


Stabilizing and Destabilizing Breaching Flow Slides

Abstract
:1. Introduction
2. Existing Method for Failure Mode Assessment
3. Laboratory Experiments
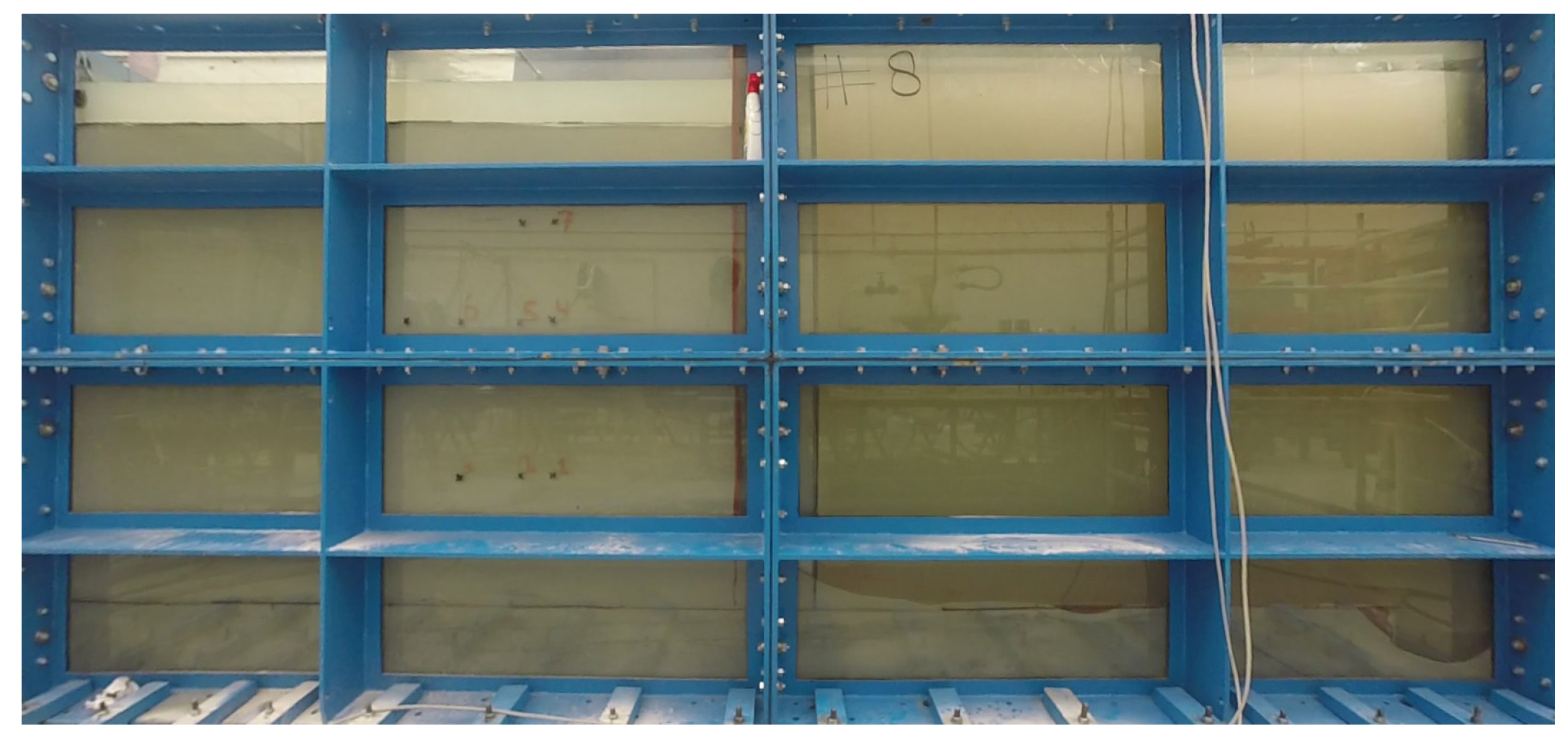
3.1. Experimental Setup
3.2. Characterization of Sands

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (m) | (m) | (-) | () | |
|---|---|---|---|---|
| GEBA | 120 | 80 | 0.415 | 35.8 |
| D9 | 330 | 225 | 0.430 | 40.1 |
3.3. Test Procedure
- The false floor is placed at the bottom of the breaching tank.
- The breaching tank is filled with clean water.
- The removable gate is lowered down until it reaches the bottom of the breaching tank.
- A layer of sand is placed into the breaching tank and compacted by a vibrator needle.
- The previous step is repeated until reaching the target breach height, , which was up to m.
- For some experimental runs, a slope at the crest of the breach face is formed. The angle of this slope, , was up to 30.
- The pumps are switched on and then the gate is automatically removed, which takes about 10–17 s depending on the initial breach height.
3.4. Data Analysis
4. Experimental Results
4.1. General Description of the Deposit Failure
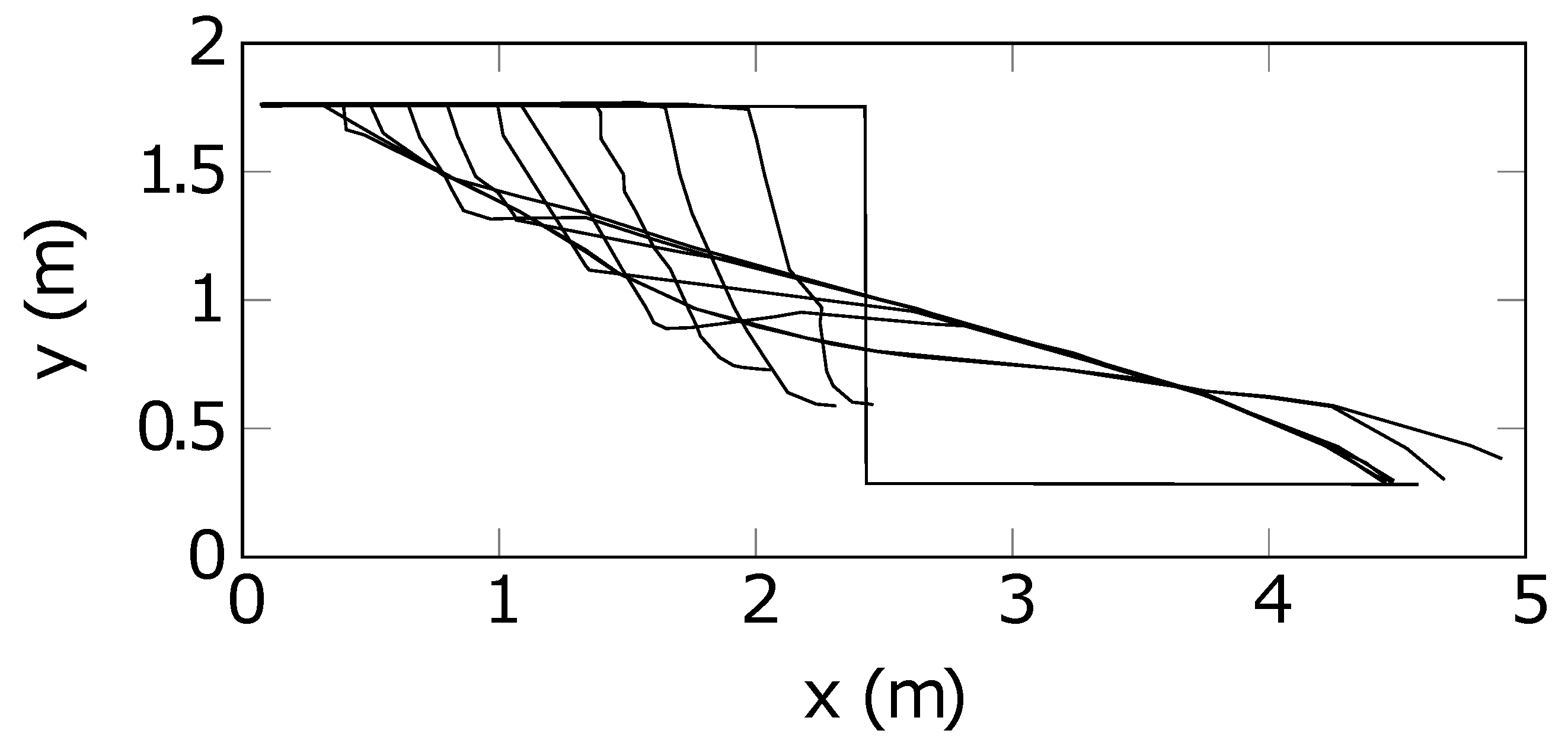
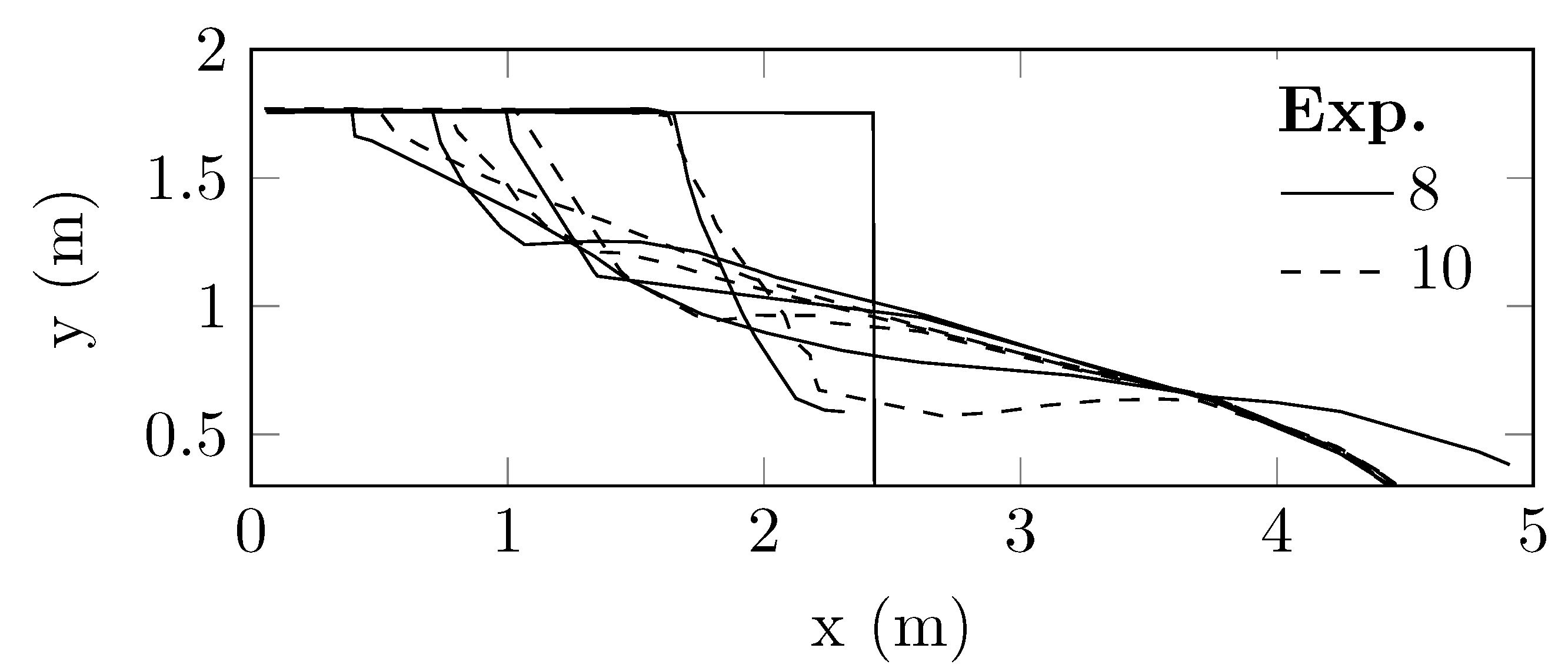
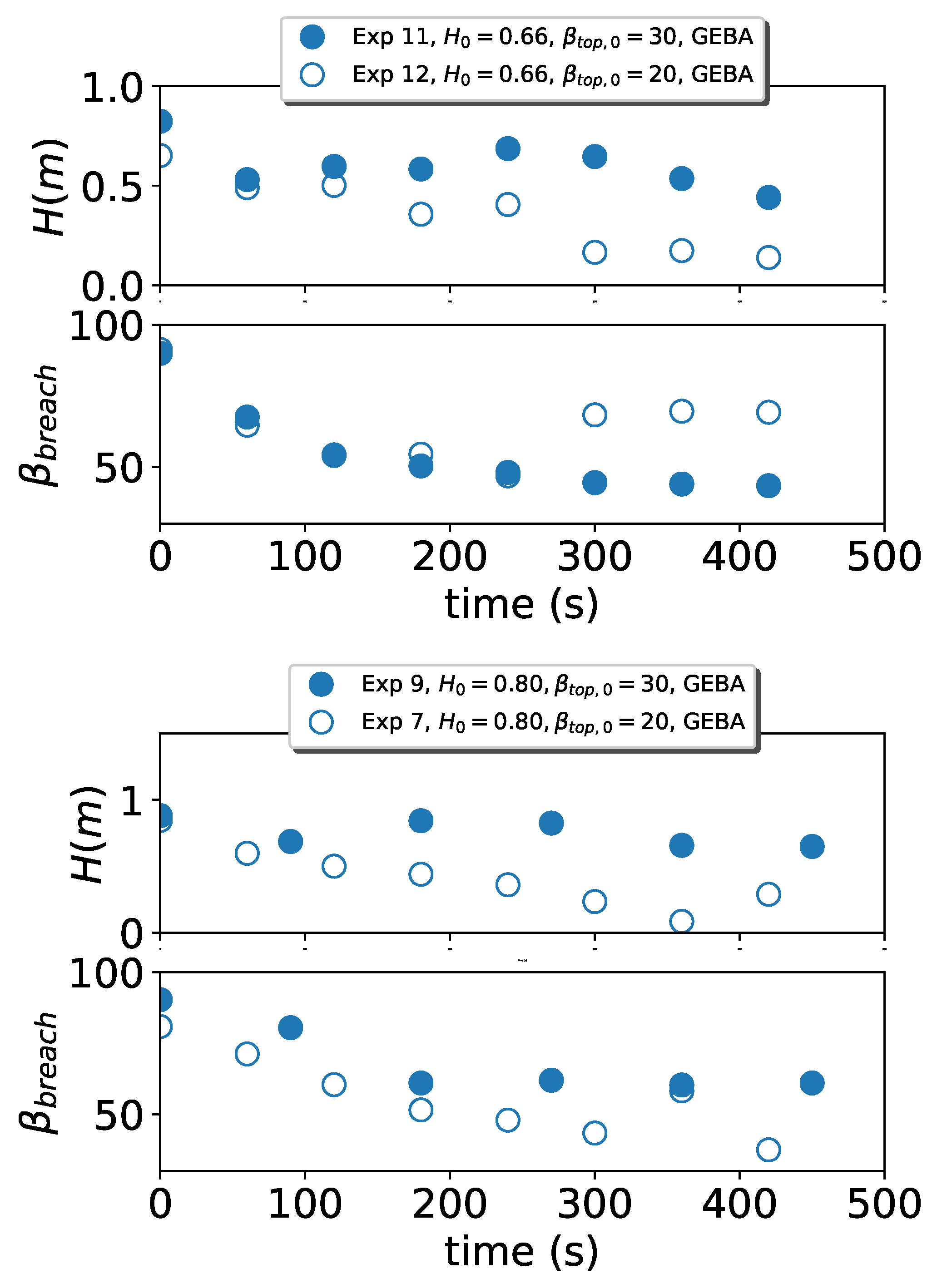
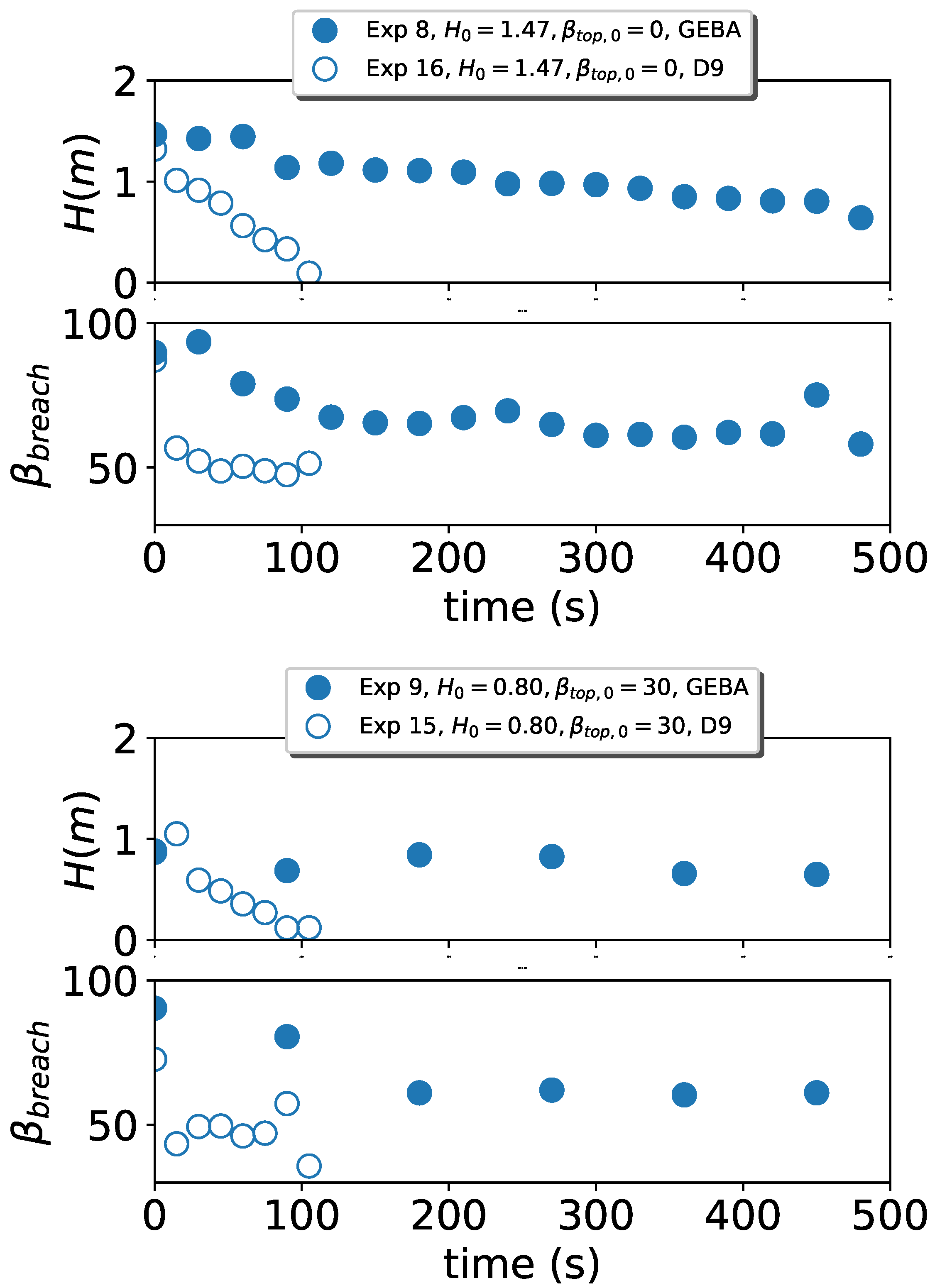
4.2. Temporal Evolution of Breaching
5. Validity Investigation of Existing Assessment Method
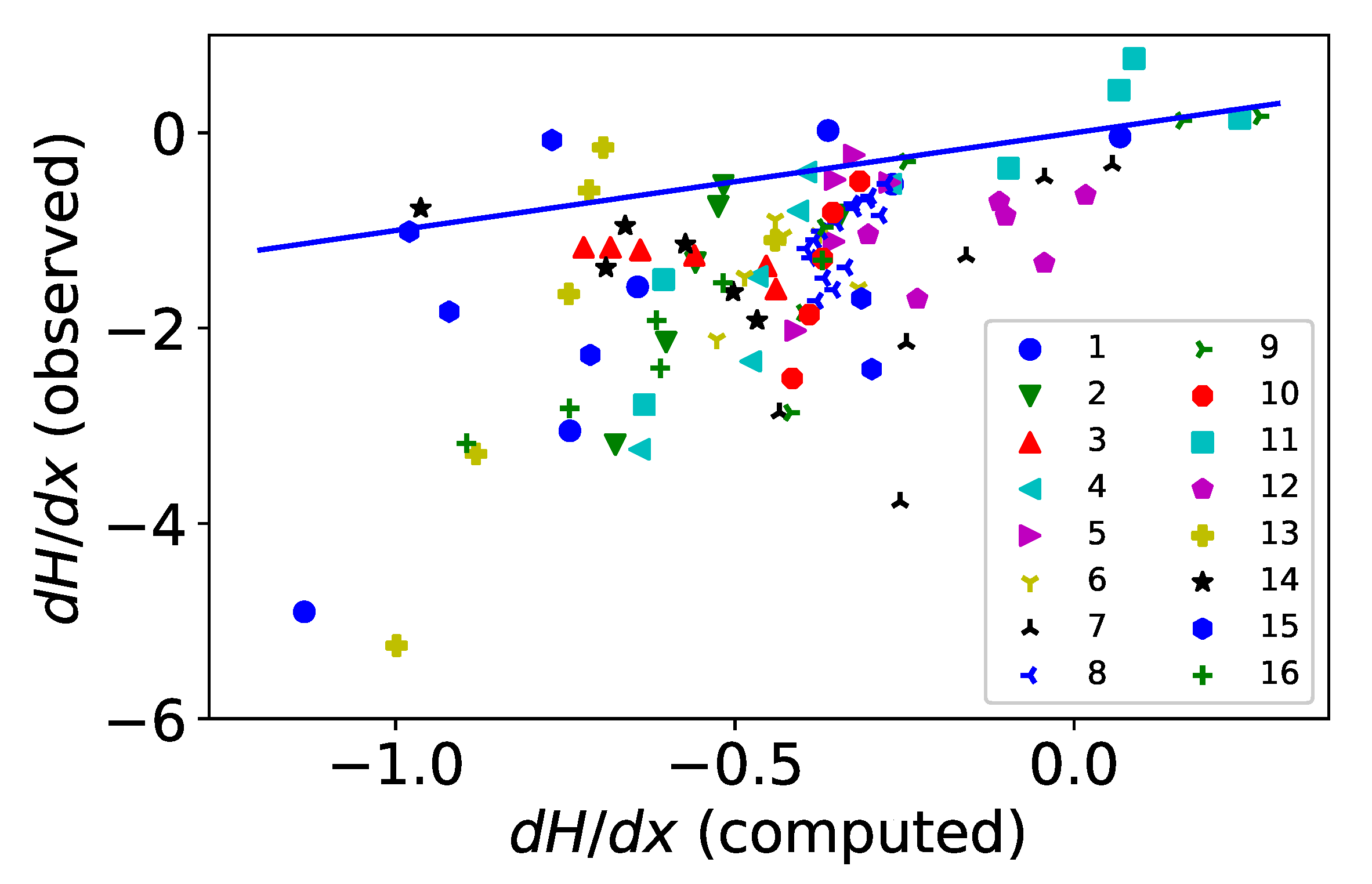
5.1. Comparison of Results
5.2. Outlook
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alhaddad, S.; Labeur, R.J.; Uijttewaal, W. Breaching Flow Slides and the Associated Turbidity Current. J. Mar. Sci. Eng. 2020, 8, 67. [Google Scholar] [CrossRef] [Green Version]
- Alhaddad, S.; Labeur, R.J.; Uijttewaal, W. The need for experimental studies on breaching flow slides. In Proceedings of the Second International Conference on the Material Point Method for Modelling Soil-Water-Structure Interaction, Cambridge, UK, 8–10 January 2019; pp. 166–172. [Google Scholar]
- Van Rhee, C.; Bezuijen, A. The breaching of sand investigated in large-scale model tests. In Proceedings of the 26th International Conference on Coastal Engineering, Copenhagen, Denmark, 22–26 June 1998; pp. 2509–2519. [Google Scholar]
- Mastbergen, D.R.; Van Den Berg, J.H. Breaching in fine sands and the generation of sustained turbidity currents in submarine canyons. Sedimentology 2003, 50, 625–637. [Google Scholar] [CrossRef]
- Alhaddad, S.; Labeur, R.J.; Uijttewaal, W. Large-scale Experiments on Breaching Flow Slides and the Associated Turbidity Current. J. Geophys. Res. Earth Surf. 2020, 125, e2020JF005582. [Google Scholar] [CrossRef]
- Van Rhee, C. Slope failure by unstable breaching. In Proceedings of the Institution of Civil Engineers-Maritime Engineering; Thomas Telford Ltd.: London, UK, 2015; Volume 168, pp. 84–92. [Google Scholar]
- Weij, D.; Keetels, G.; Goeree, J.; Van Rhee, C. An approach to research of the breaching process. In Proceedings of the WODCON XXI, Miami, FL, USA, 13–17 June 2016; pp. 13–17. [Google Scholar]
- Alhaddad, S.; de Wit, L.; Labeur, R.J.; Uijttewaal, W. Modeling of Breaching-Generated Turbidity Currents Using Large Eddy Simulation. J. Mar. Sci. Eng. 2020, 8, 728. [Google Scholar] [CrossRef]
- Eke, E.; Viparelli, E.; Parker, G. Field-scale numerical modeling of breaching as a mechanism for generating continuous turbidity currents. Geosphere 2011, 7, 1063–1076. [Google Scholar] [CrossRef]
- You, Y.; Flemings, P.; Mohrig, D. Mechanics of dual-mode dilative failure in subaqueous sediment deposits. Earth Planet. Sci. Lett. 2014, 397, 10–18. [Google Scholar] [CrossRef]
- Mastbergen, D.R.; Beinssen, K.; Nédélec, Y. Watching the Beach Steadily Disappearing: The Evolution of Understanding of Retrogressive Breach Failures. J. Mar. Sci. Eng. 2019, 7, 368. [Google Scholar] [CrossRef] [Green Version]
- Alhaddad, S.; Labeur, R.; Uijttewaal, W. Preliminary Evaluation of Existing Breaching Erosion Models. In Proceedings of the 10th International Conference on Scour and Erosion, ISSMGE, Arlington, VA, USA, 18–20 October 2021; pp. 619–627. [Google Scholar]
- Van Rhee, C. Simulation of the breaching process—Experimental validation. In Proceedings of the 22nd World Dredging Conference, Changhai, China, 25–29 April 2019. [Google Scholar]
- Mastbergen, D.; Winterwerp, J.; Bezuijen, A. On the construction of sand fill dams. Part 1: Hydraulic aspects. In Modelling Soil-Water Structure Interaction; Kolkman, P.A., Lindenberg, J., Pilarczyk, K.W., Eds.; CRC Press: Delft, The Netherlands, 1988; pp. 353–362. [Google Scholar]
- Eke, E.; Parker, G.; Wang, R. Breaching as a mechanism for generating sustained turbidity currents. In Proceedings of the 33rd Internation Association of Hydraulic Engineering & Research Congress: Water Engineering for a Sustainable Environment; IAHR: Vancouver, BC, Canada, 2009. [Google Scholar]
- You, Y.; Flemings, P.; Mohrig, D. Dynamics of dilative slope failure. Geology 2012, 40, 663–666. [Google Scholar] [CrossRef] [Green Version]
- Montellà, E.; Chauchat, J.; Chareyre, B.; Bonamy, C.; Hsu, T. A two-fluid model for immersed granular avalanches with dilatancy effects. J. Fluid Mech. 2021, 925. [Google Scholar] [CrossRef]
- Lee, C.H.; Chen, J.Y. Multiphase simulations and experiments of subaqueous granular collapse on an inclined plane in densely packed conditions: Effects of particle size and initial concentration. Phys. Rev. Fluids 2022, 7, 044301. [Google Scholar] [CrossRef]












| Test # | (m) | () | Sand Type |
|---|---|---|---|
| 1 | 0.66 | 0 | GEBA |
| 2 | 0.66 | 0 | GEBA |
| 3 | 0.66 | 0 | GEBA |
| 4 | 1.17 | 0 | GEBA |
| 5 | 1.17 | 0 | GEBA |
| 6 | 1.17 | 0 | GEBA |
| 7 | 0.8 | 20 | GEBA |
| 8 | 1.47 | 0 | GEBA |
| 9 | 0.8 | 30 | GEBA |
| 10 | 1.47 | 0 | GEBA |
| 11 | 0.66 | 30 | GEBA |
| 12 | 0.66 | 20 | GEBA |
| 13 | 0.66 | 0 | D9 |
| 14 | 1.17 | 0 | D9 |
| 15 | 0.8 | 30 | D9 |
| 16 | 1.47 | 0 | D9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alhaddad, S.; Weij, D.; van Rhee, C.; Keetels, G. Stabilizing and Destabilizing Breaching Flow Slides. J. Mar. Sci. Eng. 2023, 11, 560. https://doi.org/10.3390/jmse11030560
Alhaddad S, Weij D, van Rhee C, Keetels G. Stabilizing and Destabilizing Breaching Flow Slides. Journal of Marine Science and Engineering. 2023; 11(3):560. https://doi.org/10.3390/jmse11030560
Chicago/Turabian StyleAlhaddad, Said, Dave Weij, Cees van Rhee, and Geert Keetels. 2023. "Stabilizing and Destabilizing Breaching Flow Slides" Journal of Marine Science and Engineering 11, no. 3: 560. https://doi.org/10.3390/jmse11030560