Disruptive events that have negative effects on the CPSC are diverse, such as the repeated spread of the COVID-19 pandemic [
50], natural disasters [
51] and geopolitical conflicts [
52]. Although these disruptive events are different, their impacts on the CPSC can be summarized as demand mutation, uncertain delays, inefficient port productivity, and slow turnover [
50,
51,
52]. Furthermore, the commonality of these restrictions is that they are often manifested by the inefficiency, stagnation and congestion of container ports. Therefore, the corresponding constraints are modeled as uncertain container handling waiting time delay and berth allocation delay, thereby exploring their impact on the modified two-stage CPSC and further designing the resilience regulation strategy.
6.1. The Effect of CPS on the Modified Two-Stage CPSC
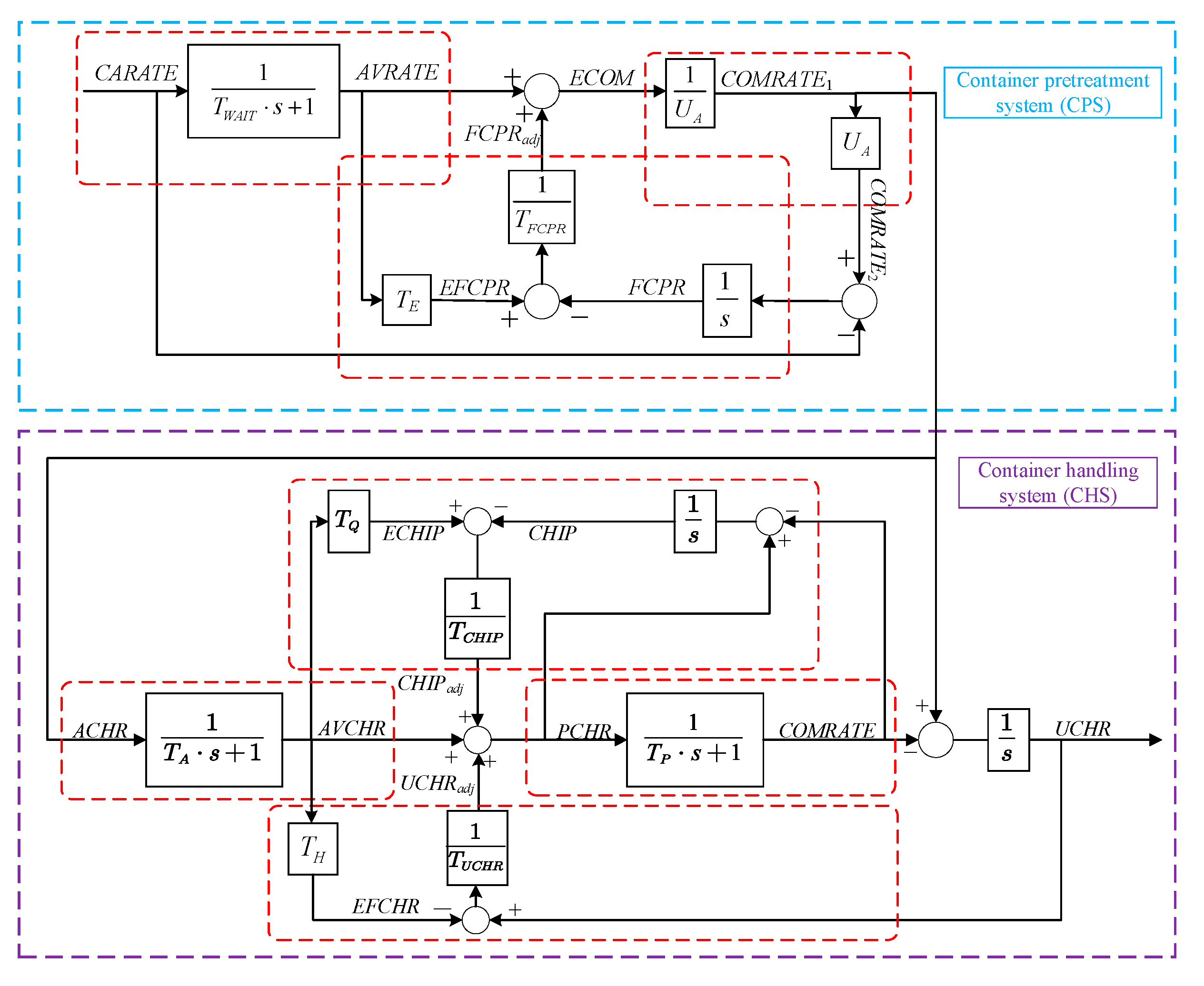
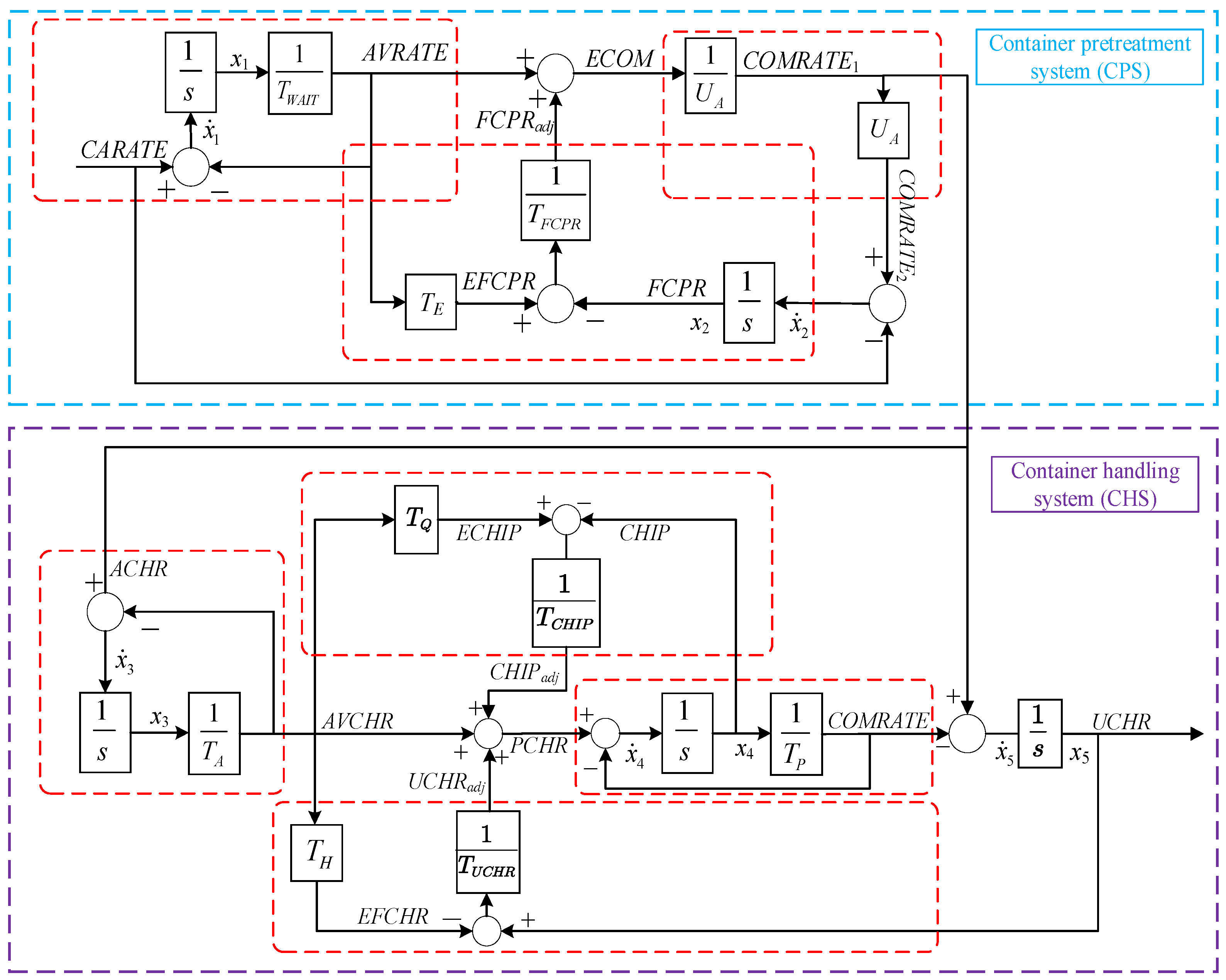
Container uncertain waiting delays and berth allocation delays under disruptive events are integrated into the container preprocessing stage, thereby constructing a CPS. Studying the overall effect of the CPS on the modified two-stage CPSC, especially the change of the main independent variable TWAIT, can effectively reflect the adverse influences of disruptive events, and the preparations for the follow-up regulation research can be made.
In simulation, the oscillation level and setting time are used to represent the fluctuation degree and stability time, respectively. According to our investigation, the continuation of disruptive events has caused varying congestion or disruption in the CPSC. Specifically, under disruptive events, the specific constraints and the general scheme can be summarized as follows: (1) The impact of the COVID-19 pandemic on the CPSC is strong [
50], including extremely high transportation prices, transportation accessibility, and extension of supply chains. (2) The median duration of port disruption caused by natural disasters was 6 days, with 95% of them being 22.2 days [
51]. (3) A crisis in the CPSC caused by the conflict between Russia and Ukraine reveals the impact of changes in EU consumer prices in situations of container ports destruction [
52]. Combined with the commonality of the investigated supply chains, this paper uses the uncertain container waiting delay and allocation delay links set by the CPS system to explore the impact of disruptive events on the modified two-stage CPSC system.
On this basis, we refer to the real-time data of the most congested container ports in the world, and take the congestion data of the top 20 container ports as an example to calculate the average value of nearly a month. Without losing generality, the system is set to take one day as a cycle. The average waiting time is set to 6 days; the average port handling time is 4 days; the expected pretreatment cycle is 1 day; and the constant TA = 6 days. TA can be given different values according to the specific prediction mechanism, but TA does not change the overall response trend of the system to a large extent; TQ and TP are set to be the same value, that is, TQ = TP = 4 days.
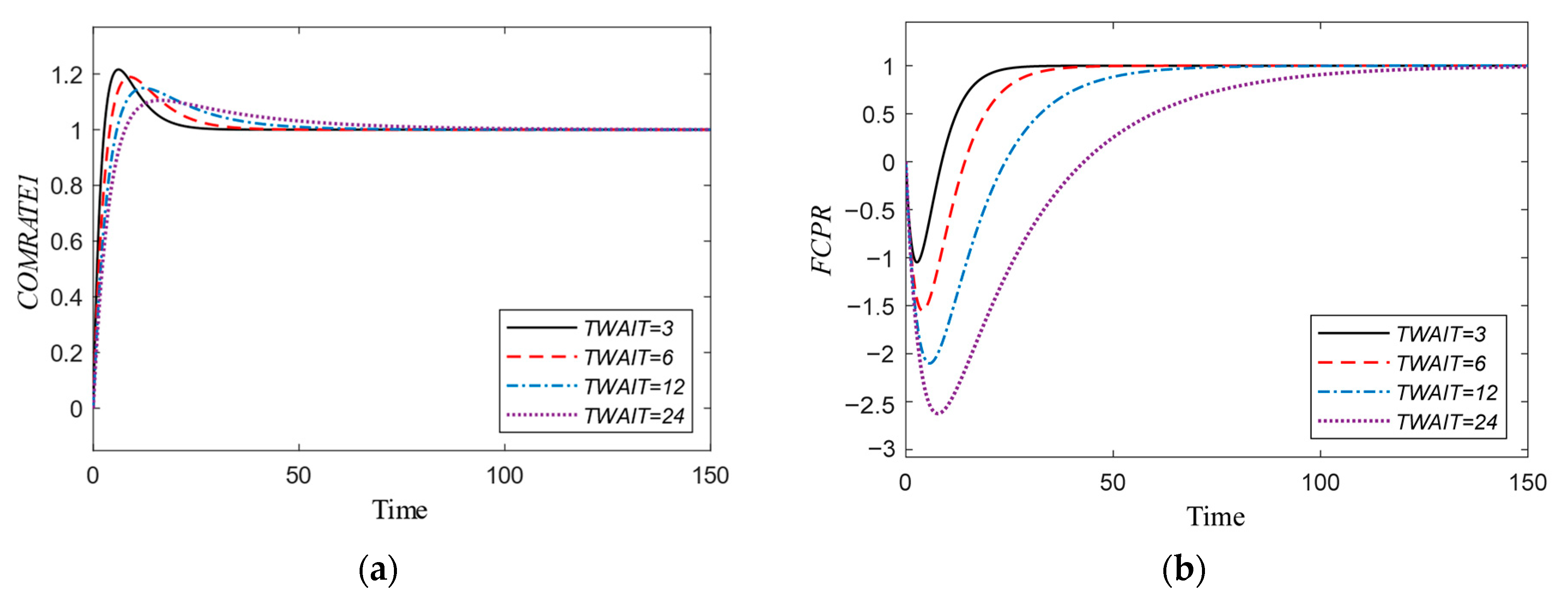
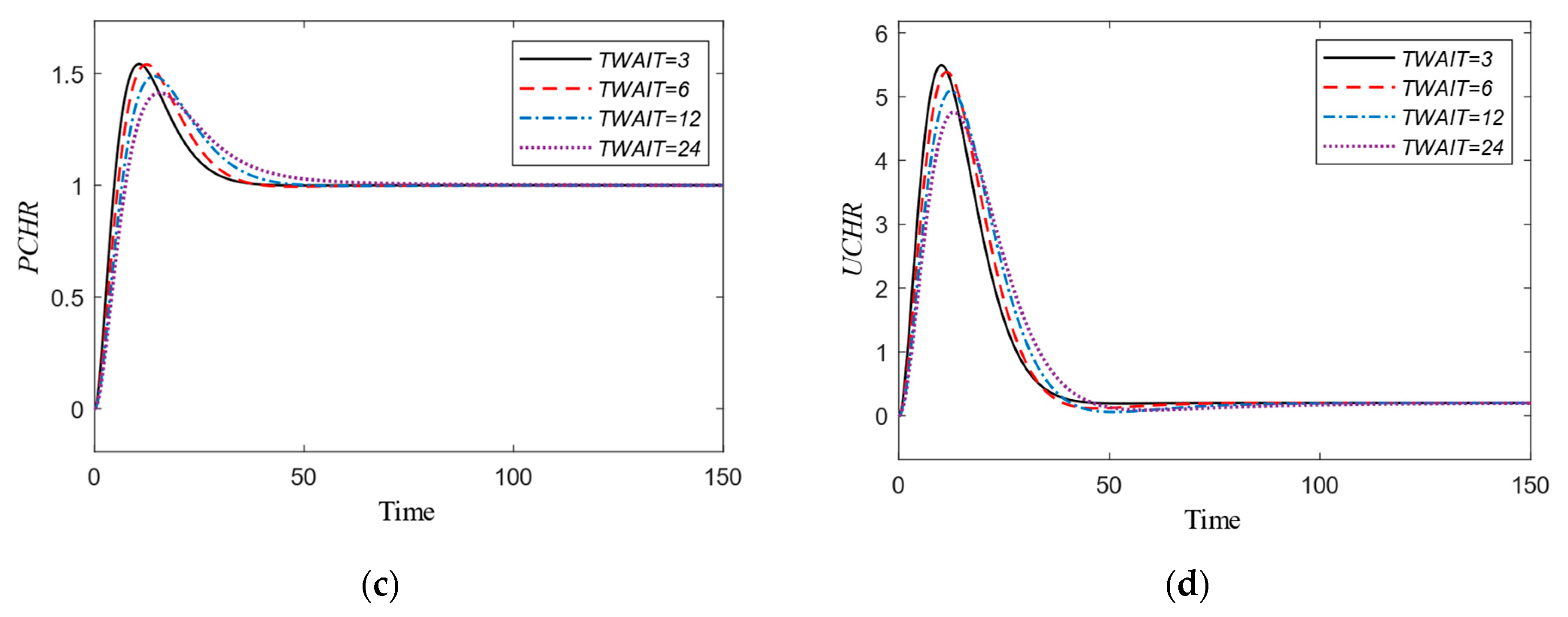
Figure 8 shows the effects of
TWAIT on the dynamic behaviors of responses in the CPS. It should be emphasized that, compared with other three performance indicators, it is interesting to see that the
OSC shows an opposite change trend, because when the waiting time increases, at the cost of longer setting time, the fluctuation becomes less. Furthermore, the responses always experience an initial rise, which is particularly evident in the
UCHR response. The reason for this is that the mutated step demand is transmitted to the CPSC through the container preprocessing system, and the responses has to satisfy the output signal transmitted by the CPS. Then, with the continuous port productivity, the
UCHR level is gradually reduced to the required level. Consistent with the analysis in
Section 3.4, when
TWAIT increases, the oscillation levels of the
UCHR and
PCHR decrease, which are achieved at the expense of longer setting time. In comparison,
CHIP is less sensitive to the change of
TWAIT. When
TWAIT is small, the oscillation peak of
CHIP does not change significantly, which proves that when the CPSC is less affected (small
TWAIT), a certain balance can still be maintained between the port productivity and the planned container handling requirement.
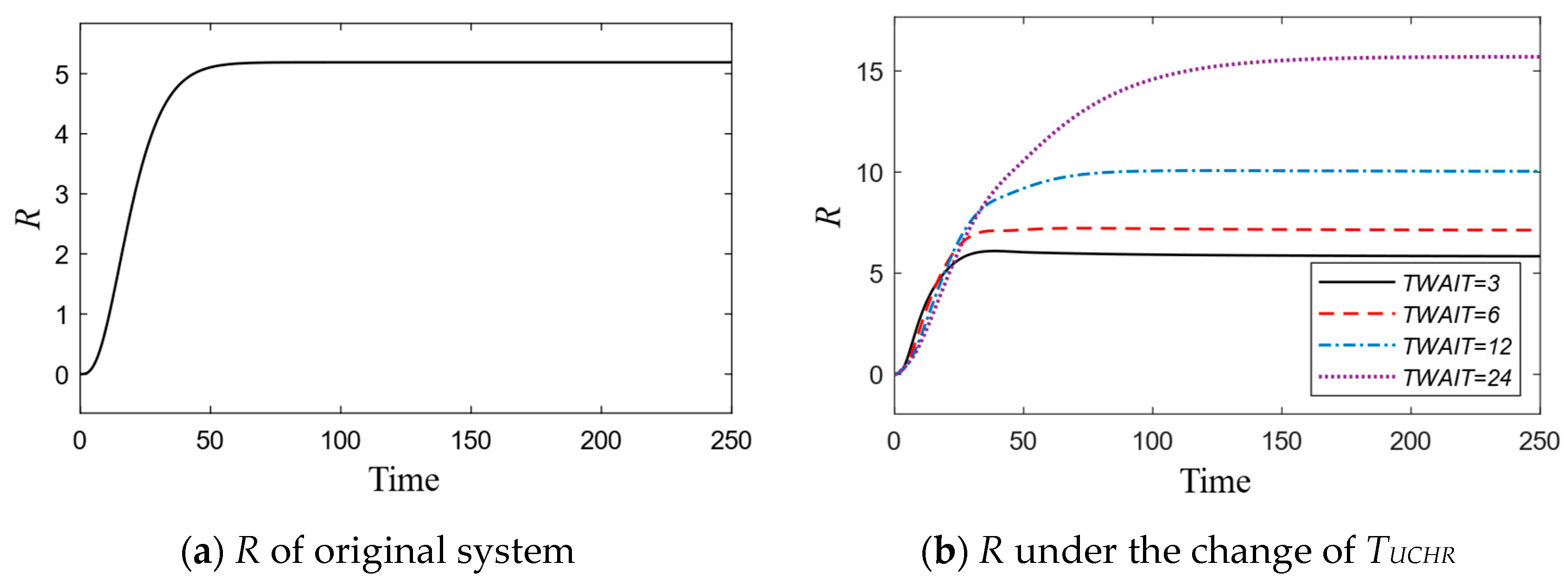
In addition, the modified two-stage CPSC is abbreviated as the original system. The according resilience
R is shown in
Figure 9.
Figure 9b shows that a small
TWAIT can make the resilience response have a faster response speed. When
TWAIT increases, the response speed of
R becomes slower and the final stable value is obviously larger, which means that when the modified two-stage CPSC system is more seriously affected (larger
TWAIT), the resilience will be significantly reduced. Compared with the initial system, CPS has weakened the resilience to a certain extent under larger values of
TWAIT, and the resilience is reduced by 66.95% in the worst case.
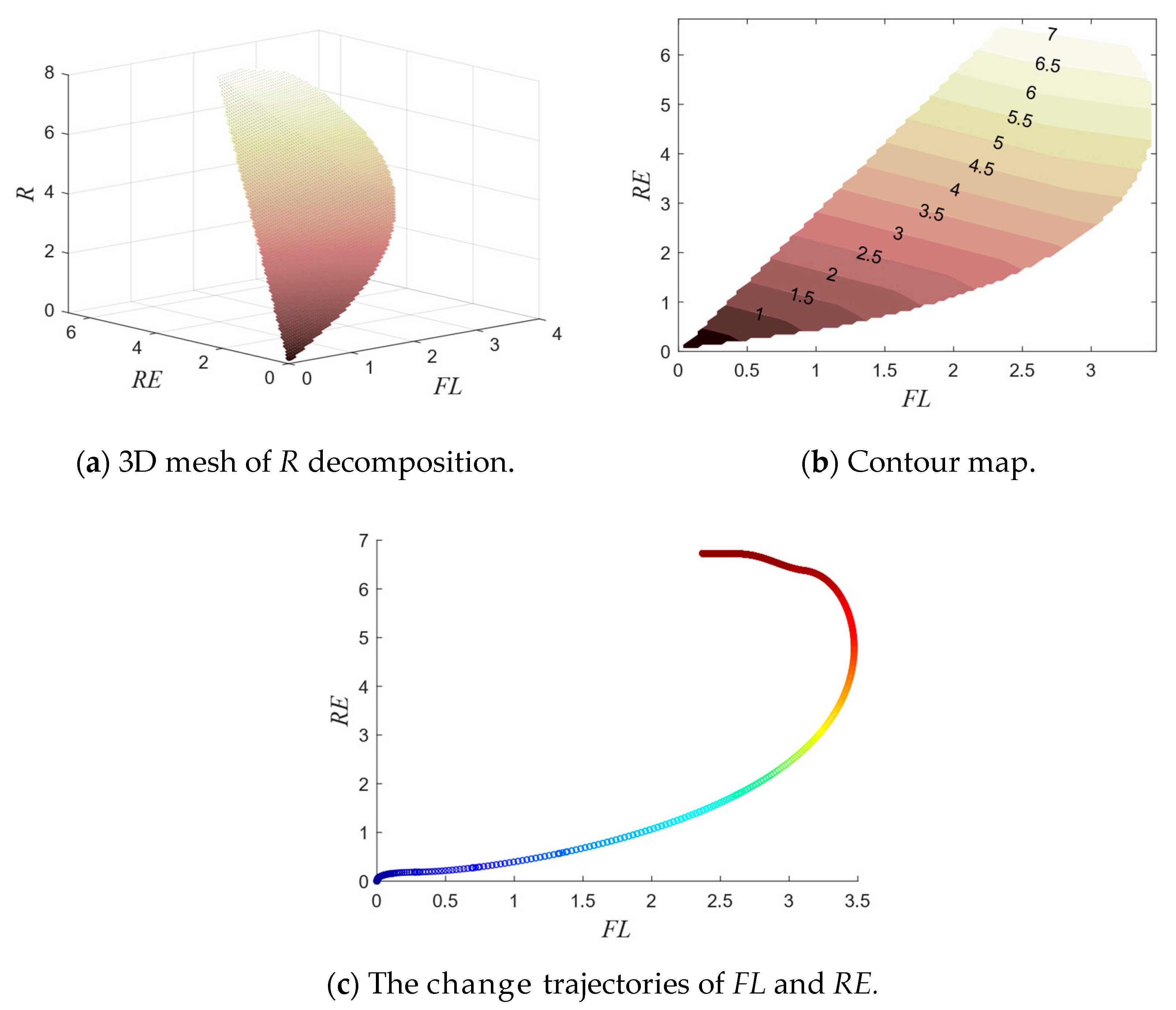
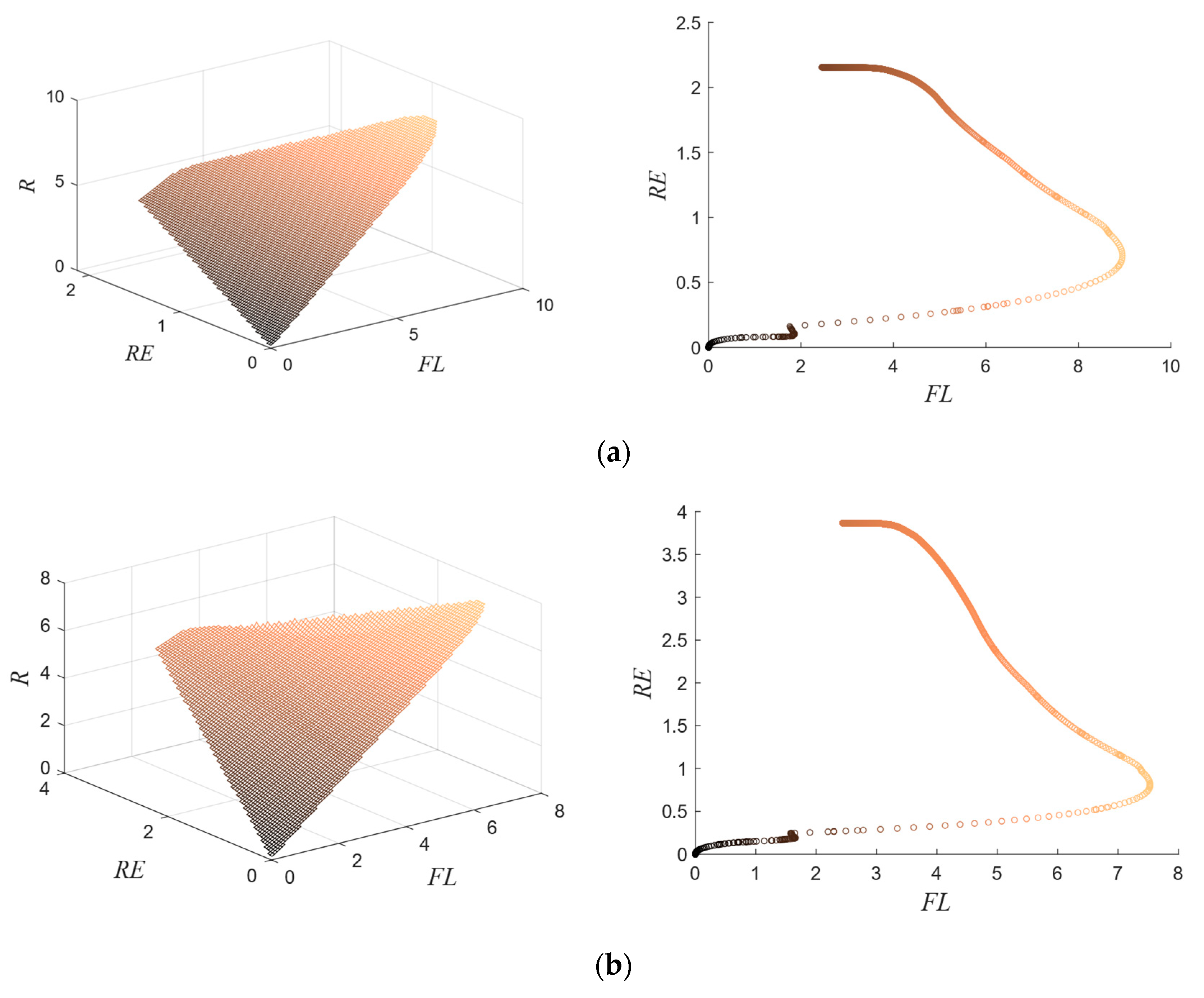
Based on the derived R, the effect of FL and RE on R can be further analyzed by decomposing R.
Figure 10 shows the decomposition of
R, revealing the relationship between the resilience index
R and the internal two-dimensional factors. As shown in
Figure 10a,b, both
RE and
FL have a gain effect on
R at the current value, and compared with the affordability, the gain of the recovery to
R is significantly greater than the affordability, which means that the recovery accounts for more weight than the affordability, and the resilience is more affected by the recovery.
Figure 10c represents the trajectory of
RE and
FL moving with
R during operation.
FL and
RE eventually move to 2.4 and 6.9, respectively, which is in line with the trend shown by the 3D grid diagram and contour diagram.
Finally, the relevant specific values in simulations are measured and recorded in
Table 4. Further, the weakening degree caused by the CPS is shown in the
Table 5.
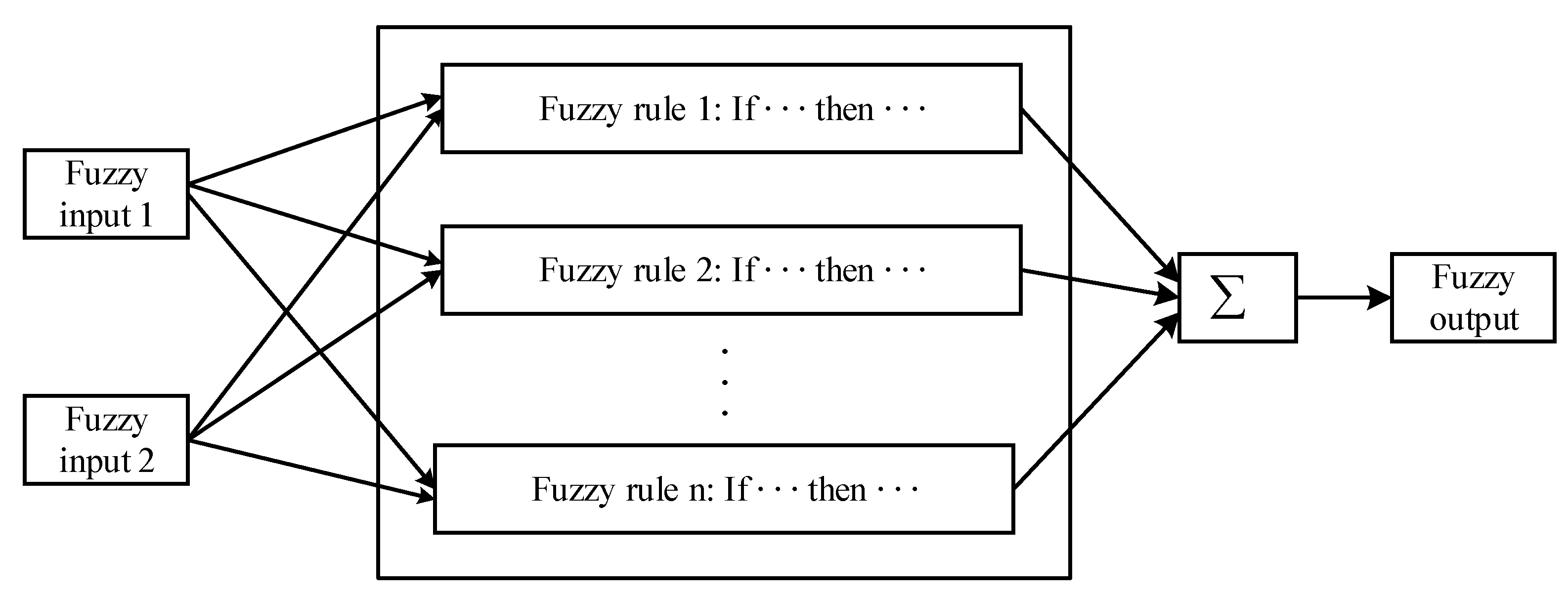
6.2. Adaptive Fuzzy Double-Feedback Adjustment Strategy for Modified Two-Stage CPSC System
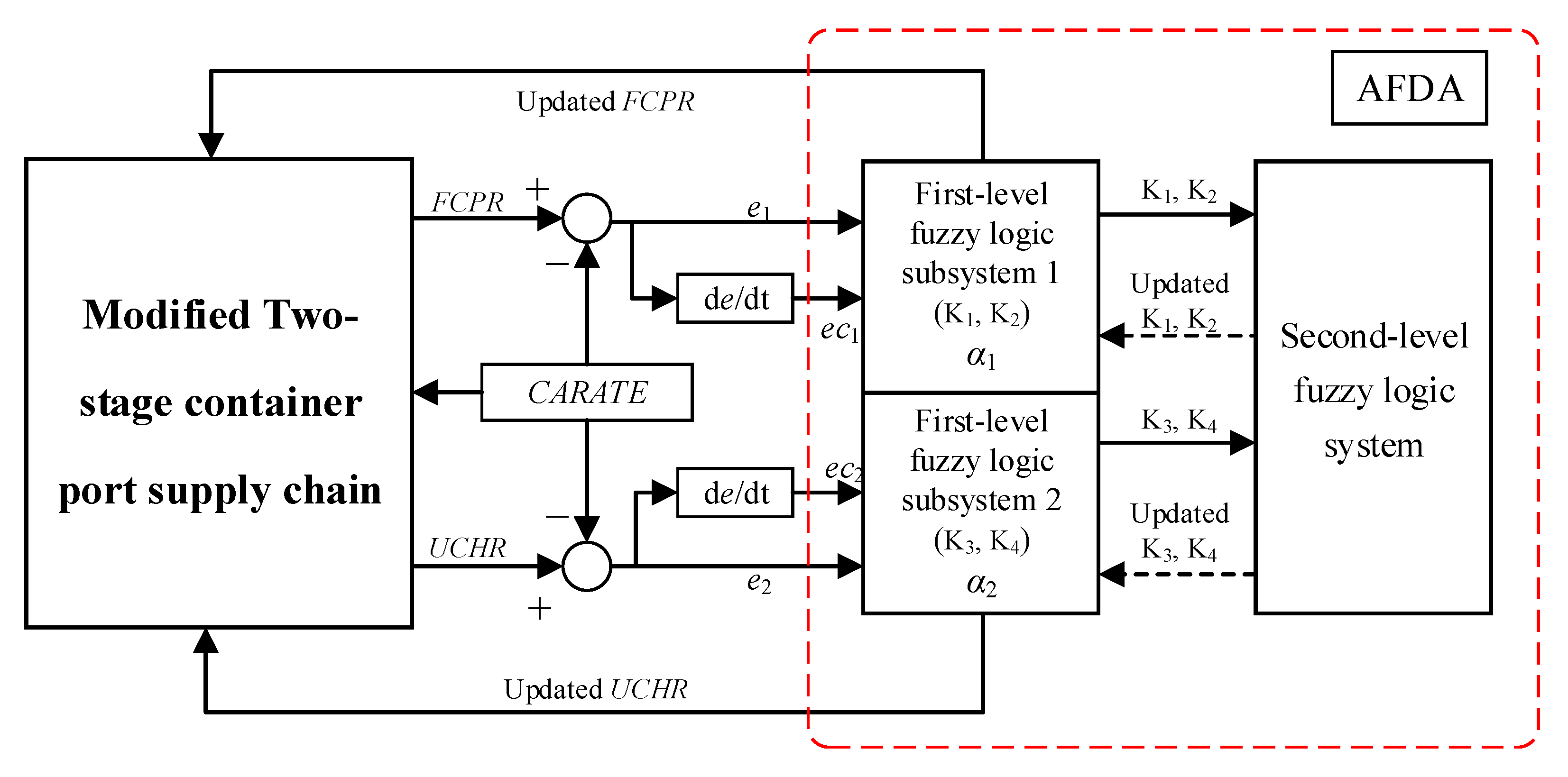
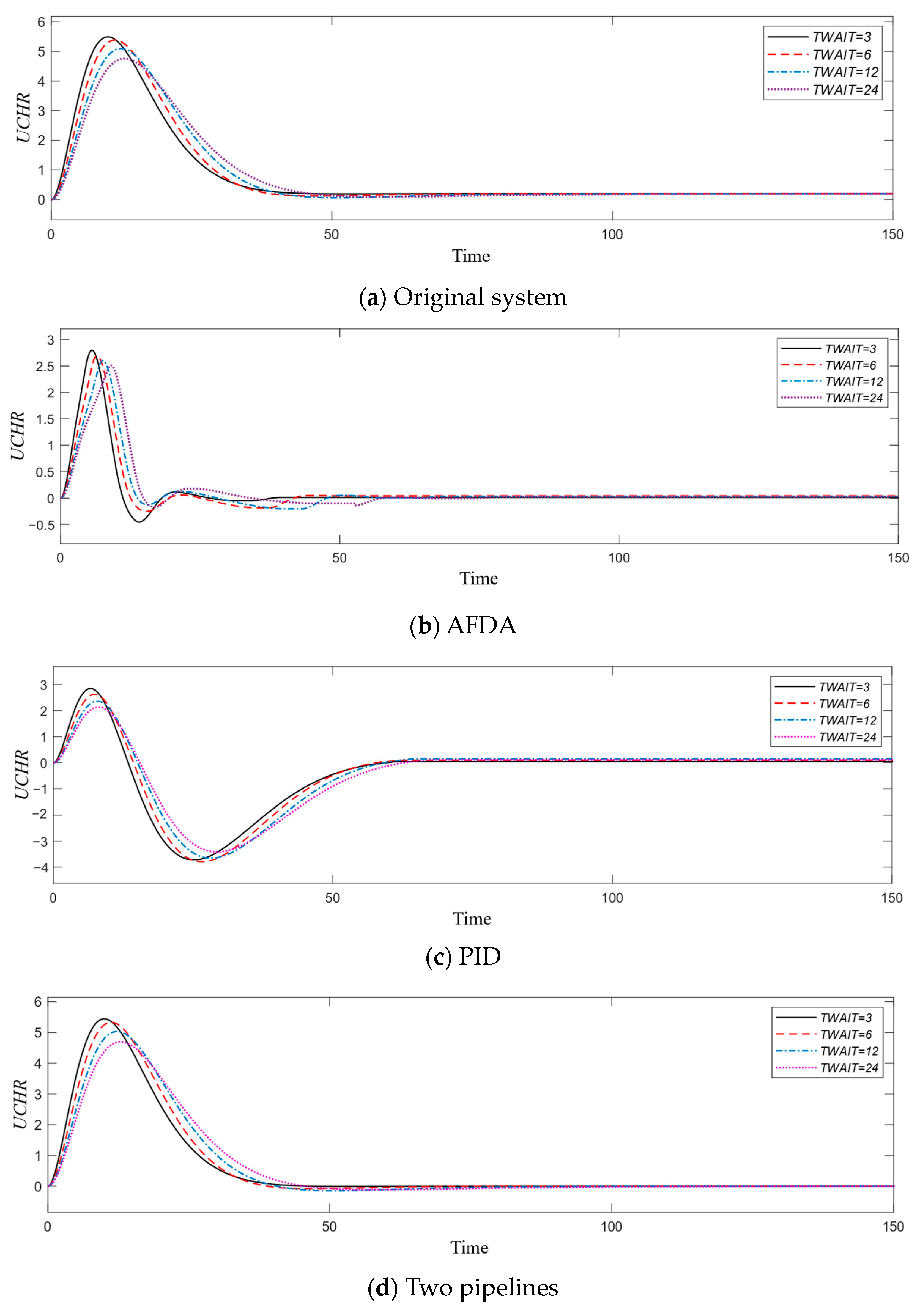
The control objective of the modified two-stage CPSC system is to design appropriate regulation strategies to minimize the negative impact and achieve rapid recovery under disruptive events. An adaptive fuzzy double-feedback control structure is established based on two feedback pipelines. Through the effective control of the smoothing coefficients, the adaptive adjustment of the modified two-stage CPSC system is realized. Similarly, the
UCHR is taken as the main control object, and the uncertain waiting time delay is taken as the independent variable. At the same time, the AFDA strategy is compared with the original system, PID, and two pipelines (TP) to verify its effectiveness. The simulation results are shown in
Figure 11 and
Figure 12.
The simulation results are recorded in
Table 6,
Table 7 and
Table 8. In
Figure 11, the optimization effect of each method can be easily compared and the effectiveness of the proposed AFDA is verified. Compared with the original system, the oscillation level under disruptive effects is significantly reduced, and the stabilization time is shortened. Comparing the data recorded in
Table 6 with
Table 4, the
OSC can be reduced by up to 49.53% at the maximum, and the
ts can be shortened by up to 35.94%. When the container waiting time delay is (3, 6, 12, 24) days, AFDA can ultimately shorten the stability time by (28.25%, 28.62%, 35.44%, 35.94%), respectively.
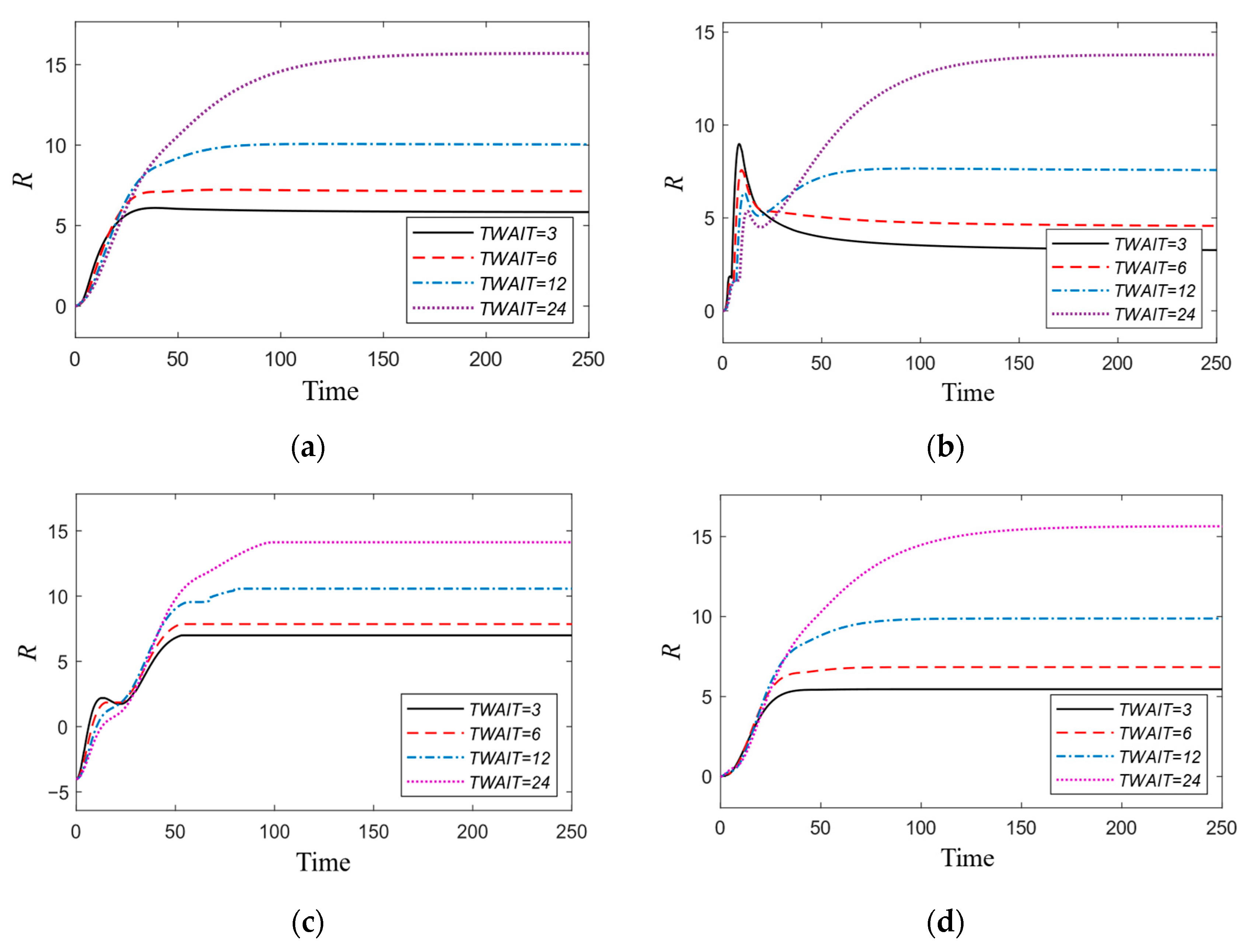
Figure 12 shows the resilience under different methods. The increase in
TWAIT significantly decreases the resilience. However, using the AFDA strategy, the resilience is enhanced. It is worth noting that
R under the AFDA strategy has an obvious initial rapid rise. The reason is that when the feedback signal is used for adjustment, the initial rise of response affects the measurement of
R. Eventually, both the response and
R can be restored to the stable states.
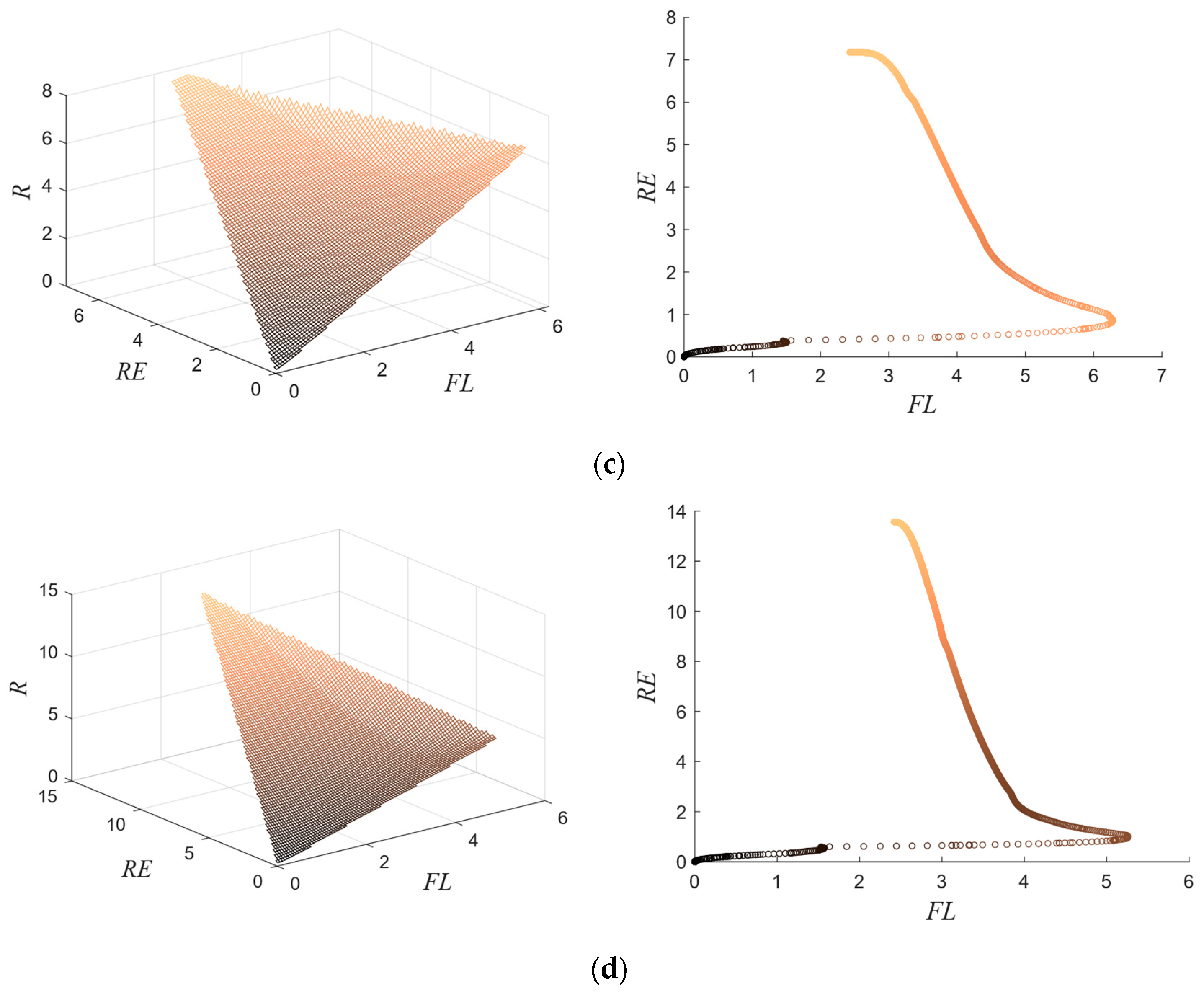
Finally, for
R with AFDA, it can also be decomposed to further explore the inner two-dimensional mechanism of resilience, as shown in
Figure 13.
Figure 13 shows that when
TWAIT is small,
R is significantly affected by
FL more than
RE. This trend begins to change as
TWAIT grows larger. When the value of
TWAIT becomes large,
R is obviously dependent on the change of
RE, while the change of
FL is no longer obvious.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















