1. Introduction
The prevailing mission-based paradigm for ocean color remote sensing typically involves high-cost satellite platforms launched and operated by government agencies such as NASA, NOAA, ESA, and JAXA. These platforms host state-of-the-art ocean-viewing radiometers with design and sensitivity specifications appropriate for delineating a comparatively weak water-leaving radiance from the total radiant signal detected at the top of the atmosphere. The current suite of such operational ocean color sensors includes NASA’s Moderate Resolution Imaging Spectroradiometer (MODIS; Aqua satellite), NOAA’s VIIRS (SNPP and NOAA-20 satellites), the Ocean and Land Colour Instrument (OLCI; Sentinel-3 A/B satellites), and the Second-Generation Global Imager (SGLI) onboard the GCOM-C satellite. All of these sensors provide multi-spectral band sets (visible, near-infrared (NIR), and shortwave infrared (SWIR)) with daily coverage at approximately kilometer-scale spatial resolution. However, even kilometer-scale spatial resolution may be unable to resolve finer-scale features near rivers and estuaries that are critical for scientific and environmental resource management applications.
In contrast to government-sponsored, large satellite missions, commercial entities are now deploying low-cost cubesats with much higher spatial resolution imaging capability. Planet Labs currently has ~200 (as of November 2022) orbiting nanosatellites that provide high-temporal-resolution monitoring of the Earth’s surface at a spatial resolution previously available only by the high-cost tasking of a few specialized satellites such as WorldView 3/4 [
1]. The majority of these nanosatellites (known collectively as PlanetScope (PS)) host a multispectral digital camera with blue, green, red, and NIR bands, which image the earth at very high spatial resolution (3.125 m ground resolution at nadir). PS data have been used to monitor volcano activity [
2], assess vegetative index [
3,
4], aid agriculture studies [
5,
6], study lake dynamics [
7], determine high-resolution topography [
8], detect oil spills [
9], monitor rangeland [
10], and monitor disasters [
11]. PS applications for aquatic environments include monitoring coral reefs [
12] and water quality [
13,
14],
Sargassum detection [
15], detection of river ice and water velocities [
16], high-resolution bathymetry [
17], and monitoring seagrass beds [
18].
Other commercial groups are also exploiting nanosatellite technology for a wide variety of remote sensing applications [
19,
20,
21,
22,
23]. However, there have been only a small number of studies to assess these commercial nanosatellite data sources as a viable solution for ocean color remote sensing, i.e., detection of the water-leaving radiant signal in the visible bands after removal of the intervening atmospheric contamination [
24]. Maciel et al. studied the potential for cubesats to provide remote sensing reflectance over very turbid inland lakes [
25]. Vanhellemont applied the dark spectrum fitting (DSF) aerosol correction method [
26,
27] to PS data [
14] and also found success in the PS red bands over very turbid waters.
More generalized ocean color applications of PS data will require removal of the atmospheric portion of the total sensor signal at the top of the atmosphere. Nearly 30 years ago, Gordon and Wang set the standard for atmospheric correction by using a relationship between two relatively narrow NIR or SWIR bands to estimate the aerosol radiance contribution in a satellite’s total path radiance, Lt [
28,
29]. The use of two NIR bands is still one of the primary methods used today for characterizing and removing the aerosol radiance during atmospheric correction. However, the design of many small satellites is focused on terrestrial observation, and these sensors do not have the NIR/SWIR wavelengths needed for the standard method of atmospheric correction for ocean color. This inadequacy suggests that alternative methods should be explored for atmospheric correction [
30,
31]. In this paper, we present an alternative atmospheric correction method in order to exploit PS data for ocean color applications. We selected machine learning (ML)-based techniques as a means to convolve data from traditional ocean color sensors, which permit a complete atmospheric correction, with PS data that are otherwise inadequate for this purpose.
2. Materials and Methods
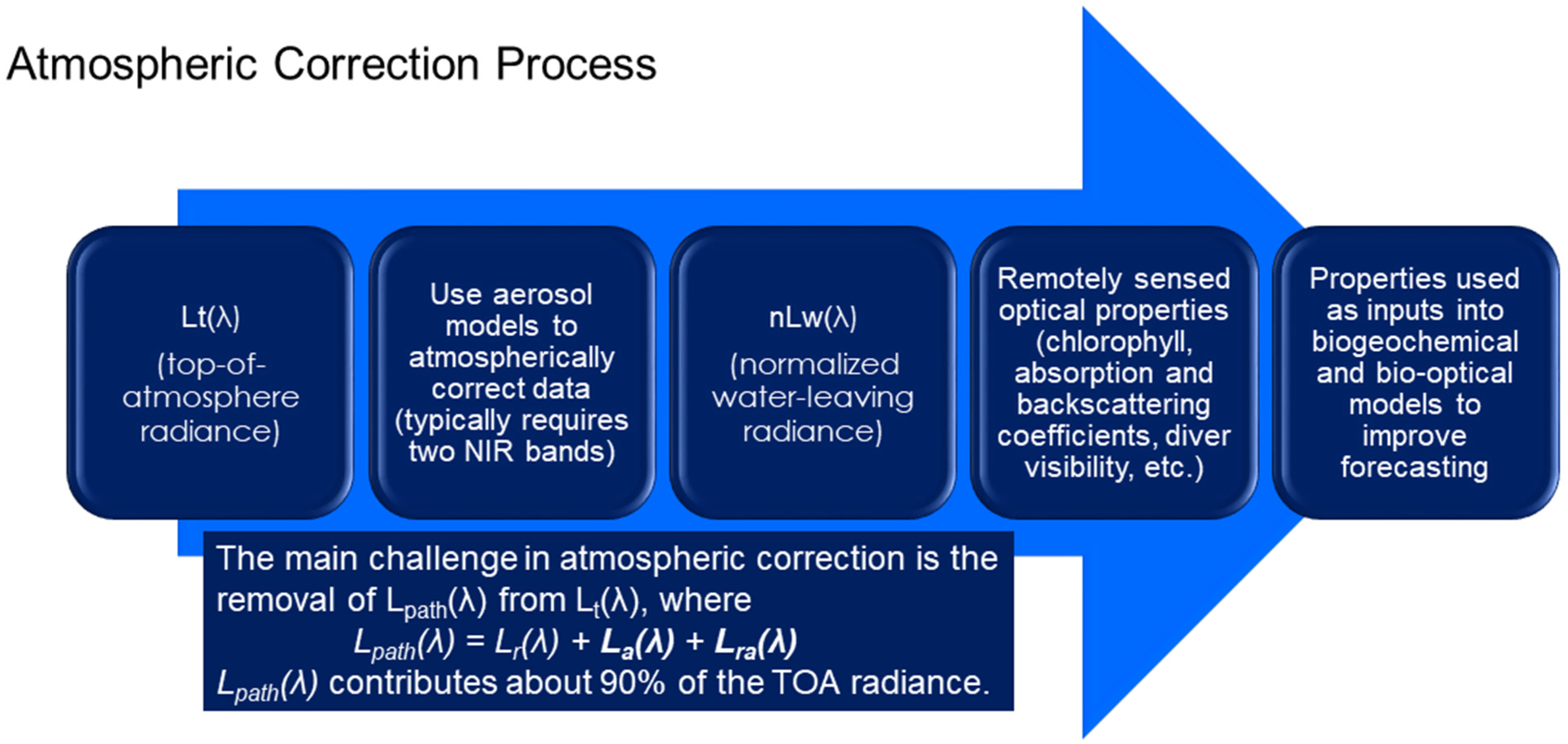
The lack of NIR/SWIR bands in PS data, as well as most other small satellites launched primarily to monitor land, represents a challenge in performing atmospheric correction. Roughly 90% of the total Lt recorded by the satellite represents atmospheric radiance and must be removed prior to calculating Lw, and ultimately the follow-on products, whichinclude bio-optical water properties. The atmospheric signal consists of Rayleigh scattering (Lr, scattering by molecules, calculated from sensor viewing geometry) and aerosol scattering (La, modeled from radiances in two NIR/SWIR bands). Typical coarse-resolution ocean color sensors such as MODIS, VIIRS, SGLI, and Sentinel-3 OLCI have 9, 11, and 21 bands, respectively, two or more of which are at NIR or SWIR wavelengths needed to atmospherically correct the visible bands. These types of sensors are equipped with bands that are fairly narrow, roughly 15–20 nm in bandwidth. For the PS nanosatellites, however, there are typically only 4–5 bands available, with broader bandwidths (60–90 nm) and only one NIR band. Planet has started to launch flocks of “Super Dove” nanosatellites equipped with an additional red-edge band (705 nm) that could potentially aid in improved atmospheric correction, at least in open ocean areas where the signal is dominated by water. Thus, while it is promising that PlanetScope nanosatellites and other small satellites typically have 1 NIR band and current and future “Super Dove” nanosatellites possess a red-edge band, scientific challenges exist due to the lack of additional bands required for correction routines.
The Hyperspectral Imager for the Coastal Ocean (HICO) was a sensor developed by the Naval Research Laboratory (NRL) and housed on the International Space Station from late 2009 to 2014 [
32]. It measured Lt from 352 to 1079 nm at a bandwidth of about 5 nm. In order to atmospherically correct HICO using the standard Gordon and Wang atmospheric correction, Rayleigh coefficient and aerosol model coefficient look up tables (LUTs) were developed for HICO by NASA’s Ocean Biology Processing Group (OBPG). In addition, values for other required parameters for processing Planet nanosatellite data, such as solar irradiance, Rayleigh optical depth, and the absorption and backscatter of pure water, were available at 1 nm intervals. These LUT coefficients and values were convolved against the Planet Relative Spectral Response (RSR) functions to generate the Rayleigh and aerosol model tables and other coefficients representative of the Planet bands’ wavelength characteristics. Additionally, not every Planet nanosatellite has the same RSR. The RSR varies depending on the flock (group of nanosatellites that are built and launched together), which can lead to different center wavelengths during the convolving process (e.g., red wavelength centered at 635 nm for the PlanetScope “0F” Series and 644 nm for the PlanetScope “E” Series).
There is a difference between the wavelength centers of the closest Planet and VIIRS bands.
Table 1 shows that the Planet nanosatellite center wavelengths are within 4–8 nm (when compared to VIIRS) for the blue band, 6 nm for the green band, and 27–36 nm for the red band. The variation in the blue and red bands represents the range of wavelengths in the 4 different series of the initial Planet sensors. The blue and green bands are close enough to the VIIRS center wavelengths to use coincident VIIRS imagery in building a model to atmospherically correct the nanosatellites, but the red band is likely too distant to be reliably used for this approach. All of the imagery from the nanosatellites used in this study were from the PlanetScope “10”, “0E”, and “0F” series. All three of these series have the blue band centered at 494 nm, but the “10” and “0F” series have the red band centered at 635 nm while the “0E” series is centered at 644 nm.
During this study, we demonstrate how we can atmospherically correct satellite sources, such as Planet nanosatellites, that are not primarily designed for ocean color remote sensing. We use two different methods and assess the result of each method. The first method uses the nanosatellites’ red and NIR bands to automatically select a pair of bounding aerosol models to remove the aerosol contribution from Lt within the visible bands. This method uses the traditional Gordon–Wang approach for aerosol model selection and the convoluted LUTs and parameters mentioned prior. The impact of using a red band as the first NIR band in data processing is that the signal in the red band is interpreted as aerosol radiance. As a result, if there is valid non-aerosol water leaving radiance such as in sediment-laden waters, the estimation of the aerosol component can be artificially high and the Lw estimates in the visible bands will be negatively impacted. This is more evident in the locations where the red band has higher signal, for example in turbid coastal waters. However, there is another artifact of this approach. During the Gordon–Wang atmospheric correction process, the signal in the second NIR band identified as “aer_wave_long” within the atmospheric correction module and red band in the cast of Planet data is iteratively reduced towards 0 during the execution of the algorithm. When using two true NIR bands, after atmospheric correction, the values in the two NIR bands will already be close to 0 even in turbid waters. This is irrelevant in further processing since those NIR bands are not used in ocean color bio-optical algorithms. However, in the case of the Planet datasets, this is a significant drawback since the red band, used as the “aer_wave_short” band, is needed for bio-optical algorithms. Therefore, this other artifact of using a red band as the “aer_wave_short” band in processing is that after processing there is almost no signal remaining in the red band to use in bio-optical ocean color algorithms.
In order to address the negative impact on the red band’s nLw value caused by using the red band as “aer_wave_short” in the atmospheric correction process, the red band in the Planet L1B file was duplicated, allowing one of the duplicated bands to participate as the “aer_wave_short” band and the other to participate as the visible red band to be used in ocean color bio-optical algorithms. The creation of the Planet standard L1B data files was adjusted to duplicate the red band. This resulted in a 5-band Planet L1B file with the 4th band being a duplication of the 3rd band. All supporting sensor data files were adjusted to accommodate for this duplication. The computation in processing then used the 4th and 5th bands as the “aer_wave_short” and “aer_wave_long” bands, leaving the 3rd band as a visible red band. The atmospheric correction process reduced the nLw values in the 4th and 5th bands towards 0 as it selected an aerosol model used to compute the aerosol radiance (La) estimate. Then, the La and Lr estimates were subtracted from the visible bands’ Lt measurements to compute their Lw and ultimately their nLw values. The 3rd band was treated as the visible red band in this process and its nLw values were computed along with the nLw estimates for the other two visible bands.
This solution yields a “baseline” for an automated solution to atmospherically correct imagery from satellites that do not have the required bands needed for atmospheric correction. The Gordon–Wang aerosol model selection process using two bands in the NIR/SWIR is very sensitive, so using the red band where the water-leaving radiance is greater than 0 leads to higher uncertainties in the derived water-leaving radiances. The second method for atmospherically correcting these datasets is to develop models that determine relationships between Lt, Lr, and nLw for each of the VIIRS’ visible bands that closely coincide with those from Planet’s nanosatellites. Once an atmospheric correction model was developed from VIIRS training values and evaluated against VIIRS values not within the training set, it was applied to the nanosatellite Lt and Lr values to predict nLw at any given pixel location within the scene that was geographically coincident to the training locations (MOBY and AERONET-OC Venice in situ locations). Finally, we compared our results to those produced from ACOLITE, which uses the dark spectrum fitting (DSF) atmospheric correction approach.
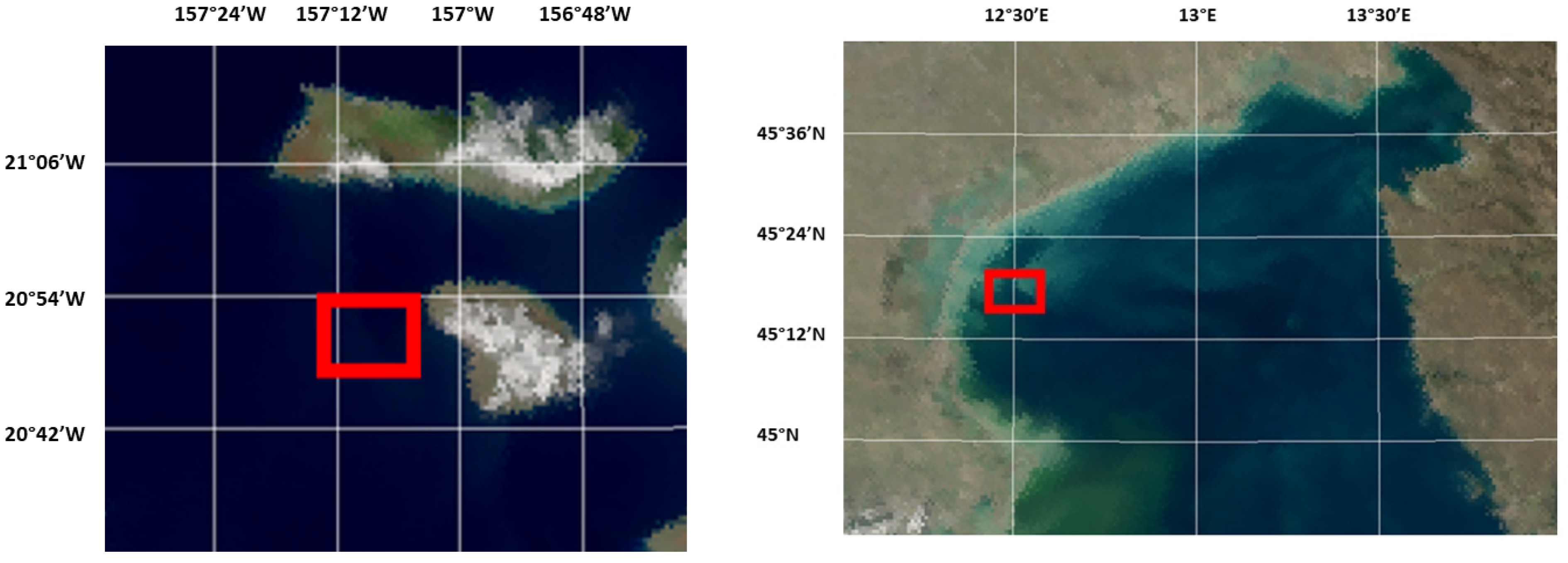
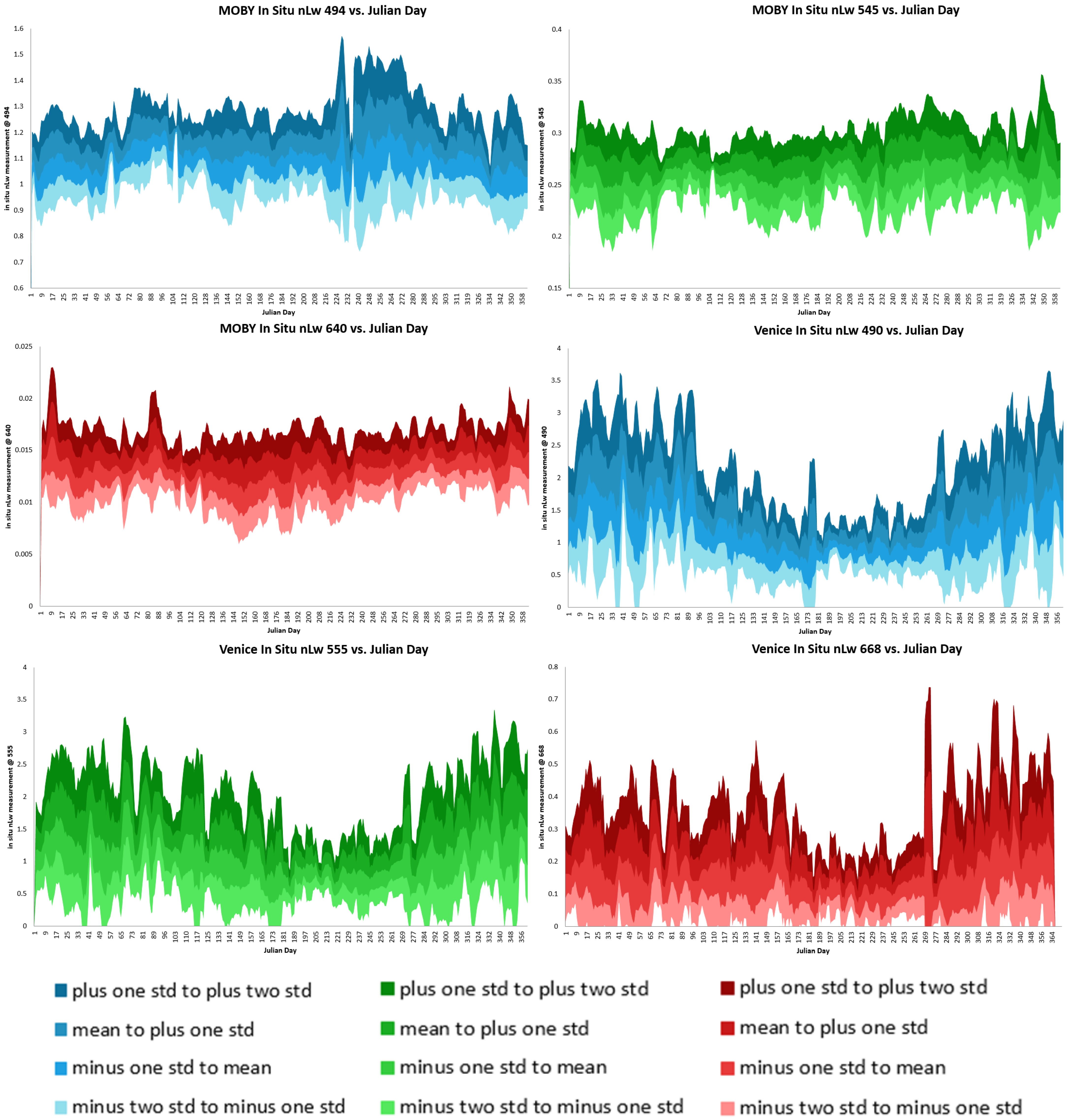
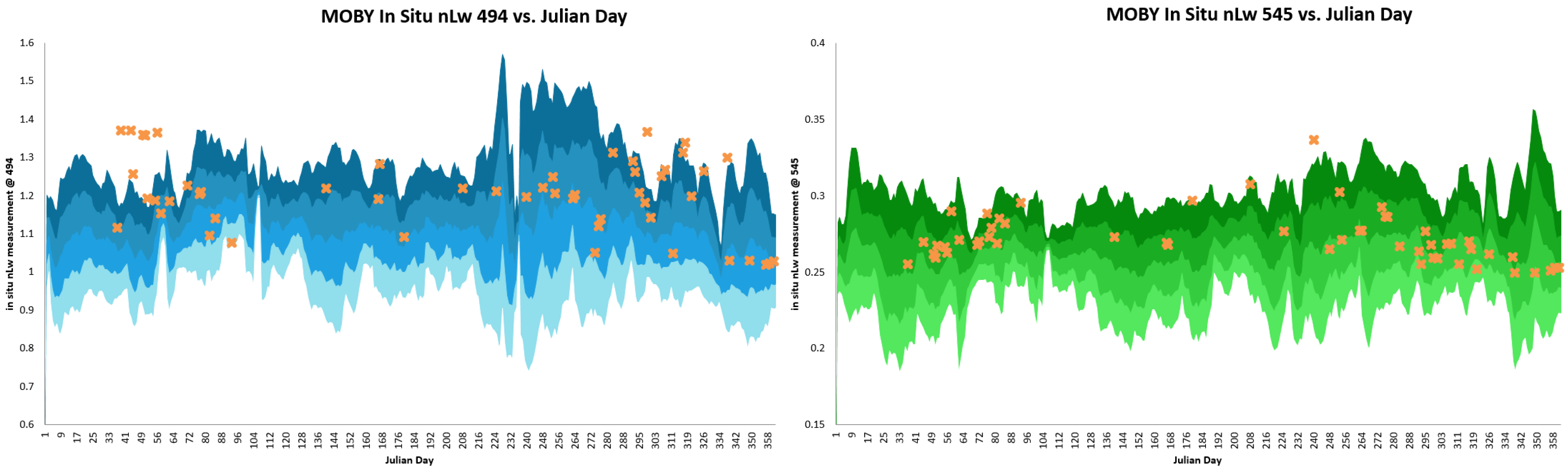
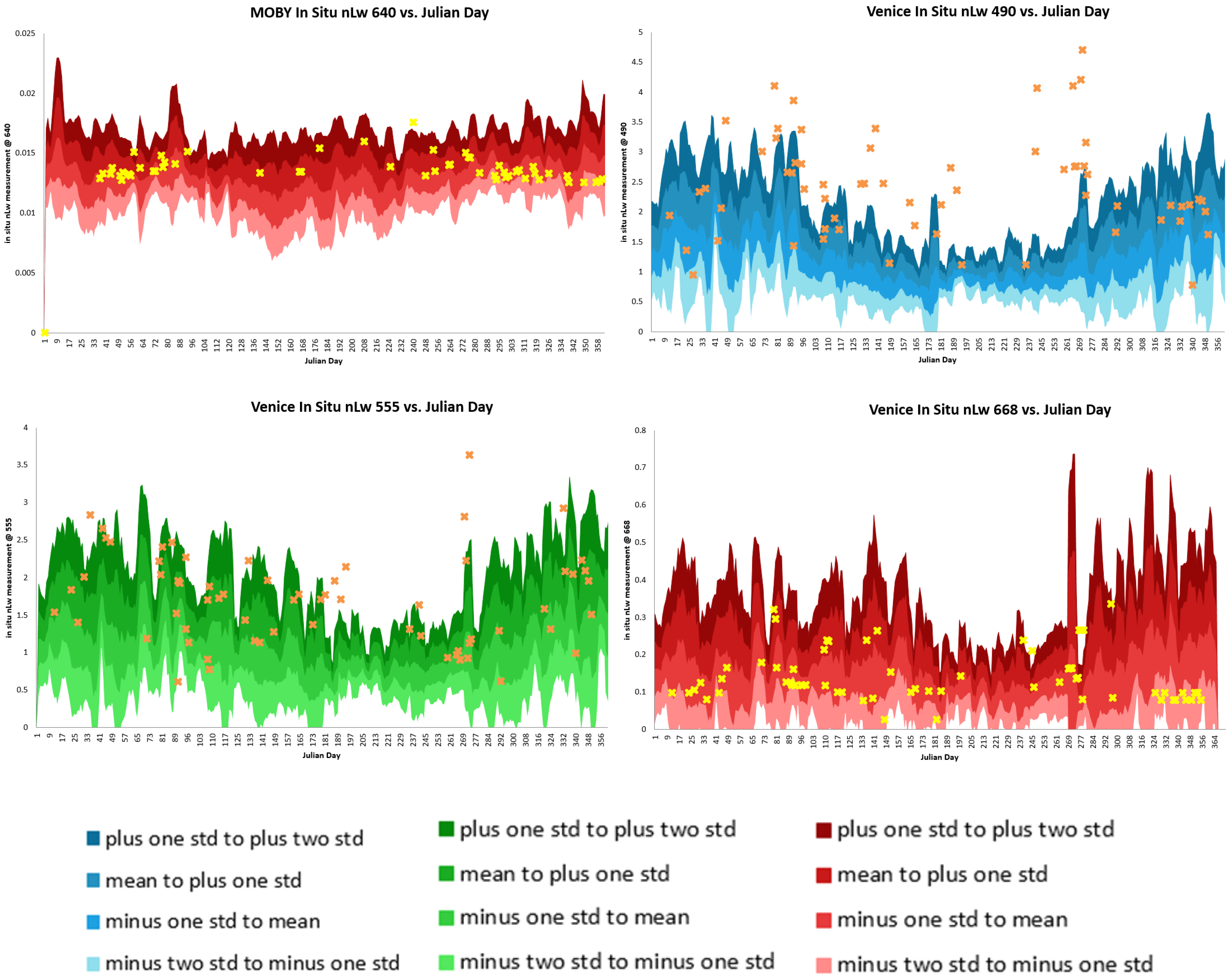
The first study area was the MOBY in situ mooring off the island of Lanai in Hawaii, which records hyperspectral nLw measurements. The second study was the AERONET-OC platform off the coast of Venice, Italy yielding multi-spectral above water nLw measurements. Throughout the remainder of this text, we refer to those two locations as MOBY and Venice. We downloaded historical radiometric and geometric corrected Level 1B SNPP VIIRS data sets from 1 January 2017 through 31 December 2019 for both study sites. We also downloaded historical PlanetScope scenes within the same time period with valid in situ nLw measurements on the same day within a 3 h time period. Level 1B (Scientific Data Records—SDR) VIIRS datasets were downloaded from NOAA’s Comprehensive Large Array-data Stewardship System (CLASS,
www.class.noaa.gov). We processed the Level 1B VIIRS datasets, composed of scientific data records (raw radiance + calibration) to Level 3 (fully calibrated, atmospherically corrected, and mapped) using the NRL’s Automated Processing System (APS). APS, which is built on the NASA SeaDAS level 1 to level 2 (l2gen) processing code, is used to ingest multi- and hyperspectral remote sensing data from continuously imaging ocean color sensors. APS produces numerous products of interest to Navy operations, some of which can be used as inputs to bio-optical forecasting models [
33]. All VIIRS datasets were processed using the standard Gordon–Wang atmospheric correction routines (
Figure 1), utilizing multi-scattering and iterative NIR correction [
34].
We used VIIRS historical L1B images at the two study sites to train our atmospheric correction models to predict nLw at the blue, green, and red wavelengths. To begin this process, we extracted Lt, Lr, and nLw from the VIIRS visible bands at cloud and glint-free box domains around the MOBY and AERONET-OC Venice in situ locations (
Figure 2). The satellite data were constrained by default to exclude any pixels that had the following quality flags: cloud contamination, high top of atmosphere radiance, land, glint, and atmospheric correction failure. Once the processing algorithms determined if one of these conditions existed, a bad data value was set for that pixel, and no nLw or other derived products were made available. In addition, high satellite angles were excluded. The solar zenith flag was set for pixels above 75 degrees, while the sensor zenith was set for above 60 degrees. The cloud albedo was the default value used for VIIRS processing (0.027) [
35,
36]. Despite the quality control process, some pixels around cloud edges or haze were still processed, resulting in errors. Additional filtering methods were required and are discussed within this paper.
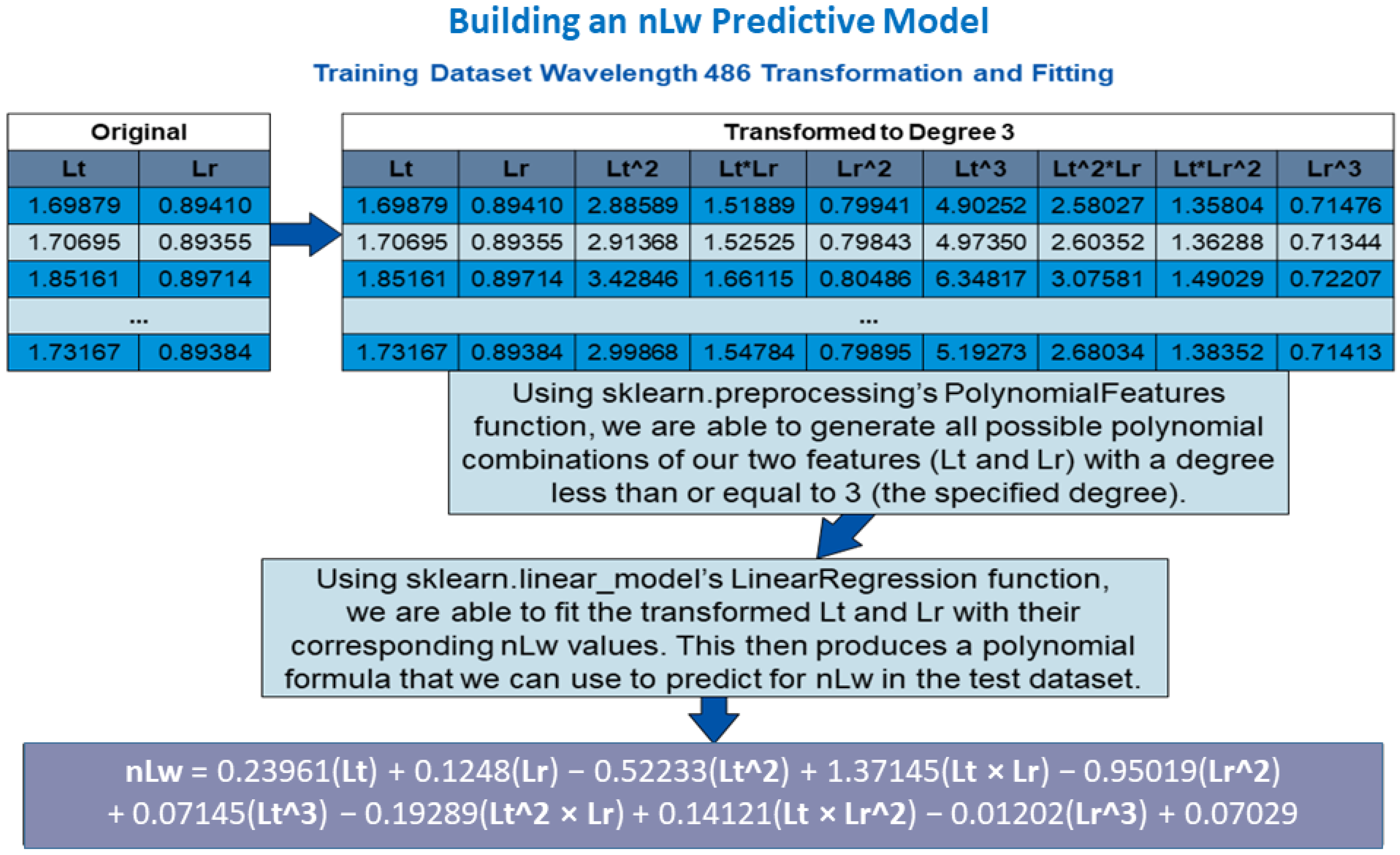
Once we processed and obtained the Lt, Lr, and nLw values used to train our models, we started developing the models for predicting nLw when only Lt and Lr are available. Our efforts focused on obtaining the most correlated answer using the multi-variate regression analysis tools available in the Python scikit-learn toolkit. Scikit-learn (
https://scikit-learn.org/stable) is an open-source machine learning library that supports a multitude of solutions that support all aspects of machine learning ranging from data processing to model selection and fitting, evaluation, and post-analysis functions. Attempts to utilize TensorFlow for this effort yielded a performance response that fared no better than scikit-learn, which came with lower overhead and general system requirements, thus leaving our team to focus on the scikit-learn API alone.
The overall methodology used was as follows: (1) data extraction and initial preparation; (2) data cleaning and versioning; (3) neural training; (4) prediction; (5) analysis and results. Each step of the process was designed to be efficient, informative (collating results into easily understood and parsed output), and repeatable. Data extraction and initial preparation focused on marshaling the data from the traditional sensor’s domain of wavelengths and performing initial quality assurance and concatenation of temporal data into a Pandas Data-frame. Data cleansing and versioning focused on applying geospatial minimum/maximum boundaries for each wavelength using the Satellite Validation Navy Tool (SAVANT) in situ data capture, as well as the removal of incomplete records, NaN’s, and similar “bad data” artifacts [
37]. With Steps 1 and 2 complete, the neural training could begin.
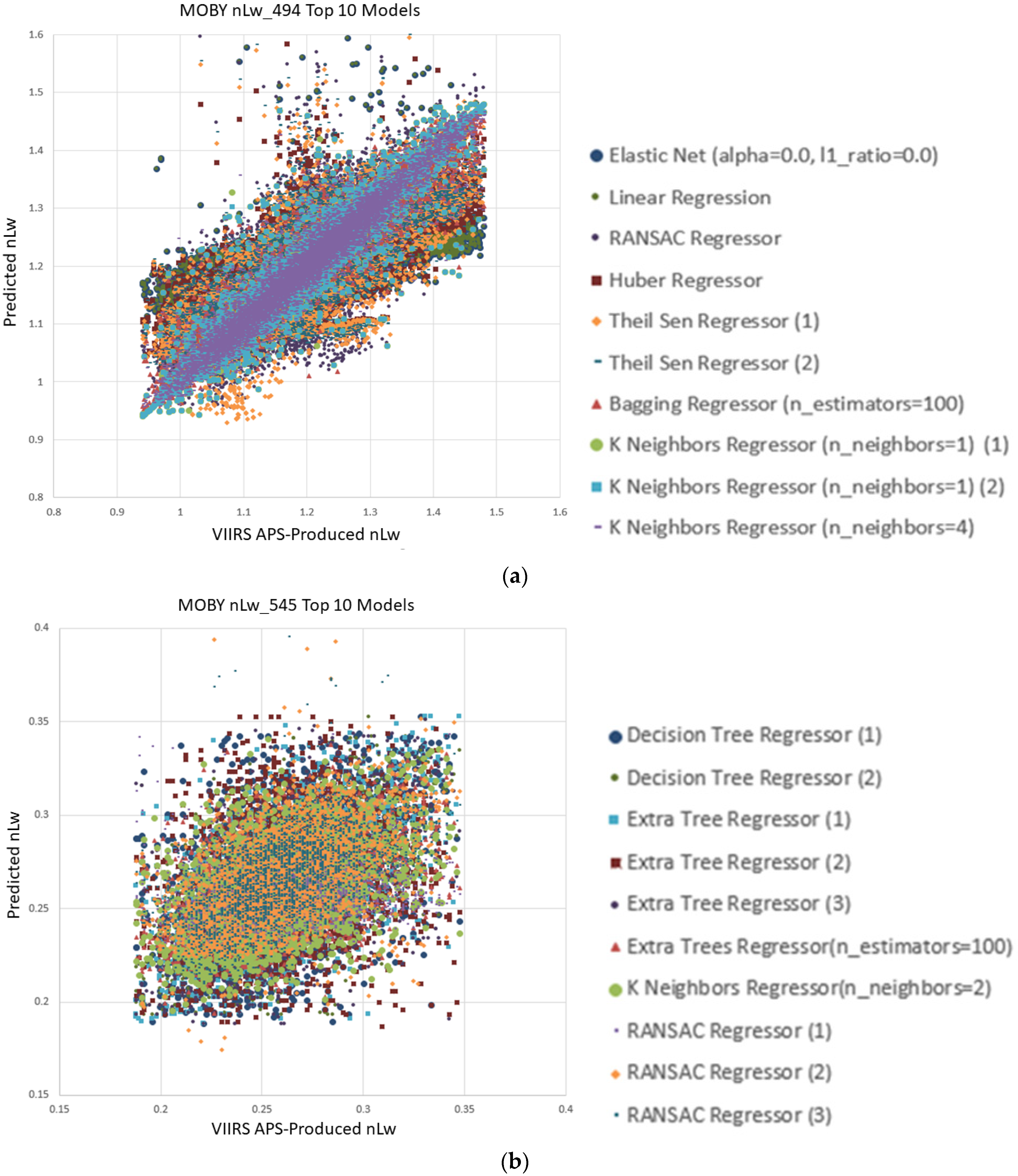
Our solution utilized linear models, support vector machines, nearest neighbors, decision trees, and ensemble methods combined with multiple perturbations of those models when available. Our dependent variable selection of nLw was supported by combinations of “Lt_ λ”, “Lr_λ”, and “(Lt_ λ—Lr_ λ)/Lt_ λ”, for each of the target wavelengths (represented as λ) matching between the PlanetScope nanosatellite domain to the more readily available and operational VIIRS sensor.
The domain of explicit models utilized in training were as follows: Lasso, Ridge, Elastic Net, Huber Regressor, Lars, Lasso Lars, Passive Aggressive Regressor, RANSAC Regressor, SGC Regressor, Theil Regressor, K Nearest Neighbors Regressor, Decision Tree Regressor, Extra Tree Regressor, SVR, SVMR, Ada Boot Regressor, Bagging Regressor, Random Forest Regressor, and Gradient Boosting Regressor.
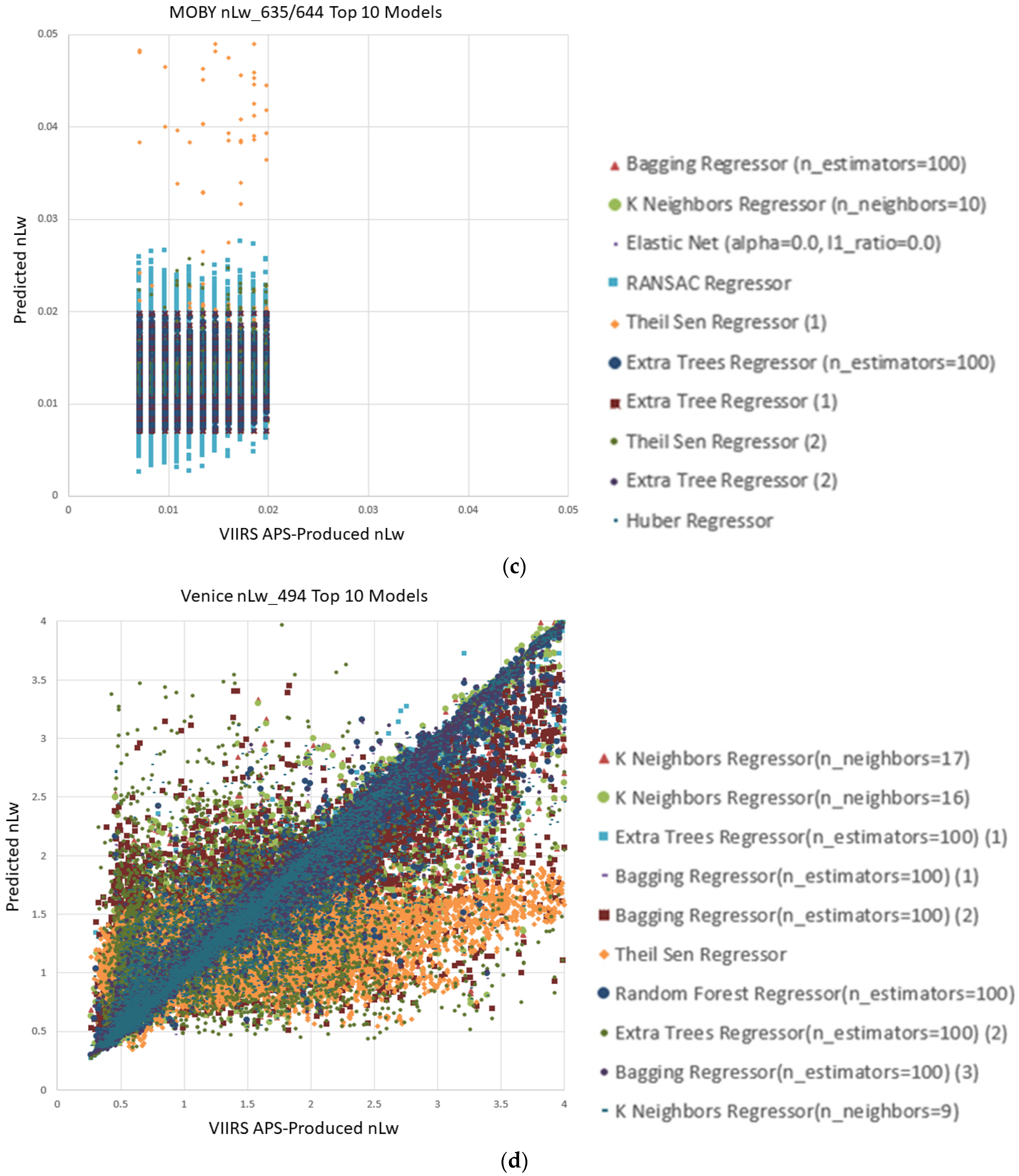
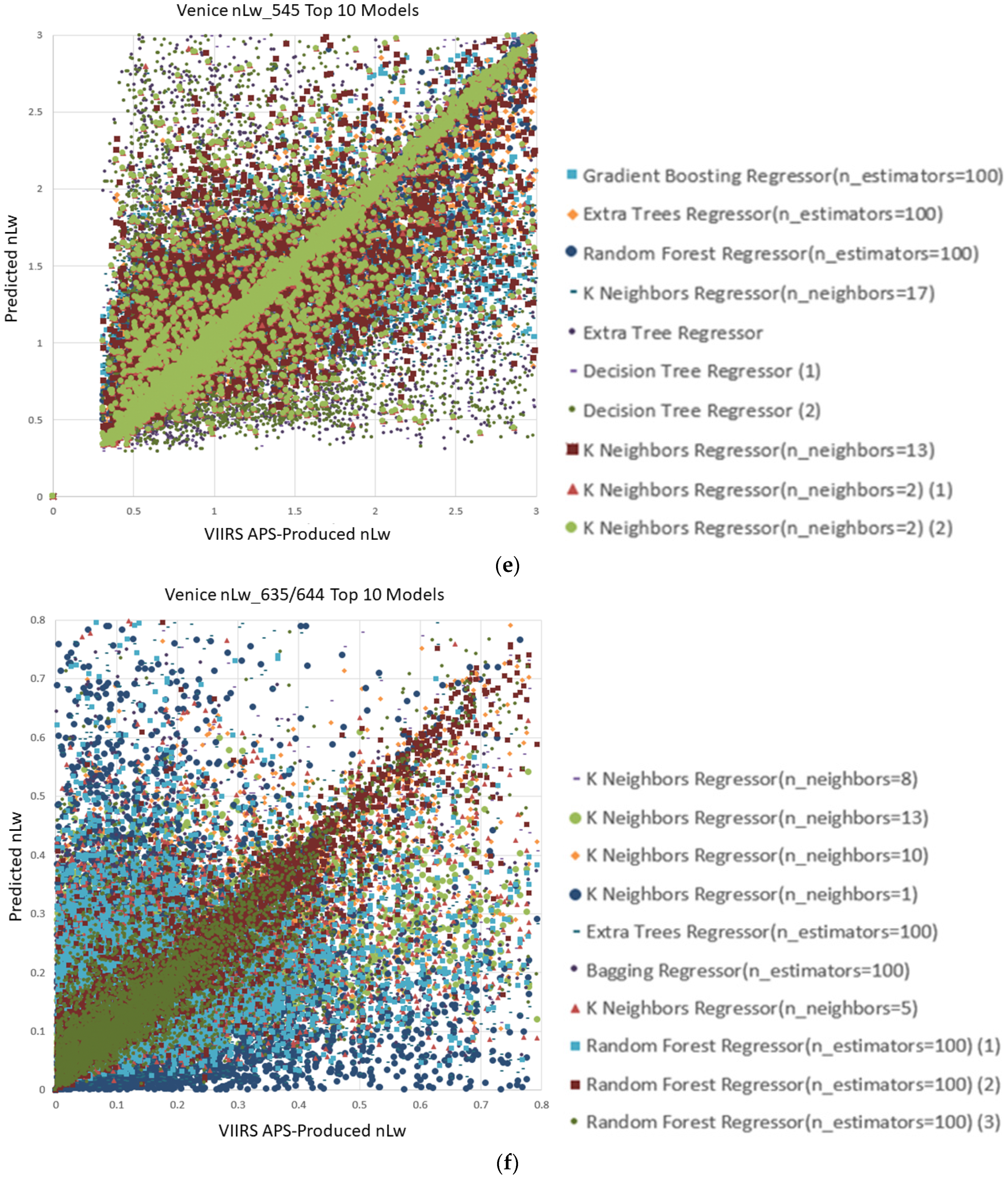
Training was performed using an 80/20 train/test split using k-fold cross validation on five splits. The total effort resulted in 188 combinations of the aforementioned models for a total of 4701 total potential neural layers evaluated. This approach allowed for two desired outcomes: (1) each wavelength could potentially have a unique set of data that would not yield the most optimal result given single-use model approaches; (2) by selecting the top-performing models, further refinements to the prediction could be achieved by combining models into a more robust ensemble. This methodology afforded the team the most flexible approach towards potential end-user solutions; however, models were not combined during this analysis. The resulting neural layers selected per region per wavelength were then loaded and applied to the Planet nanosatellite datasets. A NetCDF of original and predicted values was then created for each model, region, and wavelength in question.
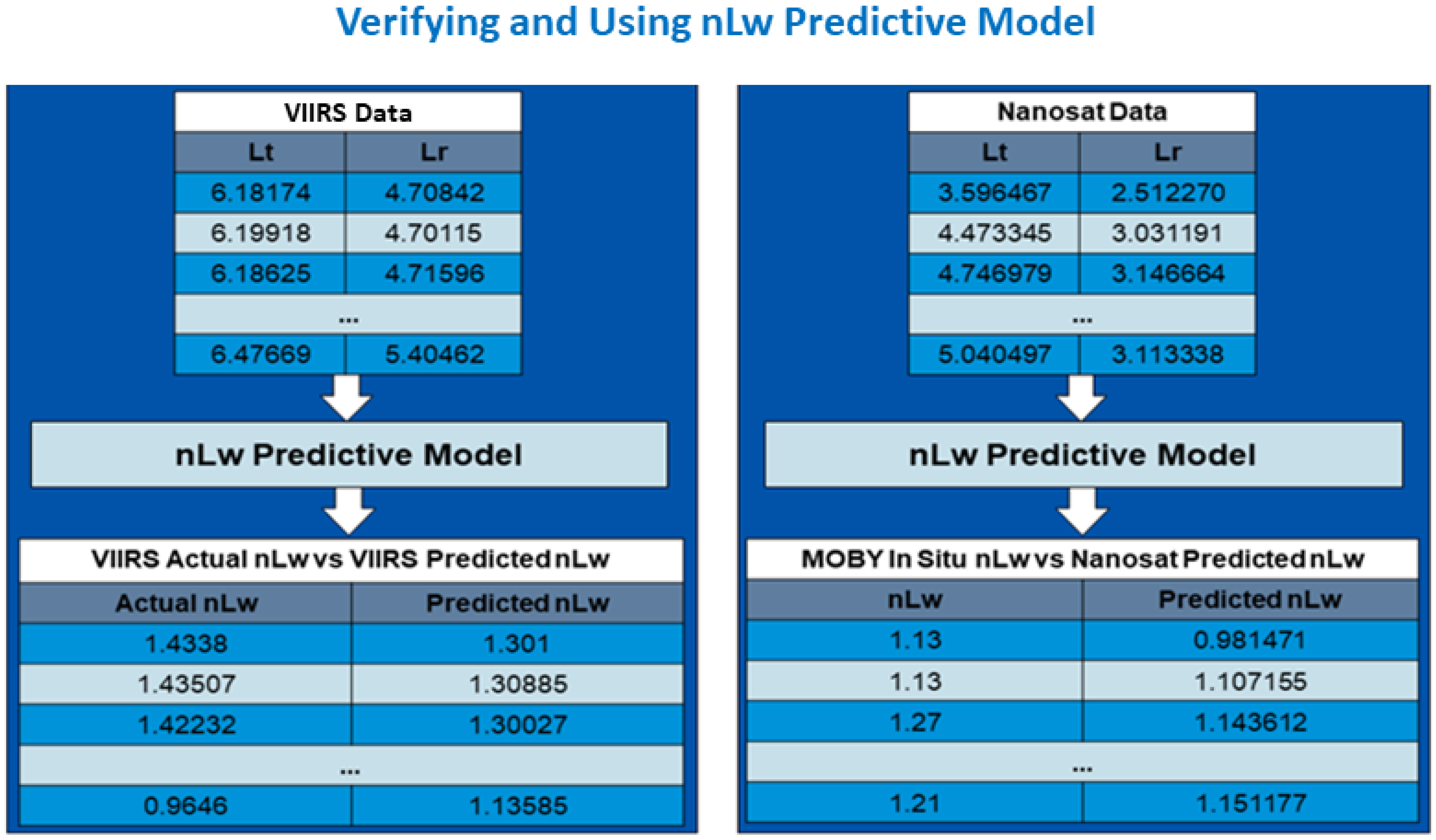
Once the models were established for each visible band to predict nLw for each visible band, our next step was to verify the accuracy of our nLw predictive model by applying it to the 20% of the dataset that was withheld from training. Once we ensured model accuracy of our nLw predictions for VIIRS by comparing predicted VIIRS nLw values to “actual” APS atmospherically corrected nLw values (using the Gordon–Wang standard), we applied our model to the nanosatellite datasets and compared those results to the MOBY and AERONET-OC in situ nLw measurements.
Figure 3 depicts an example of a linear regression model created during this study.
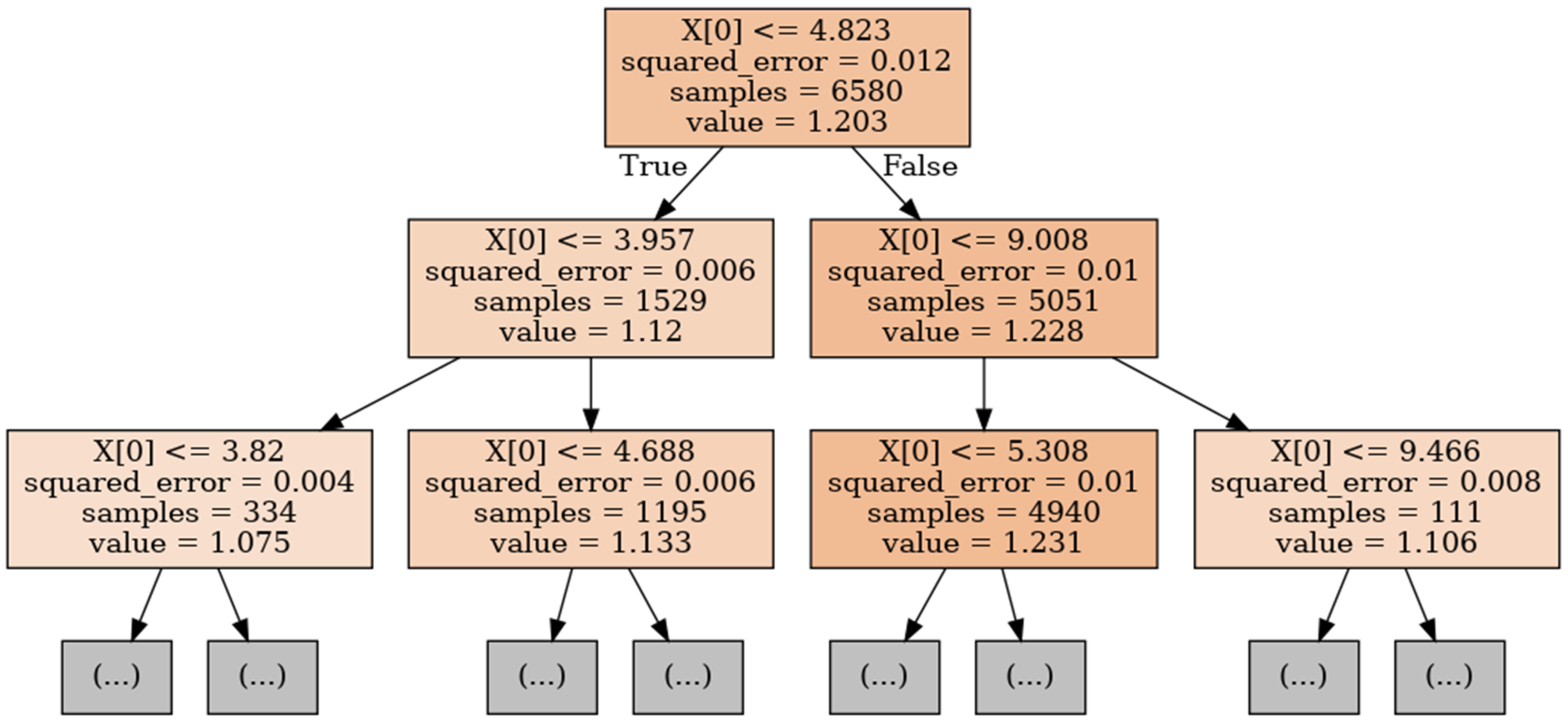
Decision trees are a popular supervised learning method for a variety of reasons. Benefits of decision trees include that they can be used for both regression and classification, they do not require feature scaling, and they are relatively easy to interpret through visualization. The goal is to create a model that predicts the value of a target variable by learning simple decision rules inferred from the data features. A tree can be seen as a piecewise constant approximation. This type of non-parametric supervised algorithm utilizes a binary tree graph to assign a target value for each data sample.
The target values are presented in the tree leaves. To reach the leaf, the sample is propagated through nodes, starting at the root node. In each node a decision is made as to which descendant node it should go. A decision is made based on the selected sample’s features. Decision tree learning is a process of finding the optimal rules in each internal tree node according to the selected metric. In a DecisionTreeRegressor as designed in the scikit-learn API, the value shown in a visual depiction of a subject tree is the value that the tree would predict for a new example falling in that node. If the criterion is mean standard error (MSE), the value is an average measure of the samples in that node. Samples represent the number of sample data points that are used for each leaf of the tree in the decision-making progress.
Figure 4 is an example schematic of a decision tree model created during this study.
4. Discussion
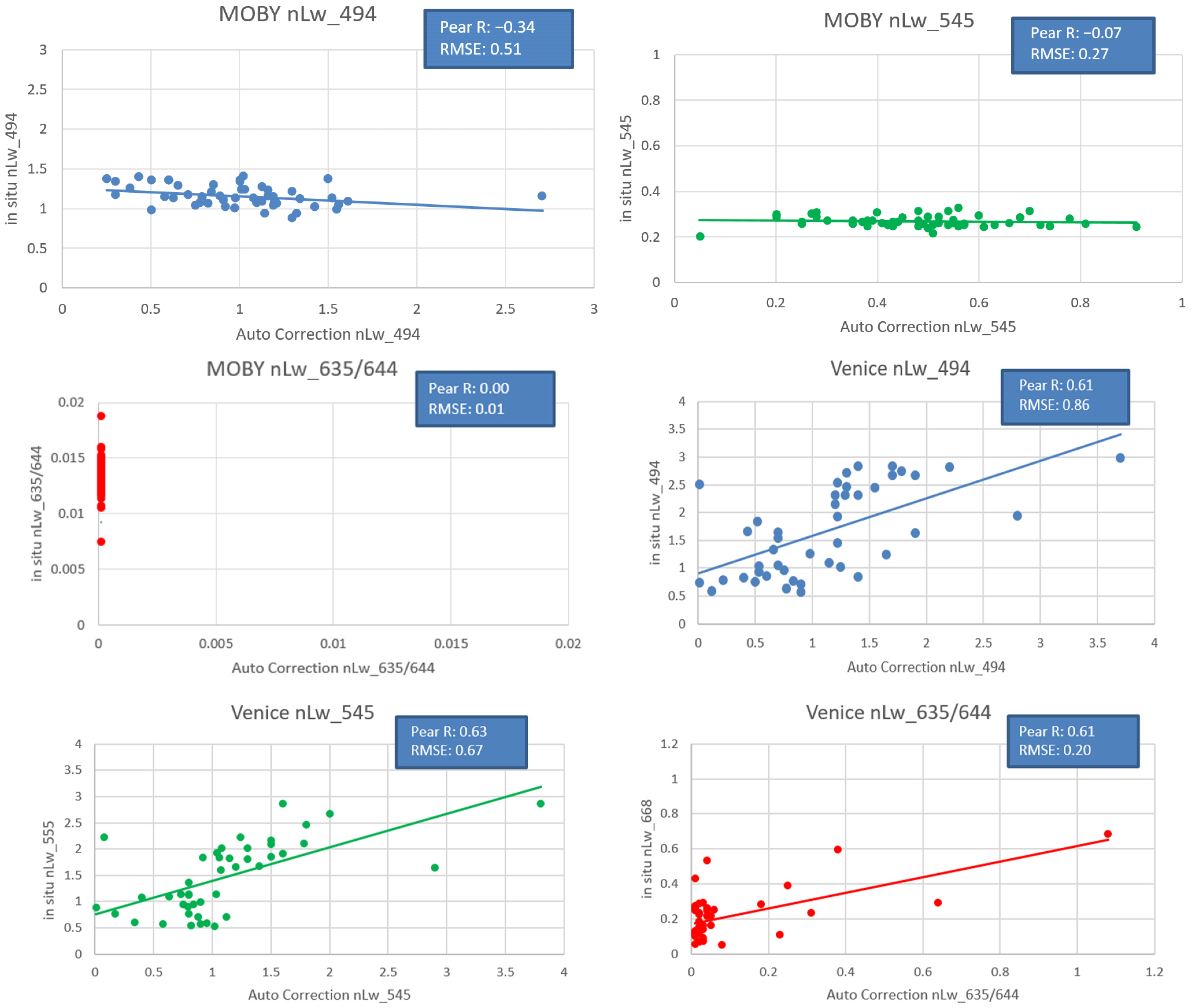
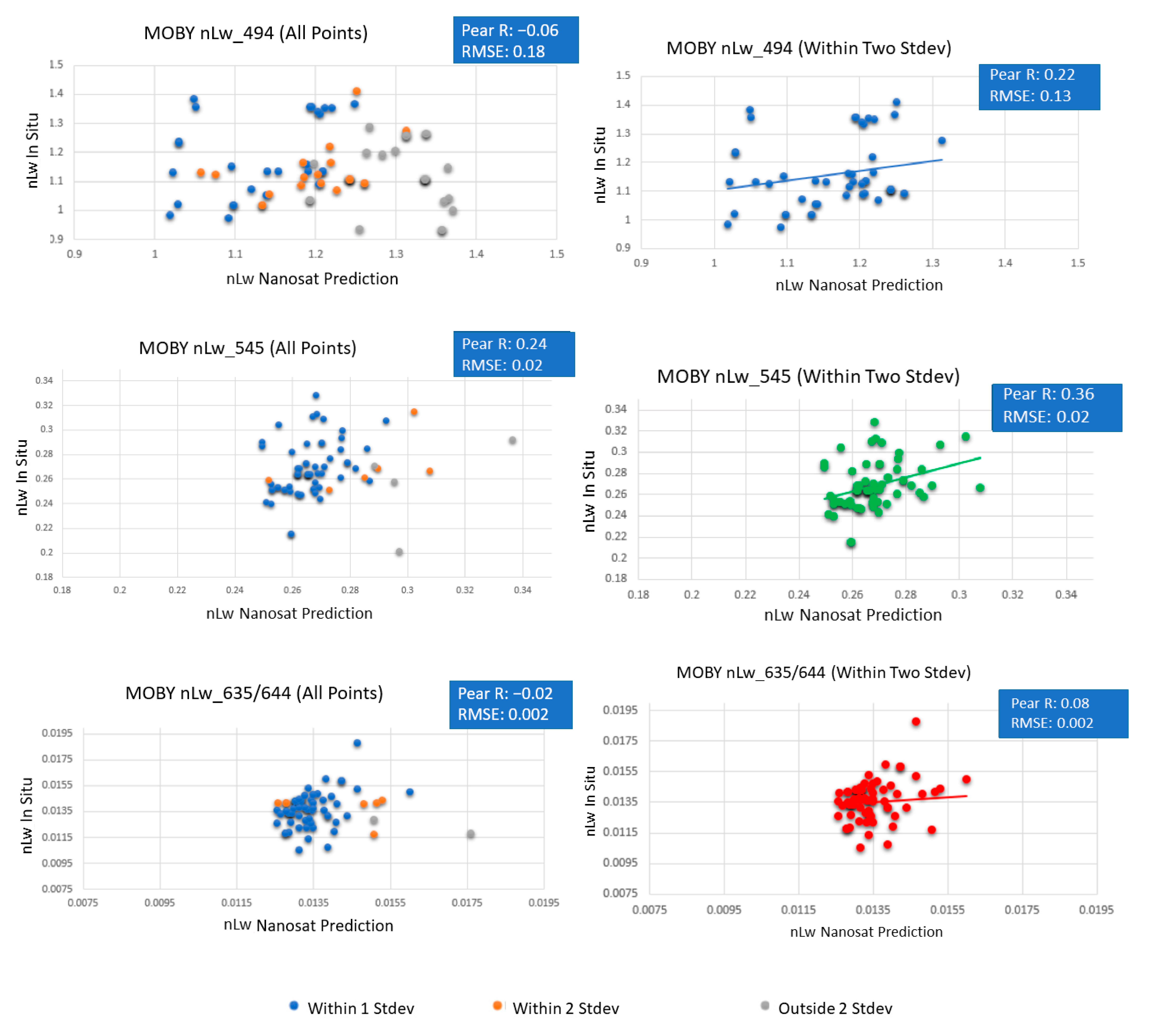
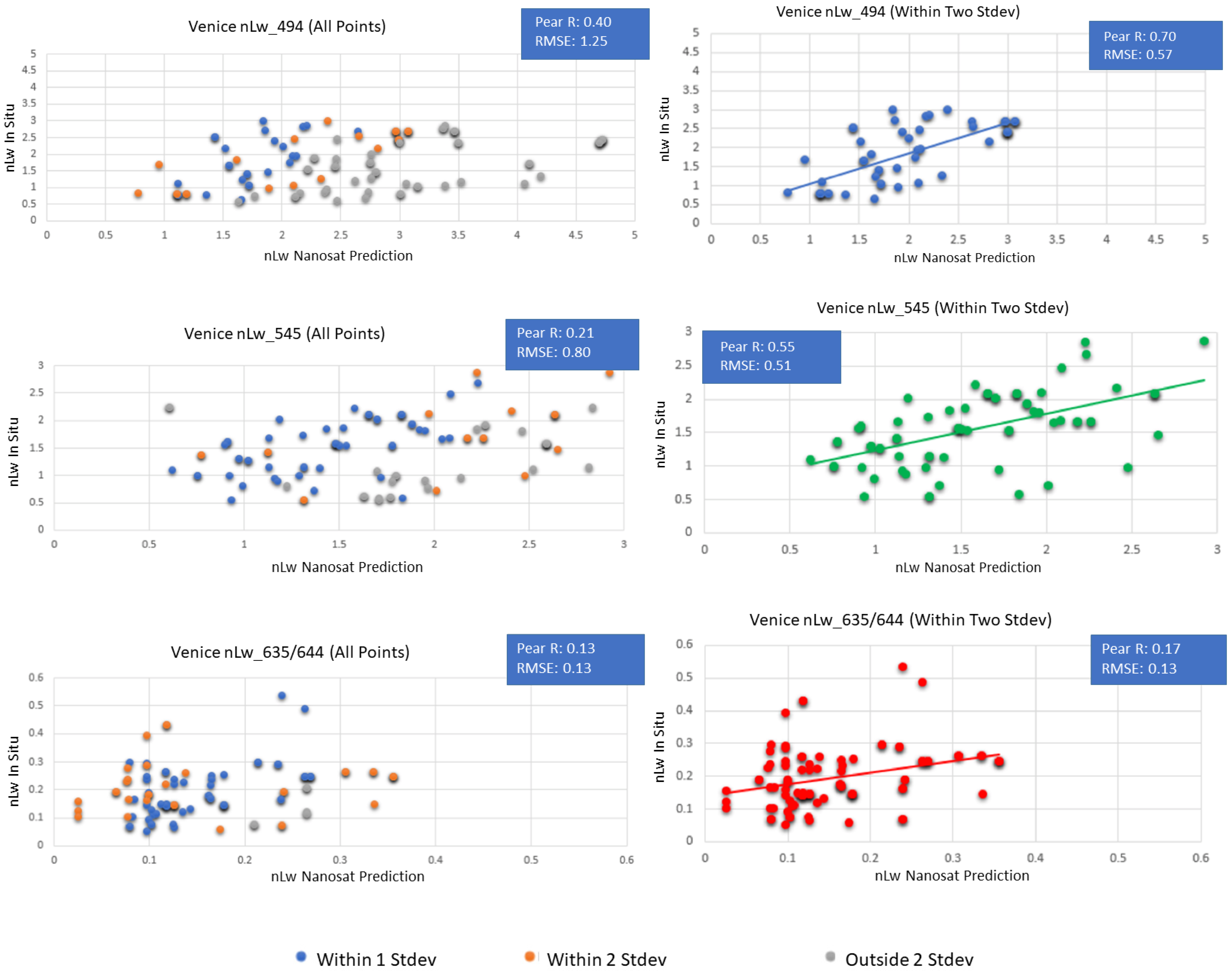
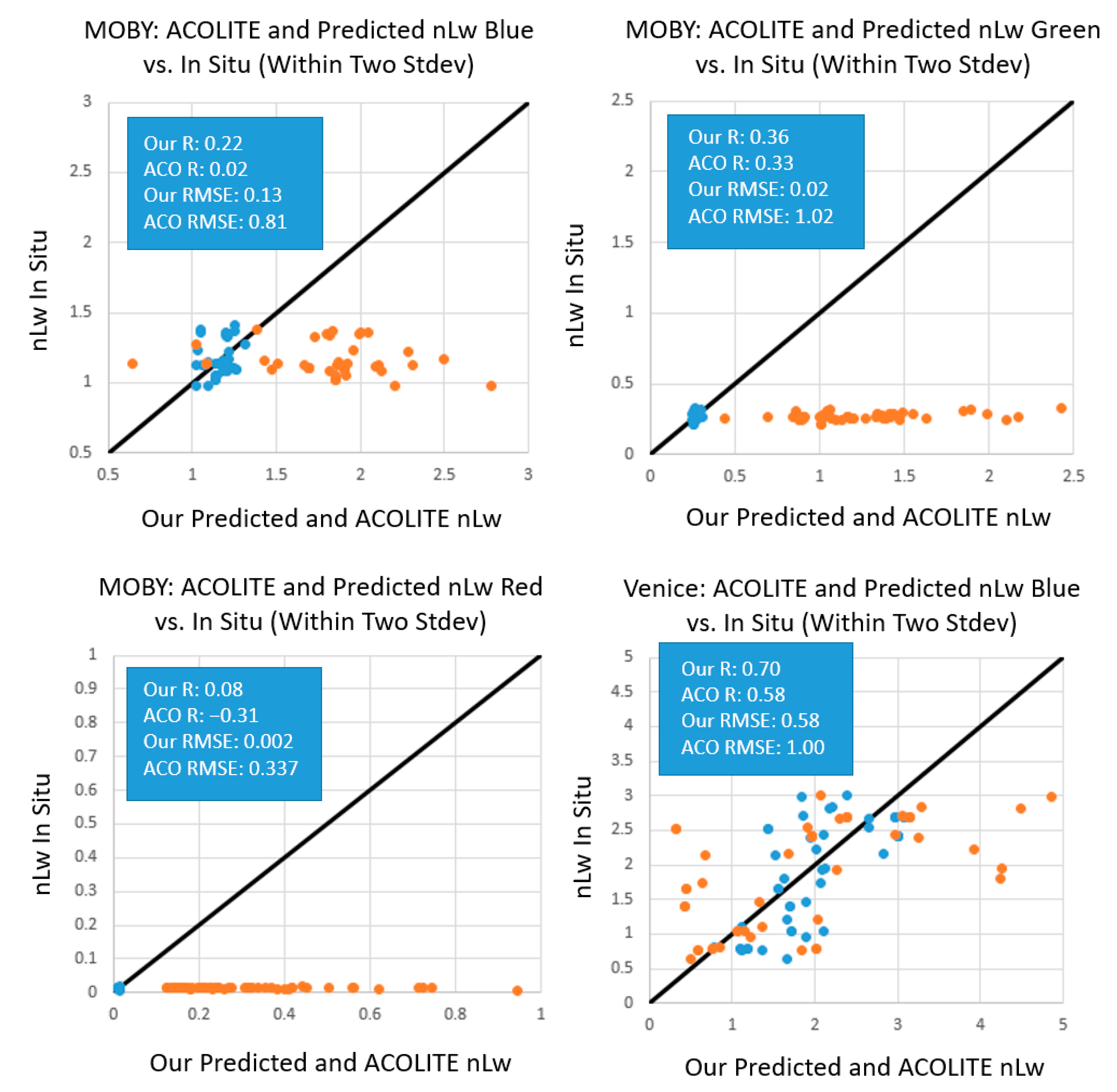
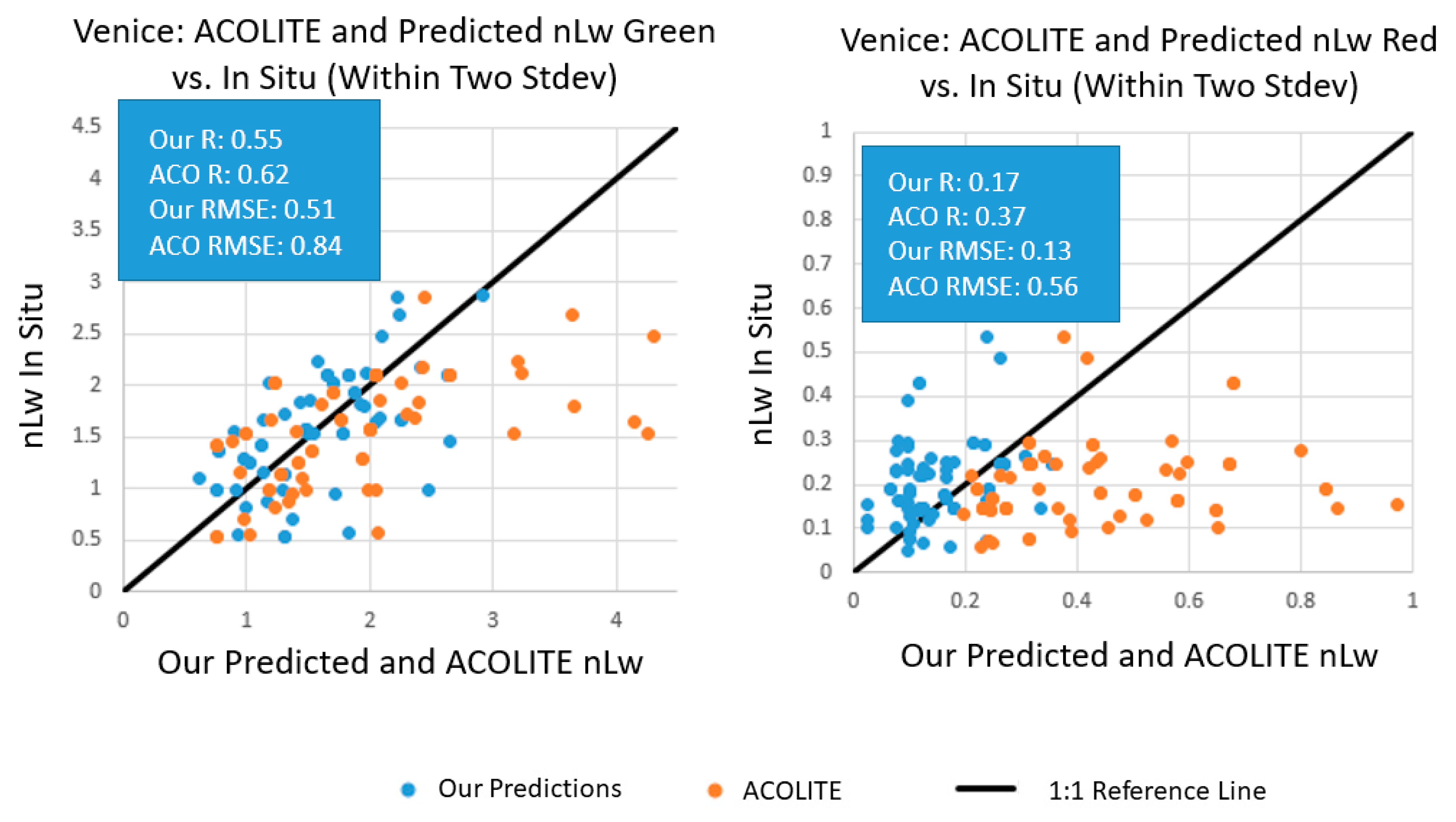
Here we performed two methods for automating atmospheric correction on data obtained from Planet’s nanosatellites, which do not possess wavelength combinations required for the standard Gordon and Wang atmospheric correction process. Aside from the DSF method used by ACOLITE and using the red band in combination with the NIR band, no accurate method for automated atmospheric correction of these types of satellite sources currently exists. The best choice for our first training/testing location was the area covering MOBY, a buoy that collects hyperspectral in situ nLw measurements. We developed ML-based atmospheric correction models from VIIRS coincident climatological datasets to predict nLw when only Lt and Lr were available. We observed encouraging results, therefore demonstrating that models can be developed from coincident ocean color satellite imagery and be used to atmospherically correct these unconventional satellite sources. This approach was conducted in open ocean waters as well as a more turbid, coastal domain that exhibits faster-changing biology. For the open-ocean observations (MOBY), our approach was shown to improve correlation and RMSE for all wavelengths compared to ACOLITE and using the red/NIR combination for automated atmospheric correction. For the coastal observations (Venice), our approach was shown to improve RMSE for all wavelengths, but our approach had a stronger correlation in only one of the three wavelengths (blue).
Factors not included in this study will be included in future efforts to improve accuracy in training the models to atmospherically correct nanosatellite images. Satellite and solar angles were not accounted for within this study. For example, the VIIRS satellite angles were not as close to nadir as the nanosatellites, which had an impact on Lt and Lr, and subsequently, nLw. Signal-to-noise Ratio (SNR) is also a concern. Planet’s nanosatellites no longer publish the SNR for their nanosatellites, but it is very likely smaller than that of a sensor such as VIIRS. This can lead to uncertainties, especially in the red signal at a domain such as MOBY, where most, if not all, of Lt is noise. Additionally, Planet nanosatellites’ broader wavelengths produce an extra layer of uncertainties within a single wavelength’s Lt. Another factor to consider is how sun glint contamination can require additional filtering methods (beyond what is performed for more coarse spatial resolution sensors) due to Planet’s nanosatellites’ high spatial resolution
Since this project focuses on using data from the 150+ PlanetScope nanosatellites, vicarious calibration of these individual sensors will be a priority moving forward to improve spectral shape and reduce uncertainty between the satellite-derived and in situ nLw values. Even though PlanetScope’s nanosatellites are well calibrated prior to launch, most Earth-orbiting sensors require on-orbit calibration adjustments due to sensor drift and/or degradation, and it will be necessary to apply our own vicarious calibration routines. Traditionally, earth-observing and orbiting sensors are vicariously calibrated using in situ data from sensors such as MOBY and the AERONET-OC. The vicarious calibration process adjusts the prelaunch laboratory calibration to improve the accuracy of the actual in-orbit measurement of the water leaving radiances. During this process, the vicariously calibrated gain set is multiplied by an individual sensor’s spectral Lt values so that the derived spectral nLw values are more accurate.
In summary, ML-based approaches were tested using a calibrated and dedicated ocean color sensor to develop models that derive nLw from Lr and Lt input variables. We observed potential in using this methodology as a means to automatically atmospherically correct ocean color satellite sources that do not possess the wavelengths required by existing, traditional methodologies.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}