
Semi-Analytical Solution of Transverse Vibration of Cylinders with Non-Circular Cross-Section Partially Submerged in Water

Abstract
:1. Introduction
2. Semi-Analytical Method
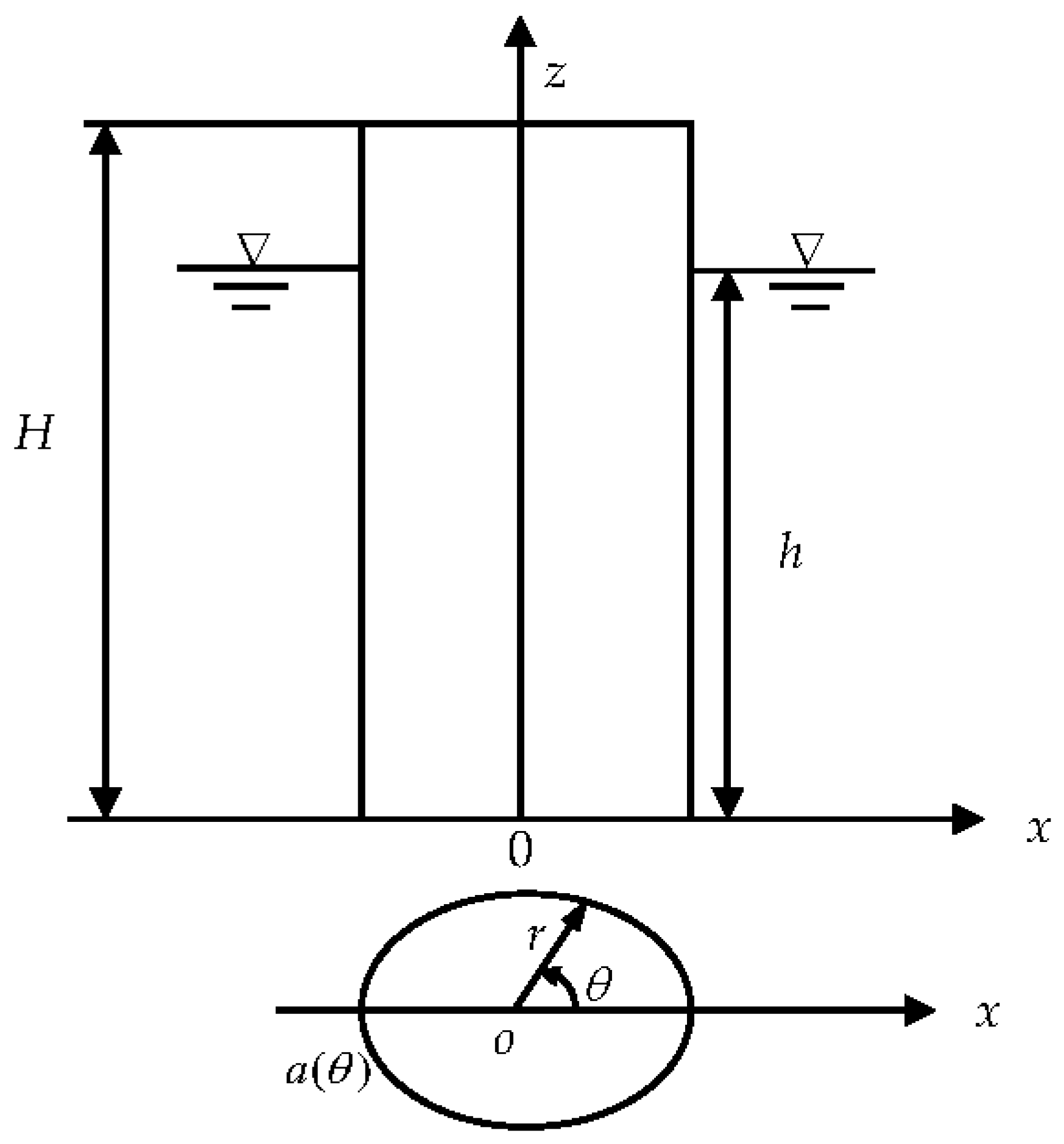
2.1. Governing Equations of Fluid–Structure Interaction
2.2. Solution of Velocity Potential
2.3. Eigenvalue Equation
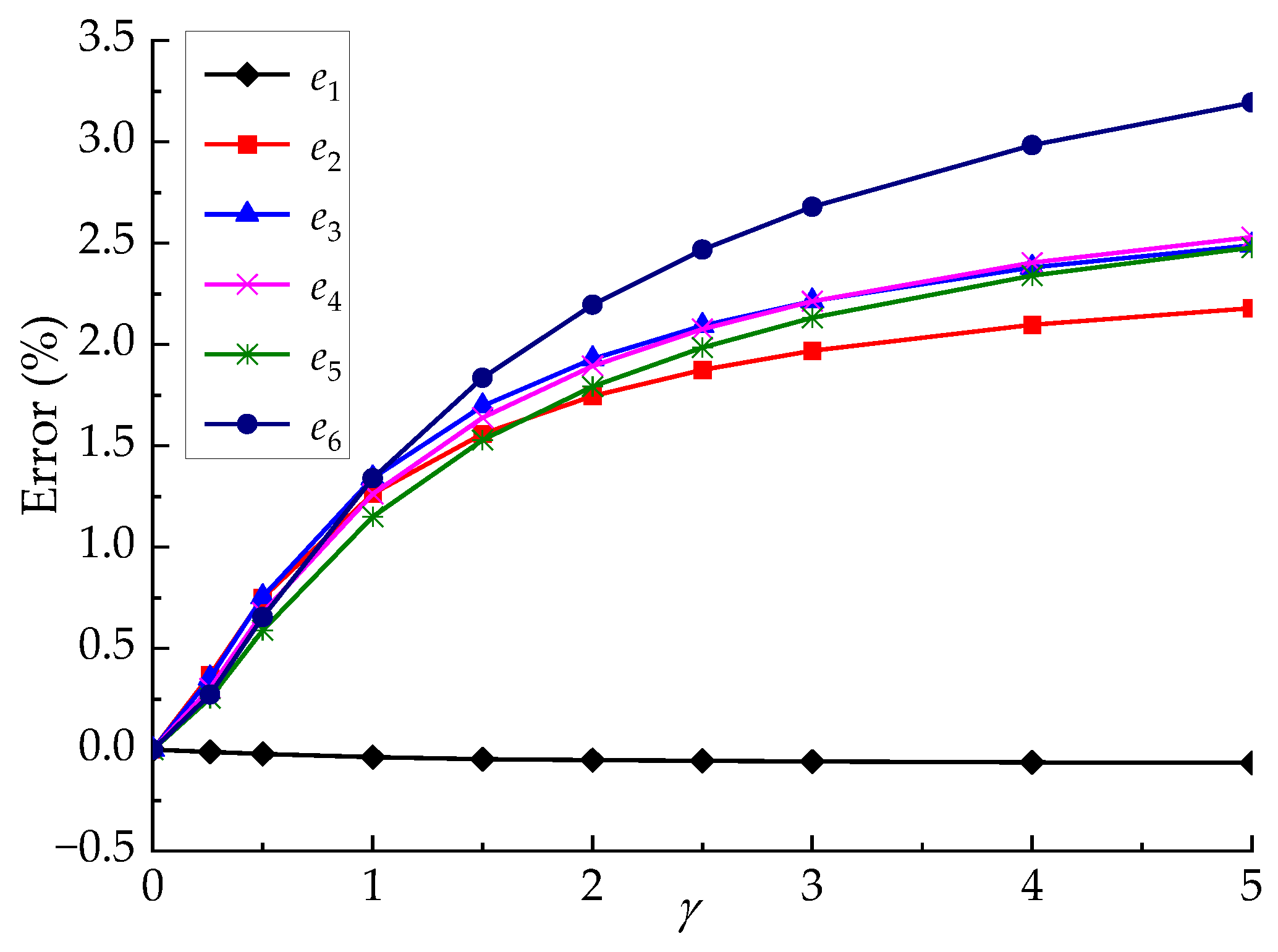
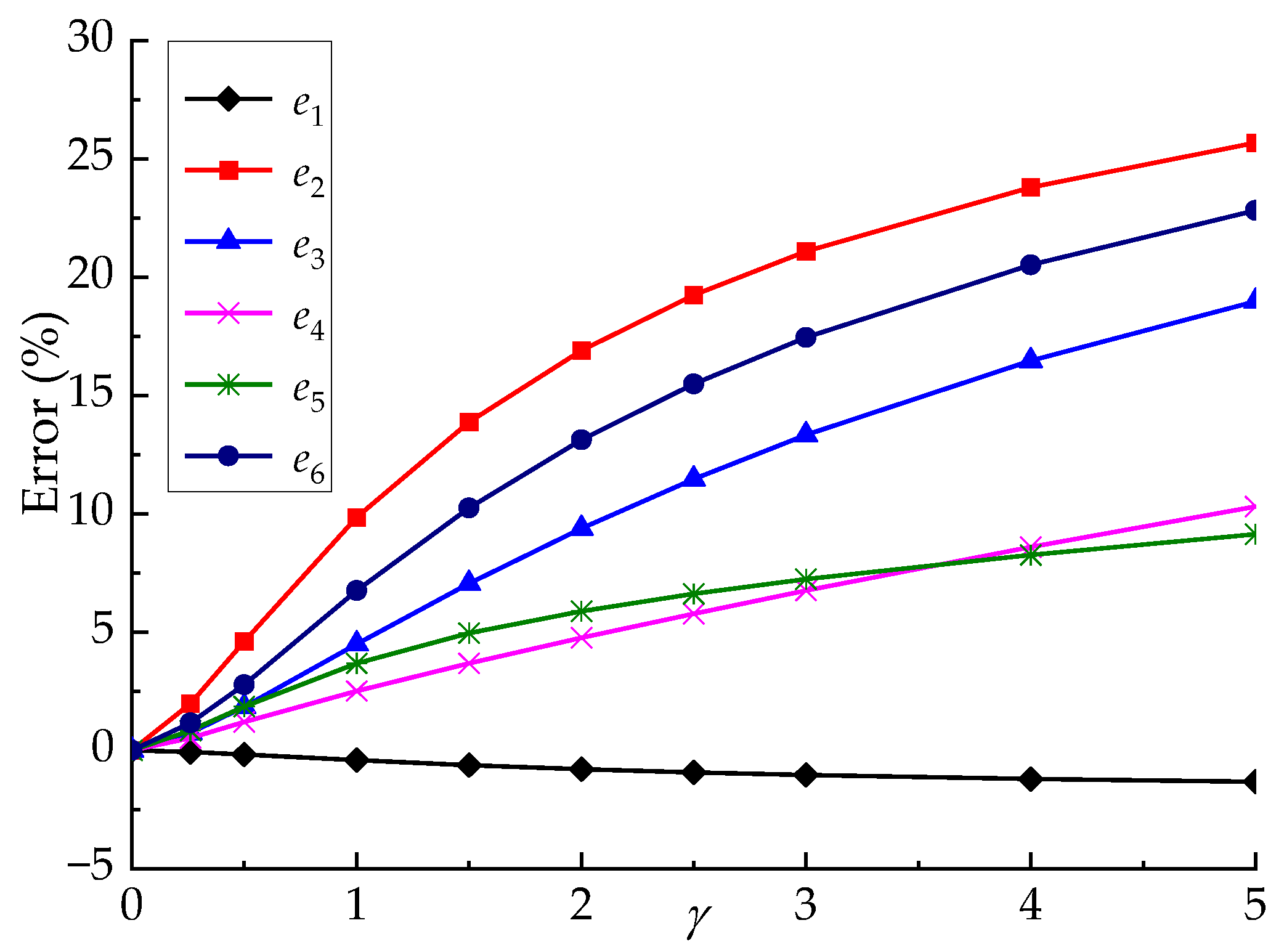
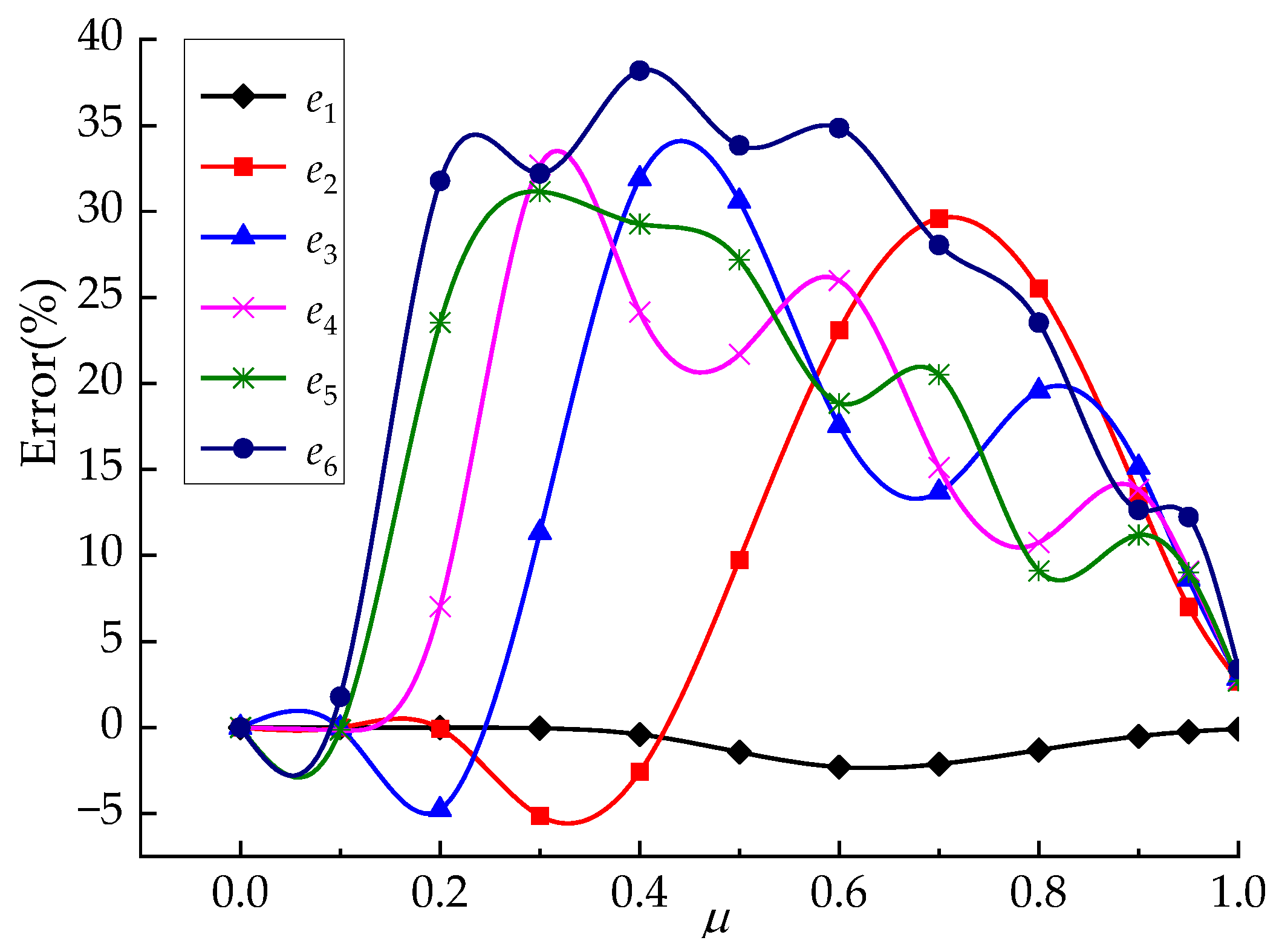
3. Convergence Studies
4. Results and Discussion
4.1. NAVMI Factor Solutions
4.2. Numerical Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yun, G.J.; Liu, C.G. Nonlinear dynamic analysis of the deep-water bridge piers under combined earthquakes and wave actions. Ocean Eng. 2022, 261, 112076. [Google Scholar] [CrossRef]
- Liu, H.B.; Chen, G.M.; Lyu, T.; Lin, H.; Zhu, B.R.; Huang, A. Wind-induced response of large offshore oil platform. Petrol. Explor. Dev. 2016, 43, 647–655. [Google Scholar] [CrossRef]
- Liu, J.B.; Guo, A.X.; Li, H. Analytical solution for the linear wave diffraction by a uniform vertical cylinder with an arbitrary smooth cross-section. Ocean Eng. 2016, 126, 163–175. [Google Scholar] [CrossRef]
- Xing, J.T.; Price, W.G.; Pomfret, M.J.; Yam, L.H. Natural vibration of a beam-water interaction system. J. Sound Vib. 1997, 199, 491–512. [Google Scholar] [CrossRef]
- Zhu, Y.Y.; Wen, Z.Y.; Wu, J.R. The coupled vibration between column and water considering the effects of surface wave and compressibility of water. Acta Mech. Sin. 1989, 6, 657–667. [Google Scholar]
- Cheung, Y.K.; Cao, Z.Y.; Wu, S.Y. Dynamic analysis of prismatic structures surrounded by an infinite fluid medium. Earthq. Eng. Struct. Dyn. 1985, 13, 351–360. [Google Scholar] [CrossRef]
- Amabili, M. Effect of finite fluid depth on the hydroelastic vibrations of circular and annular plates. J. Sound Vib. 1996, 193, 909–925. [Google Scholar] [CrossRef]
- Lin, H.Y.; Lee, J.N.; Sung, W.H. Vibration of an offshore structure having the form of a hollow column partially filled with multiple fluids and immersed in water. J. Appl. Math. 2012, 2012, 158983. [Google Scholar] [CrossRef]
- Zhou, D.; Liu, W.Q. Hydroelastic vibrations of flexible rectangular tanks partially filled with liquid. Int. J. Numer. Meth. Eng. 2007, 71, 149–174. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Bettess, P. Fluid-structure dynamic interaction and wave forces. An introduction to numerical treatment. Int. J. Numer. Meth. Eng. 1978, 13, 1–16. [Google Scholar] [CrossRef]
- Kuhl, E.; Hulshoff, S.; Borst, R.D. An arbitrary Lagrangian Eulerian finite-element approach for fluid-structure interaction phenomena. Int. J. Numer. Meth. Eng. 2003, 57, 117–142. [Google Scholar] [CrossRef]
- Jacobsen, L.S. Impulsive hydrodynamics of fluid inside a cylindrical tank and of fluid surrounding a cylindrical pier. Bull. Seismol. Soc. Am. 1949, 39, 189–204. [Google Scholar] [CrossRef]
- Yang, X.J.; Li, Y.C.; Liu, Z.; Ou, Y.P. Experimental and numerical identification of wet frequencies for rectangular-section cantilever beam in water. Open J. Acoust. Vib. 2018, 6, 54–61. [Google Scholar] [CrossRef]
- Wang, P.G.; Zhao, M.; Du, X.L. Simplified formula for earthquake-induced hydrodynamic pressure on round-ended and rectangular cylinders surrounded by water. J. Eng. Mech. 2019, 145, 04018137. [Google Scholar] [CrossRef]
- Wei, K.; Bouaanani, N.; Yuan, W.C. Simplified methods for efficient seismic design and analysis of water-surrounded composite axisymmetric structures. Ocean Eng. 2015, 104, 617–638. [Google Scholar] [CrossRef]
- Zhang, J.R.; Wei, K.; Qin, S.Q. An efficient numerical model for hydrodynamic added mass of immersed column with arbitrary cross-section. Ocean Eng. 2019, 187, 106192. [Google Scholar] [CrossRef]
- Liu, Y.Y. HAMS: A frequency-domain preprocessor for wave-structure interactions–theory, development, and application. J. Mar. Sci. Eng. 2019, 7, 81. [Google Scholar] [CrossRef]
- Han, R.P.S.; Xu, H.Z. A simple and accurate added mass model for hydrodynamic fluid-structure interaction analysis. J. Frankl. Inst.-Eng. Appl. Math. 1996, 333, 929–945. [Google Scholar] [CrossRef]
- Wang, P.G.; Zhao, M.; Du, X.L. A simple added mass model for simulating elliptical cylinder vibrating in water under earthquake action. Ocean Eng. 2019, 179, 351–360. [Google Scholar] [CrossRef]
- Yu, Y.; Ou, Y.P.; Liu, Z.; Li, Y.C. Simplified calculation method for dealing with added water mass for immersed cantilever cylinder. Mech. Eng. 2020, 42, 184–188. [Google Scholar] [CrossRef]
- Deruntz, J.A.; Geers, T.L. Added mass computation by the boundary integral method. Int. J. Numer. Meth. Eng. 2010, 12, 531–550. [Google Scholar] [CrossRef]
- Williams, A.N. Wave forces on an elliptic cylinder. J. Waterw. Port Coast. Ocean Eng. 1985, 111, 433–452. [Google Scholar] [CrossRef]
- Li, Q.; Yang, W.L. An improved method of hydrodynamic pressure calculation for circular hollow piers in deep water under earthquake. Ocean Eng. 2013, 72, 241–256. [Google Scholar] [CrossRef]
- Jiang, H.; Wang, B.X.; Bai, X.Y.; Zeng, C.; Zhang, H.D. Simplified expression of hydrodynamic pressure on deepwater cylindrical bridge piers during earthquakes. J. Bridge Eng. 2017, 22, 04017014. [Google Scholar] [CrossRef]
- McCormick, M.E. Hydrodynamic coefficients of a monolithic circular offshore structure. Earthq. Eng. Struct. Dyn. 1989, 18, 199–216. [Google Scholar] [CrossRef]
- Williams, A.N. Earthquake response of submerged circular cylinder. Ocean Eng. 1986, 13, 569–585. [Google Scholar] [CrossRef]
- Yang, W.L.; Li, Q. A new added mass method for fluid-structure interaction analysis of deep-water bridge. KSCE J. Civ. Eng. 2013, 17, 1413–1424. [Google Scholar] [CrossRef]
- Zhao, M.; Wang, L.X.; Huang, Y.M.; Wang, P.G.; Du, X.L.; Liu, J.B. A simplified added mass model for dynamic water pressure calculation of rectangle cylinder under earthquake. J. Disaster Prev. Mitig. Eng. 2020, 40, 174–180. [Google Scholar] [CrossRef]
- Bhatta, D.D. Wave diffraction by circular and elliptical cylinders in finite depth water. Int. J. Pure Appl. Math. 2005, 19, 67–87. [Google Scholar]
- Liang, K.M. Mathematical Methods for Physics, 5th ed.; Higher Education Press: Beijing, China, 2020; pp. 183–185. [Google Scholar]
- Li, H.C.; Ke, L.L.; Yang, J.; Kitipornchai, S. Size-dependent free vibration of microbeams submerged in fluid. Int. J. Struct. Stab. Dyn. 2020, 20, 2050131. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| b0/a0 | μ | L | |||||
|---|---|---|---|---|---|---|---|
| 1.0 | 1.0 | 3 | 1.76214 | 4.40831 | 7.42111 | ||
| 4 | 1.76214 | 4.40830 | 7.42033 | 10.45594 | |||
| 5 | 1.76214 | 4.40830 | 7.42033 | 10.45483 | 13.51868 | ||
| 6 | 1.76214 | 4.40830 | 7.42029 | 10.45483 | 13.51737 | ||
| 0.8 | 3 | 1.82937 | 4.45475 | 7.47621 | |||
| 4 | 1.82937 | 4.45474 | 7.47374 | 10.55185 | |||
| 5 | 1.82937 | 4.45474 | 7.47367 | 10.54663 | 13.63776 | ||
| 6 | 1.82937 | 4.45473 | 7.47360 | 10.54646 | 13.63005 | ||
| 0.5 | 1.0 | 3 | 1.66802 | 4.17647 | 7.04960 | ||
| 4 | 1.66802 | 4.17644 | 7.04755 | 9.96702 | |||
| 5 | 1.66802 | 4.17642 | 7.04752 | 9.96387 | 12.93266 | ||
| 6 | 1.66802 | 4.17642 | 7.04740 | 9.96386 | 12.92871 | ||
| 0.8 | 3 | 1.78331 | 4.27320 | 7.15348 | |||
| 4 | 1.78331 | 4.27316 | 7.14618 | 10.14705 | |||
| 5 | 1.78331 | 4.27315 | 7.14590 | 10.12947 | 13.17693 | ||
| 6 | 1.78331 | 4.27315 | 7.14573 | 10.12872 | 13.15165 | ||
| Dry modes | 1.87510 | 4.69409 | 7.85476 | 10.99554 | 14.13717 | ||
| β | μ | ||||||
|---|---|---|---|---|---|---|---|
| b0/a0 = 0.5 | |||||||
| 0.05 | 0.8 | 1.76816 | 4.24859 | 7.04660 | 9.93900 | 12.89451 | 15.87104 |
| 1.0 | 1.64492 | 4.11938 | 6.92178 | 9.74505 | 12.60615 | 15.50506 | |
| 0.1 | 0.8 | 1.78330 | 4.27310 | 7.14564 | 10.12862 | 13.15153 | 16.18568 |
| 1.0 | 1.66800 | 4.17636 | 7.04731 | 9.96374 | 12.92856 | 15.93466 | |
| b0/a0 = 1.0 | |||||||
| 0.05 | 0.8 | 1.82007 | 4.43447 | 7.40232 | 10.42459 | 13.47035 | 16.51177 |
| 1.0 | 1.74523 | 4.36876 | 7.33377 | 10.30927 | 13.31098 | 16.33582 | |
| 1.0 | (1.77103) | (4.42978) | (7.40222) | — | — | — | |
| {1.74192} | — | — | — | — | — | ||
| 0.1 | 0.8 | 1.82937 | 4.45473 | 7.47360 | 10.54646 | 13.63005 | 16.71520 |
| 1.0 | 1.76214 | 4.40830 | 7.42029 | 10.45483 | 13.51736 | 16.60071 | |
| b0/a0 = 2.0 | |||||||
| 0.05 | 0.8 | 1.84876 | 4.55571 | 7.62672 | 10.71887 | 13.81788 | 16.91419 |
| 1.0 | 1.80859 | 4.52616 | 7.59265 | 10.66015 | 13.74357 | 16.83899 | |
| 1.0 | [1.82577] | [4.54193] | [7.61742] | — | — | — | |
| 0.1 | 0.8 | 1.85423 | 4.57186 | 7.67258 | 10.78961 | 13.90756 | 17.02715 |
| 1.0 | 1.82000 | 4.55155 | 7.64721 | 10.74665 | 13.85935 | 16.98048 | |
| 1.0 | [1.83926] | [4.56738] | [7.67191] | — | — | — | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, H.; Guo, Y.; Huo, R. Semi-Analytical Solution of Transverse Vibration of Cylinders with Non-Circular Cross-Section Partially Submerged in Water. J. Mar. Sci. Eng. 2023, 11, 872. https://doi.org/10.3390/jmse11040872
Han H, Guo Y, Huo R. Semi-Analytical Solution of Transverse Vibration of Cylinders with Non-Circular Cross-Section Partially Submerged in Water. Journal of Marine Science and Engineering. 2023; 11(4):872. https://doi.org/10.3390/jmse11040872
Chicago/Turabian StyleHan, Huixuan, Yishuo Guo, and Ruili Huo. 2023. "Semi-Analytical Solution of Transverse Vibration of Cylinders with Non-Circular Cross-Section Partially Submerged in Water" Journal of Marine Science and Engineering 11, no. 4: 872. https://doi.org/10.3390/jmse11040872