
A New Few-Shot Learning Method of Bacterial Colony Counting Based on the Edge Computing Device


Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Data Preparation and Materials
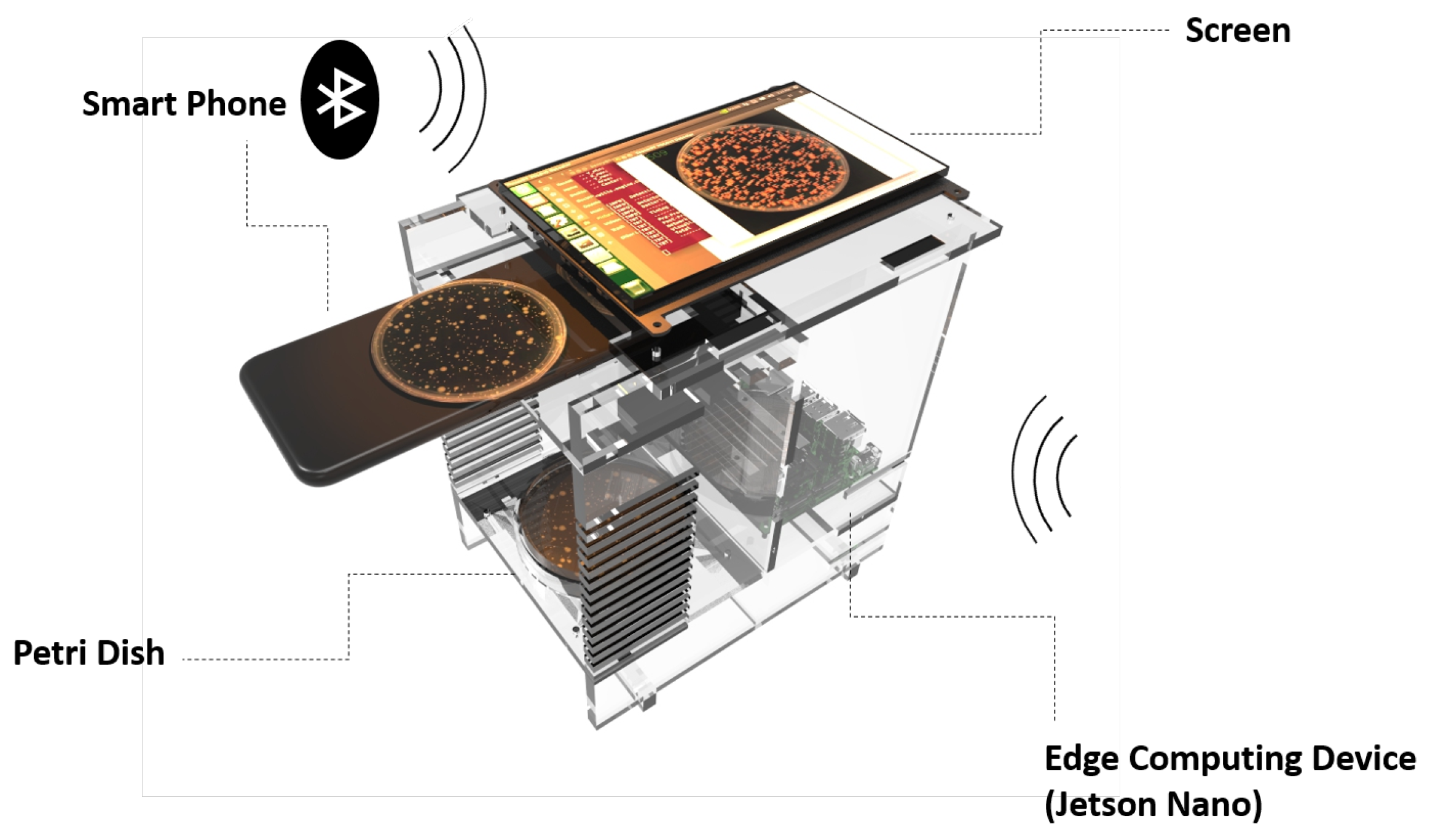
2.2. Equipment
2.3. Dataset
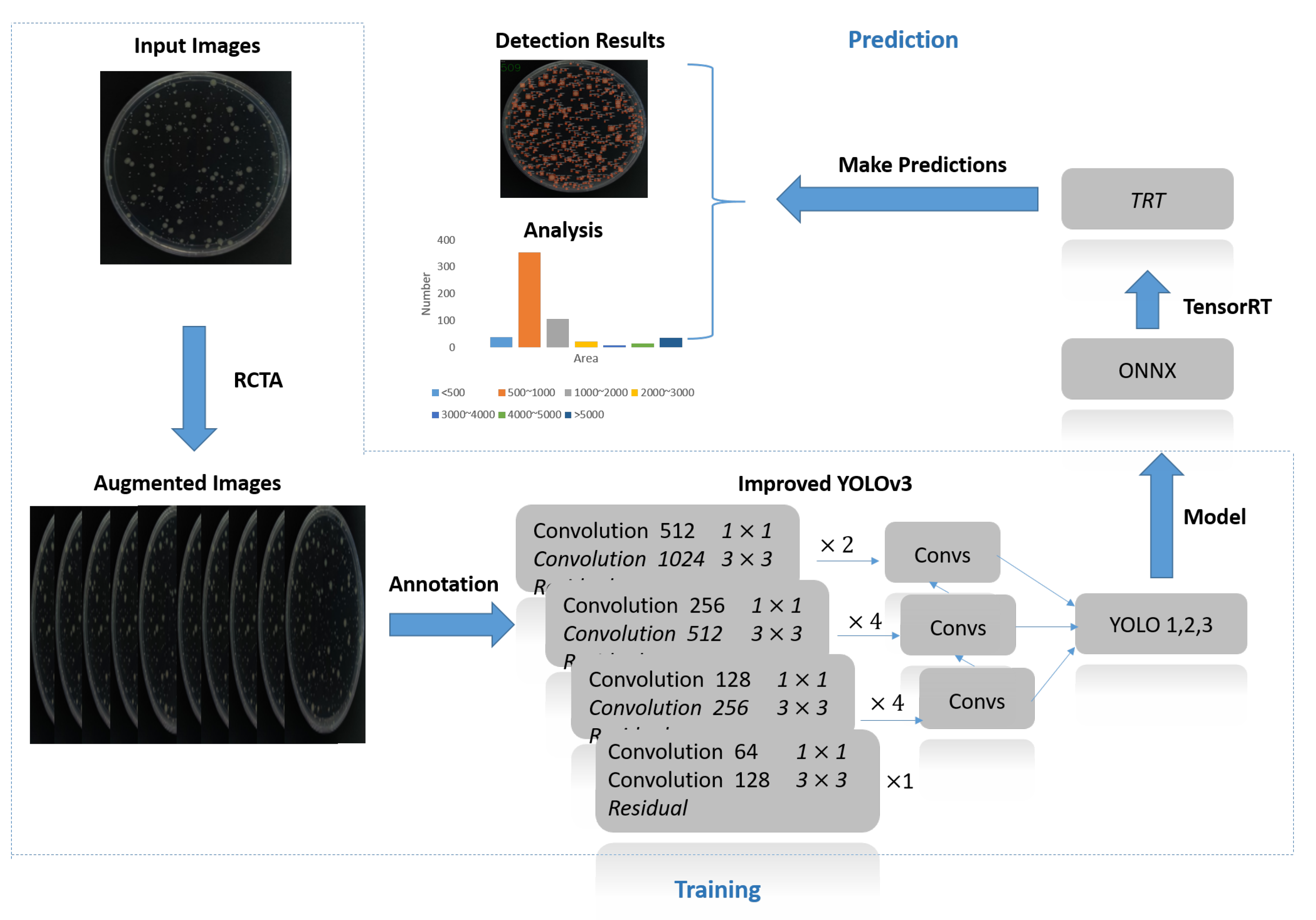
2.4. Method Overview
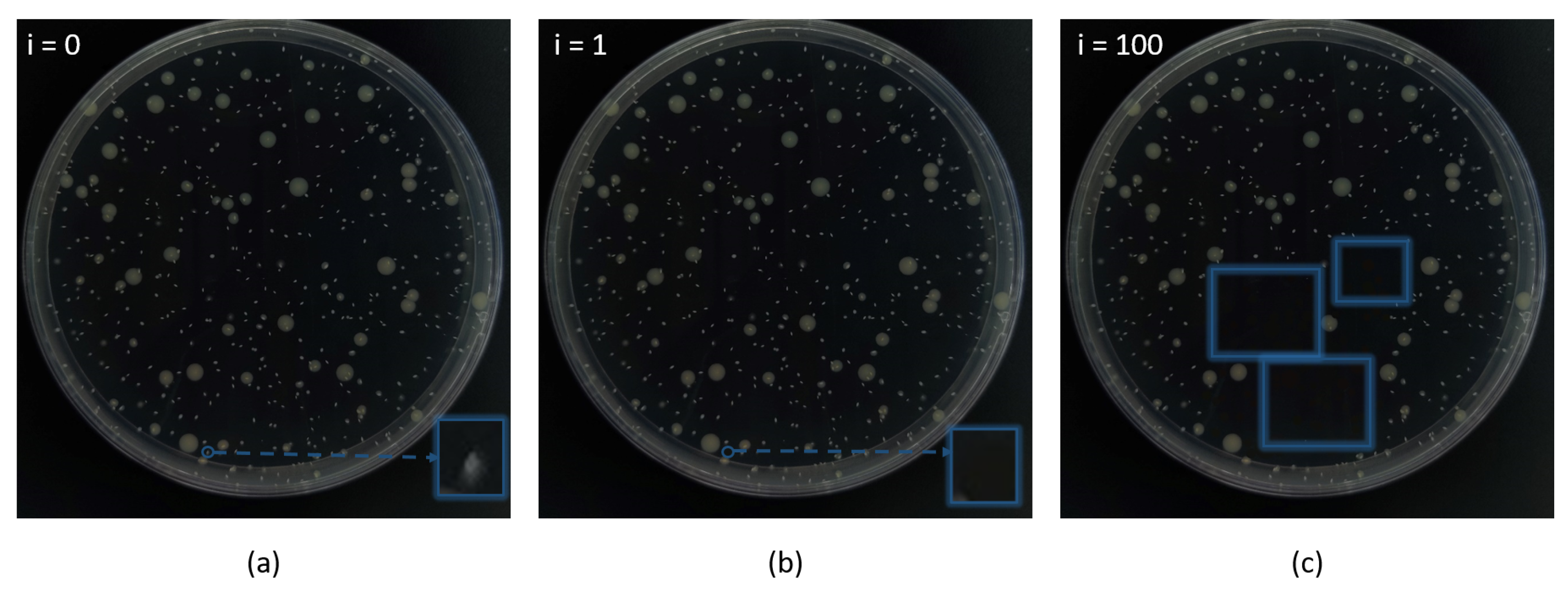
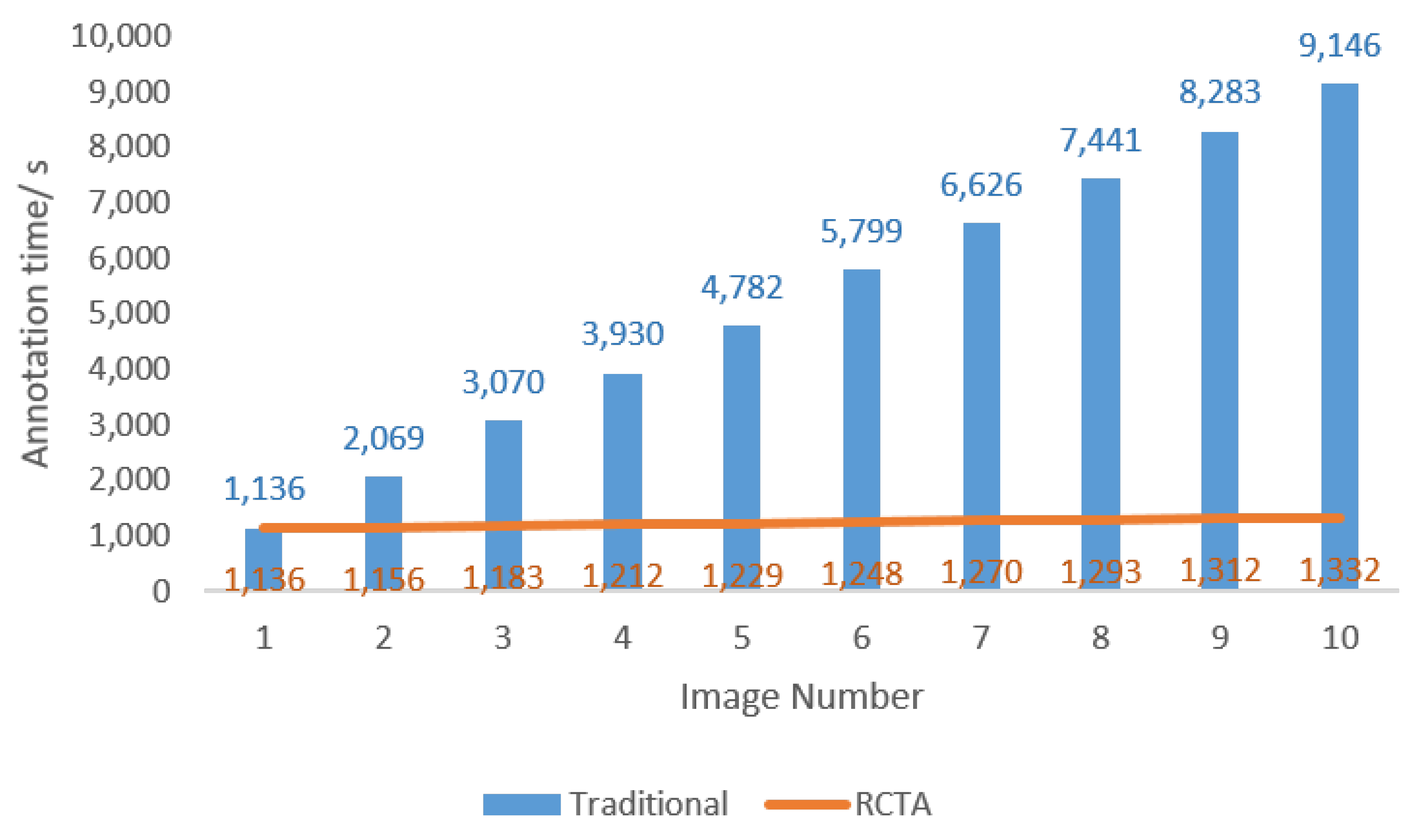
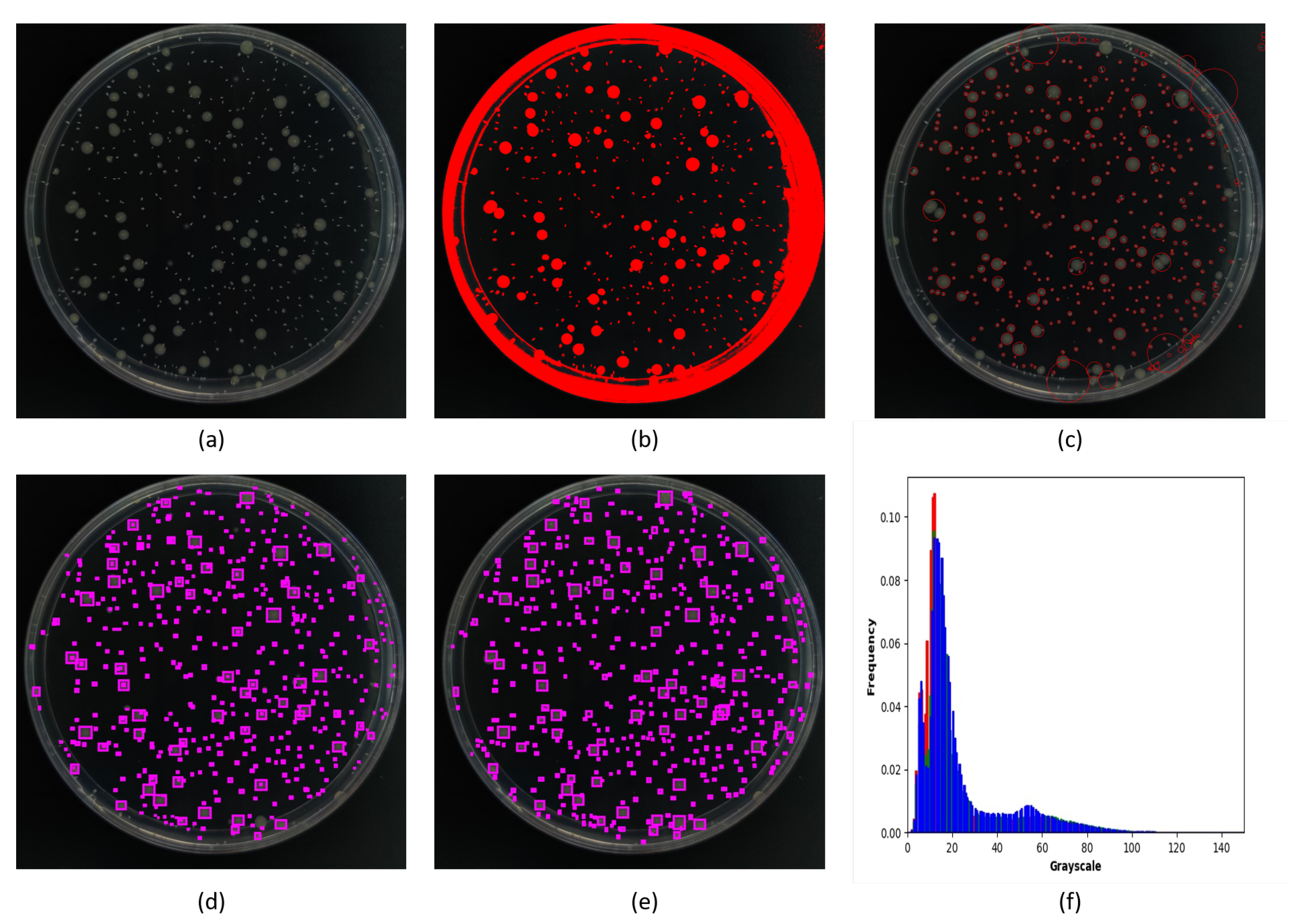
2.5. A New Data Augmentation Method
2.6. Training Strategy
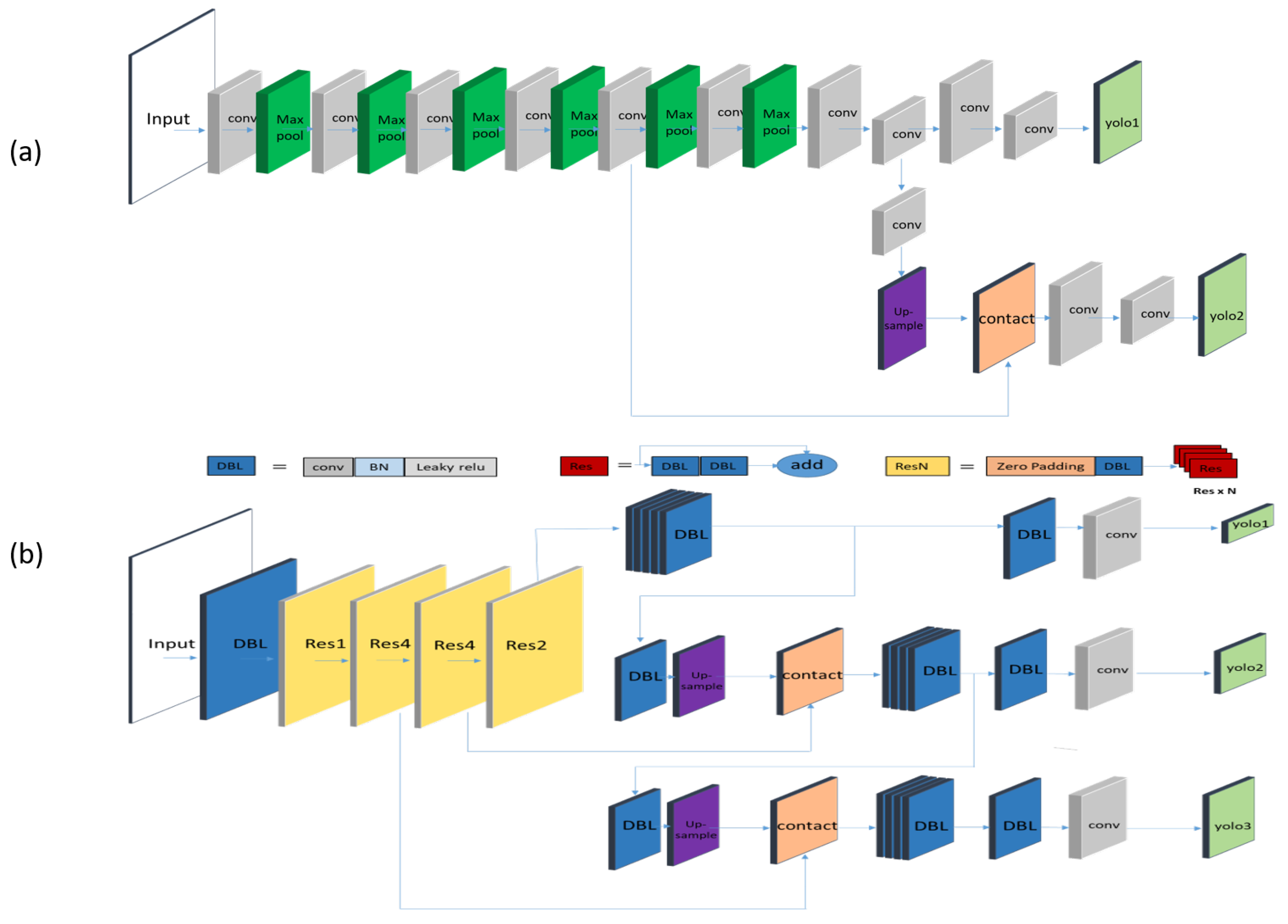
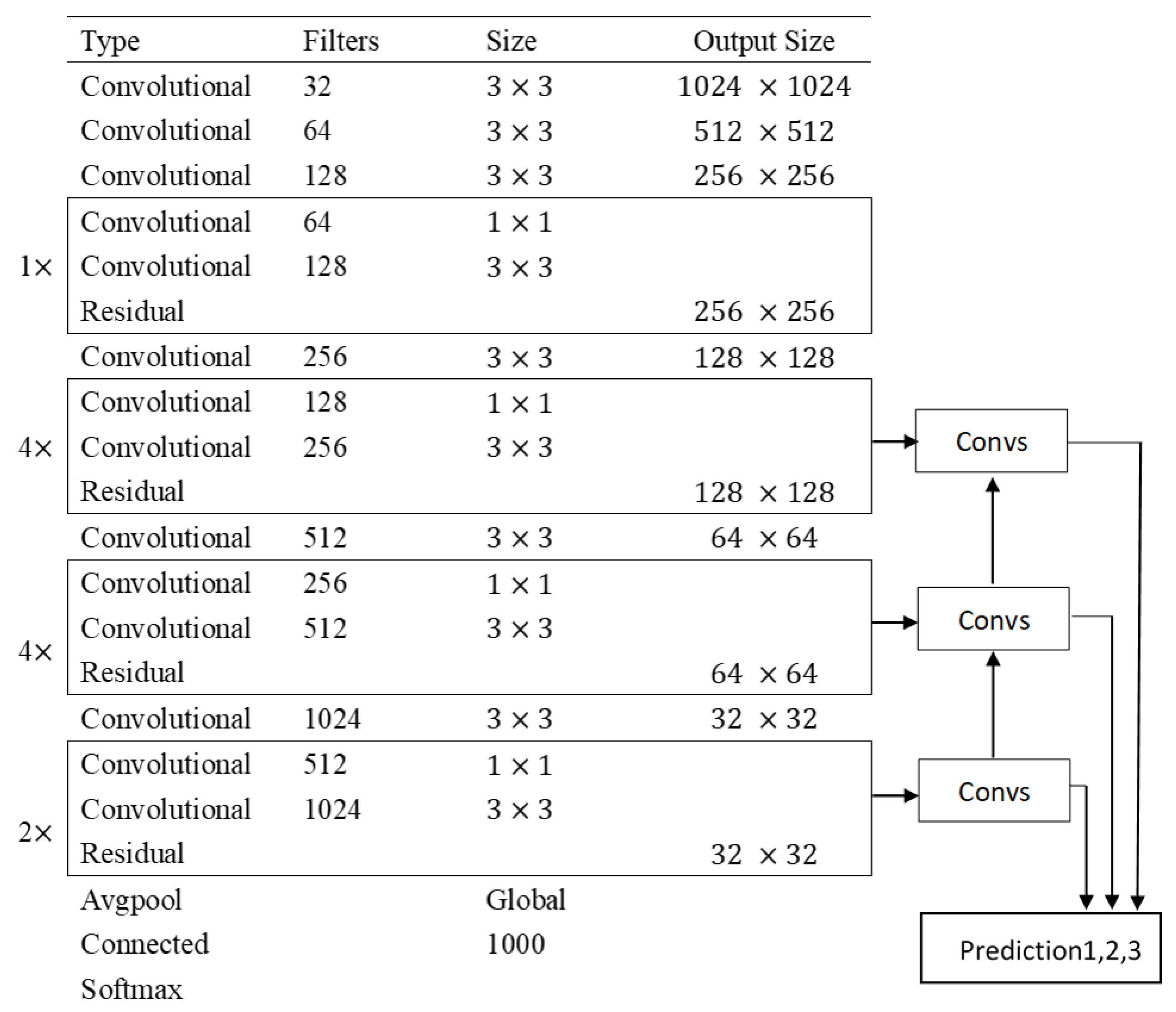
2.7. Structure and Acceleration
2.8. Comparative Methods
3. Results and Discussion
3.1. Results Comparison
3.2. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BCC | Bacterial Colony Counting |
| CNN | Convolutional Neural Network |
| FPN | Feature Pyramid Network |
| RCTA | Random Cover Targets Algorithm |
| YOLOv3 | You Only Look Once version 3 |
| FNR | False Negative Rate |
| TSB | Tryptic Soy Broth |
| PCA | Plate Count Agar |
| FPS | Frame Per Second |
| CFU | Colony-forming units |
References
- Gwimbi, P.; George, M.; Ramphalile, M. Bacterial contamination of drinking water sources in rural villages of Mohale Basin, Lesotho: Exposures through neighbourhood sanitation and hygiene practices. Environ. Health Prev. Med. 2019, 24, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Clarke, M.L.; Burton, R.L.; Hill, A.N.; Litorja, M.; Nahm, M.H.; Hwang, J. Low-cost, high-throughput, automated counting of bacterial colonies. Cytom. Part A 2010, 77, 790–797. [Google Scholar] [CrossRef] [Green Version]
- Luo, J.; Liu, X.; Tian, Q.; Yue, W.; Zeng, J.; Chen, G.; Cai, X. Disposable bioluminescence-based biosensor for detection of bacterial count in food. Anal. Biochem. 2009, 394, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Svebrant, S.; Spörndly, R.; Lindberg, R.H.; Olsen Sköldstam, T.; Larsson, J.; Öhagen, P.; Söderström Lindström, H.; Järhult, J.D. On-Site Pilot Testing of Hospital Wastewater Ozonation to Reduce Pharmaceutical Residues and Antibiotic-Resistant Bacteria. Antibiotics 2021, 10, 684. [Google Scholar] [CrossRef]
- Petrucci, S.; Costa, C.; Broyles, D.; Dikici, E.; Daunert, S.; Deo, S. On-site detection of food and waterborne bacteria–Current technologies, challenges, and future directions. Trends Food Sci. Technol. 2021, 115, 409–421. [Google Scholar] [CrossRef]
- Tara, N.; Arslan, M.; Hussain, Z.; Iqbal, M.; Khan, Q.M.; Afzal, M. On-site performance of floating treatment wetland macrocosms augmented with dye-degrading bacteria for the remediation of textile industry wastewater. J. Clean. Prod. 2019, 217, 541–548. [Google Scholar] [CrossRef]
- Coulthard, M.G.; Kalra, M.; Lambert, H.J.; Nelson, A.; Smith, T.; Perry, J.D. Redefining urinary tract infections by bacterial colony counts. Pediatrics 2010, 125, 335–341. [Google Scholar] [CrossRef] [PubMed]
- Schwenkbier, L.; Pollok, S.; König, S.; Urban, M.; Werres, S.; Cialla-May, D.; Weber, K.; Popp, J. Towards on-site testing of Phytophthora species. Anal. Methods 2015, 7, 211–217. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Gai, Z.; Xu, C.; Guo, F.; Zhang, M.; Xu, S.; Wang, Y.; Hu, D.; Wang, S.; Zhang, L.; et al. Bacterial colonies detecting and counting based on enhanced CNN detection method. In E3S Web of Conferences; EDP Sciences: Les Ulis, France, 2021; Volume 233. [Google Scholar]
- Ferrari, A.; Lombardi, S.; Signoroni, A. Bacterial colony counting with convolutional neural networks in digital microbiology imaging. Pattern Recognit. 2017, 61, 629–640. [Google Scholar] [CrossRef]
- Brugger, S.D.; Baumberger, C.; Jost, M.; Jenni, W.; Brugger, U.; Mühlemann, K. Automated counting of bacterial colony forming units on agar plates. PLoS ONE 2012, 7, e33695. [Google Scholar] [CrossRef] [Green Version]
- Coulthard, M.G. Defining urinary tract infection by bacterial colony counts: A case for 100,000 colonies/mL as the best threshold. Pediatr. Nephrol. 2019, 34, 1639–1649. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Signoroni, A.; Savardi, M.; Pezzoni, M.; Guerrini, F.; Arrigoni, S.; Turra, G. Combining the use of CNN classification and strength-driven compression for the robust identification of bacterial species on hyperspectral culture plate images. IET Comput. Vis. 2018, 12, 941–949. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, K.; Wang, L. Metal Surface Defect Detection Using Modified YOLO. Algorithms 2021, 14, 257. [Google Scholar] [CrossRef]
- Chen, B.; Medini, T.; Farwell, J.; Tai, C.; Shrivastava, A. Slide: In defense of smart algorithms over hardware acceleration for large-scale deep learning systems. Proc. Mach. Learn. Syst. 2020, 2, 291–306. [Google Scholar]
- Huang, L.; Wu, T. Novel neural network application for bacterial colony classification. Theor. Biol. Med Model. 2018, 15, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Turra, G.; Arrigoni, S.; Signoroni, A. CNN-based identification of hyperspectral bacterial signatures for digital microbiology. In International Conference on Image Analysis and Processing; Springer: Berlin/Heidelberg, Germany, 2017; pp. 500–510. [Google Scholar]
- Sodhro, A.H.; Pirbhulal, S.; De Albuquerque, V.H.C. Artificial intelligence-driven mechanism for edge computing-based industrial applications. IEEE Trans. Ind. Inform. 2019, 15, 4235–4243. [Google Scholar] [CrossRef]
- Khalifa, N.E.M.; Taha, M.H.N.; Hassanien, A.E.; Hemedan, A.A. Deep bacteria: Robust deep learning data augmentation design for limited bacterial colony dataset. Int. J. Reason. Based Intell. Syst. 2019, 11, 256–264. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Chen, T.J.; Zheng, W.L.; Liu, C.H.; Huang, I.; Lai, H.H.; Liu, M. Using deep learning with large dataset of microscope images to develop an automated embryo grading system. Fertil. Reprod. 2019, 1, 51–56. [Google Scholar] [CrossRef] [Green Version]
- Christin, S.; Hervet, É.; Lecomte, N. Applications for deep learning in ecology. Methods Ecol. Evol. 2019, 10, 1632–1644. [Google Scholar] [CrossRef]
- Sharma, V.; Dean-Nystrom, E.; Casey, T. Semi-automated fluorogenic PCR assays (TaqMan) forrapid detection of Escherichia coli O157: H7 and other shiga toxigenic E. coli. Mol. Cell. Probes 1999, 13, 291–302. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jin, B.; Wang, S.; Lin, M.; Jin, Y.; Zhang, S.; Cui, X.; Gong, Y.; Li, A.; Xu, F.; Lu, T.J. Upconversion nanoparticles based FRET aptasensor for rapid and ultrasenstive bacteria detection. Biosens. Bioelectron. 2017, 90, 525–533. [Google Scholar] [CrossRef]
- Brito, N.M.R.D.; Lourenço, F.R. Rapid identification of microbial contaminants in pharmaceutical products using a PCA/LDA-based FTIR-ATR method. Braz. J. Pharm. Sci. 2021, 57, e18899. [Google Scholar] [CrossRef]
- Wang, H.; Koydemir, H.C.; Qiu, Y.; Bai, B.; Zhang, Y.; Jin, Y.; Tok, S.; Yilmaz, E.C.; Gumustekin, E.; Rivenson, Y.; et al. Early detection and classification of live bacteria using time-lapse coherent imaging and deep learning. Light Sci. Appl. 2020, 9, 1–17. [Google Scholar] [CrossRef]
- Guerini, M.N.; Arthur, T.M.; Shackelford, S.D.; Koohmaraie, M. Evaluation of Escherichia coli O157: H7 growth media for use in test-and-hold procedures for ground beef processing. J. Food Prot. 2006, 69, 1007–1011. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- 2-2010, G. National Food Safety Standard Food Microbiological Examination: Aerobic Plate Count. 2010. Available online: http://www.puntofocal.gov.ar/doc/nchn199.pdf (accessed on 1 December 2021).
- Herrera, P.; Burghardt, R.; Phillips, T. Adsorption of Salmonella enteritidis by cetylpyridinium-exchanged montmorillonite clays. Vet. Microbiol. 2000, 74, 259–272. [Google Scholar] [CrossRef]
- Sung, F.; Yang, Y.; Zhang, L.; Xiang, T.; Torr, P.H.; Hospedales, T.M. Learning to compare: Relation network for few-shot learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 1199–1208. [Google Scholar]
- Zhu, W.; Zeng, N.; Wang, N. Sensitivity, specificity, accuracy, associated confidence interval and ROC analysis with practical SAS implementations. NESUG Proc. Health Care Life Sci. Balt. Md. 2010, 19, 67. [Google Scholar]
- Wen, M.; Cong, P.; Zhang, Z.; Lu, H.; Li, T. DeepMirTar: A deep-learning approach for predicting human miRNA targets. Bioinformatics 2018, 34, 3781–3787. [Google Scholar] [CrossRef]
- Berman, D.S.; Buczak, A.L.; Chavis, J.S.; Corbett, C.L. A survey of deep learning methods for cyber security. Information 2019, 10, 122. [Google Scholar] [CrossRef] [Green Version]
- Beznik, T.; Smyth, P.; de Lannoy, G.; Lee, J.A. Deep learning to detect bacterial colonies for the production of vaccines. Neurocomputing 2022, 470, 427–431. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, H.; Ye, T.; Juhas, M. Deep Learning for Imaging and Detection of Microorganisms. Trends Microbiol. 2021, 29, 569–572. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | TP | FP | FN | ACC | TPR | FNR | DT(s) |
|---|---|---|---|---|---|---|---|
| Human reference | 4898 | 0 | 0 | 257.84 | |||
| Simple threshold | 3605 | 77,484 | 1293 | 0.17 | |||
| Comprehensive threshold | 3327 | 279 | 1571 | 0.26 | |||
| Tiny YOLOv3 | 4489 | 321 | 409 | 0.50 | |||
| Improved YOLOv3 | 4826 | 58 | 72 | 0.89 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Zhou, Z.; Cao, W.; Qi, X.; Xu, C.; Wen, W. A New Few-Shot Learning Method of Bacterial Colony Counting Based on the Edge Computing Device. Biology 2022, 11, 156. https://doi.org/10.3390/biology11020156
Zhang B, Zhou Z, Cao W, Qi X, Xu C, Wen W. A New Few-Shot Learning Method of Bacterial Colony Counting Based on the Edge Computing Device. Biology. 2022; 11(2):156. https://doi.org/10.3390/biology11020156
Chicago/Turabian StyleZhang, Beini, Zhentao Zhou, Wenbin Cao, Xirui Qi, Chen Xu, and Weijia Wen. 2022. "A New Few-Shot Learning Method of Bacterial Colony Counting Based on the Edge Computing Device" Biology 11, no. 2: 156. https://doi.org/10.3390/biology11020156