

Detecting Maritime GPS Spoofing Attacks Based on NMEA Sentence Integrity Monitoring
 ,
,
Abstract
:1. Introduction
- We identify GPS spoofing detection methods from the literature that can operate on data provided by the NMEA-0183 and can be implemented at low cost;
- we propose a MAritime Nmea-based Anomaly detection framework (MANA) that incorporates these methods;
- we generate and provide an extensive dataset including diverse spoofing attacks; and
- we finally evaluate and compare the effectiveness of spoofing detection methods and demonstrate the potential of their combination to compensate for each other’s weaknesses.
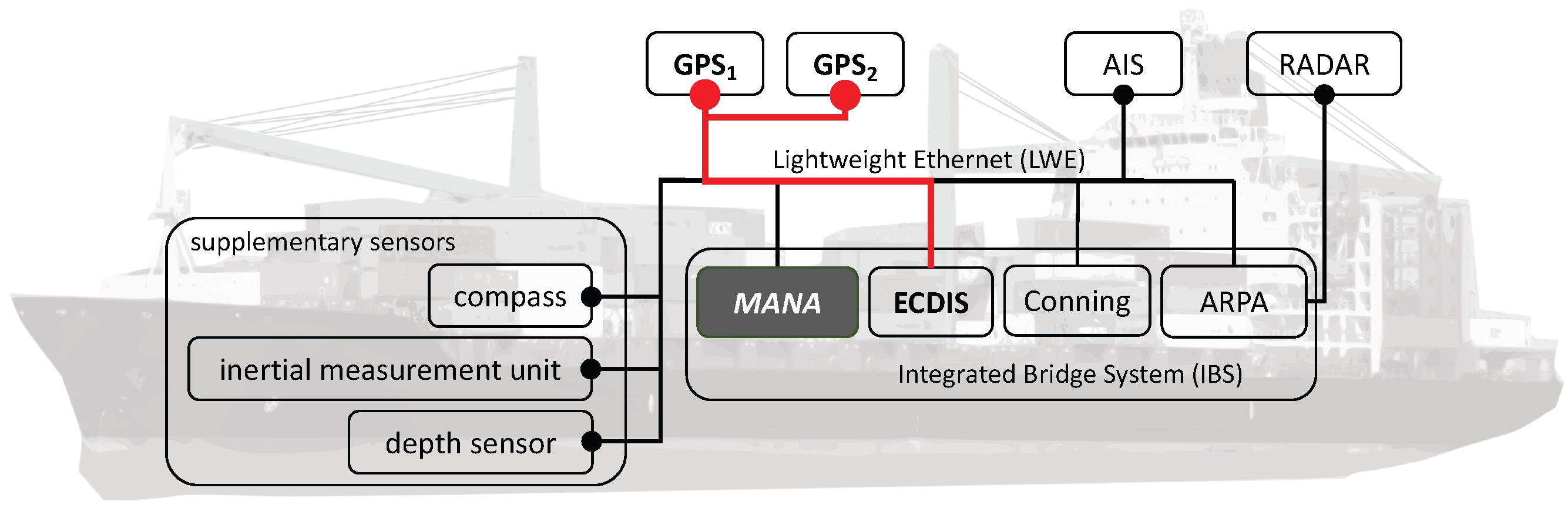
2. Maritime Systems on Board Vessels
2.1. GPS Dependency of Nautical Electronics
2.2. NMEA-0183 and Maritime System Networks
3. GPS Spoofing
3.1. Maritime GPS Spoofing
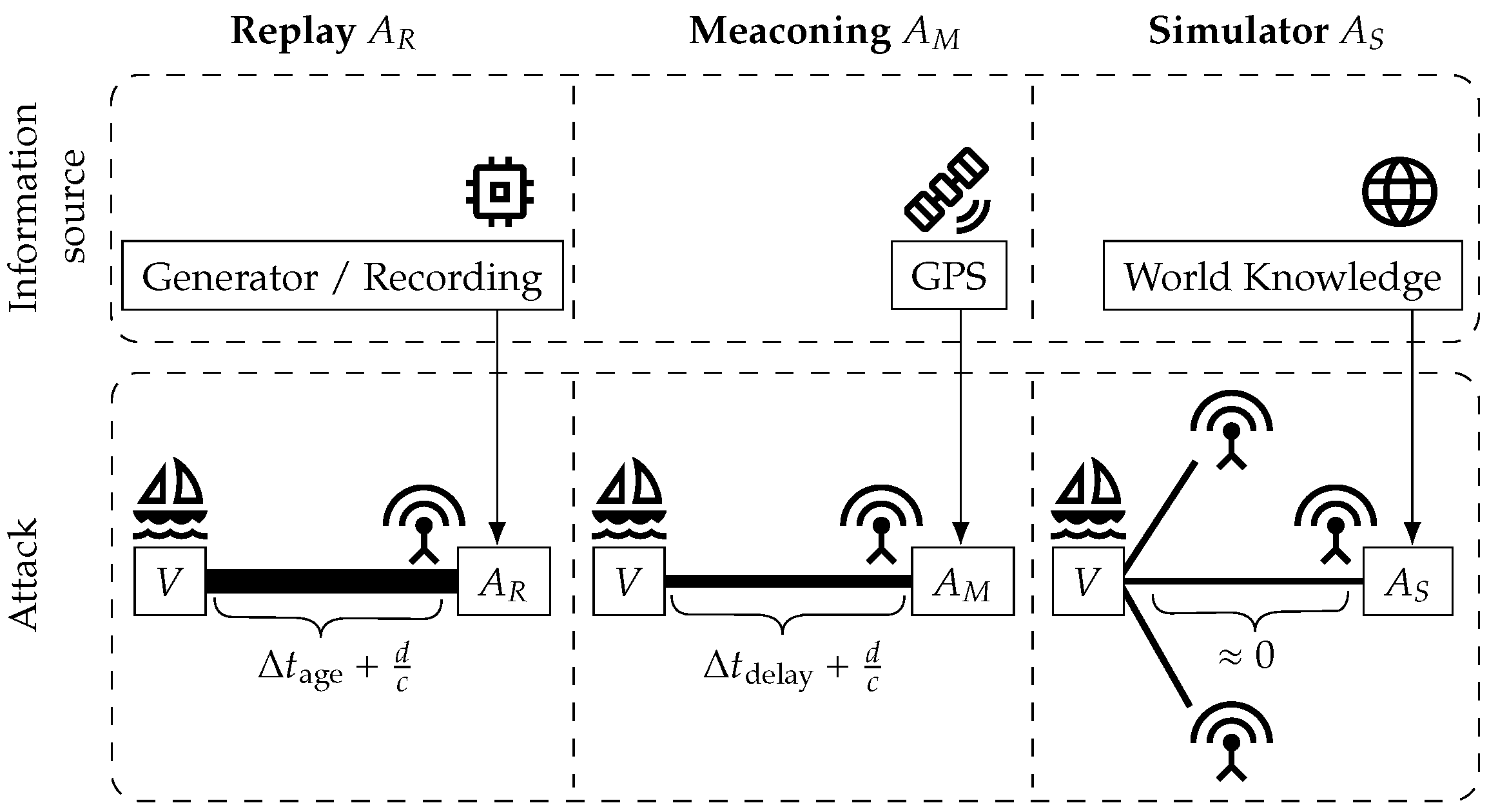
3.2. Attack Model and Scenarios
4. GPS Spoofing Detection
4.1. Software Controls and Related Work
4.2. Complementary Approaches
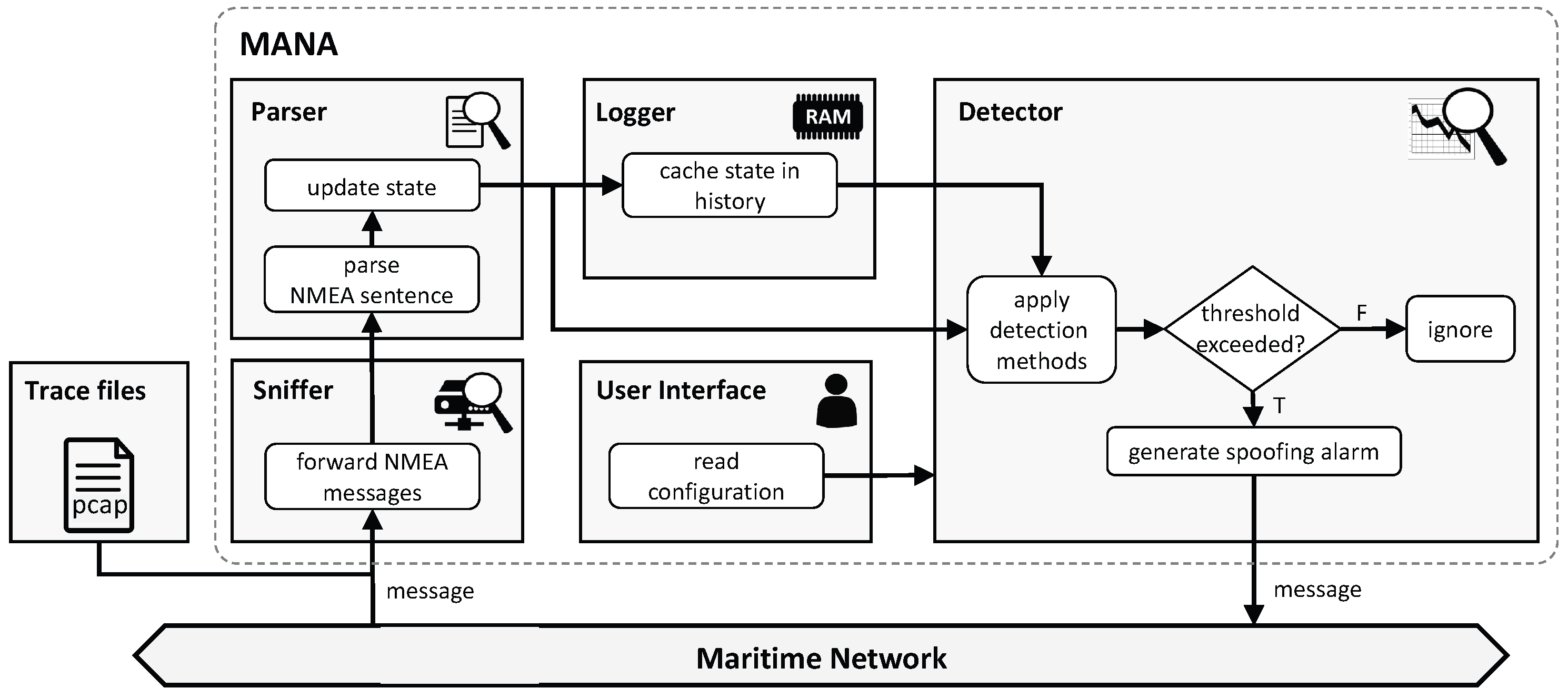
5. NMEA-Based GPS Spoofing Detection Framework
5.1. Concept of MANA
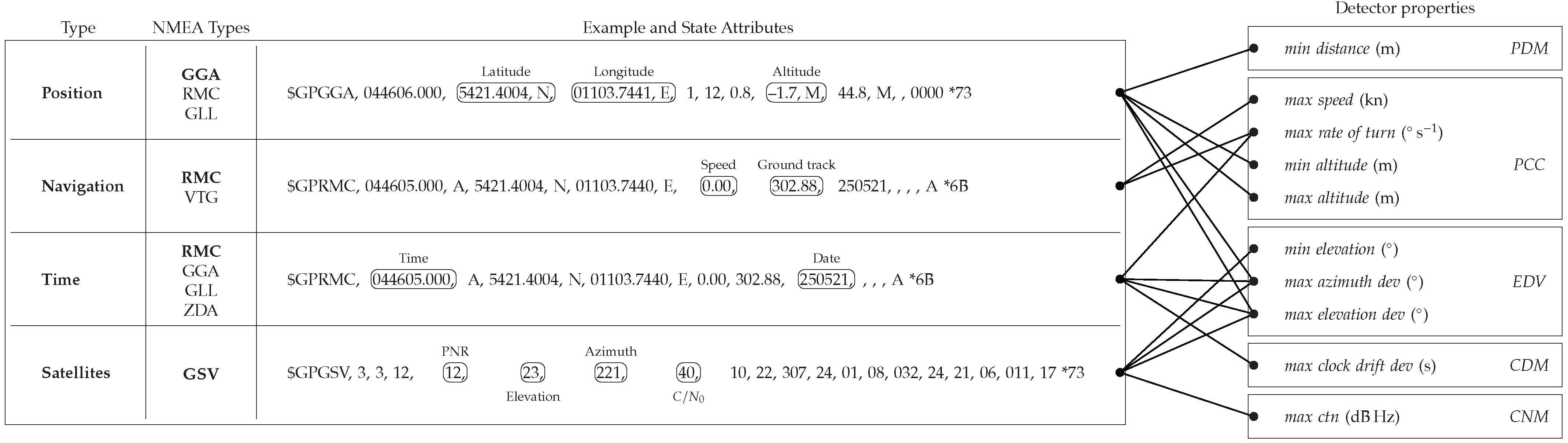
5.2. Methods for NMEA-Based Detection
6. Simulation Environment and Dataset
6.1. Simulation Environment
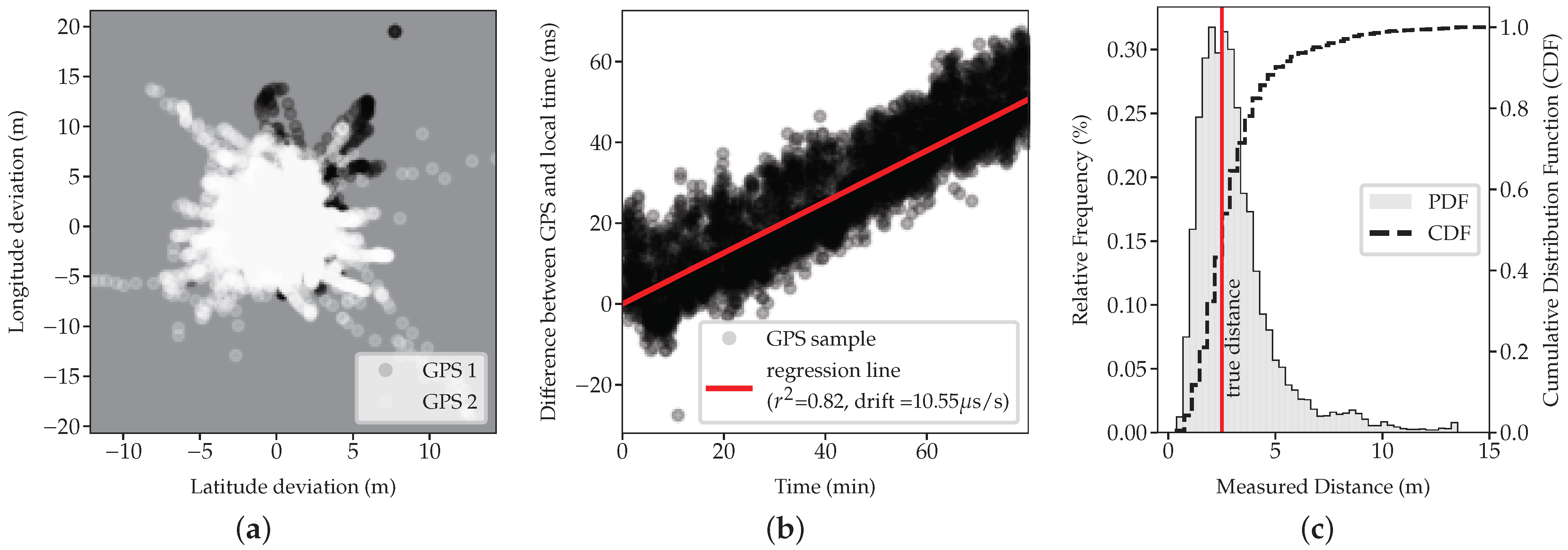
6.1.1. Modeling GPS Errors
6.1.2. Modeling Clock Drift
6.1.3. Calibrating Detection Thresholds
6.2. MARSIM Dataset
- replays a recording with a certain age of a ship that followed a similar route as the victim but shifted eastward by a specified distance.
- performs a meaconing attack with a delay to its own static position. The attacker is thereby located relative to the victim at a distance to the east at the onset of the attack.
- finally constructs signals that will slowly shift the victim’s position with a velocity defined by shift speed and an azimuth angle of shift angle.
7. Performance Evaluation
7.1. Methodology and Metrics
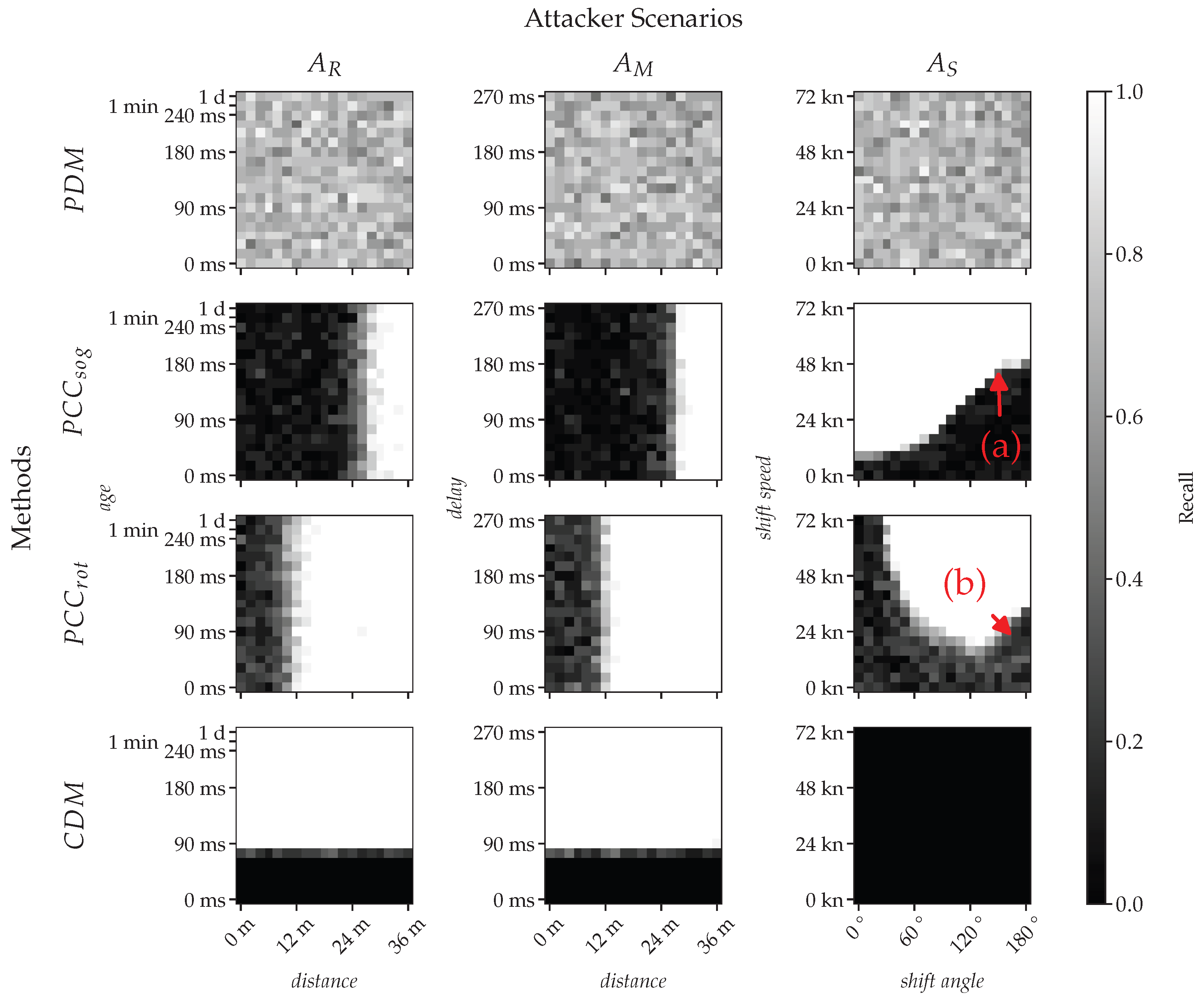
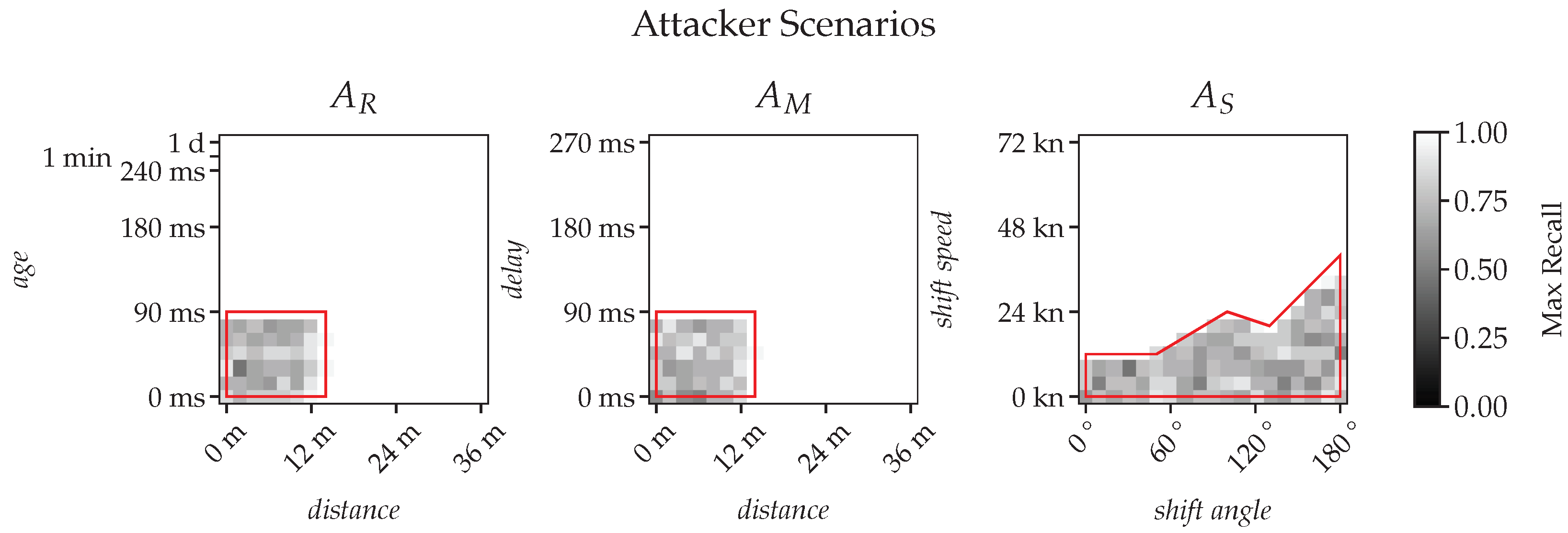
7.2. Evaluation Results
7.2.1. Ensemble of Methods
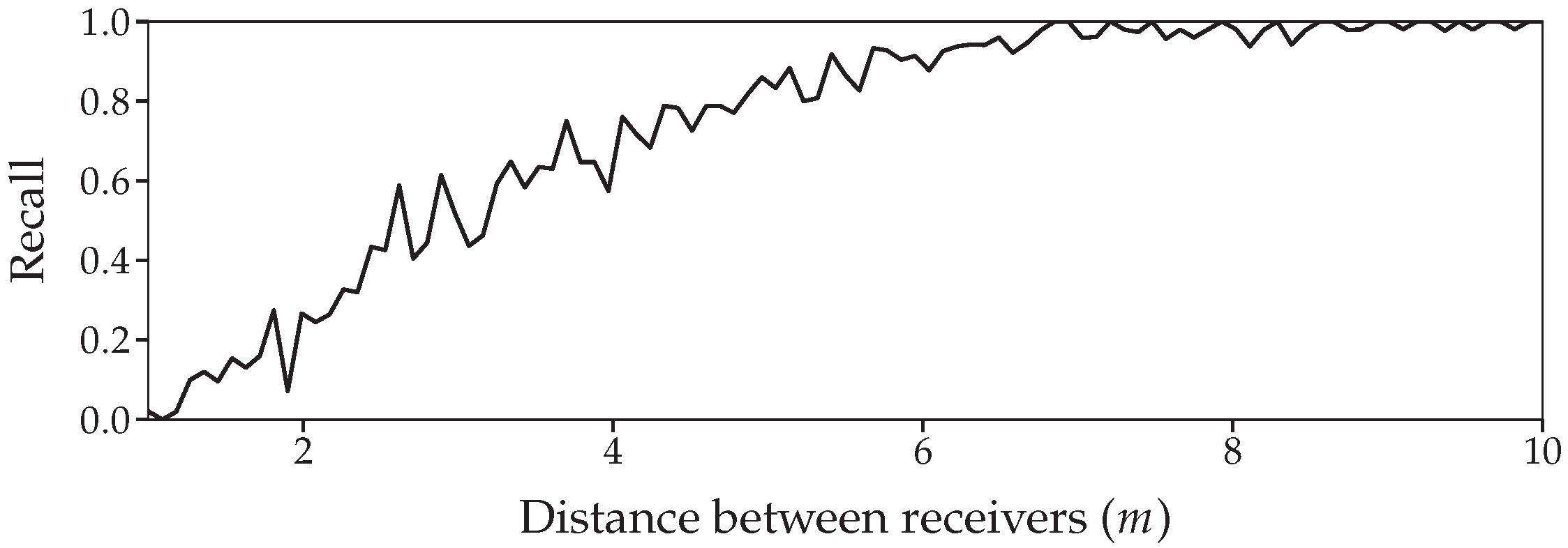
7.2.2. Impact of Distance between Receivers on PDM
8. Discussion and Outlook
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AIS | automatic identification system |
| APT | auxiliary peak tracking |
| ARPA | automatic radar plotting aid |
| coarse/acquisition code | |
| CDM | Clock Drift Monitoring |
| CEMA | cyber and electromagnetic activities |
| carrier-to-noise density | |
| CNM | Monitoring |
| DOA | direction of arrival |
| ECDIS | electronic chart display and information system |
| EDV | Ephemeris Data Validation |
| GNSS | global navigation satellite system |
| GPS | Global Positioning System |
| IEC | International Electrotechnical Commission |
| IBS | integrated bridge system |
| IMO | International Maritime Organization |
| LWE | Lightweight Ethernet |
| MANA | MAritime Nmea-based Anomaly detection |
| MARSIM | MARitime SIMulated |
| MCS | Maritime Cyber Security |
| NAVSTAR | Navigational Satellite Timing and Ranging |
| NMEA | National Marine Electronics Association |
| PCC | Physical Cross-Check |
| PDM | Pairwise Distance Monitoring |
| PLMN | Public Land Mobile Network |
| PNT | positioning, navigation, and timing |
| PRN | pseudo-random noise |
| RAIM | Receiver Autonomous Integrity Monitoring |
| ROT | rate of turn |
| SOG | speed over ground |
| TLE | two-line element |
| TOA | time of arrival |
| UAV | unmanned aerial vehicle |
| VDES | Very high frequency Data Exchange System |
References
- Tam, K.; Jones, K. Factors Affecting Cyber Risk in Maritime. In Proceedings of the International Conference on Cyber Situational Awareness, Data Analytics and Assessment (Cyber SA), Oxford, UK, 3–4 June 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Androjna, A.; Perkovic, M. Impact of Spoofing of Navigation Systems on Maritime Situational Awareness. Trans. Marit. Sci. 2021, 10, 361–373. [Google Scholar] [CrossRef]
- Bhatti, J.; Humphreys, T.E. Hostile Control of Ships Via False GPS Signals: Demonstration and Detection. J. Inst. Navig. 2017, 64, 51–66. [Google Scholar] [CrossRef]
- Motallebighomi, M.; Sathaye, H.; Singh, M.; Ranganathan, A. Cryptography Is Not Enough: Relay Attacks on Authenticated GNSS Signals. arXiv 2022, arXiv:2204.11641v3. [Google Scholar] [CrossRef]
- Jafarnia-Jahromi, A.; Broumandan, A.; Nielsen, J.; Lachapelle, G. GPS Vulnerability to Spoofing Threats and a Review of Antispoofing Techniques. Int. J. Navig. Obs. 2012, 2012, 127072. [Google Scholar] [CrossRef]
- Jansen, K.; Tippenhauer, N.O.; Pöpper, C. Multi-Receiver GPS Spoofing Detection: Error Models and Realization. In Proceedings of the Conference on Computer Security Applications (ACSAC), Los Angeles, CA, USA, 5–8 December 2016; pp. 237–250. [Google Scholar] [CrossRef]
- Tippenhauer, N.O.; Pöpper, C.; Rasmussen, K.B.; Capkun, S. On the Requirements for Successful GPS Spoofing Attacks. In Proceedings of the International Conference on Computer and Communications Security (CCS), Chicago, IL, USA, 17–21 October 2011; pp. 75–86. [Google Scholar] [CrossRef]
- Psiaki, M.L.; Humphreys, T.E. GNSS Spoofing and Detection. Proc. IEEE 2016, 104, 1258–1270. [Google Scholar] [CrossRef]
- Meng, L.; Yang, L.; Yang, W.; Zhang, L. A Survey of GNSS Spoofing and Anti-Spoofing Technology. Remote Sens. 2022, 14, 4826. [Google Scholar] [CrossRef]
- Januszewski, J. Shipborne satellite navigation systems receivers, exploitation remarks. Sci. J. Marit. Universiy Szczec. 2014, 40, 67–72. [Google Scholar]
- Lund, M.S.; Gulland, J.E.; Hareide, O.S.; Jøsok, Ø.; Weum, K.O.C. Integrity of Integrated Navigation Systems. In Proceedings of the Conference on Communications and Network Security (CNS), Beijing, China, 30 May–1 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Hemminghaus, C.; Bauer, J.; Wolsing, K. SIGMAR: Ensuring Integrity and Authenticity of Maritime Systems using Digital Signatures. In Proceedings of the International Symposium on Networks, Computers and Communications (ISNCC), Dubai, United Arab Emirates, 31 October–2 November 2021. [Google Scholar] [CrossRef]
- Rødseth, Ø.J.; Christensen, M.J.; Lee, K. Design challenges and decisions for a new ship data network. In Proceedings of the International Symposium on International Symposium Information on Ships (ISIS), Berlin, Germany, 27–28 September 2011; pp. 149–168. [Google Scholar]
- BBC News. Suez Blockage Is Holding Up $9.6 bn of Goods a Day. 2021. Available online: https://www.bbc.com/news/business-56533250 (accessed on 17 March 2023).
- Androjna, A.; Brcko, T.; Pavic, I.; Greidanus, H. Assessing Cyber Challenges of Maritime Navigation. J. Mar. Sci. Eng. 2020, 8, 776. [Google Scholar] [CrossRef]
- IEC. Maritime Navigation and Radiocommunication Equipment and Systems–Digital Interfaces–Part 450: Multiple Talkers and Multiple Listeners–Ethernet Interconnection (IEC 61162-450:2018); International Electrotechnical Commission (IEC): Geneva, Switzerland, 2018. [Google Scholar]
- Warner, J.S.; Johnston, R.G. GPS Spoofing Countermeasures; Technical Report LAUR-03-6163; Vulnerability Assessment Team, Los Alamos National Laboratory: Los Alamos, NM, USA, 2003.
- Ranganathan, A.; Ólafsdóttir, H.; Capkun, S. SPREE: A Spoofing Resistant GPS Receiver. In Proceedings of the Conference on Mobile Computing and Networking (MobiCom), New York, NY, USA, 3–7 October 2016; pp. 348–360. [Google Scholar] [CrossRef]
- Medina, D.; Lass, C.; Marcos, E.P.; Ziebold, R.; Closas, P.; García, J. On GNSS Jamming Threat from the Maritime Navigation Perspective. In Proceedings of the 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Caprolu, M.; Pietro, R.D.; Raponi, S.; Sciancalepore, S.; Tedeschi, P. Vessels Cybersecurity: Issues, Challenges, and the Road Ahead. IEEE Commun. Mag. 2020, 58, 90–96. [Google Scholar] [CrossRef]
- Awan, M.S.K.; Al Ghamdi, M.A. Understanding the Vulnerabilities in Digital Components of An Integrated Bridge System (IBS). J. Mar. Sci. Eng. 2019, 7, 350. [Google Scholar] [CrossRef]
- Burgess, M. When a Tanker Vanishes, All the Evidence Points to Russia. 2017. Available online: https://www.wired.co.uk/article/black-sea-ship-hacking-russia (accessed on 17 March 2023).
- Wu, J.; Thorne-Large, J.; Zhang, P. Safety First: The Risk of Over-Reliance on Technology in Navigation. J. Transp. Saf. Secur. 2021, 14, 1220–1246. [Google Scholar] [CrossRef]
- Maritime Safety Committee (MSC). Resolution MSC.915(22)–Revised Maritime Policy and Requirements for a Future Global Navigation Satellite System (GNSS); MSC 915(22); International Maritime Organization (IMO): London, UK, 2001. [Google Scholar]
- Zalewski, P. GNSS Integrity Concepts for Maritime Users. In Proceedings of the European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Department of Homeland Security. Resilient Positioning, Navigation, and Timing (PNT) Conformance Framework Version 2.0. 2022. Available online: https://www.dhs.gov/sites/default/files/2022-05/22_0531_st_resilient_pnt_conformance_framework_v2.0.pdf (accessed on 20 April 2023).
- Warner, J.S.; Johnston, R.G. A simple demonstration that the global positioning system (GPS) is vulnerable to spoofing. J. Secur. Adm. 2002, 25, 19–27. [Google Scholar]
- Coulon, M.; Chabory, A.; Garcia-Pena, A.; Vezinet, J.; Macabiau, C.; Estival, P.; Ladoux, P.; Roturier, B. Characterization of Meaconing and its Impact on GNSS Receivers. In Proceedings of the Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+), Online, 21–25 September 2020; pp. 3713–3737. [Google Scholar] [CrossRef]
- Lenhart, M.; Spanghero, M.; Papadimitratos, P. DEMO: Relay/replay attacks on GNSS signals. arXiv 2022, arXiv:2202.10897. [Google Scholar] [CrossRef]
- Key, E.L. Techniques to Counter GPS Spoofing. Internal Memorandum; MITRE Corporation: Mclean, VA, USA, 1995. [Google Scholar]
- Brown, R.G. Receiver Autonomous Integrity Monitoring. In Global Positioning System: Theory and Applications; Parkinson, B., Spilker, J., Eds.; AIAA Inc.: Washington, DC, USA, 1996; Volume 2, Chapter 5; pp. 143–165. [Google Scholar]
- Scott, L. Anti-Spoofing & Authenticated Signal Architectures for Civil Navigation Systems. In Proceedings of the Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–12 September 2003; pp. 1543–1552. [Google Scholar]
- Kerns, A.J.; Wesson, K.D.; Humphreys, T.E. A blueprint for civil GPS navigation message authentication. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2014; pp. 262–269. [Google Scholar] [CrossRef]
- Wen, H.; Huang, P.Y.R.; Dyer, J.; Archinal, A.; Fagan, J. Countermeasures for GPS signal spoofing. In Proceedings of the Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS), Long Beach, CA, USA, 13–16 September 2005; Volume 5, pp. 13–16. [Google Scholar]
- Akos, D.M. Who’s Afraid of the Spoofer? GPS/GNSS Spoofing Detection via Automatic Gain Control (AGC). Navigation 2012, 59, 281–290. [Google Scholar] [CrossRef]
- Konovaltsev, A.; Cuntz, M.; Haettich, C.; Meurer, M. Autonomous spoofing detection and mitigation in a GNSS receiver with an adaptive antenna array. In Proceedings of the Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+), Nashville, TN, USA, 16–20 September 2013; pp. 2937–2948. [Google Scholar]
- McDowell, C.E. GPS Spoofer and Repeater Mitigation System Using Digital Spatial Nulling. U.S. Patent 7,250,903, 31 July 2007. [Google Scholar]
- Nielsen, J.; Broumandan, A.; Lachapelle, G. Spoofing Detection and Mitigation with a Moving Handheld Receiver. GPS World 2010, 21, 27–33. [Google Scholar]
- Jafarnia-Jahromi, A.; Broumandan, A.; Nielsen, J.; Lachapelle, G. GPS spoofer countermeasure effectiveness based on signal strength, noise power, and C/N0 measurements. Int. J. Satell. Commun. Netw. 2012, 30, 181–191. [Google Scholar] [CrossRef]
- Li, J.; Zhu, X.; Ouyang, M.; Shen, D.; Chen, Z.; Dai, Z. GNSS spoofing detection technology based on Doppler frequency shift difference correlation. Meas. Sci. Technol. 2022, 33, 095109. [Google Scholar] [CrossRef]
- Chu, F.; Li, H.; Wen, J.; Lu, M. Statistical Model and Performance Evaluation of a GNSS Spoofing Detection Method based on the Consistency of Doppler and Pseudorange Positioning Results. J. Navig. 2019, 72, 447–466. [Google Scholar] [CrossRef]
- Zeng, Q.; Li, H.; Qian, L. GPS spoofing attack on time synchronization in wireless networks and detection scheme design. In Proceedings of the Military Communications Conference (MILCOM), Orlando, FL, USA, 29 October–1 November 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Humphreys, T.E.; Ledvina, B.M.; Psiaki, M.L.; O’Hanlon, B.W.; Kintner, P.M. Assessing the Spoofing Threat: Development of a Portable GPS Civilian Spoofer. In Proceedings of the Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS), Savannah, GA, USA, 16–19 September 2008; pp. 2314–2325. [Google Scholar]
- Lo, S.C.; Enge, P.K. Authenticating aviation augmentation system broadcasts. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Indian Wells, CA, USA, 4–6 May 2010; pp. 708–717. [Google Scholar] [CrossRef]
- Lo, S.; De Lorenzo, D.; Enge, P.; Akos, D.; Bradley, P. Signal authentication: A secure civil GNSS for today. Inside GNSS 2009, 4, 30–39. [Google Scholar]
- Phelts, R.E. Multicorrelator Techniques for Robust Mitigation of Threats to GPS Signal Quality. Ph.D. Theses, Stanford University, Stanford, CA, USA, 2000. [Google Scholar]
- Pini, M.; Fantino, M.; Cavaleri, A.; Ugazio, S.; Presti, L.L. Signal Quality Monitoring Applied to Spoofing Detection. In Proceedings of the Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS), Portland, OR, USA, 20–23 September 2011; pp. 1888–1896. [Google Scholar]
- Miralles, D.; Bornot, A.; Rouquette, P.; Levigne, N.; Akos, D.M.; Chen, Y.H.; Lo, S.; Walter, T. An Assessment of GPS Spoofing Detection Via Radio Power and Signal Quality Monitoring for Aviation Safety Operations. IEEE Intell. Transp. Syst. Mag. 2020, 12, 136–146. [Google Scholar] [CrossRef]
- White, N.A.; Maybeck, P.S.; DeVilbiss, S.L. Detection of interference/jamming and spoofing in a DGPS-aided inertial system. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 1208–1217. [Google Scholar] [CrossRef]
- Wei, X.; Aman, M.N.; Sikdar, B. Light-Weight GPS Spoofing Detection for Synchrophasors in Smart Grids. In Proceedings of the International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Psiaki, M.L.; O’hanlon, B.W.; Powell, S.P.; Bhatti, J.A.; Wesson, K.D.; Humphreys, T.E. GNSS Spoofing Detection using Two-Antenna Differential Carrier Phase. In Proceedings of the Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+), Tampa, FL, USA, 8–12 September 2014. [Google Scholar]
- Dasgupta, S.; Rahman, M.; Islam, M.; Chowdhury, M. A Sensor Fusion-Based GNSS Spoofing Attack Detection Framework for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 23559–23572. [Google Scholar] [CrossRef]
- Lemieszewski, Ł. Transport safety: GNSS spoofing detection using the single-antenna receiver and the speedometer of a vehicle. Procedia Comput. Sci. 2022, 207, 3181–3188. [Google Scholar] [CrossRef]
- Oligeri, G.; Sciancalepore, S.; Ibrahim, O.A.; Di Pietro, R. GPS spoofing detection via crowd-sourced information for connected vehicles. Comput. Netw. 2022, 216, 109230. [Google Scholar] [CrossRef]
- Nighswander, T.; Ledvina, B.; Diamond, J.; Brumley, R.; Brumley, D. GPS Software Attacks. In Proceedings of the International Conference on Computer and Communications Security (CCS), Raleigh, NC, USA, 16–18 October 2012; pp. 450–461. [Google Scholar] [CrossRef]
- Zalewski, P. Real-time GNSS spoofing detection in maritime code receivers. Sci. J. Marit. Univ. Szczec. 2014, 38, 118–124. [Google Scholar]
- Laverty, D.; Kelsey, C.; O’Raw, J. GNSS Time Signal Spoofing Detector for Electrical Substations. In Proceedings of the IEEE Power & Energy Society General Meeting (PESGM), Denver, CO, USA, 17–21 July 2022. [Google Scholar] [CrossRef]
- Whelan, J.; Sangarapillai, T.; Minawi, O.; Almehmadi, A.; El-Khatib, K. Novelty-based Intrusion Detection of Sensor Attacks on Unmanned Aerial Vehicles. In Proceedings of the ACM Symposium on QoS and Security for Wireless and Mobile Networks (Q2SWinet), Alicante, Spain, 16–20 November 2020; pp. 23–28. [Google Scholar] [CrossRef]
- Whelan, J.; Sangarapillai, T.; Minawi, O.; Almehmadi, A.; El-Khatib, K. UAV Attack Dataset. 2020. Available online: https://ieee-dataport.org/open-access/uav-attack-dataset (accessed on 23 April 2023).
- Singh, S.; Singh, J.; Singh, S.; Goyal, S.B.; Raboaca, M.S.; Verma, C.; Suciu, G. Detection and Mitigation of GNSS Spoofing Attacks in Maritime Environments Using a Genetic Algorithm. Mathematics 2022, 10, 4097. [Google Scholar] [CrossRef]
- Lee, D.K.; Miralles, D.; Akos, D.; Konovaltsev, A.; Kurz, L.; Lo, S.; Nedelkov, F. Detection of GNSS Spoofing using NMEA Messages. In Proceedings of the European Navigation Conference (ENC), Dresden, Germany, 23–24 November 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Oligeri, G.; Sciancalepore, S.; Ibrahim, O.A.; Di Pietro, R. Drive Me Not: GPS Spoofing Detection via Cellular Network: (Architectures, Models, and Experiments). In Proceedings of the Conference on Security and Privacy in Wireless and Mobile Networks (WiSec), Miami, FL, USA, 15–17 May 2019; pp. 12–22. [Google Scholar] [CrossRef]
- Johnson, G.; Swaszek, P.; Alberding, J.; Hoppe, M.; Oltmann, J.H. The Feasibility of R-Mode to Meet Resilient PNT Requirements for e-Navigation. In Proceedings of the Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+), Tampa, FL, USA, 8–12 September 2014; pp. 3076–3100. [Google Scholar]
- Koch, P.; Gewies, S. Worldwide Availability of Maritime Medium-Frequency Radio Infrastructure for R-Mode-Supported Navigation. J. Mar. Sci. Eng. 2020, 8, 209. [Google Scholar] [CrossRef]
- Grundhöfer, L.; Rizzi, F.G.; Gewies, S.; Hoppe, M.; Bäckstedt, J.; Dziewicki, M.; Galdo, G.D. Positioning with medium frequency R-Mode. NAVIGATION J. Inst. Navig. 2021, 68, 829–841. [Google Scholar] [CrossRef]
- Naus, K.; Waż, M.; Szymak, P.; Gucma, L.; Gucma, M. Assessment of ship position estimation accuracy based on radar navigation mark echoes identified in an Electronic Navigational Chart. Measurement 2021, 169, 108630. [Google Scholar] [CrossRef]
- Hagen, O.K.; Ånonsen, K.B. Using Terrain Navigation to Improve Marine Vessel Navigation Systems. Mar. Technol. Soc. J. 2014, 48, 45–58. [Google Scholar] [CrossRef]
- Kelso, T.S. Frequently Asked Questions: Two-Line Element Set Format. CelesTrak, Satellite Times. 2004. Available online: http://celestrak.com/columns/v04n03/ (accessed on 17 March 2023).
- Oszczak, B. GNSS positioning algorithms using methods of reference point indicators. Artif. Satell. 2014, 49, 21–23. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spoofing Countermeasure Method | Replay () | Meaconing () | Simulator () | |
|---|---|---|---|---|
| Symmetric encryption of full spreading code (e.g., [8,32]) | ⬤ | ◐ | ◐ | |
| Spread spectrum security code (e.g., [32]) | ⬤ | ◐ | ◐ | |
| System | Navigation message authentication (e.g., [32,33]) | ⬤ | ◐ | ◐ |
| L1/L2 power level comparison (e.g., [34,35]) | ⬤ | ⬤ | ◯ | |
| L1/L2 power level code phase comparison (e.g., [34]) | ⬤ | ⬤ | ◯ | |
| Hardware | DOA monitoring (e.g., [36,37]) | ⬤ | ⬤ | ◐ |
| Synthetic antenna array (e.g., [38]) | ⬤ | ⬤ | ◐ | |
| Signal strength monitoring (e.g., [17,39]) | ⬤ | ◐ | ◯ | |
| Doppler monitoring (e.g., [40,41]) | ⬤ | ⬤ | ◐ | |
| Code and phase rates consistency check (e.g., [34]) | ◐ | ◯ | ◯ | |
| TOA monitoring (e.g., [17,42]) | ◐ | ◐ | ◯ | |
| PRN code and data bit latency (e.g., [43,44,45]) | ⬤ | ◯ | ◯ | |
| Auxiliary peak tracking APT (e.g., [18]) | ◐ | ⬤ | ◐ | |
| Signal quality monitoring (e.g., [46,47,48]) | ◐ | ◐ | ◐ | |
| Firmware | Distribution analysis of correlator output (e.g., [49,50]) | ◐ | ◐ | ◐ |
| Monitoring (CNM) (e.g., [34,39]) | ⬤ | ◐ | ◯ | |
| Physical Cross-Check (PCC) (e.g., [51,52,53,54]) | ◐ | ◐ | ◯ | |
| Clock Drift Monitoring (CDM) (e.g., [8,18]) | ⬤ | ◐ | ◯ | |
| Ephemeris Data Validation (EDV) (e.g., [34,55]) | ⬤ | ◐ | ◯ | |
| Software | Pairwise Distance Monitoring (PDM) (e.g., [7,56]) | ⬤ | ⬤ | ◐ |
| Category | Parameter | Value |
|---|---|---|
| Velocity | 20 kn | |
| Rate of turn | 0.5° s−1 | |
| Ship | Number of GPS receivers | 2 |
| Distance between GPS receivers | 4 m | |
| Distribution | Gaussian | |
| Clock error | 0.0012 | |
| 0.0076 | ||
| Clock drift | Drift per second | 10.55 μs |
| Attacker | Parameter | Parameter Space | |
|---|---|---|---|
| Replay | distance | Physical separation between attacker and victim | |
| age | Age of the replayed recording | ||
| Meaconing | distance | Physical separation between attacker and victim | |
| delay | Time delay introduced by the attacker | ||
| Simulator | shift angle | Azimuth in which the victim’s position is shifted | |
| shift speed | Speed with which the victim’s position is shifted |
| Method | Parameter | Value |
|---|---|---|
| PDM | min distance | 2 m |
| min speed | 15 kn | |
| PCC | max speed | 30 kn |
| max rate of turn | 7.5 ° s−1 | |
| CDM | max clock drift dev | 100 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spravil, J.; Hemminghaus, C.; von Rechenberg, M.; Padilla, E.; Bauer, J. Detecting Maritime GPS Spoofing Attacks Based on NMEA Sentence Integrity Monitoring. J. Mar. Sci. Eng. 2023, 11, 928. https://doi.org/10.3390/jmse11050928
Spravil J, Hemminghaus C, von Rechenberg M, Padilla E, Bauer J. Detecting Maritime GPS Spoofing Attacks Based on NMEA Sentence Integrity Monitoring. Journal of Marine Science and Engineering. 2023; 11(5):928. https://doi.org/10.3390/jmse11050928
Chicago/Turabian StyleSpravil, Julian, Christian Hemminghaus, Merlin von Rechenberg, Elmar Padilla, and Jan Bauer. 2023. "Detecting Maritime GPS Spoofing Attacks Based on NMEA Sentence Integrity Monitoring" Journal of Marine Science and Engineering 11, no. 5: 928. https://doi.org/10.3390/jmse11050928