
Requirements for Optimal Local Route Planning of Autonomous Ships

Abstract
:1. Introduction
2. Requirements for Optimal Local Path Planning
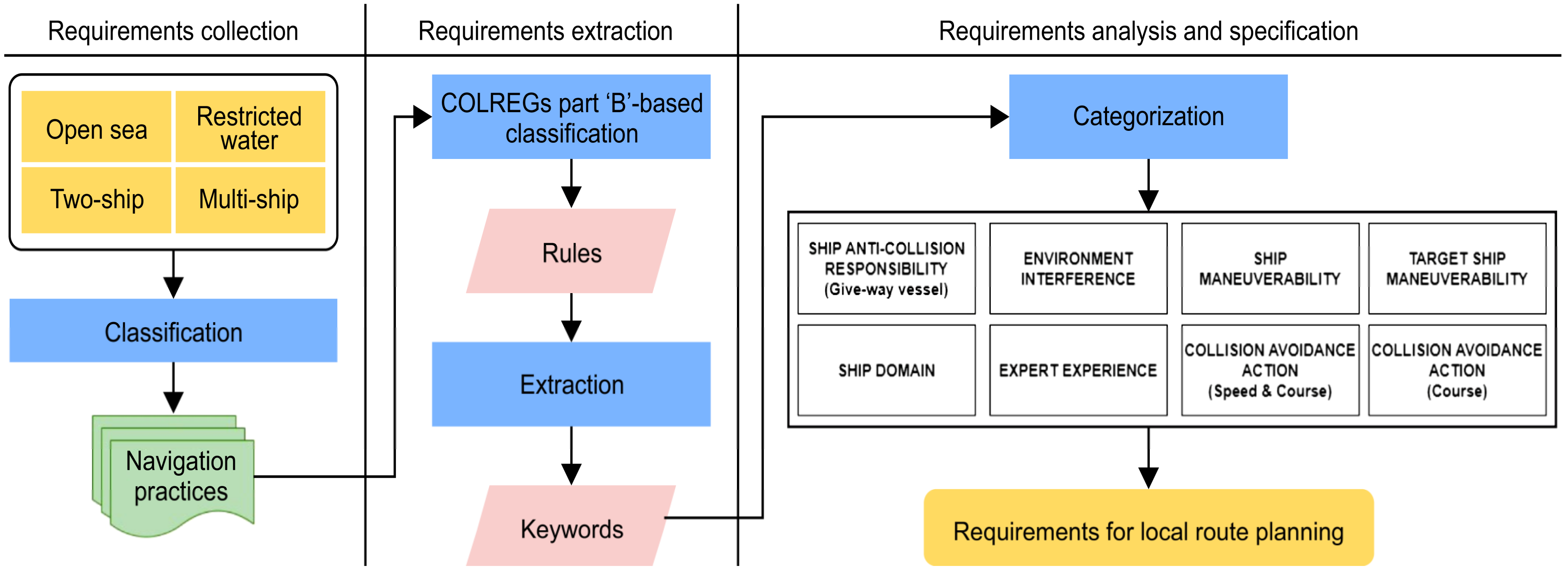
2.1. Requirements Analysis
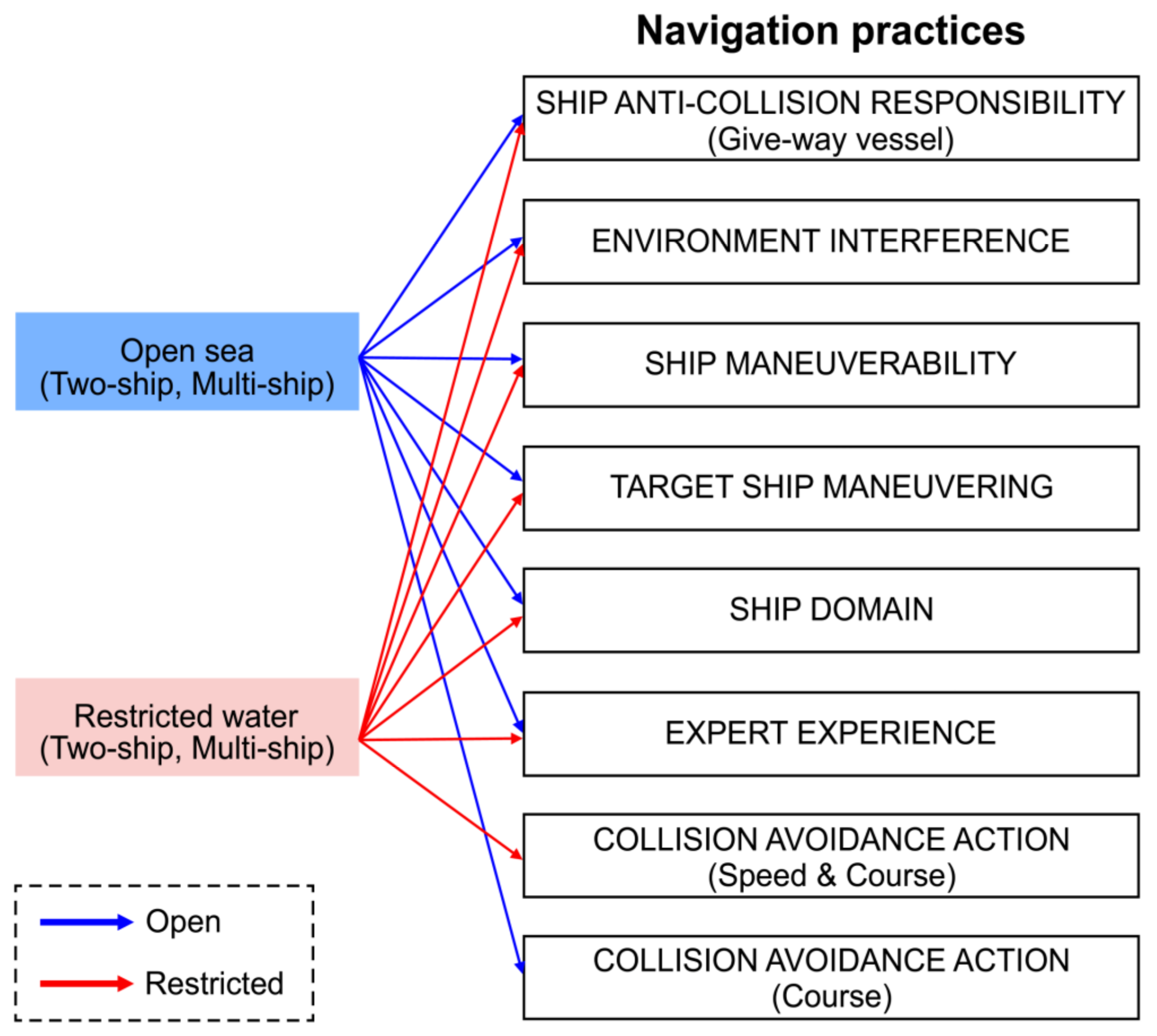
2.2. Requirements Collection
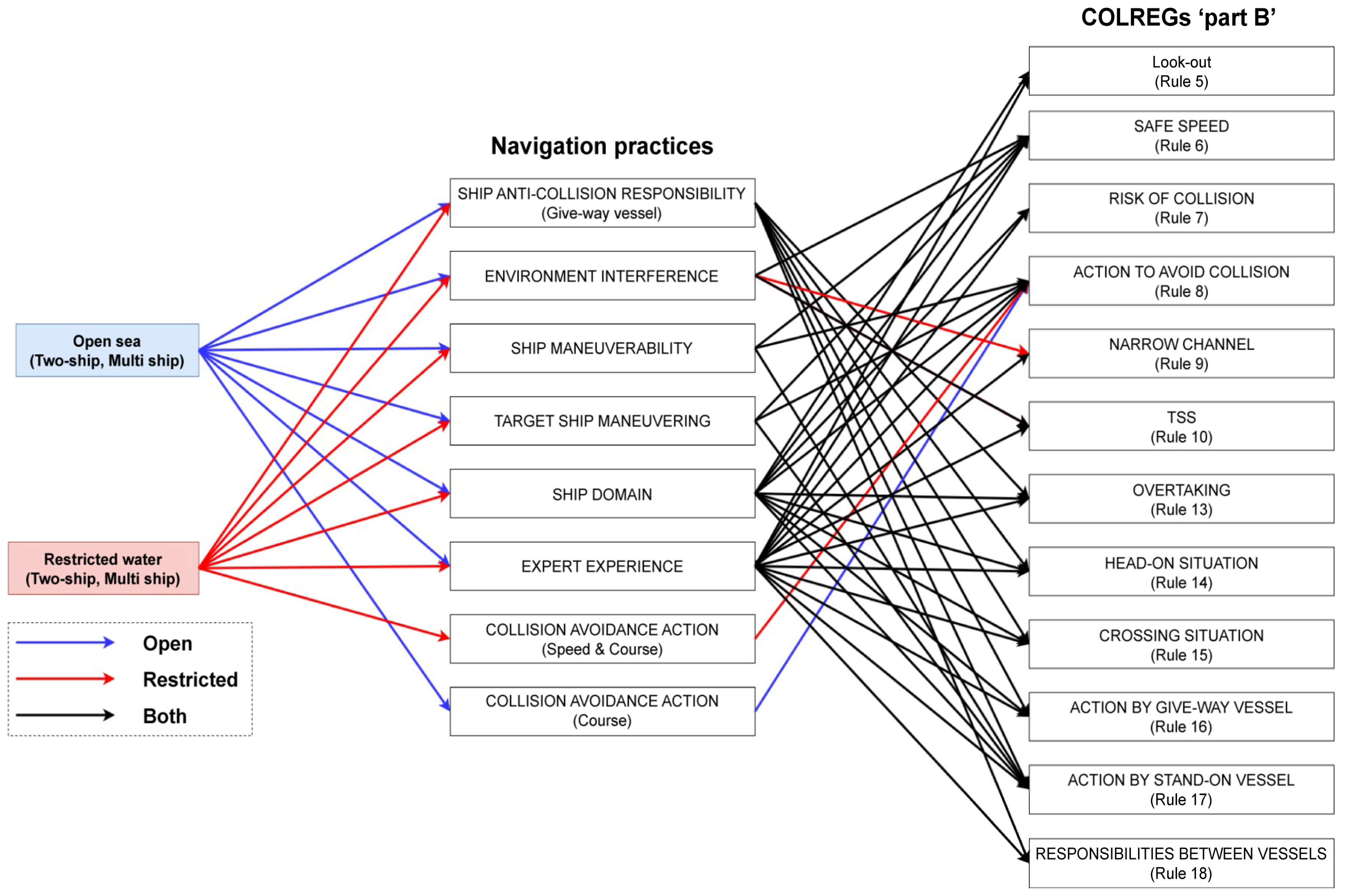
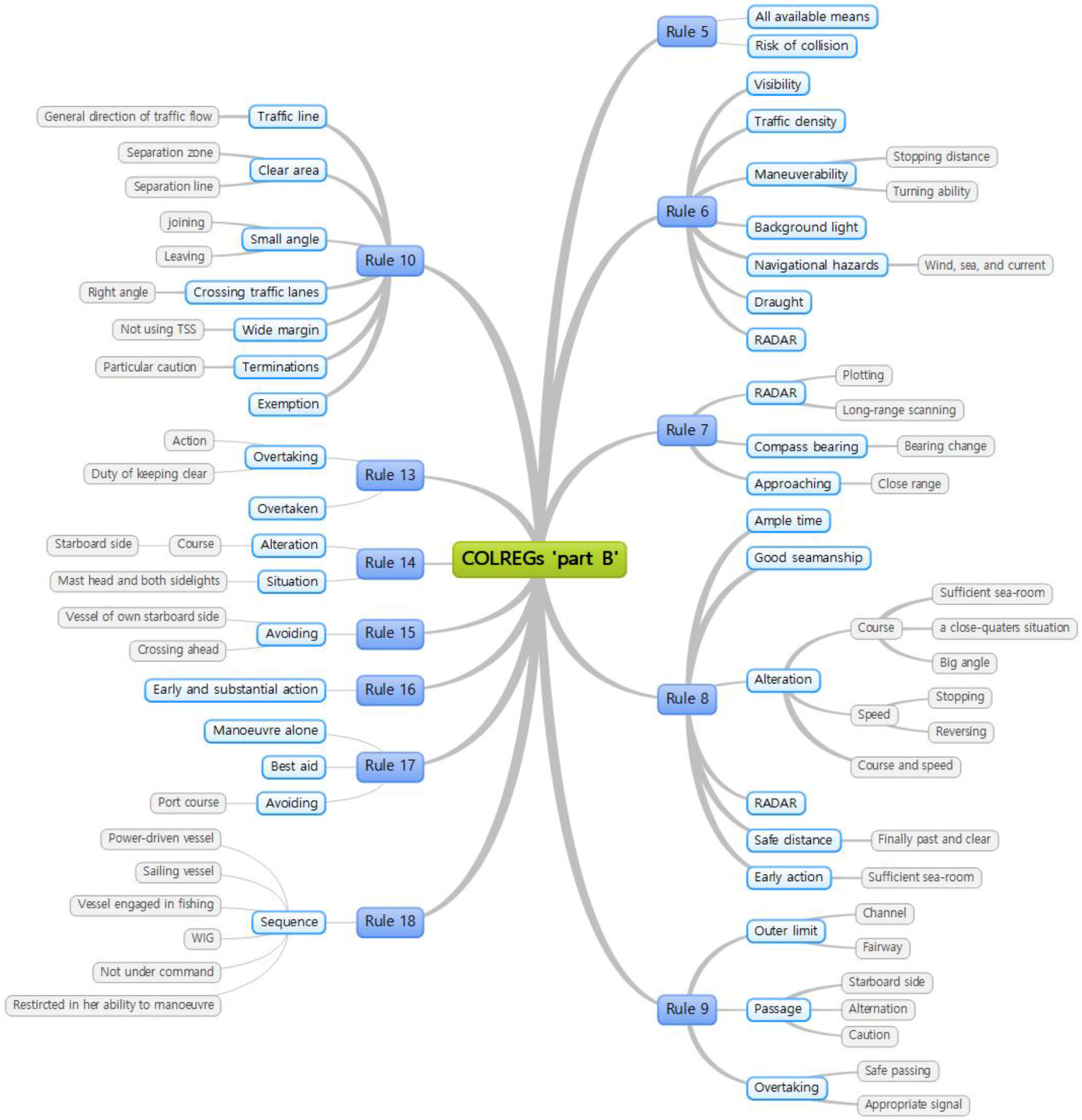
2.3. Requirements Extraction
2.4. Requirements Analysis
2.5. Requirements Specification
3. Verification of Requirements through Application of Representative Local Path-Planning Algorithms
3.1. Requirements Verification
3.2. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Open Sea (Two-Ship, Multi-Ship) and Restricted Waters (Two-Ship, Multi-Ship) | ||
|---|---|---|
| Rule and Keyword | ID | |
| Rule 13 | 13.1. Overtaking 13.1.1. Action 13.1.2. Duty of keeping clear 13.2. Overtaken | ACR-13-13.1.1 ACR-13-13.1.2 ACR-13-13.2 |
| Rule 14 | 14.1. Alteration 14.1.1. Course 14.1.1.1. Starboard side 14.2. Situation 14.2.1. Mast head and both sidelights | ACR-14-14.1.1.1 ACR-14-14.2.1.1 |
| Rule 15 | 15.1. Avoiding 15.1.1. Vessel on own starboard side 15.1.2. Crossing ahead | ACR-15-15.1.1 ACR-15-15.1.2 |
| Rule 16 | 16.1. Early and substantial action | ACR-16-16.1 |
| Rule 17 | 17.1. Maneuver alone 17.2. Best aid 17.3. Avoiding 17.3.1. Port course | ACR-17-17.1 ACR-17-17.2 ACR-17-17.3.1 |
| Rule 18 | 18.1. Sequence 18.1.1. Power-driven vessel 18.1.2. Sailing vessel 18.1.3. Vessel engaged in fishing 18.1.4. WIG 18.1.5. Not under command, 18.1.6. Restricted ability to maneuver | ACR-18-18.1.1 ACR-18-18.1.2 ACR-18-18.1.3 ACR-18-18.1.4 ACR-18-18.1.5 ACR-18-18.1.6 |
| Restricted Water (Two-Ship, Multi-Ship) | ||
|---|---|---|
| Rule and Keyword | ID | |
| Rule 9 | 9.1. Outer limit 9.1.1. Channel 9.1.2. Fairway 9.2. Passage 9.2.1. Starboard side 9.2.2. Alteration 9.2.3. Caution 9.3. Overtaking 9.3.1. Safe passing 9.3.2. Appropriate signal | EI-09-9.1.1 EI-09-9.1.2 EI-09-9.2.1 EI-09-9.2.2 EI-09-9.2.3 EI-09-9.3.1 EI-09-9.3.2 |
| Open Sea (Two-Ship, Multi-Ship) and restricted Waters (Two-Ship, Multi-Ship) | ||
| Rule and keyword | ID | |
| Rule 6 | 6.1. Visibility 6.2. Traffic density 6.3. Background light 6.4. Draft 6.5. RADAR 6.6. Maneuverability 6.6.1. Stopping distance 6.6.2. Turning ability 6.7. Navigation hazards 6.7.1. Wind 6.7.2. Sea 6.7.3. Current | EI-06-6.1 EI-06-6.2 EI-06-6.3 EI-06-6.4 EI-06-6.5 EI-06-6.6.1 EI-06-6.6.2 EI-06-6.7.1 EI-06-6.7.2 EI-06-6.7.3 |
| Rule 10 | 10.1. Traffic line 10.1.1. General direction of traffic flow 10.2. Clear area 10.2.1. Separation zone 10.2.2. Separation line 10.3. Small angle 10.3.1. Joining 10.3.2. Leaving 10.4. Crossing traffic lanes 10.4.1. right angle 10.5. Wide margin 10.5.1. Not using TSS 10.6. Terminations 10.6.1. Particular caution 10.7. Exemption | EI-10-10.1.1 EI-10-10.2.1 EI-10-10.2.2 EI-10-10.3.1 EI-10-10.3.2 EI-10-10.4.1 EI-10-10.5.1 EI-10-10.6.1 EI-10-10.7 |
| Open Sea (Two-Ship, Multi-Ship) and Restricted Waters (Two-Ship, Multi-Ship) | ||
|---|---|---|
| Rule and Keyword | ID | |
| Rule 6 | 6.1. Visibility 6.2. Traffic density 6.3. Background light 6.4. Draft 6.5. RADAR 6.6. Maneuverability 6.6.1. Stopping distance 6.6.2. Turning ability 6.7. Navigation hazards 6.7.1. Wind 6.7.2. Sea 6.7.3. Current | SM-06-6.1 SM-06-6.2 SM-06-6.3 SM-06-6.4 SM-06-6.5 SM-06-6.6.1 SM-06-6.6.2 SM-06-6.7.1 SM-06-6.7.2 SM-06-6.7.3 |
| Rule 8 | 8.1. Ample time 8.2. Good seamanship 8.3. RADAR 8.4. Alteration 8.4.1. Course 8.4.1.1. Sufficient sea-room 8.4.1.2. Close-quarters situation 8.4.1.3. Large angle 8.4.2. Speed 8.4.2.1. Stopping 8.4.2.2. Reversing 8.5. Safe distance 8.5.1. Finally past and clear 8.6. Early action 8.6.1. Sufficient sea-room | SM-08-8.1 SM-08-8.2 SM-08-8.3 SM-08-8.4.1.1 SM-08-8.4.1.2 SM-08-8.4.1.3 SM-08-8.4.2.1 SM-08-8.4.2.2 SM-08-8.5.1 SM-08-8.6.1 |
| Rule 17 | 17.1. Maneuver alone 17.2. Best aid 17.3. Avoiding 17.3.1. Port course | SM-17-17.1 SM-17-17.2 SM-17-17.3.1 |
| Open Sea (Two-Ship, Multi-Ship) and Restricted Waters (Two-Ship, Multi-Ship) | ||
|---|---|---|
| Rule and Keyword | ID | |
| Rule 6 | 6.1. Visibility 6.2. Traffic density 6.3. Background light 6.4. Draft 6.5. RADAR 6.6. Maneuverability 6.6.1. Stopping distance 6.6.2. Turning ability 6.7. Navigation hazards 6.7.1. Wind 6.7.2. Sea 6.7.3. Current | TSM-06-6.1 TSM-06-6.2 TSM-06-6.3 TSM-06-6.4 TSM-06-6.5 TSM-06-6.6.1 TSM-06-6.6.2 TSM-06-6.7.1 TSM-06-6.7.2 TSM-06-6.7.3 |
| Rule 8 | 8.1. Ample time 8.2. Good seamanship 8.3. RADAR 8.4. Alteration 8.4.1. Course 8.4.1.1. Sufficient sea-room 8.4.1.2. Close-quarters situation 8.4.1.3. Large angle 8.4.2. Speed 8.4.2.1. Stopping 8.4.2.2. Reversing 8.5. Safe distance 8.5.1. Finally past and clear 8.6. Early action 8.6.1. Sufficient sea-room | TSM-08-8.1 TSM-08-8.2 TSM-08-8.3 TSM-08-8.4.1.1 TSM-08-8.4.1.2 TSM-08-8.4.1.3 TSM-08-8.4.2.1 TSM-08-8.4.2.2 TSM-08-8.5.1 TSM-08-8.6.1 |
| Rule 17 | 17.1. Maneuver alone 17.2. Best aid 17.3. Avoiding 17.3.1. Port course | TSM-17-17.1 TSM-17-17.2 TSM-17-17.3.1 |
| Open Sea (Two-Ship, Multi-Ship) and Restricted Waters (Two-Ship, Multi-Ship) | ||
|---|---|---|
| Rule and Keyword | ID | |
| Rule 5 | 5.1. All available means 5.2. Risk of collision | SD-05-5.1 SD-05-5.2 |
| Rule 6 | 6.1. Visibility 6.2. Traffic density 6.3. Background light 6.4. Draft 6.5. RADAR 6.6. Maneuverability 6.6.1. Stopping distance 6,6,2. Turning ability 6.7. Navigation hazards 6.7.1. Wind 6.7.2. Sea 6.7.3. Current | SD-06-6.1 SD-06-6.2 SD-06-6.3 SD-06-6.4 SD-06-6.5 SD-06-6.6.1 SD-06-6.6.2 SD-06-6.7.1 SD-06-6.7.2 SD-06-6.7.3 |
| Rule 7 | 7.1. RADAR 7.1.1 Plotting 7.1.2. Long-range scanning 7.2. Compass bearing 7.2.1. Bearing change 7.3. Approaching 7.3.1. Close range | SD-07-7.1.1 SD-07-7.1.2 SD-07-7.2.1 SD-07-7.3.1 |
| Rule 8 | 8.1. Ample time 8.2. Good seamanship 8.3. RADAR 8.4. Alteration 8.4.1. Course 8.4.1.1. Sufficient sea-room 8.4.1.2. Close-quarters situation 8.4.1.3. Large angle 8.4.2. Speed 8.4.2.1. Stopping 8.4.2.2. Reversing 8.5. Safe distance 8.5.1. Finally past and clear 8.6. Early action 8.6.1. Sufficient sea-room | SD-08-8.1 SD-08-8.2 SD-08-8.3 SD-08-8.4.1.1 SD-08-8.4.1.2 SD-08-8.4.1.3 SD-08-8.4.2.1 SD-08-8.4.2.2 SD-08-8.5.1 SD-08-8.6.1 |
| Rule 13 | 13.1. Overtaking 13.1.1. Action 13.1.2. Duty of keeping clear 13.2. Overtaken | SD-13-13.1.1 SD-13-13.1.2 SD-13-13.2 |
| Rule 14 | 14.1. Alteration 14.1.1. Course 14.1.1.1. Starboard side 14.2. Situation 14.2.1. Mast head and both sidelights | SD-14-14.1.1.1 SD-14-14.2.1.1 |
| Rule 15 | 15.1. Avoiding 15.1.1. Vessel on own starboard side 15.1.2. Crossing ahead | SD-15-15.1.1 SD-15-15.1.2 |
| Rule 16 | 16.1. Early and substantial action | SD-16-16.1 |
| Rule 17 | 17.1. Maneuver alone 17.2. Best aid 17.3. Avoiding 17.3.1. Port course | SD-17-17.1 SD-17-17.2 SD-17-17.3.1 |
| Open Sea (Two-Ship, Multi-Ship) and Restricted Waters (Two-Ship, Multi-Ship) | ||
|---|---|---|
| Rule and Keyword | ID | |
| Rule 5 | 5.1. All available means 5.2. Risk of collision | EE-05-5.1 EE-05-5.2 |
| Rule 6 | 6.1. Visibility 6.2. Traffic density 6.3. Background light 6.4. Draft 6.5. RADAR 6.6. Maneuverability 6.6.1. Stopping distance 6.6.2. Turning ability 6.7. Navigation hazards 6.7.1. Wind 6.7.2. Sea 6.7.3. Current | EE-06-6.1 EE-06-6.2 EE-06-6.3 EE-06-6.4 EE-06-6.5 EE-06-6.6.1 EE-06-6.6.2 EE-06-6.7.1 EE-06-6.7.2 EE-06-6.7.3 |
| Rule 7 | 7.1. RADAR 7.1.1. Plotting 7.1.2. Long-range scanning 7.2. Compass bearing 7.2.1. Bearing change 7.3. Approaching 7.3.1. Close range | EE-07-7.1.1 EE-07-7.1.2 EE-07-7.2.1 EE-07-7.3.1 |
| Rule 8 | 8.1. Ample time 8.2. Good seamanship 8.3. RADAR 8.4. Alteration 8.4.1. Course 8.4.1.1. Sufficient sea-room 8.4.1.2. Close-quarters situation 8.4.1.3. Large angle 8.4.2. Speed 8.4.2.1. Stopping 8.4.2.2. Reversing 8.5. Safe distance 8.5.1. Finally past and clear 8.6. Early action 8.6.1. Sufficient sea-room | EE-08-8.1 EE-08-8.2 EE-08-8.3 EE-08-8.4.1.1 EE-08-8.4.1.2 EE-08-8.4.1.3 EE-08-8.4.2.1 EE-08-8.4.2.2 EE-08-8.5.1 EE-08-8.6.1 |
| Rule 9 | 9.1. Outer limit 9.1.1. Channel 9.1.2. Fairway 9.2. Passage 9.2.1. Starboard side 9.2.2. Alteration 9.2.3. Caution 9.3. Overtaking 9.3.1. Safe passing 9.3.2. Appropriate signal | EE-09-9.1.1 EE-09-9.1.2 EE-09-9.2.1 EE-09-9.2.2 EE-09-9.2.3 EE-09-9.3.1 EE-09-9.3.2 |
| Rule 10 | 10.1. Traffic line 10.1.1. General direction of traffic flow 10.2. Clear area 10.2.1. Separation zone 10.2.2. Separation line 10.3. Small angle 10.3.1. Joining 10.3.2. Leaving 10.4. Crossing traffic lanes 10.4.1. Right angle 10.5. Wide margin 10.5.1. Not using TSS 10.6. Terminations 10.6.1. Particular caution 10.7. Exemption | EE-10-10.1.1 EE-10-10.2.1 EE-10-10.2.2 EE-10-10.3.1 EE-10-10.3.2 EE-10-10.4.1 EE-10-10.5.1 EE-10-10.6.1 EE-10-10.7 |
| Rule 13 | 13.1. Overtaking 13.1.1. Action 13.1.2. Duty of keeping clear 13.2. Overtaken | EE-13-13.1.1 EE-13-13.1.2 EE-13-13.2 |
| Rule 14 | 14.1. Alteration 14.1.1. Course 14.1.1.1. Starboard side 14.2. Situation 14.2.1. Mast head and both sidelights | EE-14-14.1.1.1 EE-14-14.2.1.1 |
| Rule 15 | 15.1. Avoiding 15.1.1. Vessel on own starboard side 15.1.2. Crossing ahead | EE-15-15.1.1 EE-15-15.1.2 |
| Rule 16 | 16.1. Early and substantial action | EE-16-16.1 |
| Rule 17 | 17.1. Maneuver alone 17.2. Best aid 17.3. Avoiding 17.3.1. Port course | EE-17-17.1 EE-17-17.2 EE-17-17.3.1 |
| Rule 18 | 18.1. Sequence 18.1.1. Power-driven vessel 18.1.2. Sailing vessel 18.1.3. Vessel engaged in fishing 18.1.4. WIG 18.1.5. Not under command, 18.1.6. Restricted ability to maneuver | EE-18-18.1.1 EE-18-18.1.2 EE-18-18.1.3 EE-18-18.1.4 EE-18-18.1.5 EE-18-18.1.6 |
| Restricted Waters (Two-Ship, Multi-Ship) | ||
| Rule and Keyword | ID | |
| Rule 8 | 8.1. Ample time 8.2. Good seamanship 8.3. RADAR 8.4. Alteration 8.4.1. Course 8.4.1.1. Sufficient sea-room 8.4.1.2. Close-quarters situation 8.4.1.3. Large angle 8.4.2. Speed 8.4.2.1. Stopping 8.4.2.2. Reversing 8.5. Safe distance 8.5.1. Finally past and clear 8.6. Early action 8.6.1. Sufficient sea-room | CA(SC)-08-8.1 CA(SC)-08-8.2 CA(SC)-08-8.3 CA(SC)-08-8.4.1.1 CA(SC)-08-8.4.1.2 CA(SC)-08-8.4.1.3 CA(SC)-08-8.4.2.1 CA(SC)-08-8.4.2.2 CA(SC)-08-8.5.1 CA(SC)-08-8.6.1 |
| Open Sea (Two-Ship, Multi-Ship) | ||
|---|---|---|
| Rule and Keyword | ID | |
| Rule 8 | 8.1. Ample time 8.2. Good seamanship 8.3. RADAR 8.4. Alteration 8.4.1. Course 8.4.1.1. Sufficient sea-room 8.4.1.2. Close-quarters situation 8.4.1.3. Large angle 8.4.2. Speed 8.4.2.1. Stopping 8.4.2.2. Reversing 8.5. Safe distance 8.5.1. Finally past and clear 8.6. Early action 8.6.1. Sufficient sea-room | CA(C)-08-8.1 CA(C)-08-8.2 CA(C)-08-8.3 CA(C)-08-8.4.1.1 CA(C)-08-8.4.1.2 CA(C)-08-8.4.1.3 CA(C)-08-8.4.2.1 CA(C)-08-8.4.2.2 CA(C)-08-8.5.1 CA(C)-08-8.6.1 |
References
- Korean Maritime Safety Tribunal, Status of Marine Accidents. Available online: https://www.kmst.go.kr/web/stcAnnualReport.do?menuIdx=126 (accessed on 22 July 2022).
- Campbell, S.; Naeem, W.; Irwin, G.W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu. Rev. Control 2012, 36, 267–283. [Google Scholar] [CrossRef] [Green Version]
- IMO. Regulatory Scoping Exercise for the Use of Maritime Autonomous Surface Ships (MASS); Tech. Rep. MSC 99/WP.9; IMO: London, UK, 2018. [Google Scholar]
- Fossen, T.I. Marine Control Systems—Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002. [Google Scholar]
- Vagale, A.; Oucheikh, R.; Bye, R.T.; Osen, O.L.; Fossen, T.I. Path planning and collision avoidance for autonomous surface vehicles I: A review. J. Mar. Sci. Technol. 2021, 26, 1292–1306. [Google Scholar] [CrossRef]
- IMO. Convention on the International Regulations for Preventing Collisions at Sea, 8th ed.; Int. Maritime Org.: London, UK, 1972. [Google Scholar]
- Vagale, A.; Bye, R.T.; Oucheikh, R.; Osen, O.L.; Fossen, T.I. Path planning and collision avoidance for autonomous surface vehicles II: A comparative study of algorithms. J. Mar. Sci. Technol. 2021, 26, 1307–1323. [Google Scholar] [CrossRef]
- Zhan, J.; Zhang, D.; Yan, X.; Haugen, S.; Soares, C.G. A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs. Ocean Eng. 2015, 105, 335–348. [Google Scholar]
- Zhang, X.; Wang, C.; Jiang, L.; An, L.; Yang, R. Collision-avoidance navigation systems for Maritime Autonomous Surface Ships: A state of the art survey. Ocean Eng. 2021, 235, 109380. [Google Scholar] [CrossRef]
- Öztürk, Ü.; Akdağ, M.; Ayabakan, T. A review of path planning algorithms in maritime autonomous surface ships: Navigation safety perspective. Ocean Eng. 2022, 251, 111010. [Google Scholar] [CrossRef]
- Ito, M.; Zhnng, F.; Yoshida, N. Collision avoidance control of ship with genetic algorithm. In Proceedings of the IEEE International Conference on Control Applications, Kohala Coast, HI, USA, 22–27 August 1999; pp. 1791–1796. [Google Scholar]
- Tsou, M.C.; Kao, S.L.; Su, C.M. Decision support from genetic algorithms for ship collision avoidance route planning and alerts. J. Navig. 2010, 63, 167–182. [Google Scholar] [CrossRef]
- Hwang, C.-N.; Yang, J.-M.; Chiang, C.-Y. The design of fuzzy collision-avoidance expert system implemented by H-∞ autopilot. J. Mar. Sci. Technol. 2001, 9, 25–37. [Google Scholar] [CrossRef]
- Perera, L.P.; Carvalho, J.P.; Soares, C.G. Autonomous guidance and navigation based on the COLREGs rules and regulations of collision avoidance. In Proceedings of the Advanced Ship Design for Pollution Prevention, Split, Croatia, 23–24 November 2009; Taylor & Francis Group: London, UK, 2010; pp. 205–216. [Google Scholar]
- Perera, L.P.; Carvalho, J.P.; Soares, C.G. Fuzzy logic based decision making system for collision avoidance of ocean navigation under critical collision conditions. J. Mar. Sci. Technol. 2011, 16, 84–99. [Google Scholar] [CrossRef]
- Birattari, M.; Pellegrini, P.; Dorigo, M. On the invariance of ant colony optimization. IEEE Trans. Evol. Comput. 2007, 11, 732–742. [Google Scholar] [CrossRef] [Green Version]
- Tsou, M.C.; Hsueh, C.K. The study of ship collision avoidance route planning by ant colony algorithm. J. Mar. Sci. Technol. 2010, 18, 746–756. [Google Scholar] [CrossRef]
- Bonyadi, M.R.; Michalewicz, Z. Particle swarm optimization for single objective continuous space problems: A review. Evol. Comput. 2017, 25, 1–54. [Google Scholar] [CrossRef]
- Kang, Y.-T.; Chen, W.-J.; Zhu, D.-Q.; Wang, J.-H.; Xie, Q.-M. Collision avoidance path planning for ships by particle swarm optimization. J. Mar. Sci. Technol. 2018, 26, 777–786. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybernet. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Lee, H.-J.; Rhee, K.P. Development of collision avoidance system by using expert system and search algorithm. Int. Shipbuild. Prog. 2001, 48, 197–212. [Google Scholar]
- Han, J.; Cho, Y.; Kim, J.; Kim, J.; Son, N.-S.; Kim, S.Y. Autonomous collision detection and avoidance for ARAGON USV: Development and field tests. J. Field Robot. 2020, 37, 987–1002. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; Volume 2, pp. 500–505. [Google Scholar]
- Lyu, H.; Yin, Y. COLREGS-constrained real-time for autonomous ships using modified artificial potential fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic environments using velocity obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, L.; Shi, P. A real-time collision avoidance learning system for unmanned surface vessels. Neurocomputing 2016, 182, 255–266. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; van Gelder, P.H.A.J.M. Generalized velocity obstacle algorithm for preventing ship collisions at sea. Ocean Eng. 2019, 173, 142–156. [Google Scholar] [CrossRef]
- Namgung, H. Local route planning for collision avoidance of maritime autonomous surface ships in compliance with COLREGs rules. Sustainability 2022, 14, 198. [Google Scholar] [CrossRef]
- Kaelbling, L.P.; Littman, M.L.; Moore, A.W. Reinforcement learning: A survey. J. Artif. Intell. Res. 1996, 4, 237–285. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Roh, M.I. COLREGs-compliant multiship collision avoidance based on deep reinforcement learning. Ocean Eng. 2019, 191, 106436. [Google Scholar] [CrossRef]
- Shen, H.; Hashimoto, H.; Matsuda, A.; Taniguchi, Y.; Terada, D.; Guo, C. Automatic collision avoidance of multiple ships based on deep Q-learning. Appl. Ocean Res. 2019, 86, 268–288. [Google Scholar] [CrossRef]
- Meyer, E.; Heiberg, A.; Rasheed, A. COLREG-compliant collision avoidance for unmanned surface vehicle using deep reinforcement learning. IEEE Access. 2020, 8, 165344–165364. [Google Scholar] [CrossRef]
- Jiang, L.; An, L.; Zhang, X.; Wang, C.; Wang, X. A human-like collision avoidance method for autonomous ship with attention-based deep reinforcement learning. Ocean Eng. 2020, 264, 112378. [Google Scholar] [CrossRef]
- Li, M.; Mou, J.; Chen, L.; Huang, Y.; Chen, P. Comparison between the collision avoidance decision-making in theoretical research and navigation practices. Ocean Eng. 2021, 228, 108881. [Google Scholar] [CrossRef]
- Bourque, P.; Dupuis, R.; Abran, A.; Moore, J.W.; Tripp, L. The guide to the software engineering body of knowledge. IEEE Softw. 1999, 16, 35–44. [Google Scholar] [CrossRef]




| Classification Criteria | |
|---|---|
| Ship anti-collision responsibility | The responsibility of the ship in an encounter situation. According to COLREGs, a ship in an encounter situation can be classified as a give-way vessel, stand-on vessel, or vessel with equal responsibility. |
| Environment interference | Interference from wind, waves, currents, and other factors during the ship motion. |
| Ship maneuverability | The ability of a ship to maintain or change its state of motion under suitable control actions. |
| Target-ship maneuvering | The TS may not necessarily maintain its course and speed during the collision avoidance operation. |
| Ship domain | The area around the ship that is restricted to other ships to ensure navigation safety. |
| Expert experience | The navigation experience and good seamanship of ship officers on board. |
| Collision avoidance action | The ship’s maneuvering behavior to avoid collisions, including speed alteration, course alteration, speed and course alteration, and trajectory planning. |
| Division | Pilot | Captain | First Officer | Second Officer | Third Officer | Total |
|---|---|---|---|---|---|---|
| Participant (Rate) | 3 (10.34%) | 9 (31.04%) | 3 (10.34%) | 6 (20.69%) | 8 (27.59%) | 29 (100%) |
| Ship Anti-Collision Responsibility (Give-Way Vessel) | |
|---|---|
| Open Sea (Two-Ship, Multi-Ship) and Restricted Waters (Two-Ship, Multi-Ship) | |
| Rule 13 | 13.1. Overtaking, 13.1.1. Action, 13.1.2. Duty of keeping clear 13.2. Overtaken |
| Rule 14 | 14.1. Alteration, 14.1.1. Course, 14.1.1.1. Starboard side 14.2. Situation, 14.2.1. Mast head and both sidelights |
| Rule 15 | 15.1. Avoiding, 15.1.1. Vessel on own starboard side, 15.1.2. Crossing ahead |
| Rule 16 | 16.1. Early and substantial action |
| Rule 17 | 17.1. Maneuvering alone, 17.2. Best aid 17.3. Avoiding, 17.3.1. Port course |
| Rule 18 | 18.1. Sequence, 18.1.1. Power-driven vessel, 18.1.2. Sailing vessel, 18.1.3. Vessel engaged in fishing, 18.1.4. WIG, 18.1.5. Not under command, 18.1.6. Restricted ability to maneuver |
| Environmental Interference | |
|---|---|
| Restricted Water (Two-Ship, Multi-Ship) | |
| Rule 9 | 9.1. Outer limit, 9.1.1. Channel, 9.1.2. Fairway 9.2. Passage, 9.2.1. Starboard side, 9.2.2. Alteration, 9.2.3. Caution 9.3. Overtaking, 9.3.1. Safe passing, 9.3.2. Appropriate signal |
| Open Sea (Two-Ship, Multi-Ship) and Restricted waters (TWO-Ship, Multi-Ship) | |
| Rule 6 | 6.1. Visibility, 6.2. Traffic density, 6.3. Background light, 6.4. Draft, 6.5. RADAR 6.6. Maneuverability, 6.6.1. Stopping distance, 6.6.2. Turning ability 6.7. Navigation hazards, 6.7.1. Wind, 6.7.2. Sea, 6.7.3. Current |
| Rule 10 | 10.1. Traffic line, 10.1.1. General direction of traffic flow 10.2. Clear area, 10.2.1. Separation zone, 10.2.2. Separation line 10.3. Small angle, 10.3.1. Joining, 10.3.2. Leaving 10.4. Crossing traffic lanes, 10.4.1. Right angle 10.5. Wide margin, 10.5.1. Not using TSS 10.6. Terminations, 10.6.1. Particular caution 10.7. Exemption |
| Ship Maneuverability, Target Ship Maneuverability | |
|---|---|
| Open Sea (Two-Ship, Multi-Ship) and Restricted Waters (Two-Ship, Multi-Ship) | |
| Rule 6 | 6.1. Visibility, 6.2. Traffic density, 6.3. Background light, 6.4. Draft, 6.5. RADAR 6.6. Maneuverability, 6.6.1. Stopping distance, 6.6.2. Turning ability 6.7. Navigation hazards, 6.7.1. Wind, 6.7.2. Sea, 6.7.3. Current |
| Rule 8 | 8.1. Ample time, 8.2. Good seamanship, 8.3. RADAR 8.4. Alteration, 8.4.1. Course, 8.4.1.1. Sufficient sea-room, 8.4.1.2. Close-quarters situation, 8.4.1.3. Large angle 8.4.2. Speed, 8.4.2.1. Stopping, 8.4.2.2. Reversing 8.5. Safe distance, 8.5.1. Finally past and clear 8.6. Early action, 8.6.1. Sufficient sea-room |
| Rule 17 | 17.1. Maneuver alone, 17.2. Best aid 17.3. Avoiding, 17.3.1. Port course |
| Ship Domain | |
|---|---|
| Open Sea (Two-Ship, Multi-Ship) and Restricted Waters (Two-Ship, Multi-Ship) | |
| Rule 5 | 5.1. All available means, 5.2 Risk of collision |
| Rule 6 | 6.1. Visibility, 6.2. Traffic density, 6.3. Background light, 6.4. Draft, 6.5. RADAR 6.6. Maneuverability, 6.6.1. Stopping distance, 6.6.2. Turning ability 6.7. Navigation hazards, 6.7.1. Wind, 6.7.2. Sea, 6.7.3. Current |
| Rule 7 | 7.1. RADAR 7.1.1 Plotting, 7.1.2. Long-range scanning 7.2 Compass bearing, 7.2.1. Bearing change 7.3. Approaching, 7.3.1. Close range |
| Rule 8 | 8.1. Ample time, 8.2. Good seamanship, 8.3. RADAR 8.4. Alteration, 8.4.1. Course, 8.4.1.1. Sufficient sea-room, 8.4.1.2. Close-quarters situation, 8.4.1.3. Large angle 8.4.2. Speed, 8.4.2.1. Stopping, 8.4.2.2. Reversing 8.5. Safe distance, 8.5.1. Finally past and clear 8.6. Early action, 8.6.1. Sufficient sea-room |
| Rule 13 | 13.1. Overtaking, 13.1.1. Action, 13.1.2. Duty of keeping clear 13.2. Overtaken |
| Rule 14 | 14.1. Alteration, 14.1.1. Course, 14.1.1.1. Starboard side 14.2. Situation, 14.2.1. Mast head and both sidelights |
| Rule 15 | 15.1. Avoiding, 15.1.1. Vessel on own starboard side, 15.1.2. Crossing ahead |
| Rule 16 | 16.1. Early and substantial action |
| Rule 17 | 17.1. Maneuver alone, 17.2. Best aid 17.3. Avoiding, 17.3.1. Port course |
| Expert Experience | |
|---|---|
| Open Sea (Two-Ship, Multi-Ship) and Restricted Waters (Two-Ship, Multi-Ship) | |
| Rule 5 | 5.1. All available means, 5.2 Risk of collision |
| Rule 6 | 6.1. Visibility, 6.2. Traffic density, 6.3. Background light, 6.4. Draft, 6.5. RADAR 6.6. Maneuverability, 6.6.1. Stopping distance, 6.6.2. Turning ability 6.7. Navigation hazards, 6.7.1. Wind, 6.7.2. Sea, 6.7.3. Current |
| Rule 7 | 7.1. RADAR 7.1.1 Plotting, 7.1.2. Long-range scanning 7.2 Compass bearing, 7.2.1. Bearing change 7.3. Approaching, 7.3.1. Close range |
| Rule 8 | 8.1. Ample time, 8.2. Good seamanship, 8.3. RADAR 8.4. Alteration, 8.4.1. Course, 8.4.1.1. Sufficient sea-room, 8.4.1.2. Close-quarters situation, 8.4.1.3. Large angle 8.4.2. Speed, 8.4.2.1. Stopping, 8.4.2.2. Reversing 8.5. Safe distance, 8.5.1. Finally past and clear 8.6. Early action, 8.6.1. Sufficient sea-room |
| Rule 9 | 9.1. Outer limit, 9.1.1. Channel, 9.1.2. Fairway 9.2. Passage, 9.2.1. Starboard side, 9.2.2. Alteration, 9.2.3. Caution 9.3. Overtaking, 9.3.1. Safe passing, 9.3.2. Appropriate signal |
| Rule 10 | 10.1. Traffic line, 10.1.1. General direction of traffic flow 10.2. Clear area, 10.2.1. Separation zone, 10.2.2. Separation line 10.3. Small angle, 10.3.1. Joining, 10.3.2. Leaving 10.4. Crossing traffic lanes, 10.4.1. Right angle 10.5. Wide margin, 10.5.1. Not using TSS 10.6. Terminations, 10.6.1. Particular caution 10.7. Exemption |
| Rule 13 | 13.1. Overtaking, 13.1.1. Action, 13.1.2. Duty of keeping clear 13.2. Overtaken |
| Rule 14 | 14.1. Alteration, 14.1.1. Course, 14.1.1.1. Starboard side 14.2. Situation, 14.2.1. Mast head and both sidelights |
| Rule 15 | 15.1. Avoiding, 15.1.1. Vessel on own starboard side, 15.1.2. Crossing ahead |
| Rule 16 | 16.1. Early and substantial action |
| Rule 17 | 17.1. Maneuver alone, 17.2. Best aid 17.3. Avoiding, 17.3.1. Port course |
| Rule 18 | 18.1. Sequence, 18.1.1. Power-driven vessel, 18.1.2. Sailing vessel, 18.1.3. Vessel engaged in fishing, 18.1.4. WIG, 18.1.5. Not under command, 18.1.6. Restricted ability to maneuver |
| Collision Avoidance Action (Speed and Course) | |
|---|---|
| Restricted Water (Two-Ship, Multi-Ship) | |
| Rule 8 | 8.1. Ample time, 8.2. Good seamanship, 8.3. RADAR 8.4. Alteration, 8.4.1. Course, 8.4.1.1. Sufficient sea-room, 8.4.1.2. Close-quarters situation, 8.4.1.3. Large angle 8.4.2. Speed, 8.4.2.1. Stopping, 8.4.2.2. Reversing 8.5. Safe distance, 8.5.1. Finally past and clear 8.6. Early action, 8.6.1. Sufficient sea-room |
| Collision Avoidance Action (Course) | |
|---|---|
| Open Sea (Two-Ship, Multi-Ship) | |
| Rule 8 | 8.1. Ample time, 8.2. Good seamanship, 8.3. RADAR 8.4. Alteration, 8.4.1. Course, 8.4.1.1. Sufficient sea-room, 8.4.1.2. Close-quarters situation, 8.4.1.3. Large angle 8.4.2. Speed, 8.4.2.1. Stopping, 8.4.2.2. Reversing 8.5. Safe distance, 8.5.1. Finally past and clear 8.6. Early action, 8.6.1. Sufficient sea-room |
| Division | Rule | ID |
|---|---|---|
| Ship anti-collision responsibility (give-way vessel) | 13–18 | ACR-rule no.-keyword no. |
| Environmental interference | 6, 9, 10 | EI-rule no.-keyword no. |
| Ship maneuverability | 6, 8, 17 | SM-rule no.-keyword no. |
| Target ship maneuvering | TSM-rule no.-keyword no. | |
| Ship domain | 5–8, 13–17 | SD-rule no.-keyword no. |
| Expert experience | 5–10, 13–18 | EE-rule no.-keyword no. |
| Collision avoidance action (speed and course) | 8 | CA(SC)-rule no.-keyword no. |
| Collision avoidance action (course) | 8 | CA(C)-rule no.-keyword no. |
| Algorithm | APF | VO | |
|---|---|---|---|
| Number of studies that consider COLREGs rules | 11 | 9 | 5 |
| Number of studies that do not consider COLREGs rules | 15 | 6 | 9 |
| Total number of rules considered in all studies | 71 | 60 | 36 |
| Number of unique COLREGs rules | 12 | 12 | 12 |
| Maximum number of COLREGs rules in all studies | 312 | 180 | 168 |
| COLREGs rules relevance | 21% | 33% | 22% |
| Algorithms | ACR | EI | SM | TSM | SD | EE | CA(SC) | CA(C) |
|---|---|---|---|---|---|---|---|---|
| A[21] | √ | - | √ | - | - | √ | - | √ |
| A[22] | √ | - | √ | - | - | - | - | √ |
| APF [24] | √ | - | √ | √ | √ | - | - | √ |
| VO [26] | √ | - | √ | - | - | √ | √ | - |
| VO [27] | √ | - | √ | - | - | - | - | - |
| VO [28] | √ | - | √ | - | √ | - | √ | - |
| ID | [21] | [22] | APF [24] | VO [26] | VO [27] | VO [28] | |
|---|---|---|---|---|---|---|---|
| Rule 13 | ACR-13-13.1.1 | - | - | √ | √ | √ | √ |
| ACR-13-13.1.2 | - | - | √ | √ | √ | √ | |
| ACR-13-13.2 | - | - | √ | - | - | √ | |
| Rule 14 | ACR-14-14.1.1.1 | √ | √ | √ | √ | √ | √ |
| ACR-14-14.2.1.1 | √ | √ | √ | √ | √ | √ | |
| Rule 15 | ACR-15-15.1.1 | √ | √ | √ | √ | √ | √ |
| ACR-15-15.1.2 | - | - | - | - | - | - | |
| Rule 16 | ACR-16-16.1 | √ | √ | √ | √ | √ | √ |
| Rule 17 | ACR-17-17.1 | √ | √ | √ | √ | √ | √ |
| ACR-17-17.2 | √ | √ | √ | √ | √ | √ | |
| ACR-17-17.3.1 | √ | √ | √ | √ | √ | √ | |
| Rule 18 | ACR-18-18.1.1 | - | - | - | - | - | - |
| ACR-18-18.1.2 | - | - | - | - | - | - | |
| ACR-18-18.1.3 | - | - | - | - | - | - | |
| ACR-18-18.1.4 | - | - | - | - | - | - | |
| ACR-18-18.1.5 | - | - | - | - | - | - | |
| ACR-18-18.1.6 | - | - | - | - | - | ||
| ID | [21] | [22] | APF [24] | VO [26] | VO [27] | VO [28] | |
|---|---|---|---|---|---|---|---|
| Rule 6 | SM-06-6.1 | - | - | √ | - | - | - |
| SM-06-6.2 | - | - | - | - | - | √ | |
| SM-06-6.3 | - | - | - | - | - | - | |
| SM-06-6.4 | - | - | - | - | - | - | |
| SM-06-6.5 | √ | √ | √ | √ | √ | √ | |
| SM-06-6.6.1 | - | - | - | - | - | - | |
| SM-06-6.6.2 | √ | √ | √ | √ | √ | √ | |
| SM-06-6.7.1 | - | - | - | - | - | - | |
| SM-06-6.7.2 | - | - | - | - | - | - | |
| SM-06-6.7.3 | - | - | - | - | - | - | |
| Rule 8 | SM-08-8.1 | √ | √ | √ | √ | √ | √ |
| SM-08-8.2 | - | - | - | - | - | - | |
| SM-08-8.3 | √ | √ | √ | √ | √ | √ | |
| SM-08-8.4.1.1 | √ | √ | √ | √ | √ | √ | |
| SM-08-8.4.1.2 | √ | √ | √ | √ | √ | √ | |
| SM-08-8.4.1.3 | √ | √ | √ | √ | √ | √ | |
| SM-08-8.4.2.1 | - | - | - | - | - | - | |
| SM-08-8.4.2.2 | - | - | - | - | - | - | |
| SM-08-8.5.1 | √ | √ | √ | √ | √ | √ | |
| SM-08-8.6.1 | √ | √ | √ | √ | √ | √ | |
| Rule 17 | ACR-17-17.1 | √ | √ | √ | √ | √ | √ |
| ACR-17-17.2 | √ | √ | √ | √ | √ | √ | |
| ACR-17-17.3.1 | √ | √ | √ | √ | √ | √ | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ohn, S.-W.; Namgung, H. Requirements for Optimal Local Route Planning of Autonomous Ships. J. Mar. Sci. Eng. 2023, 11, 17. https://doi.org/10.3390/jmse11010017
Ohn S-W, Namgung H. Requirements for Optimal Local Route Planning of Autonomous Ships. Journal of Marine Science and Engineering. 2023; 11(1):17. https://doi.org/10.3390/jmse11010017
Chicago/Turabian StyleOhn, Sung-Wook, and Ho Namgung. 2023. "Requirements for Optimal Local Route Planning of Autonomous Ships" Journal of Marine Science and Engineering 11, no. 1: 17. https://doi.org/10.3390/jmse11010017