1. Introduction
The ocean covers 71% of the Earth’s surface, with a total area of 360 million square kilometers, and contains rich resources. Exploration and development of the ocean have been long-term concerns of human development. With the increasing scarcity of resources, it has become an inevitable choice to strengthen the exploration and development of the ocean [
1]. However, due to the harsh and complex underwater environment, it is too dangerous to explore and develop it manually. Therefore, it is safer and more efficient to adopt autonomous underwater vehicles (AUV) to carry out ocean exploration and development. In addition, AUVs are also widely used in lakes, rivers, and other water areas.
Visual information, which plays an essential role in detecting and perceiving the environment, is easy for underwater vehicles to obtain. However, due to many uncertainties in the aquatic environment and the influence of water on light absorption and scattering, and the quality of directly captured underwater images can degrade significantly. Large amounts of solvents, particulate matter, and other inhomogeneous media in the water cause less light to enter the camera than in the natural environment. According to the Beer–Lambert–Bouger law, the attenuation of light has an exponential relationship with the medium. Therefore, the attenuation model of light in the process of underwater propagation is expressed as
In Equation (
1),
E is the illumination of light,
r is the distance,
a is the absorption coefficient of the water body, and
b is the scattering coefficient of the water body. The sum of
a and
b is equivalent to the total attenuation coefficient of the medium.
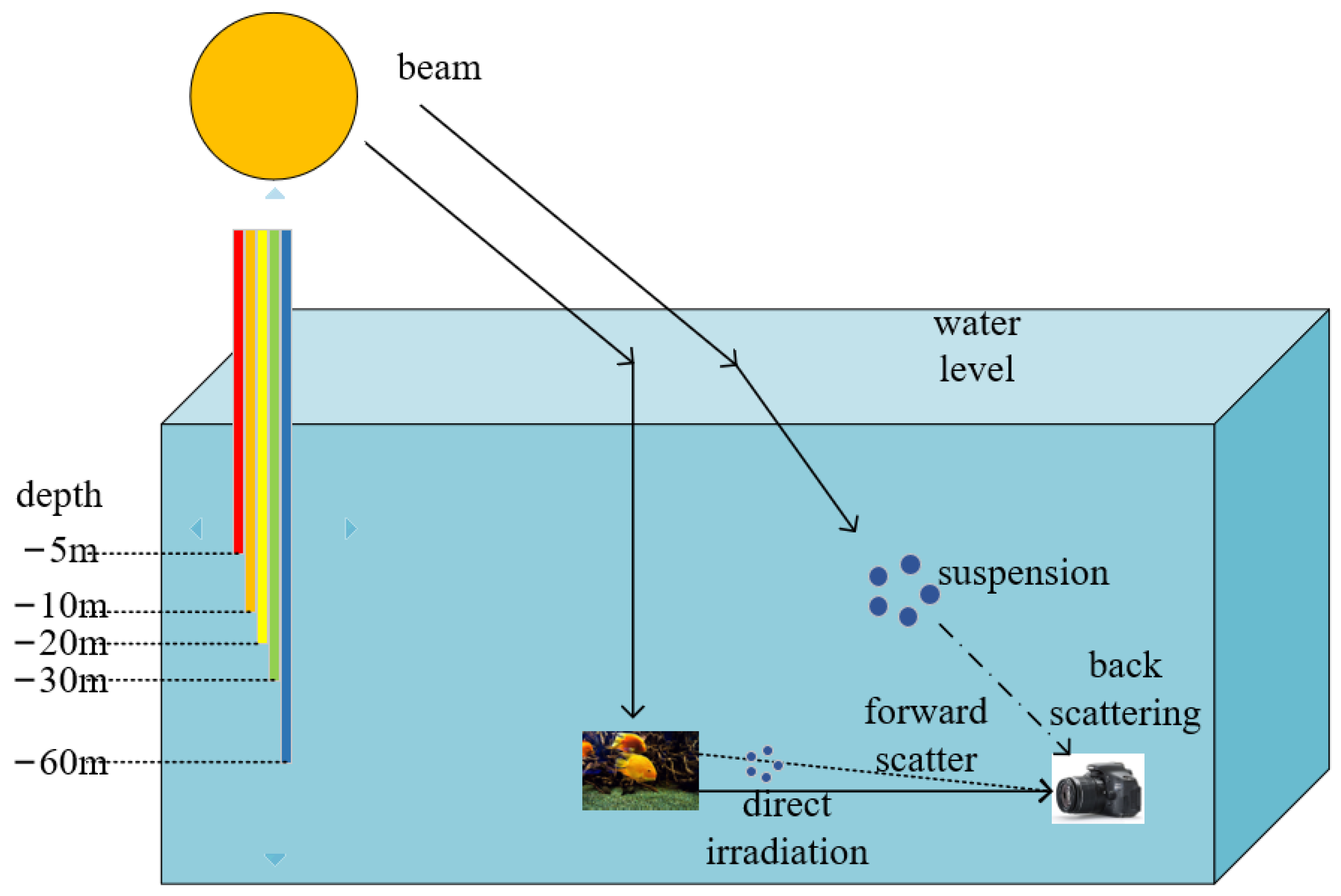
The process of underwater imaging is shown in
Figure 1. As light travels through water, it is absorbed and scattered. Water bodies have different absorption effects on light with different wavelengths. As shown in
Figure 1, red light attenuates the fastest and will disappear at about 5 m underwater, blue and green light attenuates slowly, and blue light will disappear at about 60 m underwater. The scattering of suspended particles and other media causes light to change direction during transmission and spread unevenly. The scattering process is influenced by the properties of the medium, the light, and polarization. McGlamery et al. [
2] presented a model for calculating underwater camera systems. The irradiance of non-scattered light, scattered light and backscattered light can be calculated by input geometry, source properties and optical properties of water. Finally, the parameters such as contrast, transmittance and the signal-to-noise ratio can be obtained. Then, the classical Jaffe–McGlamery [
3] underwater imaging model was proposed. It indicates that the total illuminance entering the camera is a linear superposition of the direct component, the forward scatter component, and the backscattered component
In the equation, , and represent the components of direct irradiation, forward scattering, and backscattering, respectively. The direct irradiation component is the light directly reflected from the surface of the object into the receiver. The forward scattering component refers to the light reflected by the target object in the water, deflected into the receiver by the small angle of suspended particles in the water during straight propagation. Backscattering refers to illuminated light that reaches the receiver through the scattering of the water body. In general, the forward scattering of light attenuates more energy than the backscattering of light.
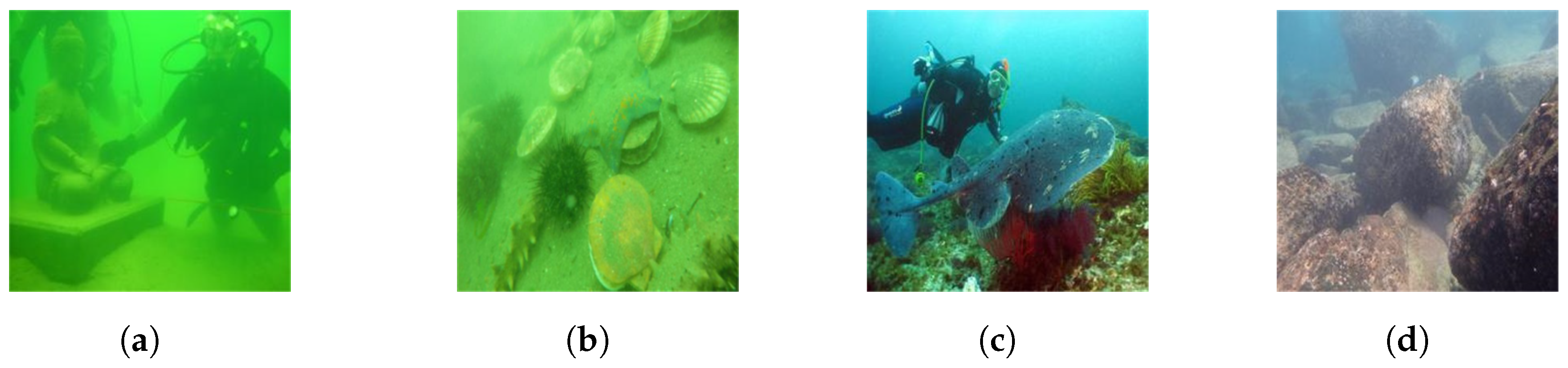
Due to the absorption and scattering of incident light by water bodies, the video images collected underwater generally appear blue-green and have an apparent fog-like effect. In addition, blur, low contrast, color distortion, more noise, unclear details, and limited visual range are the typical problems that degrade the quality of underwater video images [
4].
Figure 2 shows some low-quality underwater images. There is obvious color bias in images a and b, and the overall style is green. The problem with image c is low contrast. Image d represents the atomization phenomenon commonly seen in underwater images.
Low-quality video images are not compatible with the perception of human eyes. They will affect subsequent computer vision tasks, such as video image segmentation [
5,
6], target detection [
7], 3D reconstruction [
8,
9], and other visual processing tasks. In practical application, low-quality underwater video images pose significant challenges to underwater archaeology, biological research, acquisition, and other projects. How to use existing technology to obtain high-quality underwater video images is a very important question. Improving the underwater imaging environment and optimizing the acquisition equipment would strengthen video image acquisition. Although these actions have specific effects, the implementation cost is too high. In contrast, by using computer equipment through digital image processing, high-quality images can be obtained more conveniently and quickly.
Underwater vision enhancement uses computer technology to process degraded underwater images and convert original low-quality images into a high-quality image. The problems of color bias, low contrast, and atomization of original underwater video images are effectively solved by using vision enhancement technology. Enhanced video images improve the visual perception ability and are beneficial for subsequent visual tasks. Therefore, underwater video image enhancement technology has important scientific significance and application value.
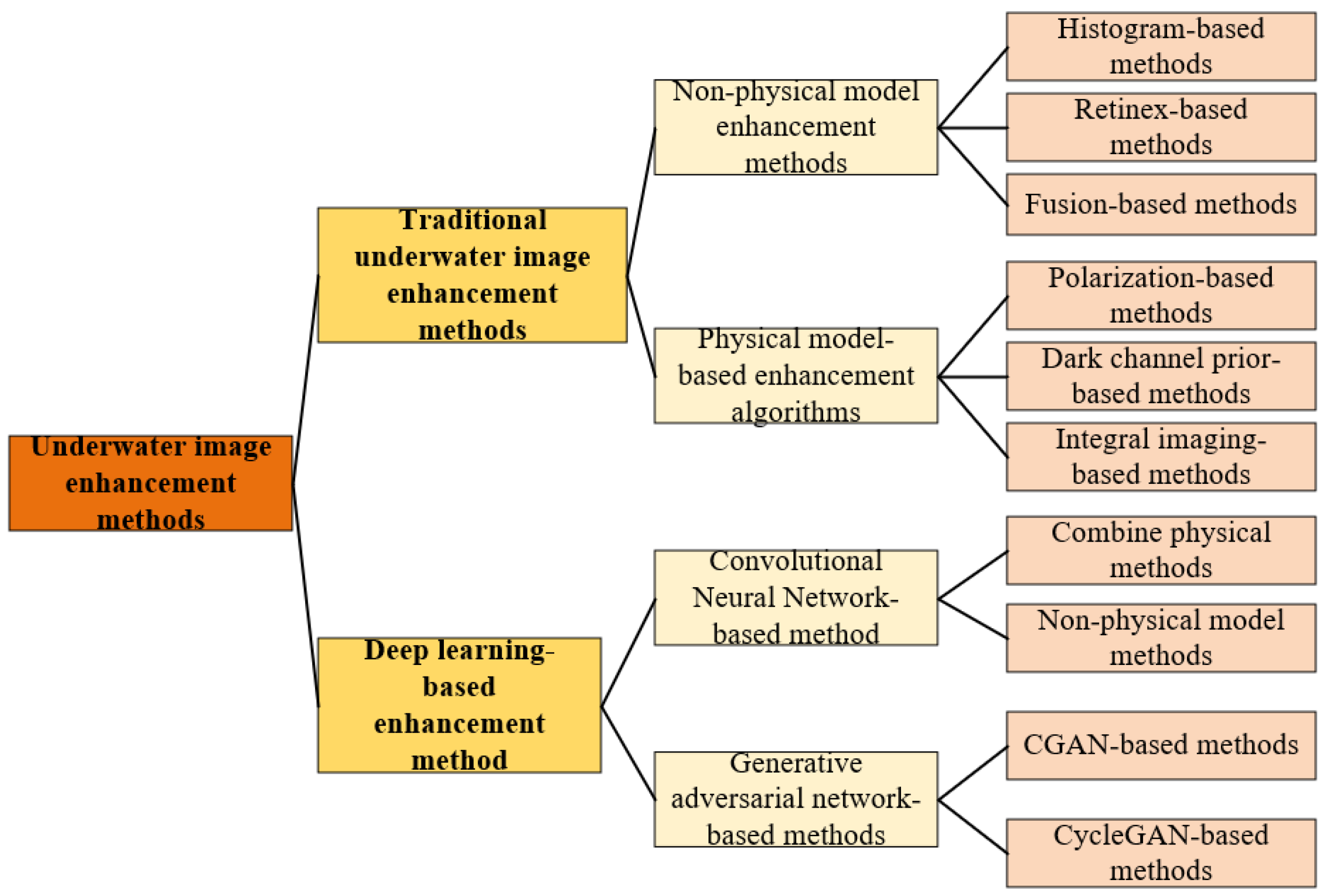
This article is searched in the Google Academic database and CNKI database by the keywords of ’underwater image enhancement’, ’underwater image processing’, and ’underwater video enhancement’, etc. A total of 106 relevant articles were selected, including nine reviews, and the rest were specific algorithms, which were analyzed and summarized. In addition, some commonly used underwater image data sets and evaluation indicators are summarized, involving a total of 28 references. In this paper, the existing underwater image enhancement techniques are classified and summarized, as shown in
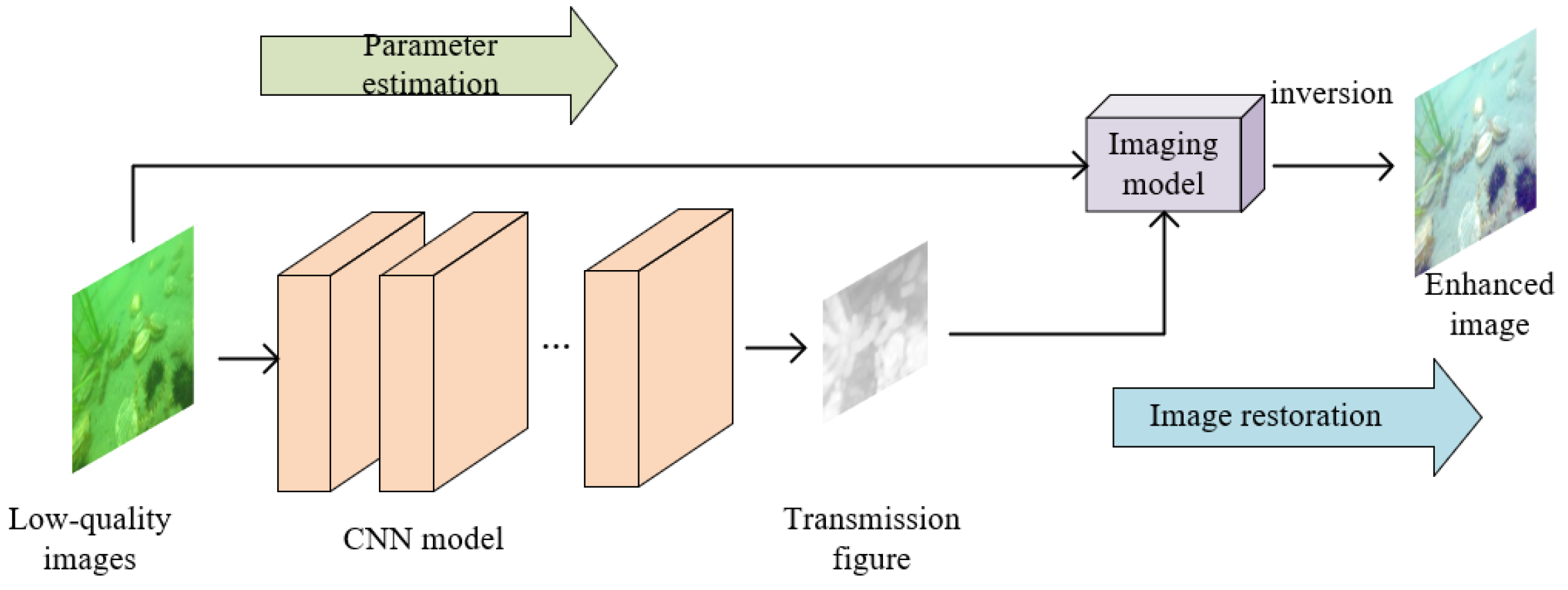
Figure 3. The current algorithms are mainly divided into traditional and deep learning-based methods. Traditional methods include model-based and non-model methods. Non-model enhancement methods, such as the histogram algorithm, can directly enhance the visual effect through pixel changes without considering the imaging principle. Model-based enhancement is also known as the image restoration method. According to the imaging model, the relationship between clear, fuzzy, and transmission images is estimated, and clear images are derived, such as through the dark channel prior (DCP) algorithm [
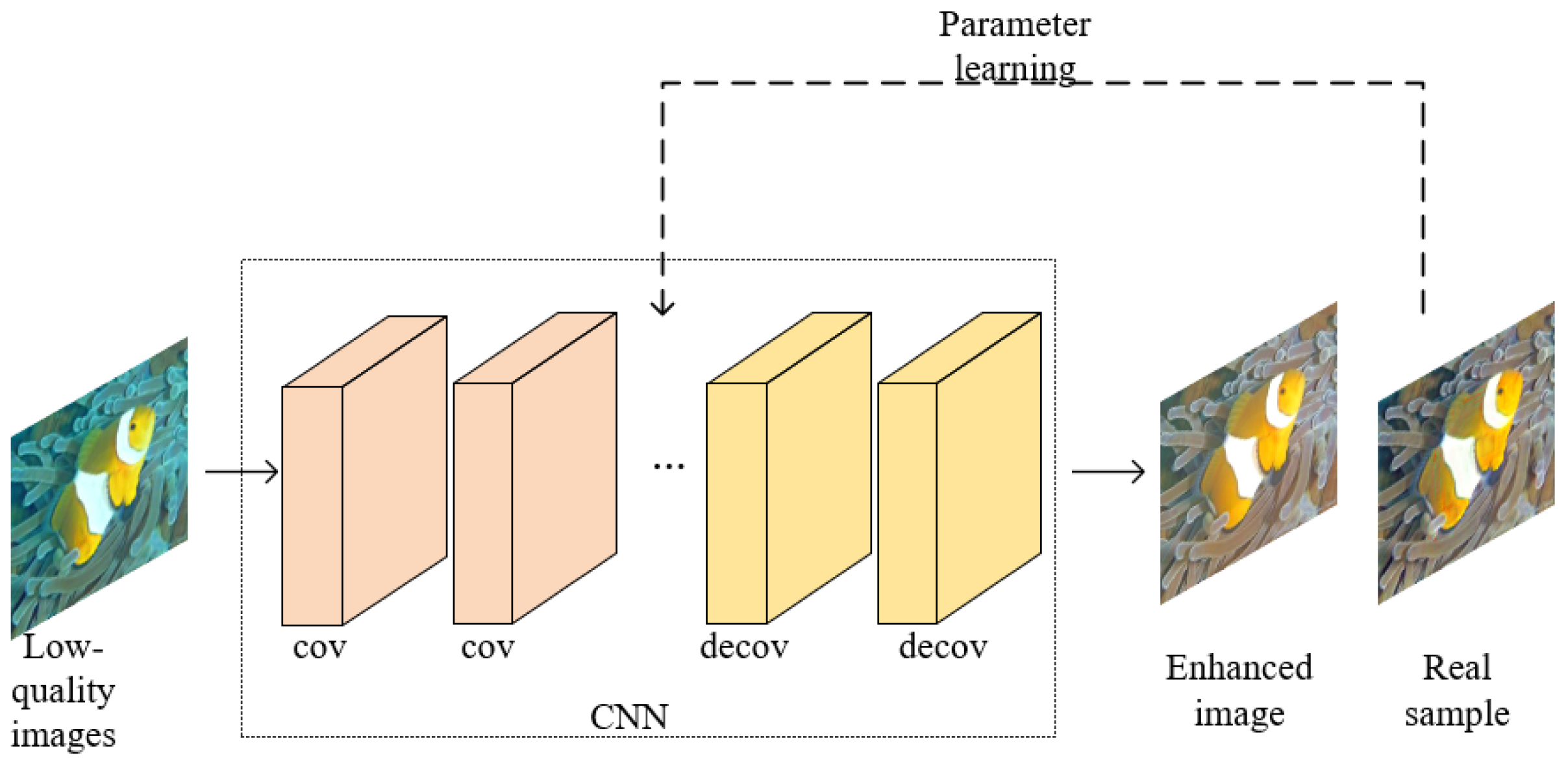
10]. With the rapid development of deep learning technology and its excellent performance in computer vision, underwater image enhancement technology based on deep learning is also developing rapidly. The methods based on deep learning can be divided into those based on convolution neural networks (CNN) [
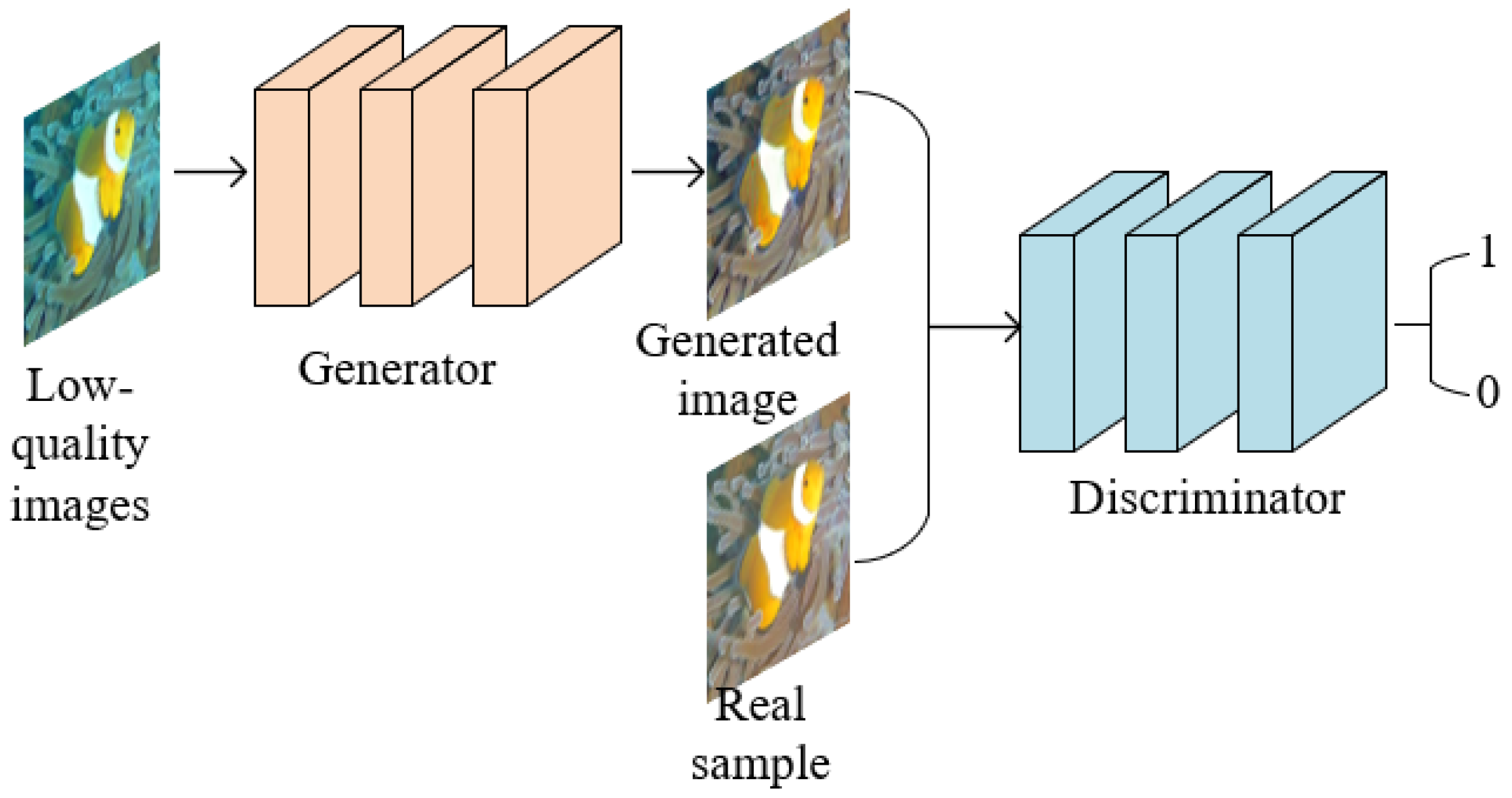
11] and those based on generative adversarial networks (GAN) [
12]. Most of the existing enhancement techniques are extensions of underwater single image enhancement techniques in the video field. Since the development of underwater video enhancement technology is not fully mature, this paper will not classify it for the time being.
We introduced underwater visual enhancement technologies (including video and image) and their development and current status to promote researchers’ further exploration in this field.
Prior to this paper, there have been many excellent review articles focused on the area of underwater image enhancement. As time goes on, new methods, especially algorithms based on deep learning, need to be updated. In addition, the urgent need for underwater video enhancement technology also deserves the review article’s attention. According to the function of the algorithm, the article [
13] divides the algorithms into underwater image dehazing and underwater image color evaluation, surveys the intelligence algorithms in underwater image dehazing and restoration, demonstrates the performance with different methods, and summarizes the application of underwater image processing. However, there is no obvious distinction between algorithms of different principles, and the overview of deep learning-based algorithms is not comprehensive. The article [
14] selects representative methods for discussion, classifies the approaches in two categories: image restoration (physical-based model) and image enhancement (nonphysical-based model), and compares and analyzes these methods from both qualitative and quantitative perspectives. Although some deep learning algorithms have been introduced, the popular generative adversarial network-based approach is missing. Similar to the article [
14], the article [
15] reviews the image enhancement and restoration methods that tackle typical underwater image impairments, including some extreme degradations and distortions. Moreover, a large number of experiments were conducted to compare and evaluate different algorithms, using subjective and objective analysis. Although the enhancement algorithm based on CNN is classified, the popular generative adversarial network-based algorithm is not included. The article [
16] introduces a review of relatively mature and representative underwater image processing models, which are classified into seven categories, including enhancement, fog removal, noise reduction, segmentation, salient object detection, color constancy and restoration. This helps us to understand the whole field of underwater image processing, but in contrast, the algorithm introduced for the specific task of underwater image enhancement is not comprehensive enough. In the article [
17], the authors categorize, analyze and compare underwater image filtering methods for restoration and enhancement and discuss the merits and limitations of these methods and of the evaluation measures used for their validation. This paper presents a number of tables to compare different algorithms, but the algorithm of reference is not described in detail. In addition, the reasons, data sets and evaluation indexes of underwater image degradation are summarized in the above papers.
On the basis of existing reviews, we update and supplement the latest development of underwater visual enhancement technology and divide underwater image enhancement methods into traditional methods and deep learning-based methods. Then the algorithms are classified according to different deep neural network structures and whether physical models are used or not. At the same time, similar to the above article, we summarize the degradation causes of underwater images and the characteristics of low-quality images. In addition, we provide links to commonly used data sets and calculation formulas of evaluation indexes. We classify and analyze the existing underwater image evaluation indexes and summarize the differences of each type of evaluation index and the shortcomings of the existing indexes in the underwater video and image quality evaluation.
However, the above articles, including [
1,
4,
18], only focus on image enhancement algorithms, ignoring underwater video enhancement technology with higher practical application value. This paper makes the following contributions:
We focus on the introduction of specific algorithms to help readers better understand the characteristics and development of certain kinds of algorithms. The application requirements of underwater video enhancement methods are more extensive. We summarize the algorithms suitable for underwater video enhancement and reveal the difficulties existing in the field of underwater video enhancement and some solutions.
The rest of this paper is organized as follows.
Section 2 introduces the traditional underwater image enhancement algorithms, including the histogram-based, retinex-based, fusion-based, polarization-based, and dark channel priority-based methods.
Section 3 introduces the underwater image enhancement algorithm based on deep learning, including CNN-based and GAN-based methods. In
Section 4, some existing and imperfect underwater video enhancement algorithms are introduced. In
Section 5, some commonly used datasets and quality evaluation indices in underwater visual enhancement are listed.
Section 6 summarizes the problems of the existing algorithms and puts forward some future research directions.
4. Underwater Video Enhancement
With the development of underwater video acquisition and data communication technology, real-time underwater video transmission becomes possible. Underwater video with spatiotemporal information and motion characteristics has higher application prospects than underwater images in ocean development. Because of the optical properties, underwater video has some similar problems to underwater images, such as color bias, image blur, low contrast, uneven illumination, etc. At the same time, due to the influence of water flow on video acquisition equipment, the texture features and details of moving objects are weakened or disappear. These problems seriously affect the ability of the underwater video system to accurately collect scene and object features. Unlike atmospheric video enhancement technology, which tends to solve blur and jitter, underwater video enhancement focuses more on solving the harmful effects of the unique optical environment on color and visibility.
Compared with underwater image enhancement technology, underwater video enhancement is more complicated. The research in this direction has not yet reached a mature stage. Most of the existing underwater video enhancement methods are extensions of single image enhancement algorithms. When underwater image enhancement technology is directly applied to video, each frame is enhanced and then connected into a new video. Due to the differences in transmission images and background light between frames, the continuity of the enhanced video is not well maintained, and time artifacts and interframe flicker phenomena can occur.
Because of this defect, some scholars propose reducing the flicker phenomenon by accelerating the processing speed of each underwater image frame. IMSRCP, proposed by Tang et al. [
37], is a fast MSR enhancement method applicable to underwater video. Considering that frequent convolution operation on a large scale will seriously affect the calculation speed, this algorithm extracts features from low-resolution images after subsampling. Subsampling and an IIR Gaussian filter are used to form a fast filter, and 1/2 subsampling is performed on the image repeatedly until the filter size reaches a reasonable range. The IIR Gaussian filter is composed of forward and reverse recursion. The filter is applied to a two-dimensional image’s vertical and horizontal directions to complete the fast two-bit convolution operation. This strategy effectively solves the problem of the strain on computing resources by increased scale and has a significant advantage in speed, enabling it to be extended to underwater video enhancement.
UMCNN, proposed by Li et al. [
82], adopts a lightweight modular structure to adapt to underwater video enhancement. Different from the widely used Densenet structure, the convolutional layer in the network structure of UMCNN is not connected to other convolutional layers in the same block. Moreover, the network does not use any full connection layer or batch normalization processing, making the network memory efficient and fast. Further, the inputting of images directly into each enhancement module layer and the inputting of data reduce the need for a deep network. The whole network comprises three enhancement units, and each unit is composed of three convolution layers. There is a single convolution layer at the end of the network. The total depth of the network is only 10 layers, which reduces the computational cost and is easy to train for use in frame-by-frame enhancement of underwater video.
FUnIE-GAN, proposed by Islam et al. [
99], also has excellent image enhancement speed. A simpler model is adopted in the generator part of the GAN model, which only learns 256 feature graphs of size 8 × 8 with fewer parameters to realize fast inference. In the discriminant part, the recognition is only based on patch-level information rather than global recognition at the image level. This configuration is computationally more efficient because it requires fewer parameters. The entire network structure requires only 17 MB of memory. The computing speed reaches 25.4 frames per second in the embedded system (NVIDIA Jetson TX2), 148.5 frames per second on the graphics card (NVIDIA GTX 1080), and 7.9 frames per second on the CPU (Intel Core i36100 U). It can meet the real-time requirements of underwater robots and has been shown to effectively improve underwater target detection, saliency prediction, and human posture estimation through experiments.
In addition, there are enhancement algorithms to increase speed by reducing computational complexity. Lu et al. [
102] proposed a prior estimation method based on attenuation differences between red channels to estimate transmission patterns, using a triangular filter to compensate the transmission, preserve the edge, remove the noise, and speed up the calculation. At the same time, in the color correction method, the summation operation is replaced by the convolution operation to reduce the computational complexity. Bicnao et al. [
103] proposed a fast enhancement method for underwater images with non-uniform illumination. Based on the gray world hypothesis, according to local changes of brightness and chromaticity, color correction is carried out with the area summation table technique, which reduces the computational complexity and is suitable for video enhancement. Liu et al. [
104] proposed a real-time multithreading underwater image enhancement system that uses an automatic multithreading method. The hardware’s computing power is compacted by creating an optimal number of processing threads for both consistency and real-time performance. The framework improves the computing efficiency by optimizing the computing strategy of the processor, which is independent of the enhancement algorithm used and enhances the real-time performance.
These algorithms often sacrifice image quality to achieve faster processing speed. The commonly used methods include fast filtering, optimal computing strategy, and compressed deep network model, etc. How to strike a balance between video quality and computing speed is an urgent problem to be solved.
The other method to enhance underwater video is to use the timing characteristics of the video combined with the timing relationship between frames. Simply enhancing video frames and connecting them will interrupt the correlations between adjacent frames, and the color consistency of the entire video will not be maintained. Furthermore, the time complexity will be very high. In the image fusion algorithm proposed by Ancuti et al. [
41], the time-bilateral filtering strategy is used for the white balance version of the video frame. A bilateral filter is a non-iterative edge-preserving filter defined on a kernel domain that combines the center pixel in the window with adjacent pixels to enhance sharpness and improve the stability of the smooth region. Time-sequence information is added in time-domain bilateral filtering. In window selection, pixels containing time alignment in adjacent frames are selected to achieve smoothing between frames and maintain temporal coherence.
Li et al. [
105] performed video dehazing and stereo reconstruction simultaneously. The depth cues from stereo matching and fog information reinforce each other, producing better results than traditional stereo or fog removal algorithms. In order to simulate the appearance change caused by the scattering effect, first the light consistency term is improved. The a priori matting Laplace constraint of fog propagation imposes a smoothing constraint to preserve details on scene depth and strengthens the sequence consistency between the scene depth and the fog propagation of adjacent points. These constraints were added to the constructed MRF framework, and the auxiliary variables were introduced for iterative optimization. The algorithm calculates the fog transmission of each pixel directly from the scene depth (and the estimated fog density). This ensures that the stereo reconstruction and defogging results are consistent. Eliminating the ambiguity of air albedo during defogging maintains the time consistency of the final defogging video. In the experiment, the algorithm dealt with underwater video and obtained an excellent defogging effect.
Qing et al. [
106] proposed a space-time information fusion algorithm for underwater video defogging. Based on the DCP algorithm, it optimizes the projection image and estimation of atmospheric light value. In terms of transmission image extraction, the transmission image of the first frame of the video is extracted based on DCP, then refined by the guided filter. Since there is little difference between the transmission images of adjacent frames, the images of subsequent frames are guided by the grayscale image of the frame. The transmission images of the previous frame are input and obtained through linear translation filtering. In estimating the background light, the adjustment factor is designed to avoid frequent changes of the atmospheric light value by combining the current frame’s background light estimation. The computational complexity is reduced because only the projection image is extracted in the first frame using dark channel priors. In addition, the correlation between adjacent frames of the video is presented through the transmission image and estimation of atmospheric light value fused with spatial and temporal information, which reduces the scintillation caused by changes in the transmission image and atmospheric light value.
This algorithm makes full use of the relationship between frames and preserves the timing characteristics of the video. Although extracting time sequence information will increase the complexity of the algorithm, the key frame parameters can be used to replace the adjacent multi-frame images and shorten the calculation time. The underwater video enhancement algorithms are shown in
Table 11.
5. Dataset and Quality Assessment
5.1. Underwater Vision Dataset
For underwater video and image enhancement, the underwater vision dataset is an enhancement object and a sample for deep learning model training, and is used to test algorithm performance. Through the efforts of many scholars, some well-recognized datasets have been established. Li et al. [
91] set the Port Royal dataset by using WaterGAN. Jian et al. [
107] established the OUC-Vision dataset by taking photos of different postures and positions of individuals underwater. Berman et al. [
108] collected images of different locations and water quality levels and made data annotations to establish the SQUID dataset. Li et al. [
81] established a large-scale real underwater image enhancement benchmark dataset (UIEBD), which includes underwater images with different degrees of degradation and corresponding high-quality reference images. Liu et al. [
109] established real-world underwater image enhancement (RUIE) by using the multi-view underwater imaging system. It includes underwater image quality sets (UIQs), underwater color deviation sets (UCCS), and underwater advanced mission drivers (UHTS). Islam et al. [
99] constructed the EUVP dataset with 12,000 paired and 8000 unpaired cases by capturing underwater video from different cameras and the internet. Wei et al. [
110] established MABLs, the first dataset for background light estimation of underwater images, consisting of 500 images with different scenes and distortion levels, with manually labeled background light values. Underwater vision datasets are shown in
Table 12.
5.2. Quality Assessment of Underwater Video and Images
Image quality assessment (IQA) and video quality assessment (VQA) play important roles in video image enhancement. A reasonable quality assessment reflects the quality of video images and has important significance for performance evaluation of enhancement algorithms and guiding the optimization direction of the algorithm. The standard of video and image quality evaluation can be divided into subjective and objective methods. A subjective evaluation of the video or image is given by the observer and is usually represented by the mean opinion score (MOS) or differential mean opinion score (DMOS).
Subjective scoring relies on the optical characteristics of human eyes, but it does not apply to the quality of underwater video images because of its heavy workload, poor real-time performance, and inability to be realized automatically. In particular, subjective indicators cannot quickly and accurately evaluate a large amount of data in the face of the current popular deep learning methods. Objective evaluation uses computer algorithms for scoring, which can be real-time online evaluation. It is better adapted for underwater visual enhancement tasks. According to whether reference images are needed in the evaluation, it can be divided into three kinds of methods: full reference (FR), reduced reference (RR), and no reference (NR).
Full reference image quality evaluation compares the reference image with the distorted image and calculates the difference to obtain a score. Traditional full-reference and semi-reference evaluation indicators include mean square error (MSE), peak signal-to-noise ratio (PSNR) [
111], structural similarity index (
SSIM) [
112], visual information fidelity (VIF) [
113], visual signal-to-noise ratio (VSNR) [
114], and most apparent distortion (MAD) [
115]. Unreferenced evaluation, also known as blind image quality (BIQ), only estimates image quality according to its own characteristics and is independent of image content. Commonly used non-reference image quality assessments include blind image quality index (BIQI) [
116], entropy [
117] and natural image quality evaluator (NIQE) [
118]. NR assessments directly calculates the objective quality of the image, which is more widely used in underwater data without labels. At the same time, the strategy of using NR assessments to optimize parameters in the algorithm is also very common.
Due to the universality of NR indicators, many quality assessment models based on deep learning have been proposed, for example, neural image assessment (NIMA) [
119], which is a novel approach to predict both technical and aesthetic qualities of images, deep image quality assessor (DIQA) [
120], and multi-task end-to-end optimized network (MEON) [
121]. Quality assessment models based on deep learning have better data fitting ability and less error with subjective indicators.
Non-reference quality evaluation indices used especially for underwater images include underwater color image quality evaluation (UCIQE) proposed by Yang et al. [
122], underwater image quality measure (UIQM) proposed by Panetta et al. [
123], and colorfulness–contrast–fog density (CCF) proposed by Wang et al. [
124]. Compared with evaluation indicators, these indexes can better reflect the contrast, color richness and atomization of underwater images. Underwater vision enhancement algorithms use these quality assessment models to measure the performance of the algorithm.
There are some similarities between video quality and image quality evaluation methods, and image quality evaluation indices such as PSNR and SSIM can be applied directly. However, they only reflect the quality of the frame in the video. They cannot reflect the motion characteristics of the video that are different from the image and the accompanying timing information. Quality assessment methods used for video include motion-based video integrity evaluation (MOVIE) [
125], video quality model (VQM) [
126], spatiotemporal most-apparent-distortion model (STMAD) [
127], and deep learning-based video quality evaluation models such as DeepVQA [
128], C3DVQA [
129], SACONV A [
130], and Deep BVQA [
131].
At present, there are few studies on underwater video quality evaluation, and they do not have good applicability. For example, Moreno-Roldan et al. [
132] proposed the generalization—non-linear regression model (NLR.G) and accuracy—non-linear regression model (NLR.A) to evaluate underwater video quality. Song et al. [
133] proposed a no-reference underwater video quality assessment model (NR-NVQA) based on spatial natural characteristics and coding parameters. These models have not been widely used due to insufficient samples or over-fitting of models. The development of underwater video enhancement technology is in urgent need of more evaluation indexes with good performance.
Due to the complexity of the underwater environment, there are many reasons for distortion and quality degradation. The general video image quality index cannot fully reflect the natural underwater environment. Even the widely used indicators for underwater images, UCIQE and UIQN, tend to score more strongly in favor of highly colored underwater images. Reasonable and universal underwater video quality assessments are even rarer. Therefore, underwater video image enhancement is of great significance in order to develop more accurate and suitable indicators that reflect underwater video image quality and have good generalization performance.
Some indexes with high utilization rates in underwater image quality assessment are calculated as follows:
In the equation, M and N are the height and width of the image, is the pixel value of the reference image , is the pixel value of the image to be tested , and represents the whole image after sum. The smaller the is, the closer the image to be measured is to the reference image, and the higher the quality is.
In the equation, the value of the numerator represents the maximum value of the color of the image point, which is 255 if each sample point is represented by 8 bits. The denominator is . The larger the is, the higher the fidelity of the image to be tested to the reference image is, and the higher the image quality is.
In the equation, x is the reference image, and y is the image to be measured. represents the average value of the image, while is the standard deviation of the image. represents the covariance between x and y. To avoid having a zero denominator, and are very small constants. The is between 0 and 1; the closer it is to 1, the better the image quality is.
In the equation, represents the probability of image gray value I appearing in the image, n is the total number of image gray levels, . The higher the Entropy, the higher the image quality.
In the equation, the calculation of needs to obtain the mean value , and variance matrix , of the natural image and distorted image by fitting the natural image and distorted image and then calculate the distance between the fitting parameters of natural image and distorted image to measure the image quality. NIQE represents the distance between the image to be measured and the natural image, and the smaller the value, the higher the quality of the image.
In the equation,
is the standard deviation of color concentration,
is the contrast of brightness,
is the mean value of saturation.
,
,
are weighted coefficients with values of
,
and
, respectively. The coefficient is derived from data in Reference [
122]. The higher the
, the better the image quality.
In the equation,
is a weighted combination of
(underwater image colorfulness measure),
(underwater image sharpness measure) and
(underwater image contrast measure). The weight coefficients
,
,
. This coefficient setting is taken from Reference [
123] and fitted by using multiple linear regression. The larger
is, the better the overall quality of the image is.
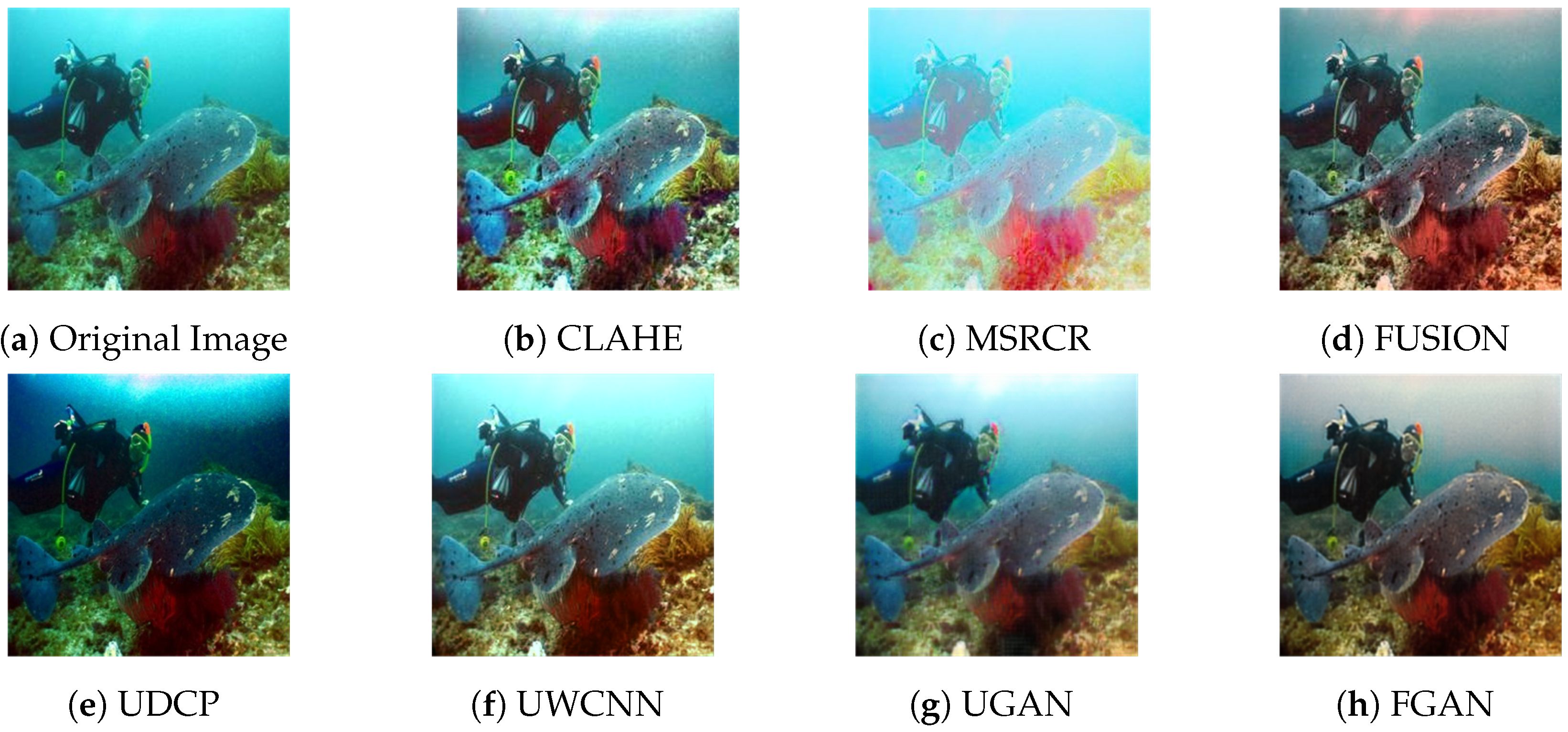
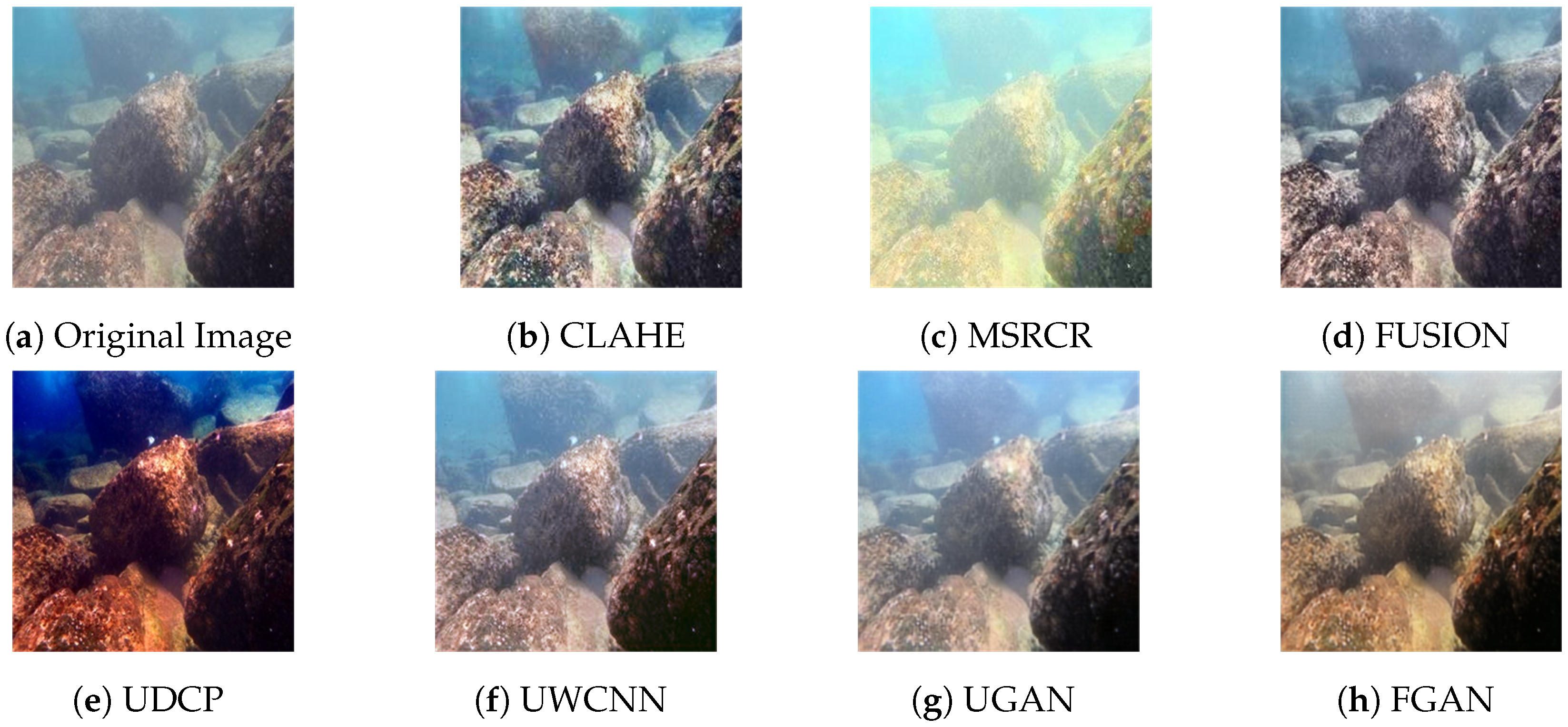
5.3. Algorithm Result
To verify the performance of these algorithms, we selected some typical algorithms from different categories, including CLAHE [
21], MSRCR [
34], FUSION [
42], UDCP [
59], UWCNN [
82], UGAN [
96], and FGAN [
99]. We tested it on an effective and public underwater test dataset (U45) [
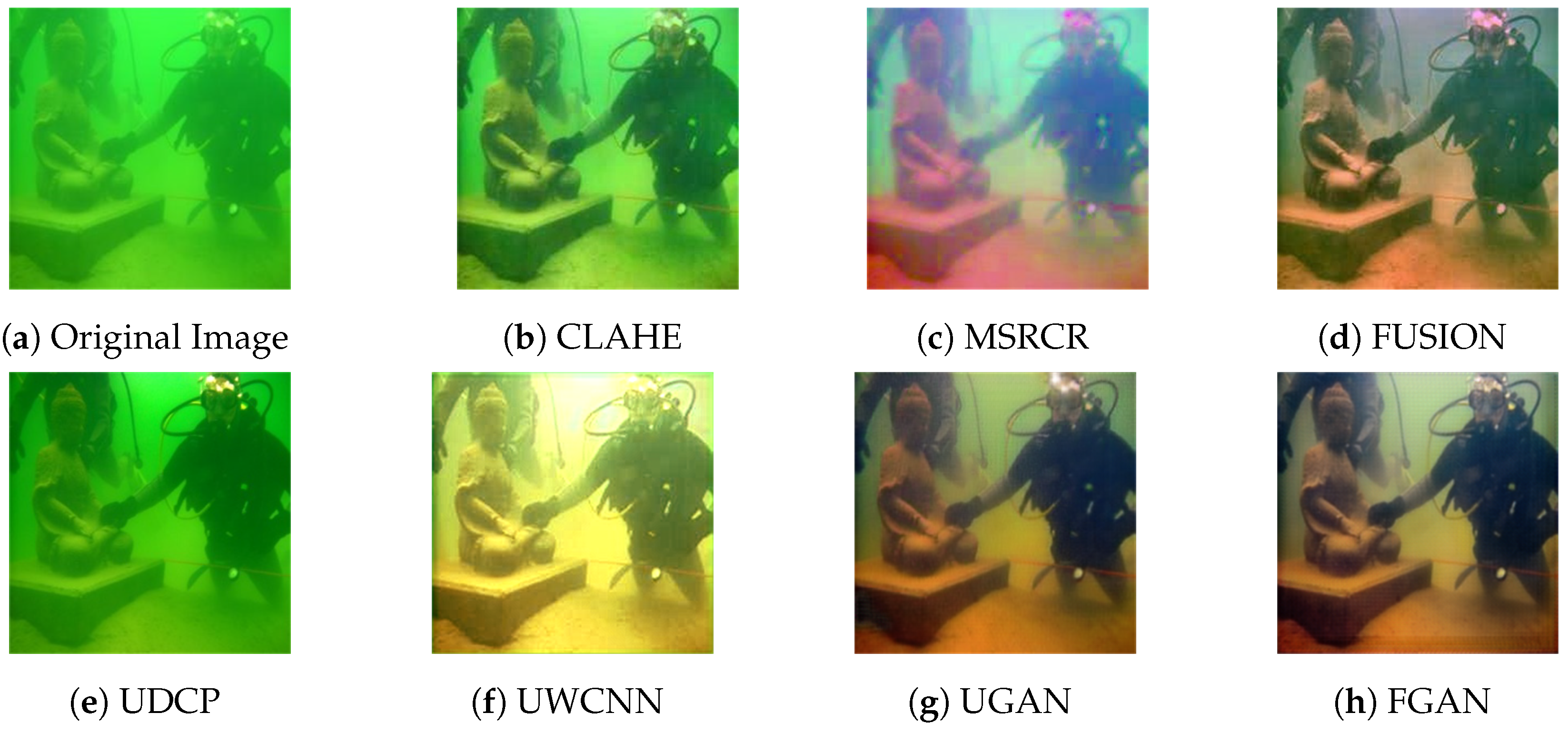
134], which includes the color casts, low contrast and haze-like effects of underwater degradation. This represents a typical feature of low-quality underwater images. The results are shown in
Figure 8,
Figure 9 and
Figure 10.
The performance of the algorithm cannot be fully reflected only from subjective visual perception. Therefore, the UCIQE underwater image quality index and NIQE natural image quality index were selected for test and evaluation. The average results are shown in
Table 13.
We evaluated both subjective visual effects and objective quality indicators. From the subjective visual effects, it can be seen that the histogram-based algorithm has an obvious effect on color and contrast enhancement, but the red part may have excessive enhancement. After the MSRCR algorithm is enhanced, the brightness is greatly improved, but some colors are distorted and the details are blurred. Based on the fusion algorithm, the green and fog environment is improved, and the blue scene will produce a redshift. The UDCP algorithm has excellent defogging performance but has obvious defects in improving image color and even deepens green and blue. The performance of traditional algorithms varies with different data sets. It can be seen that the performance of CLAHE algorithm and UDCP algorithm is not superior in processing green images. The MSRCR algorithm has insufficient ability to remove fog. The algorithm based on fusion can well adapt to the degraded images in various environments. Although DCP algorithm has a significant effect on fog removal, the green and blue parts are significantly deepened. The algorithm based on deep learning is more natural in color truth, without obvious distortion or excessive enhancement effects, and has a good enhancement effect for different underwater environments. Because the large underwater image data set used in the training network covers a variety of underwater degraded images, the deep network fully learns these degraded features. To analyze the objective indicators, when using UCIQE, a special evaluation index for underwater images, the MSRCR algorithm and FUSION algorithm of traditional algorithms have higher UCIQE value in processing green scene images, which is superior to CLAHE and UDCP algorithms. The three algorithms based on deep learning are better than traditional algorithms in UCIQE. In blue scenes, the UCIQE index of images evaluated by the UDCP algorithm is better than other traditional methods, and the image quality enhanced by MCNN and UGAN based on deep learning is comparable. In the atomization scene, the UCIQE index of the evaluated image of the UDCP algorithm is significantly improved, which is due to the excellent defogging ability of the original DCP algorithm. The algorithm based on deep learning has yet to be improved in this method. By integrating the three scenarios, traditional algorithms have different performances in processing images of different scenarios, while deep learning algorithms have good enhancement effects in different underwater environments. As a supplement to the evaluation results of natural image index NIQE, it can also be seen that the image processed by the enhancement method based on deep learning is significantly different from the natural or underwater image in terms of indicators, and the change effect is quite obvious.
6. Conclusions and Future Research Directions
As an essential carrier of marine ecosystem information, underwater video images play an indispensable role in advanced computer vision tasks such as underwater target recognition and detection, and underwater navigation, etc. However, due to the interference of the complex underwater environment and natural factors, underwater video images suffer from serious blurring and color fading. With the ongoing efforts of many scholars, underwater image enhancement technology has made significant progress, but the technology is not yet mature. Traditional enhancement methods can achieve better results when aiming at a certain type of underwater image or an image with certain characteristics. Still, their applicability is not broad enough due to the changing and complex underwater environment. The method based on deep learning can reduce the impact of the complex underwater environment on the results by learning many samples. However, it is highly dependent on the dataset, and the coverage of the current dataset is still limited. At the same time, most deep learning-based methods do not fully integrate the underwater imaging model and focus on enhancement. Therefore, the development of underwater video image enhancement technology can be further strengthened in the following directions:
(1) Improve adaptability and robustness. Although single image processing methods have made significant progress due to the complex underwater environment, most of the existing image processing methods are only effective for a specific type of underwater image environment. The adaptability and robustness still need to be improved.
(2) Establish a more comprehensive underwater image dataset. Deep learning is highly dependent on the quality of datasets, but the lack of sufficient reference images for underwater images greatly limits the effectiveness of deep learning-based methods. Building a more comprehensive dataset covering different subsea environments will help improve the adaptability of the algorithm, and the dataset can be used to test and enhance the algorithm’s performance.
(3) Improve the underwater video and image quality evaluation system. At present, most researchers only evaluate the performance of underwater image processing methods through subjective indicators, UIQM and UICQE. Although these are widely used, they are based on the characteristics of the human visual system and tend to be graded in favor of over-enhanced color maps. Therefore, it is of great significance to develop an objective evaluation index with good generalization performance and solid anti-jamming ability. We think the aesthetic image quality indicators, such as NIMA, can assist in underwater image optimization to improve the image of subjective feeling.
(4) Improve real-time performance and strengthen research on underwater video enhancement technology. Existing methods mainly focus on single underwater images, mostly on improving performance, and cannot be directly applied to underwater video enhancement let alone meet the high real-time requirements of underwater vehicles. At the same time, we should pay more attention to the enhancement effect of underwater video and make full use of the timing characteristics.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}