
The Oscillating Behavior of Trawl Codends Including Various Geometric Configurations of Simulated Catch
 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
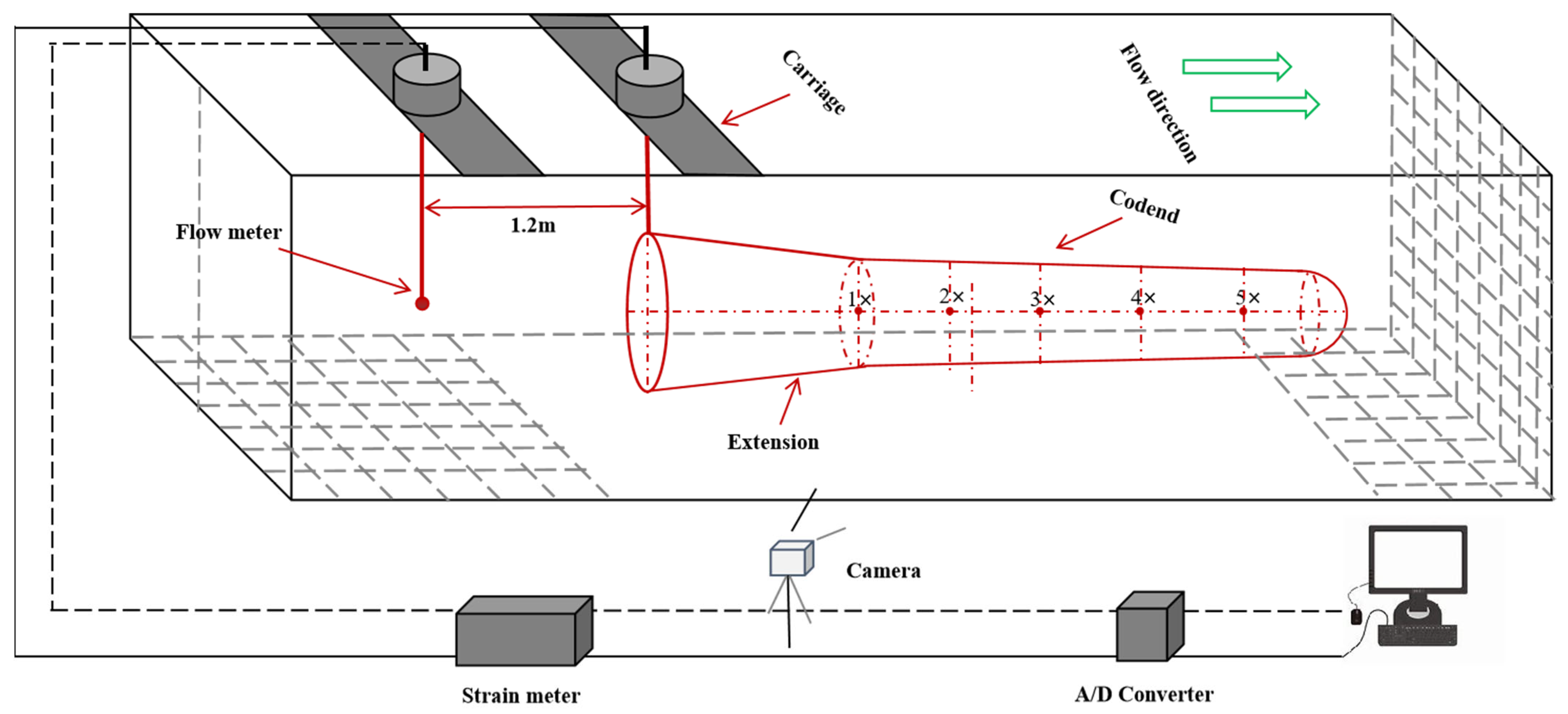
2.1. Evaluation of the Full-Scale Prototype and Data Collection
2.2. Codend Design
2.3. Design of the Simulated Catch Configurations
2.4. Experimental Setup and Procedures
2.5. Data Extraction and Methods
2.5.1. Data Processing of the Shape of Codend
2.5.2. Pearson Correlation Test
2.5.3. Wavelet Analysis
3. Results
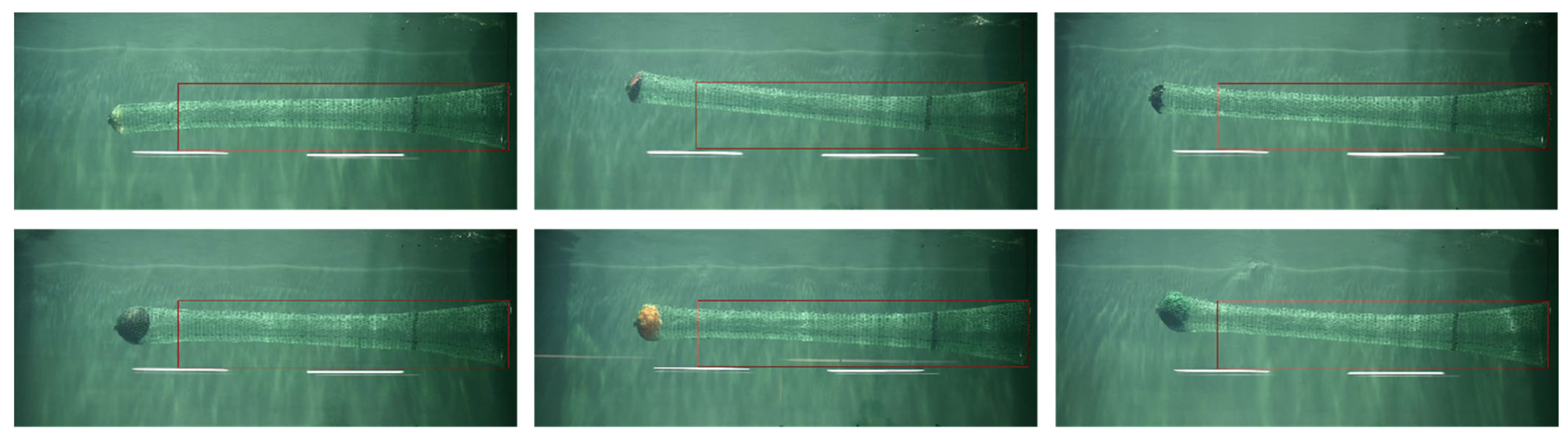
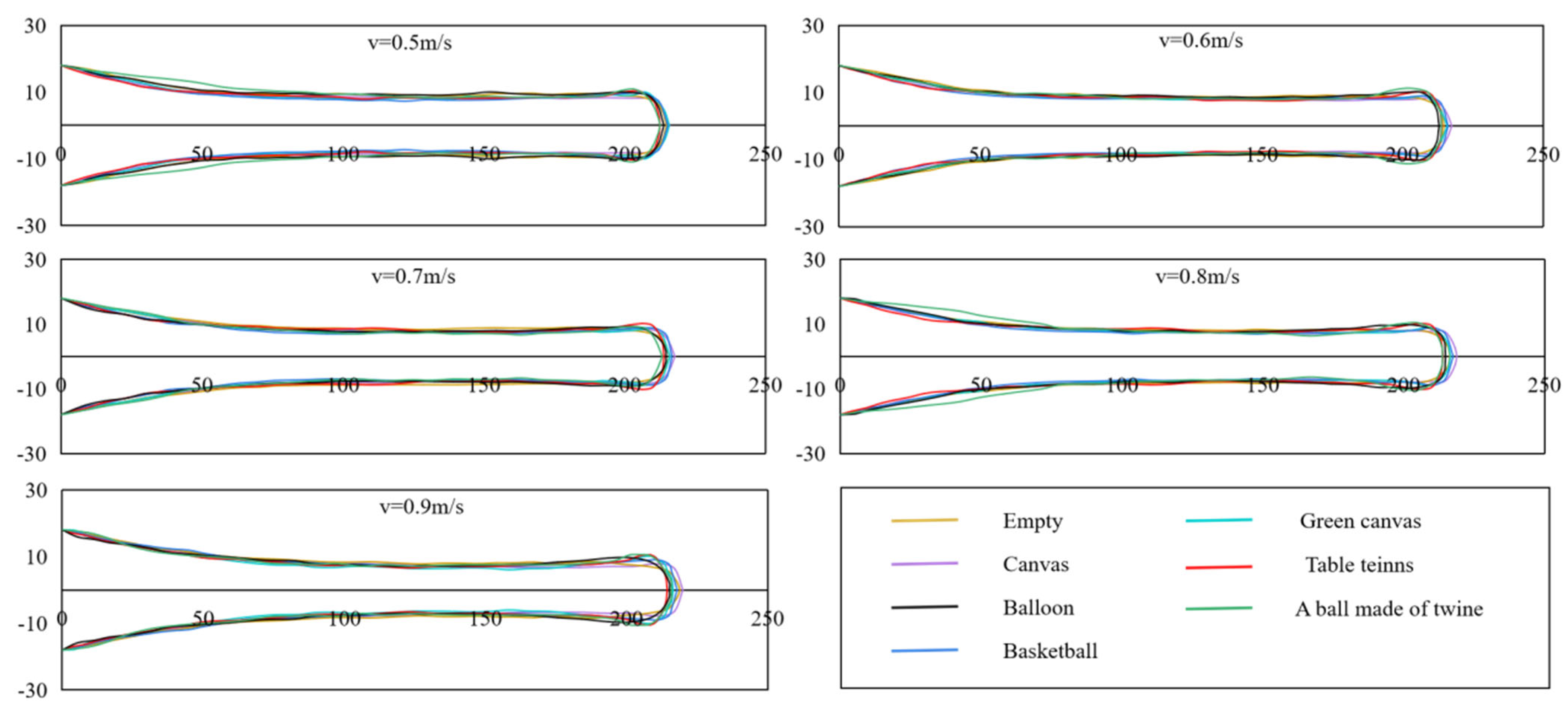
3.1. Morphological Changes of Codend
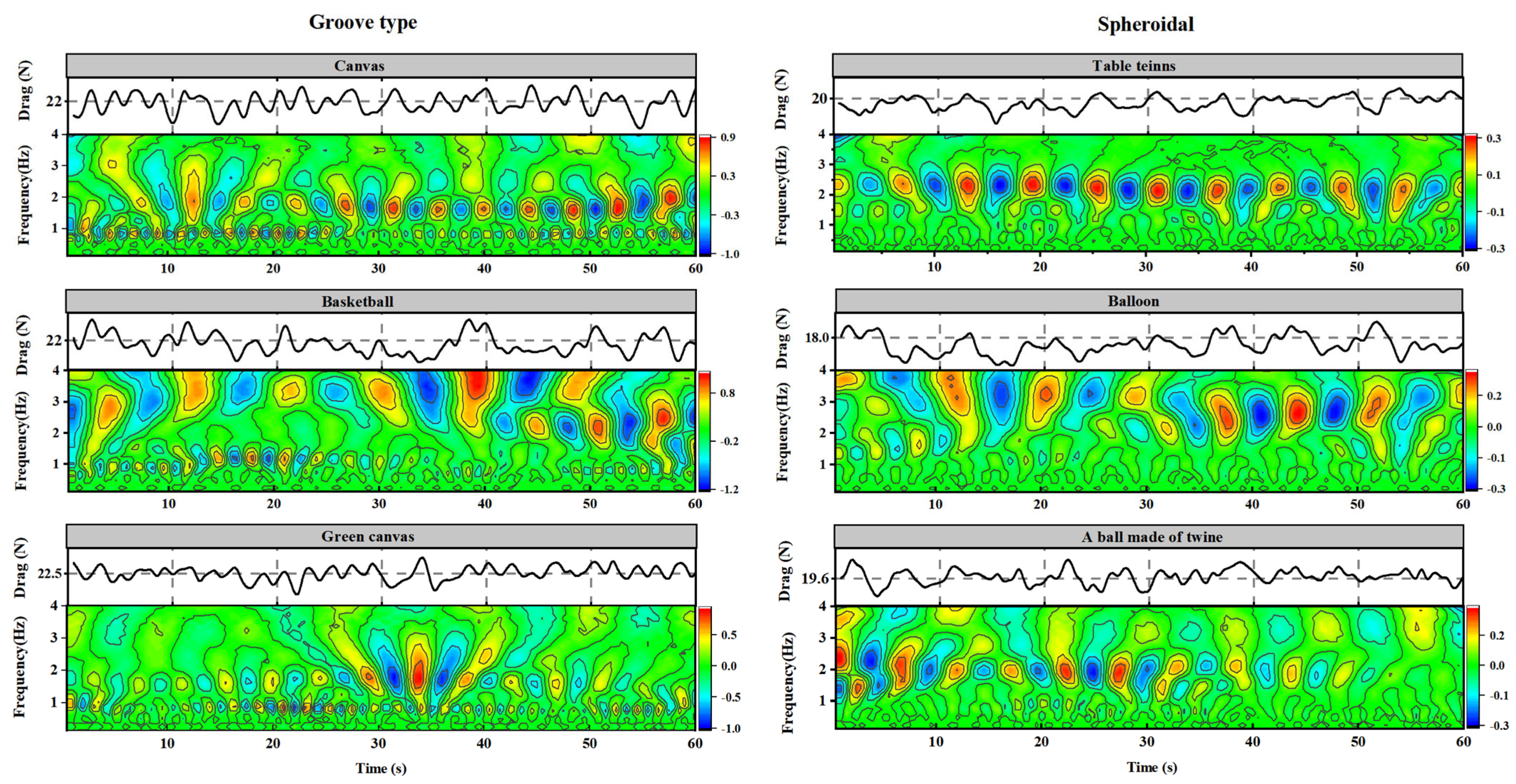
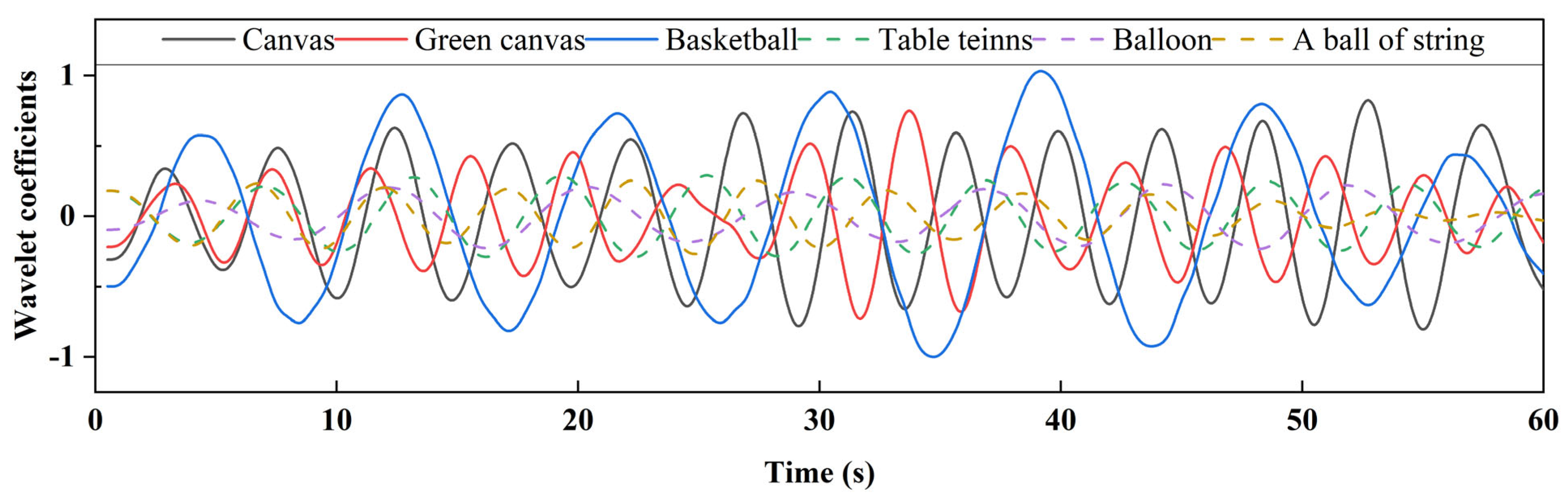
3.2. Morlet Wavelet Transform of Codend Resistance of Different Types of Simulated Catch
3.3. The Oscillation Characteristic of the Codend Drag Force Based on Main Period Morlet Wavelet Transform
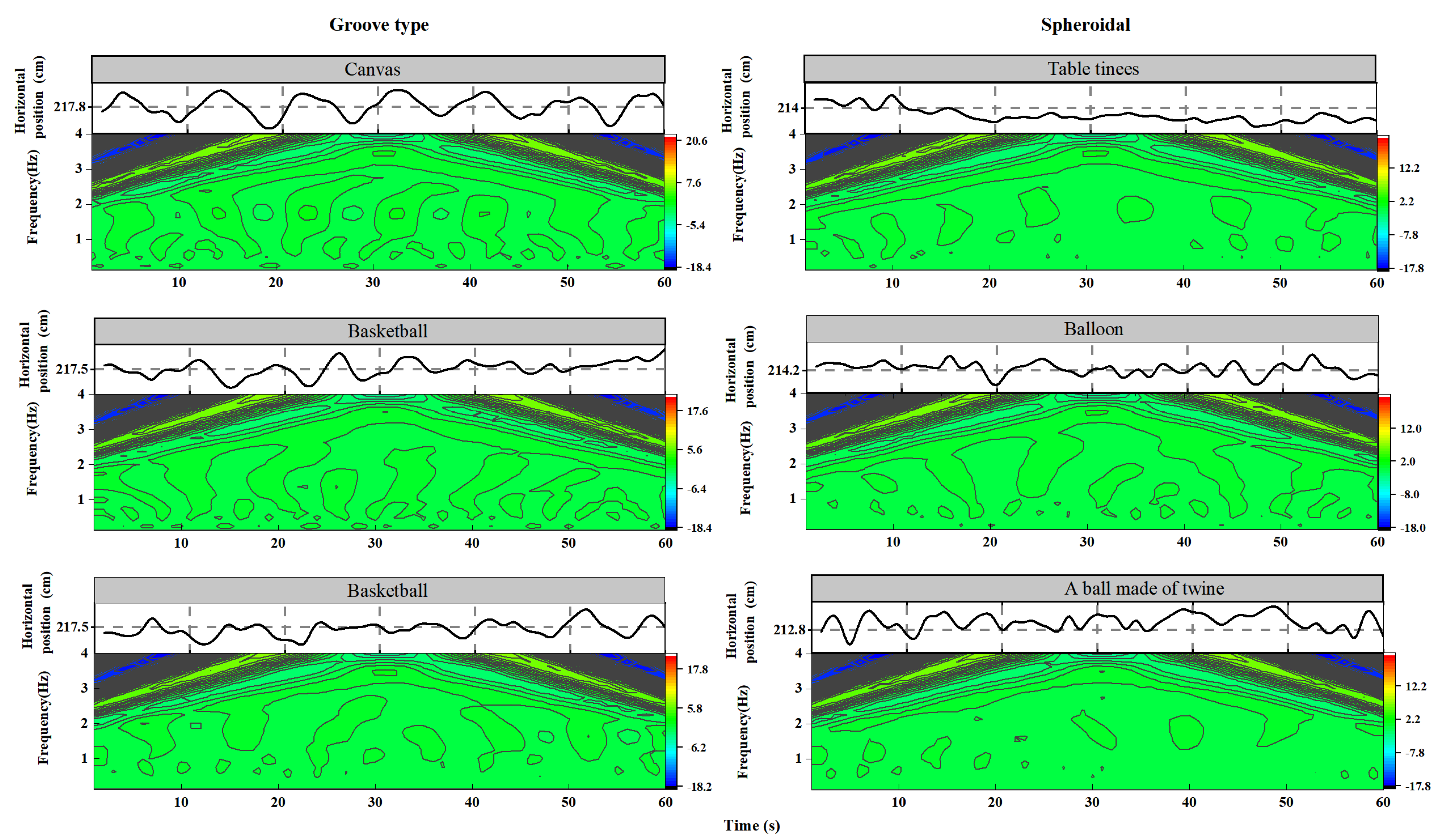
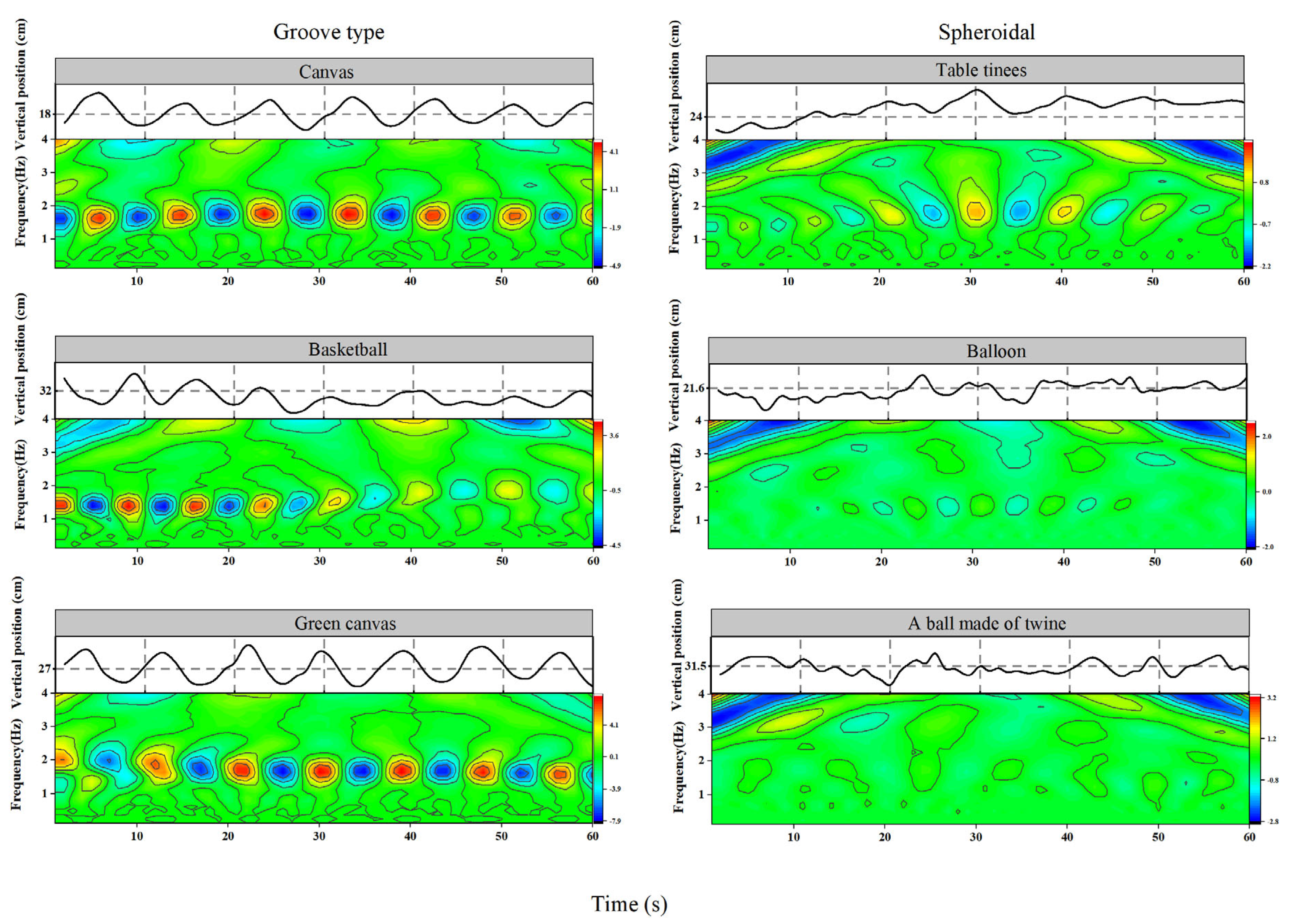
3.4. Morlet Wavelet Transform Characteristics of Spatial Displacement of Codend with Different Types of Simulated Catch
3.5. The Oscillation Characteristic of the Codend Spatial Displacement Based on Main Period Morlet Wavelet Transform
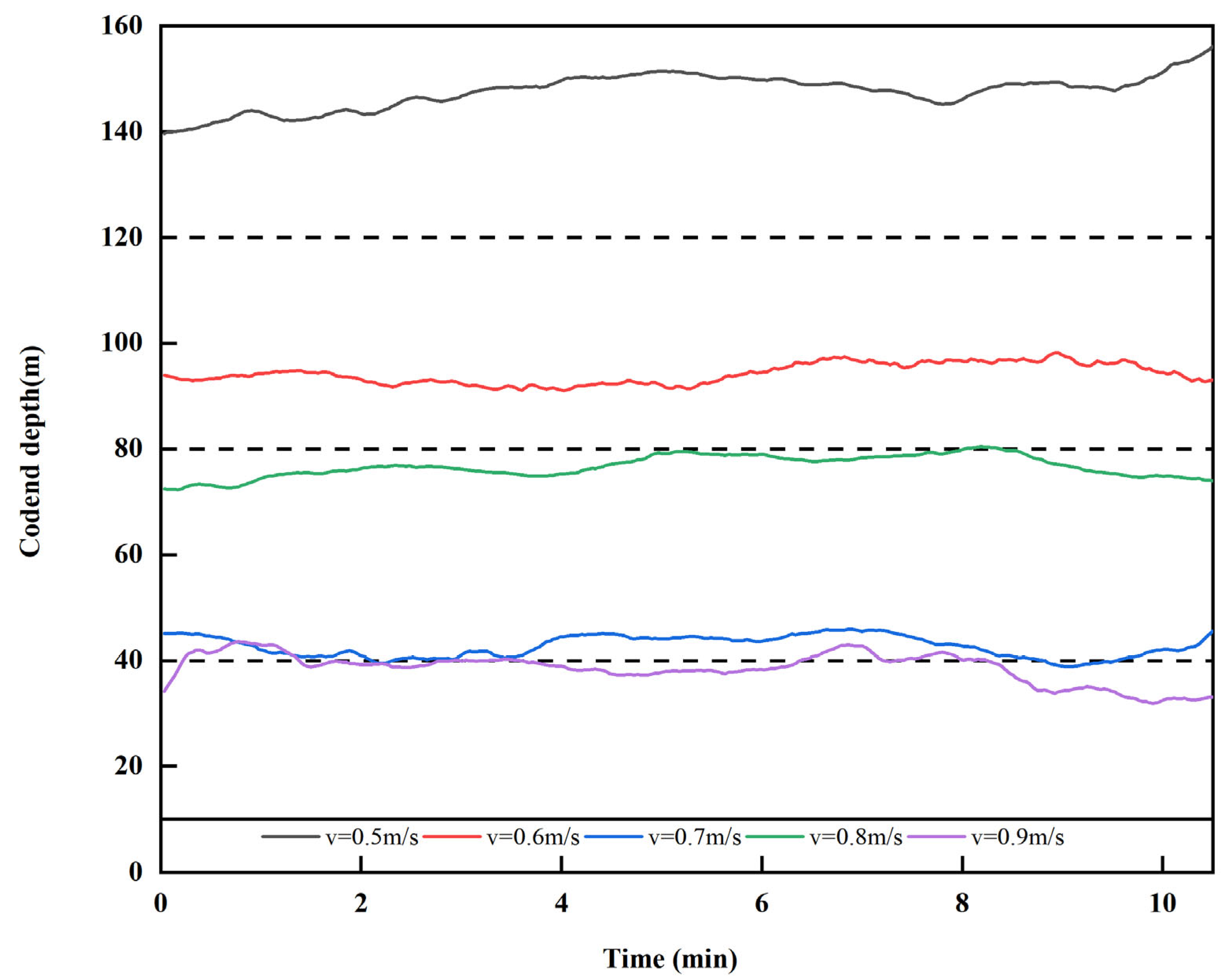
3.6. Longitudinal Displacement of Codend in Sea Trials
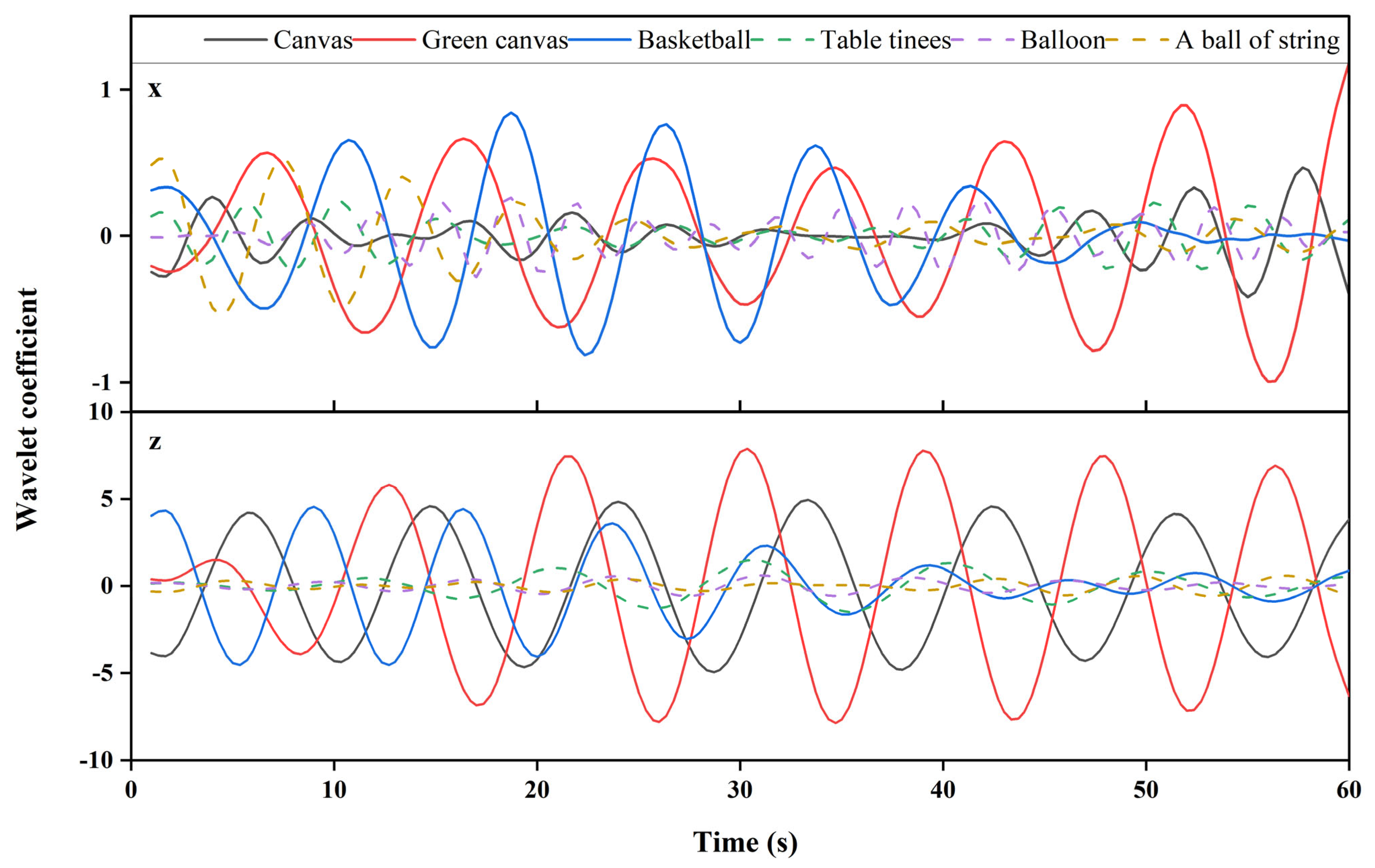
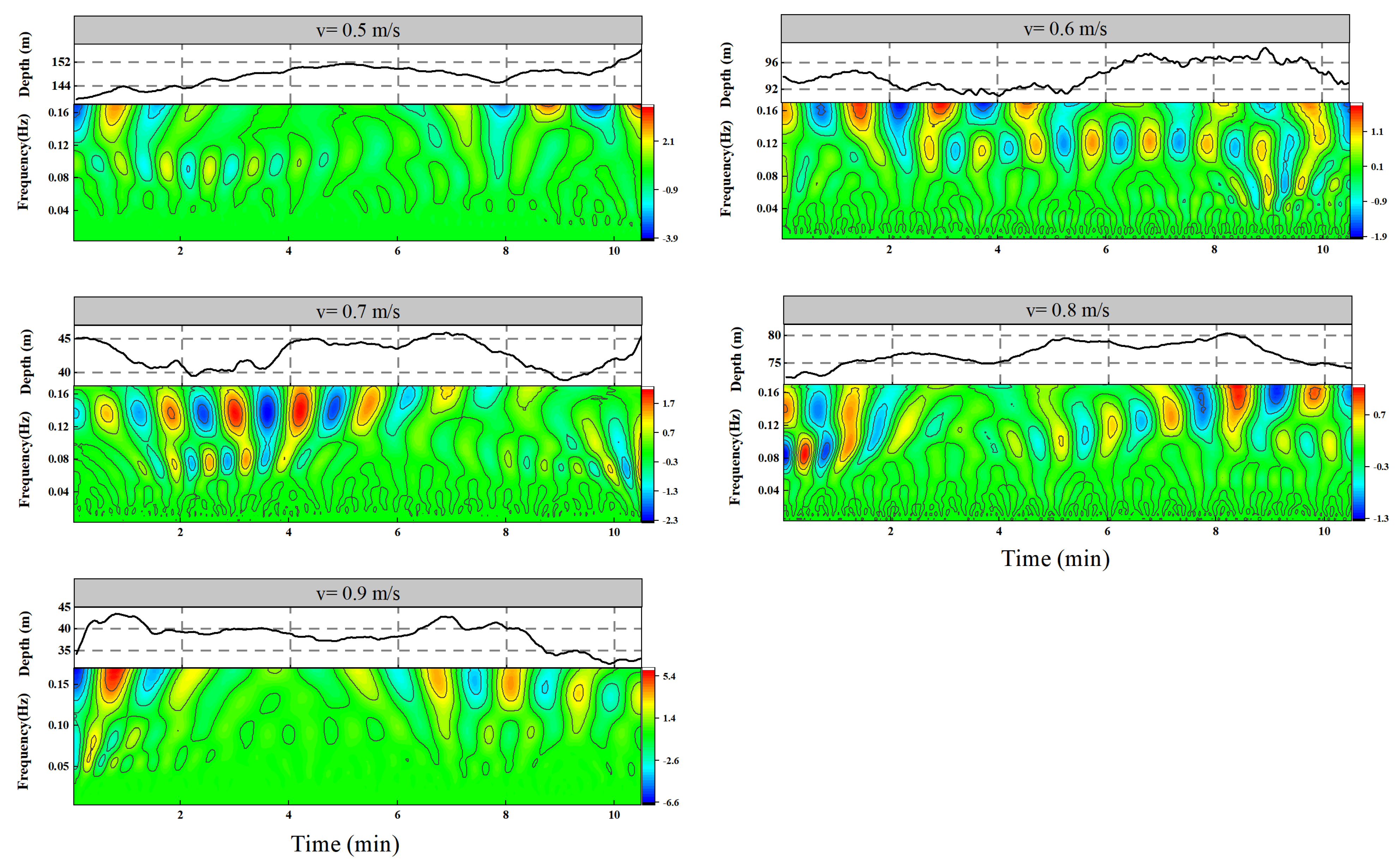
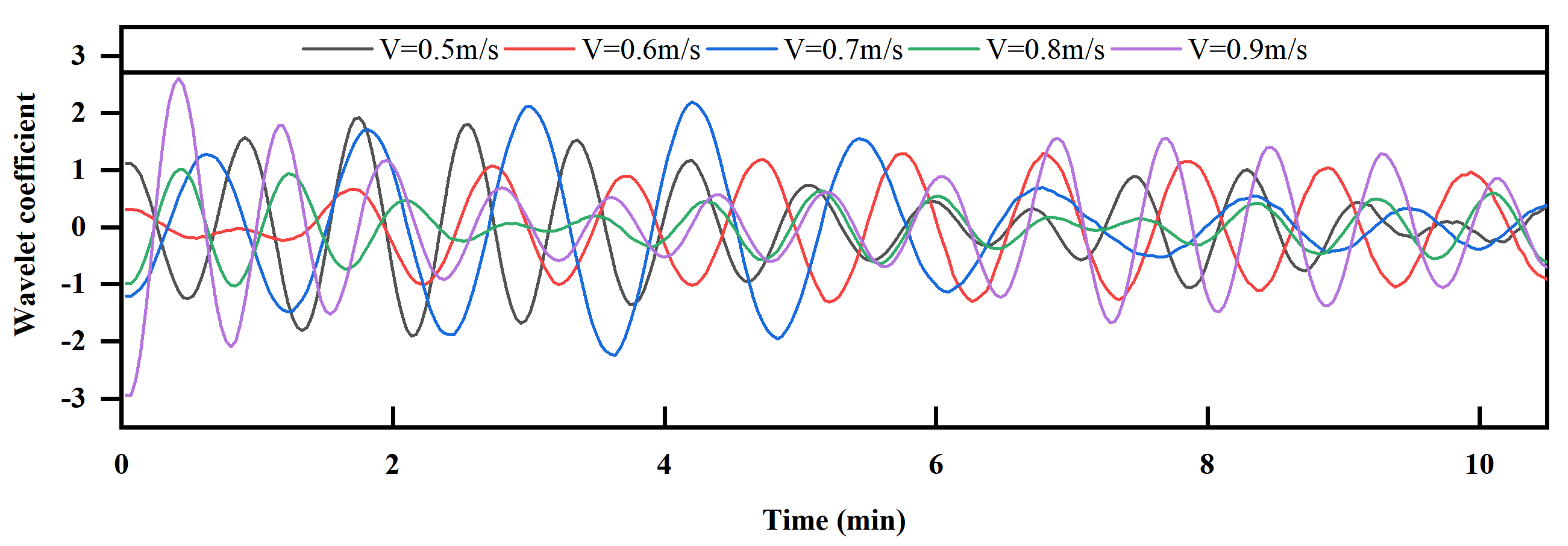
3.7. The Oscillation Characteristic of the Codend Longitudinal (z-Direction) Displacement Based on Morlet Wavelet Transform in Sea Trials
3.8. Contrast and Analysis of Measured and Test Results at Sea
4. Discussions
4.1. Effects of Simulated Catches on the Morphology of Codend
4.2. Effect of Simulated Catch Configuration on the Drag Force and Codend Motions
4.3. Simulated Catch Selection
5. Conclusions
- (1)
- The horizontal length of the codends with different simulated catch configurations increased with increasing flow velocity, but the range of the increase was not obvious, and the simulated catch configuration had little effect on the overall longitudinal displacement (codend motion in x-direction) of the codends (p > 0.05).
- (2)
- The drag and displacement oscillations of the codend with grooved catch configuration were obvious, and the oscillations were more severe than those of the codend with spherical catch configuration. Additionally, the longitudinal displacement amplitude of the codend with grooved catch configurations was approximately 8.79 times greater than that of the codend with spherical catch configuration.
- (3)
- The findings of the wavelet transform analysis on the codend drag and codend motions showed that the wavelet coefficients of the codends with grooved catch configurations were greater than those of codends with spherical catch configurations. Additionally, intense oscillations were observed in the low frequencies for all simulated catch configurations.
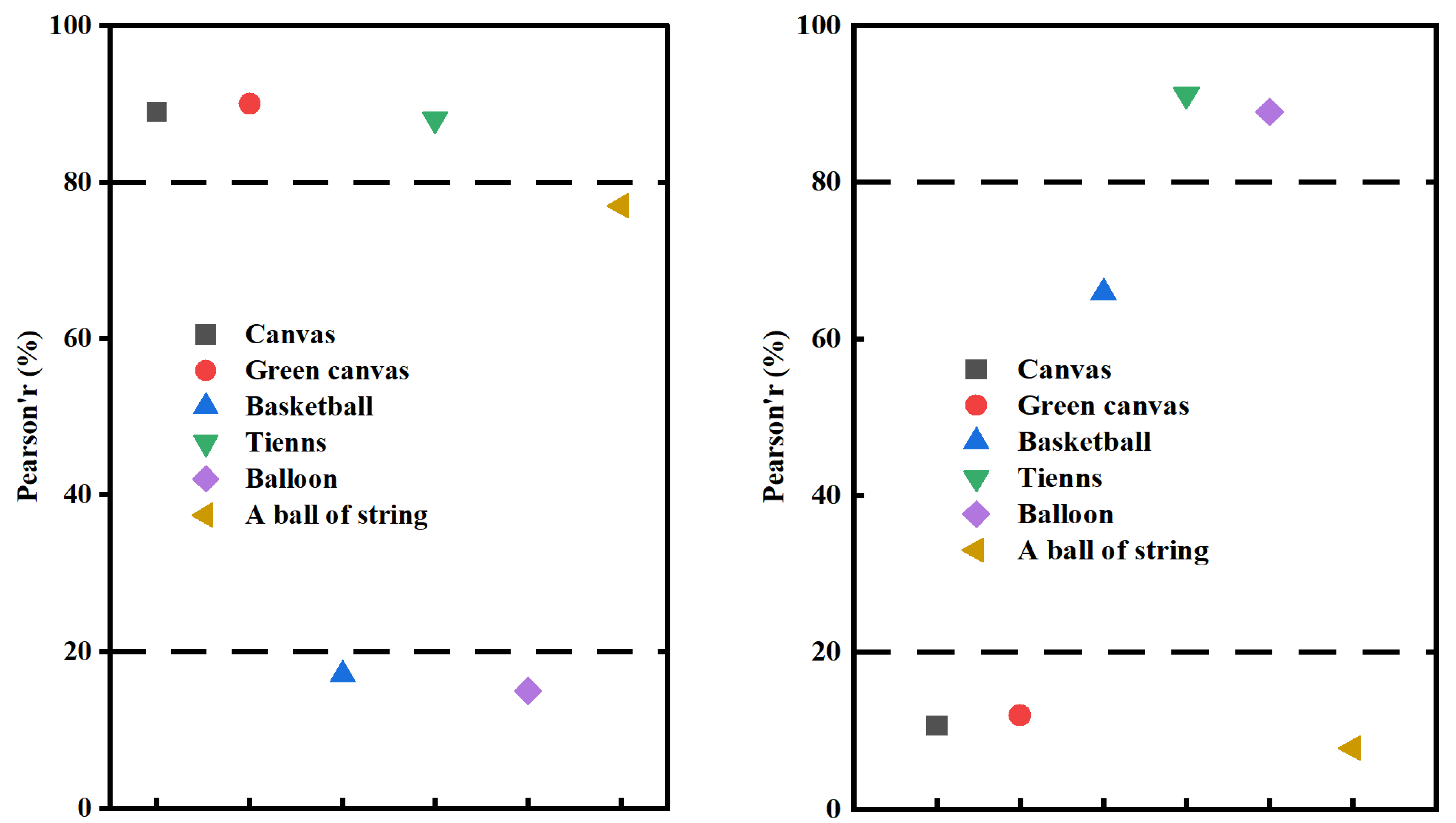
- (4)
- The correlation coefficient of the codend period with the water-filled table tennis ball was 89%, with an amplitude of 91%, which was closer to the actual measurement. The simulated catch used in the flume test is an approximation within a certain range rather than a catch set that fully matches the actual law of change. Therefore, this study suggests using the tennis ball as the simulated catch because it provided the oscillations that were consistent with those obtained during the sea trial.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stewart, P.A.M.; Ferro, R.S.T. Four experiments investigating codend drag. Fish. Res. 1987, 5, 349–358. [Google Scholar] [CrossRef]
- Thierry, B.N.N.; Tang, H.; Zhang, J.; Liu, W.; Xu, L.X.; Hu, F.X. Experimental analysis of the influence of gear design and catch weight on the fluid–structure interaction of a flexible codend structure used in trawl fisheries. Appl. Sci. 2023, 13, 2505. [Google Scholar] [CrossRef]
- Broadhurst, M.K.; Larsen, R.B.; Kennelly, S.J.; McShane, P.E. Use and success of composite square-mesh codends in reducing bycatch and in improving size-selectivity of prawns in Gulf St. Vincent, South Australia. Fish. Bull. 1999, 97, 434–448. [Google Scholar]
- Broadhurst, M.K.; Millar, R.B.; Wooden, M.E.L.; Macbeth, W.G. Fish. Manag. Ecol. 2006, 13, 81–92. [Google Scholar] [CrossRef]
- Priour, D. Numerical optimisation of trawls design to improve their energy efficiency. Fish. Res. 2009, 98, 40–50. [Google Scholar] [CrossRef]
- Wileman, D.A.; Ferro, R.S.T.; Fonteyne, R.; Millar, R.B. Manual of methods of measuring the selectivity of towed fishing gears. ICES Coop. Res. Rep. No. 1996, 126, 215. Available online: https://core.ac.uk/reader/45439858 (accessed on 3 February 2022).
- Liu, W.; Tang, H.; Xu, L.X.; Dong, S.H.; Xu, L.X.; Hu, F.X. Effect of cutting ratio and catch on drag characteristics and fluttering motions of midwater trawl codend. J. Mar. Sci. Eng. 2021, 9, 256. [Google Scholar] [CrossRef]
- Thierry, B.N.N.; Tang, H.; Xu, L.X.; You, X.X.; Hu, F.X.; Achile, N.P. Hydrodynamic performance of bottom trawls with different materials, mesh sizes, and twine thicknesses. Fish. Res. 2020, 221, 105403. [Google Scholar] [CrossRef]
- O’Neill, F.G.; Knudsen, L.H.; Wileman, D.A.; McKay, S.J. Cod-end drag as a function of catch size and towing speed. Fish. Res. 2005, 72, 163–171. [Google Scholar] [CrossRef]
- Pichot, G.; Germain, G.; Priour, D. On the experimental study of the flow around a fishing net. Eur. J. Mech. 2009, 28, 103–116. [Google Scholar] [CrossRef]
- Priour, D. Modelling axisymmetric codends made of hexagonal mesh types. Ocean Eng. 2014, 92, 1–11. [Google Scholar] [CrossRef]
- Cheng, Z.H.; Paul, D.W.; David, K. Hydrodynamic performance of full−scale T0 and T90 codends with and without a codend cover. Ocean Eng. 2022, 10, 440. [Google Scholar] [CrossRef]
- Bouhoubeiny, E.; Germain, G.; Druault, P. Time-resolved PIV investigations of the flow field around rigid codend net structure. Fish. Res. 2011, 108, 344–355. [Google Scholar] [CrossRef]
- Kim, H.Y. Analysis of the turbulent flow and tilt in the codend of a bottom trawl during fishing operations. Ocean Eng. 2013, 64, 100–108. [Google Scholar] [CrossRef]
- Blevins, R.D.; Saunders, H. Flow-induced vibration. J. Mech. Des. 1977, 101, 6. [Google Scholar] [CrossRef]
- O’Neill, F.G.; O’Donoghue, T. The fluid dynamic loading on catch and the geometry of trawl codends. Proc. R. Soc. Lond. A 1997, 453, 1631–1648. [Google Scholar] [CrossRef]
- Wan, R.; Jia, M.X.; Guan, Q.L.; Huang, L.Y.; Cheng, H.; Zhao, F.F.; He, P.G.; Hu, F.X. Hydrodynamic performance of a newly-designed Antarctic krill trawl using numerical simulation and physical modeling methods. Ocean Eng. 2019, 179, 173–179. [Google Scholar] [CrossRef]
- Priour, D.; Prada, A. An experimental numerical study of the catch weight influence on trawl behavior. Ocean Eng. 2015, 94, 94–102. [Google Scholar] [CrossRef]
- Jones, E.G.; Summerbell, K.; O’Neill, F. The influence of towing speed and fish density on the behaviour of haddock in a trawl codend. Fish. Res. 2008, 94, 166–174. [Google Scholar] [CrossRef]
- Druault, P.; Germain, G. Analysis of hydrodynamics of a moving trawl codend and its fluttering motions in flume tank. Eur. J. Mech. B Fluid 2016, 60, 219–229. [Google Scholar] [CrossRef]
- Thierry, N.N.B.; Tang, H.; Xu, L.X.; Hu, F.X.; You, X.X.; David, M.A.; Achille, N.P. Identifying the turbulent flow developing inside and around the bottom trawl by electromagnetic current velocity meter approach in the flume tank. J. Hydrodyn. 2021, 33, 636–656. [Google Scholar] [CrossRef]
- Thierry, B.N.N.; Tang, H.; Achile, N.P.; Xu, L.X.; Zhou, C.; Hu, F.X. Unsteady turbulent flow developing inside and around different parts of fluttering trawl net in flume tank. J. Fluid Struct. 2022, 108, 103451. [Google Scholar] [CrossRef]
- O’Neill, F.G.; McKay, S.J.; Ward, J.N.; Strickland, A.; Kynoch, R.J.; Zuur, A.F. An investigation of the relationship between sea state induced vessel motion and codend selection. Fish. Res. 2003, 60, 107–130. [Google Scholar] [CrossRef]
- Madsen, N.; Hansen, K.; Madsen, N.A.H. Behavior of different trawl codend concepts. Ocean Eng. 2015, 108, 571–577. [Google Scholar] [CrossRef]
- Tauti, M. A relation between experiments on model and on full-scale of fishing net. Nippon Suisan Gakkai Shi 1934, 3, 171–177. [Google Scholar] [CrossRef]
- Hu, F.X.; Matuda, K.; Tokai, T. Effects of drag coefficient of netting for dynamic similarity on model testing of trawl nets. Fish. Sci. 2001, 67, 84−89. [Google Scholar] [CrossRef]
- Tang, H.; Hu, F.X.; Xu, L.X.; Dong, S.C.; Zhou, C.; Wang, X.F. Variations in hydrodynamic characteristics of netting panels with various twine materials, knot types and weave patterns at small attack angles. Sci. Rep. 2019, 9, 1923. [Google Scholar] [CrossRef] [PubMed]
- Meyler, L.; Petrone, G.; Cammarata, G. Simulation of net structures hydrodynamic fields. In Modelling and Simulation; Intech Open: London, UK, 2008; pp. 261–282. [Google Scholar] [CrossRef]
- Cui, Y.; Guan, C.Y.; Wan, R.; Huang, B.; Li, J. Numerical simulation of a flatfish cage system in waves and currents. Aquac. Eng. 2013, 56, 26–33. [Google Scholar] [CrossRef]
- Herrmann, B.; Priour, D.; Krag, L.A. Simulation-based study of the combined effect on codend size selection of turning meshes by 90° and reducing the number of meshes in the circumference for round fish. Fish. Res. 2007, 84, 222–232. [Google Scholar] [CrossRef]
- Balash, C.; David, S.; Jonathan, B.; Giles, T.; Neil, B. Drag characterisation of prawn-trawl bodies. Ocean Eng. 2016, 113, 18–23. [Google Scholar] [CrossRef]
- Bouhoubeiny, E.; Druault, P.; Germain, G. Phase-averaged mean properties of turbulent flow developing around a fluttering sheet of net. Ocean Eng. 2014, 82, 160–168. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Length (m) | Main Engine Power (kW) | Total Tonnage (t) | Max Speed (kn) | Moulded Depth (m) | Moudeld Breadth (m) |
|---|---|---|---|---|---|
| 120.7 | 5296 | 7765 | 13 | 12 | 19 |
| Twine Materials | Mesh Size (mm) | Knot Direction | Codend Length (mm) | Cutting Ratio | |
|---|---|---|---|---|---|
| Extension codend | PE PE | 40 40 | T0 T0 | 480 1500 | 4:1(/NBNBN/3) AN |
| The Type of The Simulated Catch | Grooved Type Simulated Catch | Spheroidal Simulated Catch | ||||
|---|---|---|---|---|---|---|
| Canvas | Green Canvas | Basketball | Table Tennis Ball | A Ball Made of Twine | Balloon | |
| Material (cotton content) | Cotton (85–95%) | Cotton (81–90%) | polyurethane | Carbon nitride | Polyethylene | Latex |
| Thickness (mm) | 0.4 | 0.9 | 1.5 | |||
| Weight in air (N) | 0.25 | 0.51 | 1.04 | 10.6 | 6.03 | 14.5 |
| Weight in water(N) | 0.16 | 0.30 | 0.57 | 2.7 | 0.92 | 2.1 |
| The Type of The Simulated Catch | Grooved Type Simulated Catch | Spheroidal Simulated Catch | ||||
|---|---|---|---|---|---|---|
| Canvas | Basketball | Green Canvas | Table Tennis Ball | Balloon | A Ball Made of Twine | |
| Frequency (Hz) | 0.48 | 0.29 | 0.51 | 0.37 | 0.29 | 0.42 |
| Amplitude | 0.81 | 1.3 | 0.85 | 0.51 | 0.37 | 0.34 |
| The Type of The Simulated Catch | Grooved Type Simulated Catch | Spheroidal Simulated Catch | |||||
|---|---|---|---|---|---|---|---|
| Canvas | Basketball | Green Canvas | Table Tennis Ball | Balloon | A Ball Made of Twine | ||
| X | Frequency (Hz) | 0.74 | 0.61 | 0.53 | 0.9 | 1.25 | 0.67 |
| Amplitude | 0.35 | 1.08 | 1.29 | 0.26 | 0.32 | 0.37 | |
| Z | Frequency (Hz) | 0.52 | 0.54 | 0.61 | 0.5 | 0.63 | 0.61 |
| Amplitude | 8.91 | 4.54 | 13.72 | 1.94 | 0.78 | 0.69 | |
| Flow Velocity (m/s) | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | |
|---|---|---|---|---|---|---|
| Measured | Frequency (Hz) | 0.03 | 0.04 | 0.04 | 0.05 | 0.05 |
| Amplitude | 1.72 | 1.85 | 2.33 | 0.81 | 2.02 | |
| Flow Velocity (m/s) | Measured | Canvas | Green Canvas | Basketball | Tennis Ball | Balloon | A Ball Made of Twine | |
|---|---|---|---|---|---|---|---|---|
| Frequency (Hz) | 0.5 | 0.03 | 0.43 | 0.42 | 0.45 | 0.43 | 0.48 | 0.56 |
| 0.6 | 0.04 | 0.45 | 0.43 | 0.47 | 0.48 | 0.56 | 0.60 | |
| 0.7 | 0.04 | 0.52 | 0.54 | 0.61 | 0.50 | 0.63 | 0.61 | |
| 0.8 | 0.05 | 0.57 | 0.63 | 0.41 | 0.60 | 0.33 | 0.63 | |
| 0.9 | 0.05 | 0.63 | 0.63 | 0.32 | 0.58 | 0.49 | 0.72 | |
| Amplitude | 0.5 | 1.72 | 13.03 | 15.41 | 5.04 | 1.32 | 0.9 | 0.53 |
| 0.6 | 1.85 | 10.59 | 7.58 | 6.84 | 1.4 | 0.71 | 1.13 | |
| 0.7 | 2.33 | 8.91 | 13.72 | 4.54 | 1.94 | 0.78 | 0.69 | |
| 0.8 | 0.81 | 8.67 | 11.44 | 1.78 | 0.79 | 2.69 | 0.77 | |
| 0.9 | 2.02 | 9.44 | 11.36 | 4.26 | 2.06 | 1.21 | 0.93 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Tang, H.; Thierry, N.N.B.; Liu, W.; Sun, Q.; Zhu, M.; Zhang, C.; Guo, X.; Shan, C.; Xu, L.; et al. The Oscillating Behavior of Trawl Codends Including Various Geometric Configurations of Simulated Catch. J. Mar. Sci. Eng. 2023, 11, 1026. https://doi.org/10.3390/jmse11051026
Zhang F, Tang H, Thierry NNB, Liu W, Sun Q, Zhu M, Zhang C, Guo X, Shan C, Xu L, et al. The Oscillating Behavior of Trawl Codends Including Various Geometric Configurations of Simulated Catch. Journal of Marine Science and Engineering. 2023; 11(5):1026. https://doi.org/10.3390/jmse11051026
Chicago/Turabian StyleZhang, Feng, Hao Tang, Nyatchouba Nsangue Bruno Thierry, Wei Liu, Qiuyang Sun, Meixi Zhu, Can Zhang, Xuhao Guo, Chenxu Shan, Liuxiong Xu, and et al. 2023. "The Oscillating Behavior of Trawl Codends Including Various Geometric Configurations of Simulated Catch" Journal of Marine Science and Engineering 11, no. 5: 1026. https://doi.org/10.3390/jmse11051026