

Engineering IoT-Based Open MAS for Large-Scale V2G/G2V †
 , ,
, ,
Abstract
:1. Introduction
2. Background
2.1. Smart Grids and the V2G/G2V Problem
2.2. Frameworks and IoT-Based Real-World Trials
2.3. Engineering MASs
3. System Architecture
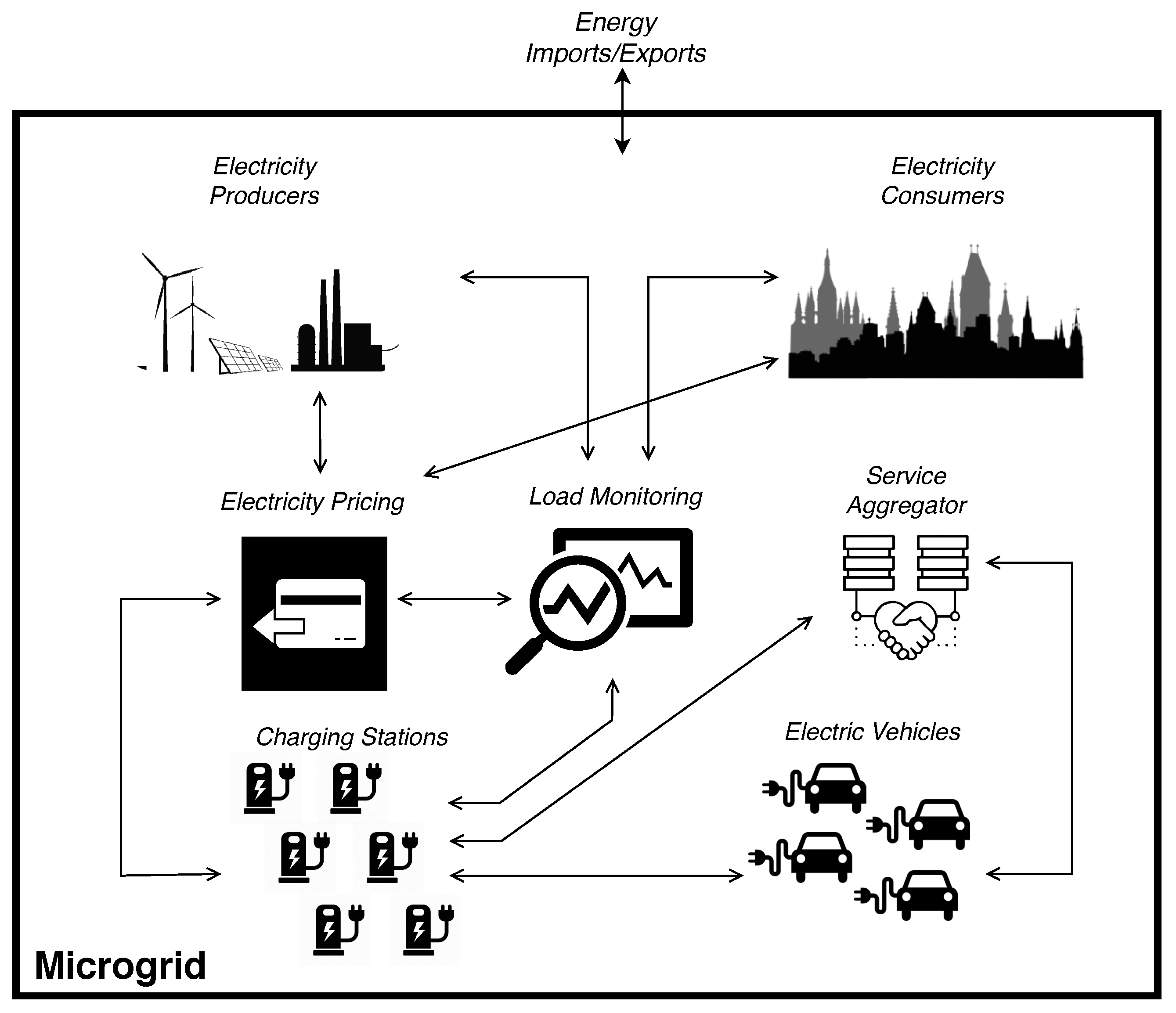
3.1. Overview of the Application Domain
- Electric vehicle (EV) owners, who are usually also the drivers of EVs. To effectively use their EVs, they need to book a place for charging them at appropriate stations, and they pay for such a service. They might even be interested in charging them at a lower price if the charging station could discharge their EV batteries to contribute to the network when prices are high, i.e., acting as prosumers. Here, we consider owners of both battery electric vehicles (BEV) and plug-in hybrid electric vehicles (PHEV).
- Charging station owners buy energy from producers to charge electric vehicles. In some cases they can utilize (partially) charged EVs by employing them as energy producers when network prices are high and then recharge the EVs later at a better rate.
- Electricity producers are typical (possibly renewable) energy producers. They sell power to the network at rates that are usually based on supply and demand. To compute the latter, they depend on electricity imbalance indicators, which are usually monitored by the global network operator.
- Electricity consumers are typical households, industries, and other buildings and their corresponding infrastructure.
- Station recommender service providers represent groups of stations and act as mediators between EVs and charging stations. EV owners depend on them to find stations that suit their schedule and preferences, and stations use them to reach out to customers. The represented groups of stations may belong at the same firm or may operate in the same region.
- Electricity imbalance providers can be network operators or government agencies that monitor the grid balance and calculate/predict the periods of electricity shortage and surplus.
- Mechanism designers are intermediate trusted third parties responsible for calculating dynamic prices and managing the various payments between the stakeholders listed above.
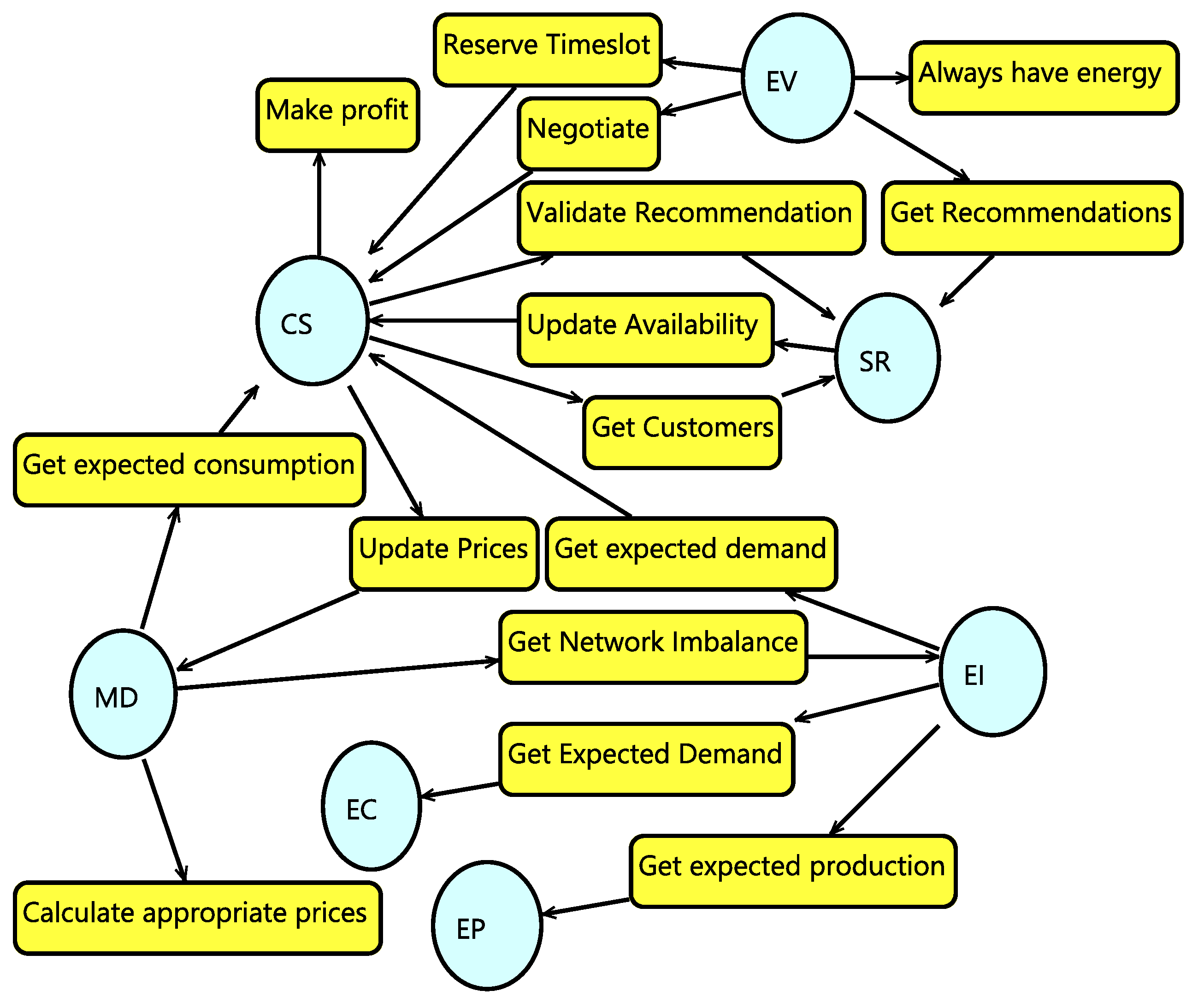
3.2. The Agent-Based Approach
- They are autonomous, meaning they can operate without the direct control of humans, and with at least some control over their own actions, their internal state, and resource consumption;
- Social, They are able to interact with other agents—including humans—and can choose their collaborators;
- They are reactive, perceiving and responding in a timely fashion to changes in the environment, according to their goals; and
- They are proactive, exhibiting goal-directed behavior by taking the initiative, being purposeful, and not simply acting in response to changes in the environment.
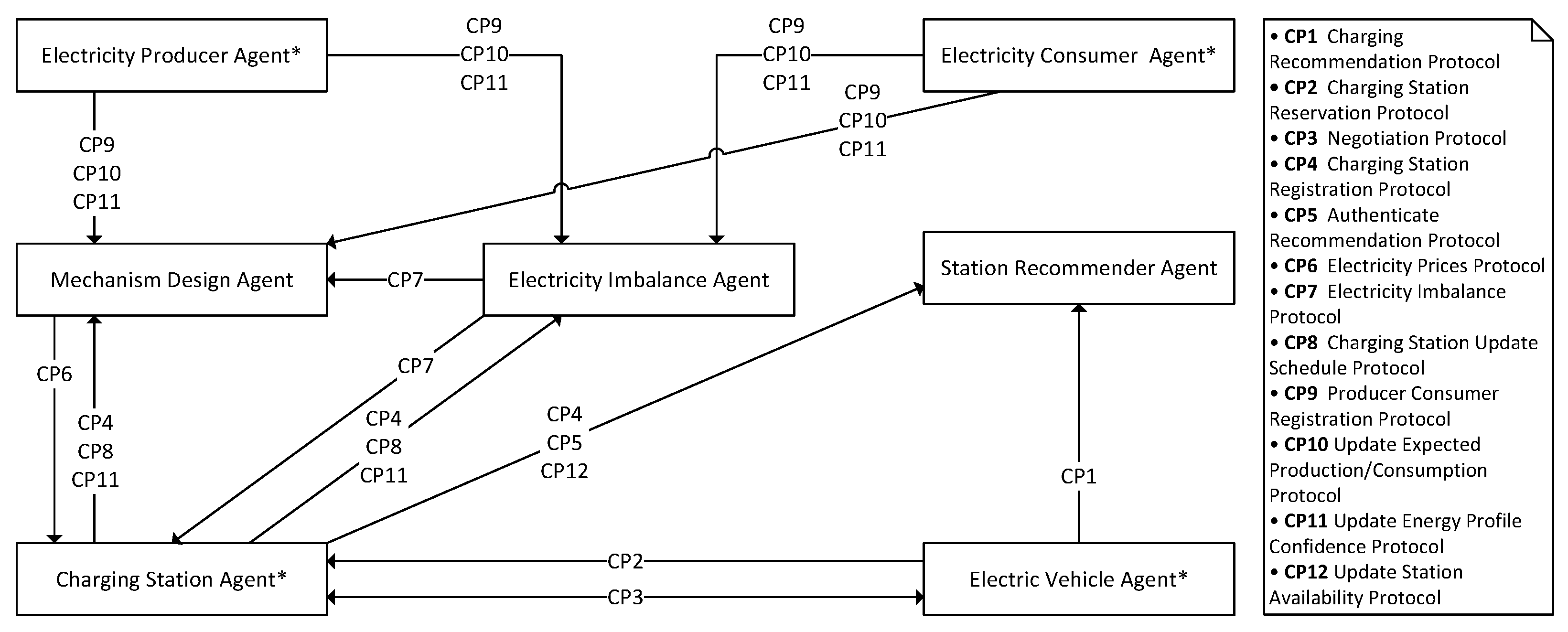
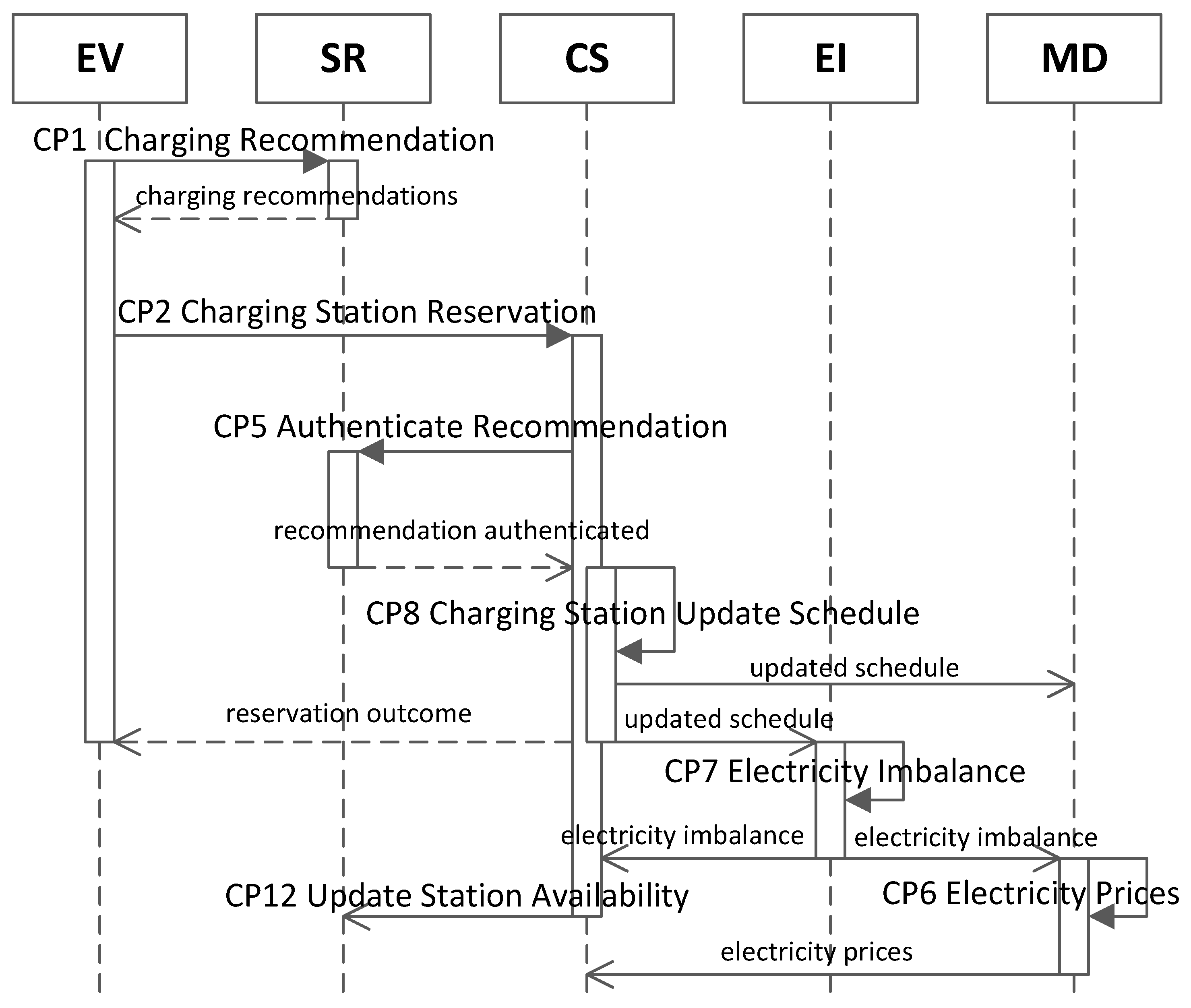
3.3. Agent Interactions
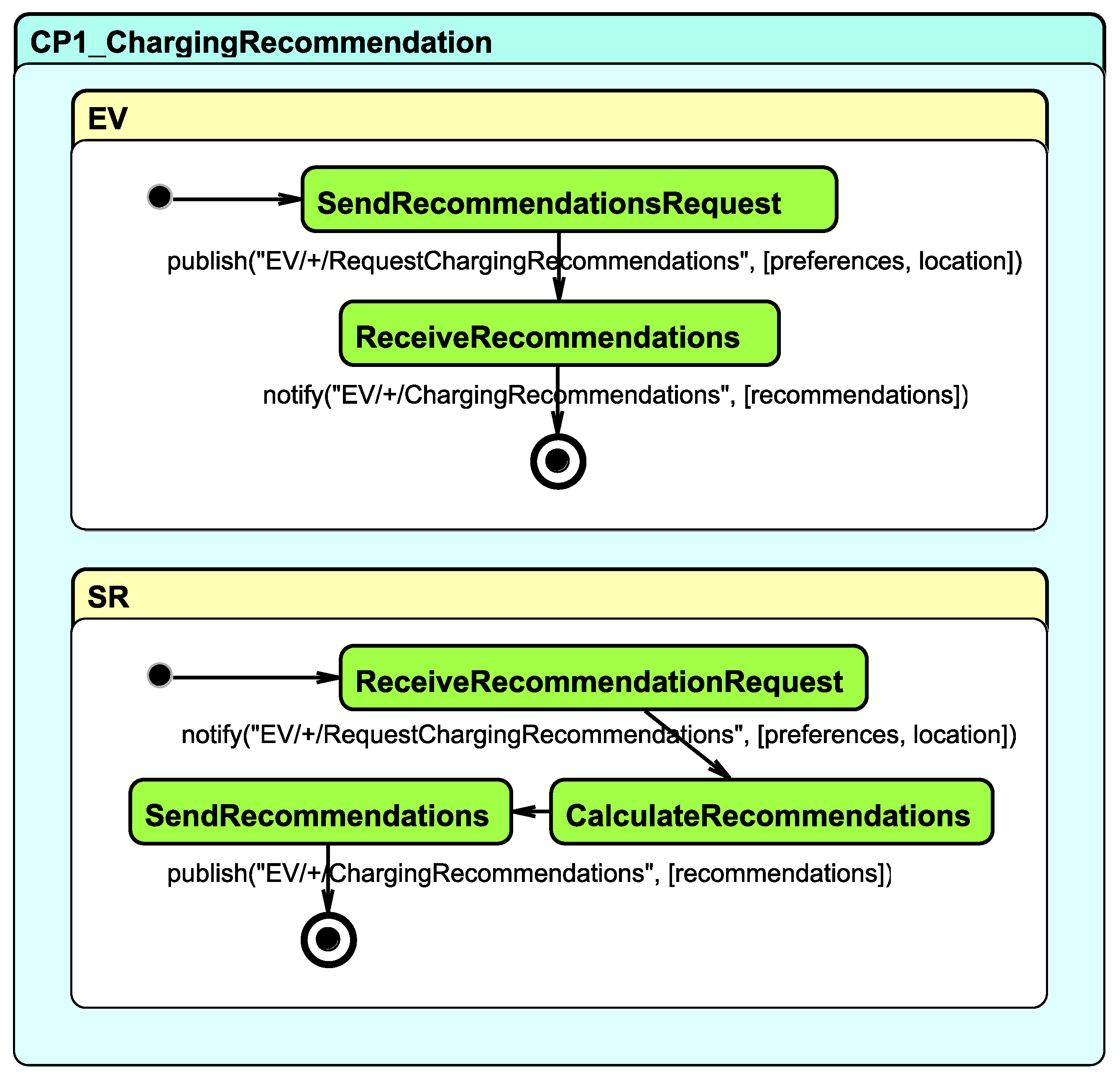
- CP1
- Charging Recommendation: Initiated by an EV for the scheduling of a charging session. The EV submits its preference and current location to the SR and receives a list of recommended CSs, along with the available time slots.
- CP2
- Charging Station Reservation: Following CP1, the EV uses CP2 to reserve the selected charging slot at the respective CS.
- CP3
- Negotiation: An optional protocol, which may be initiated after CP2, whenever either the CS or the EV, for whatever reason, needs to reschedule a charging session that has been reserved.
- CP4
- Charging Station Registration: This interaction is used to register new CSs into the system. According to it, the CS informs the MD, EI, and SR agents about the required specifications.
- CP5
- Authenticate Recommendation: After CP2, the CS asks the SR for validation that in fact the SR was the one that proposed the particular matchmaking between the EV and the CS.
- CP6
- Electricity Prices: This follows CP7 and involves the MD calculating updated prices and submit the new values to every CS.
- CP7
- Electricity Imbalance: This immediately follows CP10 or CP8. In the case that the expected production or consumption levels change, the EI must broadcast the updated values to the MD and every CS.
- CP8
- Charging Station Update Schedule: After CP5, the CS makes a reservation of the requested time slot and notifies the EI and the MD accordingly.
- CP9
- Producer Consumer Registration: Registers new producers and consumers. New stakeholders must inform EI and MD about their types.
- CP10
- Update Expected Production/Consumption: This is initiated periodically (e.g., at the beginning of each day). In this step, every producer and consumer agent informs the EI and MD agents regarding the coming day’s expected production and consumption levels.
- CP11
- Update Energy Profile Confidence: This is initiated periodically (e.g., at the beginning of each day). In this step, every producer and consumer agent informs the EI and MD agents regarding the confidence that accompanies the forecasts described in CP10.
- CP12
- Update Station Availability: Following CP2, this interaction is used by the CSs to update their information for the SR regarding available charging slots after new reservations.
4. System Development
4.1. Communication Using the IoT Platform
4.2. Agent Interaction Protocols
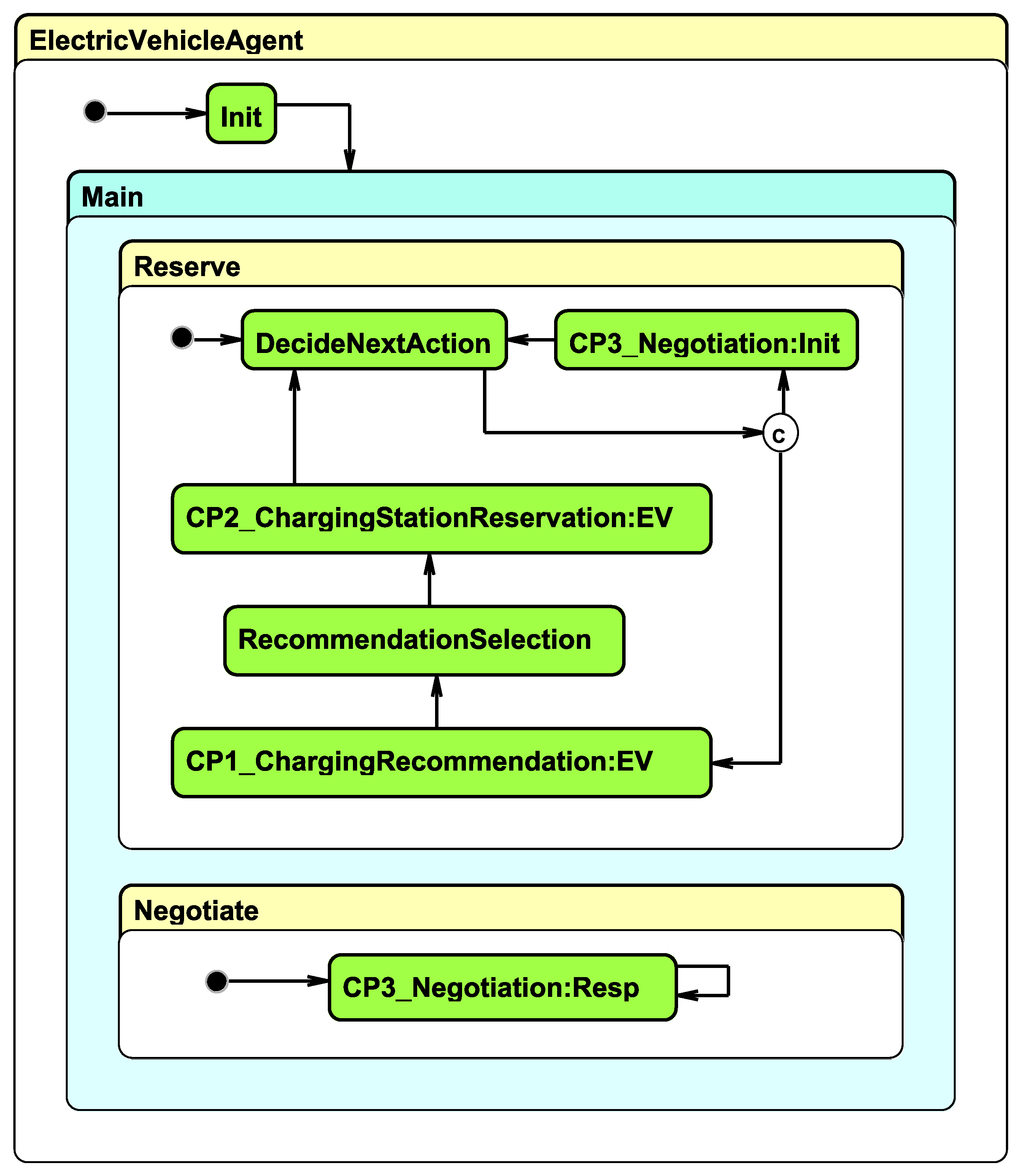
4.3. Agent Model
4.4. Scenario Demonstration
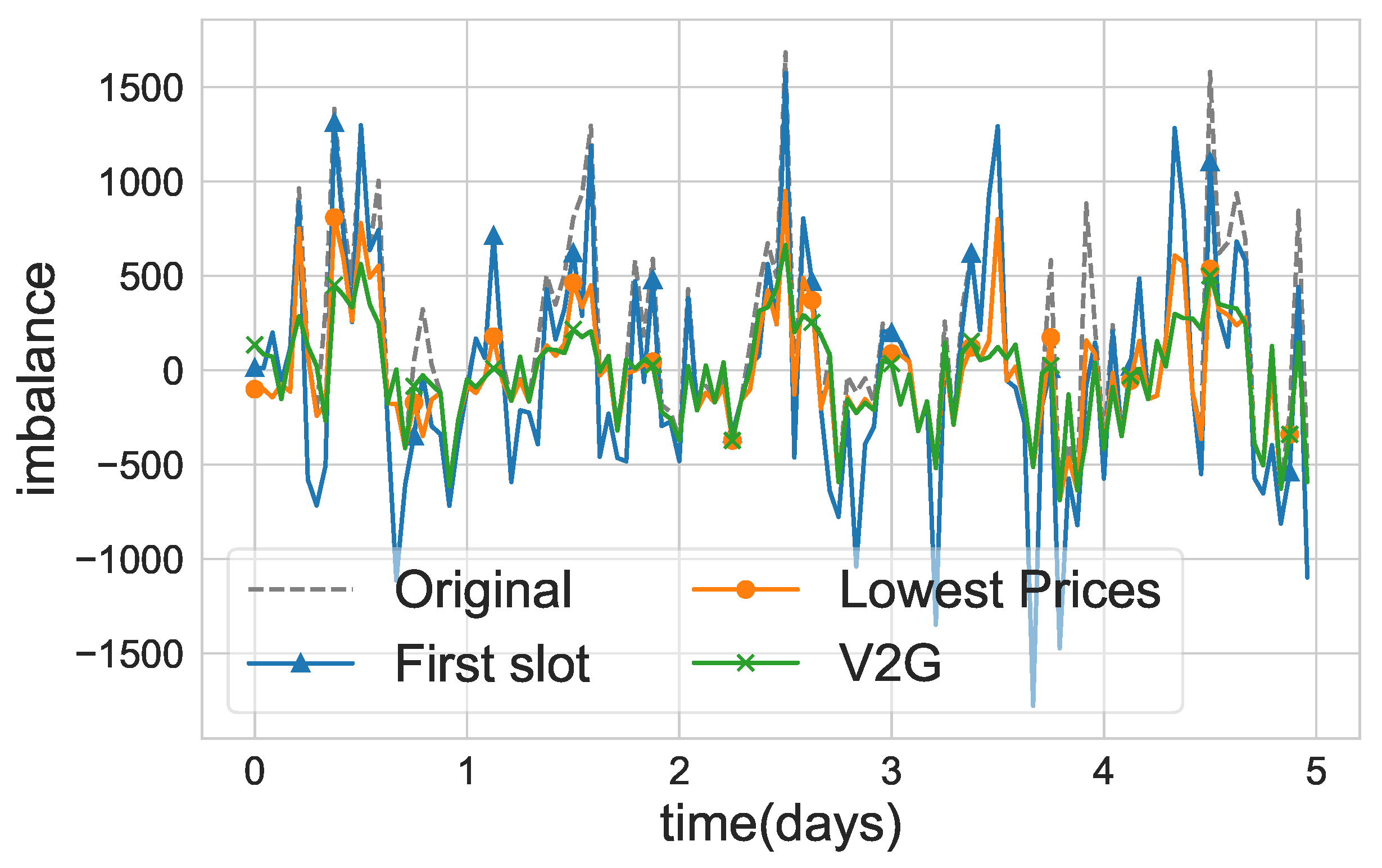
4.5. Implemented Agent Strategies
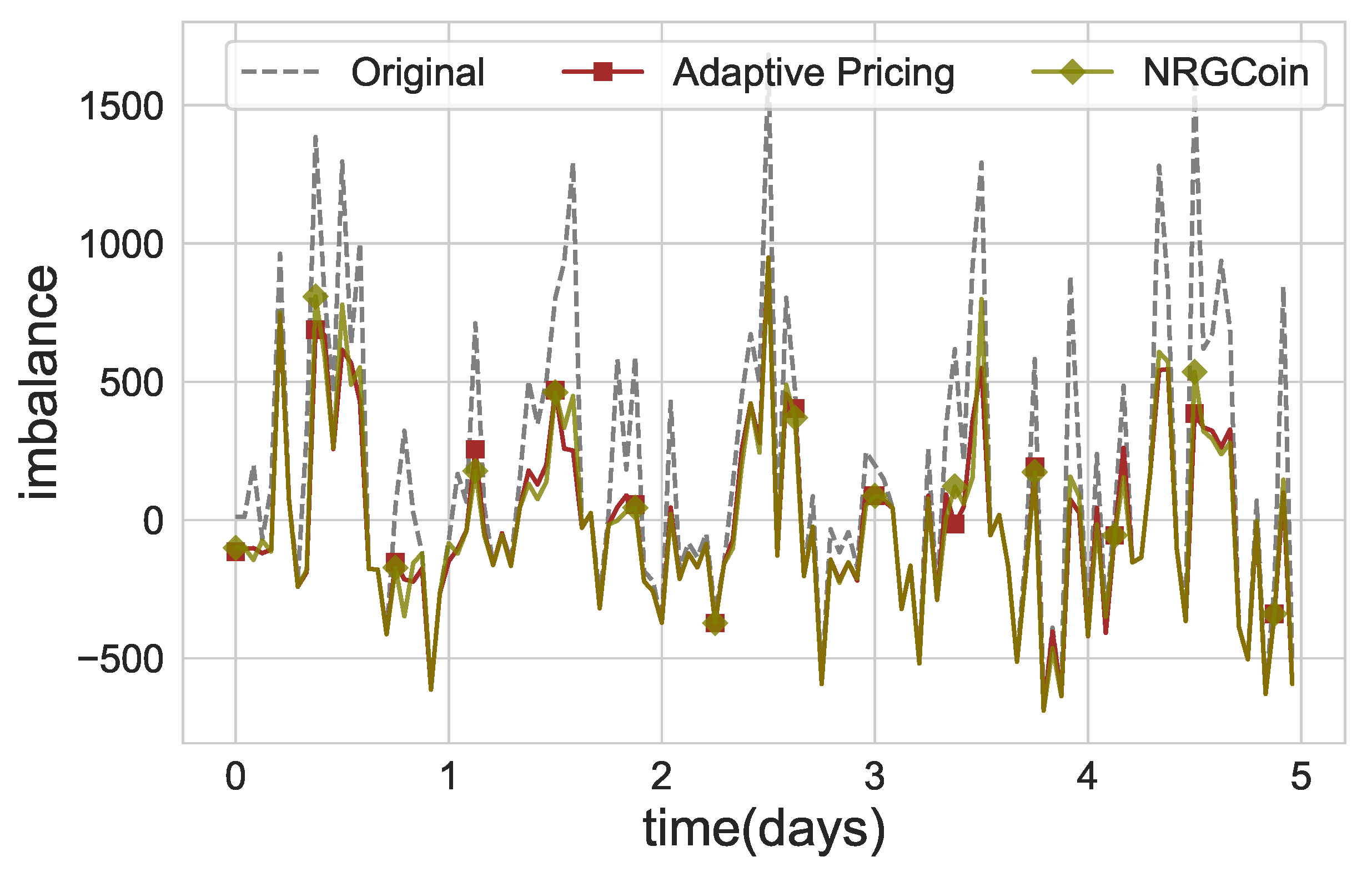
4.5.1. Electricity Price Calculation Algorithms Implemented by the Mechanism Design Agent
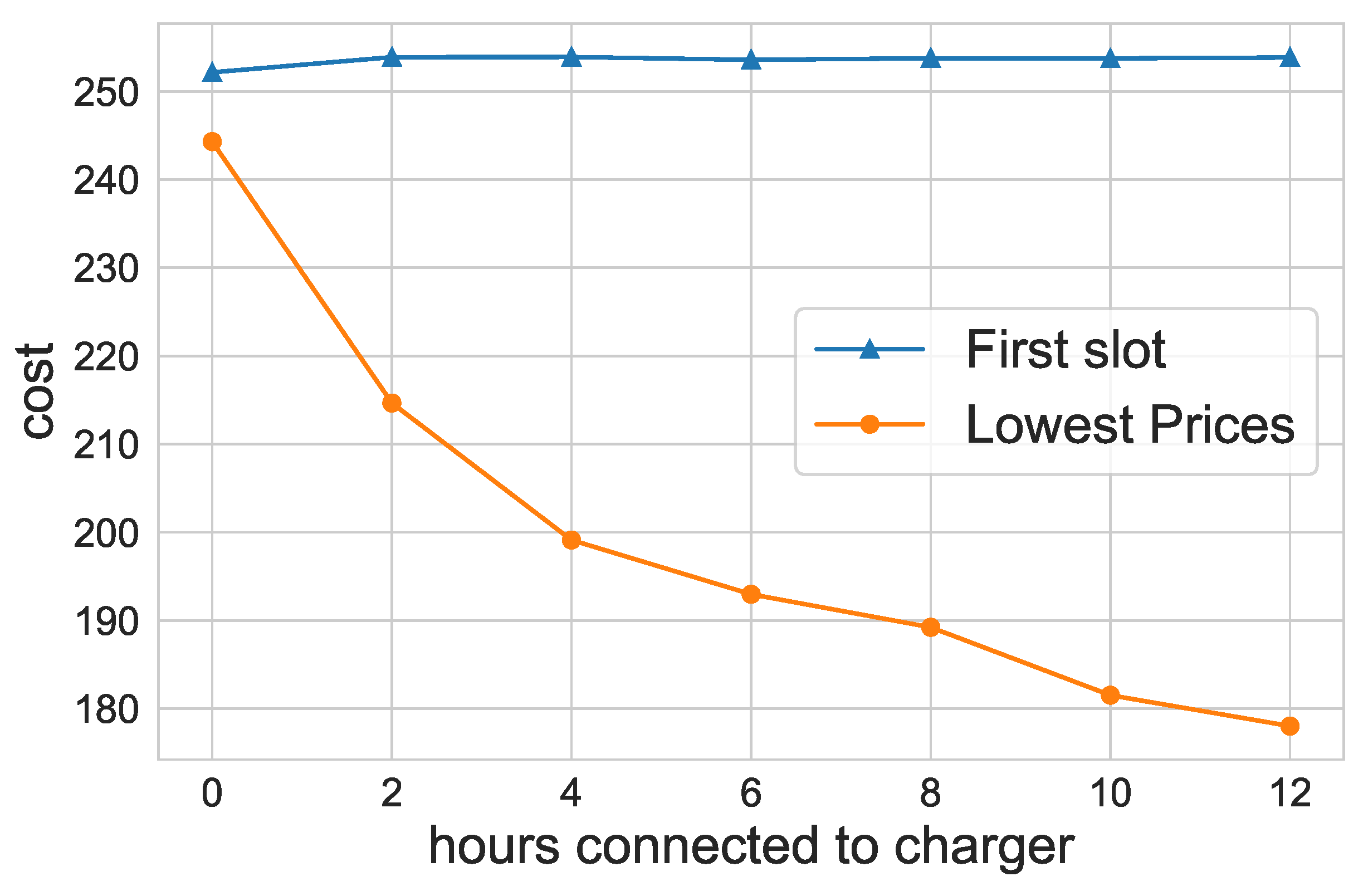
4.5.2. Charging Scheduling Approaches
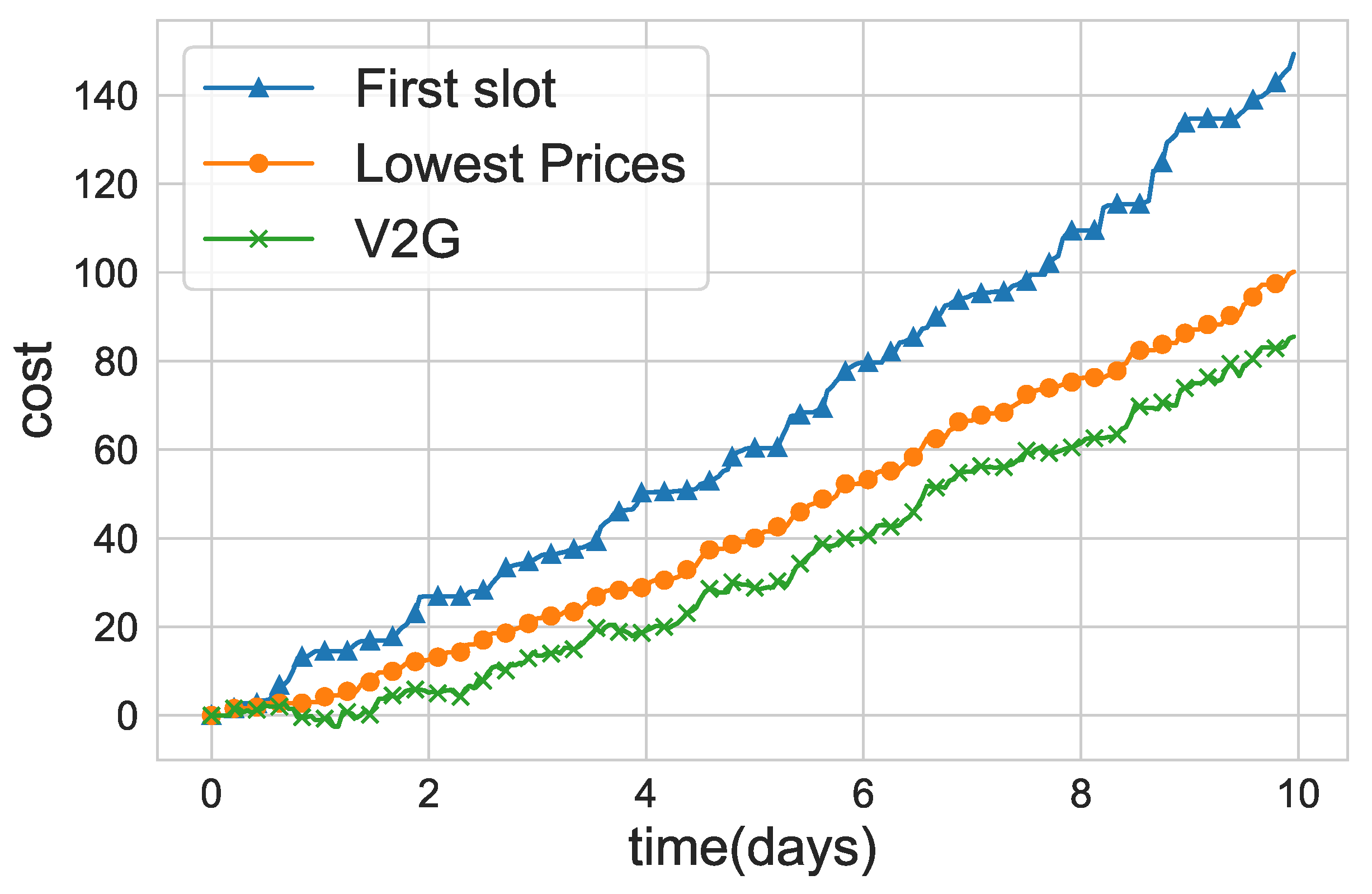
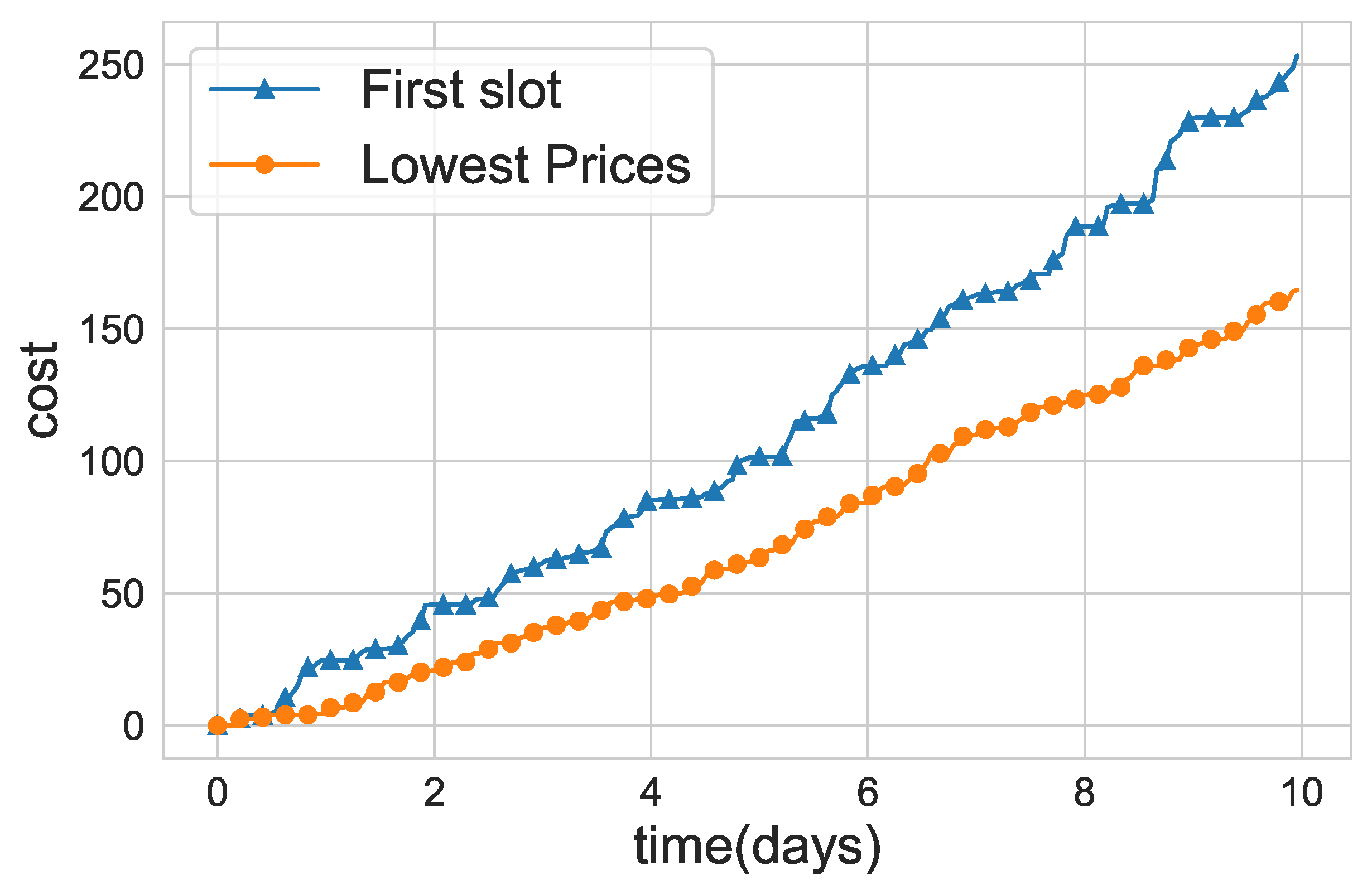
5. Experimental Evaluation
6. Discussion: Enabling Digital Twins and Real-World Integration
- The inter-agent control model (EAC): This can be shared with third parties. It contains both the activities (the basic states) and the topics that must be used by the agents to effectively participate in a protocol.
- The intra-agent control model (IAC): This is used for modeling the agent. It reuses parts of the EAC to ensure that the developed agents can be seamlessly integrated into the open MAS.
- Note that an EAC implementation can also be reused “as-is” by developers, who can use the same platform (e.g., Python) for developing their agents.
- It allows for synchronization between the physical world and the cyber domain. The design of our system is such that it can incorporate real-time updates even in simulation mode, which reflect the changes in the real world. For example, if a new charging station emerges, then a new CS agent appears in the system and starts pursuing its goals.
- It allows the co-simulaton and modeling of subsystems. This V2G/G2V system could be considered as a subsystem for the overall smart grid, or as an instance of many interconnected smart grids. These grids could be hierarchical, i.e., the available power could be determined by a producer or by a higher authority that manages grids. Moreover, one of the participating agents, e.g., a charging station, could itself be a multi-agent system of charging connectors participating in the V2G/G2V system, in the form of one station that can accommodate many vehicles.
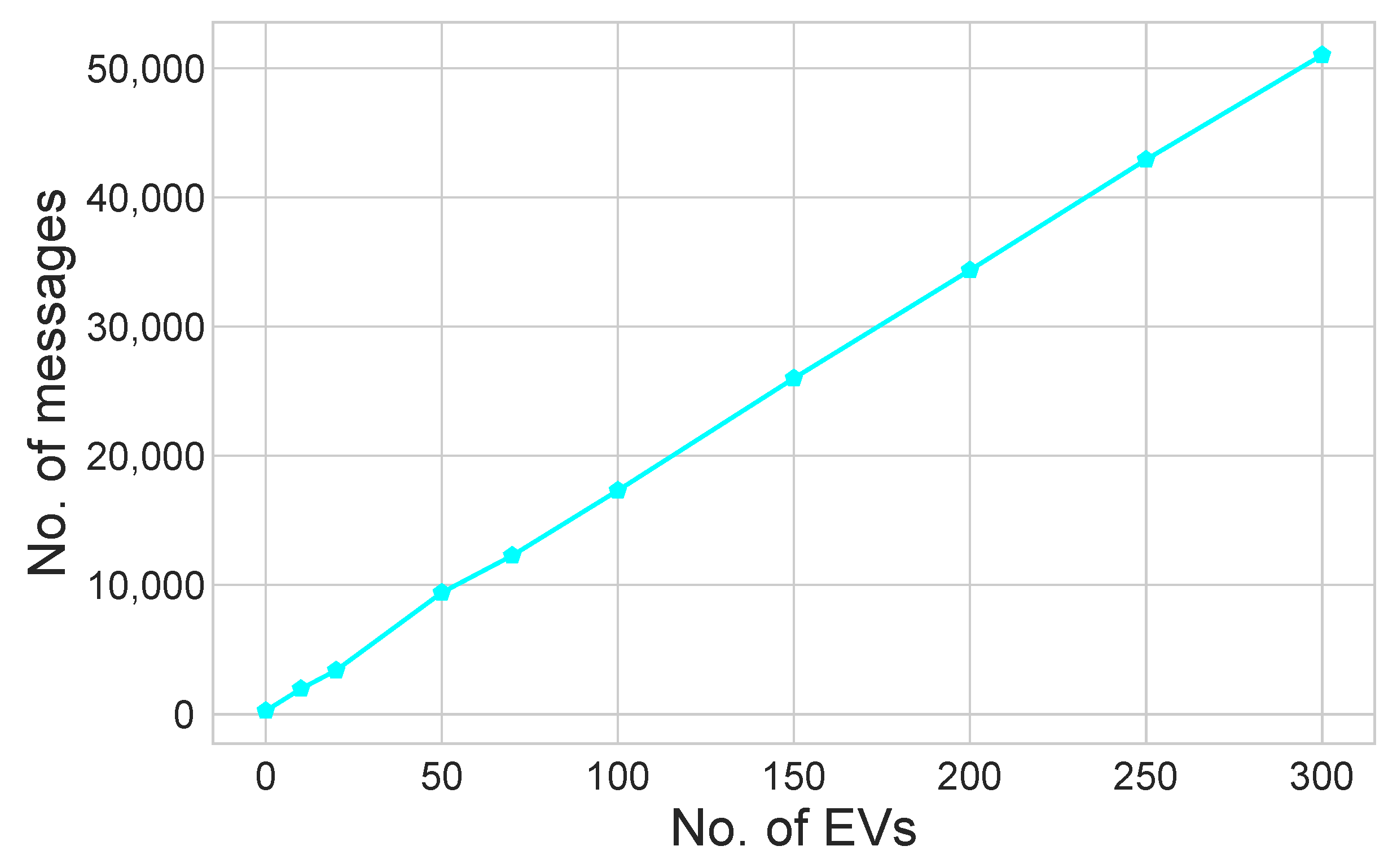
- Each resource is modeled as an agent, thus allowing the system to be scaled regardless of the complexity of interactions. The system scales linearly, as we demonstrated in our experimental evaluation (Figure 13).
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
| 1 | https://jade.tilab.com/ (accessed on 18 March 2023) |
| 2 | https://github.com/SwitchEV/RISE-V2G (accessed on 18 March 2023). |
| 3 | The message queue transport telemetry (MQTT) protocol is an OASIS standard messaging protocol for the Internet of Things, mqtt.org https://mqtt.org/ (accessed on 18 March 2023). |
| 4 | REpresentational State Transfer (REST) over Hypertext Transfer Protocol (HTTP). |
| 5 | More detailed descriptions of the inter- and intra-agent controls and a detailed description of the protocols, including the message syntax and semantics, can be found in our online repository: https://github.com/iatrakis/IoT-V2G-G2V (accessed on 18 March 2023). |
| 6 | This is very useful for experimentation with large agent populations. |
| 7 | Several battery charging models have been introduced in the past, considering load transfer constraints and mobility patterns (see, e.g., [54,55,56]). In our study, we do not require any particular models for calculating travel duration and battery SOC, since such values are acquired directly as sensor measurements. Of course, any of the battery charging models proposed to date could be incorporated in each individual agent implementation if deemed necessary by the strategy. |
| 8 | Specifically, consumption and production data originated from a synthetic dataset generator [59], which was trained on information from the ENTSOE https://transparency.entsoe.eu (accessed on 18 March 2023) platform, and on EV data from the MyElectricAvenue https://eatechnology.com/resources/projects/my-electric-avenue/ (accessed on 18 March 2023) project. |
| 9 | This was selected because the lowest prices was shown in the first use-case to perform better than the first slot method. Note that using the top-scoring V2G scheduling method was not an available option, since one of the pricing methods we intended to evaluate in this third use-case, adaptive pricing, does not support V2G activities (cf. Section 4.5). |
References
- Burke, M.J.; Stephens, J.C. Energy democracy: Goals and policy instruments for sociotechnical transitions. Energy Res. Soc. Sci. 2017, 33, 35–48. [Google Scholar] [CrossRef]
- Ketter, W.; Collins, J.; Reddy, P. Power TAC: A competitive economic simulation of the smart grid. Energy Econ. 2013, 39, 262–270. [Google Scholar] [CrossRef]
- Ghasempour, A. Internet of things in smart grid: Architecture, applications, services, key technologies, and challenges. Inventions 2019, 4, 22. [Google Scholar] [CrossRef] [Green Version]
- Espe, E.; Potdar, V.; Chang, E. Prosumer Communities and Relationships in Smart Grids: A Literature Review, Evolution and Future Directions. Energies 2018, 11, 2528. [Google Scholar] [CrossRef] [Green Version]
- Wooldridge, M.; Jennings, N.R. Intelligent Agents: Theory and Practice. Knowl. Eng. Rev. 1995, 10, 115–152. [Google Scholar] [CrossRef] [Green Version]
- Huynh, T.D.; Jennings, N.R.; Shadbolt, N.R. An integrated trust and reputation model for open multi-agent systems. Auton. Agents-Multi-Agent Syst. 2006, 13, 119–154. [Google Scholar] [CrossRef]
- Hattab, S.; Chaari, W.L. A generic model for representing openness in multi-agent systems. Knowl. Eng. Rev. 2021, 36, e3. [Google Scholar] [CrossRef]
- Mahela, O.P.; Khosravy, M.; Gupta, N.; Khan, B.; Alhelou, H.H.; Mahla, R.; Patel, N.; Siano, P. Comprehensive overview of multi-agent systems for controlling smart grids. CSEE J. Power Energy Syst. 2020, 8, 115–131. [Google Scholar]
- Chalkiadakis, G.; Elkind, E.; Wooldridge, M. Computational Aspects of Cooperative Game Theory; Synthesis Lectures on Artificial Intelligence and Machine Learning; Morgan & Claypool Publishers: San Rafael, CA, USA, 2011. [Google Scholar]
- Hossein Motlagh, N.; Mohammadrezaei, M.; Hunt, J.; Zakeri, B. Internet of Things (IoT) and the energy sector. Energies 2020, 13, 494. [Google Scholar] [CrossRef] [Green Version]
- Noura, M.; Atiquzzaman, M.; Gaedke, M. Interoperability in internet of things: Taxonomies and open challenges. Mob. Netw. Appl. 2019, 24, 796–809. [Google Scholar] [CrossRef] [Green Version]
- Brosinsky, C.; Westermann, D.; Krebs, R. Recent and prospective developments in power system control centers: Adapting the digital twin technology for application in power system control centers. In Proceedings of the 2018 IEEE International Energy Conference (ENERGYCON), Limassol, Cyprus, 3–7 June 2018; pp. 1–6. [Google Scholar]
- Zhou, M.; Yan, J.; Feng, D. Digital twin framework and its application to power grid online analysis. CSEE J. Power Energy Syst. 2019, 5, 391–398. [Google Scholar] [CrossRef]
- Shahinzadeh, H.; Moradi, J.; Gharehpetian, G.B.; Nafisi, H.; Abedi, M. IoT architecture for smart grids. In Proceedings of the 2019 International Conference on Protection and Automation of Power System (IPAPS), Tehran, Iran, 8–9 January 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 22–30. [Google Scholar]
- Nisan, N. Introduction to Mechanism Design (for Computer Scientists). In Algorithmic Game Theory; Nisan, N., Roughgarden, T., Tardos, E., Vazirani, V., Eds.; Cambridge University Press: Cambridge, UK, 2007; pp. 209–242. [Google Scholar]
- Akasiadis, C.; Pitsilis, V.; Spyropoulos, C.D. A Multi-Protocol IoT Platform Based on Open-Source Frameworks. Sensors 2019, 19, 4217. [Google Scholar] [CrossRef] [Green Version]
- Akasiadis, C.; Iatrakis, G.; Spanoudakis, N.; Chalkiadakis, G. An Open MAS/IoT-Based Architecture for Large-Scale V2G/G2V. In The PAAMS Collection, Proceedings of the Advances in Practical Applications of Agents, Multi-Agent Systems, and Complex Systems Simulation, L’Aquila, Italy, 13–15 July 2022; Dignum, F., Mathieu, P., Corchado, J.M., De La Prieta, F., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 3–14. [Google Scholar]
- Spanoudakis, N.I.; Moraitis, P. The ASEME Methodology. Int. J.-Agent-Oriented Softw. Eng. 2022, 7, 79–107. [Google Scholar] [CrossRef]
- Spanoudakis, N.; Moraitis, P. Engineering Ambient Intelligence Systems Using Agent Technology. IEEE Intell. Syst. 2015, 30, 60–67. [Google Scholar] [CrossRef]
- Zambonelli, F. Key Abstractions for IoT-Oriented Software Engineering. IEEE Softw. 2017, 34, 38–45. [Google Scholar] [CrossRef]
- Savaglio, C.; Ganzha, M.; Paprzycki, M.; Bădică, C.; Ivanović, M.; Fortino, G. Agent-based Internet of Things: State-of-the-art and research challenges. Future Gener. Comput. Syst. 2020, 102, 1038–1053. [Google Scholar] [CrossRef]
- Fortino, G.; Savaglio, C.; Spezzano, G.; Zhou, M. Internet of things as system of systems: A review of methodologies, frameworks, platforms, and tools. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 223–236. [Google Scholar] [CrossRef]
- International Energy Agency. Global EV Outlook: Towards Cross-Modal Electrification; IEA: Paris, France, 2018. [Google Scholar]
- Danner, D.; Duschl, W.; de Meer, H. Fair charging service allocation for electric vehicles in the power distribution grid. In Proceedings of the e-Energy ’19, Phoenix, AZ, USA, 25–28 June 2019; pp. 406–408. [Google Scholar]
- Sarkar, R.; Saha, P.K.; Mondal, S.; Mondal, A. Intelligent Scheduling of V2G, V2V, G2V Operations in a Smart Microgrid. In Proceedings of the e-Energy ’20, Virtual Event, 22–26 June 2020; pp. 417–418. [Google Scholar]
- Karfopoulos, E.L.; Hatziargyriou, N.D. A Multi-Agent System for Controlled Charging of a Large Population of Electric Vehicles. IEEE Trans. Power Syst. 2013, 28, 1196–1204. [Google Scholar] [CrossRef]
- Rigas, E.S.; Karapostolakis, S.; Bassiliades, N.; Ramchurn, S.D. EVLibSim: A tool for the simulation of electric vehicles’ charging stations using the EVLib library. Simul. Model. Pract. Theory 2018, 87, 99–119. [Google Scholar] [CrossRef] [Green Version]
- Jordán, J.; Palanca, J.; del Val, E.; Julian, V.; Botti, V. MASEV: A MAS for the Analysis of Electric Vehicle Charging Stations Location. In The PAAMS Collection, Proceedings of the Advances in Practical Applications of Agents, Multi-Agent Systems, and Complexity, Toledo, Spain, 20–22 June 2018; Demazeau, Y., An, B., Bajo, J., Fernández-Caballero, A., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 326–330. [Google Scholar]
- Kamboj, S.; Kempton, W.; Decker, K.S. Deploying power grid-integrated electric vehicles as a multi-agent system. In Proceedings of the 10th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2011), Taipei, Taiwan, 2–6 May 2011; pp. 13–20. [Google Scholar]
- Bellifemine, F.L.; Caire, G.; Greenwood, D. Developing Multi-Agent Systems with JADE; Wiley Series in Agent Technology; John Wiley and Sons Ltd.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Papadopoulos, P.; Jenkins, N.; Cipcigan, L.M.; Grau, I.; Zabala, E. Coordination of the Charging of Electric Vehicles Using a Multi-Agent System. IEEE Trans. Smart Grid 2013, 4, 1802–1809. [Google Scholar] [CrossRef]
- Lipman, T.; Callaway, D.; Peffer, T.; von Meier Alexandra, E.A. Open-Source, Open-Architecture Software Platform for Plug-In Electric Vehicle Smart Charging in California; California Energy Commission: Sacramento, CA, USA, 2020. [Google Scholar]
- Van Aubel, P.; Poll, E. Security of EV-charging protocols. arXiv 2022, arXiv:2202.04631. [Google Scholar]
- Käbisch, S.; Peintner, D.; Heuer, J.; Schmutzler, J.; Gröning, S.; Lauterbach, M. The OpenV2G Project. Available online: https://openv2g.sourceforge.net (accessed on 18 March 2023).
- Sheppard, C.; Jenn, A. Grid-Integrated Electric Mobility Model (GEM) v1.0; US Department of Energy: Washington, DC, USA, 2021. [Google Scholar]
- Lee, Z.; Johansson, D.; Low, S.H. ACN-Sim: An Open-Source Simulator for Data-Driven Electric Vehicle Charging Research. In Proceedings of the e-Energy ’19, Phoenix, AZ, USA, 25–28 June 2019; ACM: New York, NY, USA, 2019; pp. 411–412. [Google Scholar]
- Unified Modeling Language, Superstructure, V2.1.2; Technical Report formal/07-11-02; Object Management Group: Needham, MA, USA, 2007.
- Busetta, P.; Howden, N.; Rönnquist, R.; Hodgson, A. Structuring BDI agents in functional clusters. In Proceedings of the International Workshop on Agent Theories, Architectures, and Languages, Orlando, FL, USA, 15–17 July 1999; Springer: Berlin/Heidelberg, Germany, 1999; pp. 277–289. [Google Scholar]
- Braubach, L.; Pokahr, A.; Lamersdorf, W. Extending the capability concept for flexible BDI agent modularization. In Proceedings of the International Workshop on Programming Multi-Agent Systems, Utrecht, The Netherlands, 26 July 2005; Springer: Berlin/Heidelberg, Geimany; pp. 139–155. [Google Scholar]
- Padgham, L.; Winikoff, M. Developing Intelligent Agent Systems: A Practical Guide; Wiley Series in Agent Technology; Wiley: Hoboken, NJ, USA, 2004; p. 240. [Google Scholar]
- Trencansky, I.; Cervenka, R. Agent Modeling Language (AML): A comprehensive approach to modeling MAS. Informatica 2005, 29, 391–400. [Google Scholar]
- Harel, D.; Naamad, A. The STATEMATE Semantics of Statecharts. ACM Trans. Softw. Eng. Methodol. 1996, 5, 293. [Google Scholar] [CrossRef] [Green Version]
- Mazouzi, H.; Seghrouchni, A.E.F.; Haddad, S. Open Protocol Design for Complex Interactions in Multi-agent Systems. In Proceedings of the First International Joint Conference on Autonomous Agents and Multiagent Systems: Part 2, AAMAS ’02, Bologna, Italy, 15–19 July 2002; ACM: New York, NY, USA, 2002; pp. 517–526. [Google Scholar]
- Rathor, S.K.; Saxena, D. Energy management system for smart grid: An overview and key issues. Int. J. Energy Res. 2020, 44, 4067–4109. [Google Scholar] [CrossRef]
- Käbisch, S.; Schmitt, A.; Winter, M.; Heuer, J. Interconnections and Communications of Electric Vehicles and Smart Grids. In Proceedings of the 2010 First IEEE International Conference on Smart Grid Communications, Gaithersburg, MD, USA, 4–6 October 2010; pp. 161–166. [Google Scholar]
- El-hawary, M.E. The Smart Grid—State-of-the-art and Future Trends. Electr. Power Components Syst. 2014, 42, 239–250. [Google Scholar] [CrossRef]
- Weiss, G. Multiagent Systems: A Modern Approach to Distributed Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Carli, R.; Dotoli, M. A Distributed Control Algorithm for Optimal Charging of Electric Vehicle Fleets with Congestion Management. 15th IFAC Symposium on Control in Transportation Systems CTS 2018. IFAC-PapersOnLine 2018, 51, 373–378. [Google Scholar] [CrossRef]
- Decker, K.; Sycara, K.; Williamson, M. Middle-agents for the internet. In Proceedings of the 15th International Joint Conference on Artificial Intelligence (IJCAI 97), Nagoya, Japan, 23–29 August 1997; pp. 578–583. [Google Scholar]
- Spanoudakis, N.; Moraitis, P. An Agent Modeling Language Implementing Protocols through Capabilities. In Proceedings of the 2008 IEEE/WIC/ACM International Conference on Web Intelligence and Intelligent Agent Technology, Sydney, Australia, 9–12 December 2008; IEEE Computer Society: Washington, DC, USA, 2008; Volume 2, pp. 578–582. [Google Scholar]
- Mihaylov, M.; Jurado, S.; Avellana, N.; van Moffaert, K.; de Abril, I.M.; Nowe, A. NRGcoin: Virtual currency for trading of renewable energy in smart grids. In Proceedings of the 11th International Conference on the EU energy market (EEM14), Krakow, Poland, 28–30 May 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]
- Akasiadis, C.; Chalkiadakis, G. Decentralized Large-Scale Electricity Consumption Shifting by Prosumer Cooperatives. In Proceedings of the ECAI, Hague, The Netherlands, 29 August–2 September 2016; pp. 175–183. [Google Scholar]
- Valogianni, K.; Ketter, W.; Collins, J.; Zhdanov, D. Sustainable electric vehicle charging using adaptive pricing. Prod. Oper. Manag. 2020, 29, 1550–1572. [Google Scholar] [CrossRef]
- Koufakis, A.M.; Rigas, E.S.; Bassiliades, N.; Ramchurn, S.D. Offline and online electric vehicle charging scheduling with V2V energy transfer. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2128–2138. [Google Scholar] [CrossRef]
- Angelidakis, A.; Chalkiadakis, G. Factored MDPS for Optimal Prosumer Decision-Making. In Proceedings of the 2015 International Conference on Autonomous Agents and Multiagent Systems, AAMAS ’15, Istanbul, Turkey, 4–8 May 2015; International Foundation for Autonomous Agents and Multiagent Systems: Richland, SC, USA, 2015; pp. 503–511. [Google Scholar]
- Kelly, J.C.; MacDonald, J.S.; Keoleian, G.A. Time-dependent plug-in hybrid electric vehicle charging based on national driving patterns and demographics. Appl. Energy 2012, 94, 395–405. [Google Scholar] [CrossRef]
- Liao, J.T.; Huang, H.W.; Yang, H.T.; Li, D. Decentralized V2G/G2V Scheduling of EV Charging Stations by Considering the Conversion Efficiency of Bidirectional Chargers. Energies 2021, 14, 962. [Google Scholar] [CrossRef]
- Kempton, W.; Tomic, J.; Letendre, S.; Brooks, A.; Lipman, T. Vehicle-to-Grid Power: Battery, Hybrid, and Fuel Cell Vehicles as Resources for Distributed Electric Power in California; UC Davis Research Reports; UC Davis, Institute of Transportation Studies: Davis, CA, USA, 2001. [Google Scholar]
- Charalambidis, G.; Akasiadis, C.; Rigas, E.S.; Chalkiadakis, G. A Realistic Dataset Generator for Smart Grid Ecosystems with Electric Vehicles. In Proceedings of the Thirteenth ACM International Conference on Future Energy Systems, e-Energy ’22, Virtual Event, 28 June–1 July 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 432–433. [Google Scholar] [CrossRef]
- Noel, L.; Zarazua de Rubens, G.; Kester, J.; Sovacool, B.K. Navigating expert skepticism and consumer distrust: Rethinking the barriers to vehicle-to-grid (V2G) in the Nordic region. Transp. Policy 2019, 76, 67–77. [Google Scholar] [CrossRef]
- Weyns, D.; Michel, F. Agent Environments for Multi-agent Systems–A Research Roadmap. In Proceedings of the Agent Environments for Multi-Agent Systems IV, Paris, France, 6 May 2014; Weyns, D., Michel, F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 3–21. [Google Scholar]
- Ragazzini, L.; Negri, E.; Fumagalli, L. Modelling Manufacturing Systems for Digital Twin Through Communicating Finite State Machines. In Proceedings of the Service Oriented, Holonic and Multi-Agent Manufacturing Systems for Industry of the Future, Valencia, Spain, 3–4 October 2019; Borangiu, T., Trentesaux, D., Leitão, P., Eds.; Springer International Publishing: Cham, Switzerland, 2023; pp. 85–95. [Google Scholar]
- Stüdli, S.; Crisostomi, E.; Middleton, R.; Shorten, R. A flexible distributed framework for realising electric and plug-in hybrid vehicle charging policies. Int. J. Control 2012, 85, 1130–1145. [Google Scholar] [CrossRef]
- Scarabaggio, P.; Carli, R.; Cavone, G.; Dotoli, M. Smart Control Strategies for Primary Frequency Regulation through Electric Vehicles: A Battery Degradation Perspective. Energies 2020, 13, 4586. [Google Scholar] [CrossRef]
- Yan, G.; Liu, D.; Li, J.; Mu, G. A cost accounting method of the Li-ion battery energy storage system for frequency regulation considering the effect of life degradation. Prot. Control Mod. Power Syst. 2018, 3, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Rigas, E.; Akasiadis, C.; Vardaki, E.; Chalkiadakis, G. AI and Social Anthropology for Large-Scale Vehicle-to-Grid Schemes. In Proceedings of the 12th Hellenic Conference on Artificial Intelligence, Corfu, Greece, 7–9 September 2022; pp. 1–4. [Google Scholar]
- Bunse, C.; Klingert, S.; Schulze, T. Greenslas: Supporting energy-efficiency through contracts. In Proceedings of the Energy Efficient Data Centers: First InternationalWorkshop, E 2 DC 2012, Madrid, Spain, 8 May 2012; Revised Selected Papers 1. Springer: Berlin/Heidelberg, Germany, 2012; pp. 54–68. [Google Scholar]
- Mens, T.; Decan, A.; Spanoudakis, N.I. A method for testing and validating executable statechart models. Softw. Syst. Model. 2019, 18, 837–863. [Google Scholar] [CrossRef]
- Sharifi, S.; Parvizimosaed, A.; Amyot, D.; Logrippo, L.; Mylopoulos, J. Symboleo: Towards a specification language for legal contracts. In Proceedings of the 2020 IEEE 28th International Requirements Engineering Conference (RE), Zurich, Switzerland, 31 August–4 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 364–369. [Google Scholar]
- Spanoudakis, N.; Moraitis, P. Modular JADE Agents Design and Implementation Using ASEME. In Proceedings of the 2010 IEEE/WIC/ACM International Conference on Web Intelligence and Intelligent Agent Technology, Washington, DC, USA, 31 August–3 September 2010; Volume 2, pp. 221–228. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Imbalance | Wasted | Imported | MAPE |
|---|---|---|---|---|
| First Slot | ||||
| Lowest Prices | ||||
| V2G | % |
| Method | Imbalance | Wasted | Imported | MAPE |
|---|---|---|---|---|
| NRG-Coin | ||||
| Adaptive Pricing | % |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spanoudakis, N.I.; Akasiadis, C.; Iatrakis, G.; Chalkiadakis, G. Engineering IoT-Based Open MAS for Large-Scale V2G/G2V. Systems 2023, 11, 157. https://doi.org/10.3390/systems11030157
Spanoudakis NI, Akasiadis C, Iatrakis G, Chalkiadakis G. Engineering IoT-Based Open MAS for Large-Scale V2G/G2V. Systems. 2023; 11(3):157. https://doi.org/10.3390/systems11030157
Chicago/Turabian StyleSpanoudakis, Nikolaos I., Charilaos Akasiadis, Georgios Iatrakis, and Georgios Chalkiadakis. 2023. "Engineering IoT-Based Open MAS for Large-Scale V2G/G2V" Systems 11, no. 3: 157. https://doi.org/10.3390/systems11030157