
Coupled SPH–FEM Modeling of Tsunami-Borne Large Debris Flow and Impact on Coastal Structures




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Numerical Method
2.1. SPH Governing Equations
2.1.1. Kernel Approximation
- The smoothing function is normalized:
- 2.
- There is a compact support for the smoothing function:
- 3.
- is non-negative for any within the support domain. This is necessary to achieve physically meaningful results in hydrodynamic computations.
- 4.
- The smoothing length increases as particles separate and reduces as the concentration increases.
- 5.
- With the smoothing length approaching zero, the kernel approaches the Dirac delta function:
- 6.
- The smoothing function should be an even function.
2.1.2. Particle Approximation
2.2. SPH for Viscous Fluid
2.3. Sorting
2.4. Equation of State (EOS)
2.5. Time Integration
2.6. Contact Definitions
3. Experimental Work
4. Coupled SPH–FEM Modeling
4.1. Numerical Settings
4.2. Accuracy of Numerical Modeling
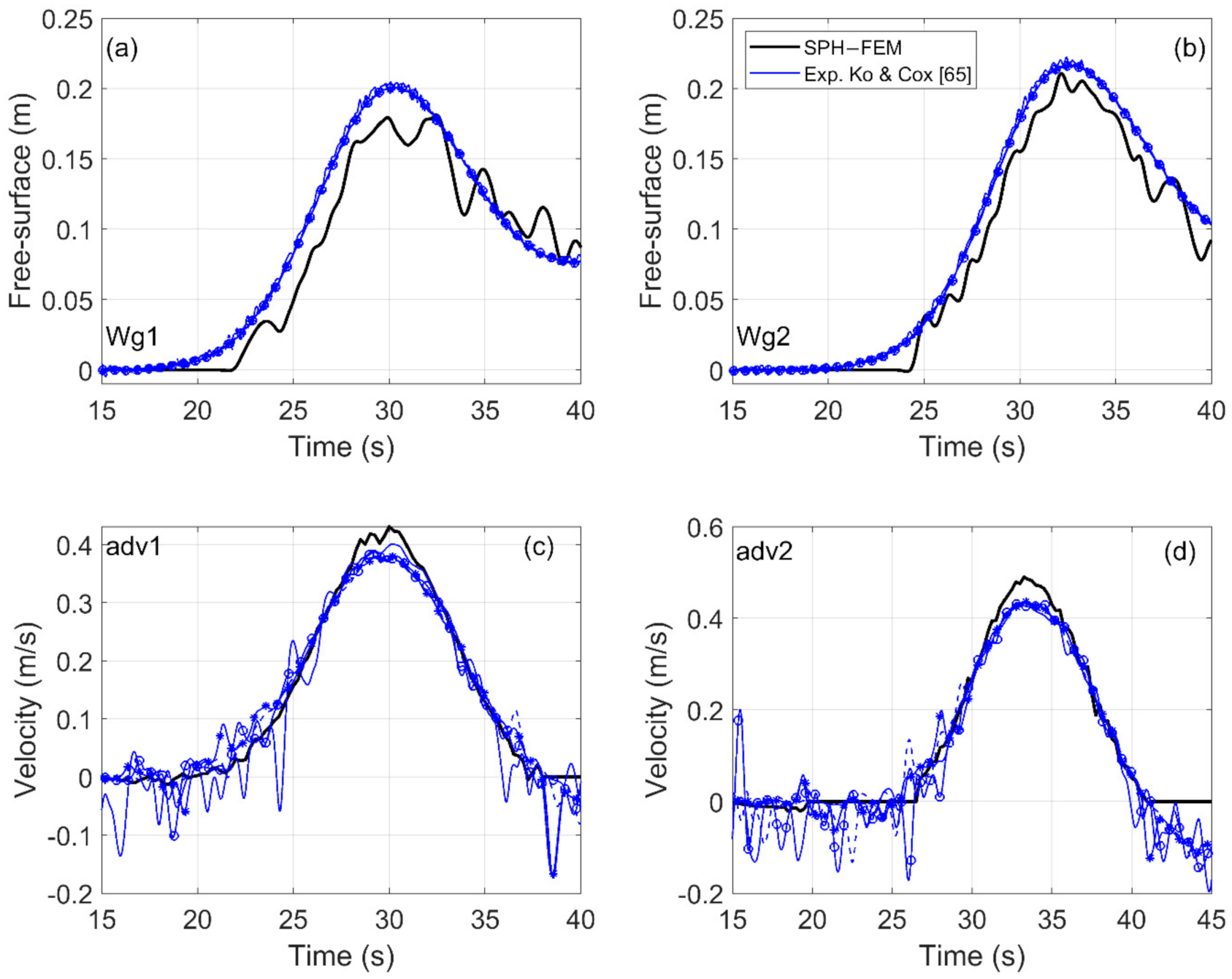
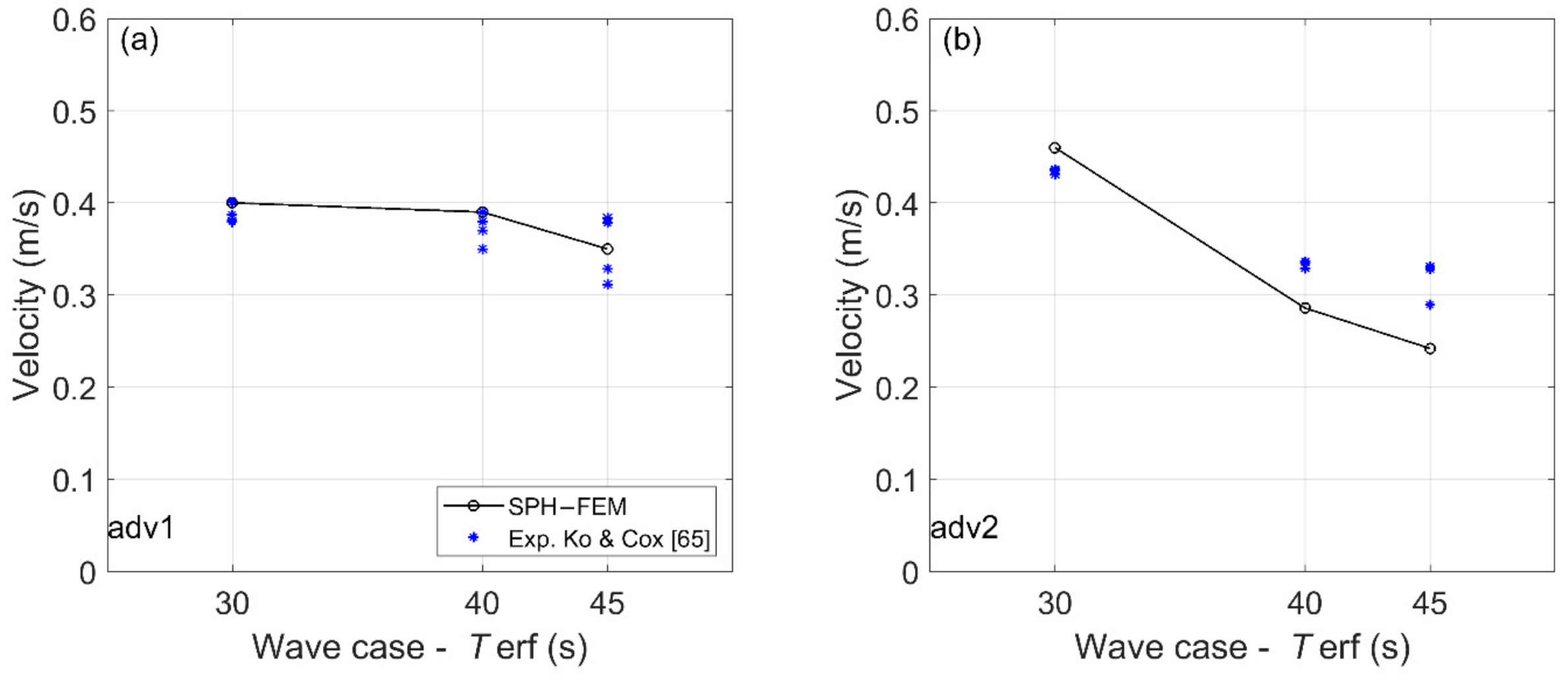
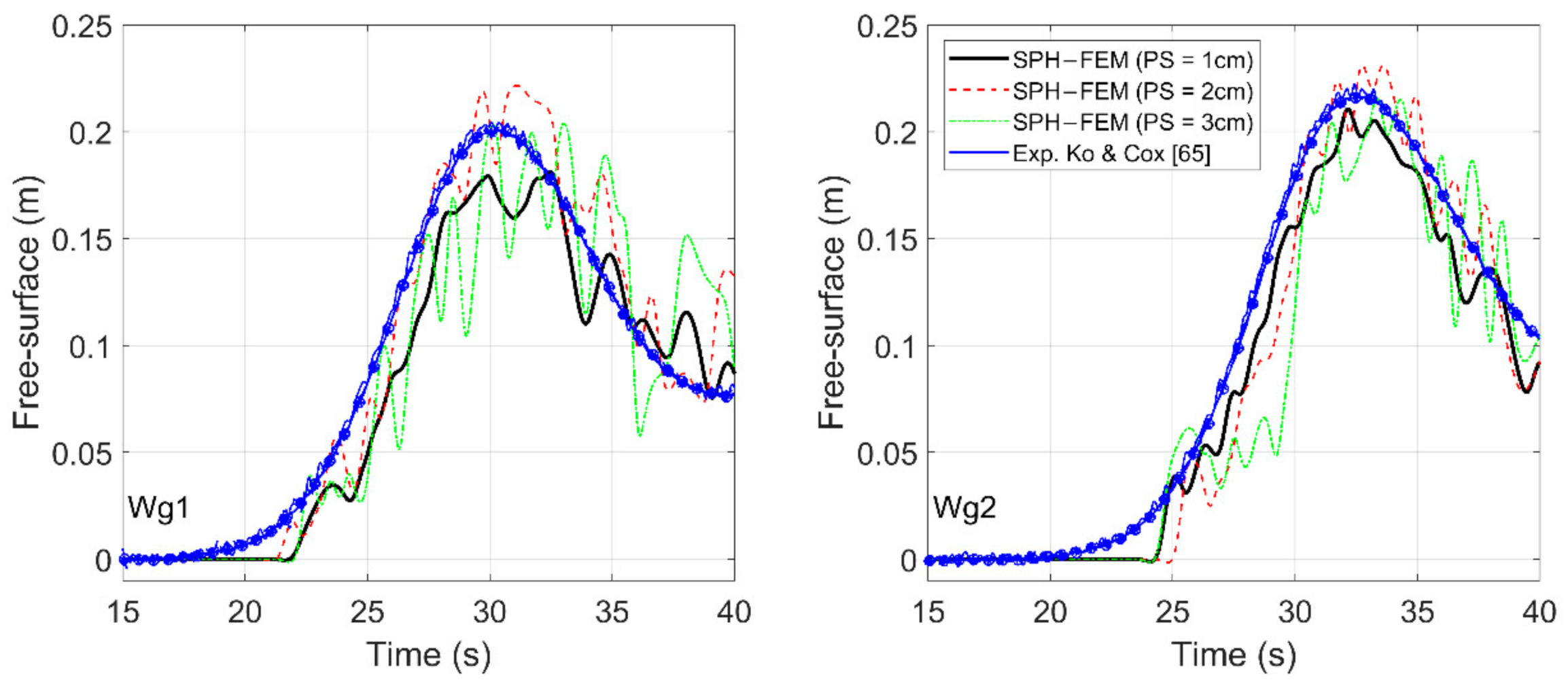
4.2.1. Free Surface and Fluid Velocities
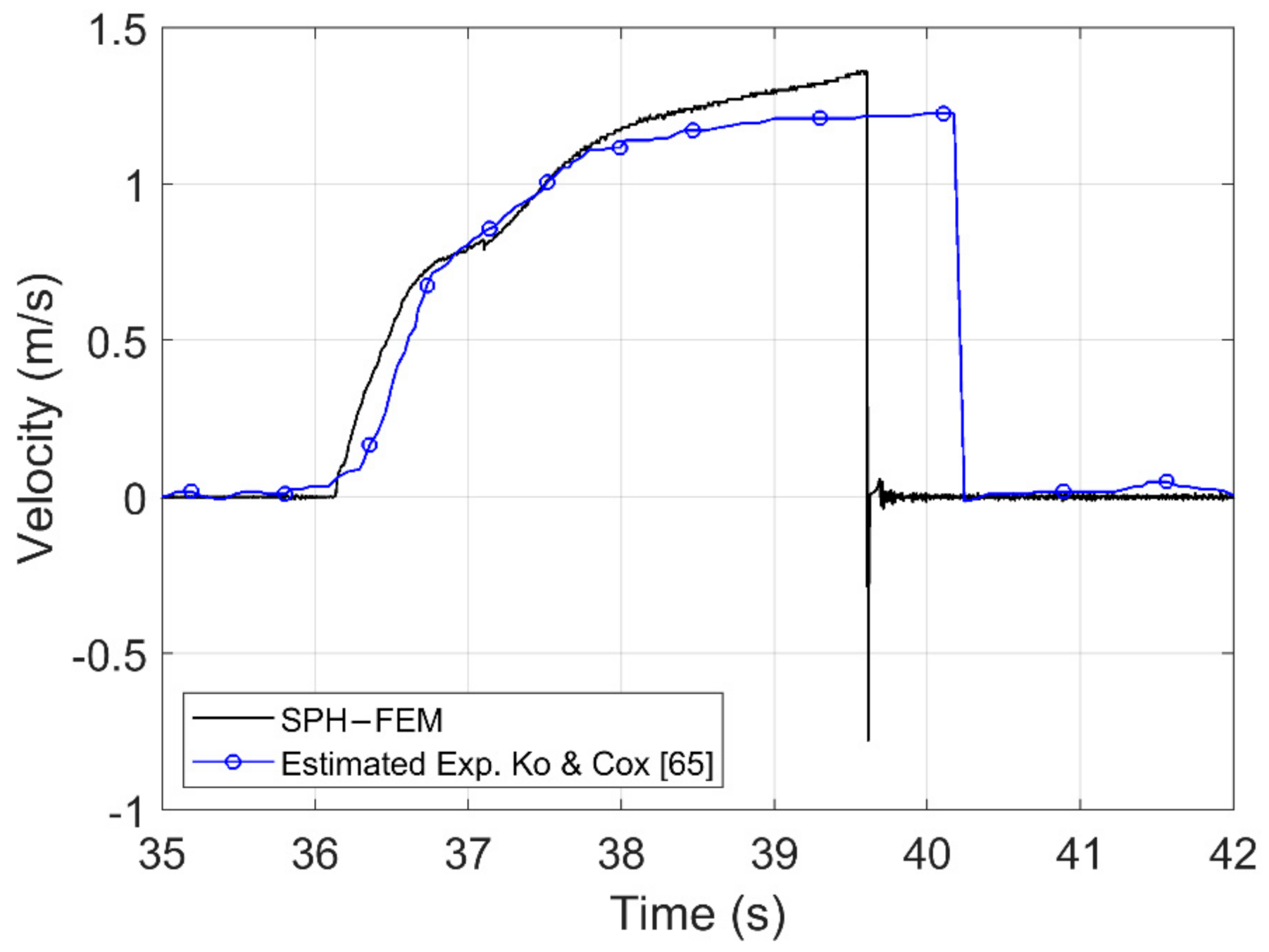
4.2.2. Debris Motion
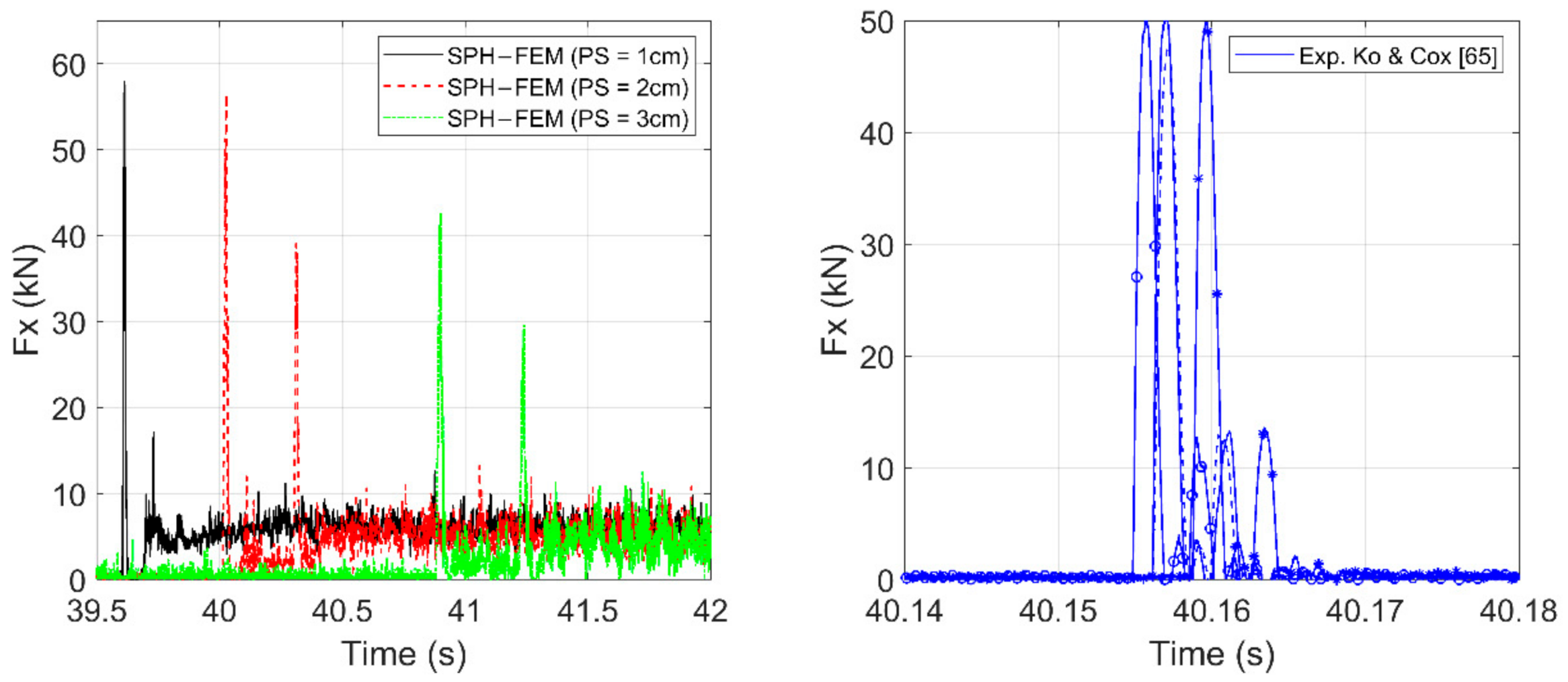
4.2.3. Debris Impact Force
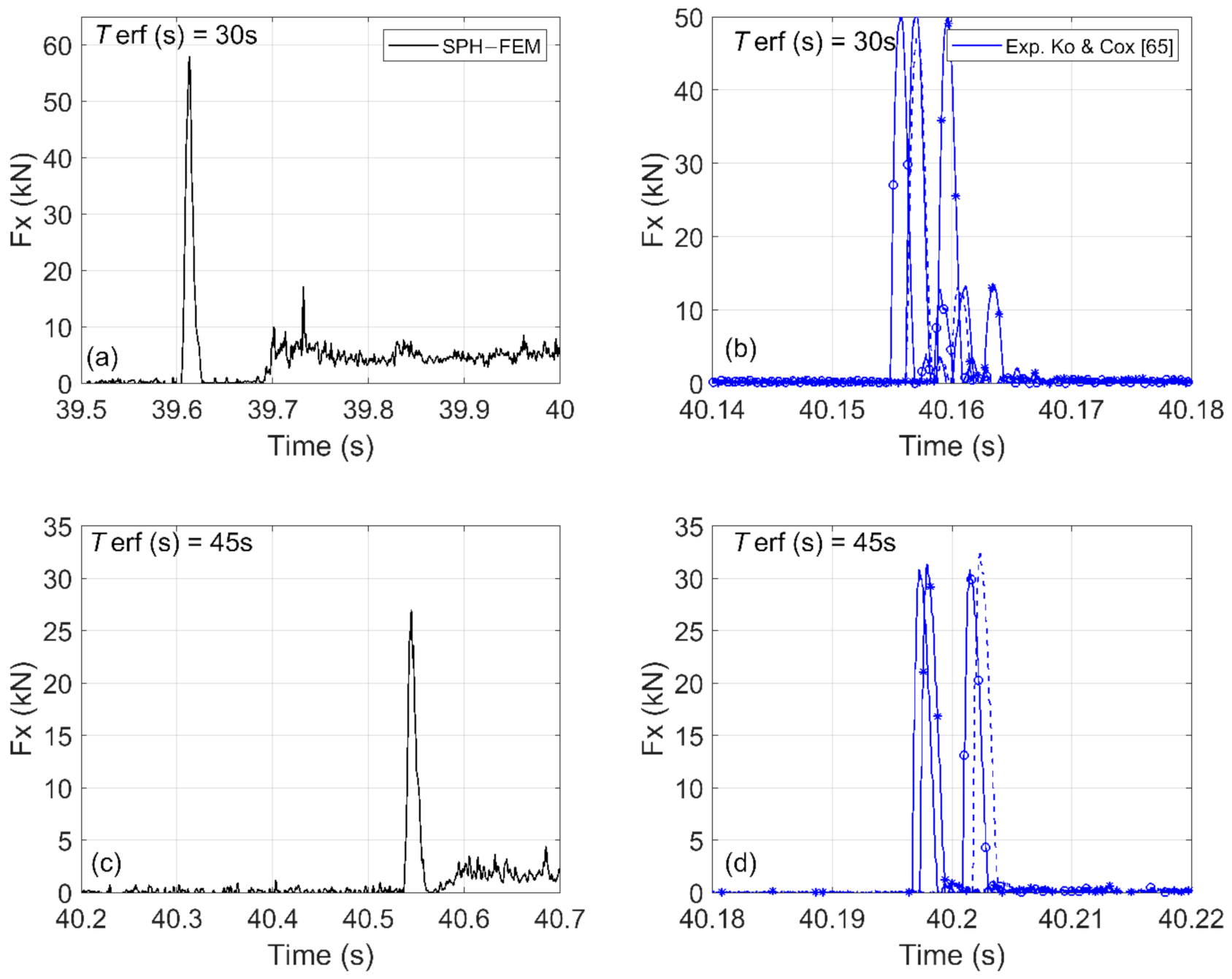
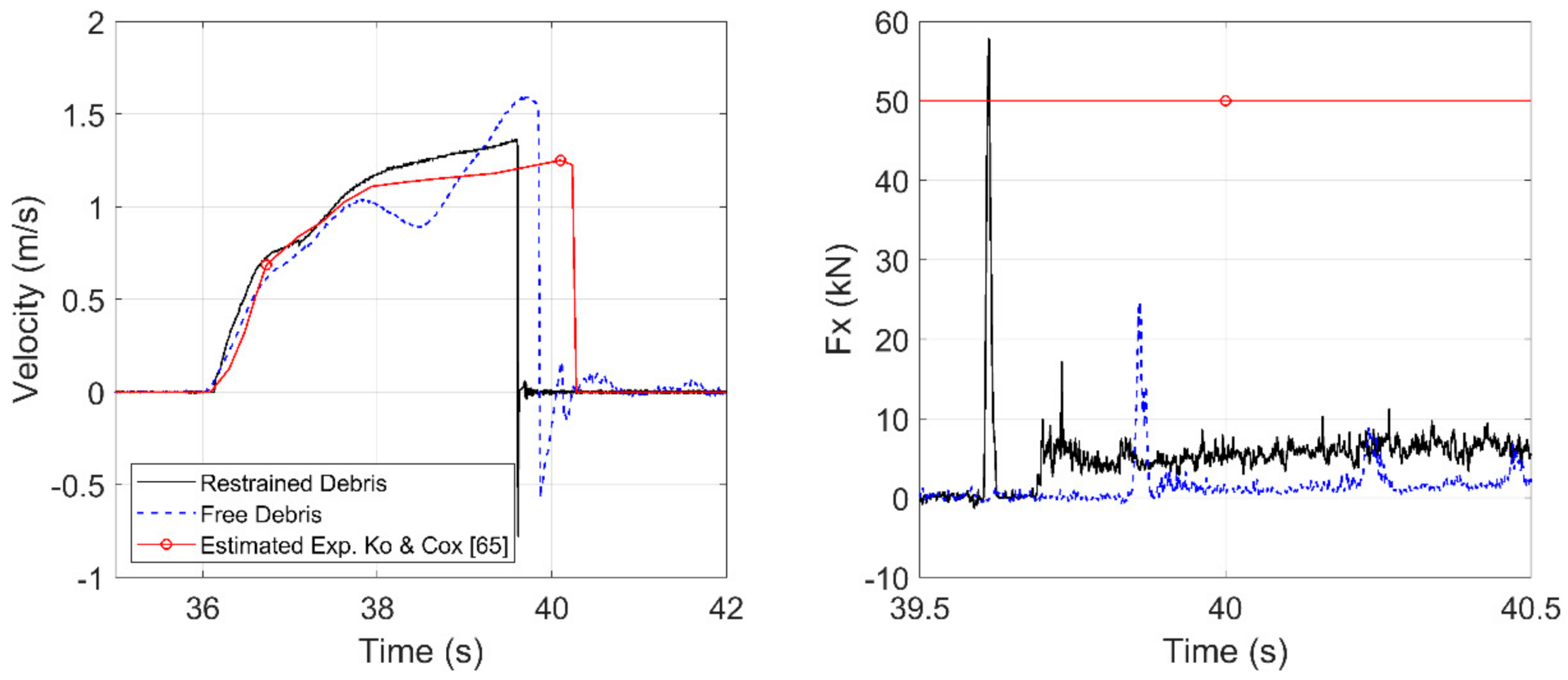
- In the numerical simulations, the impact force on the column is applied earlier for Terf = 30 s and later for Terf = 45 s compared to the physical tests. However, these differences in the instants could be justified by the differences in the debris velocities, which were most likely overpredicted and underpredicted, respectively, as indicated by the trends in the maximum values. In other words, it is reasonable for the debris impact to occur earlier when the numerical models overpredict the magnitude of the impact, because the reason is the larger debris velocity.
- Immediately after the primary impact force, the column in the physical tests experienced a second short-duration impact force, which is relatively small compared to the main impact. However, this trend was not observed in the numerical results. In contrast, the simulations show a long duration load after the initial impact, which seems to have a nearly constant magnitude. This difference can be attributed again to the 2D simplification made in the numerical models, which are unable to allow the fluid to escape from the sides of the debris after the initial impact on the column and relieve the pressures applied on its offshore face. This leads consequently to the stagnation of the flow in front of the offshore face, resulting in a nearly steady-state horizontal damming load.
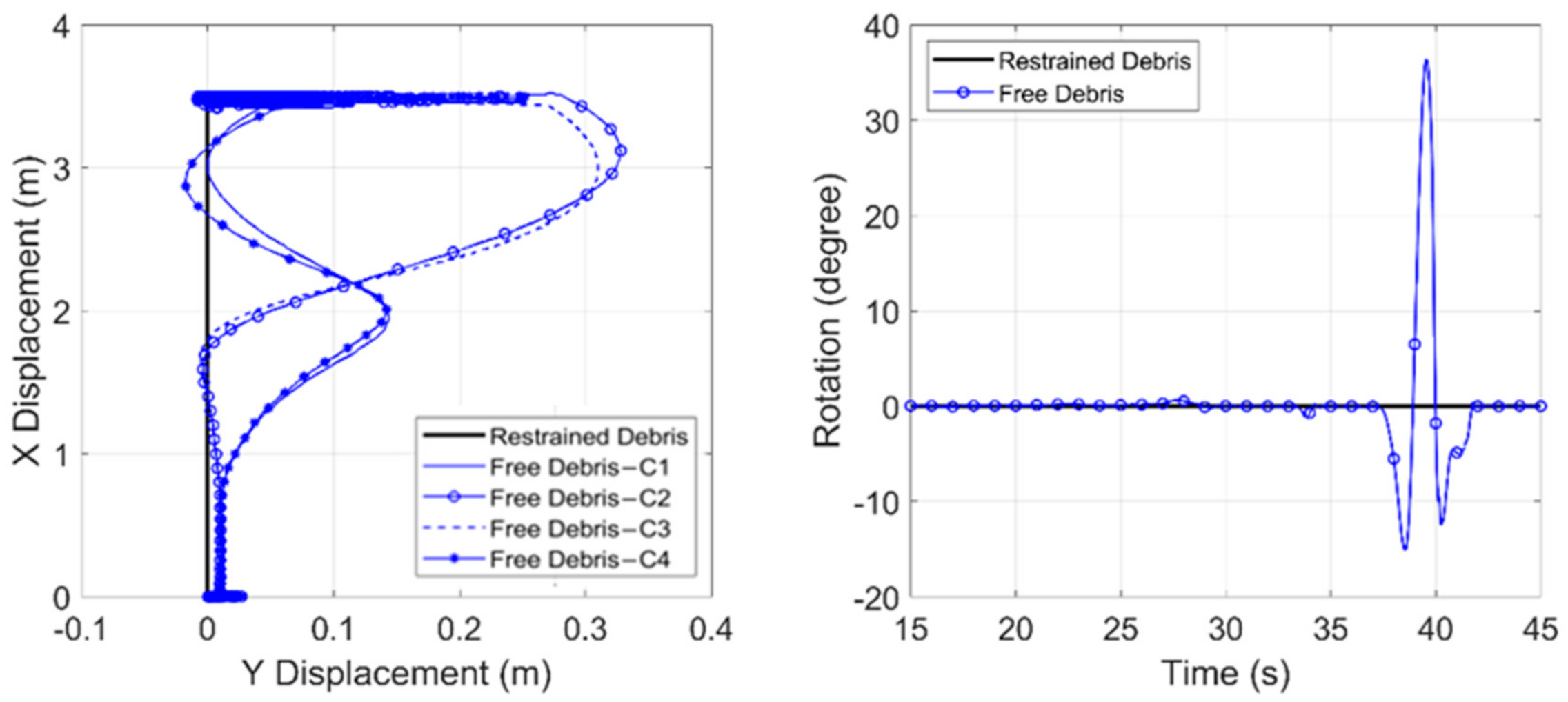
5. Role of Debris Restraints
6. Effect of Hydraulic Conditions on Debris Motion and Impact Forces
6.1. Tsunami Flow Characteristics
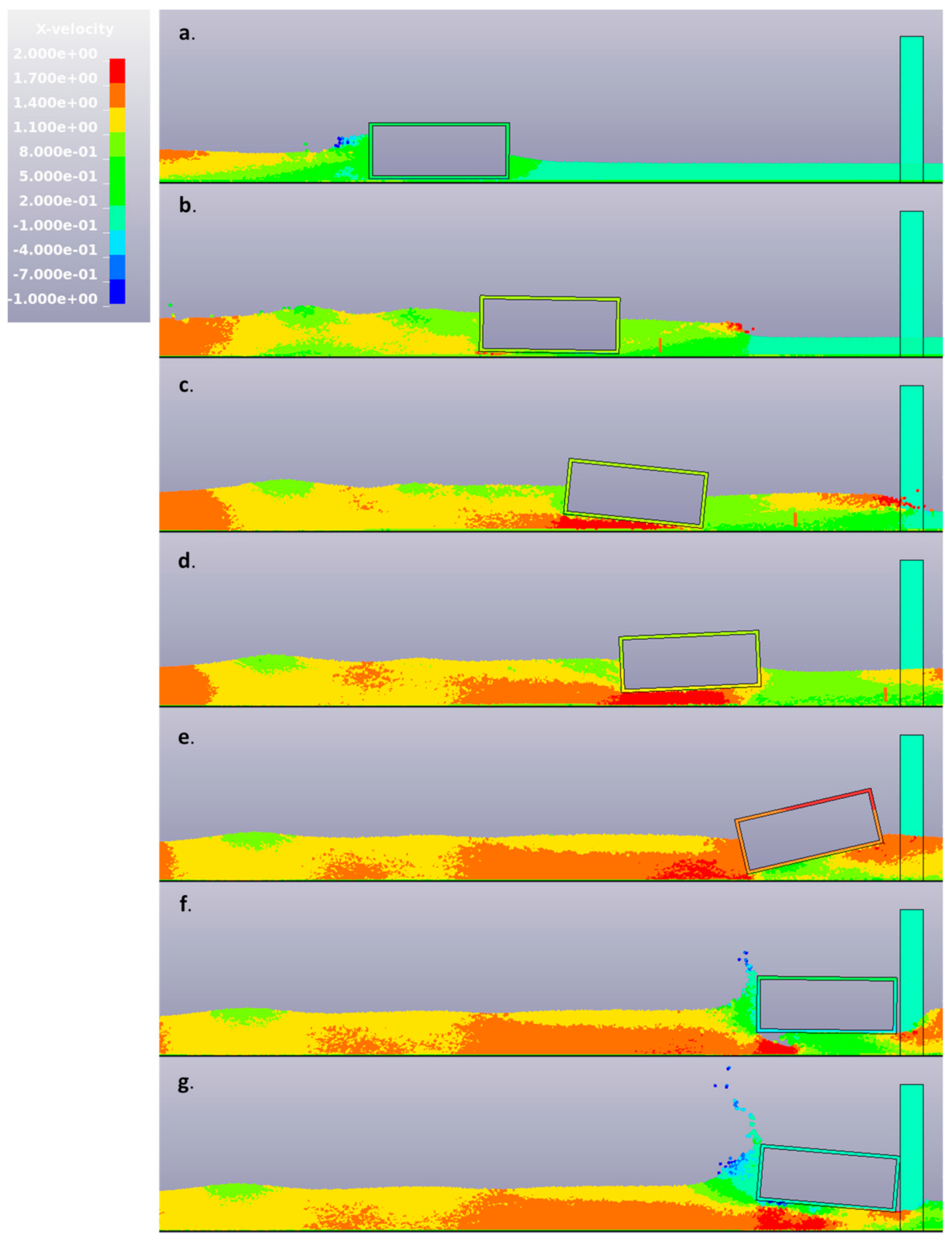
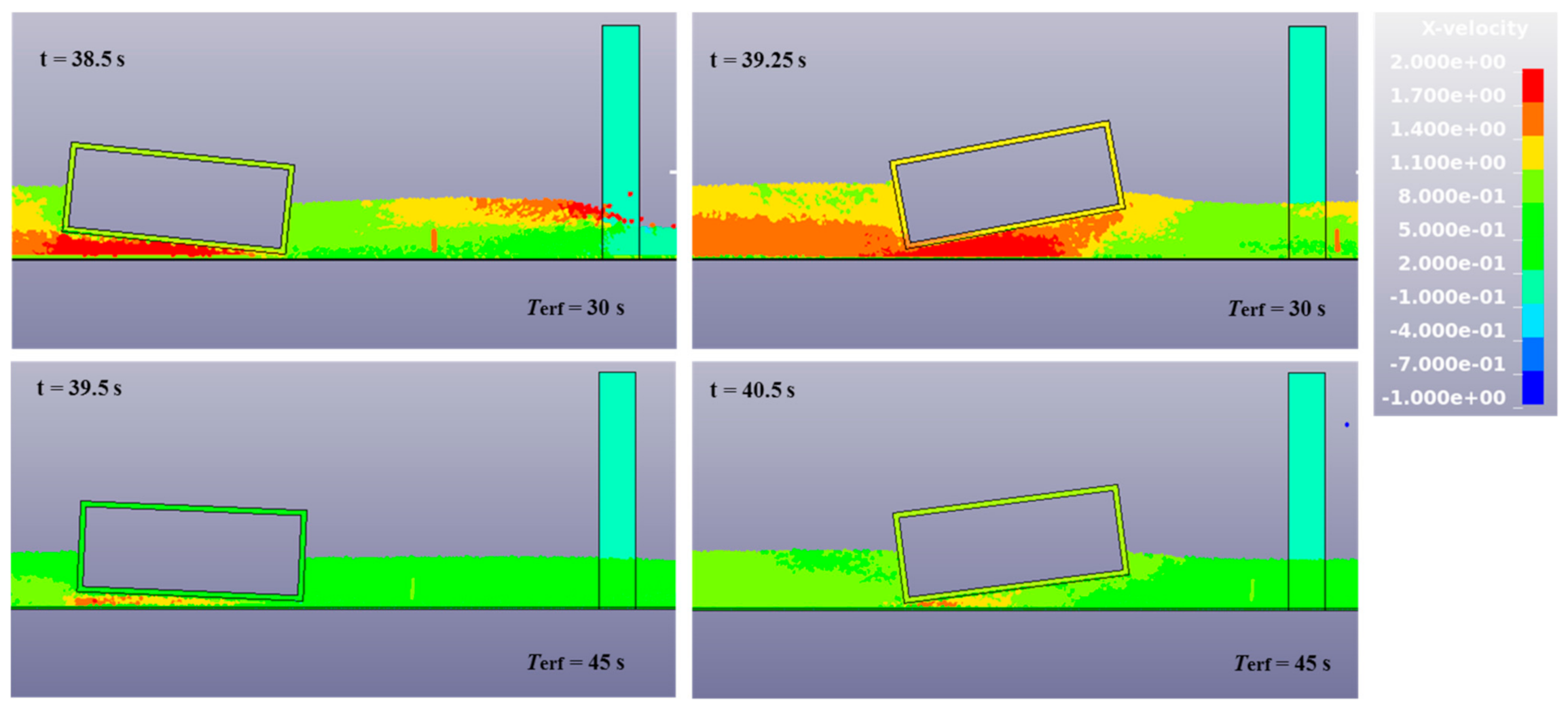
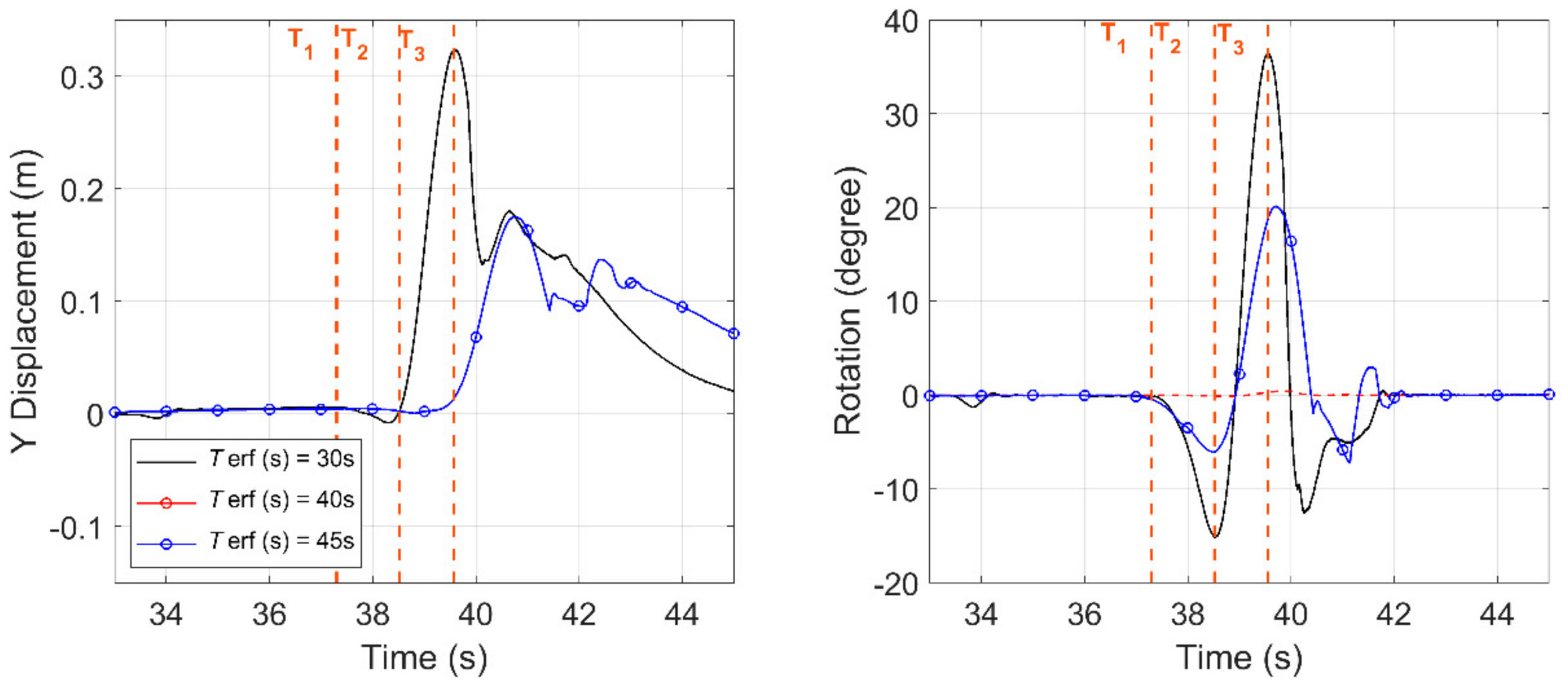
- T1: This time instant represents the initiation of the debris rotation. It occurs slightly after the tsunami has started pushing the debris inland. After that initial contact with the bore, the debris starts accelerating and as the flow below the debris increases and the bore front surpasses the debris, the latter one starts rotating clockwise (see also snapshots b. and c. in Figure 10).
- T2: This instant corresponds to the largest clockwise rotation, at which point the lower right (onshore) corner has displaced downward so much that it impacts the floor of the flume. When this impact takes place, a restoring force is applied to the debris causing it to start rotating in the opposite direction (counter-clockwise).
- T3: After the primary debris impact on the flume floor and the initiation of the counter-clockwise rotation, the debris continues rotating in this direction until it reaches the maximum pitch angle, which tends to occur slightly before the primary debris impact on the column. At this instant, it is possible for the lower left (offshore) corner of the debris to touch the floor of the flume before it impacts the column. However, this will depend on the initial relative distance between the debris and the coastal structure, as well as, the hydrodynamic conditions. This means that instant T3 represents the maximum clockwise pitching angle, which might be close to the impact angle, but not necessarily the same. Future studies should investigate different debris–structure relative distances, and a larger range of hydrodynamic conditions in order to determine the dependence of the maximum pitching angle and the impact angle on these parameters. Ideally, such studies should employ three-dimensional models, which are expected to be more accurate than two-dimensional models.
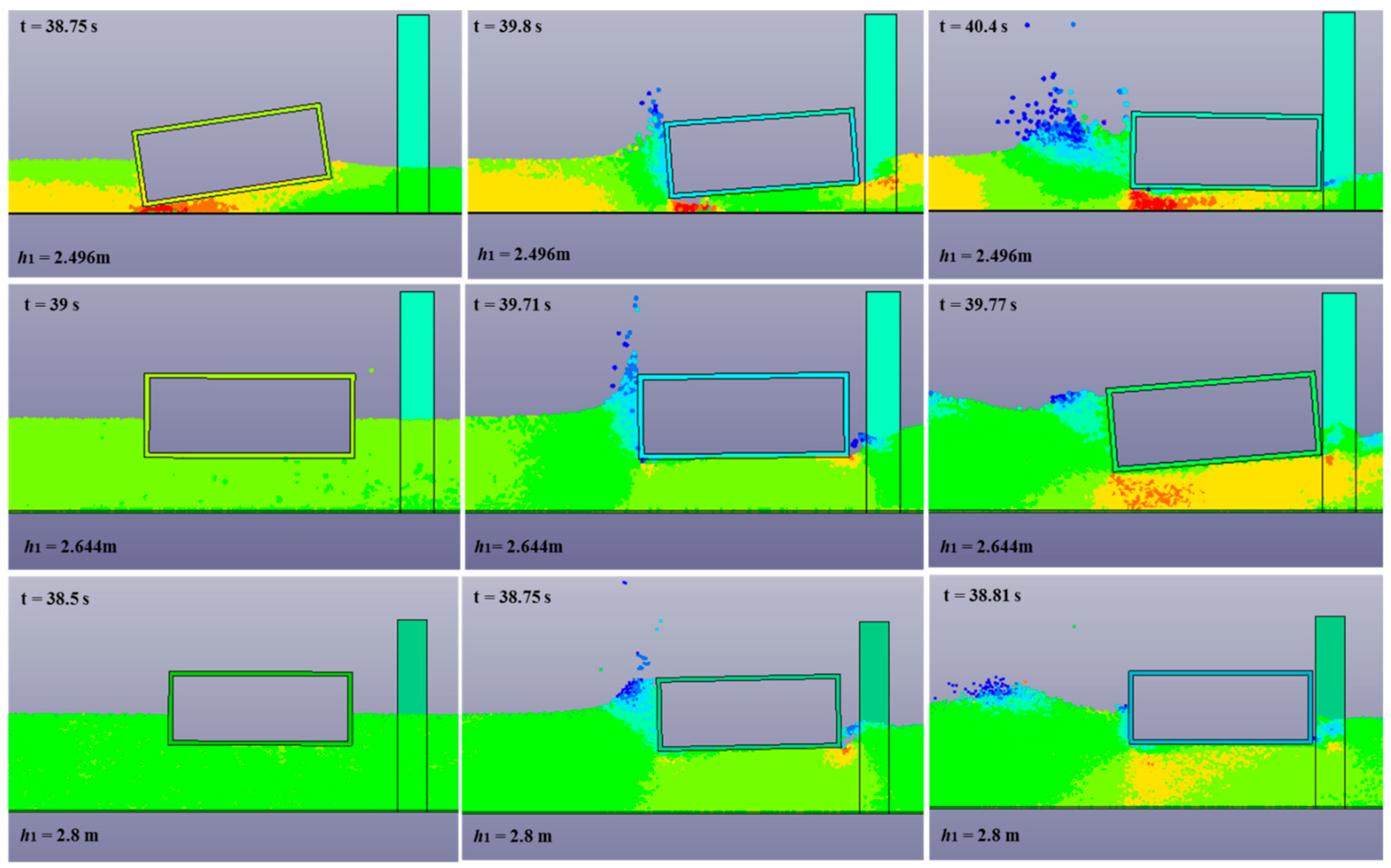
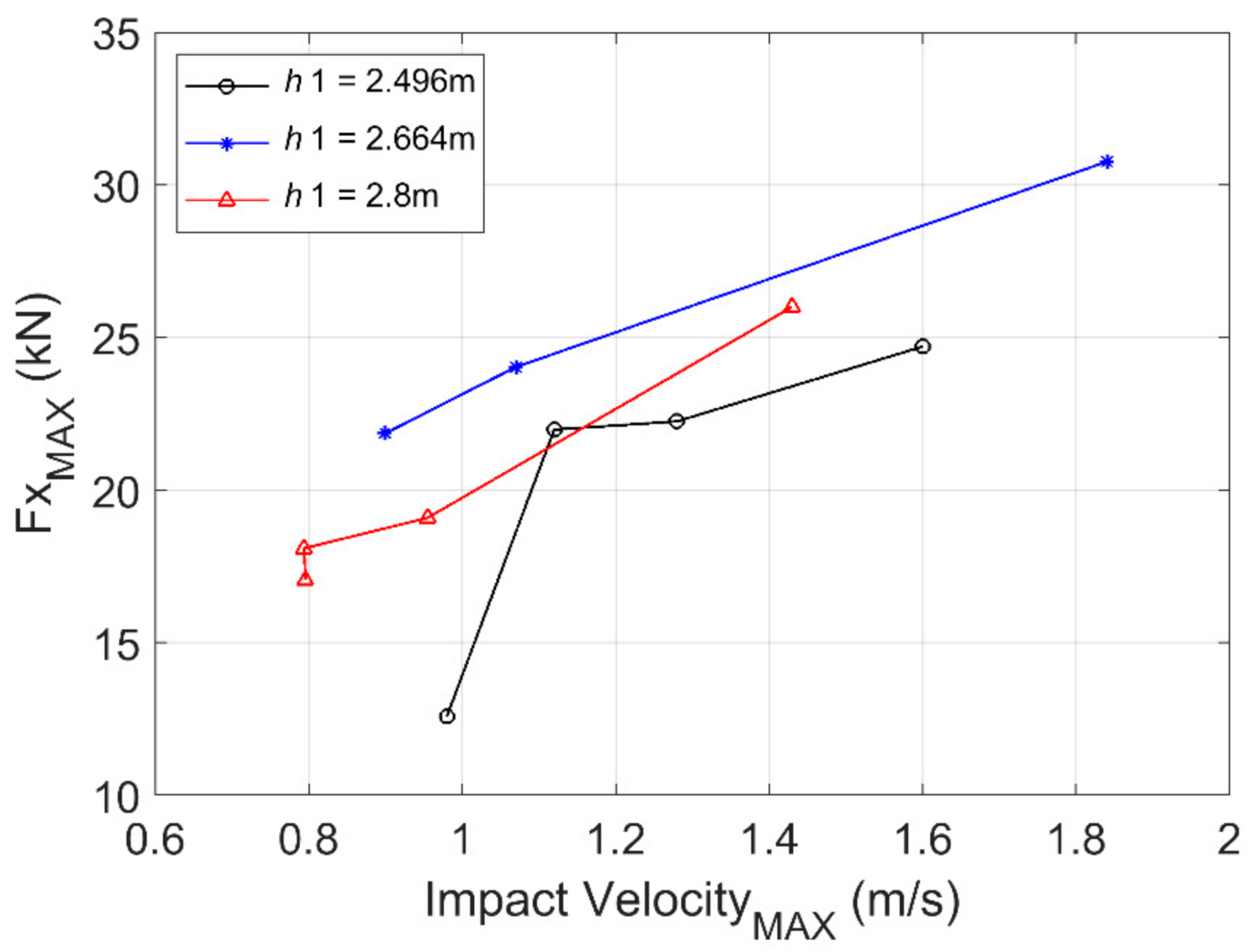
6.2. Initial Water Depth
7. Summary and Conclusions
- The free surface and fluid velocities had good agreement with the experimentally recorded results, both offshore and during the wave propagation along the slope. The deviation of the maximum wave height from the average value of the experimental tests ranged between 4% and 15.2%, while the deviation of the maximum fluid velocities was between 2% and 22%, depending on the location along the flume and the tsunami flow. These results showed that the numerical model can predict the relative increase in the free surface and fluid velocities as the wave propagates over the sloped part and undergoes a non-linear transformation, indicating that the fluid–flume contact worked properly.
- The SPH–FEM models estimate similar debris velocities with the experiments, especially when the bore reaches the container and starts transporting it. However, as the debris propagation inland continues, the numerical model tends to accelerate more and reach an impact velocity that is approximately 20% larger than in the experiments, leading consequently to some differences in the arrival time at the column location. One possible explanation for these differences lies in the 2D formulation of the current numerical model, which implies that the pressures applied from the bore on the offshore face of the debris is uniform across the debris width, which is not necessarily the case in real 3D environments.
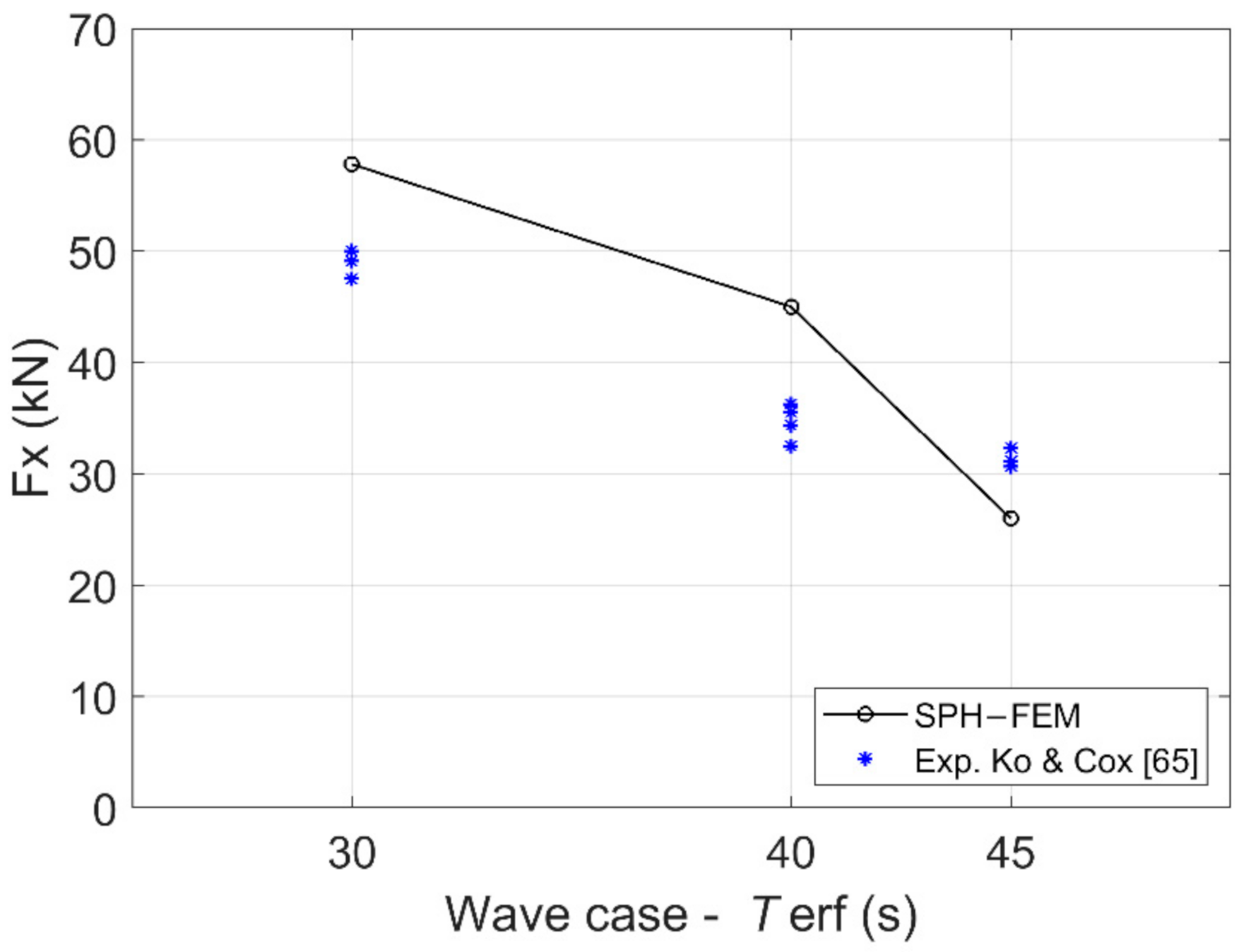
- The deviation of the numerically predicted maximum debris impact forces on the column from the experimental data was in the range of 14–25% for the investigated hydrodynamic flows. However, these differences are consistent with the observed differences in the debris impact velocities. Overall, the numerical results presented similar trends with the physical tests since both gave larger impact forces for the more transient and faster tsunami flows.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A



References
- Yeh, H.; Sato, S.; Tajima, Y. The 11 March 2011 East Japan earthquake and tsunami: Tsunami effects on coastal infrastructure and buildings. Pure Appl. Geophys. 2013, 170, 1019–1031. [Google Scholar] [CrossRef]
- Earthquake Engineering Research Center (EERI). The Tohoku, Japan, Tsunami of March 11, 2011: Effects on Structures, Special Earthquake Report; EERI: CA, USA, 2011; Available online: https://www.eeri.org/images/archived/wp-content/uploads/Tohoku_Japan_March_11_2011_EERI_LFE_ASCE_Tsunami_effects_on-Buildingssmallpdf.com-1.pdf (accessed on 20 September 2021).
- FEMA P646. Guidelines for Design of Structures for Vertical Evacuation from Tsunami; Federal Emergency Management Agency: Washington, DC, USA, 2012.
- Takahashi, S. Urgent survey for 2011 great east Japan earthquake and tsunami disaster in ports and coasts. Tech. Note Port Airpt. Res. Inst. 2011, 1231, 75–78. [Google Scholar]
- Mikami, T.; Shibayama, T.; Esteban, M.; Matsumaru, R. Field survey of the 2011 Tohoku earthquake and tsunami in Miyagi and Fukushima prefectures. Coast. Eng. J. 2012, 54, 1250011-1–1250011-26. [Google Scholar] [CrossRef]
- Canadian Association of Earthquake Engineering (CAEE). Reconnaissance Report on the December 26, 2004 Sumatra Earthquake and Tsunami; CAEE: British Columbia, CA, USA, 2005. [Google Scholar]
- Akiyama, M.; Frangopol, D.M.; Strauss, A. Lessons from the 2011 Great East Japan Earthquake: Emphasis on life-cycle structural performance. In Proceedings of the Third International Symposium on Life-Cycle Civil Engineering, Vienna, Austria, 3–6 October 2012; pp. 13–20. [Google Scholar]
- Kawashima, K.; Buckle, I. Structural performance of bridges in the Tohoku-oki earthquake. Earthq. Spectra 2013, 29, 315–338. [Google Scholar] [CrossRef]
- Maruyama, K.; Tanaka, Y.; Kosa, K.; Hosoda, A.; Arikawa, T.; Mizutani, N.; Nakamura, T. Evaluation of tsunami force acting on bridge girders. In Proceedings of the Thirteenth East Asia-Pacific Conference on Structural Engineering and Construction, Sapporor, Japan, 11–13 September 2013; Available online: http://hdl.handle.net/2115/54508 (accessed on 15 July 2021).
- Palermo, D.; Nistor, I.; Nouri, Y.; Cornett, A. Tsunami loading of near-shoreline structures: A primer. Can. J. Civ. Eng. 2009, 36, 1804–1815. [Google Scholar] [CrossRef]
- Foster, A.S.J.; Rossetto, T.; Allsop, W. An experimentally validated approach for evaluating tsunami inundation forces on rectangular buildings. Coast. Eng. 2017, 128, 44–57. [Google Scholar] [CrossRef]
- Honda, T.; Oda, Y.; Ito, K.; Watanabe, M.; Takabatake, T. An experimental study on the tsunami pressure acting on Piloti-type buildings. Coast. Eng. Proc. 2014, 1, 1–11. [Google Scholar] [CrossRef]
- Robertson, I.N.; Riggs, H.R.; Mohamed, A. Experimental results of tsunami bore forces on structures. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Shanghai, China, 6–11 January 2008; pp. 509–517. [Google Scholar] [CrossRef] [Green Version]
- Araki, S.; Ishino, K.; Deguchi, I. Stability of girder bridge against tsunami fluid force. In Proceedings of the 32th International Conference on Coastal Engineering (ICCE), Shanghai, China, 30 June–5 July 2010. [Google Scholar]
- Lau, T.L.; Ohmachi, T.; Inoue, S.; Lukkunaprasit, P. Experimental and Numerical Modeling of Tsunami Force on Bridge Decks; InTech: Rijeka, Croatia, 2011; pp. 105–130. [Google Scholar]
- Hoshikuma, J.; Zhang, G.; Nakao, H.; Sumimura, T. Tsunami-induced effects on girder bridges. In Proceedings of the International Symposium for Bridge Earthquake Engineering in Honor of Retirement of Professor Kazuhiko Kawashima, Tokyo, Japan, March 2013; Available online: https://xueshu.baidu.com/usercenter/paper/show?paperid=a8a299a7f8922c5a6a312b0e8f9ad6b9&site=xueshu_se (accessed on 20 September 2021).
- Istrati, D. Large-Scale Experiments of Tsunami Inundation of Bridges Including Fluid-Structure-Interaction. Ph.D. Thesis, University of Nevada, Reno, NV, USA, 2017. Available online: https://scholarworks.unr.edu//handle/11714/2030 (accessed on 15 July 2021).
- Istrati, D.; Buckle, I.G.; Itani, A.; Lomonaco, P.; Yim, S. Large-scale FSI experiments on tsunami-induced forces in bridges. In Proceedings of the 16th World Conference on Earthquake, 16WCEE, Santiago, Chile, 9–13 January 2017; pp. 9–13. Available online: http://www.wcee.nicee.org/wcee/article/16WCEE/WCEE2017-2579.pdf (accessed on 15 July 2021).
- Chock, G.Y.; Robertson, I.; Riggs, H.R. Tsunami structural design provisions for a new update of building codes and performance-based engineering. Solut. Coast. Disasters 2011, 423–435. [Google Scholar] [CrossRef]
- Azadbakht, M.; Yim, S.C. Simulation and estimation of tsunami loads on bridge superstructures. J. Waterw. Port Coast. Ocean Eng. 2015, 141, 04014031. [Google Scholar] [CrossRef]
- McPherson, R.L. Hurricane Induced Wave and Surge Forces on Bridge Decks. Ph.D. Thesis, Texas A&M University, College Station, TX, USA, 2008. [Google Scholar]
- Xiang, T.; Istrati, D.; Yim, S.C.; Buckle, I.G.; Lomonaco, P. Tsunami loads on a representative coastal bridge deck: Experimental study and validation of design equations. J. Waterw. Port Coast. Ocean Eng. 2020, 146, 04020022. [Google Scholar] [CrossRef]
- Istrati, D.; Buckle, I.G. Effect of fluid-structure interaction on connection forces in bridges due to tsunami loads. In Proceedings of the 30th US-Japan Bridge Engineering Workshop, Washington, DC, USA, 21–23 October 2014; Available online: https://www.pwri.go.jp/eng/ujnr/tc/g/pdf/30/30-10-2_Buckle.pdf (accessed on 15 July 2021).
- Choi, S.J.; Lee, K.H.; Gudmestad, O.T. The effect of dynamic amplification due to a structure’s vibration on breaking wave impact. Ocean Eng. 2015, 96, 8–20. [Google Scholar] [CrossRef]
- Bozorgnia, M.; Lee, J.J.; Raichlen, F. Wave structure interaction: Role of entrapped air on wave impact and uplift forces. In Proceedings of the International Conference on Coastal Engineering, 30 June–5 July 2010. [Google Scholar]
- Seiffert, B.; Hayatdavoodi, M.; Ertekin, R.C. Experiments and computations of solitary-wave forces on a coastal-bridge deck. Part I: Flat plate. Coast. Eng. 2014, 88, 194–209. [Google Scholar] [CrossRef]
- Xu, G.; Cai, C.S.; Chen, Q. Countermeasure of air venting holes in the bridge deck–wave interaction under solitary waves. J. Perform. Constr. Facil. 2017, 31, 04016071. [Google Scholar] [CrossRef]
- Istrati, D.; Buckle, I. Role of trapped air on the tsunami-induced transient loads and response of coastal bridges. Geosciences 2019, 9, 191. [Google Scholar] [CrossRef] [Green Version]
- Istrati, D.; Buckle, I.; Lomonaco, P.; Yim, S. Deciphering the tsunami wave impact and associated connection forces in open-girder coastal bridges. J. Mar. Sci. Eng. 2018, 6, 148. [Google Scholar] [CrossRef] [Green Version]
- Seiffert, B.R.; Cengiz Ertekin, R.; Robertson, I.N. Effect of entrapped air on solitary wave forces on a coastal bridge deck with girders. J. Bridge Eng. 2016, 21, 04015036. [Google Scholar] [CrossRef]
- Rossetto, T.; Peiris, N.; Pomonis, A.; Wilkinson, S.M.; Del Re, D.; Koo, R.; Gallocher, S. The Indian Ocean tsunami of december 26, 2004: Observations in Sri Lanka and Thailand. Nat. Hazards 2007, 42, 105–124. [Google Scholar] [CrossRef]
- Robertson, I.N.; Carden, L.; Riggs, H.R.; Yim, S.; Young, Y.L.; Paczkowski, K.; Witt, D. Reconnaissance following the September 29, 2009 tsunami in Samoa. Res. Rep. 2010. Available online: https://www.eeri.org/site/images/eeri_newsletter/2010_pdf/Samoa-Rpt.pdf (accessed on 15 July 2021).
- Yeom, G.S.; Nakamura, T.; Mizutani, N. Collision analysis of container drifted by runup tsunami using drift collision coupled model. J. Disaster Res. 2009, 4, 441–449. [Google Scholar] [CrossRef]
- Madurapperuma, M.A.K.M.; Wijeyewickrema, A.C. Inelastic dynamic analysis of an RC building impacted by a tsunami water-borne shipping container. J. Earthq. Tsunami 2012, 6, 1250001. [Google Scholar] [CrossRef]
- Como, A.; Mahmoud, H. Numerical evaluation of tsunami debris impact loading on wooden structural walls. Eng. Struct. 2013, 56, 1249–1261. [Google Scholar] [CrossRef]
- Haehnel, R.B.; Daly, S.F. Maximum impact force of woody debris on floodplain structures. J. Hydraul. Eng. 2004, 130, 112–120. [Google Scholar] [CrossRef]
- Ko, H. Hydraulic Experiments on Impact Forces from Tsunami-Driven Debris. Master’s Thesis, Oregon State University, Corvallis, OR, USA, 2013. [Google Scholar]
- Shafiei, S.; Melville, B.W.; Shamseldin, A.Y.; Adams, K.N.; Beskhyroun, S. Experimental investigation of tsunami-borne debris impact force on structures: Factors affecting impulse-momentum formula. Ocean Eng. 2016, 127, 158–169. [Google Scholar] [CrossRef]
- Stolle, J.; Goseberg, N.; Nistor, I.; Petriu, E. Debris impact forces on flexible structures in extreme hydrodynamic conditions. J. Fluids Struct. 2019, 84, 391–407. [Google Scholar] [CrossRef]
- Derschum, C.; Nistor, I.; Stolle, J.; Goseberg, N. Debris impact under extreme hydrodynamic conditions part 1: Hydrodynamics and impact geometry. Coast. Eng. 2018, 141, 24–35. [Google Scholar] [CrossRef]
- Yang, W.C. Study of Tsunami-Induced Fluid and Debris Load on Bridges using the Material Point Method. Ph.D. Thesis, University of Washington, Seattle, WA, USA, 2016. Available online: http://hdl.handle.net/1773/37064 (accessed on 15 July 2021).
- Oudenbroek, K.; Naderi, N.; Bricker, J.D.; Yang, Y.; Van der Veen, C.; Uijttewaal, W.; Moriguchi, S.; Jonkman, S.N. Hydrodynamic and debris-damming failure of bridge decks and piers in steady flow. Geosciences 2018, 8, 409. [Google Scholar] [CrossRef] [Green Version]
- Istrati, D.; Hasanpour, A.; Buckle, I. Numerical Investigation of Tsunami-Borne Debris Damming Loads on a Coastal Bridge. In Proceedings of the 17 World Conference on Earthquake Engineering, Sendai, Japan, 13–18 September 2020. [Google Scholar]
- Istrati, D.; Buckle, I.G. Tsunami Loads on Straight and Skewed Bridges—Part 1: Experimental Investigation and Design Recommendations (No. FHWA-OR-RD-21-12). Oregon Department of Transportation. Research Section. 2021. Available online: https://rosap.ntl.bts.gov/view/dot/55988 (accessed on 15 July 2021).
- St-Germain, P.; Nistor, I.; Townsend, R.; Shibayama, T. Smoothed-particle hydrodynamics numerical modeling of structures impacted by tsunami bores. J. Waterw. Port Coast. Ocean Eng. 2014, 140, 66–81. [Google Scholar] [CrossRef]
- Pringgana, G.; Cunningham, L.S.; Rogers, B.D. Modelling of tsunami-induced bore and structure interaction. Proc. Inst. Civ. Eng.-Eng. Comput. Mech. 2016, 169, 109–125. [Google Scholar] [CrossRef] [Green Version]
- Sarfaraz, M.; Pak, A. SPH numerical simulation of tsunami wave forces impinged on bridge superstructures. Coast. Eng. 2017, 121, 145–157. [Google Scholar] [CrossRef]
- Zhu, M.; Elkhetali, I.; Scott, M.H. Validation of OpenSees for tsunami loading on bridge superstructures. J. Bridge Eng. 2018, 23, 04018015. [Google Scholar] [CrossRef]
- Liu, G.R.; Liu, M.B. Smoothed Particle Hydrodynamics: A Meshfree Particle Method; World Scientific: Singapore, 2003. [Google Scholar]
- Violeau, D. Fluid Mechanics and the SPH Method: Theory and Applications; Oxford University Press: Oxford, UK, 2012. [Google Scholar]
- Monaghan, J.J.; Kos, A. Solitary waves on a Cretan beach. J. Waterw. Port Coast. Ocean Eng. 1999, 125, 145–155. [Google Scholar] [CrossRef]
- Colagrossi, A.; Landrini, M. Numerical simulation of interfacial flows by smoothed particle hydrodynamics. J. Comput. Phys. 2003, 191, 448–475. [Google Scholar] [CrossRef]
- Monaghan, J.J.; Kos, A.; Issa, N. Fluid motion generated by impact. J. Waterw. Port Coast. Ocean Eng. 2003, 129, 250–259. [Google Scholar] [CrossRef]
- Crespo, A.J.C.; Gómez-Gesteira, M.; Dalrymple, R.A. 3D SPH simulation of large waves mitigation with a dike. J. Hydraul. Res. 2007, 45, 631–642. [Google Scholar] [CrossRef]
- Pelfrene, J. Study of the SPH Method for Simulation of Regular and Breaking Waves. Master’s Thesis, Gent University, Ghent, Belgium, 2011. [Google Scholar]
- Dalrymple, R.A.; Knio, O.; Cox, D.T.; Gesteira, M.; Zou, S. Using a Lagrangian particle method for deck overtopping. Ocean Wave Meas. Anal. 2002, 1082–1091. [Google Scholar] [CrossRef]
- Gómez-Gesteira, M.; Dalrymple, R.A. Using a three-dimensional smoothed particle hydrodynamics method for wave impact on a tall structure. J. Waterw. Port Coast. Ocean Eng. 2004, 130, 63–69. [Google Scholar] [CrossRef]
- Barreiro, A.; Crespo, A.J.C.; Domínguez, J.M.; Gómez-Gesteira, M. Smoothed particle hydrodynamics for coastal engineering problems. Comput. Struct. 2013, 120, 96–106. [Google Scholar] [CrossRef]
- Altomare, C.; Crespo, A.J.; Domínguez, J.M.; Gómez-Gesteira, M.; Suzuki, T.; Verwaest, T. Applicability of Smoothed Particle Hydrodynamics for estimation of sea wave impact on coastal structures. Coast. Eng. 2015, 96, 1–12. [Google Scholar] [CrossRef]
- Aristodemo, F.; Tripepi, G.; Meringolo, D.D.; Veltri, P. Solitary wave-induced forces on horizontal circular cylinders: Laboratory experiments and SPH simulations. Coast. Eng. 2017, 129, 17–35. [Google Scholar] [CrossRef]
- Gómez-Gesteira, M.; Cerqueiro, D.; Crespo, C.; Dalrymple, R.A. Green water overtopping analyzed with a SPH model. Ocean Eng. 2005, 32, 223–238. [Google Scholar] [CrossRef]
- Yang, Y.; Li, J. SPH-FE-Based Numerical Simulation on Dynamic Characteristics of Structure under Water Waves. J. Mar. Sci. Eng. 2020, 8, 630. [Google Scholar] [CrossRef]
- Hu, D.; Long, T.; Xiao, Y.; Han, X.; Gu, Y. Fluid–structure interaction analysis by coupled FE–SPH model based on a novel searching algorithm. Comput. Methods Appl. Mech. Eng. 2014, 276, 266–286. [Google Scholar] [CrossRef] [Green Version]
- Thiyahuddin, M.I.; Gu, Y.; Gover, R.B.; Thambiratnam, D.P. Fluid–structure interaction analysis of full scale vehicle-barrier impact using coupled SPH–FEA. Eng. Anal. Bound. Elem. 2014, 42, 26–36. [Google Scholar] [CrossRef] [Green Version]
- Ko, H.; Cox, D. OSU: 1-D Hydraulic Experiment, Aluminum, Water depth = 249.6 cm. DesignSafe-CI 2012. [Google Scholar] [CrossRef]
- Hallquist, J.O. LS-DYNA theory manual. Liverm. Softw. Technol. Corp. 2006, 3, 25–31. [Google Scholar]
- Grimaldi, A.; Benson, D.J.; Marulo, F.; Guida, M. Steel structure impacting onto water: Coupled finite element-smoothed-particle-hydrodynamics numerical modeling. J. Aircr. 2011, 48, 1299–1308. [Google Scholar] [CrossRef]
- Panciroli, R.; Abrate, S.; Minak, G.; Zucchelli, A. Hydroelasticity in water-entry problems: Comparison between experimental and SPH results. Compos. Struct. 2012, 94, 532–539. [Google Scholar] [CrossRef]
- Monaghan, J.J. Simulating free surface flows with SPH. J. Comput. Phys. 1994, 110, 399–406. [Google Scholar] [CrossRef]
- Wu, Z. Compactly supported positive definite radial functions. Adv. Comput. Math. 1995, 4, 283–292. [Google Scholar] [CrossRef]
- Monaghan, J.J.; Lattanzio, J.C. A refined particle method for astrophysical problems. Astron. Astrophys. 1985, 149, 135–143. [Google Scholar]
- Gingold, R.A.; Monaghan, J.J. Smoothed particle hydrodynamics: Theory and application to non-spherical stars. Mon. Notices R. Astron. Soc. 1977, 181, 375–389. [Google Scholar] [CrossRef]
- Das, J.; Holm, H. On the improvement of computational efficiency of smoothed particle hydrodynamics to simulate flexural failure of ice. J. Ocean Eng. Mar. Energy 2018, 4, 153–169. [Google Scholar] [CrossRef]
- Petschek, A.G.; Libersky, L.D. Cylindrical smoothed particle hydrodynamics. J. Comput. Phys. 1993, 109, 76–83. [Google Scholar] [CrossRef]
- Monaghan, J.J.; Gingold, R.A. Shock simulation by the particle method SPH. J. Comput. Phys. 1983, 52, 374–389. [Google Scholar] [CrossRef]
- Xu, J.; Wang, J. Node to node contacts for SPH applied to multiple fluids with large density ratio. In Proceedings of the 9th European LS-DYNA Users’ Conference, Manchester, UK, 3 June 2013; pp. 2–4. [Google Scholar]
- Thomas, S.; Cox, D. Influence of finite-length seawalls for tsunami loading on coastal structures. J. Waterw. Port Coast. Ocean Eng. 2012, 138, 203–214. [Google Scholar] [CrossRef]
- Swegle, J.W.; Attaway, S.W.; Heinstein, M.W.; Mello, F.J.; Hicks, D.L. An analysis of smoothed particle hydrodynamics (No. SAND-93-2513). Sandia Natl. Labs 1994. [Google Scholar] [CrossRef] [Green Version]
- American Society of Civil Engineers (ASCE). Minimum Design Loads and Associated Criteria for Buildings and Other Structures; ASCE/SEI 7-16; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2016. [Google Scholar]
- Istrati, D.; Buckle, I.G. Tsunami Loads on Straight and Skewed Bridges—Part 2: Numerical Investigation and Design Recommendations (No. FHWA-OR-RD-21-13). Oregon Department of Transportation. Research Section. 2021. Available online: https://rosap.ntl.bts.gov/view/dot/55947 (accessed on 15 July 2021).
- Stolle, J.; Nistor, I.; Goseberg, N.; Petriu, E. Multiple Debris Impact Loads in Extreme Hydrodynamic Conditions. J. Waterw. Port Coast. Ocean Eng. 2020, 146, 04019038. [Google Scholar] [CrossRef]
- Goseberg, N.; Stolle, J.; Nistor, I.; Shibayama, T. Experimental analysis of debris motion due the obstruction from fixed obstacles in tsunami-like flow conditions. Coast. Eng. 2016, 118, 35–49. [Google Scholar] [CrossRef]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasanpour, A.; Istrati, D.; Buckle, I. Coupled SPH–FEM Modeling of Tsunami-Borne Large Debris Flow and Impact on Coastal Structures. J. Mar. Sci. Eng. 2021, 9, 1068. https://doi.org/10.3390/jmse9101068
Hasanpour A, Istrati D, Buckle I. Coupled SPH–FEM Modeling of Tsunami-Borne Large Debris Flow and Impact on Coastal Structures. Journal of Marine Science and Engineering. 2021; 9(10):1068. https://doi.org/10.3390/jmse9101068
Chicago/Turabian StyleHasanpour, Anis, Denis Istrati, and Ian Buckle. 2021. "Coupled SPH–FEM Modeling of Tsunami-Borne Large Debris Flow and Impact on Coastal Structures" Journal of Marine Science and Engineering 9, no. 10: 1068. https://doi.org/10.3390/jmse9101068