In this section, we conduct simulations in the scenario where the targets are in the dense area. By analyzing the positioning error and comparing the proposed algorithm with other classical distributed filter algorithms when the targets are close to each other and their trajectories intersect, we verify the tracking performance of the proposed multi-target tracking algorithm.
4.1. Simulation Setting
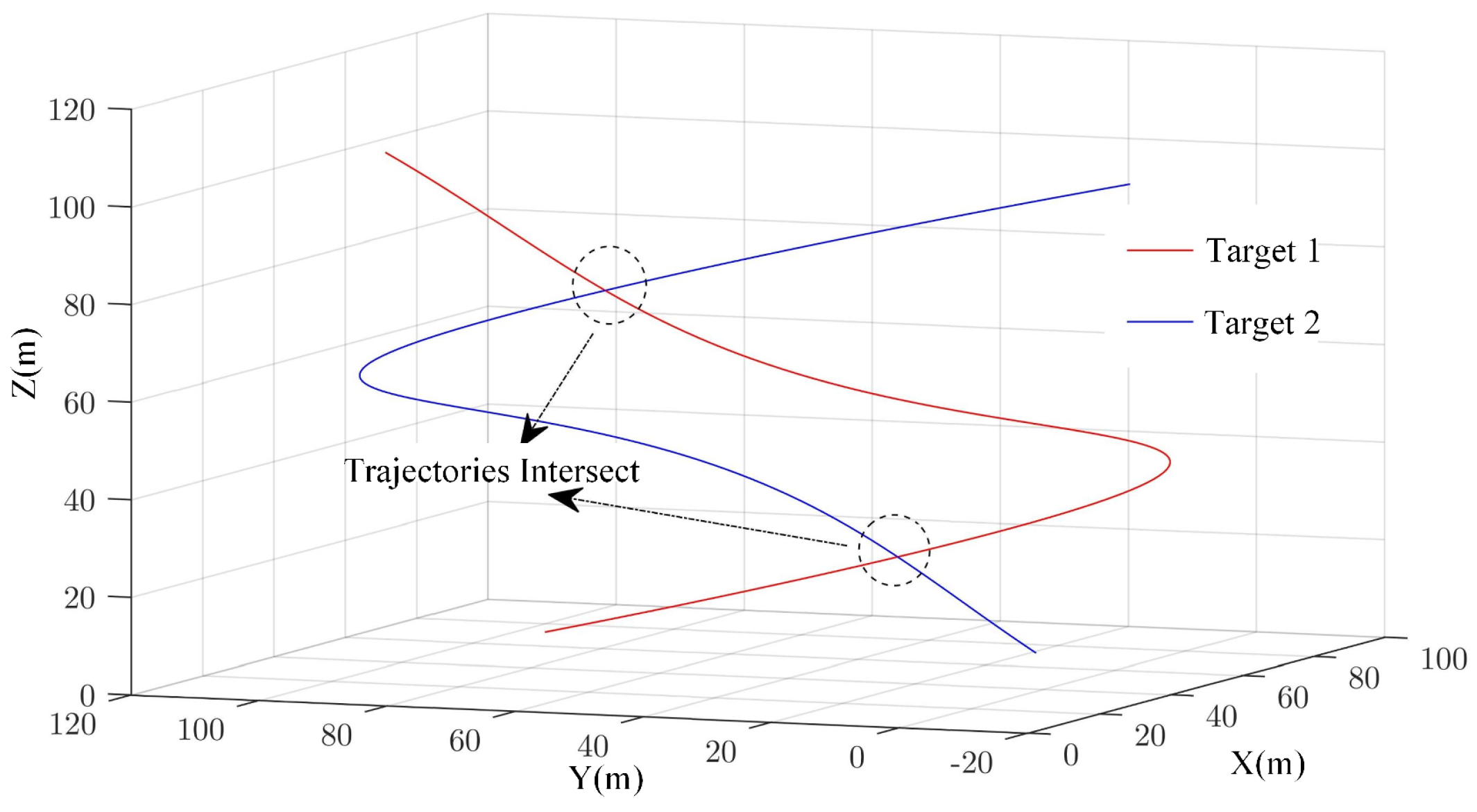
To evaluate the performance of the algorithm, we assume that two targets are relatively close and their trajectories intersect.
As shown in
Figure 4, two targets’ trajectories are overlapped when they are close to the intersecting point. We set their trajectories as follows:
Target 2:
where
k is a parameter of the trajectory. The sampling interval is 1 s. We stipulate that when the distance between two targets is less than 100 m, the targets enter a dense area. In addition, the distance threshold
between two targets is set to 3. One system node and four observation nodes are deployed in the three-dimensional space, which are designated as the monitoring system. The vertexes’ coordinates
of the dense area are
respectively.
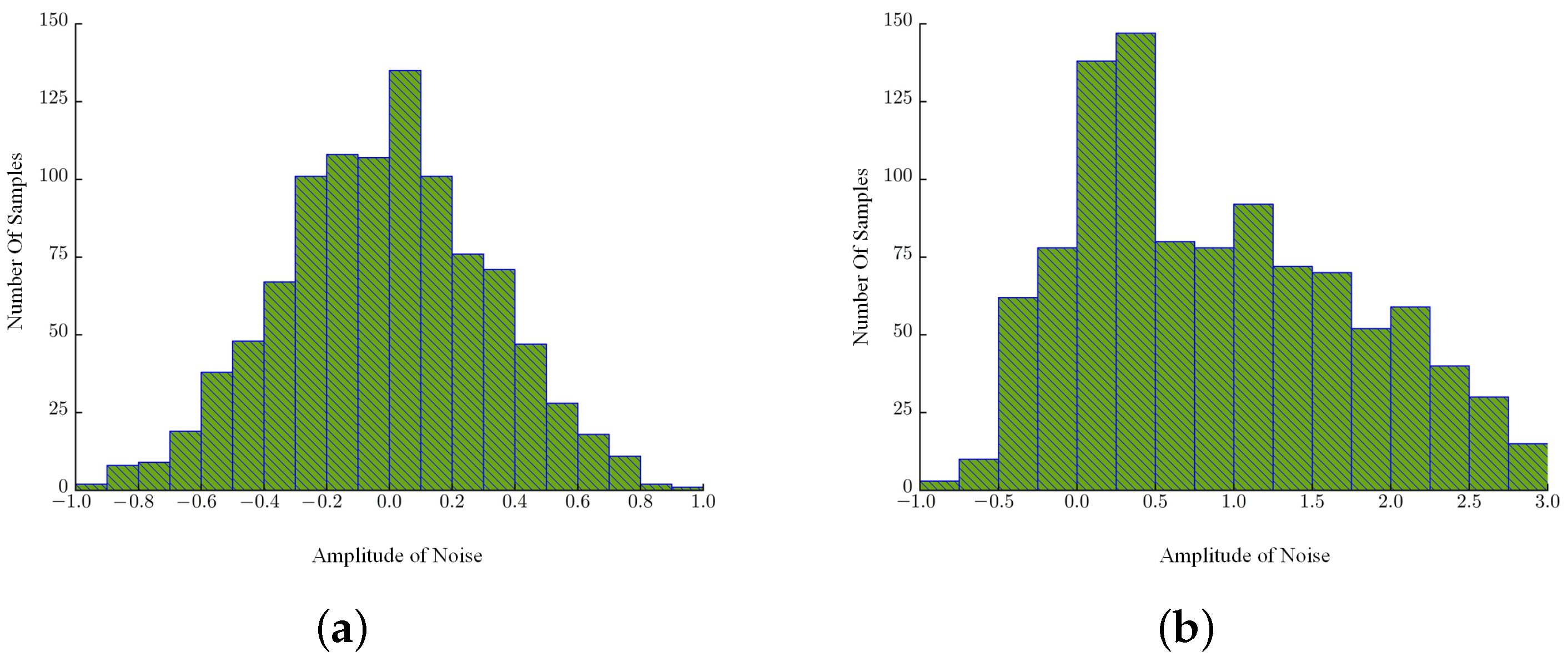
To verify the reliability and tracking accuracy of the proposed underwater target tracking algorithm for a non-Gaussian and nonlinear system, false alarms and noise interference are added to the observation of each node. Considering the complexity of underwater environment, the observation noise is modeled as a complex Gaussian mixture noise (GMN) model:
represent Gaussian noises with different variances, which can be viewed as the random variances of the Gaussian mixture noise.
Figure 5 shows the noise distribution in the simulation with 1000 samples.
Figure 5a,b illustrate the histograms of different noise amplitude’s counts under Gaussian noise and Gaussian mixture noise.
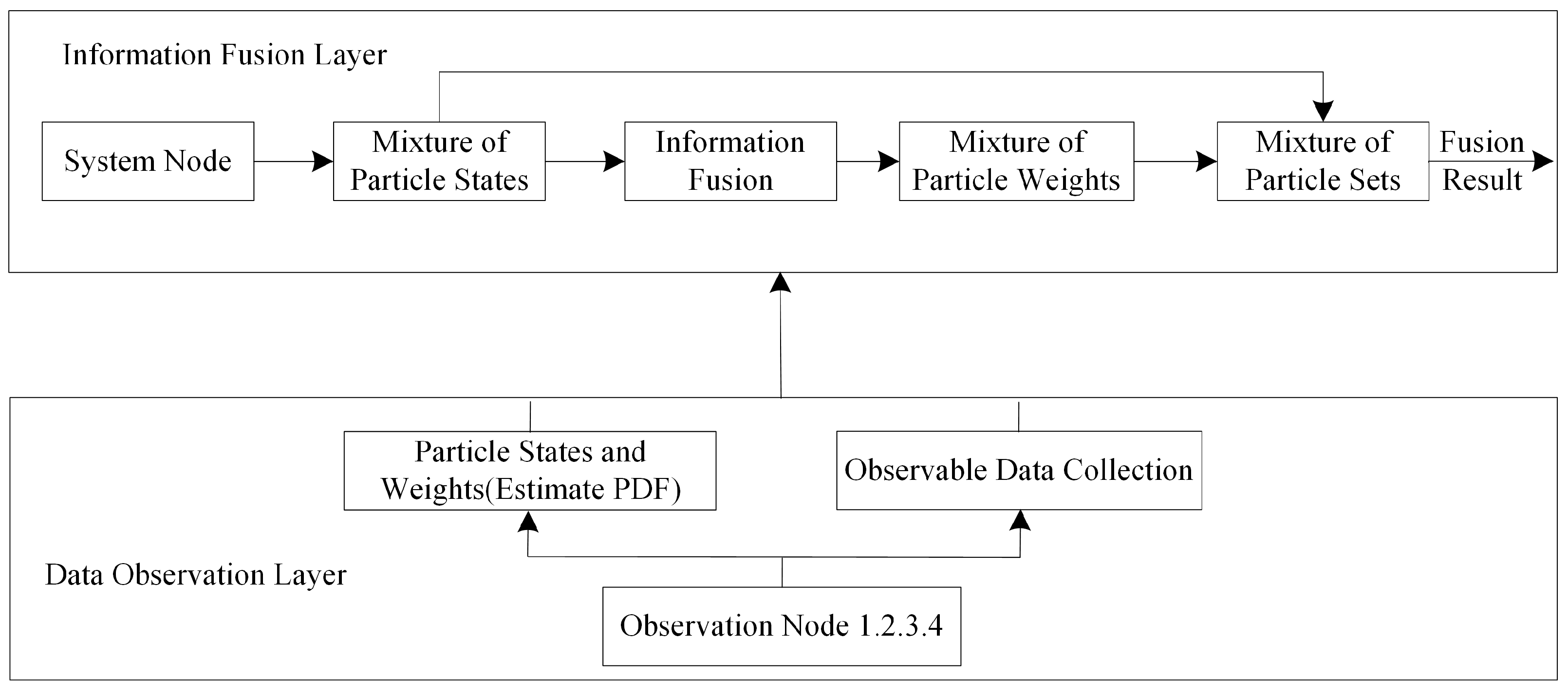
The accuracy of the posterior estimation for the target’s real state in the particle filter is positively correlated with the number of particles. However, the computation complexity of the algorithm also increases when the number of particles becomes larger. Considering this dilemma, we set the number of particles according to the task complexity of different layers. In the data observation layer, the demand for particle numbers is not high for the measurement and processing of distance information. However, the information fusion layer’s particle filter involves the global state estimation, so sufficient particles are required to ensure accurate estimation. Therefore, we set particle numbers of the data observation layer and the information fusion layer to 1000 and 10,000 respectively.
4.2. Comparison and Analysis
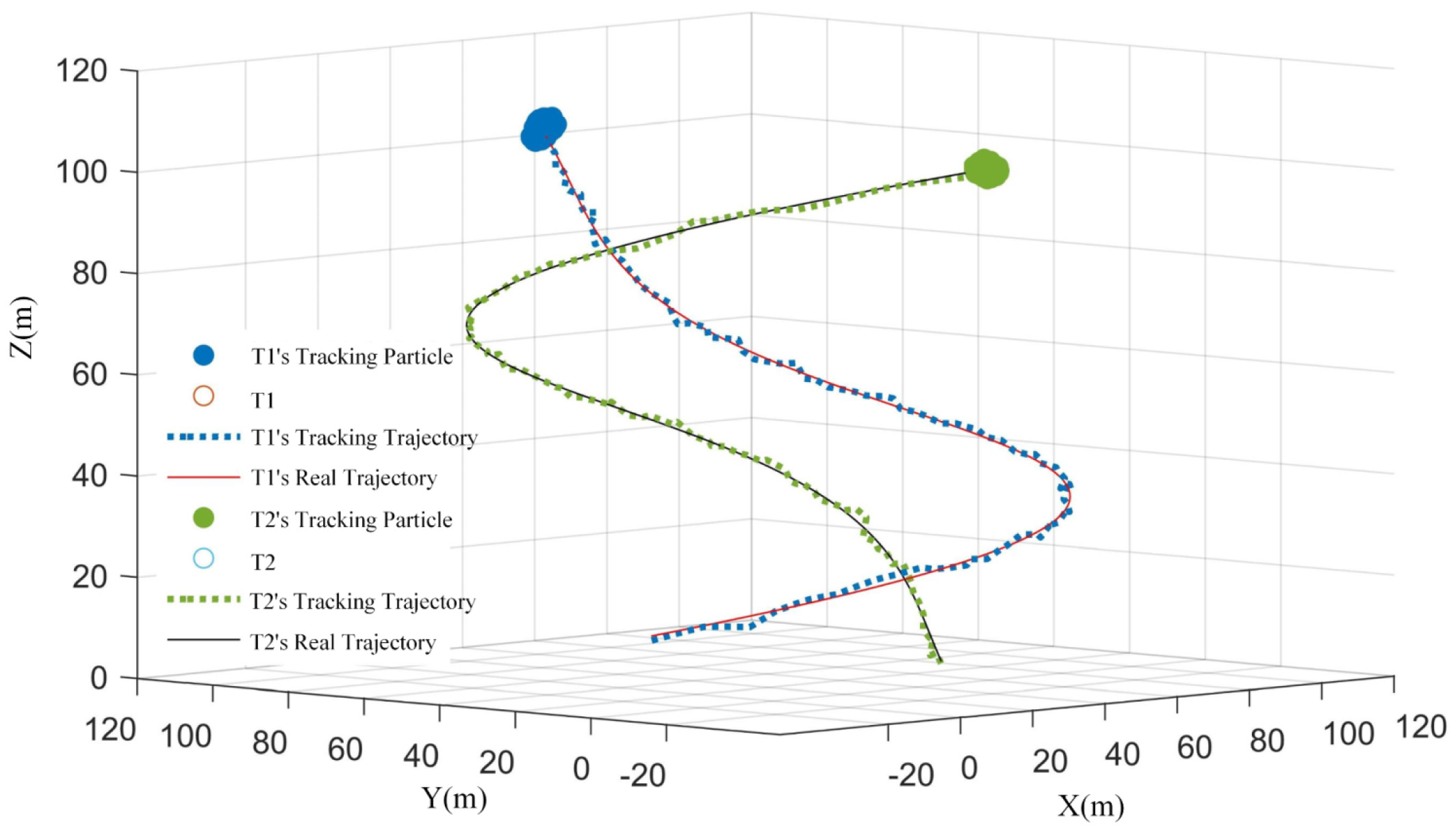
According to the above setting, under the interference of Gaussian mixture noises, the tracking results of the proposed algorithm in three-dimensional space are shown in
Figure 6. The tracking accuracy keeps relatively high with minor bias when targets are close to each other but not intersecting in the dense area. Even when the targets intersect in a short time interval, the states and trajectories of the targets can still be accurately obtained. The tracking accuracy is relatively high in the whole process of simulation without significant degradation in the given monitoring area, which proves the effectiveness of the proposed algorithm.
In order to verify the advantages of TLPF-DPF positioning algorithm, we compare it with the particle filter algorithm based on distributed fusion (PF-DF) [
30] and the extended Kalman filter algorithm based on distributed fusion (EKF-DF) [
31] under the same model and scenario setting. For the filtering algorithms in [
30,
31]. We apply them to the distributed structure and use their classical state estimation methods to track underwater targets.
Table 1 and
Table 2 list the average error (
), maximum error(
) and minimum error(
) of different methods with Gaussian noise and Gaussian mixture noise. The standard deviation of the error (
) is also listed in
Table 2.
Figure 7a,b illustrate the positioning errors under Gaussian noise.
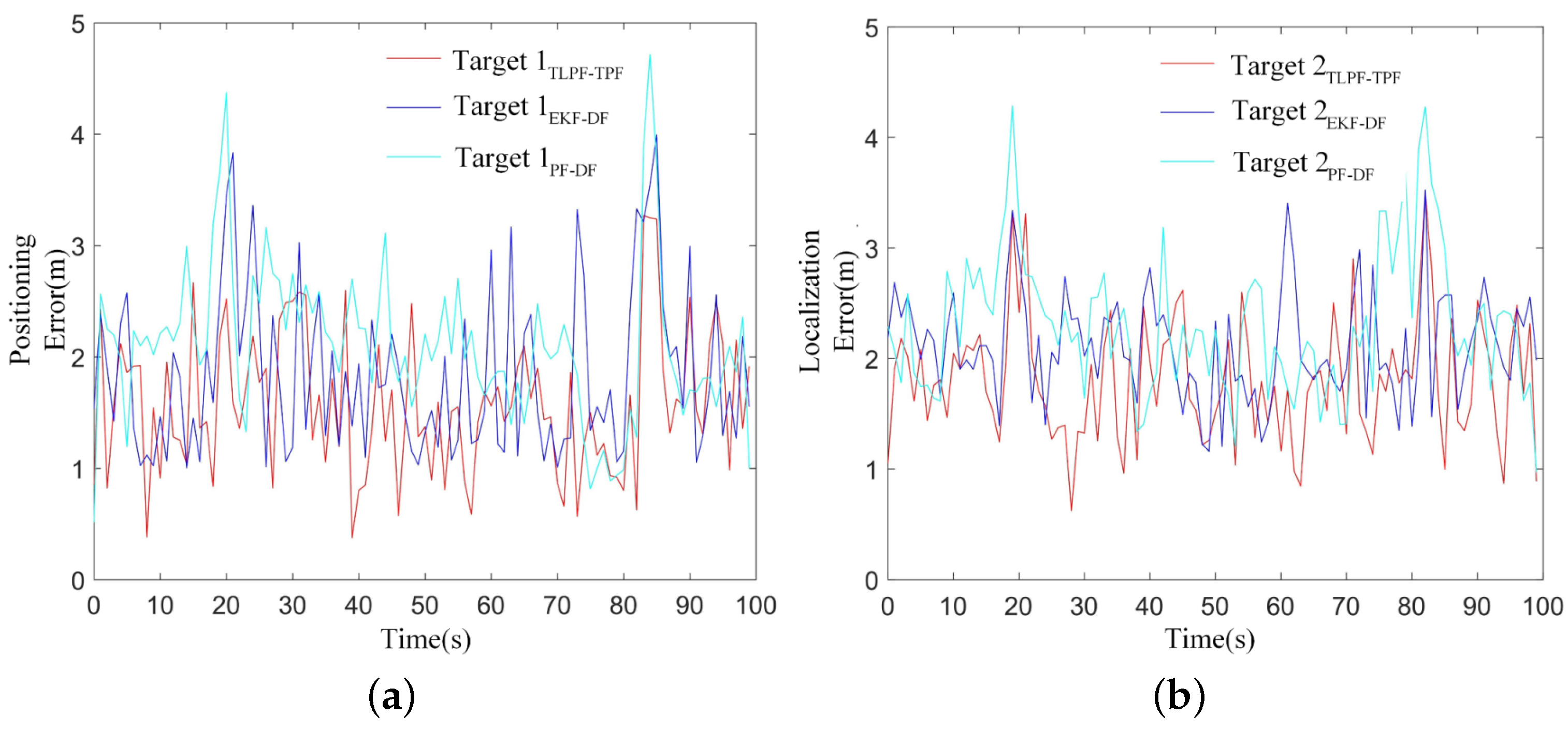
Figure 8a,b illustrate the positioning errors under Gaussian mixture noise.
From
Table 1 and
Table 2, we can conclude that the proposed algorithm achieves higher multi-target tracking accuracy in the presence of complex noises. Compared with PF-DF, its average positioning error is less by nearly 30%. Owing to the usage of the dynamic network resource allocation mechanism, the positioning accuracy of the three algorithms is relatively high and stable, which illustrates that the proposed dynamic allocation mechanism can support positioning algorithms for accurate and efficient observation under Gaussian noise.
Under Gaussian noises, it can be seen from
Figure 7a,b that the positioning error increases when the two targets enter the intersecting region when
t = 20 s and
t = 83 s. However, the proposed algorithm achieves higher positioning accuracy in the intersecting region through the whole tracking process.
According to
Figure 8a,b, when targets are close to each other under Gaussian mixture noise, the proposed method also achieves higher tracking accuracy compared with other methods. Even in the intersecting region, the proposed method can still ensure stable tracking performance while other methods degrade significantly.
Since the initial states plays a vital role in the traditional particle filter algorithm, we tend to evaluate the robustness of the proposed algorithm under different initial states. We change the initial state by adding a Gaussian noise
randn to it, where randn is a standard normal distribution and
is a parameter of standard deviation. The results are shown in
Table 3.
According to
Table 3, we can draw the conclusion that different initial states of nodes do not lead to an significant performance degradation, which proves the robustness of the proposed algorithm.
Next, we change the number of particles in the information fusion layer to illustrate its affect on the proposed algorithm. The details are shown in
Table 4, where
N is the number of particles.
As shown in
Table 4, the average error
decreases with the number of particles increases, which matches the characteristics of particle filter algorithm.
We also change the velocity of target 1 by adjusting a parameter
v. The trajectory of target 1 is:
As shown in
Table 5, the change in target 1 ‘s velocity has little impact on the average error, which illustrates the good stability of the proposed algorithm.
Besides, the uncertainty of the target’s trajectory may also have negative effects on the target tracking algorithm. To evaluate our proposed algorithm, we add a Gaussian noise on the
y-axis of target 1’s trajectory. The trajectory of target 1 becomes:
where
is the standard deviation of the Gaussian noise. The results are shown in
Table 6.
As shown in
Table 6, the influence of different
on the average error
is minor, which illustrates the robustness of our proposed algorithm.
We also evaluate our proposed algorithm with different kinds of non-Gaussian noises. Concretely, three different types of non-Gaussian noises are designed:
where
is a uniform distribution,
is a Laplace distribution and
is an exponential distribution. The results are shown in
Table 7.
As shown in
Table 7,
keeps within an acceptable range, which illustrates that the proposed algorithm can effectively cope with different non-Gaussian noises.
Moreover, we have tested our proposed algorithm on a Raspberry Pi (RPi) with a 1.4-GHz 64-bit quad-core processor, which is an applicable hardware setup for underwater monitoring network. Since the computation cost mainly depends on the particle filter algorithm for information fusion, we evaluate the average running time of the proposed algorithm in the information fusion layer with different numbers of particles. The details are shown in
Table 8.
In practical, is sufficient for accurate target tracking, the running time when can be neglected compared with the expensive data communication in the underwater environment. Thus, the time complexity of the proposed algorithm is acceptable for real-time applications.
To sum up, the proposed multi-target tracking algorithm can deal with complex environmental noises and the scenario when targets’ trajectories intersect, which achieves better performance compared with other tracking methods in terms of positioning accuracy and stability.


 .
.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}