1. Introduction
Worldwide, the most lethal diseases are associated to heart-related issues—accounting for 31% of deaths. Moreover, 75% of these deaths occur in third-world countries, where the population has limited access to a good health system. According to data from the World Health Organization, approximately 17.9 million deaths occur every year [
1].
In Brazil, according to data from Healthy Ministry, 358 thousand people died in 2017 with cardiovascular diseases (CVDs) as the main cause. This number corresponds to 27% of all deaths that occurred in Brazil in the same period, a number statistically equal to that of the last five years [
2].
Among the existing apparatuses to diagnose CVDs, the electrocardiogram (ECG) stands out, which, among other advantages, is economically viable [
3]. The exam consists of making a graphic or numerical record of the heart’s electrical signals using a device called an electrocardiograph. Through the interpretation of the acquired data, it is possible to early diagnose CVDs.
The electrocardiograph was developed during an important era of the union between engineering and medicine (biomedical engineering)—the 20th century. The ECG is an exam that can be executed in different types of health units, not just in hospitals, and more recently, devices for self-monitoring, such as watches, bracelets, cell phones, among others that can measure heart rate, number of step walks, oximetry, and blood pressure [
4]. Medicine, taking advantage of the new technologies that are being developed, invests in telemedicine and telemonitoring fields, mainly to monitor patients with comorbidities or who are immunosuppressed, thus preventing them from going to health units or helping to choose the best moment to look for help [
5]. In [
4], a new type of dry electrode (capacitive type) is proposed to acquire the ECG signal to be incorporated into shirts, improving the comfort of patients who need constant monitoring compared to current silver wet electrodes. In [
5], the authors present a remote monitoring, diagnosis, and treatment system to increase the effectiveness and efficiency of health professionals, which also suggests treatment and exam interpretations of patients who are distant or in loco.
Many of the developed innovations are continuously being improved, and concerning electrocardiograms, the research is focused on enhancing the signal-to-noise ratio (SNR) and the automated identification of anomalies present in the graphic records [
6].
A common problem observed during the design and development of this equipment is the filtering of noise and disturbances that interfere with bioelectrical signals. Several factors can favor signal distortion, but the most common condition is the electromagnetic interference (EMI) through the electrical power grid, mainly in the cables that connect the patient to the electrocardiogram [
7].
EMI noise can appear in the ECG signals also coming from the patient’s own body, usually generated by medical equipment used for treatment such as the Left Ventricular Assist Device (LVAD). Studies such as [
8] indicate that the electromechanical pumps used in LVADs to assist in pumping blood to the patient’s body cause EMI in ECG signals. The EMI has the fundamental frequency of the pump speed, which may depend on the manufacturer, but they are normally above 40 Hz.
Many algorithms have been proposed over the years for EMI noise suppression in bioelectric signals. Classical techniques were deeply developed during the years 1980 and 1990, as shown in [
7,
9,
10]. These techniques are based on band-pass filters (digital or analog), which can be tuned with different bandwidths. Narrowband filters present issues when subjected to grid frequency variations, but present good noise suppression responses. Broadband filters have a poor response and filtering quality, but do not suffer from variations in the fundamental grid frequency.
Improvements in the classical techniques can be seen in the works presented in [
11,
12,
13,
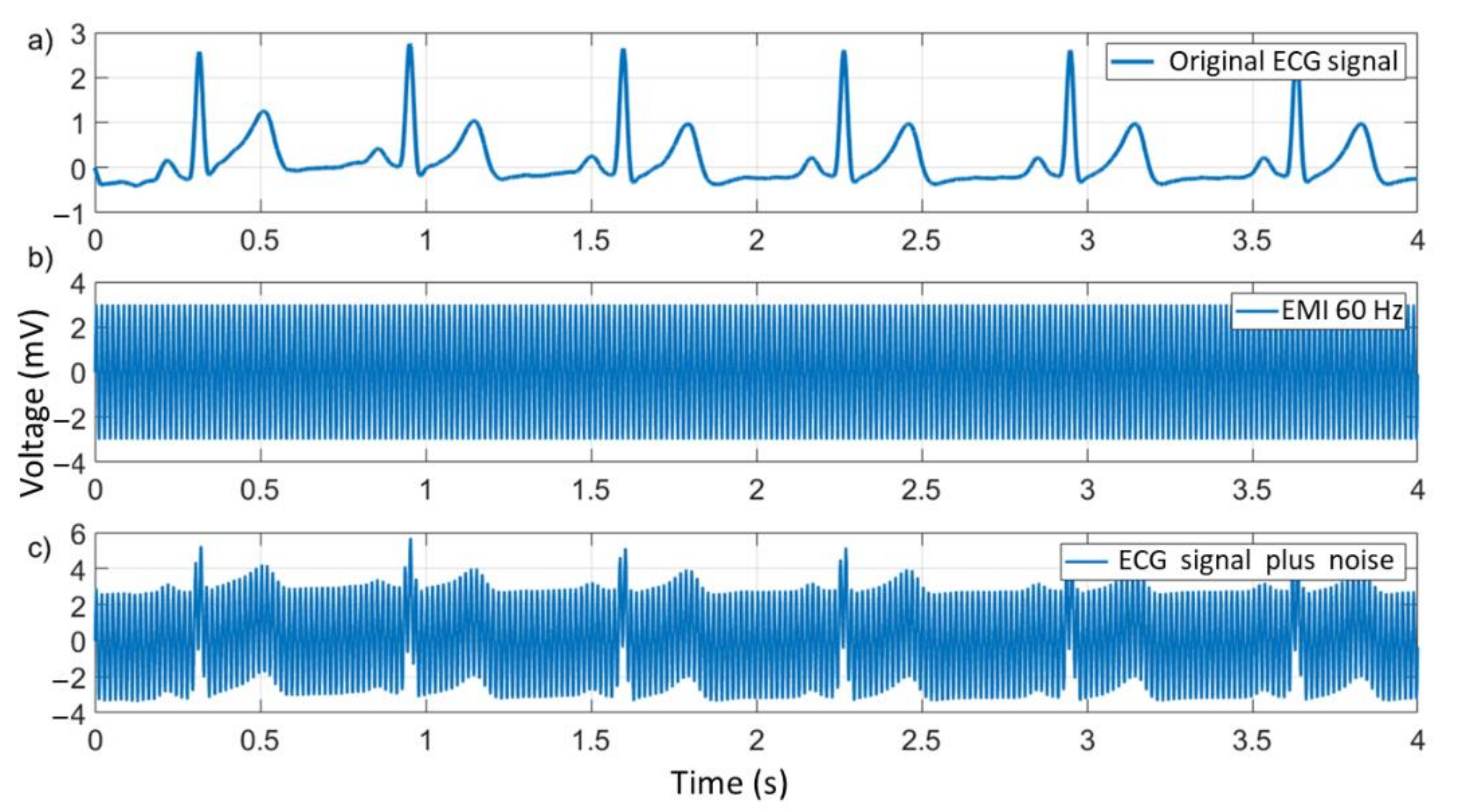
14]. The filtering techniques are tested digitally with ECG signals added to sinusoidal noises at the frequency of the network and with amplitude up to four times greater.
In [
11], a finite impulse response filter (FIR) of the equiripple type is applied. It is improved by hardware simplification with coefficient adjustment to zero (HSSCZ) and hardware simplification by coefficient convergence (HSCC). The combination of these techniques resulted in an SNR attenuation of 13.1 dB with a bandwidth for the cut-off frequency of ±1 Hz in relation to the nominal frequency of the electrical grid. However, this solution is far less than the recommended by the international standard OIML/R-90 of at least 30 dB of SNR in the output signal and 2% variation of the nominal power grid frequency [
15].
In [
12], an algorithm based on the sliding discrete Fourier transform adjusted by a phase-locked-loop (PLL) is proposed, namely the SDFT-PLL algorithm. Noise attenuation was obtained at an SNR of 40 dB at a sampling frequency of 25.6 kHz, which complicates its implementation in technologies with low computational power.
In [
13], a comparison is made among Kalman filter, Least Mean Squares (LMS), Wavelet (UWT), and low-pass type FIR filter. The Kalman filter exhibited the best performance, with an SNR attenuation of 15 dB. However, it presented a reduction in performance against noise frequencies lower than the nominal one.
In [
14], a low-cost equipment was developed, with a simple channel and with a three-way cable for the acquisition of the ECG signal. To eliminate noise, a third-order Butterworth bandpass filter with a 0.5 Hz to 35.0 Hz bandwidth is used. The authors do not present an SNR value for the output signal, but readers can verify in the results the residual noise and attenuation of the R waves.
Moving average filters are found in [
16,
17,
18]. They are tested in ECG signals with fixed frequency noises. The absence of adaptability to noise signals with unstable frequency makes these filters unsuitable for environments with such conditions.
Additionally, conventional notch filters are commonly applied to reject the power line interference (50/60 Hz and harmonics) [
8]. However, conventional notch filters have fixed parameters considering that the frequencies to be rejected have fixes values. Therefore, a variation in the AC fundamental frequency reduces the capability of the notch filter to reject the power line interference. Thus, an adaptive filtering process defined by the measurement of the interference frequency would be suitable for the rejection of interferences that may affect an ECG.
In this context, the purpose of this work is to develop a new algorithm capable of eliminating the electromagnetic interference of ECG signals—the main cause of noise in exams [
11]—through a variable order adaptive moving average filter tuned through the frequency of the noise provided with a moving average PLL for changing the number of samples [
19]. It is imperative that the ECG signal maintains adequate signal/noise attenuation independent of variations in the amplitude or frequency of the noise. Even in extreme situations, when only two electrodes are used to read the ECG signal (differential mode), dispensing the use of the right leg electrode (reference). The algorithm must present an adequate response and the complete system must be low cost.
The proposed system has numerous advantages. The filter performance is not affected by the noise amplitude as it only depends on the frequency of the EMI noise and shows a good rejection response for the EMI harmonic content. Additionally, it is easy to modify the filter’s fundamental frequency by tuning the values of the sampling frequency. It is also worth mentioning that the number of samples (N) is updated at each iteration considering the EMI noise frequency to properly adapt the moving average filter. Conversely, as disadvantages, we may verify a cutting of 10% in the R-wave amplitude and a signal delay of 9.98 ms. However, these are minor drawbacks as they are within the standards.
2. Electrocardiogram Background
Anatomically, the cardiac muscle resembles a set of hydraulic pumps that are driven by electrical impulses and operate in a pulsatile manner, with four stages and two times. The chambers of blood are called atria (brush pumps), one being right (AD) and one left (AE), and the exit chambers (pumps) are called ventricles, one being right (RV) and one left (VE) [
20].
Some heart structures are self-excitable, that is, they have an automatic electrical discharge process that regulates the rhythm of the heart’s beats per minute (BPM). These form the specialized conductive system. The sinus or sinoatrial node (SA) has a self-excitation frequency of 70 BPM and is the heart’s natural pacemaker. The energy generated at the SA node is conducted through the internodal pathways to the atrioventricular (AV) node, a secondary pacemaker, with a self-excitation frequency of 60 BPM (at this moment the signal is delayed until the atria complete their contraction). The AV node forwards the electrical impulse to the bundle of His or AV bundle that distributes the impulse between the right and left branches until it reaches the bundle of Purkinje fibers [
21].
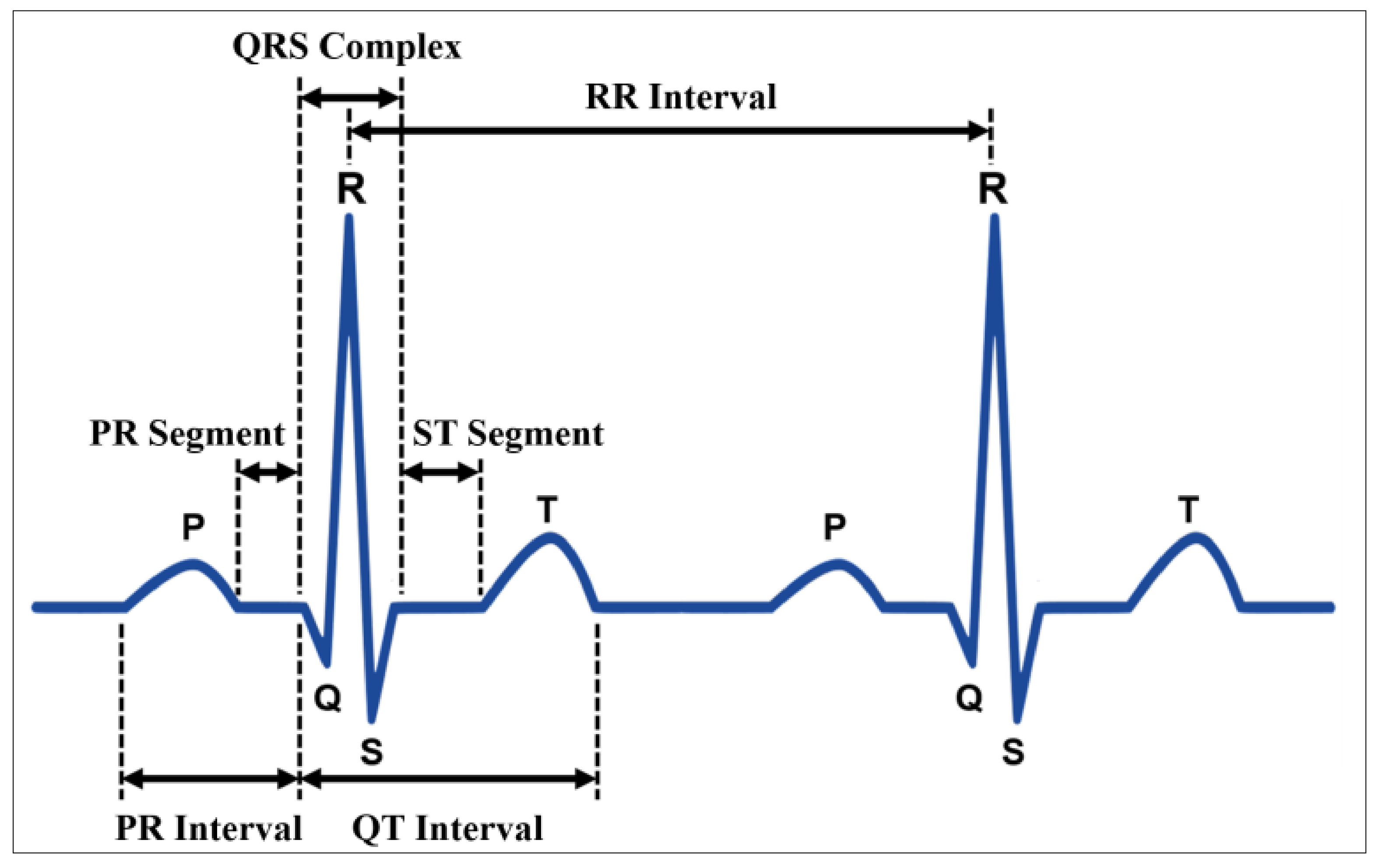
The electrocardiogram or electrocardiography is the record of the heart’s electrical activity and one of the equipment used to perform this record is the electrocardiograph. The recording of the electrical activities signals of the heart corresponds to the QRS complex, shown in
Figure 1.
The P wave corresponds to the depolarization of the atria (muscle contraction moment), the depolarization of the ventricles is represented by the waves Q, R, and S while the T wave corresponds to repolarization (muscle relaxation). Atrial repolarization occurs simultaneously with ventricular depolarization, which hides the signal, as the atrial electrical potential is less than the ventricular one [
20].
For the registration of the QRS complex, two planes of the human body are defined, the frontal or vertical plane, where are the bipolar (DI, DII, and DIII) and unipolar (aVR, aVL, and aVF) leads and the transversal or horizontal plane, where the precordial unipolar leads are (V1, V2, V3, V4, V5, and V6) [
16]. The mathematical relationship between the electrical signals of each lead can be seen in
Table 1 [
20].
The normal ECG signal can be characterized as a quasi-periodic deterministic stationary signal; that is, a sum of several periodic signals with defined frequencies, considering a finite period of time.
The typical amplitude of the ECG signal varies according to the derivation under analysis and the position where the signal is captured. Usually, in the thorax, the maximum amplitude of the signal from the R wave peak to the valley of the S wave, in the DII derivation, is 5.0 mV, while in the limbs, the signal is 1.5 mV [
20].
The most common reading frequency of the ECG signal is between direct current (0 Hz) and 150 Hz, depending on the analyzed wave. The P and T waves have a frequency spectrum between 0.05 Hz and 0.5 Hz, and the Q, R, and S waves are in the frequency spectrum of approximately 10 Hz. This for a heart rate of approximately 60 BPM. Knowing that the heart rate can vary from 40 BPM to more than four times this value, the frequency spectrum of the QRS complex will also increase [
11,
22,
23]. Thus, the algorithm proposed in this work will operate with a bandwidth of DC up to 360 Hz to cover a wide possible range of ECGs.
3. Methodology
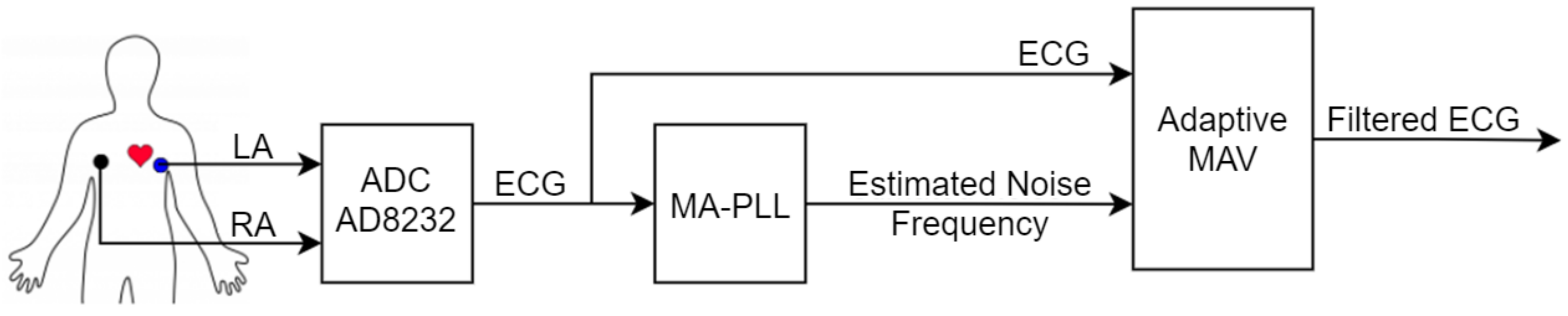
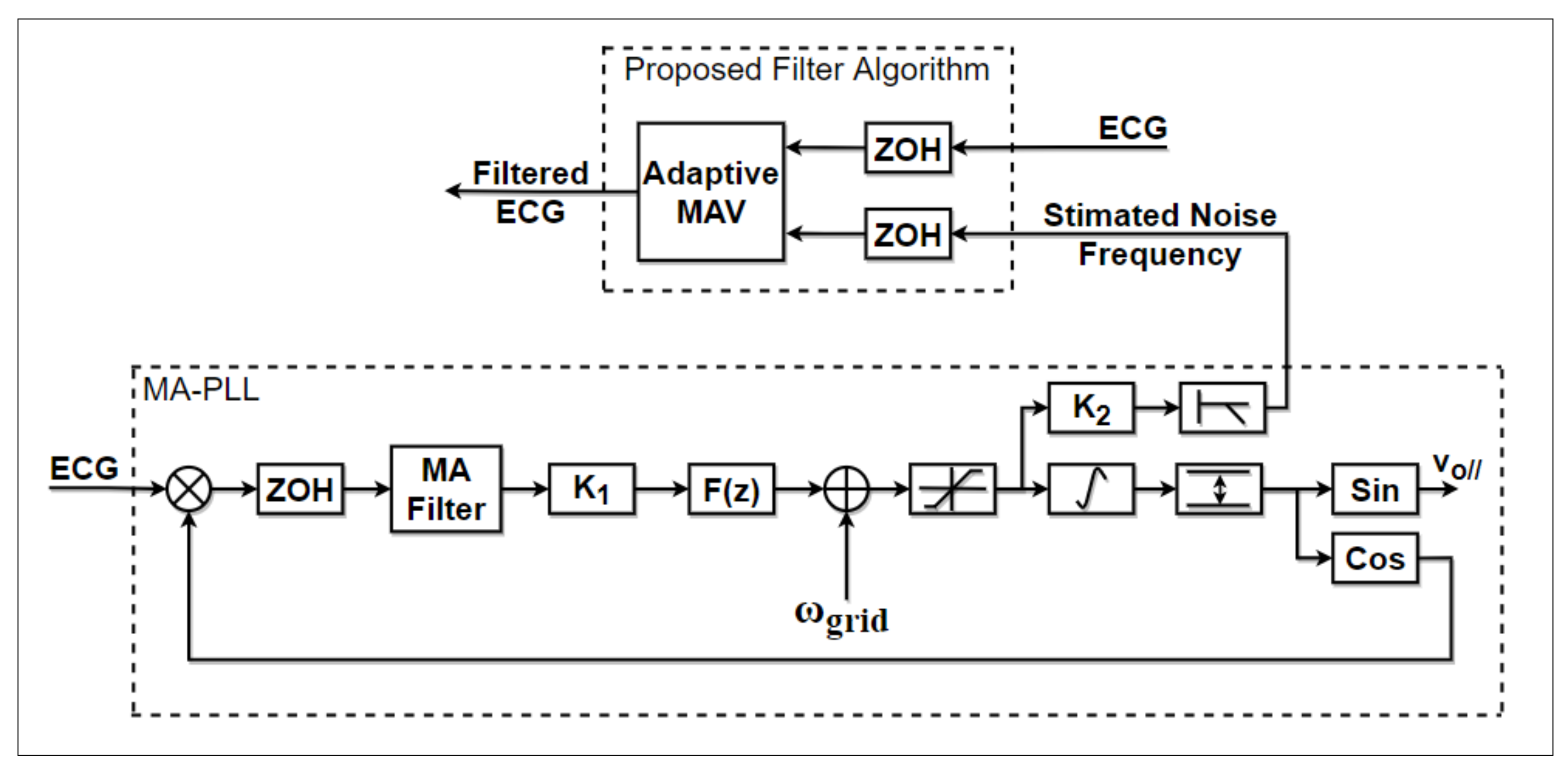
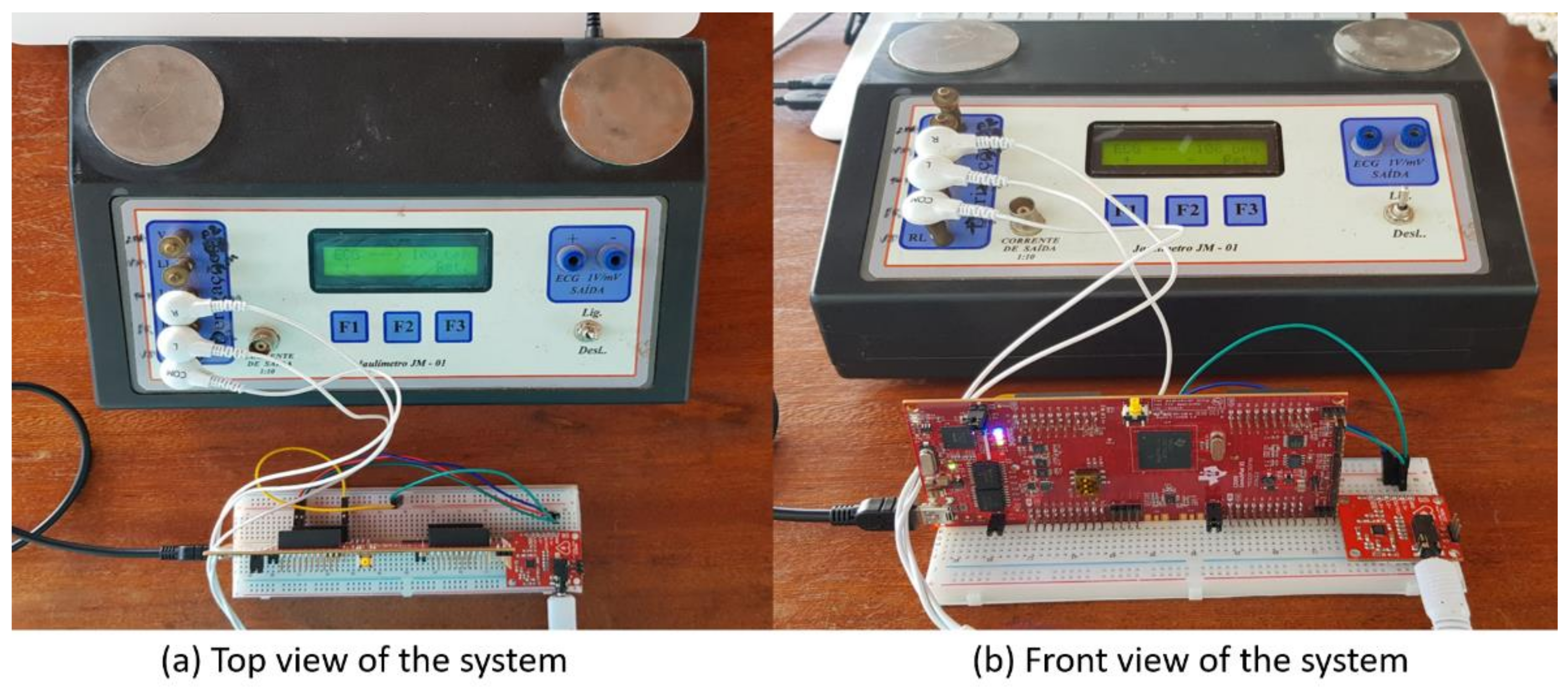
Figure 2 presents the simplified block diagram of the proposed method for the acquisition and filtering of bioelectric signals obtained using only two electrodes. As proposed in [
24], the usage of only two electrodes provides many economic advantages, and this method can be applied to ECG equipment for constant monitoring within hospitals, as well as in wearable devices.
In [
24], a non-differential analog circuit for the acquisition of the ECG signal with a CMRR of 80 dB is proposed, but for this study, the IC AD8232 was used, which has the same CMRR of 80 dB (at frequencies up to 60 Hz) and can be configured for use with or without the right leg electrode. It is not covered in [
24]’s filtering or post-processing methods.
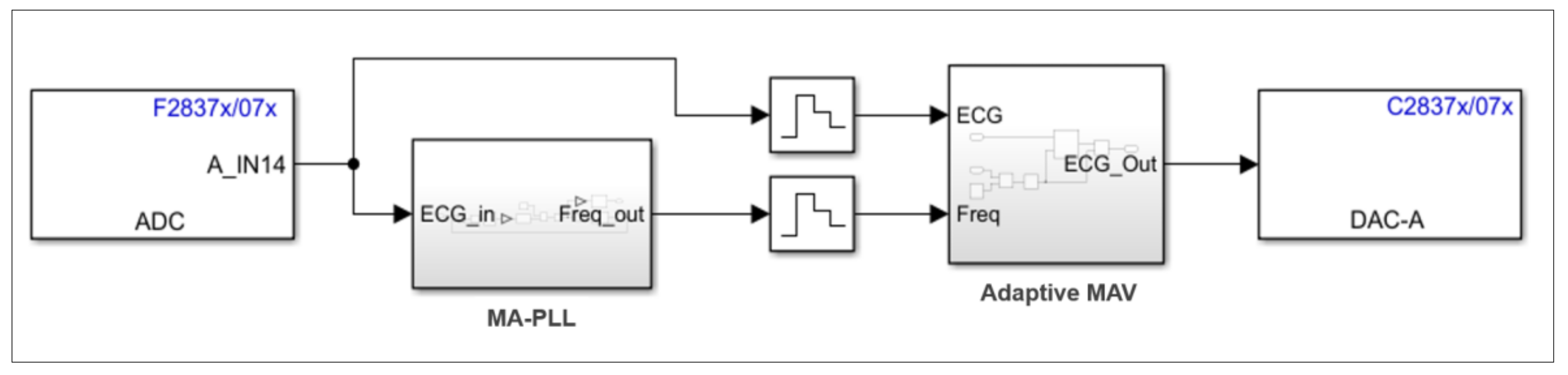
The MA-PLL block of
Figure 2 receives the ECG signal as input and, as there is no need to reconstruct the signal for the proposed filter, this block just outputs the estimated noise frequency.
The proposed algorithm is found in the adaptive MAV block, which has as inputs the ECG signals and the estimated noise frequency. The inputs determine the adaptive MAV filter order and produce the filtered ECG signal as output.
3.1. Phase-Locked-Loop (PLL)
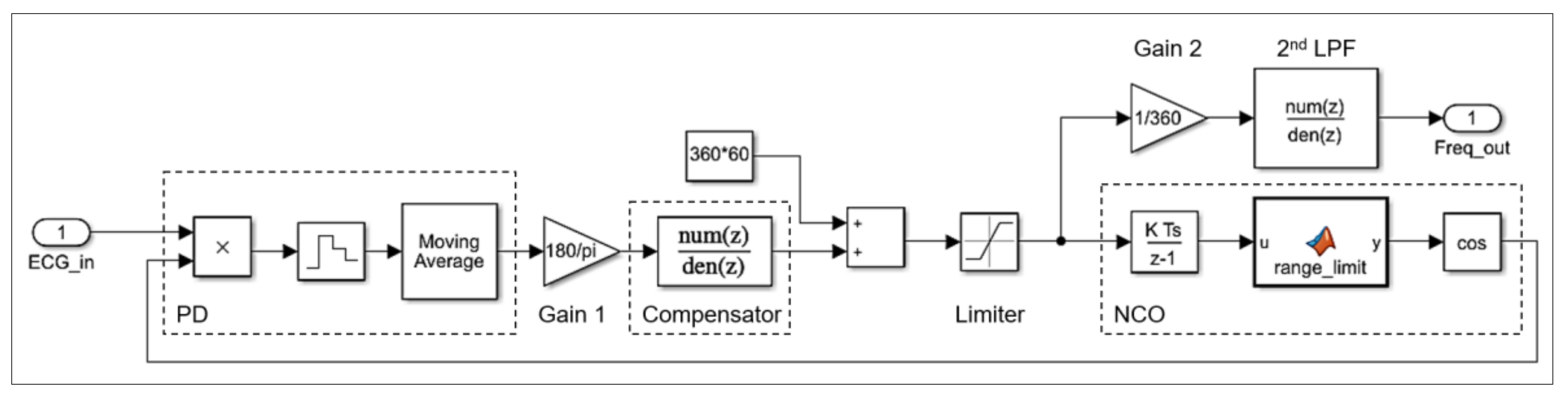
The PLL is a subblock of the proposed system, and it is derived based on [
25]. It is designed with a non-adaptive moving average filter (MA-PLL), as shown in
Figure 3. The MA-PLL was chosen as it has a low computational cost and good frequency response, even in presence of oscillation in the EMI amplitude. In addition, the signal amplitude is not required, as it is desired to eliminate the entire EMI noise.
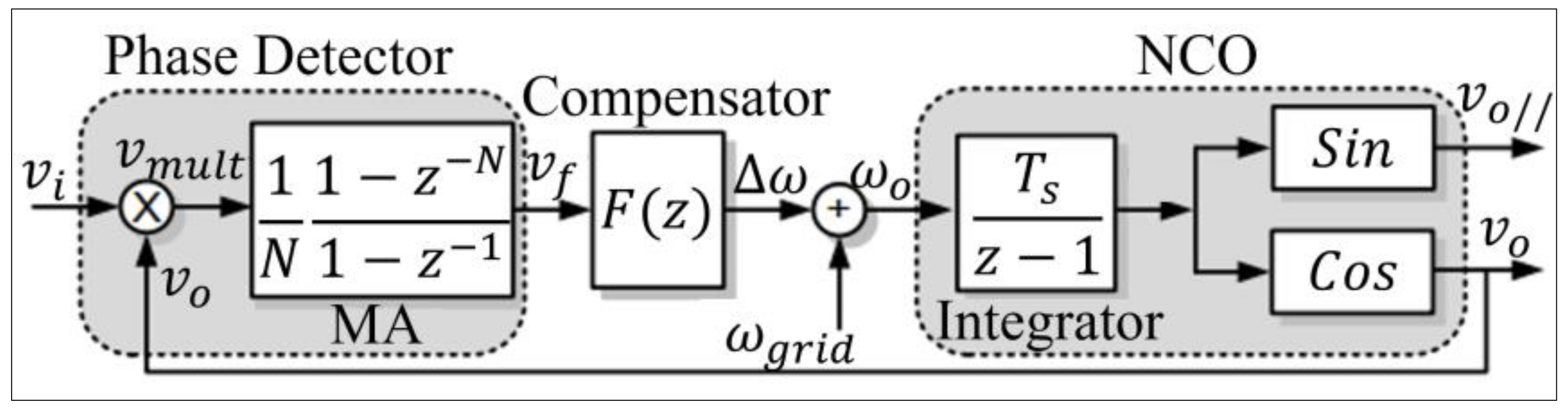
To find the PLL parameters, it was linearized following the same procedure presented in [
25], obtaining the structure in the discrete domain depicted in
Figure 4.
3.1.1. Phase Detector (PD)
The PD receives two inputs, the ECG signal (v
i) and the error signal (v
o cosine feedback). The corresponding output resulting from the comparison between these two inputs is Φ
d, which is a linearization of the sinusoidal signal to small angles, according to Equations (1) and (2):
The output signal
vmult is composed of the signal Φ
d multiplied by a gain added to a high frequency component (
n), which represents a disturbance applied to the system:
A low-pass filter of the moving average (
MA) type is used to eliminate the high-frequency noise from the PD phase, thus eliminating the
n component of the
vmult signal. The transfer function in the
z domain is defined in Equation (4), where
N is the filter order, defined according to the desired cut-off frequency (
fc) and the sampling frequency (
fa), presented in Equation (5):
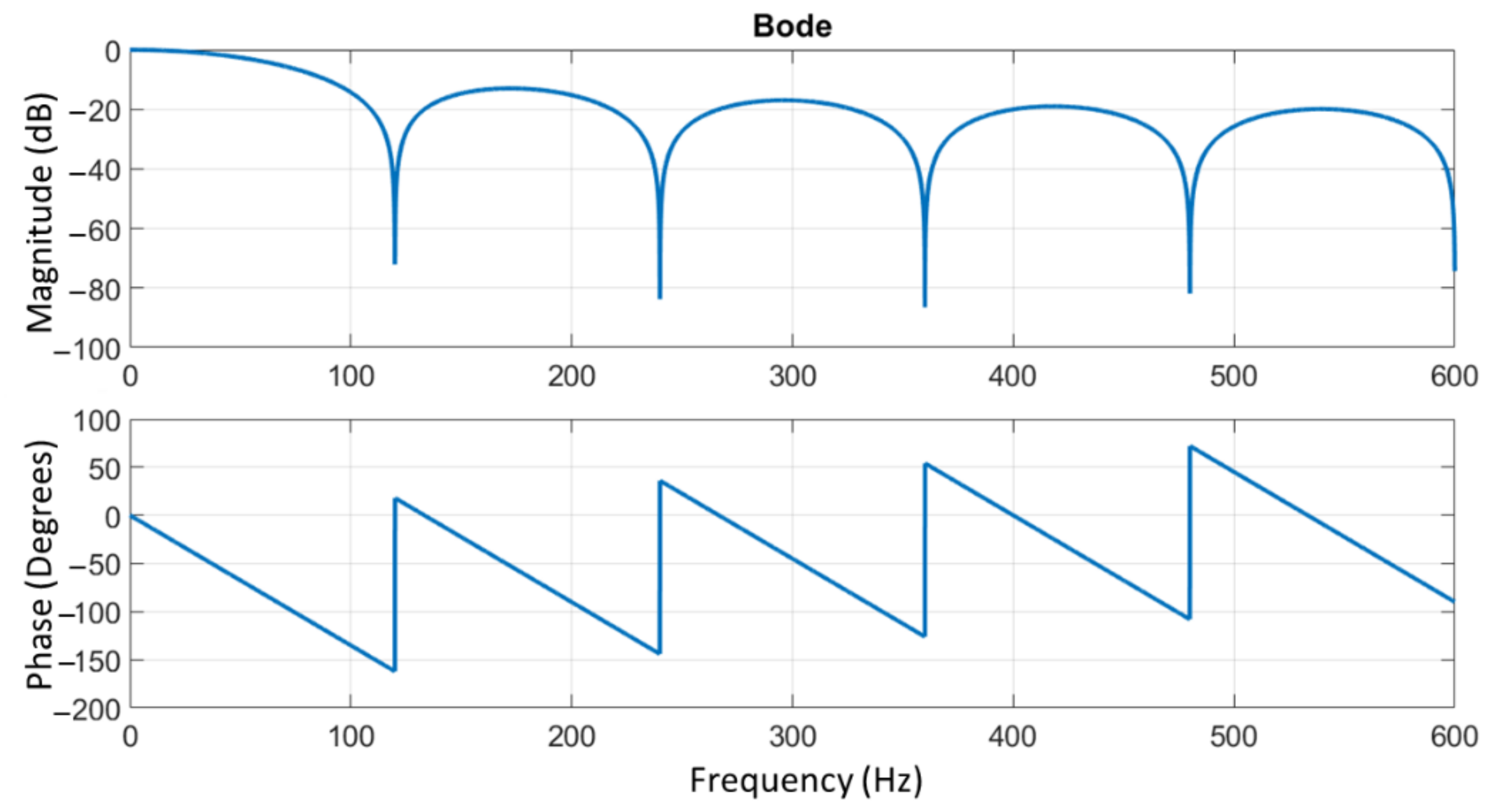
The sampling frequency is 1200 Hz, and the cut-off frequency is 120 Hz, eliminating all noise from the second harmonic of the fundamental frequency (60 Hz). The window size
N is then fixed at 10 samples.
Figure 5 shows the
MA filter’s magnitude and phase response.
3.1.2. Compensator
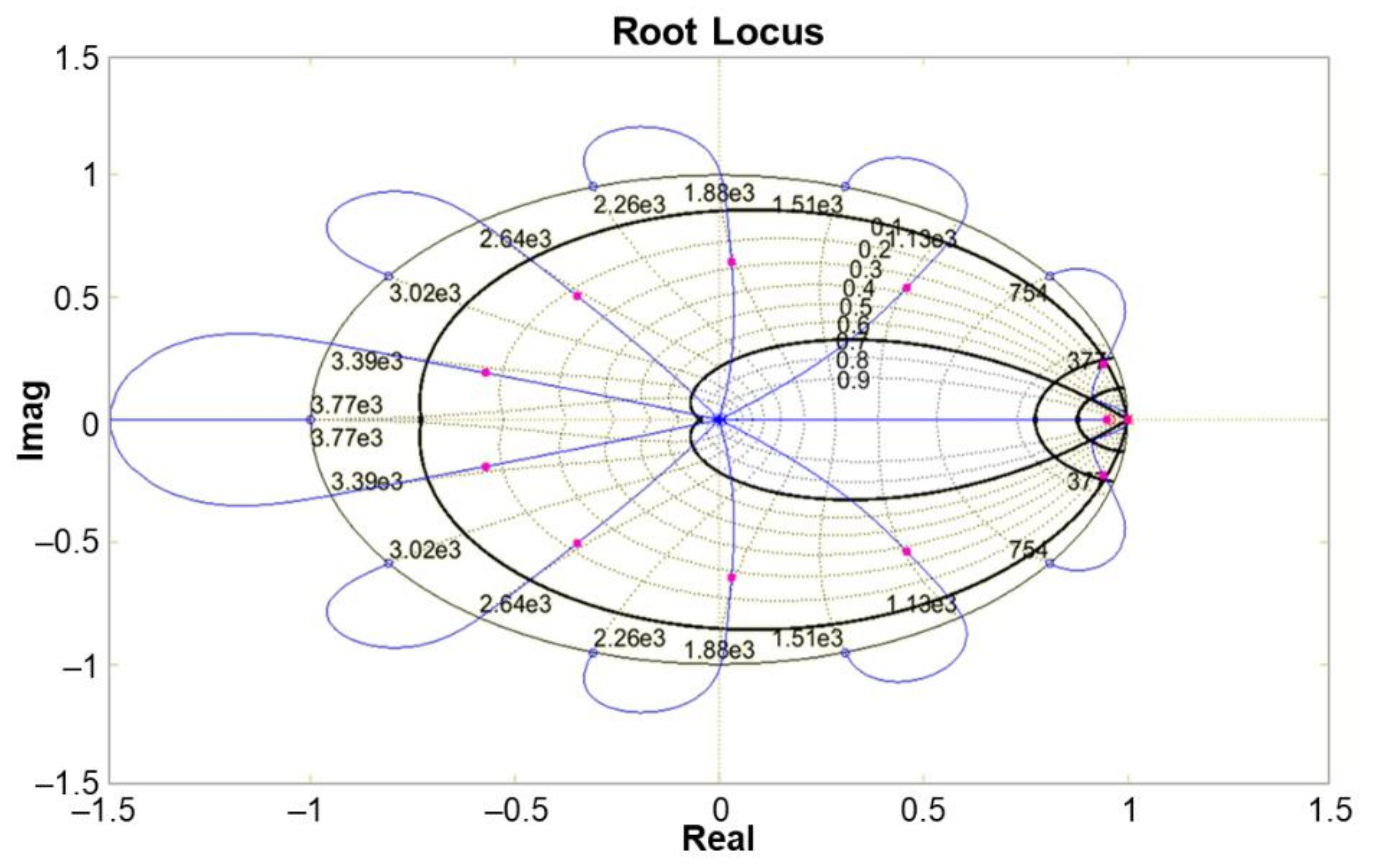
The compensator is a proportional plus integral controller (
PI). It is tuned with the root locus technique. Through approximations of second-order system specifications, based on the desired settling time (
ts), the limits of the damping coefficient (
ζ) and the undamped natural frequency (ω
n) are defined according to Equations (6) and (7), respectively. Equation (8) demonstrates a standard discrete PI controller, where
Kp is the proportional gain and
Ki is the integral gain. Equations (6)–(8) are calculated as follows:
Equation (8) was rewritten as Equation (9) to facilitate the use of the root locus method. Equations (10) and (11) represent the gain (
K) and the zero (
α) of the transfer function:
Figure 6 depicts the PLL roots location, where the damping coefficient lines (0.1 and 0.7) and the natural frequencies (25 Hz and 45 Hz) are highlighted. The region where the roots of the controller must be located is delimited in yellow and the two magenta dots within this area are the roots of the controller. Thus, the adopted values for α and K were 955.74 × 10
−3 (0.9557437866536668) and 3.19 × 10
2 (319.1934263090495), respectively. Those values are the results given by the software used to analyze and tune the controller, without eliminating decimal fractional digits. However, those numbers are difficult to implement in a 32-bit microcontroller. Simulations and experimental tests were performed to reduce the number of these digits without affecting the controller performance. Thus, the aforementioned tests allow for defining the minimal numerical resolution for those parameters:
- -
The parameter K requires, at least, two decimal fractional digits (K = 319.19).
- -
The parameter α requires, at least, six decimal fractional digits (α = 0.955744).
These new values of α and K can be easily implemented in the 32-bit digital processor used in this work.
On the other hand, ω and ζ with poor dimensioned values can lead to a slow response system, unable to track the grid frequency and/or the saturation of the controller outputs. Both cases can cause PLL instability.
3.1.3. Numerically Controlled Oscillator
The numerically controlled oscillator (NCO) is composed of a digital integrator, a sine, and a cosine, as seen in
Figure 3. After the MA-PLL linearization, only the integrator is present, as the values of sine and cosine are approximated as previously addressed. Equation (12) presents the Forward Euler type digital integrator, where
Ts is the sampling period:
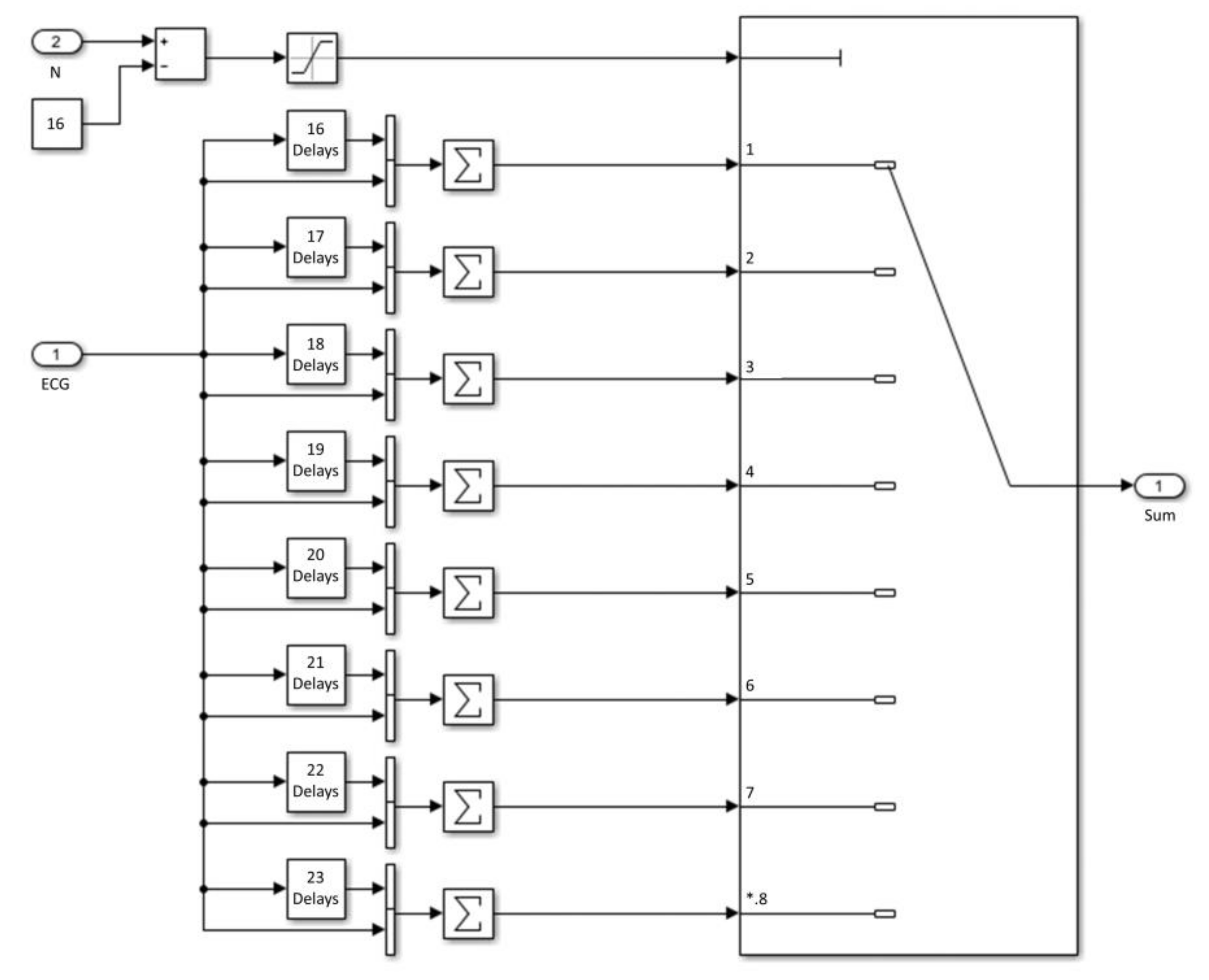
3.2. Adaptive Moving Average Filter (MAV)
The adaptive moving average filter is a digital filter that presents a behavior similar to bandpass FIR type digital filters. In the MAV, the algorithm uses the frequency tracked by the PLL to perform the filter tuning and generate the precise EMI noise cancellation.
MAV filters present some advantages for this application proposal, such as low computational cost with simple mathematical operations; ease of implementation; eliminates the main frequency (EMI) and its harmonics, preserving the intermediate frequencies; and it presents linear phase delay and narrow rejection range.
Conversely, as disadvantage, the attenuation of signal peaks can be a problem in the R waves of ECG signals.
The MAV has a window of variable size, which guarantees the adaptability of the algorithm to the frequency of the EMI noise. The MAV is configured to act with ±10 Hz at the EMI noise’s fundamental frequency. Due to its characteristics, it eliminates both the noise at the fundamental frequency and its harmonics. The window size N is defined according to Equation (5), but different from the MA filter, the cut-off value varies according to the reference frequency sent by the PLL algorithm, thus improving the SNR ratio.
Equation (13) describes the behavior of the adaptive filter, where
YMAV is the filtered ECG signal,
xi is the ECG signal read from the patient with EMI noise, and the filter order
N is a function of sampling frequency (
fa) and fundamental frequency of the estimated EMI noise through the PLL (
fn), as shown in Equation (14). The variation of the filter order as a function of the EMI frequency guarantees an adequate filtering even when there is a variation in the EMI frequency. Equations (13) and (14) are calculated as follows:
7. Conclusions
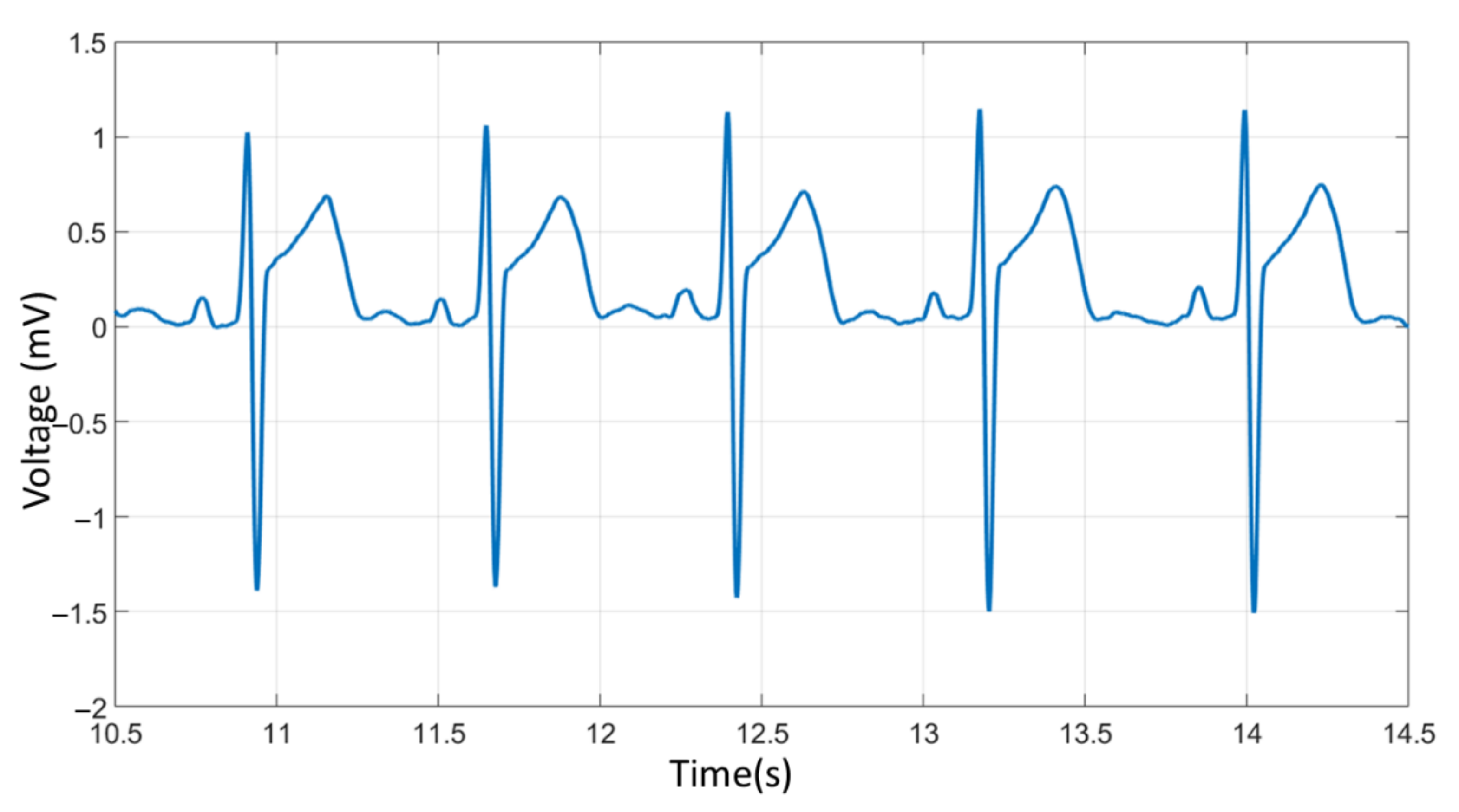
The proposed 2MAV-PLL algorithm presented an excellent signal-to-noise ratio compared to other methods proposed in the literature. It can eliminate the noise signals of a determined frequency plus a bandwidth of ±10 Hz. The amplitude of the input signal, both noise and original, does not interfere in the cancellation of the interferences, maintaining good results even when the amplitude of the noise varies.
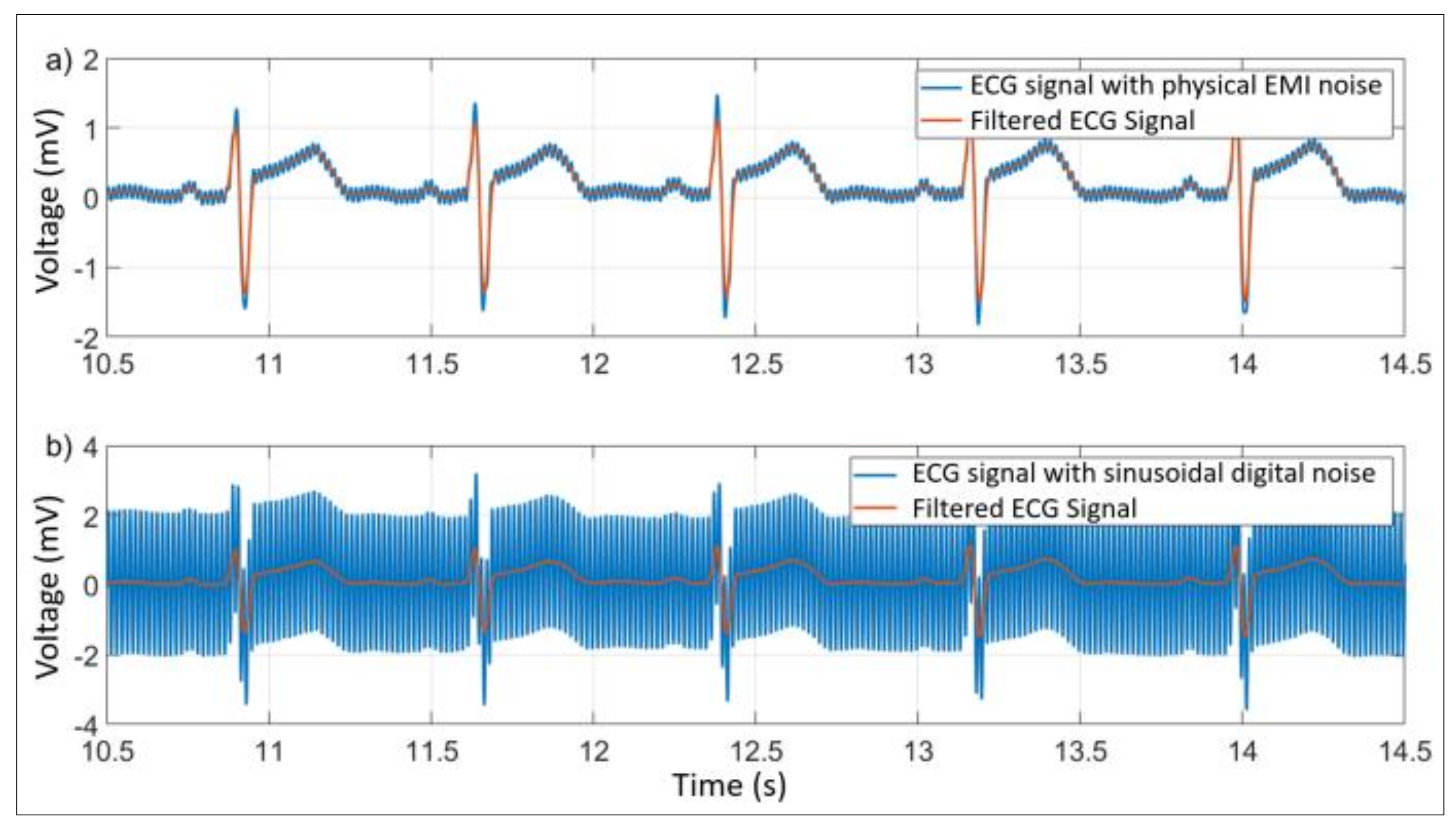
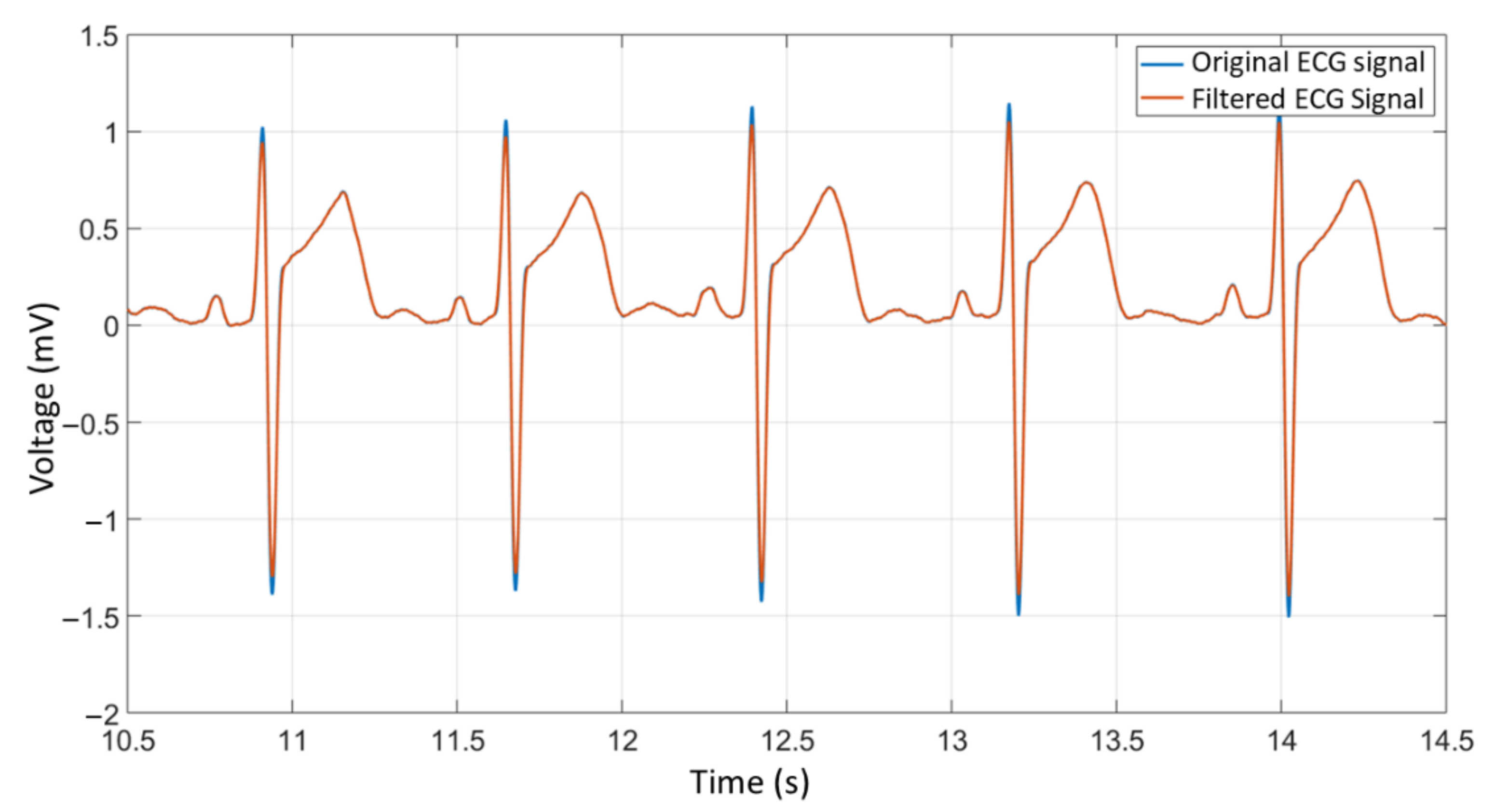
Observing the experimental evaluations, the SNR of the output signal remained close to the simulated results, where the signal was visually clean and detailed, (both with the EMI noise and with the sinusoidal digital noise), presenting an average SNR of 45 dB in the frequency of 60 Hz. In the simulated and experimental results, the peaks of the R and S waves were attenuated by nearly 10% of their amplitude, without compromising the width of the waves.
The delay generated by the filtering algorithm, during the simulated and experimental tests, was far below the standard limit (9.9 ms against 35 ms) and did not compromise the width of the waves nor their original characteristics. The attenuation was kept within reasonable values at the maximum amplitudes, and the waves with intermediate and low amplitudes did not suffer attenuation.
By the results of this work, it is possible to verify the real applicability of the proposed algorithm for its insertion in low-cost two electrodes ECG system. The low sampling rate and computational effort make the proposed algorithm suitable for low-cost embedded systems.
As future works, this ECG system can be improved and embed artificial intelligence algorithms to predict the initial phase of heart attack, sending an alarm message to any health system. It is important to verify that easy-to-use, low-cost EGCs are of vital importance as a point of care for monitoring at home fragile people, especially in the era of pandemics.


 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}