
Piezo-Resistive Flexible Pressure Sensor by Blade-Coating Graphene–Silver Nanosheet–Polymer Nanocomposite

 ,
,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Preparation of Sensitive Layer Material
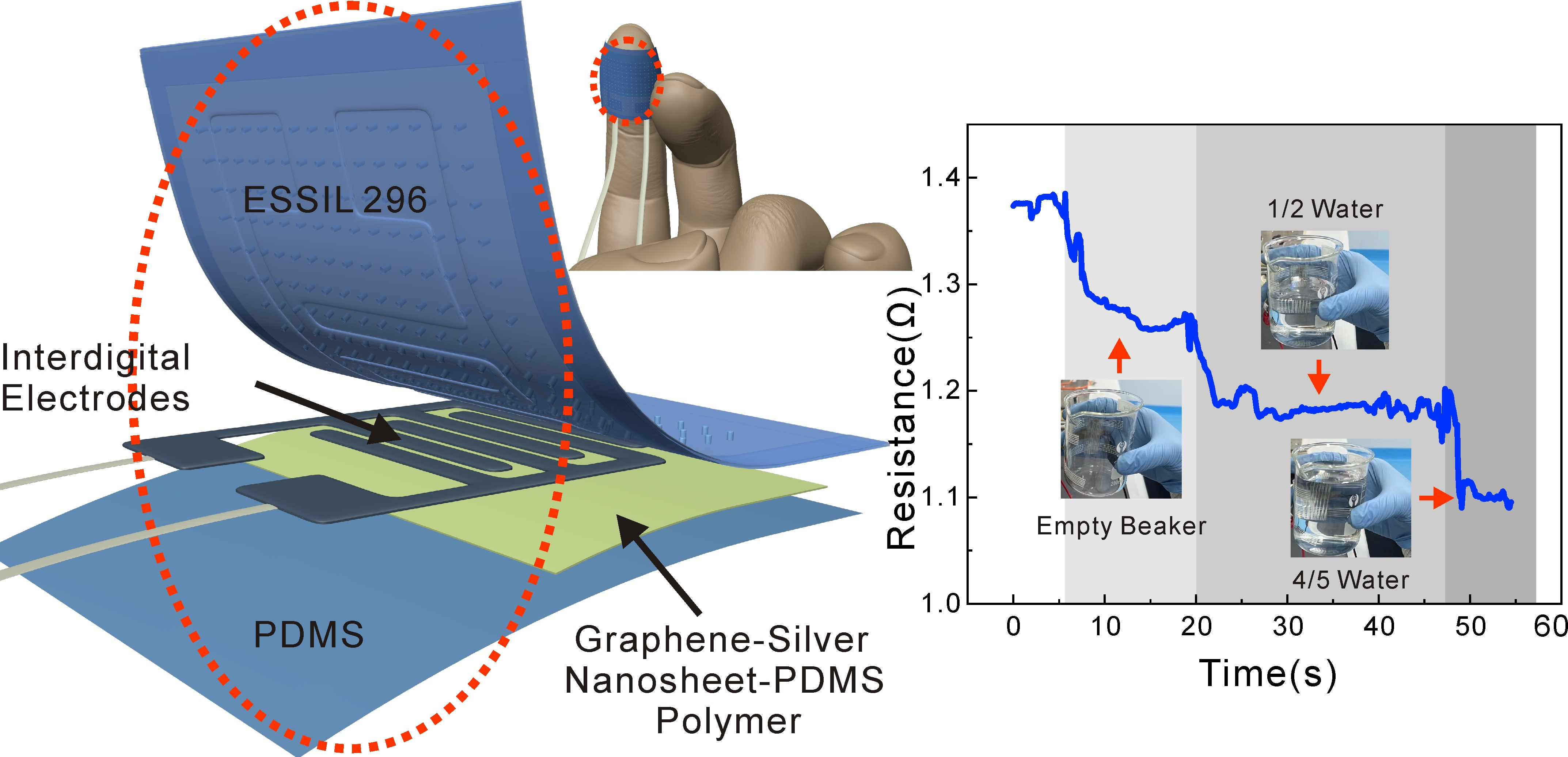
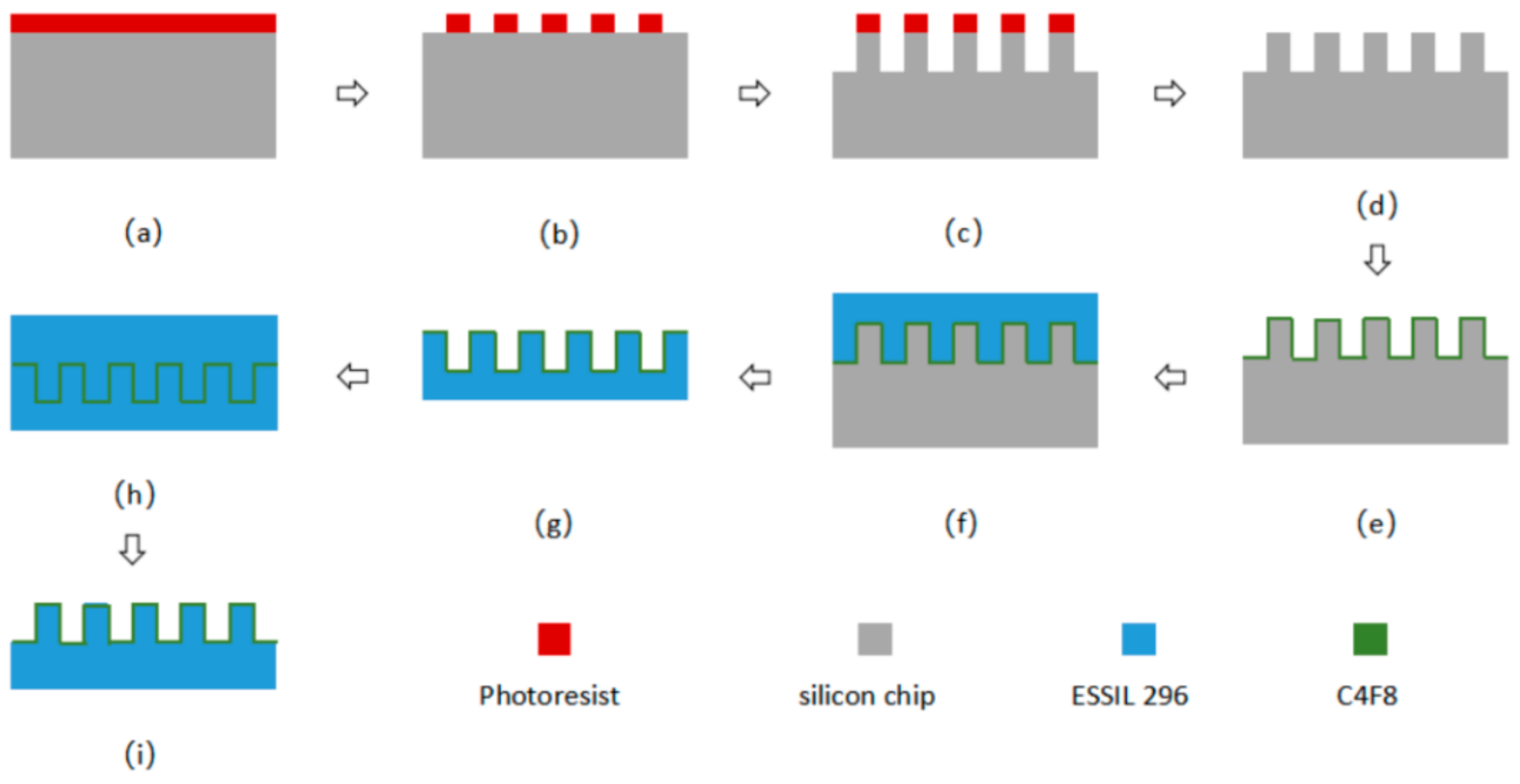
2.3. Fabrication Process of Flexible Pressure Sensor
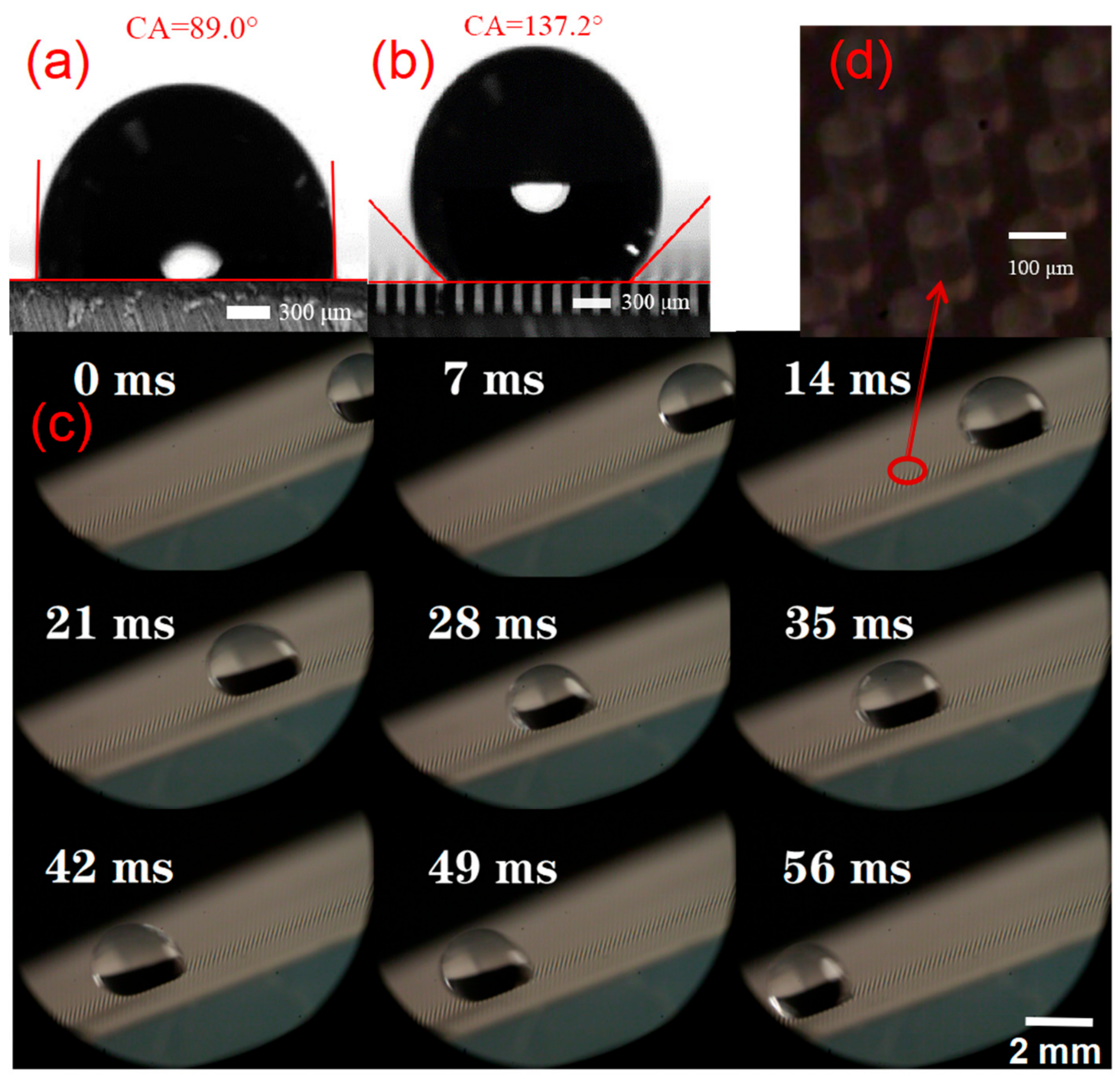
2.4. Morphology Characterization and Surface Wettability Test
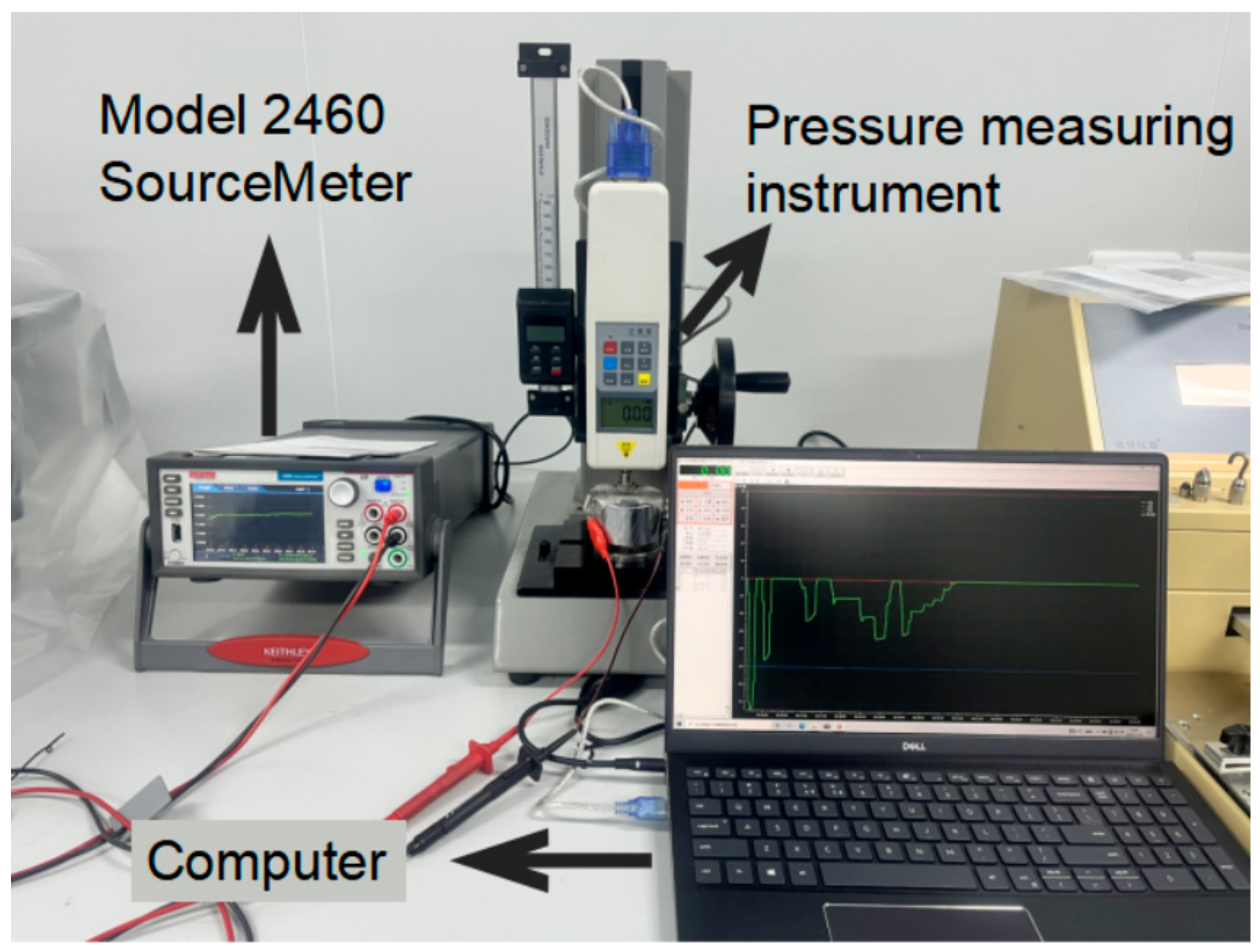
2.5. Performance Test of the Flexible Sensor
3. Results
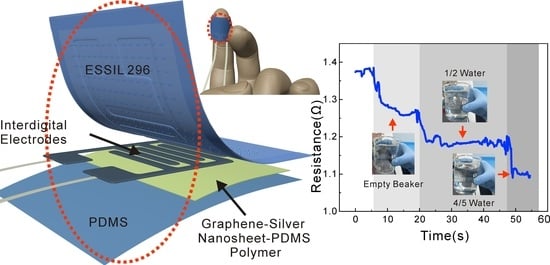
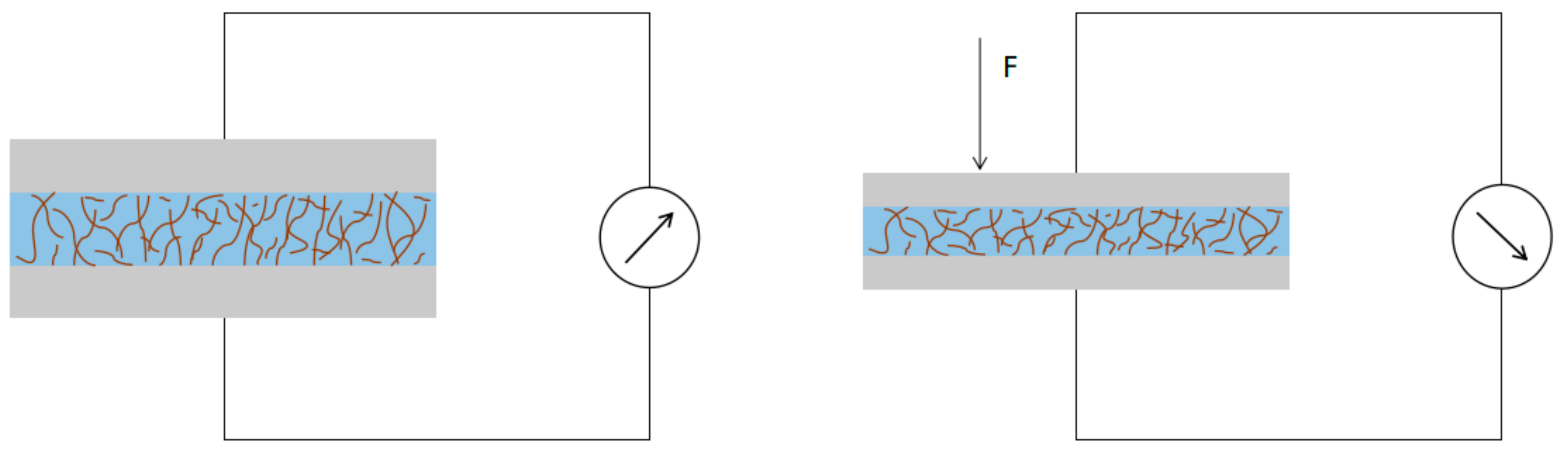
3.1. Working Mechanism of the Sensor
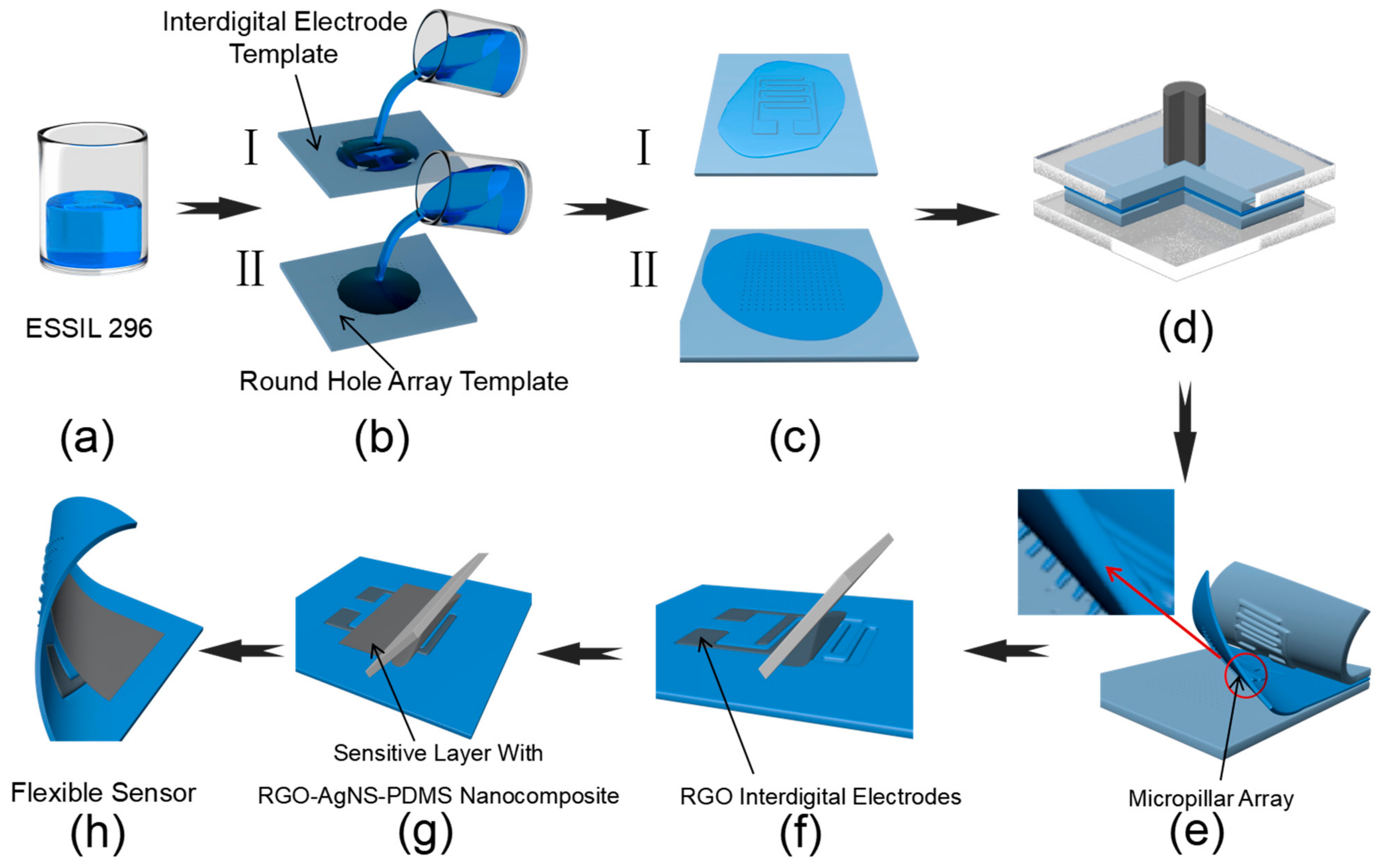
3.2. Dispersion of the Functional Layer
3.3. Morphology of the Sensor Substrate
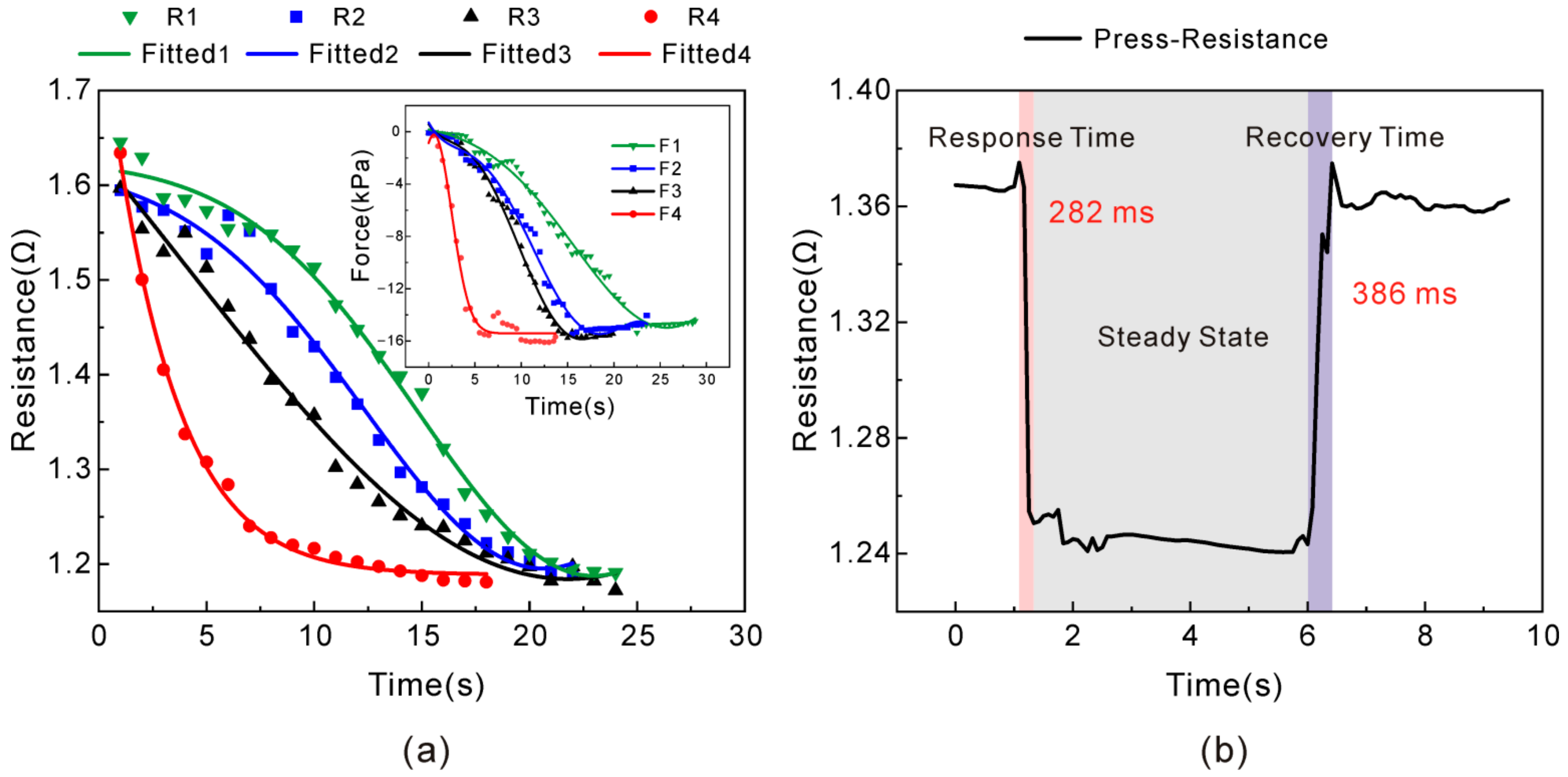
3.4. Response Behavior of the Flexible Sensor
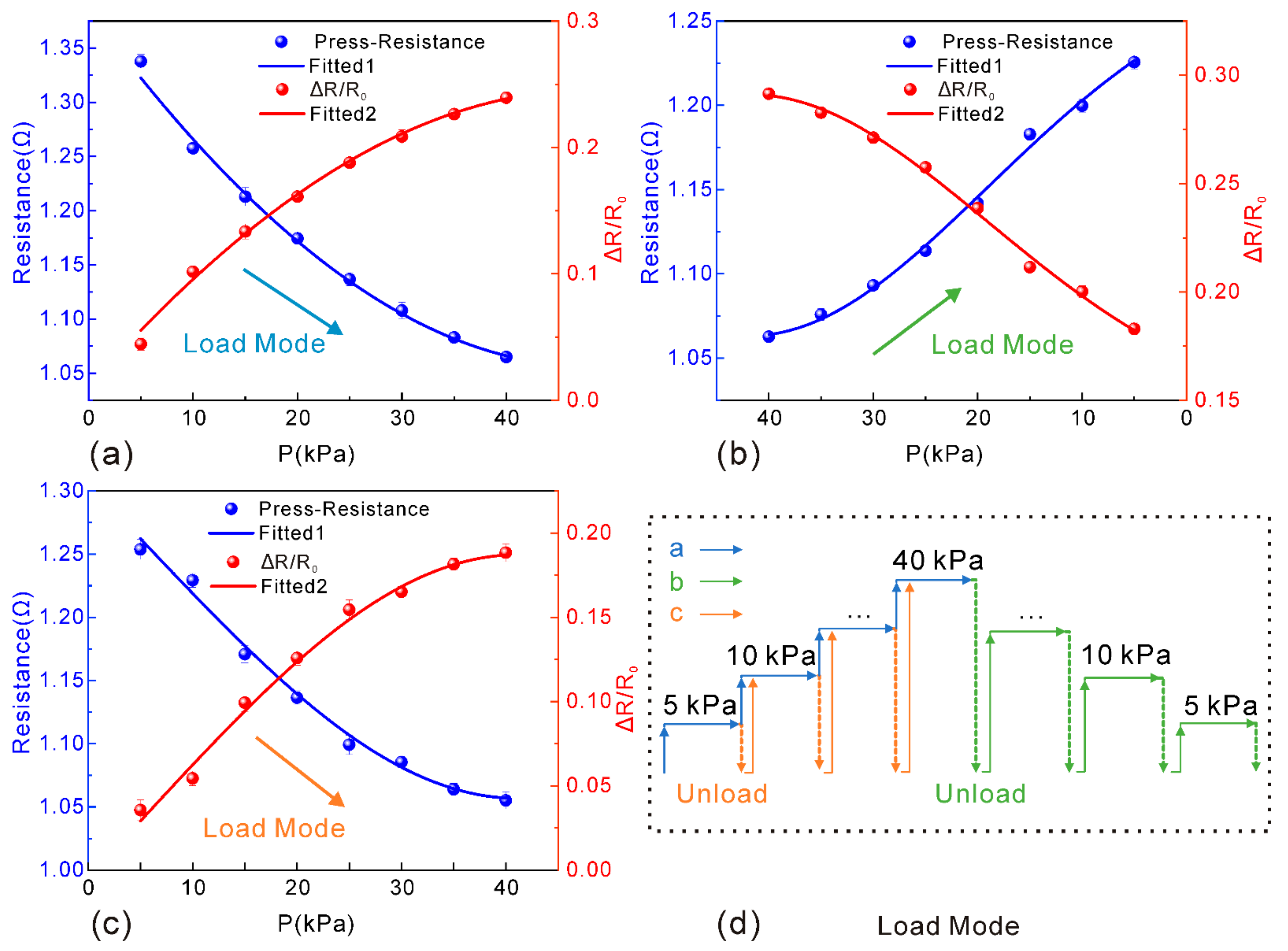
3.5. Sensitivity and Stability Test of the Sensor
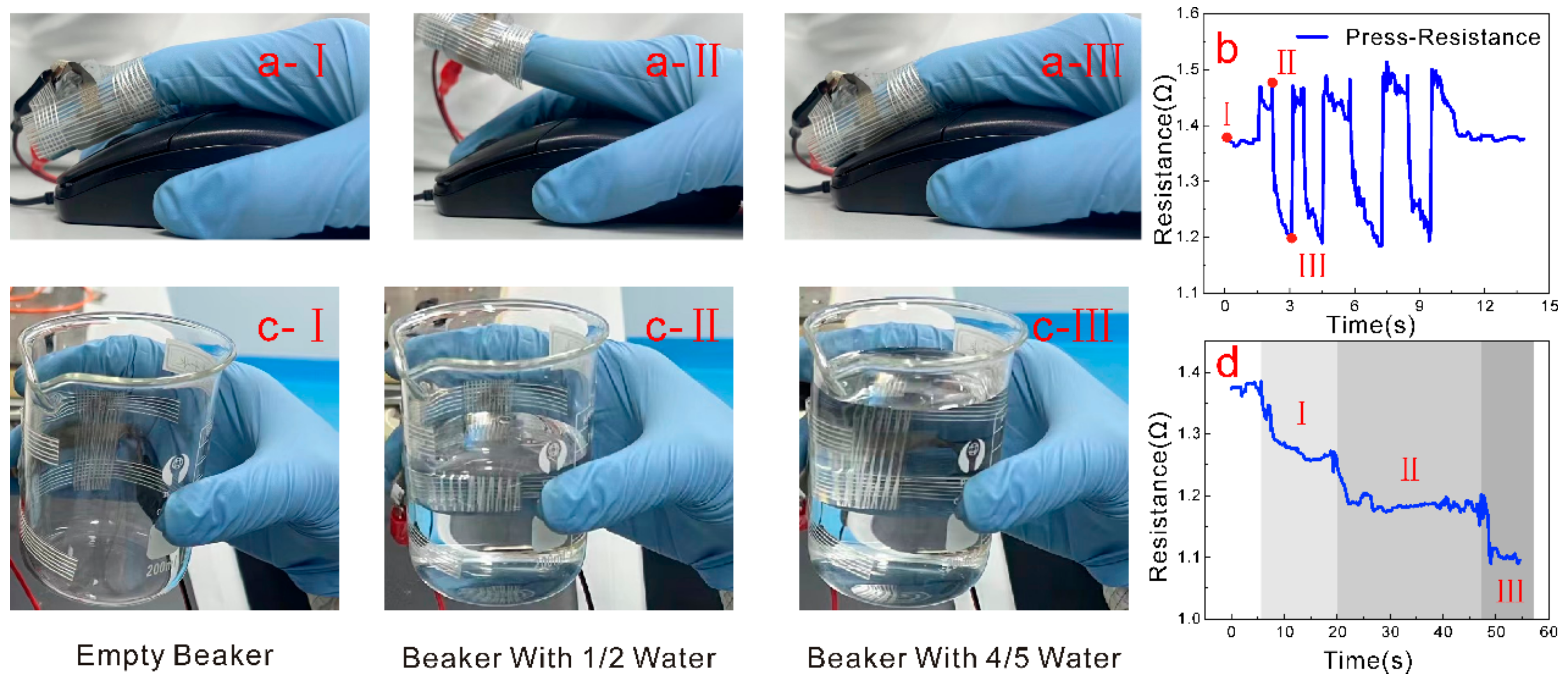
3.6. Application
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A



References
- Pinskier, J.; Howard, D. From Bioinspiration to Computer Generation: Developments in Autonomous Soft Robot Design. Adv. Intell. Syst. 2022, 4, 2100086. [Google Scholar] [CrossRef]
- Deng, W.; Yang, T.; Jin, L.; Yan, C.; Huang, H.; Chu, X.; Wang, Z.; Xiong, D.; Tian, G.; Gao, Y.; et al. Cowpea-structured PVDF/ZnO Nanofibers Based Flexible Self-powered Piezoelectric Bending Motion Sensor Towards Remote Control of Gestures. Nano Energy 2019, 55, 516–525. [Google Scholar] [CrossRef]
- Han, D.; Lim, J. Design and Implementation of Smart Home Energy Management Systems Based on Zigbee. IEEE Trans. Consum. Electr. 2010, 56, 1417–1425. [Google Scholar] [CrossRef]
- Huimin, L.; Yujie, L.; Yun, L.; Seiichi, S.; Hyoungseop, K. Highly Accurate Energy-Conserving Flexible Touch Sensors. Sens. Mater. 2017, 29, 611–617. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Wang, J.; Zhang, Y.; Liu, H.; Chen, Z.; Lu, Y.; Dai, Y.; Xu, L.; Gao, S. Flexible and Wearable EMG and PSD Sensors Enabled Locomotion Mode Recognition for IoHT-Based In-Home Rehabilitation. IEEE Sens. J. 2021, 21, 26311–26319. [Google Scholar] [CrossRef]
- Pierre Claver, U.; Zhao, G. Recent Progress in Flexible Pressure Sensors Based Electronic Skin. Adv. Eng. Mater. 2021, 23, 2001187. [Google Scholar] [CrossRef]
- Umapathi, R.; Raju, C.V.; Ghoreishian, S.M.; Rani, G.M.; Kumar, K.; Oh, M.; Park, J.P.; Huh, Y.S. Recent advances in the use of graphitic carbon nitride-based composites for the electrochemical detection of hazardous contaminants. Coord. Chem. Rev. 2022, 470, 214708. [Google Scholar] [CrossRef]
- Gokana, M.R.; Wu, C.; Motora, K.G.; Qi, J.Y.; Yen, W. Effects of patterned electrode on near infrared light-triggered cesium tungsten bronze/poly(vinylidene)fluoride nanocomposite-based pyroelectric nanogenerator for energy harvesting. J. Power Sources 2022, 536, 231524. [Google Scholar] [CrossRef]
- Kim, J.; Lee, M.; Shim, H.J.; Ghaffari, R.; Cho, H.R.; Son, D.; Jung, Y.H.; Soh, M.; Choi, C.; Jung, S.; et al. Stretchable silicon nanoribbon electronics for skin prosthesis. Nat. Commun. 2014, 5, 5747. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Wei, Y.; Qiu, Y. Advanced Flexible Skin-Like Pressure and Strain Sensors for Human Health Monitoring. Micromachines 2021, 12, 695. [Google Scholar] [CrossRef]
- Liu, G.; Tan, Q.; Kou, H.; Zhang, L.; Wang, J.; Lv, W.; Dong, H.; Xiong, J. A Flexible Temperature Sensor Based on Reduced Graphene Oxide for Robot Skin Used in Internet of Things. Sensors 2018, 18, 1400. [Google Scholar] [CrossRef] [Green Version]
- Liang, R.; Luo, A.; Zhang, Z.; Li, Z.; Han, C.; Wu, W. Research Progress of Graphene-Based Flexible Humidity Sensor. Sensors 2020, 20, 5601. [Google Scholar] [CrossRef]
- Heo, J.S.; Hossain, M.F.; Kim, I. Challenges in Design and Fabrication of Flexible/Stretchable Carbon- and Textile-Based Wearable Sensors for Health Monitoring: A Critical Review. Sensors 2020, 20, 3927. [Google Scholar] [CrossRef]
- Zeng, X.; Hu, Y. Sensation and Perception of a Bioinspired Flexible Smart Sensor System. ACS Nano 2021, 15, 9238–9243. [Google Scholar] [CrossRef]
- Liu, F.; Dai, S.; Cao, J.; Zhang, Z.; Cheng, G.; Ding, J. CNTs based capacitive stretchable pressure sensor with stable performance. Sens. Actuators A Phys. 2022, 343, 113672. [Google Scholar] [CrossRef]
- Yang, H.; Xue, T.; Li, F.; Liu, W.; Song, Y. Graphene: Diversified Flexible 2D Material for Wearable Vital Signs Monitoring. Adv. Mater. Technol. 2018, 4, 1800574. [Google Scholar] [CrossRef]
- Xu, M.; Gao, Y.; Yu, G.; Lu, C.; Tan, J.; Xuan, F. Flexible Pressure Sensor Using Carbon Nanotube-wrapped Polydimethylsiloxane Microspheres for Tactile sensing. Sens. Actuators A Phys. 2018, 284, 260–265. [Google Scholar] [CrossRef]
- Aguilar-Bolados, H.; Yazdani-Pedram, M.; Contreras-Cid, A.; López-Manchado, M.A.; May-Pat, A.; Avilés, F. Influence of the Morphology of Carbon Nanostructures on the Piezoresistivity of Hybrid Natural Rubber Nanocomposites. Compos. Part B Eng. 2017, 109, 147–154. [Google Scholar] [CrossRef]
- Liao, H.; Guo, X.; Wan, P.; Yu, G. Conductive MXene Nanocomposite Organohydrogel for Flexible, Healable, Low-Temperature Tolerant Strain Sensors. Adv. Funct. Mater. 2019, 29, 1904507. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, L.; Li, Z.; Wang, F.; Chen, X.; Liu, J.; Song, C.; Yao, J. Facile Fabrication of Highly Sensitive and Durable Cotton Fabric-based Pressure Sensors for Motion and Pulse Monitoring. J. Mater. Chem. C 2021, 9, 12605–12614. [Google Scholar] [CrossRef]
- He, Q.; Zhang, W.; Tianyu, S.; Zheng, G.; Zihao, D.D.Z.; Yonggang, J. Flexible Conductivity-temperature-depth-strain (CTDS) Sensor Based on a CNT/PDMS Bottom Electrode for Underwater sensing. Flex. Print. Electron. 2022, 7, 045002. [Google Scholar] [CrossRef]
- Wang, X.; Yu, J.; Cui, Y.; Li, W. Research Progress of Flexible Wearable Pressure Sensors. Sens. Actuators A Phys. 2021, 330, 112838. [Google Scholar] [CrossRef]
- Chen, W.; Yan, X. Progress in achieving high-performance piezoresistive and capacitive flexible pressure sensors: A review. J. Mater. Sci. Technol. 2020, 43, 175–188. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, B.; Jiang, J.; Wu, K.; Guo, C.F.; Wu, Z. High-Fidelity Conformal Printing of 3D Liquid Alloy Circuits for Soft Electronics. ACS Appl. Mater. Interfaces 2019, 11, 7148–7156. [Google Scholar] [CrossRef] [PubMed]
- Yan, Z.; Pan, T.; Wang, D.; Li, J.; Jin, L.; Huang, L.; Jiang, J.; Qi, Z.; Zhang, H.; Gao, M.; et al. Stretchable Micromotion Sensor with Enhanced Sensitivity Using Serpentine Layout. ACS Appl. Mater. Interfaces 2019, 11, 12261–12271. [Google Scholar] [CrossRef]
- Gao, Y.; Xiao, T.; Li, Q.; Chen, Y.; Qiu, X.; Liu, J.; Bian, Y.; Xuan, F. Flexible Microstructured Pressure Sensors: Design, Fabrication and Applications. Nanotechnology 2022, 33, 32202. [Google Scholar] [CrossRef]
- Ge, G.; Wang, Q.; Zhang, Y.Z.; Alshareef, H.N.; Dong, X. 3D Printing of Hydrogels for Stretchable Ionotronic Devices. Adv. Funct. Mater. 2021, 31, 2107437. [Google Scholar] [CrossRef]
- Yang, H.; Yuan, L.; Yao, X.; Fang, D. Piezoresistive Response of Graphene Rubber Composites Considering the Tunneling Effect. J. Mech. Phys. Solids 2020, 139, 103943. [Google Scholar] [CrossRef]
- Zhao, D.; Cui, J.; Dai, X.; Liu, S.; Dong, L. Magneto-piezoresistive Characteristics of Graphene/room Temperature Vulcanized Silicon Rubber-silicon Rubber Magnetorheological Elastomer. J. Appl. Polym. Sci. 2021, 138, 50051. [Google Scholar] [CrossRef]
- Tran, M.T.; Tung, T.T.; Sachan, A.; Losic, D.; Castro, M.; Feller, J.F. 3D Sprayed Polyurethane Functionalized Graphene / carbon Nanotubes Hybrid Architectures to Enhance the Piezo-resistive Response of Quantum Resistive Pressure Sensors. Carbon 2020, 168, 564–579. [Google Scholar] [CrossRef]
- Li, Z.; Chen, X.; Chen, X.; Guo, J.; Liu, L.; Zhu, G.; Militky, J.; Yao, J. Interfacial-Modified Graphene/Cotton Fabric for Durable Pressure Sensor via Electrostatic Self-Assembly. ACS Appl. Polym. Mater. 2022, 4, 8604–8612. [Google Scholar] [CrossRef]
- Jing, Z.; Zhang, Q.; Cheng, Y.; Ji, C.; Zhao, D.; Liu, Y.; Jia, W.; Pan, S.; Sang, S. Highly Sensitive, Reliable and Flexible Piezoresistive Pressure Sensors Based on Graphene-PDMS @ sponge. J. Micromech. Microeng. 2020, 30, 85012. [Google Scholar] [CrossRef]
- Xue, Y.; Yuan, H.; Su, W.; Shi, Y.; Duan, H. Enhanced Load-carrying Capacity of Hairy Surfaces Floating on Water. Proc. Math. Phys. Eng. Sci. 2014, 470, 20130832. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Composition of Materials | Performance |
|---|---|---|
| 1 | RGO, PDMS | Good dispersion, poor conductivity |
| 2 | RGO, ESSIL 296 | Poor dispersion, poor conductivity |
| 3 | AgNS, PDMS | Unstable and poor dispersion, good conductivity |
| 4 | AgNS, ESSIL 296 | Poor dispersion, poor conductivity |
| 5 * | RGO, AgNS, PDMS | Stable and good conductivity, good dispersion |
| 6 | RGO, AgNS, ESSIL 296 | Poor dispersion, poor conductivity |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, Z.; Li, X.; Zhao, X.; Wang, X.; Shen, J.; Wei, H.; Zhu, X. Piezo-Resistive Flexible Pressure Sensor by Blade-Coating Graphene–Silver Nanosheet–Polymer Nanocomposite. Nanomaterials 2023, 13, 4. https://doi.org/10.3390/nano13010004
Kang Z, Li X, Zhao X, Wang X, Shen J, Wei H, Zhu X. Piezo-Resistive Flexible Pressure Sensor by Blade-Coating Graphene–Silver Nanosheet–Polymer Nanocomposite. Nanomaterials. 2023; 13(1):4. https://doi.org/10.3390/nano13010004
Chicago/Turabian StyleKang, Zheng, Xiangmeng Li, Xiaodong Zhao, Xiaoqiang Wang, Jian Shen, Huifen Wei, and Xijing Zhu. 2023. "Piezo-Resistive Flexible Pressure Sensor by Blade-Coating Graphene–Silver Nanosheet–Polymer Nanocomposite" Nanomaterials 13, no. 1: 4. https://doi.org/10.3390/nano13010004