

Architecture-Oriented Agent-Based Simulations and Machine Learning Solution: The Case of Tsunami Emergency Analysis for Local Decision Makers

 ,
,  ,
,  , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Tsunami Warning Systems Architectures
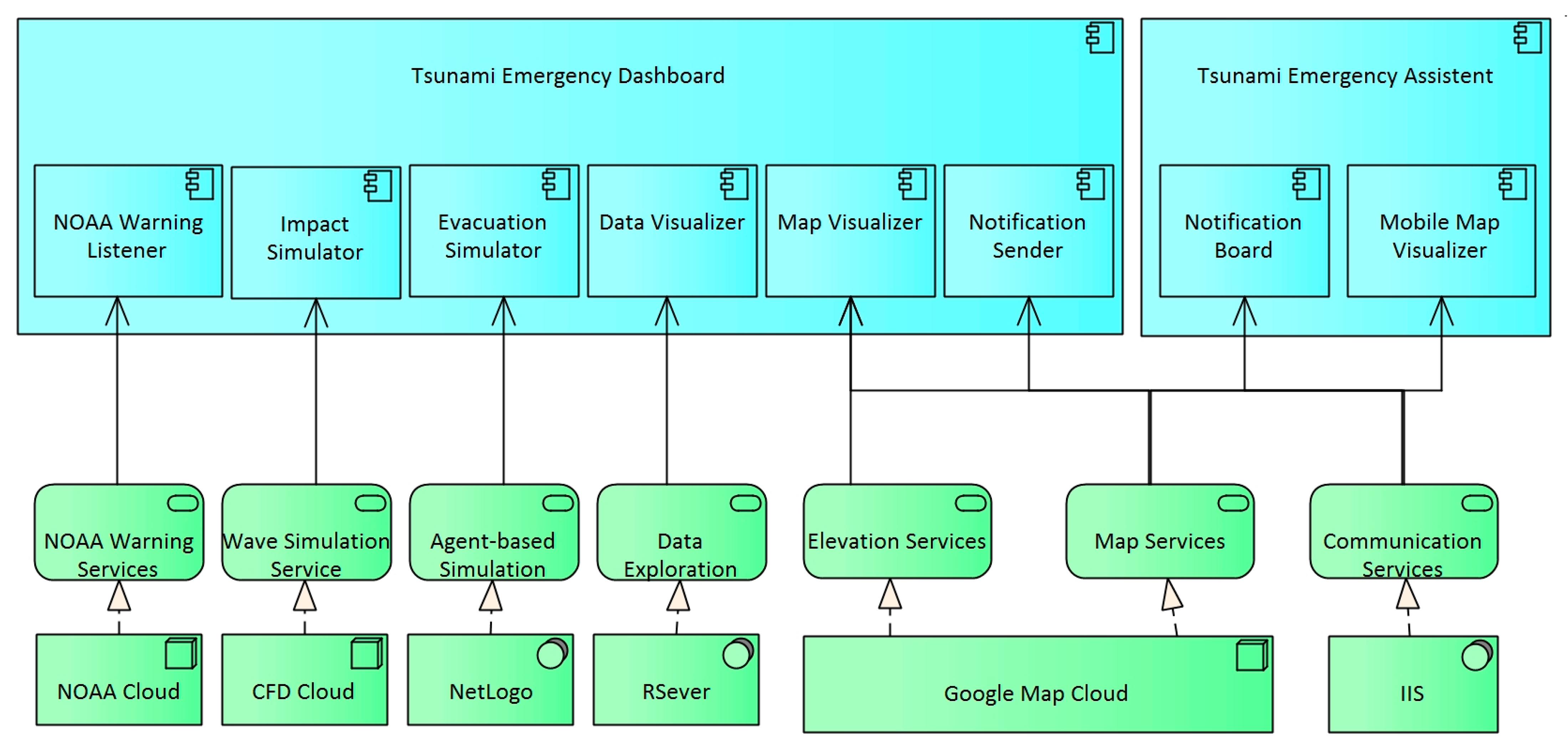
3. Tsunami Emergency Solution Architecture
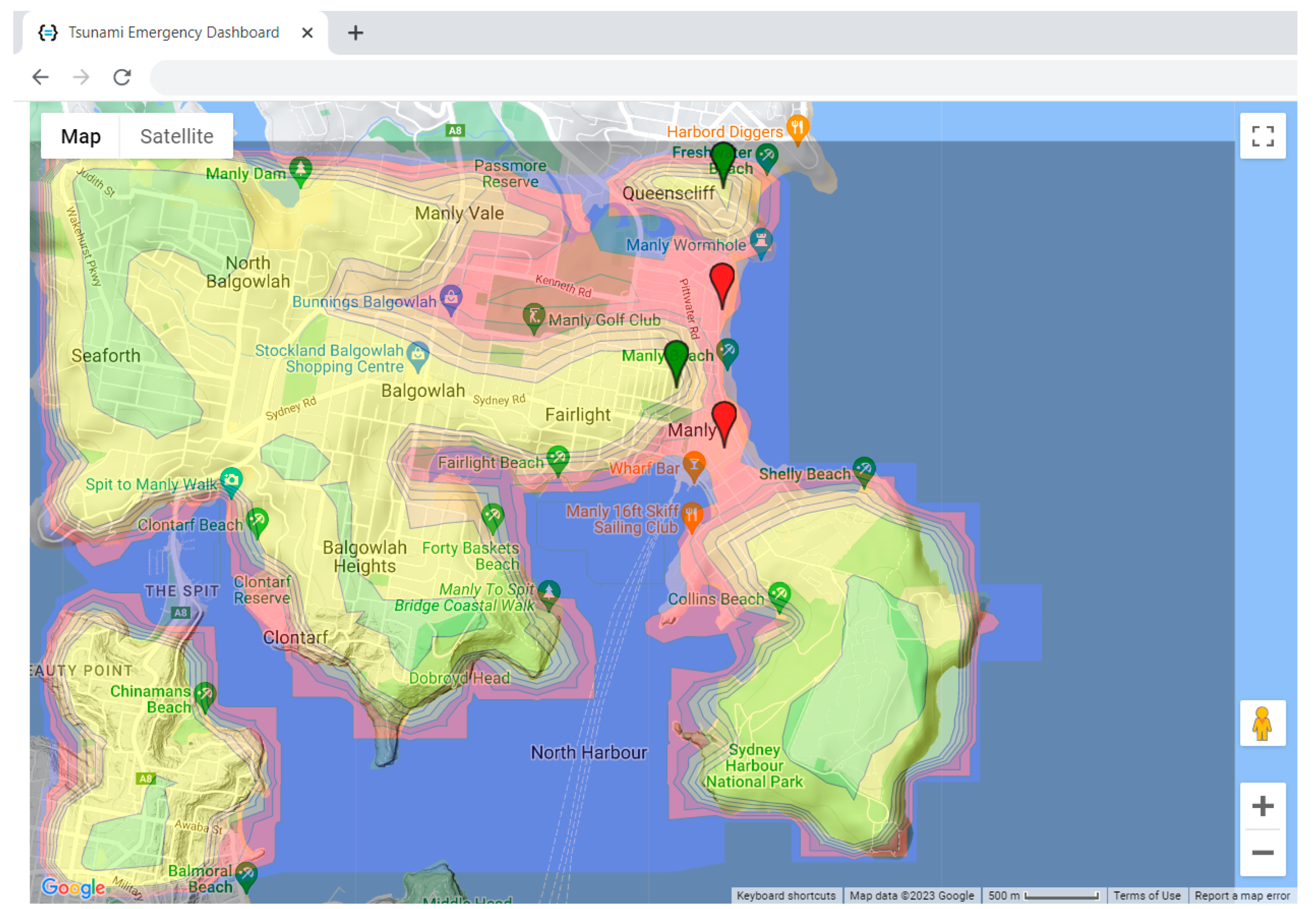
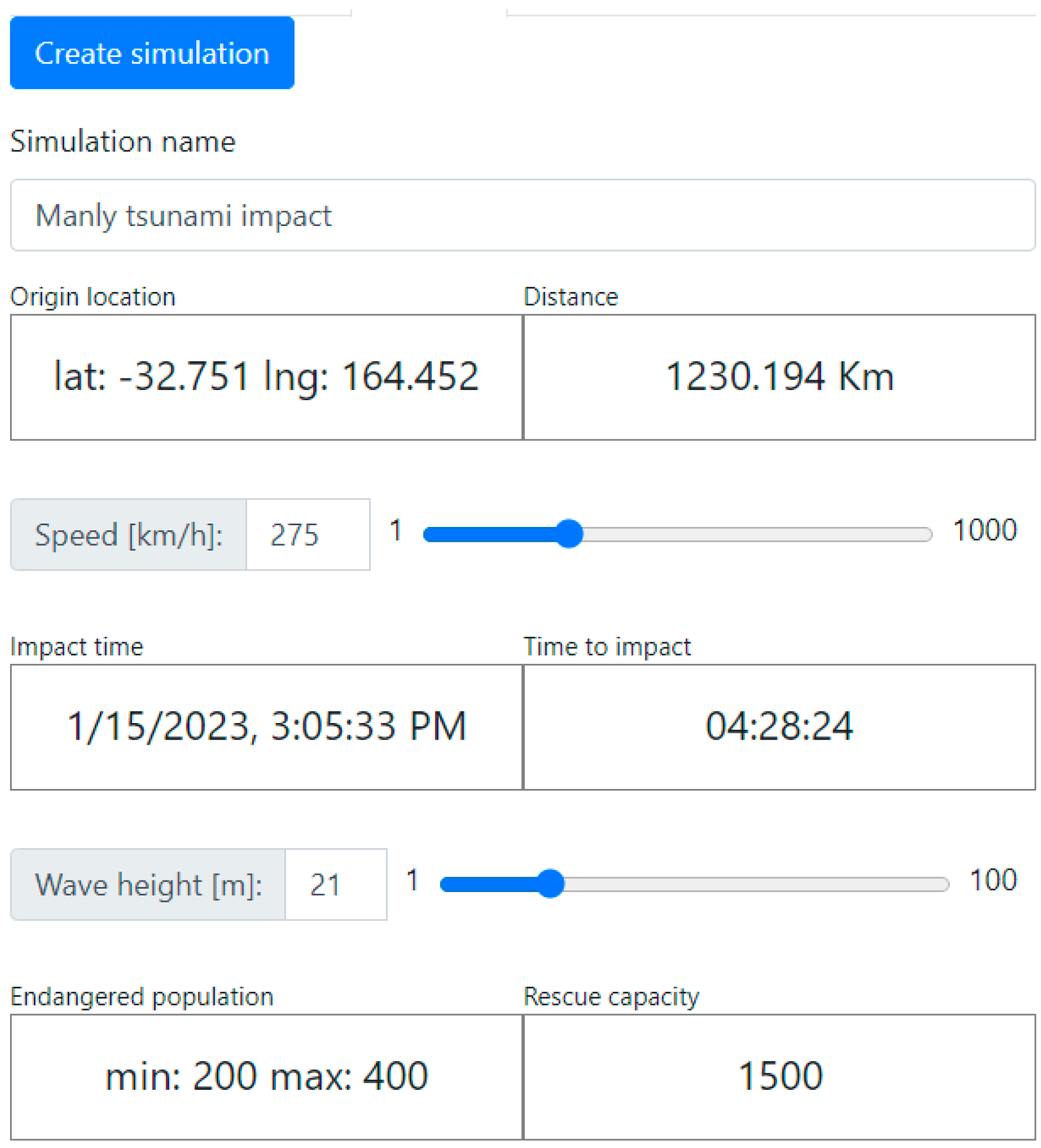
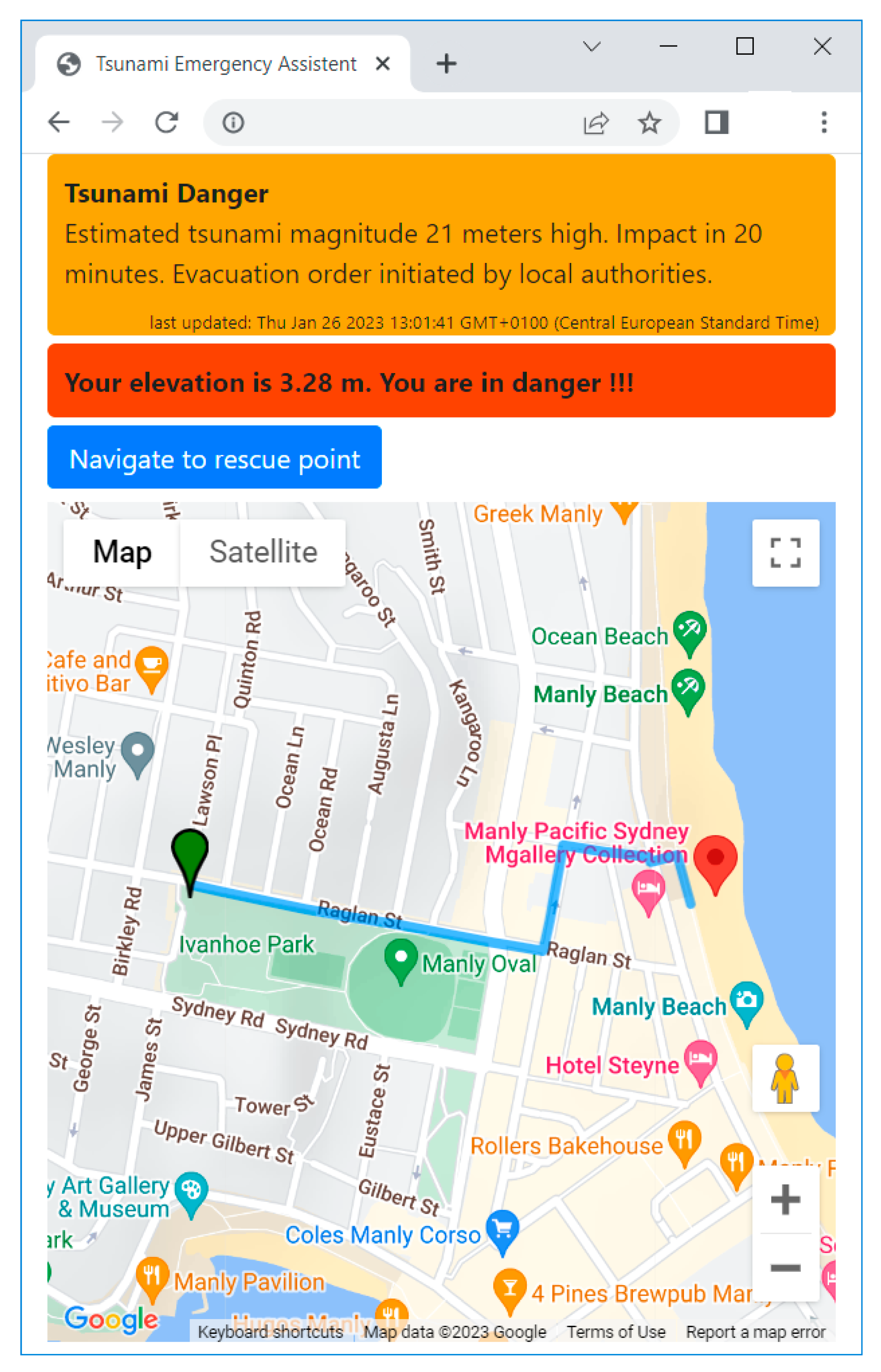
4. Application Components
5. Data Exploration and Machine Learning
5.1. Data Exploration Component
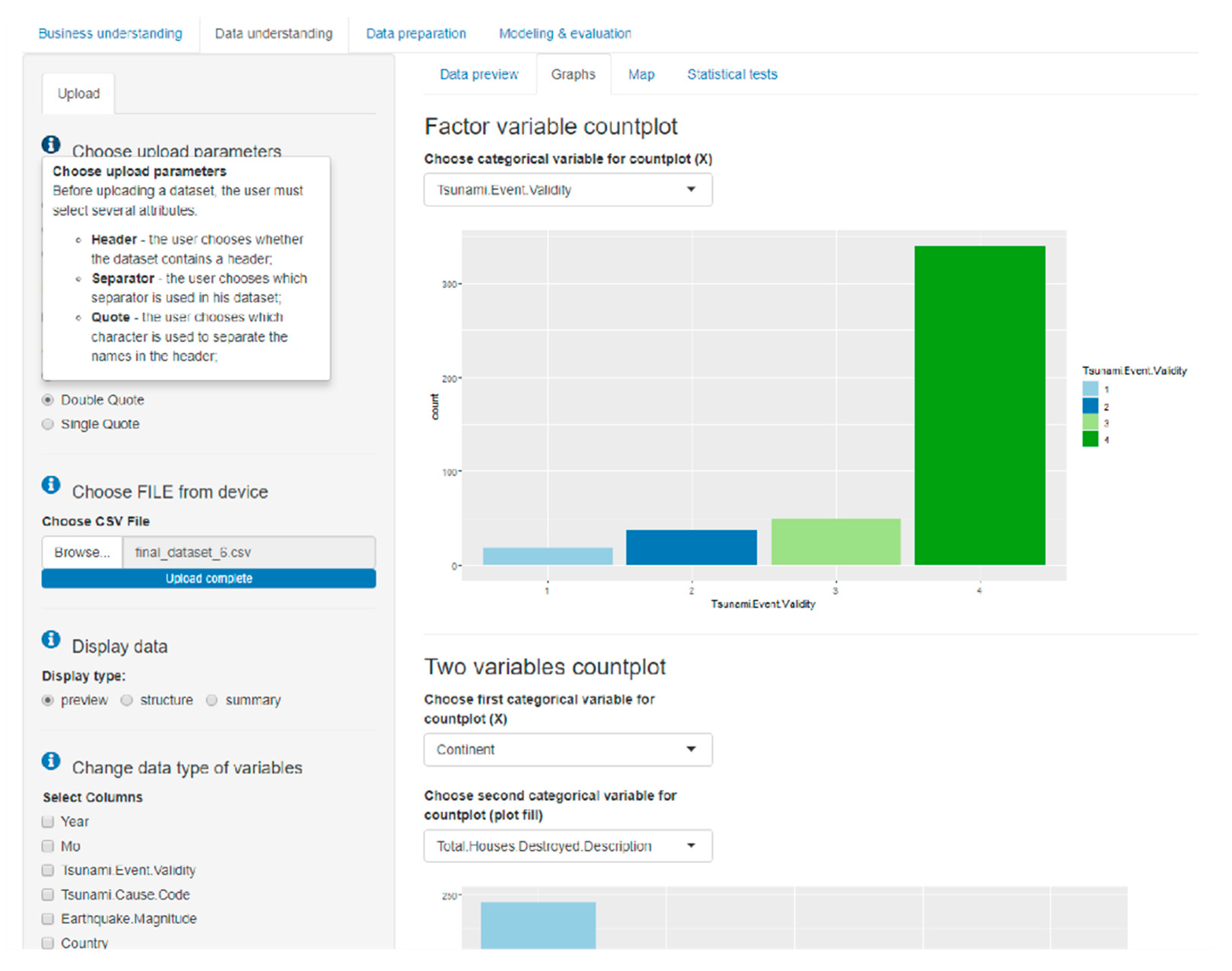
- Business understanding: The tab is used to explain the issue under investigation. If the user is familiar with tsunami issues, the card also serves to unify the application terminology with the terminology experienced by the user.
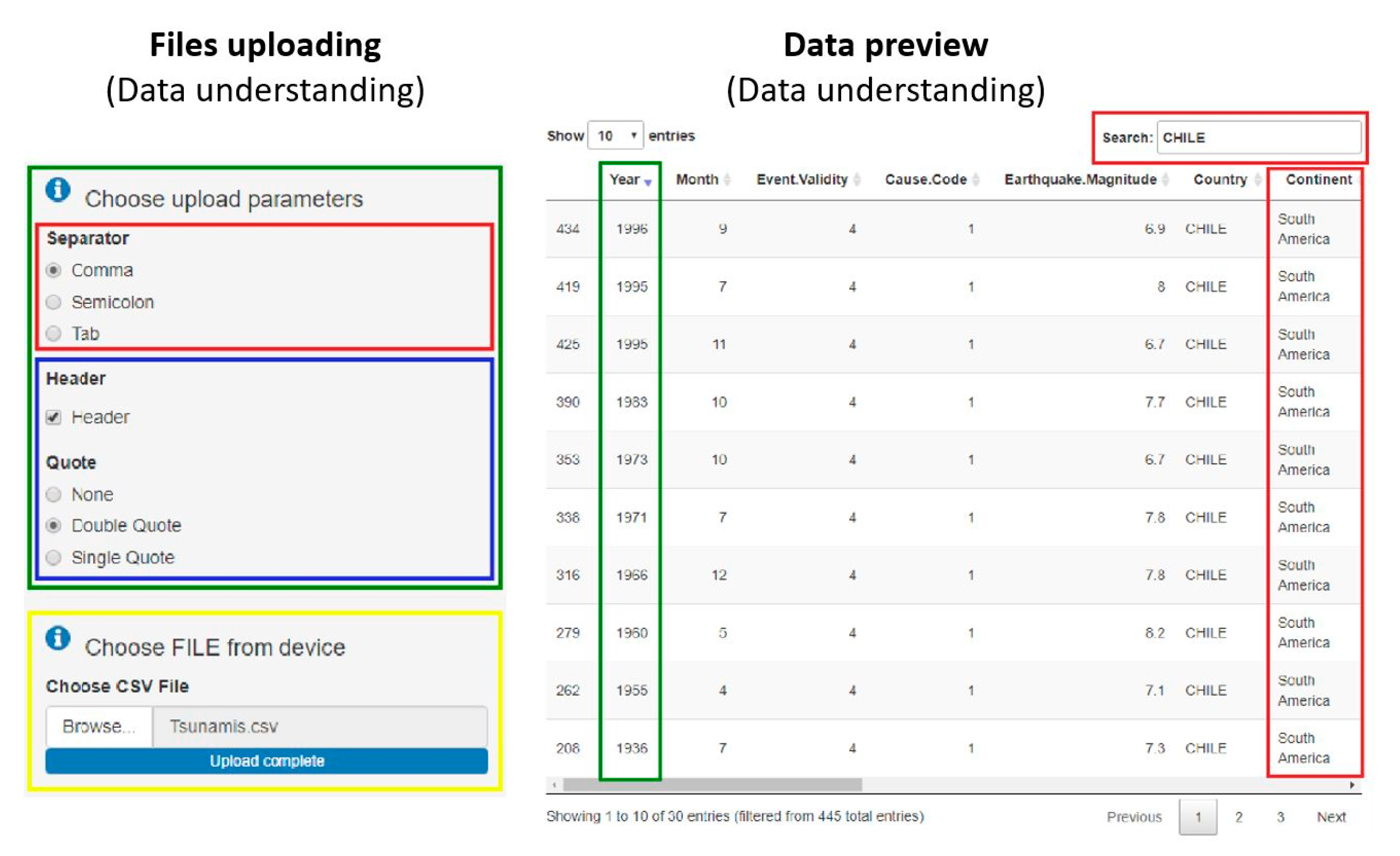
- Data understanding: The tab offers resources for understanding the data itself or visualising data in the form of a graph, table or map. Data can also be uploaded here.
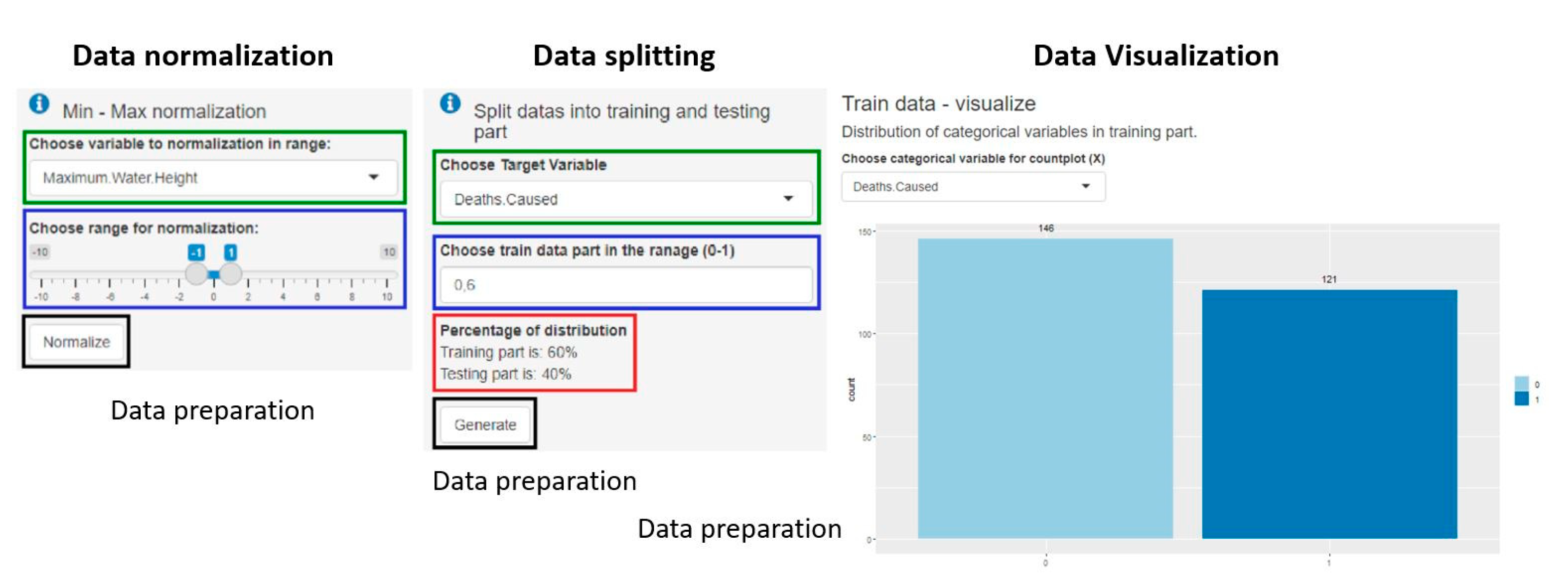
- Data preparation: The tab is used for the preparation of data, which are subsequently used in modelling and evaluating the model.
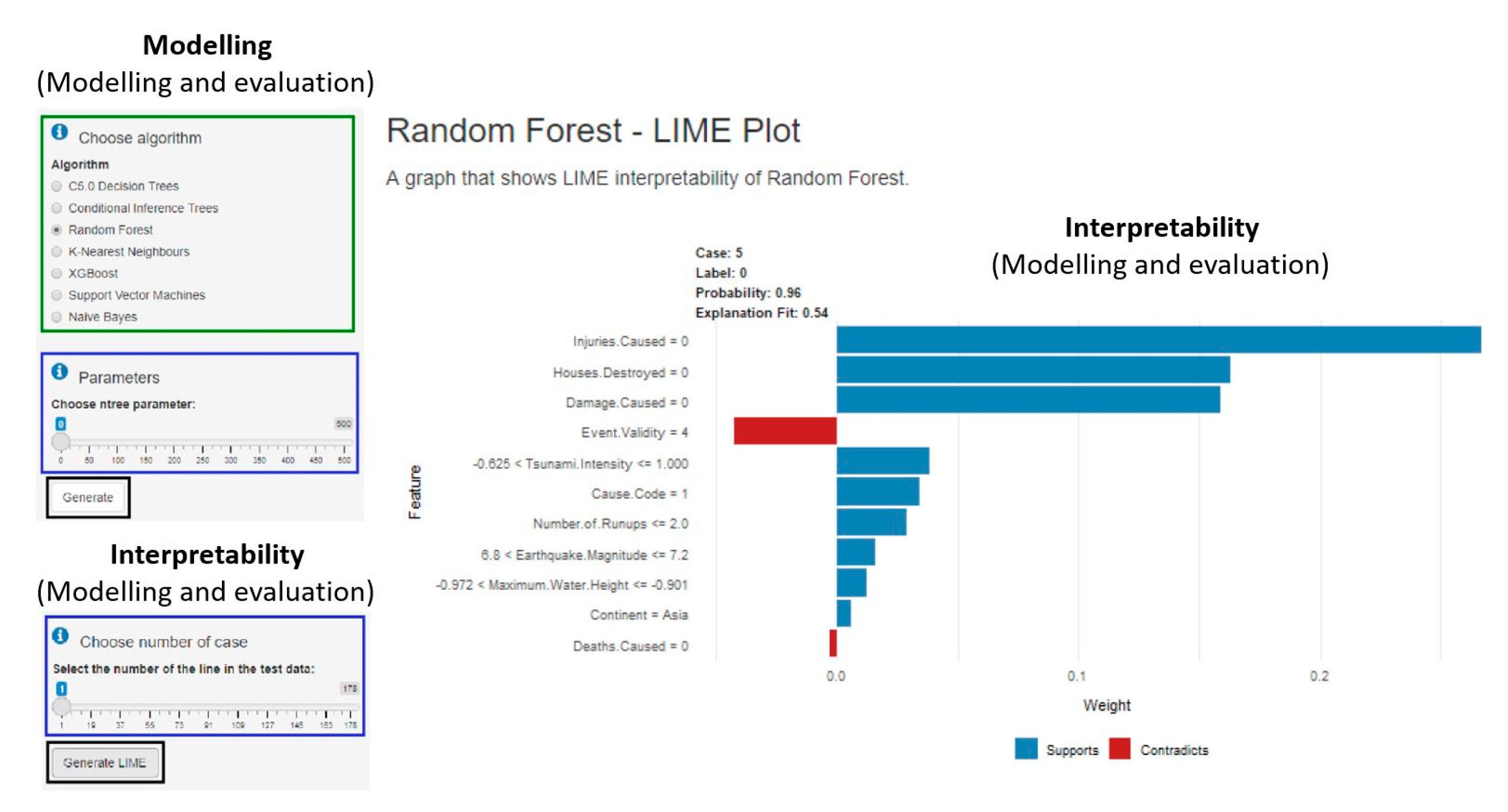
- Modelling and evaluation: The tab is used to develop the model itself or initialise its parameters, training and evaluation. From the point of view of evaluation, the user is offered metrics for evaluating the quality of the model.
- Continuous access to the application: The application should be accessed continuously, i.e., proceeding from the first tab to the last tab so that a distorted and therefore useless model is not created. For example, if the data are divided into training and testing (modeling and evaluation tab), then it is not appropriate to edit it again (data preparation tab).
- Complete data: The data representing the model’s input should not contain missing values. Missing values are solved in the data preparation process (data preparation tab), not in the modeling phase (modeling and evaluation tab)
- Text values of variables: Non-text data type variables are calculated for the creation of the model. If such a variable occurs in the data, it is advisable to transform it into a categorical form (data understanding tab).
- Categorical attribute: The target attribute must always be categorical, which is binary in nature (i.e., it works with two classes—0 and 1).
- Input data: By default, the application offers a sample dataset, “Tsunamis.csv”, which is created from the historical database of tsunami events, the author of which is NOAA (National Oceanic and Atmospheric Administration). However, the application allows users to upload their own datasets.
5.2. Development Phases and Prototyping
6. Agent-Based Evacuation Simulations
6.1. Agent-Based Evacuation Component
- Position (int[x, y]);
- Speed (m/s);
- Group size (int);
- Conviction (int 0–100);
- Probability of having guiding application (% float);
- Is waiting for confirmation of emergency message? (boolean).
- Pedestrian routes;
- Vehicle roads with breakpoints that can be equipped with information signs;
- Disaster zones on the map;
- Safe zones (shelters) with their capacity (maximum number of evacuees, integer);
- Three information channels (mobile application, radio broadcasting and information signs on roads).
6.2. Specification of the Evacuation Process
- Person-agents and vehicle-agents are distributed randomly in the environment.
- Information channels are activated after a specific delay.
- Person-agents and vehicle-agents receive evacuation signals through information channels (guiding application, radio broadcasting or social networks).
- If the person-agent is not convinced, he waits for a message from another information channel.
- Person-agents try to evacuate to the closest safe zone (there is a time before the disaster).
- Person-agents with the smartphone guiding application will receive the best routing information. Others can join someone with a guiding application, or they can move on their own.
- In general, person-agents with the smartphone guiding application make faster decisions (because they do not waste time searching for information).
- Vehicle-agents (with people on board) try to evacuate inland.
- There will be a point of danger which disables part of the map with its safe zones.
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Heidarzadeh, M.; Gusman, A.R.; Ishibe, T.; Sabeti, R.; Šepić, J. Estimating the Eruption-Induced Water Displacement Source of the 15 January 2022 Tonga Volcanic Tsunami from Tsunami Spectra and Numerical Modelling. Ocean. Eng. 2022, 261, 112165. [Google Scholar] [CrossRef]
- Cordrie, L.; Feuillet, N.; Gailler, A.; Biguenet, M.; Chaumillon, E.; Sabatier, P. A Megathrust Earthquake as Source of a Pre-Colombian Tsunami in Lesser Antilles: Insight from Sediment Deposits and Tsunami Modeling. Earth-Sci. Rev. 2022, 228, 104018. [Google Scholar] [CrossRef]
- Mori, N.; Satake, K.; Cox, D.; Goda, K.; Catalan, P.A.; Ho, T.-C.; Imamura, F.; Tomiczek, T.; Lynett, P.; Miyashita, T.; et al. Giant Tsunami Monitoring, Early Warning and Hazard Assessment. Nat. Rev. Earth Environ. 2022, 3, 557–572. [Google Scholar] [CrossRef]
- Lin, S.C.; Wu, T.-R.; Yen, E.; Chen, H.-Y.; Hsu, J.; Tsai, Y.-L.; Lee, C.-J.; Liu, P.L.-F. Development of a Tsunami Early Warning System for the South China Sea. Ocean. Eng. 2015, 100, 1–18. [Google Scholar] [CrossRef]
- Falck, C.; Ramatschi, M.; Subarya, C.; Bartsch, M.; Merx, A.; Hoeberechts, J.; Schmidt, G. Near Real-Time GPS Applications for Tsunami Early Warning Systems. Nat. Hazards Earth Syst. Sci. 2010, 10, 181–189. [Google Scholar] [CrossRef]
- Richard, G.L.; Msheik, K.; Duran, A. A Preliminary Depth-Integrated Model for Tsunamis Propagation Including Water Compressibility and Seafloor Elasticity. Eur. J. Mech.-B/Fluids 2023, 99, 84–97. [Google Scholar] [CrossRef]
- Solano-Hernández, E.A.; Vázquez Caamal, L.; Melgar, D. Tsunami Modeling and Inundation Maps of the ∼M8.6, 1787 Earthquake along the Oaxacan Coast. J. S. Am. Earth Sci. 2022, 119, 103982. [Google Scholar] [CrossRef]
- Ajmar, A.; Annunziato, A.; Boccardo, P.; Tonolo, F.G.; Wania, A. Tsunami Modeling and Satellite-Based Emergency Mapping: Workflow Integration Opportunities. Geosciences 2019, 9, 314. [Google Scholar] [CrossRef] [Green Version]
- Kubo, T.; Suzuki, W.; Ooi, M.; Takahashi, N.; Asao, K.; Yoshioka, K. Application of a Real-Time Tsunami Forecast System to the Disaster Response of Local Governments during a Major Tsunami Disaster. Geosciences 2019, 9, 102. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Wang, H.; Lindell, M.K.; Jung, M.C.; Siam, M.R.K. Tsunami Preparedness and Resilience: Evacuation Logistics and Time Estimations. Transp. Res. Part D Transp. Environ. 2022, 109, 103324. [Google Scholar] [CrossRef]
- Mas, E.; Suppasri, A.; Imamura, F.; Koshimura, S. Agent-Based Simulation of the 2011 Great East Japan Earthquake/Tsunami Evacuation: An Integrated Model of Tsunami Inundation and Evacuation. J. Nat. Disaster Sci. 2012, 34, 41–57. [Google Scholar] [CrossRef] [Green Version]
- Behrens, J.; Løvholt, F.; Jalayer, F.; Lorito, S.; Salgado-Gálvez, M.A.; Sørensen, M.; Abadie, S.; Aguirre-Ayerbe, I.; Aniel-Quiroga, I.; Babeyko, A.; et al. Probabilistic Tsunami Hazard and Risk Analysis: A Review of Research Gaps. Front. Earth Sci. 2021, 9, 628772. [Google Scholar] [CrossRef]
- Rafliana, I.; Jalayer, F.; Cerase, A.; Cugliari, L.; Baiguera, M.; Salmanidou, D.; Necmioğlu, Ö.; Ayerbe, I.A.; Lorito, S.; Fraser, S.; et al. Tsunami Risk Communication and Management: Contemporary Gaps and Challenges. Int. J. Disaster Risk Reduct. 2022, 70, 102771. [Google Scholar] [CrossRef]
- UNESCO. Reducing and Managing the Risk of Tsunamis—UNESCO Digital Library; Intergovernmental Oceanographic Commission: Paris, France, 2011; Volume 2011. [Google Scholar]
- Løvholt, F.; Fraser, S.; Salgado-Gálvez, M.; Lorito, S.; Selva, J.; Romano, F.; Suppasri, A.; Mas, E.; Polet, J.; Behrens, J.; et al. Global Trends in Advancing Tsunami Science for Improved Hazard and Risk Understanding. In Global Assesment Report on Disater and Risk Reduction 2019; United Nations Office for Disaster Risk Reduction: Geneva, Switzerland, 2019; Volume 2019. [Google Scholar]
- Wächter, J.; Babeyko, A.; Fleischer, J.; Häner, R.; Hammitzsch, M.; Kloth, A.; Lendholt, M. Development of Tsunami Early Warning Systems and Future Challenges. Nat. Hazards Earth Syst. Sci. 2012, 12, 1923–1935. [Google Scholar] [CrossRef] [Green Version]
- The Open Group TOGAF 9—The Open Group Architecture Framework Version 9; The Open Group: San Francisco, CA, USA, 2009; p. 744.
- Wirth, R.; Hipp, J. CRISP-DM: Towards a Standard Process Model for Data Mining. In Proceedings of the 4th international conference on the practical applications of knowledge discovery and data mining, Manchester, UK, 11–13 April 2000; Volume 1, pp. 29–39. [Google Scholar]
- Galaz, J.; Cienfuegos, R.; Echeverría, A.; Pereira, S.; Bertín, C.; Prato, G.; Karich, J.C. Integrating Tsunami Simulations in Web Applications Using BROWNI, an Open Source Client-Side GPU-Powered Tsunami Simulation Library. Comput. Geosci. 2022, 159, 104976. [Google Scholar] [CrossRef]
- Grzan, D.P.; Rundle, J.B.; Wilson, J.M.; Song, T.; Ward, S.N.; Donnellan, A. Tsunami Squares: Earthquake Driven Inundation Mapping and Validation by Comparison to the Regional Ocean Modeling System. Prog. Disaster Sci. 2021, 12, 100191. [Google Scholar] [CrossRef]
- Tadibaght, A.; El M’rini, A.; Siame, L.; Bellier, O. Tsunami Impact Assessment for Low-Lying Cities along the Northern Atlantic Coast of Morocco Using MIRONE Software. J. Afr. Earth Sci. 2022, 192, 104580. [Google Scholar] [CrossRef]
- Jin, D.; Lin, J. Managing Tsunamis through Early Warning Systems: A Multidisciplinary Approach. Ocean. Coast. Manag. 2011, 54, 189–199. [Google Scholar] [CrossRef] [Green Version]
- Australian Government Joint Australian Tsunami Warning Centre. Available online: http://www.bom.gov.au/tsunami/about/atws.shtml (accessed on 23 January 2023).
- Rahayu, H.P.; Comfort, L.K.; Haigh, R.; Amaratunga, D.; Khoirunnisa, D. A Study of People-Centered Early Warning System in the Face of near-Field Tsunami Risk for Indonesian Coastal Cities. Int. J. Disaster Resil. Built Environ. 2020, 11, 241–262. [Google Scholar] [CrossRef]
- United Nations. Sendai Framework for Disaster Risk Reduction 2015–2030; United Nations: San Francisco, CA, USA, 2015. [Google Scholar]
- Canterford, R.; Hibbins, R.; Jarrott, K.; Lenc, D.; Muller, C.; Wong, K. The Australian Tsunami Warning System—Contribution to the WMO Integrated Global Observing System For The Indian and Pacific Oceans. WMO Library 2008, 2008. Available online: https://studylib.net/doc/7835582/the-australian-tsunami-warning-system-and-its-contributio (accessed on 6 March 2023).
- Murjaya, J. Tsunami Early Warning Service Guidebook for InaTEWS; Badan Metereologi Klimatologi & Geofisika: Jakarta Pusat, Indonesia, 2012; Available online: https://iotic.ioc-unesco.org/country-resources/tsunami-early-warning-service-guidebook-for-inatews/ (accessed on 6 March 2023).
- National Weather Service National Weather Service—Tsunami Hazards. Available online: https://tsunami.gov/?page=message_definitions (accessed on 23 February 2023).
- An, C.; Liu, H.; Ren, Z.; Yuan, Y. Prediction of Tsunami Waves by Uniform Slip Models. J. Geophys. Res. Oceans 2018, 123, 8366–8382. [Google Scholar] [CrossRef]
- Mulia, I.E.; Gusman, A.R.; Satake, K. Applying a Deep Learning Algorithm to Tsunami Inundation Database of Megathrust Earthquakes. J. Geophys. Res. Solid Earth 2020, 125, e2020JB019690. [Google Scholar] [CrossRef]
- Liu, C.M.; Rim, D.; Baraldi, R.; LeVeque, R.J. Comparison of Machine Learning Approaches for Tsunami Forecasting from Sparse Observations. Pure Appl. Geophys. 2021, 178, 5129–5153. [Google Scholar] [CrossRef]
- Nacházel, T.; Babič, F.; Baiguera, M.; Čech, P.; Husáková, M.; Mikulecký, P.; Mls, K.; Ponce, D.; Salmanidou, D.; Štekerová, K.; et al. Tsunami-Related Data: A Review of Available Repositories Used in Scientific Literature. Water 2021, 13, 2177. [Google Scholar] [CrossRef]
- Hinkel, G. Implicit Incremental Model Analyses and Transformations; KIT Scientific Publishing: Karlsruhe, Germany, 2021; ISBN 3-7315-0763-3. [Google Scholar]
- Hou, J.; Ren, Z.; Wang, P.; Wang, J.; Gao, Y. Tsunami Assessment and Evacuation Analysis Using Remote Sensing for Tianya District of Sanya City, China. J. Earthq. Tsunami 2019, 13, 1941003. [Google Scholar] [CrossRef]
- Vranken, T.; Sliwa, B.; Wietfeld, C.; Schreckenberg, M. Adapting a Cellular Automata Model to Describe Heterogeneous Traffic with Human-Driven, Automated, and Communicating Automated Vehicles. Phys. A Stat. Mech. Its Appl. 2021, 570, 125792. [Google Scholar] [CrossRef]
- Makinoshima, F.; Imamura, F.; Abe, Y. Enhancing a Tsunami Evacuation Simulation for a Multi-Scenario Analysis Using Parallel Computing. Simul. Model. Pract. Theory 2018, 83, 36–50. [Google Scholar] [CrossRef]
- Fathianpour, A.; Evans, B.; Jelodar, M.B.; Wilkinson, S. Tsunami Evacuation Modelling via Micro-Simulation Model. Prog. Disaster Sci. 2023, 17, 100277. [Google Scholar] [CrossRef]
- Kim, K.; Kaviari, F.; Pant, P.; Yamashita, E. An Agent-Based Model of Short-Notice Tsunami Evacuation in Waikiki, Hawaii. Transp. Res. Part D Transp. Environ. 2022, 105, 103239. [Google Scholar] [CrossRef]
- Mostafizi, A.; Wang, H.; Cox, D.; Dong, S. An Agent-Based Vertical Evacuation Model for a near-Field Tsunami: Choice Behavior, Logical Shelter Locations, and Life Safety. Int. J. Disaster Risk Reduct. 2019, 34, 467–479. [Google Scholar] [CrossRef]
- Mikulecky, P.; Olsevicova, K.; Bures, V.; Mls, K. Possibilities of Ambient Intelligence and Smart Environments in Educational Institutions. In Handbook of Research on Ambient Intelligence and Smart Environments: Trends and Perspectives; Information Science Reference: Hershey, PA, USA, 2011; pp. 620–639. ISBN 978-1-61692-858-2. [Google Scholar]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Čech, P.; Mattoš, M.; Anderková, V.; Babič, F.; Alhasnawi, B.N.; Bureš, V.; Kořínek, M.; Štekerová, K.; Husáková, M.; Zanker, M.; et al. Architecture-Oriented Agent-Based Simulations and Machine Learning Solution: The Case of Tsunami Emergency Analysis for Local Decision Makers. Information 2023, 14, 172. https://doi.org/10.3390/info14030172
Čech P, Mattoš M, Anderková V, Babič F, Alhasnawi BN, Bureš V, Kořínek M, Štekerová K, Husáková M, Zanker M, et al. Architecture-Oriented Agent-Based Simulations and Machine Learning Solution: The Case of Tsunami Emergency Analysis for Local Decision Makers. Information. 2023; 14(3):172. https://doi.org/10.3390/info14030172
Chicago/Turabian StyleČech, Pavel, Martin Mattoš, Viera Anderková, František Babič, Bilal Naji Alhasnawi, Vladimír Bureš, Milan Kořínek, Kamila Štekerová, Martina Husáková, Marek Zanker, and et al. 2023. "Architecture-Oriented Agent-Based Simulations and Machine Learning Solution: The Case of Tsunami Emergency Analysis for Local Decision Makers" Information 14, no. 3: 172. https://doi.org/10.3390/info14030172