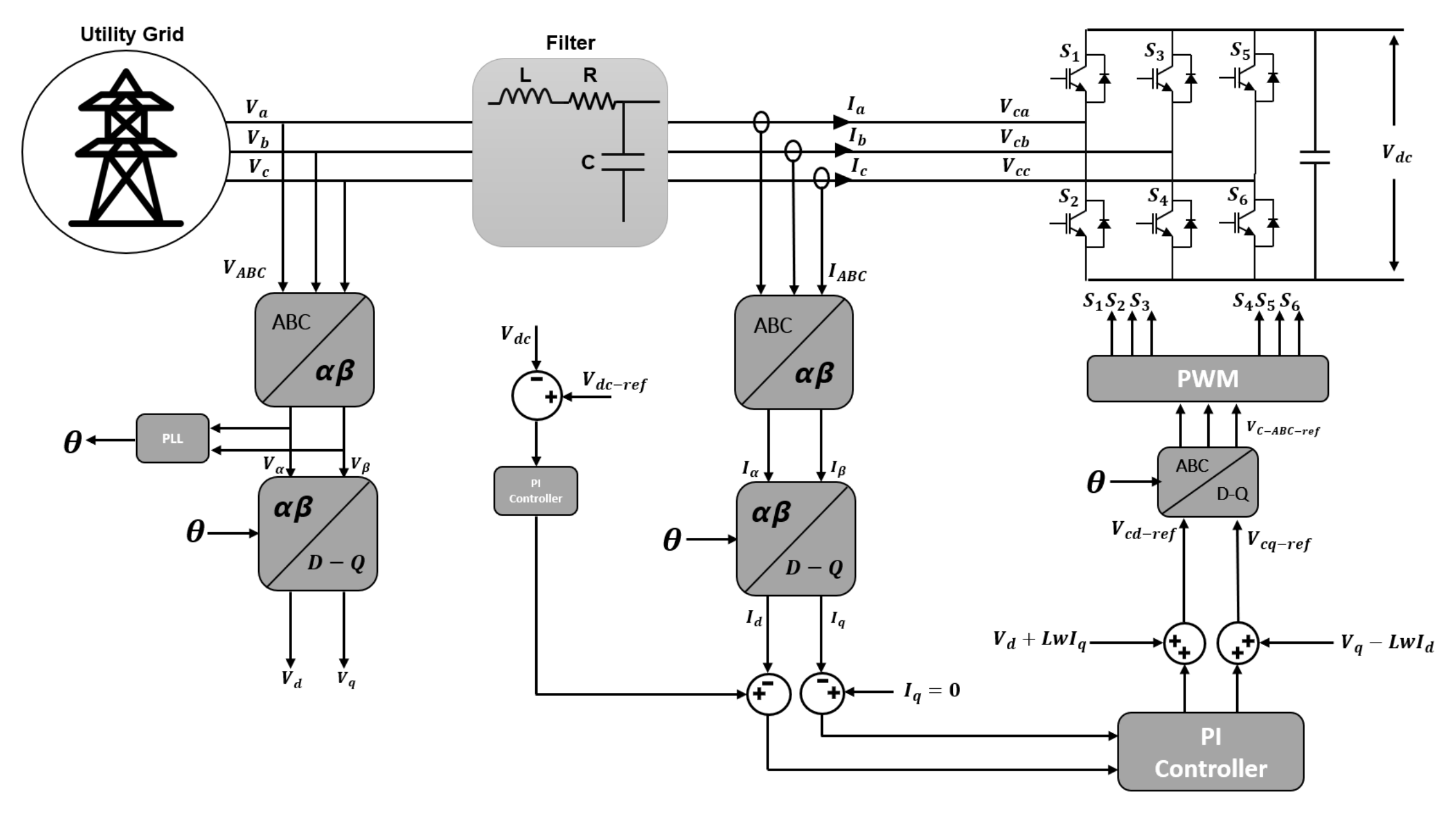
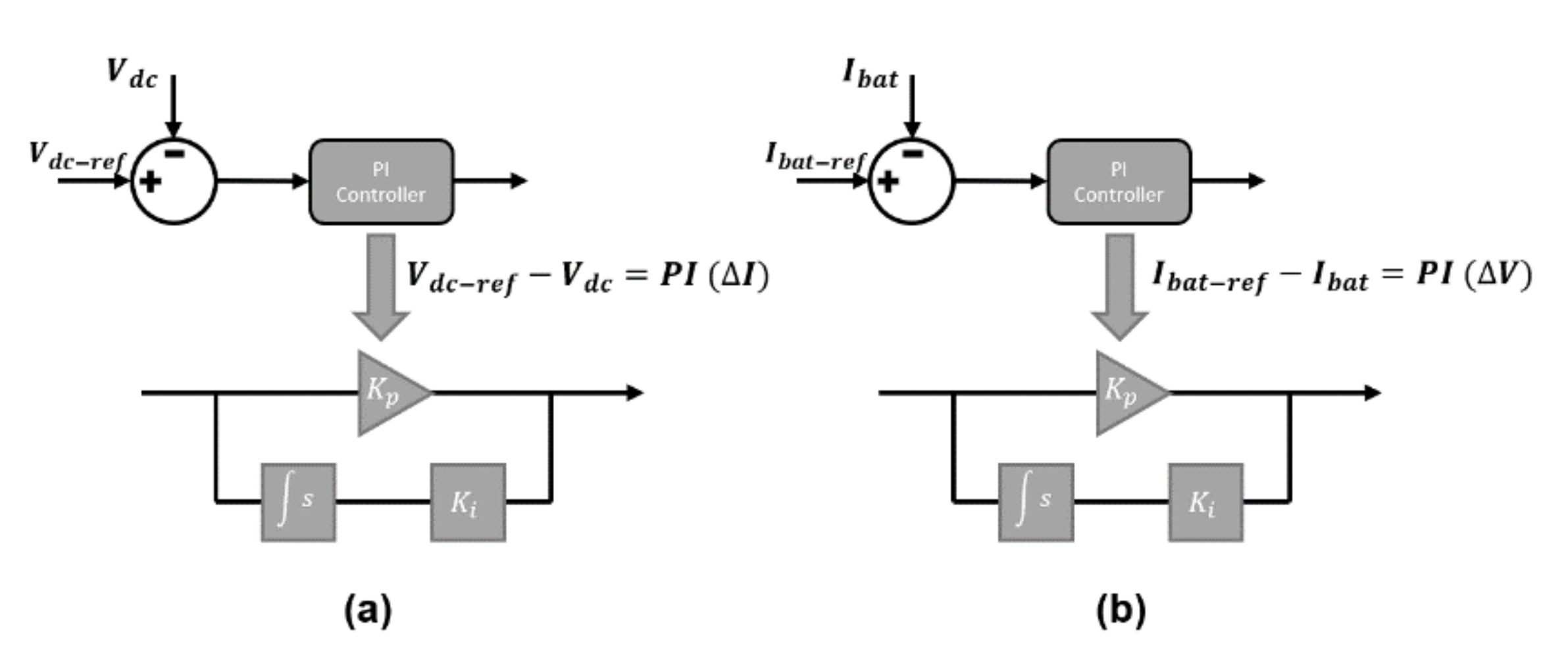
3.1. Grid Connected Converter
3.2. PV
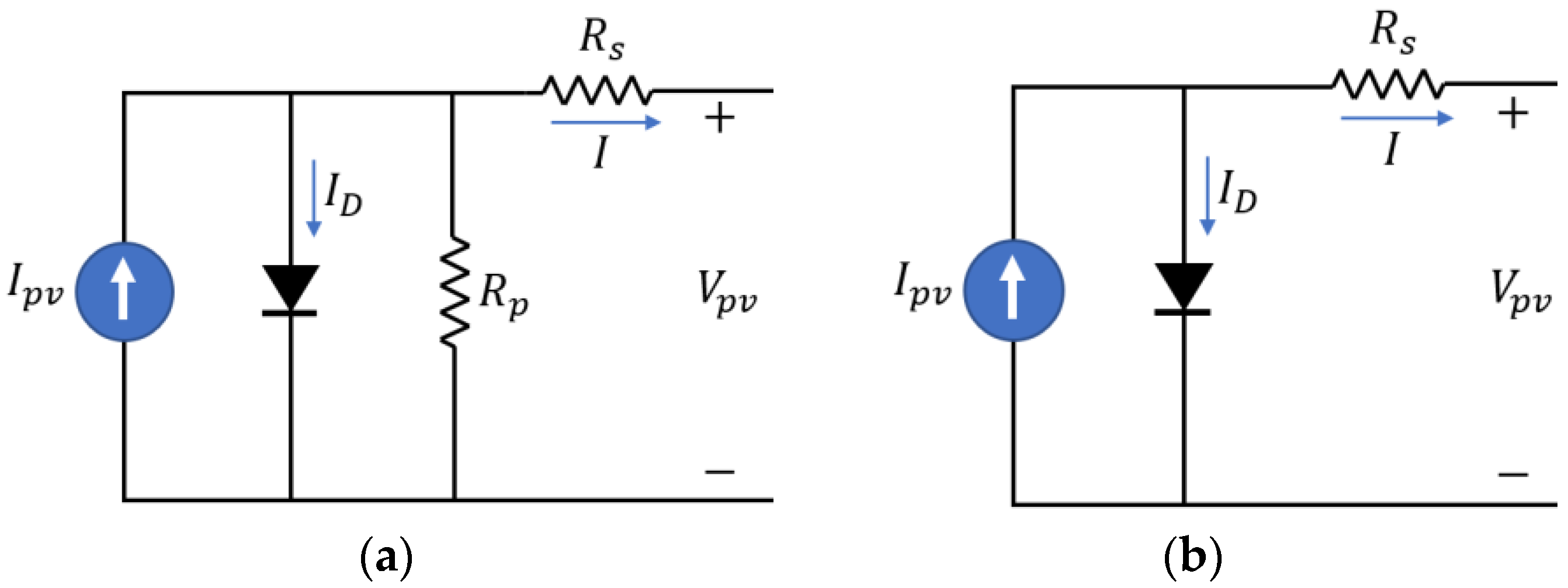
3.2.1. Mathematical Modeling of PV System
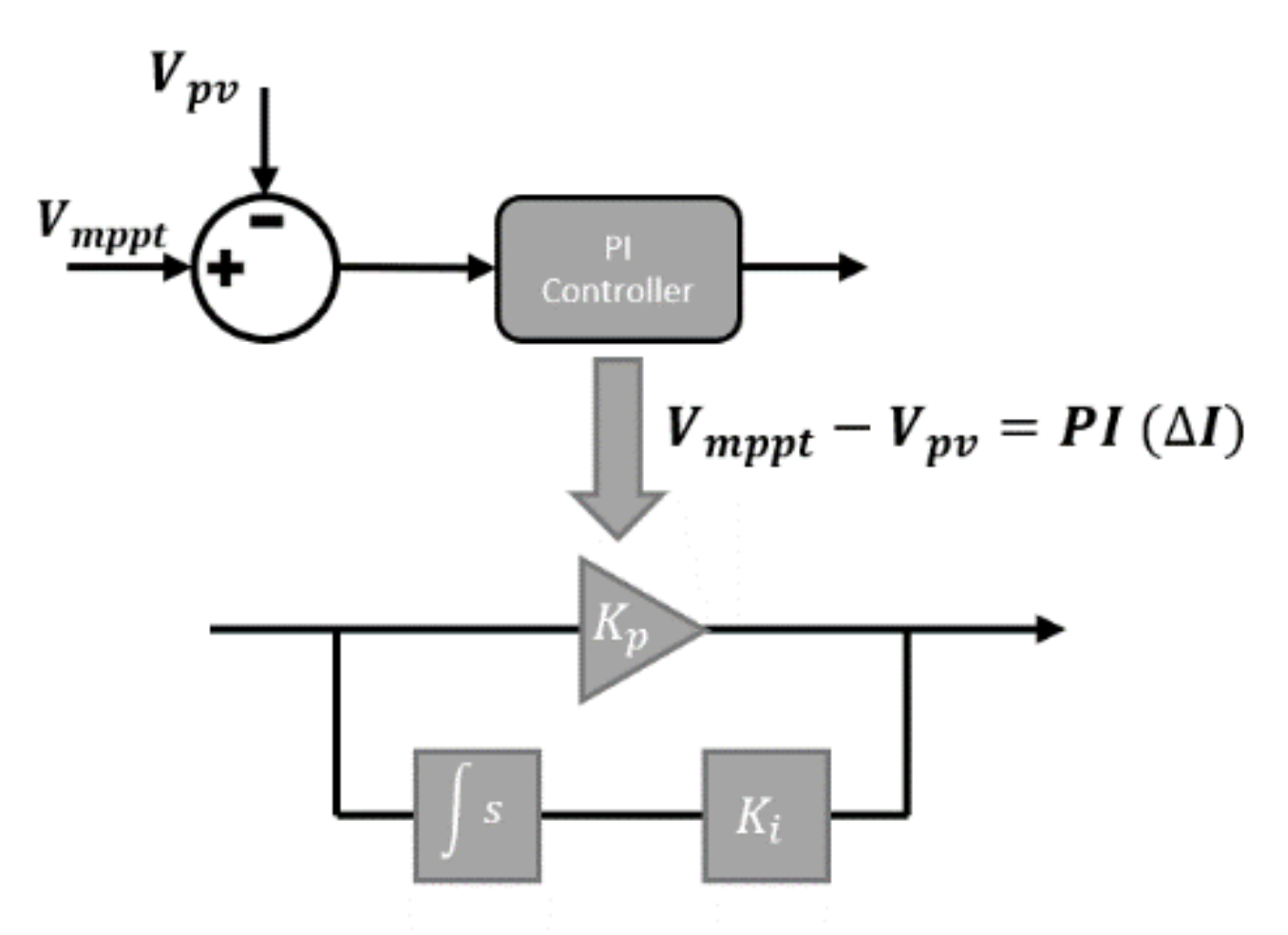
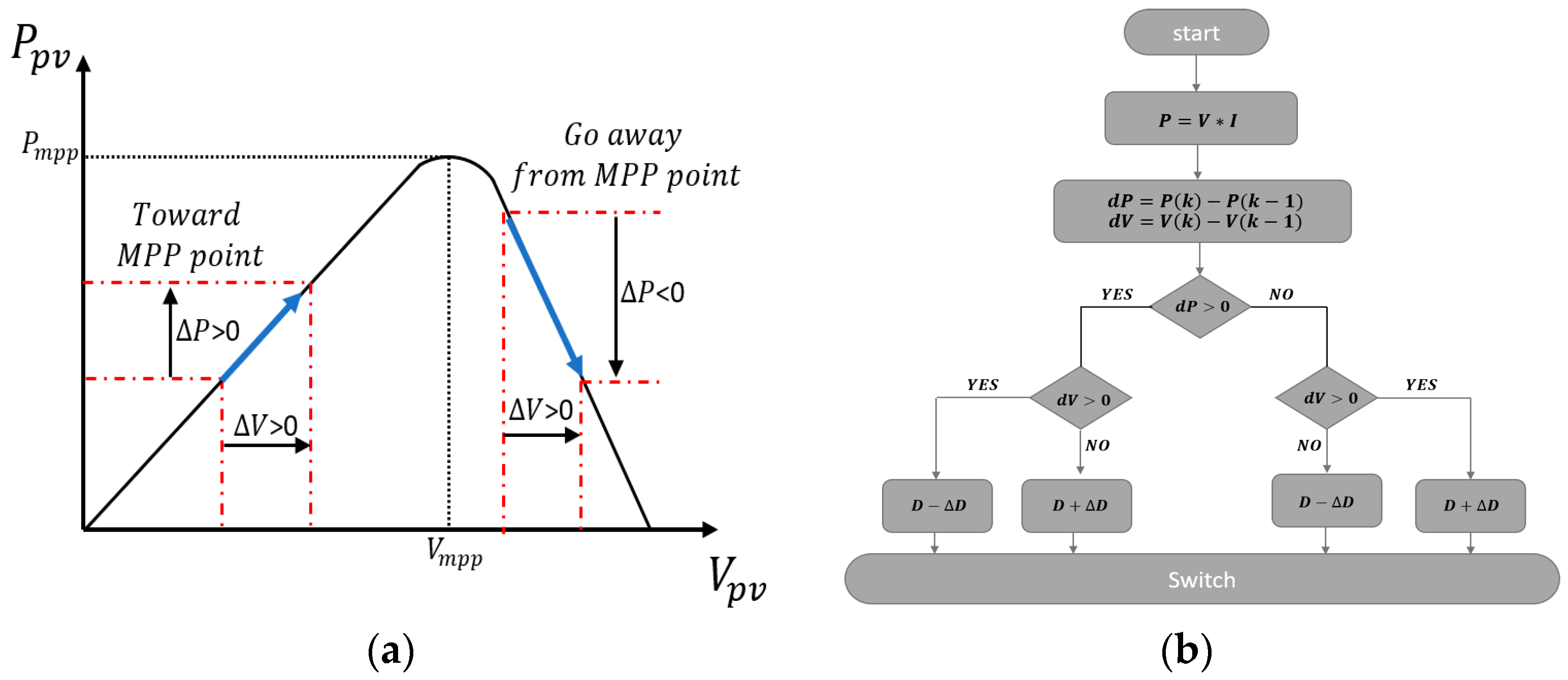
3.2.2. Maximum Power Point Tracking Control
- If , it shows that we are getting close to MPP, so any incrementation in the same direction will shake the operating point unto MPP.
- If , it represents that the operating point pulls away from MPP, hence, the direction of the operating point should be reversed.
3.3. Energy Storage System
- When is ON and is OFF
- When is OFF and is ON
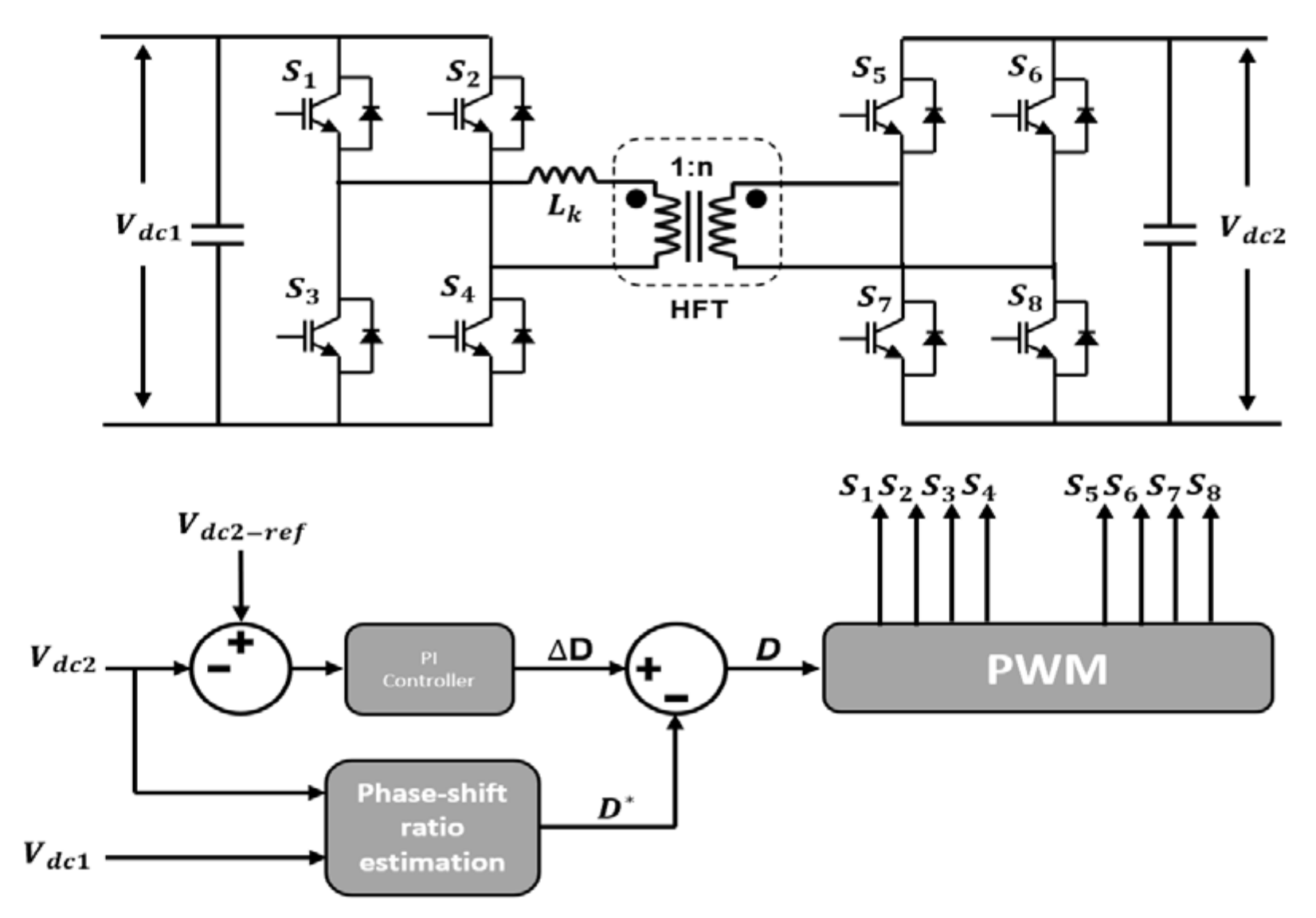
3.4. EV Fast-Charging Station (DAB Converter)
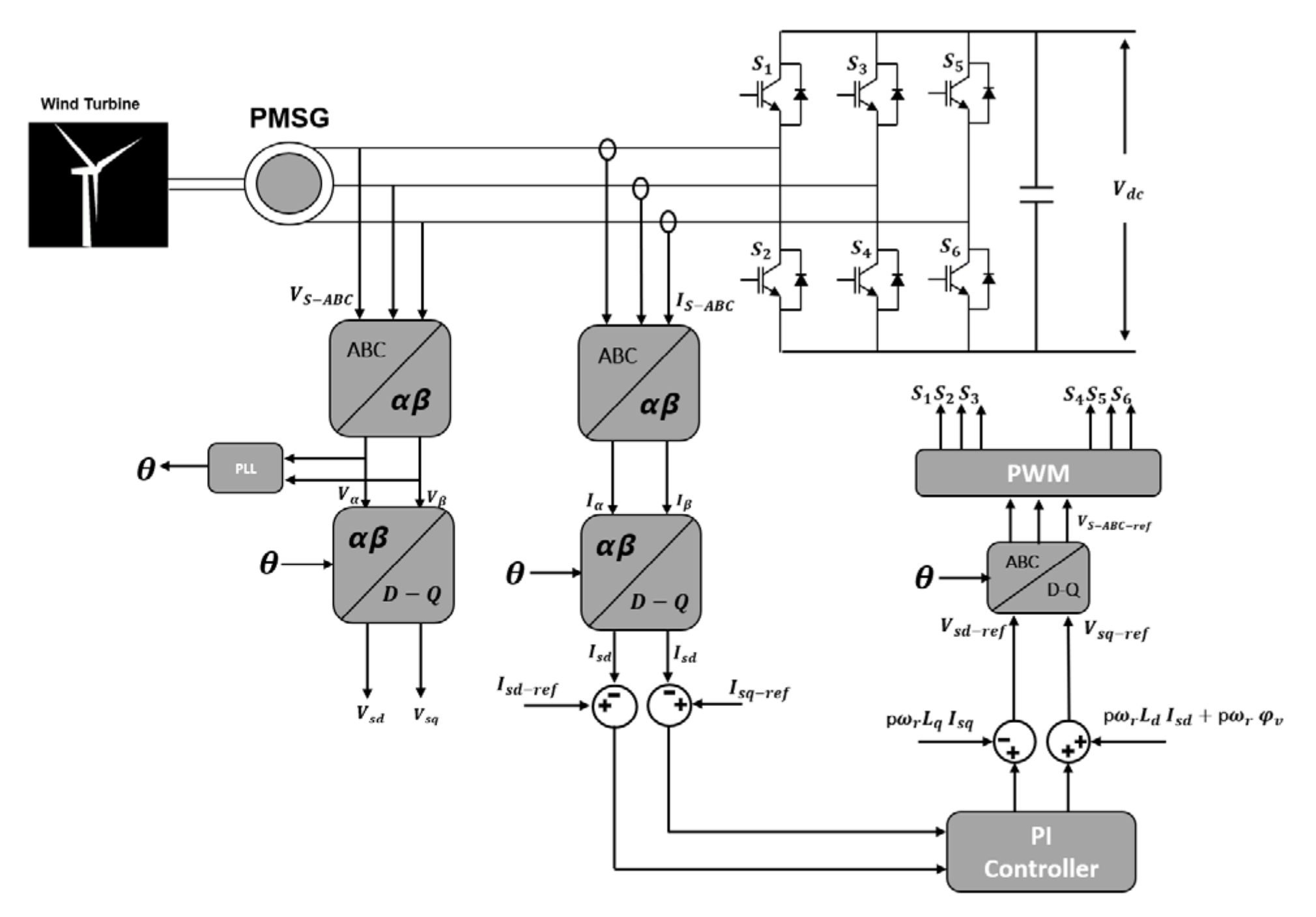
3.5. Wind Turbine System
4. Proposed Power Management System
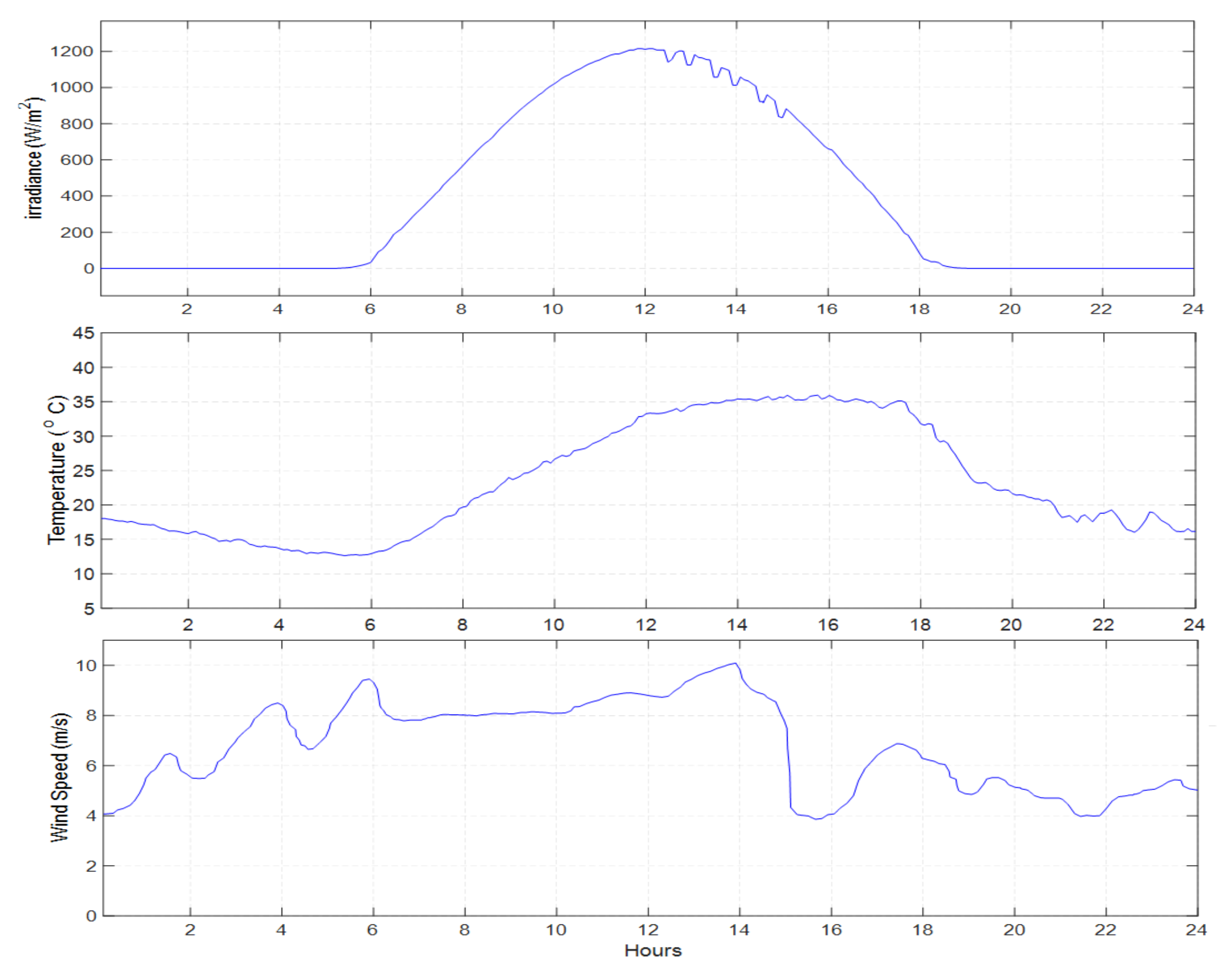
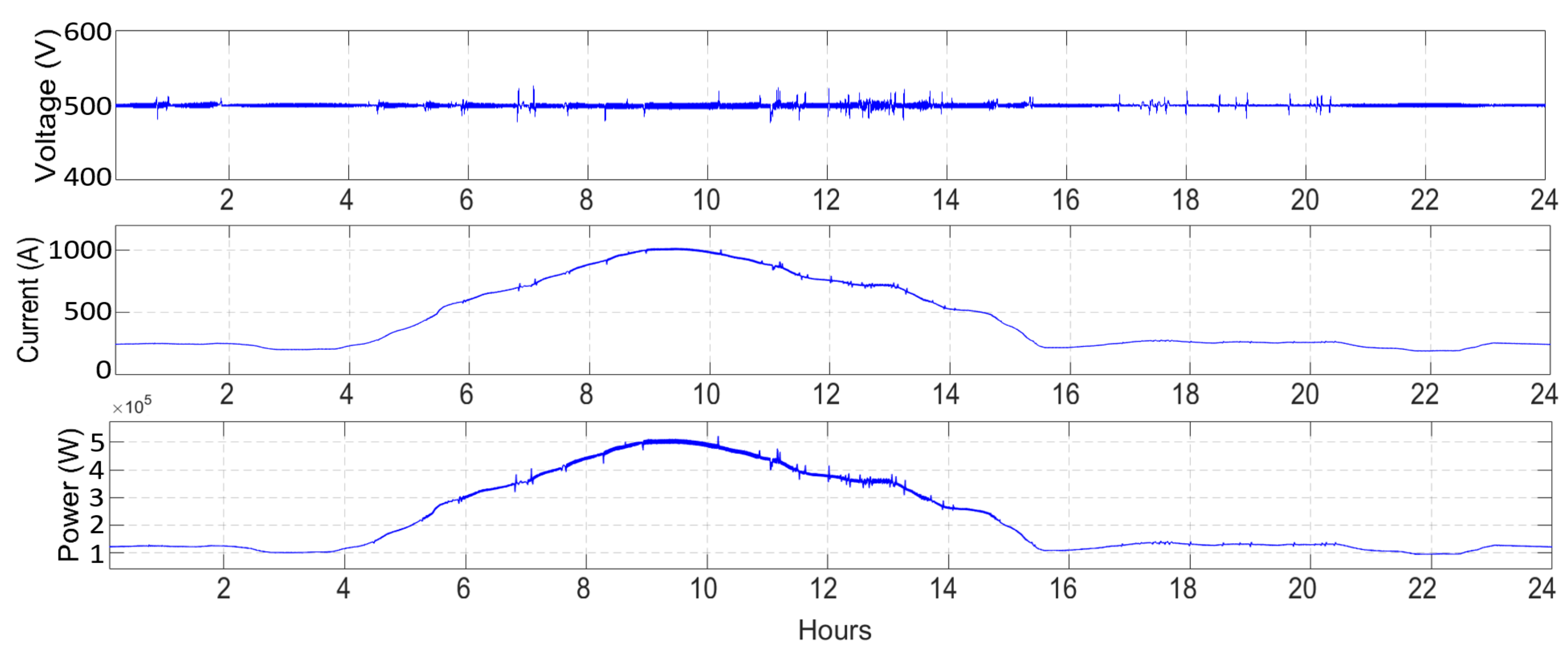
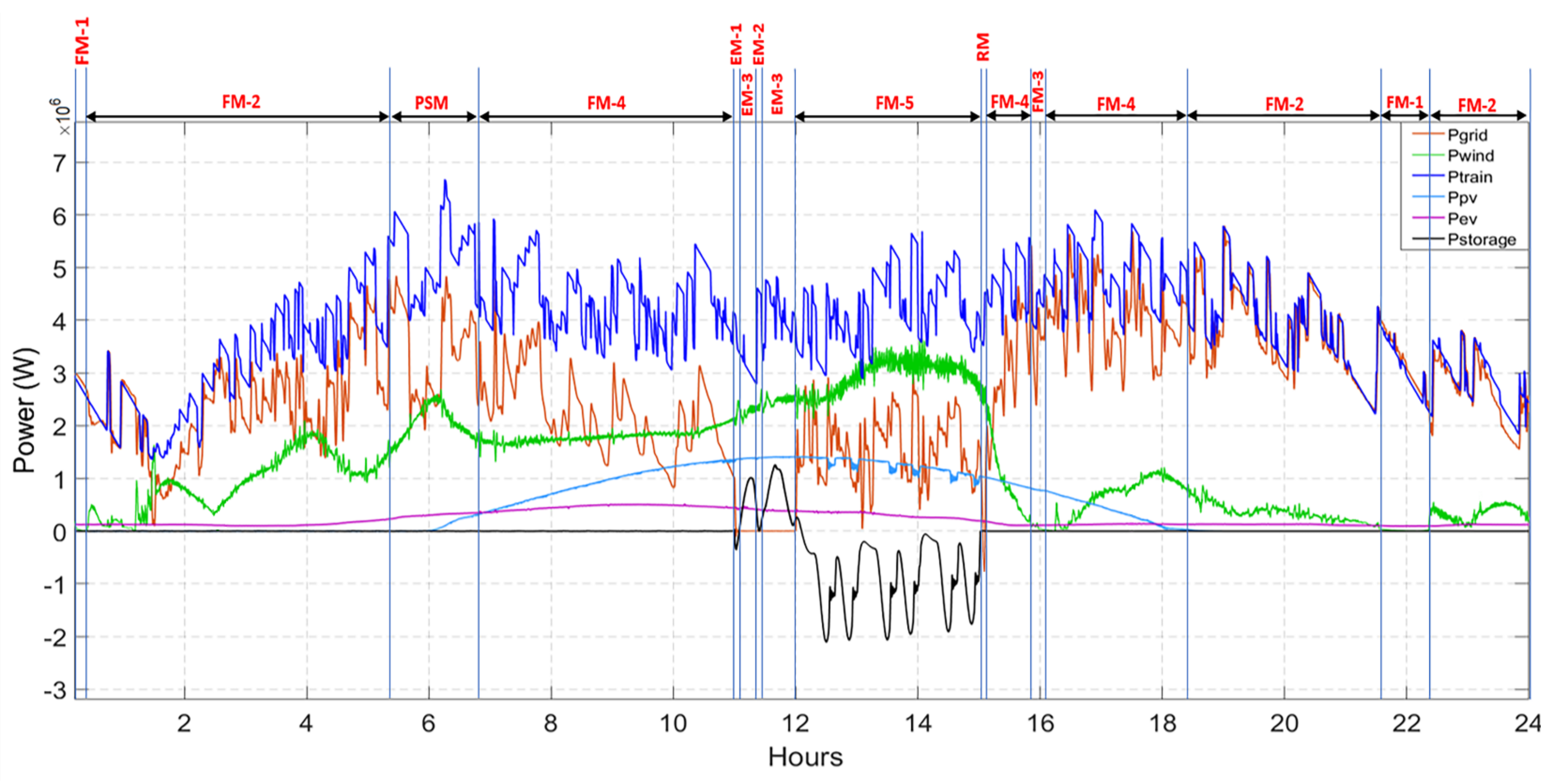
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ciccarelli, F.; Di Noia, L.P.; Rizzo, R. Integration of photovoltaic plants and supercapacitors in tramway power systems. Energies 2018, 11, 410. [Google Scholar] [CrossRef] [Green Version]
- Ratniyomchai, T.; Hillmansen, S.; Tricoli, P. Recent developments and applications of energy storage devices in electrified railways. IET Electr. Syst. Transp. 2014, 4, 9–20. [Google Scholar] [CrossRef]
- Ahmadi, M.; Kaleybar, H.J.; Brenna, M.; Castelli-Dezza, F.; Carmeli, M.S. Adapting digital twin technology in electric railway power systems. In Proceedings of the 12th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tabriz, Iran, 2–4 February 2021. [Google Scholar] [CrossRef]
- Aguado, J.A.; Racero, A.J.S.; De La Torre, S. Optimal operation of electric railways with renewable energy and electric storage systems. IEEE Trans. Smart Grid 2018, 9, 993–1001. [Google Scholar] [CrossRef]
- Savio, D.A.; Juliet, V.A.; Chokkalingam, B.; Padmanaban, S.; Holm-Nielsen, J.B.; Blaabjerg, F. Photovoltaic integrated hybrid microgrid structured electric vehicle charging station and its energy management approach. Energies 2019, 12, 168. [Google Scholar] [CrossRef] [Green Version]
- Trifkovic, M.; Sheikhzadeh, M.; Nigim, K.; Daoutidis, P. Modeling and control of a renewable hybrid energy system with hydrogen storage. IEEE Trans. Control Syst. Technol. 2014, 22, 169–179. [Google Scholar] [CrossRef]
- Brenna, M.; Foiadelli, F.; Kaleybar, H.J. The evolution of railway power supply systems toward smart microgrids: The concept of the energy hub and integration of distributed energy resources. IEEE Electrif. Mag. 2020, 8, 12–23. [Google Scholar] [CrossRef]
- D’Arco, S.; Piegari, L.; Tricoli, P. Comparative analysis of topologies to integrate photovoltaic sources in the feeder stations of AC railways. IEEE Trans. Transp. Electrif. 2018, 4, 951–960. [Google Scholar] [CrossRef] [Green Version]
- Cheng, P.; Wu, C.; Kong, H.; Blaabjerg, F.; Quan, Y. Connection and control strategy of pv converter integrated into railway traction power supply system. Energies 2020, 13, 5989. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, M.; Lu, S.; Chen, Y.; Li, Q. Optimized sizing and scheduling of hybrid energy storage systems for high-speed railway traction substations. Energies 2018, 11, 2199. [Google Scholar] [CrossRef] [Green Version]
- Perez, F.; Iovine, A.; Damm, G.; Galai-Dol, L.; Ribeiro, P.F. Stability analysis of a DC microgrid for a smart railway station integrating renewable sources. IEEE Trans. Control Syst. Technol. 2020, 28, 1802–1816. [Google Scholar] [CrossRef]
- Boudoudouh, S.; Maaroufi, M. Renewable energy sources integration and control in railway microgrid. IEEE Trans. Ind. Appl. 2019, 55, 2045–2052. [Google Scholar] [CrossRef]
- Gómez-expósito, A.; Mauricio, J.M.; Maza-Ortega, J.M. VSC-based MVDC railway electrification system. IEEE Trans. Power Deliv. 2014, 29, 422–431. [Google Scholar] [CrossRef]
- Nehrir, M.H.; Wang, C.; Strunz, K.; Aki, H.; Ramakumar, R.; Bing, J.; Miao, Z.; Salameh, Z. A review of hybrid renewable/alternative energy systems for electric power generation: Configurations, control, and applications. IEEE Trans. Sustain. Energy 2011, 2, 392–403. [Google Scholar] [CrossRef]
- Billinton, R.; Allan, R.N. Reliability Evaluation of Engineering Systems; Plenum Press: New York, NY, USA, 1992; ISBN 9781489906878. [Google Scholar]
- Kaleybar, H.J.; Brenna, M.; Foiadelli, F. Compatibility of Present 3 kV DC and 2× 25 kV AC High-Speed Railway Power Supply Systems Towards Future MVDC System. In Proceedings of the 12th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tabriz, Iran, 2–4 February 2021. [Google Scholar] [CrossRef]
- Mandrioli, R.; Hammami, M.; Viatkin, A.; Barbone, R.; Pontara, D.; Ricco, M. Phase and neutral current ripple analysis in three-phase four-wire split-capacitor grid converter for EV chargers. Electronics 2021, 10, 1016. [Google Scholar] [CrossRef]
- Suthar, M.; Singh, G.K.; Saini, R.P. Comparison of mathematical models of photo-voltaic (PV) module and effect of various parameters on its performance. In Proceedings of the 2013 International Conference on Energy Efficient Technologies for Sustainability ICEETS, Nagercoil, India, 10–12 April 2013; pp. 1354–1359. [Google Scholar] [CrossRef]
- Siddiqui, M.U.; Arif, A.F.M.; Bilton, A.M.; Dubowsky, S.; Elshafei, M. An improved electric circuit model for photovoltaic modules based on sensitivity analysis. Sol. Energy 2013, 90, 29–42. [Google Scholar] [CrossRef]
- Anthony, M.; Prasad, V.; Kannadasan, R.; Mekhilef, S.; Alsharif, M.H.; Kim, M.K.; Jahid, A.; Aly, A.A. Autonomous fuzzy controller design for the utilization of hybrid PV-wind energy resources in demand side management environment. Electronics 2021, 10, 1618. [Google Scholar] [CrossRef]
- Walczak, M.; Bychto, L. Influence of parasitic resistances on the input resistance of buck and boost converters in maximum power point tracking (Mppt) systems. Electronics 2021, 10, 1464. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.A.; Dekkiche, A.I. A generic battery model for the dynamic simulation of hybrid electric vehicles. In Proceedings of the 2007 IEEE Vehicle Power and Propulsion Conference VPPC, Arlington, TX, USA, 9–12 September 2007; pp. 284–289. [Google Scholar] [CrossRef]
- Parthasarathy, C.; Hafezi, H.; Laaksonen, H. Integration and control of lithium-ion BESSs for active network management in smart grids: Sundom smart grid backup feeding case. Electr. Eng. 2021, 1–15. [Google Scholar] [CrossRef]
- Hou, N.; Song, W.; Wu, M. Minimum-current-stress scheme of dual active bridge DC-DC converter with unified phase-shift control. IEEE Trans. Power Electron. 2016, 31, 8552–8561. [Google Scholar] [CrossRef]
- Miranda, L.M.; Varajao, D.; Dos Santos, B.; Araujo, R.E.; Moreira, C.L.; Lopes, J.A.P. Power flow control with bidirectional dual active bridge battery charger in low-voltage microgrids. In Proceedings of the 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013. [Google Scholar] [CrossRef] [Green Version]
- Anzola, J.; Aizpuru, I.; Arruti, A. Partial power processing based converter for electric vehicle fast charging stations. Electronics 2021, 10, 260. [Google Scholar] [CrossRef]
- Skouros, I.; Bampoulas, A.; Karlis, A. A bidirectional dual active bridge converter for V2G applications based on DC microgrid. In Proceedings of the Thirteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 10–12 April 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Hlaing, H.S.; Liu, J.; Bevrani, H.; Ise, T. PMSG control for a stand-alone gas engine generator using active rectifier and VSG-controlled inverter. Energies 2020, 13, 233. [Google Scholar] [CrossRef] [Green Version]
- Roumila, Z.; Rekioua, D.; Rekioua, T. Energy management based fuzzy logic controller of hybrid system wind/photovoltaic/diesel with storage battery. Int. J. Hydrogen Energy 2017, 42, 19525–19535. [Google Scholar] [CrossRef]
- Chouhan, N.S. Doubly fed induction generator with integrated energy storage system for smoothening of output power. Master’s Thesis, Missouri University of Science and Technology, Rolla, MO, USA, September 2010. [Google Scholar]
- Kowsalya, M.; Thamilmaran, A.; Vijayapriya, P. Supervisor control for a stand-alone hybrid generation system. Int. J. Appl. Eng. Res. 2017, 12, 4090–4097. [Google Scholar]
- Merabet, A.; Ahmed, K.T.; Ibrahim, H.; Beguenane, R.; Ghias, A.M.Y.M. Laboratory scale microgrid based wind-PV-battery. IEEE Trans. Sustain. Energy 2017, 8, 145–154. [Google Scholar] [CrossRef]
- Hu, J.; Shan, Y.; Xu, Y.; Guerrero, J.M. A coordinated control of hybrid ac/dc microgrids with PV-wind-battery under variable generation and load conditions. Int. J. Electr. Power Energy Syst. 2019, 104, 583–592. [Google Scholar] [CrossRef] [Green Version]
- Kaleybar, H.J.; Brenna, M.; Foiadelli, F.; Fazel, S.S.; Zaninelli, D. Power quality phenomena in electric railway power supply systems: An exhaustive framework and classification. Energies 2020, 13, 6662. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid | ESS | Prenewables | Working Mode | ||
|---|---|---|---|---|---|
| Supply | disconnected | Ppv = 0, Pwind = 0 | FM-1 | FM | Grid connected |
| Supply | disconnected | Ppv = 0, Pwind > 0 | FM-2 | ||
| Supply | disconnected | Ppv > 0, Pwind = 0 | FM-3 | ||
| Supply | disconnected | Ppv > 0, Pwind > 0 | FM-4 | ||
| Supply | charging | Ppv > 0, Pwind > 0 | FM-5 | ||
| Supply | discharging | Ppv = 0, Pwind > 0 | PSM-1 | PSM | |
| Supply | discharging/disconnected | Ppv > 0, Pwind > 0 | PSM-2 | ||
| Absorb | charging/disconnected | Ppv + Pwind > Pev + PTPSS | RM | ||
| Disconnected | charging | Ppv + Pwind > PTPSS + Pev | EM-1 | EM | Standalone |
| Disconnected | disconnected | Ppv+ Pwind = PTPSS + Pev | EM-2 | ||
| Disconnected | discharging | Ppv+ Pwind < PTPSS + Pev | EM-3 | ||
| Item | Description |
|---|---|
| Photovoltaic Generator | 5700 modules 1Soltech 1STH-215-P with 25 series and 228 parallel, 1.2 MW |
| Wind Generator | PMSG, 3 MW, base speed: 9 m/s |
| Storage Unit | 500 V, 4500 Ah Lithium-Ion, response time: 1 s |
| DC Fast-Charging Station (DAB) | 500 kW rating power, 10 kHz switching Frequency |
| TPSS power converter | 10 MVA, 1400 V AC, 3000 V DC, 50 Hz |
| Item | Filter Value |
|---|---|
| AC side filter values | = = 6.5508 × 10−5 H, C = 2.7067 × 10−4 F |
| Storage buck-boost converter | = 5 × 10−5 H |
| PV boost converter | = 40 × 10−3 H |
| Dual Active Bridge converter | = 1.65 × 10−4 H |
| Item | PI Coefficients |
|---|---|
| AC-DC converter | = 0.25, = 30 |
| Buck-boost converter | = 0.25, = 50, = 0.05, = 10 |
| Boost converter | = 0.001, = 0.01 |
| DAB converter | = 0. 085, = 0.25 |
| Wind turbine converter | = 50, = 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmadi, M.; Jafari Kaleybar, H.; Brenna, M.; Castelli-Dezza, F.; Carmeli, M.S. Integration of Distributed Energy Resources and EV Fast-Charging Infrastructure in High-Speed Railway Systems. Electronics 2021, 10, 2555. https://doi.org/10.3390/electronics10202555
Ahmadi M, Jafari Kaleybar H, Brenna M, Castelli-Dezza F, Carmeli MS. Integration of Distributed Energy Resources and EV Fast-Charging Infrastructure in High-Speed Railway Systems. Electronics. 2021; 10(20):2555. https://doi.org/10.3390/electronics10202555
Chicago/Turabian StyleAhmadi, Miad, Hamed Jafari Kaleybar, Morris Brenna, Francesco Castelli-Dezza, and Maria Stefania Carmeli. 2021. "Integration of Distributed Energy Resources and EV Fast-Charging Infrastructure in High-Speed Railway Systems" Electronics 10, no. 20: 2555. https://doi.org/10.3390/electronics10202555