1. Introduction
According to the Food and Agriculture Organization of the United Nations [
1], there are about 4.6 million fishing vessels worldwide as of 2014; about 64% of them are equipped with engines, among which there are 85% vessels that have lengths of 12 m or less; 13%, that are 12–24 m long; and 2% that are 24 m or longer. Most fishing vessels are smaller than 12 m in length. In Korea, the number of marine ship accidents is gradually increasing every year. Over the past five years, ships weighing less than 10 tons have accounted for 65.07% of all accidents [
2]. Furthermore, ship overturning accidents are the most frequently occurring marine accidents, therefore it is necessary to prepare safety measures for small ships weighing less than 10 tons. Safety performances for medium and large commercial ships are verified during the design stage through various experiments or numerical analyses established based on international and domestic laws and regulations. However, a review of the operational safety performance of small fishing vessels was not sufficiently conducted due to the lack of related laws and economic constraints.
Small fishing vessels are operated in the sea under relatively high wave conditions; such a voyage results in a very large motion amplitude, which can degrade or limit the operational performance of the vessel. In other words, a small ship sailing in a real sea area under adverse weather conditions can suffer from damage to the hull and increased risk to human life because of wave impact and excessive acceleration; furthermore, the characteristics of ship response exhibit an absolute dependence on waves.
Among all ship motion factors, roll motion has the highest influence on the safety of small fishing vessels [
3]. Roll exhibits a large synchronization phenomenon in the natural roll period and a relatively large motion response in a period other than the natural period [
4,
5]. Therefore, the roll motion response needs to be calculated not only in the synchronization period but also in several other periods to understand these characteristics. Míguez González and Bulian [
6] performed detailed analyses of the operational conditions and problems of fishing vessels around the world and the roll response characteristics based on various wave periods and wave steepness in the head and beam seas for trawlers. Since roll motion is closely related to heave and pitch motion, it is necessary to analyze the response characteristics with vertical motions considering the viscous effect, rather than analyzing the roll motion separately.
Fishing vessels are exposed to head waves or transverse waves for a long period in stationary state when performing tasks such as letting out and reeling in fishing nets. Furthermore, the vessel operates with normal service speed when heading to the fishing ground for fishing or returning to the home port after fishing.
Thus far, several studies have investigated the effect of forward speed on ship roll motion [
7,
8,
9]. These studies report that the roll angle decreases when the speed exceeds a certain level. Falzarano et al. [
10] analyzed that eddy damping was reduced by the forward speed, and lift damping was dominant among all roll damping factors.
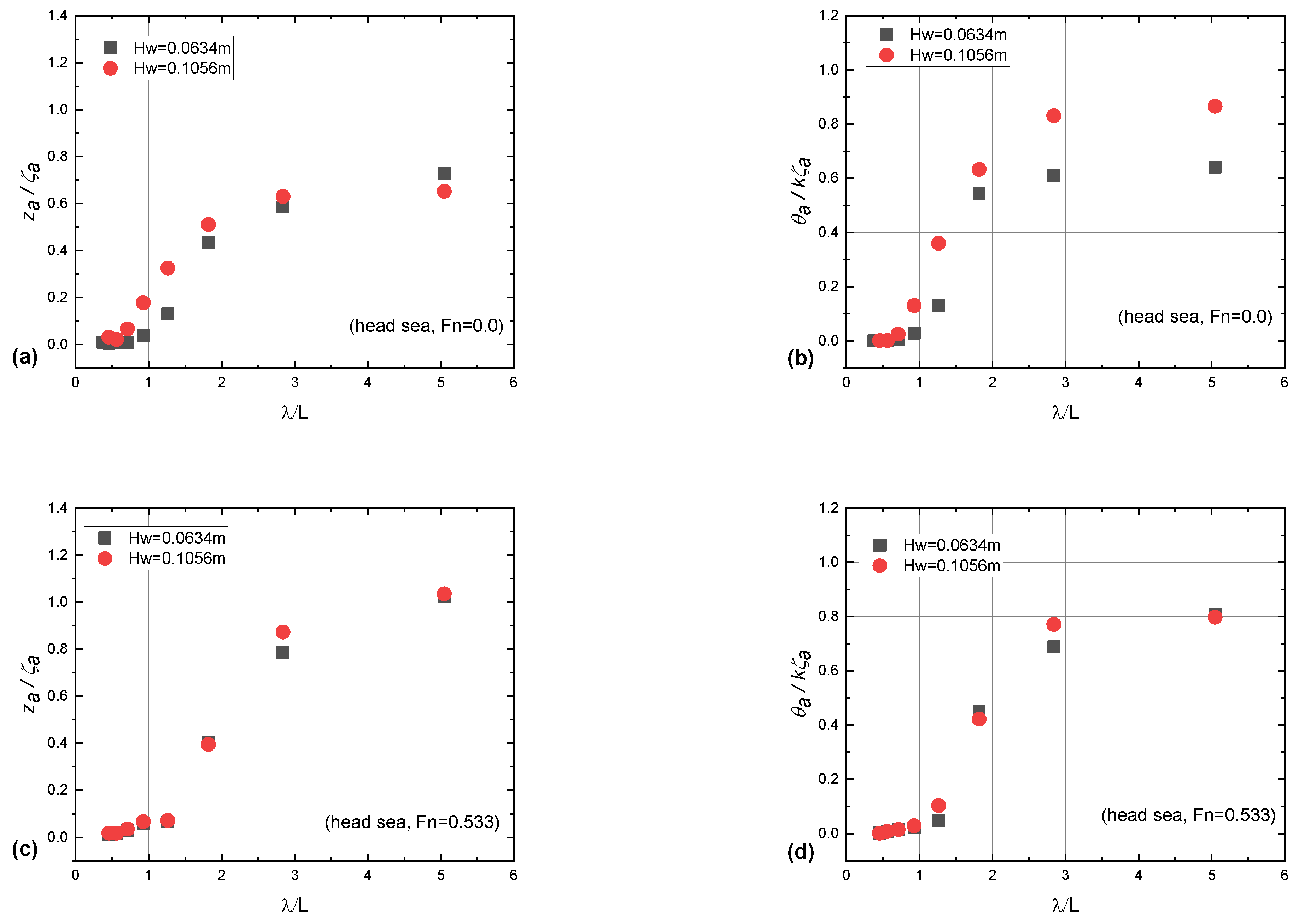
The motion response characteristics in the same vessel are different because of the change in wave height; the roll response value increases with an increase in wave height [
11]. It is shown that the heave and pitch motion responses, which affect the maneuverability of the ship, are increased by the wave height [
12].
An accurate understanding of the response characteristics of a ship under various operating conditions such as changes in ship speed and external force conditions (e.g., fluctuations in wave height) is an essential requirement for ensuring the safe operation of ships in irregular waves. However, most of the abovementioned studies compare only the amplitude value of the response function among regular waves. Probabilistic studies to determine the situation in which a fishing vessel may be in danger because it has exceeded the operating limit in the real sea have not been conducted as much as compared to studies on merchant ships. Tello et al. [
13] conducted a short-term prediction for seakeeping performance based on ship speed and the angle of encounter for 11 fishing vessels of various sizes; their results indicated that roll and pitch were the most critical factors and that GM had an important effect on the roll movement. Mata-Álvarez-Santullano et al. [
14] compared the correlation between the stability and operability of fishing vessels.
In order to accurately evaluate the seakeeping performance, a numerical analysis that can examine the viscous effect on roll motion, wave impact with strong nonlinearity, and large amplitude motion of a ship is required. Computational fluid dynamics (CFD) was used to analyze the roll hydrodynamic coefficients with strong nonlinearity [
15] and the slamming phenomenon caused by wave impact [
16]. However, potential-based numerical analysis techniques are mostly used to analyze hull motion when evaluating the seakeeping performance of fishing vessels.
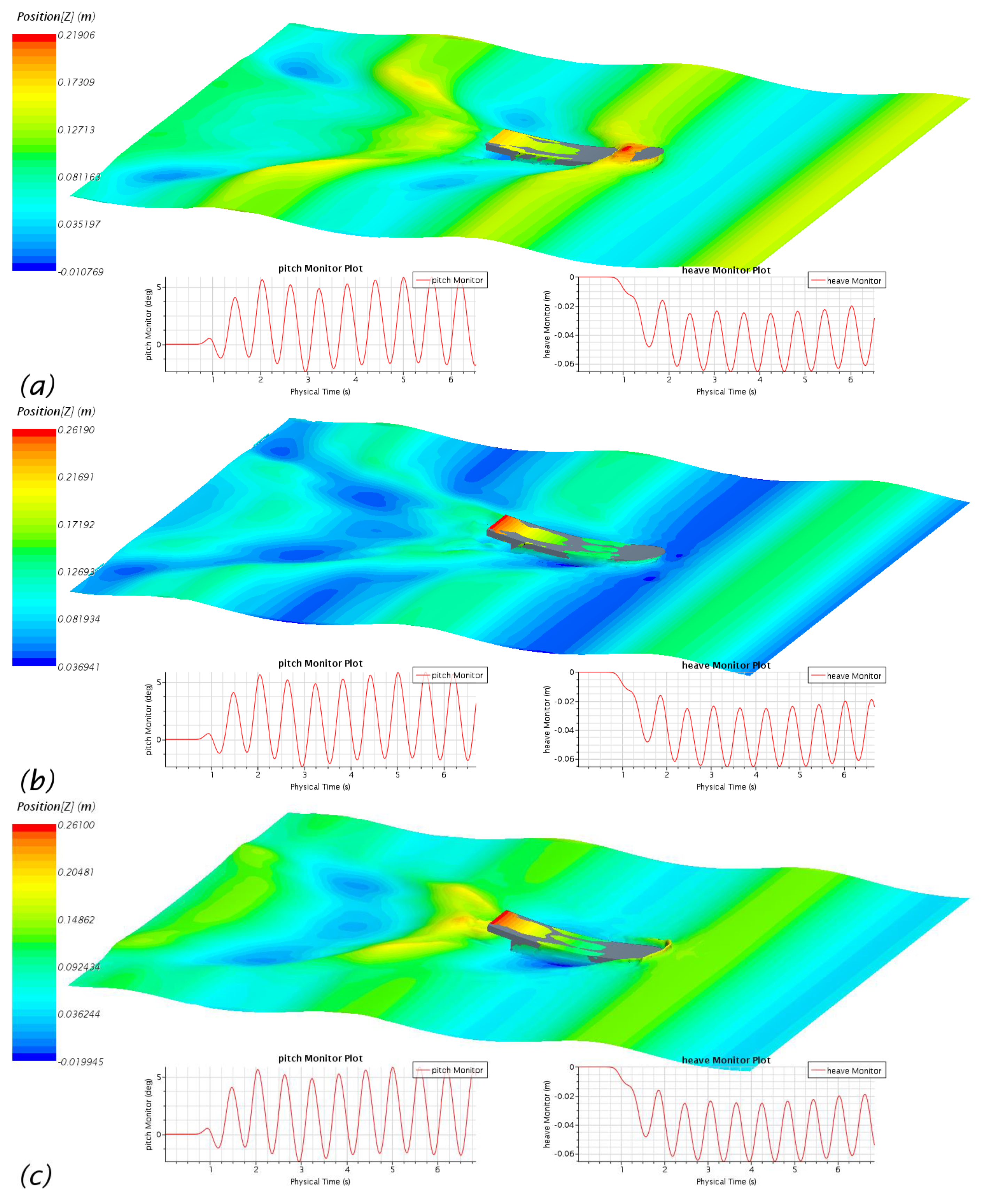
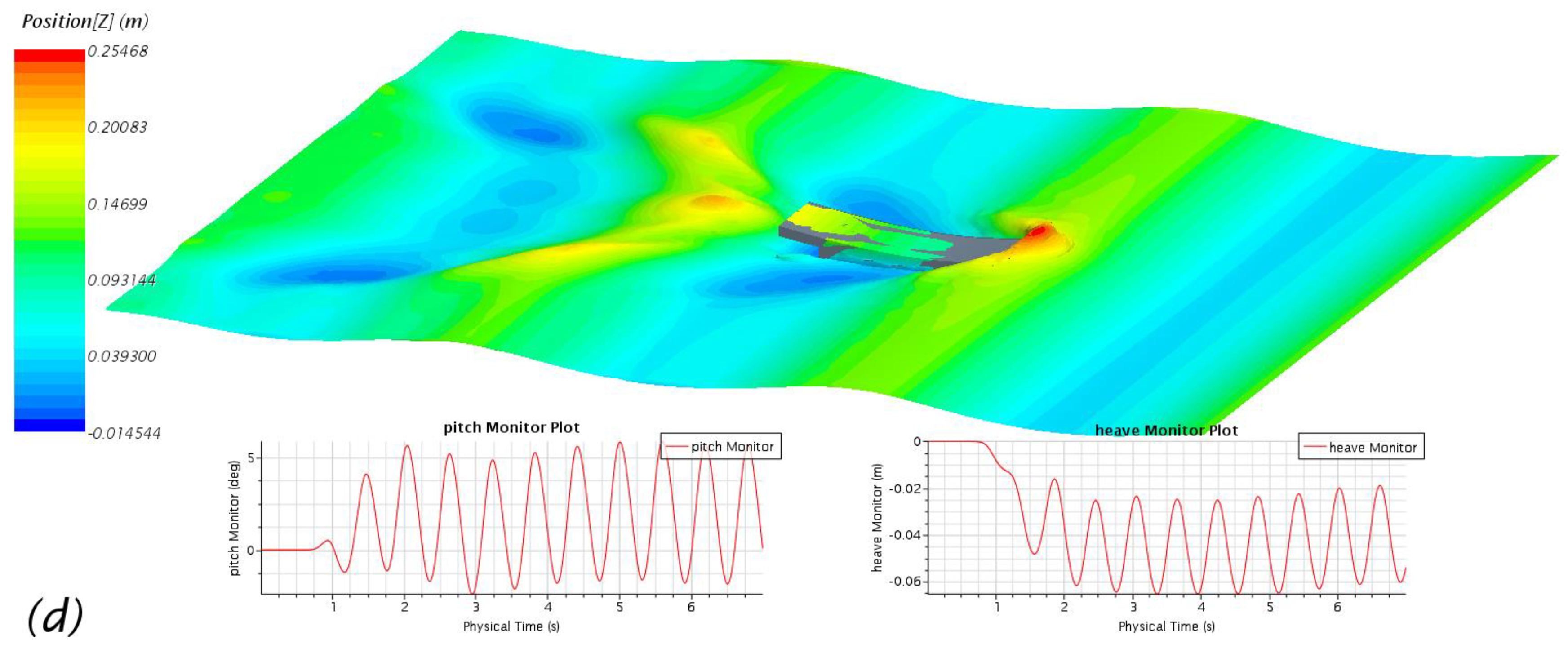
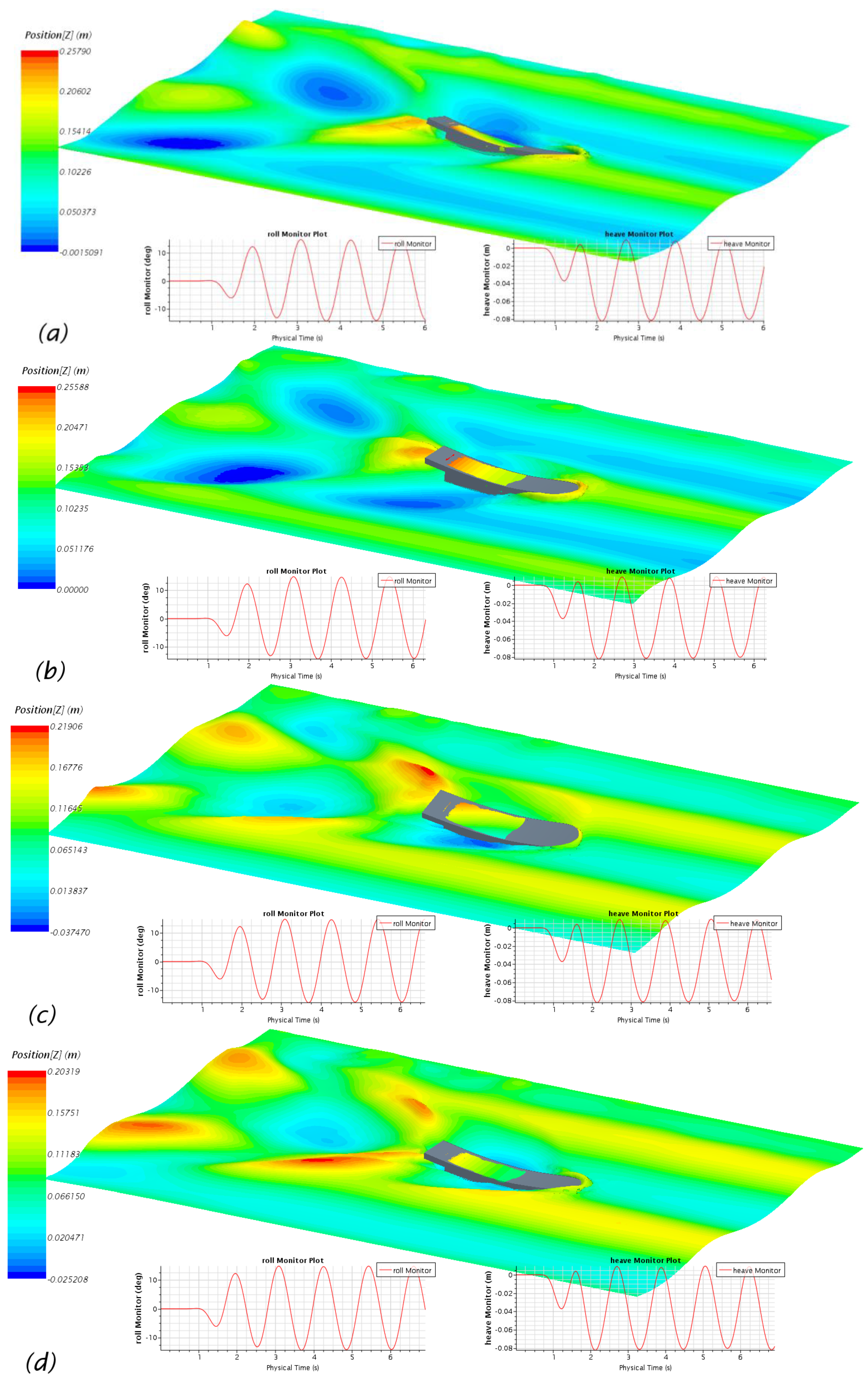
In this study, the ship motion is analyzed considering the effects of forward speed and wave height in regular waves using CFD to secure the safety of small fishing vessels; furthermore, the operational limitations of fishing vessels in actual seas are determined through statistical processes. The results of this study are expected to help operators to improve the safety performance of small fishing vessels in irregular waves.
4. Conclusions
The effects of wave height and forward speed on the seakeeping performance of a small fishing vessel in irregular waves were evaluated using CFD. Numerical calculations were performed under regular wave conditions in head sea and beam sea before analyzing the irregular waves.
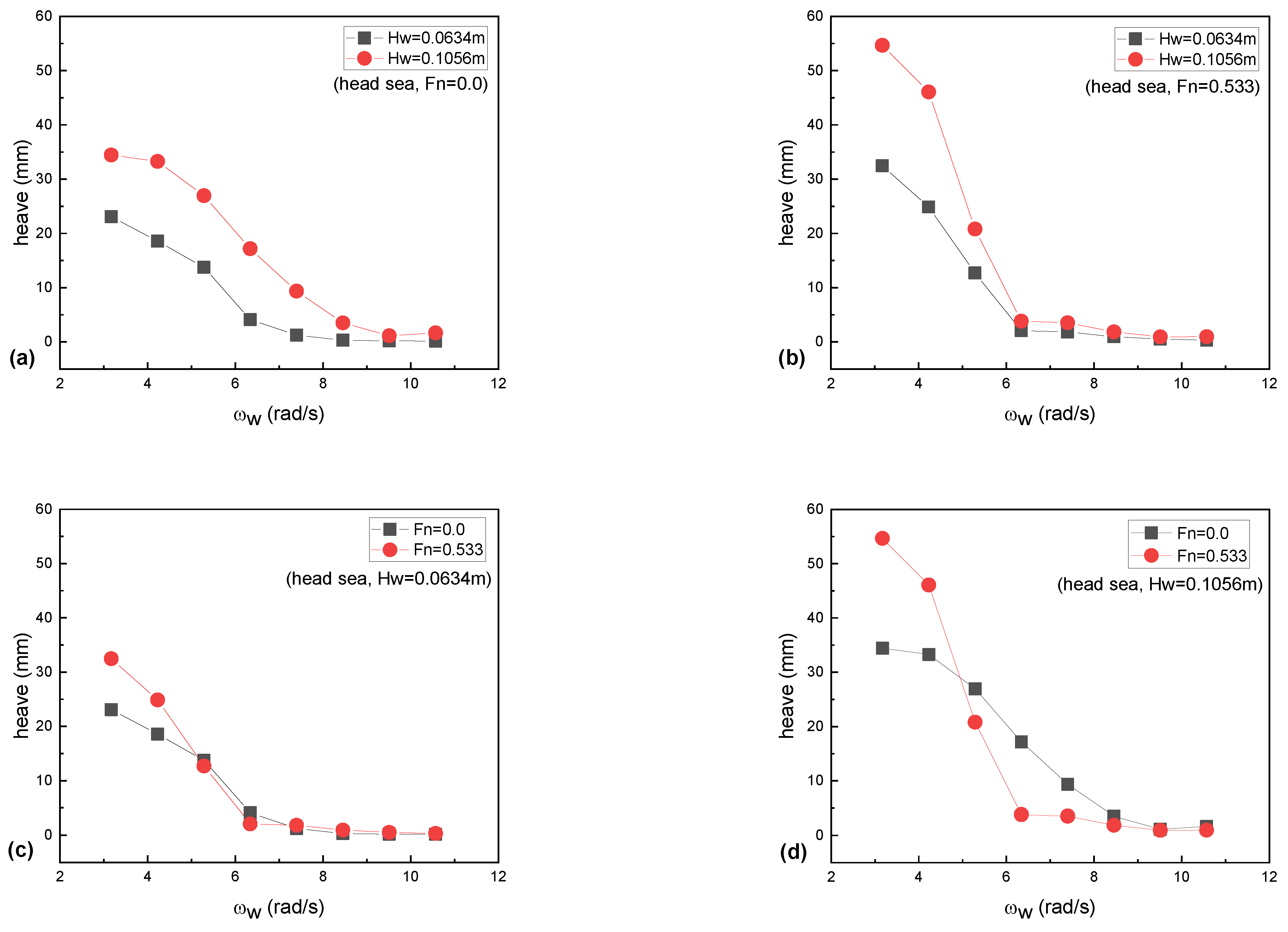
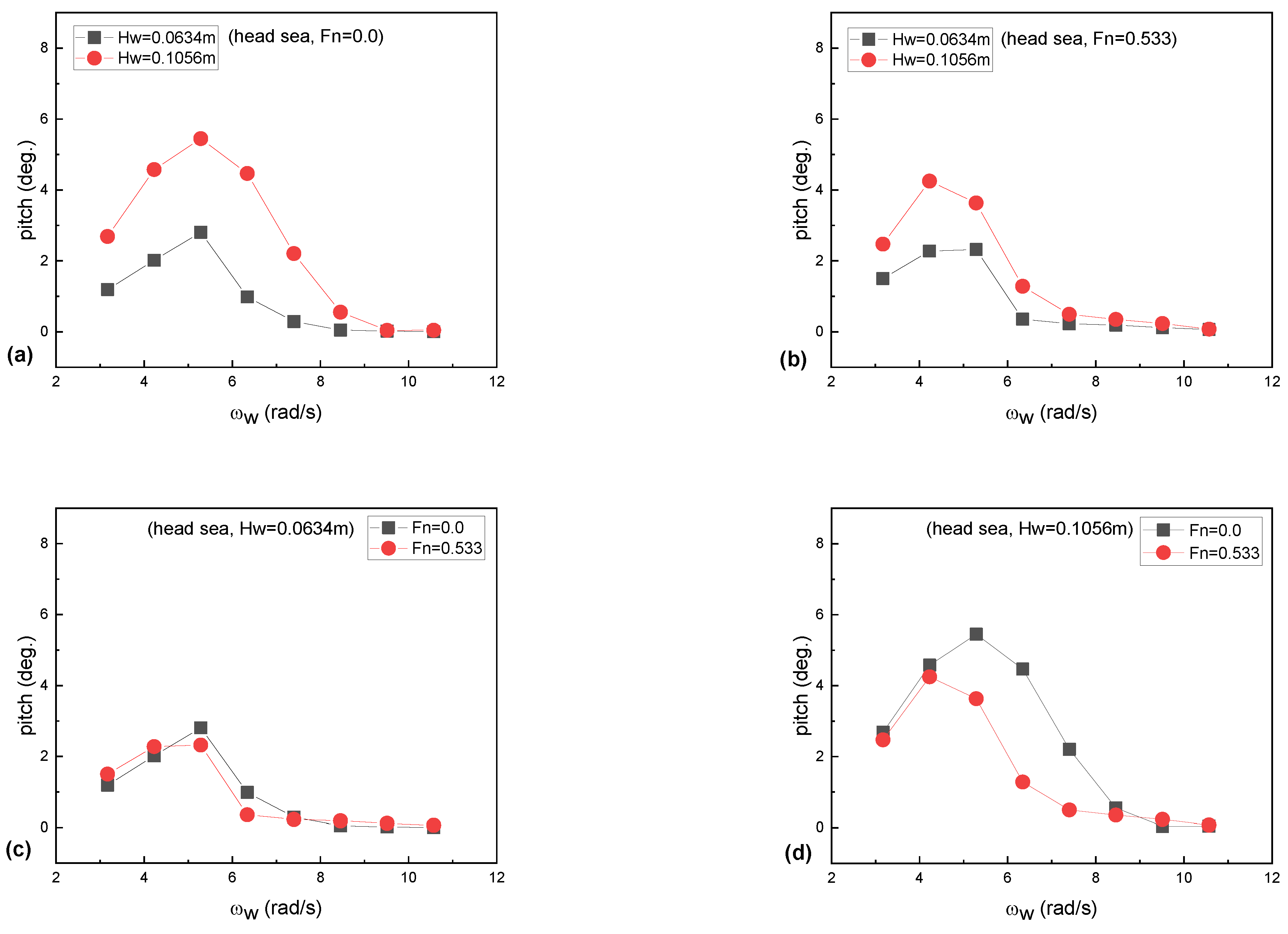
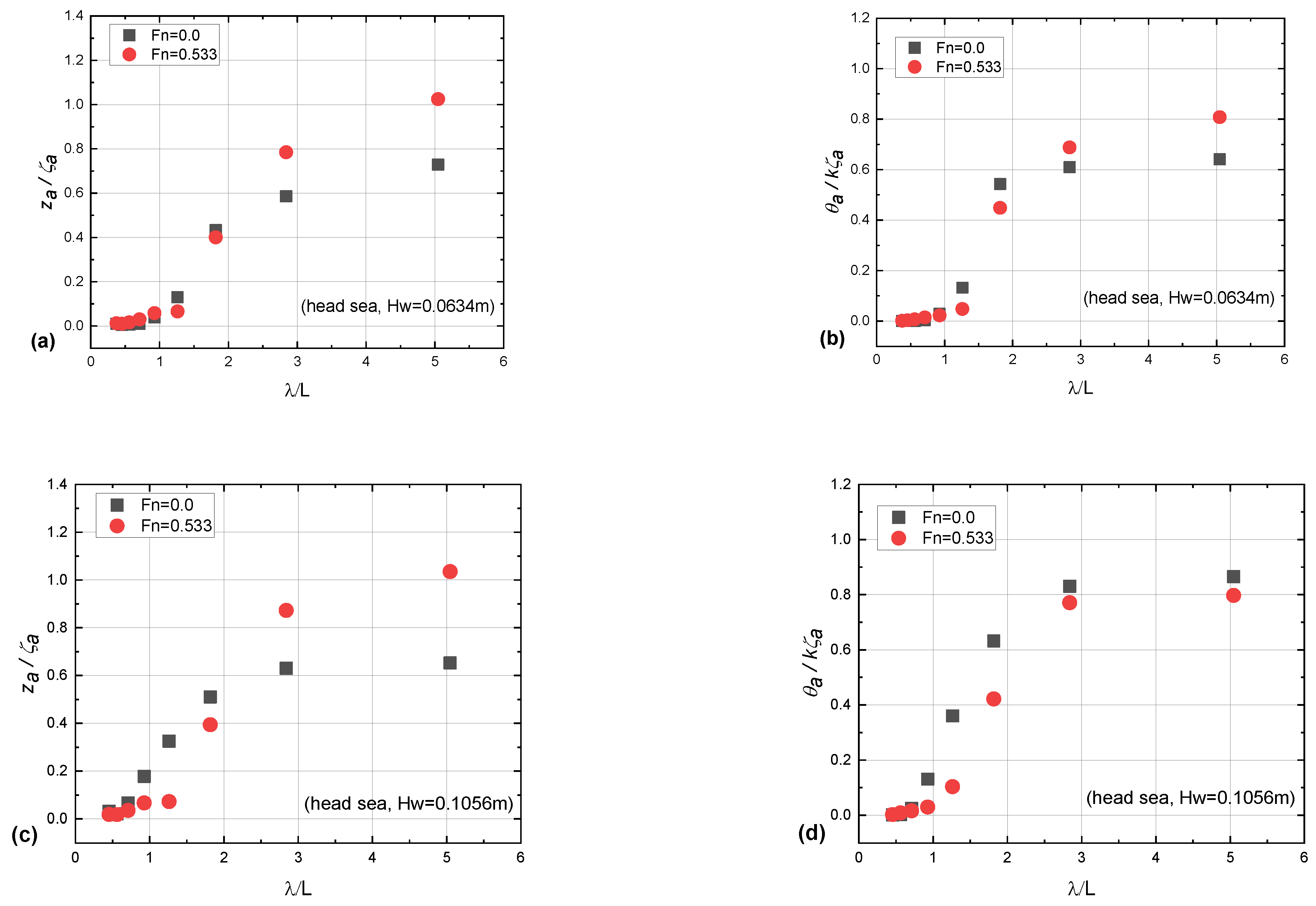
The wave height effect changed linearly for a forward speed in head sea; however, it acted non-linearly in the pitch motion in the stationary state. The effect of the speed showed a non-linear shape wherein the heave motion became larger with an increase in the forward speed in the long wavelength region.
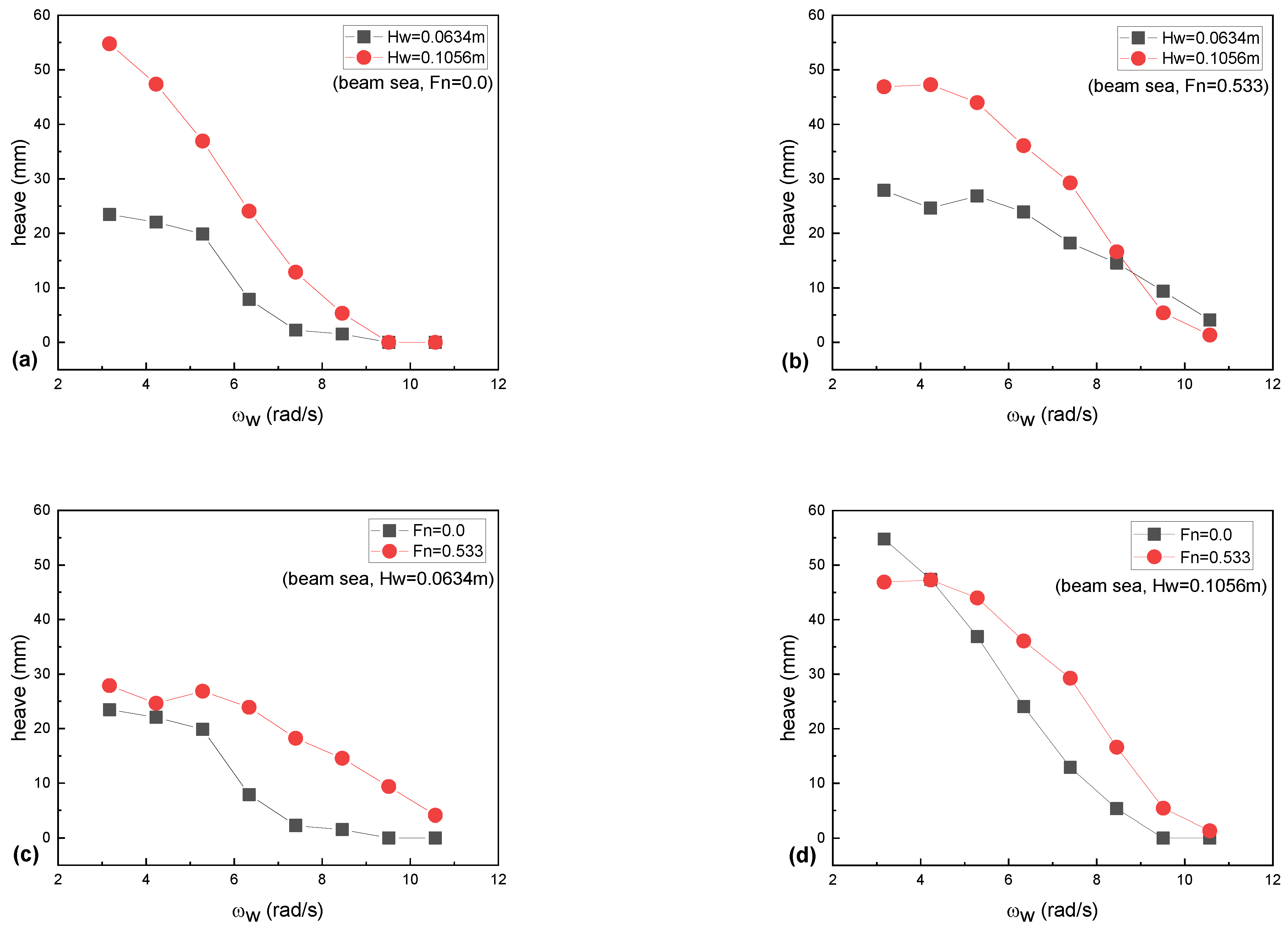
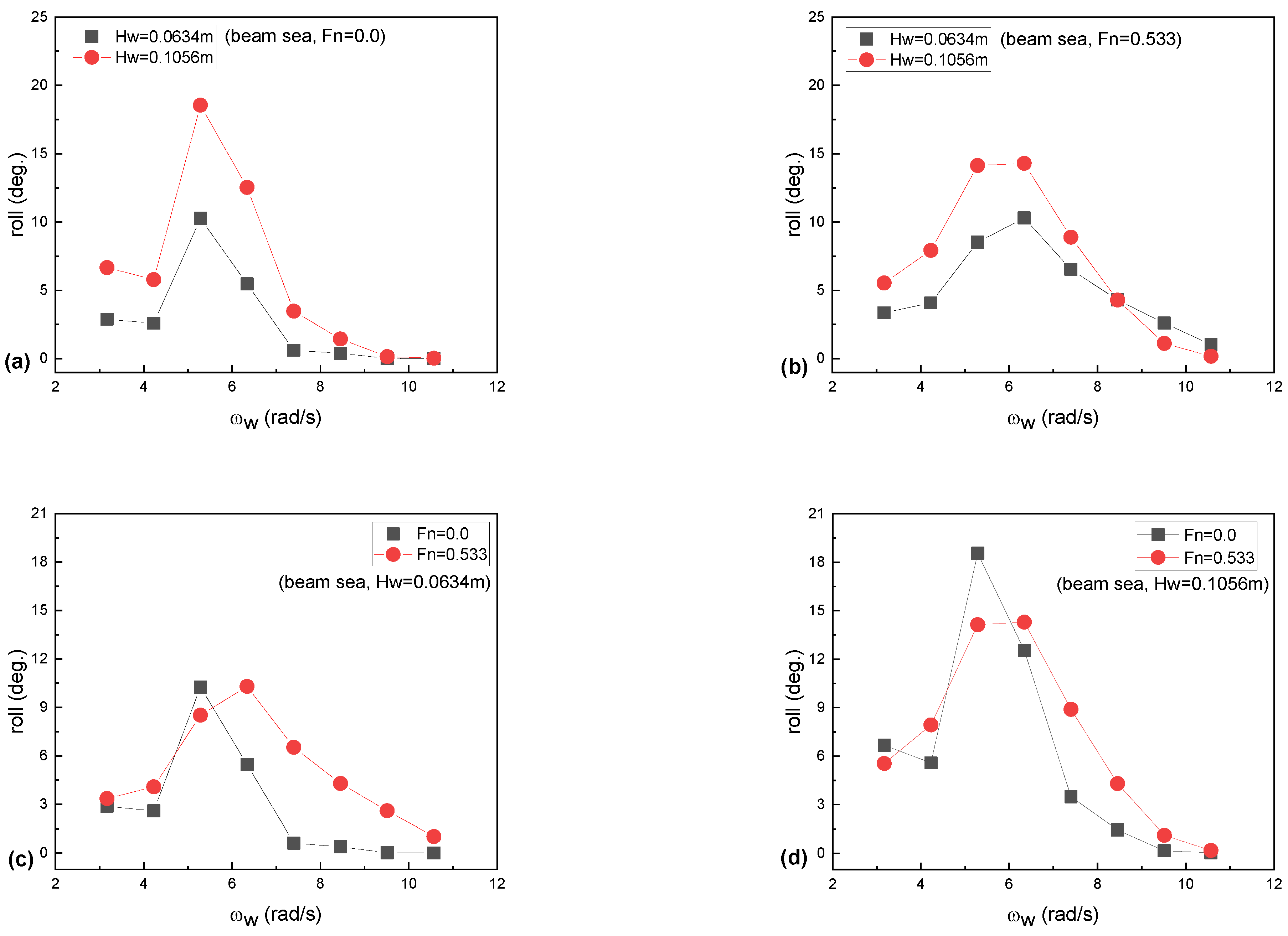
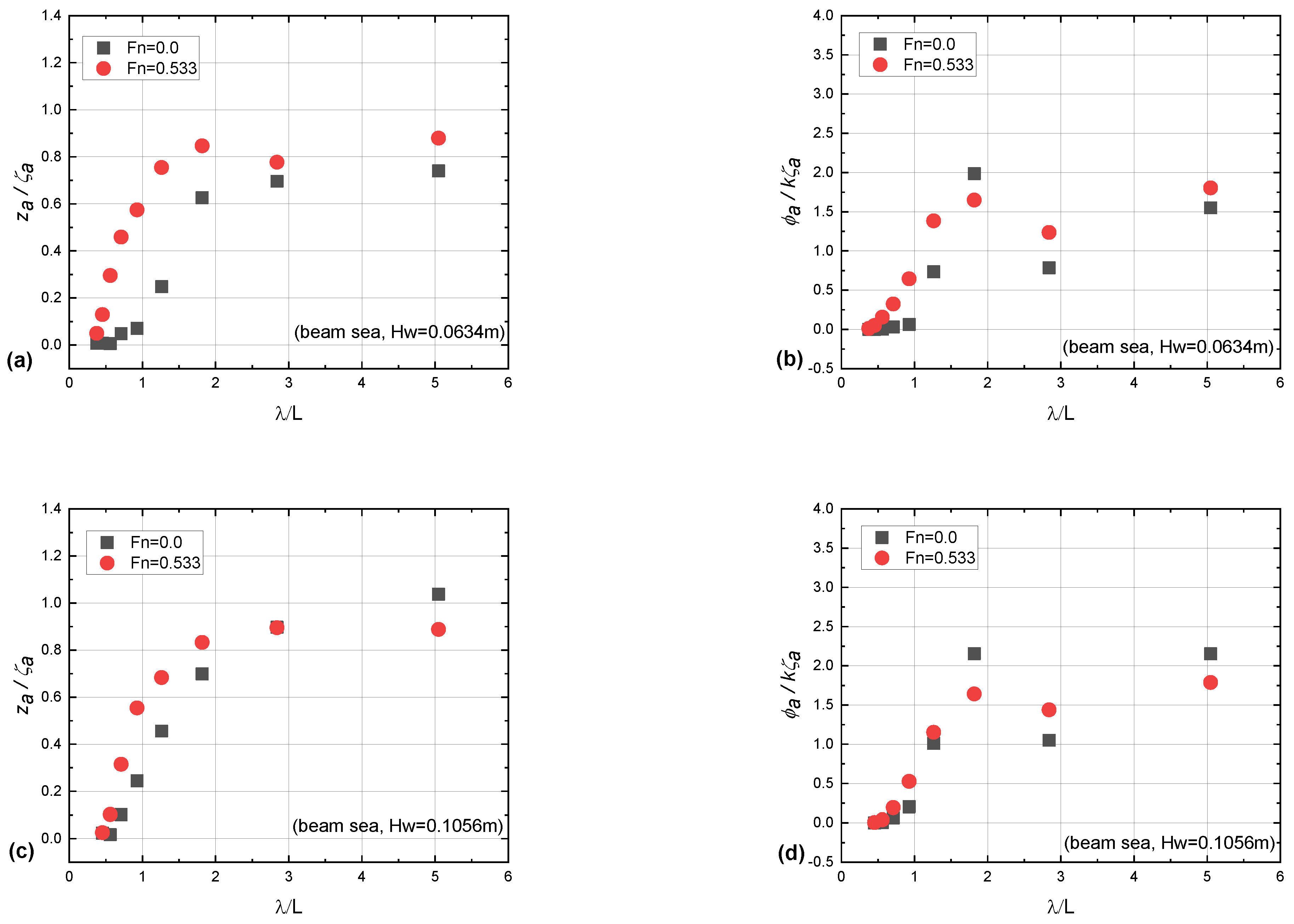
In beam sea, the wave height effect did not appear linearly when there was a forward speed; however, in the stationary state, the heave and roll motions attributed to the wave height appear nonlinearly. The effect of the forward speed was found to be greater in the heave motion than that in the roll motion.
The evaluation of the seakeeping performance in irregular waves indicated that the probability of the pitch exceeding the seakeeping limit value was evaluated as relatively small except for the stationary state at the wave height of 1 m. In the stationary state with , the probability of exceedance is about 36%. The evaluation of the seakeeping performance of the roll motion is more dangerous than the pitch motion. It is necessary to be careful as there is a high probability of exceeding the limit value in case of . GM decreases regardless of wave height and ship speed, as indicated by estimating the change in GM via the calculation of the mean roll period in irregular waves. Since the reduction rate is up to 30%, it is expected that the stability in the wave will be deteriorated.
The study should be extended to ships with bilge keels attached. Bilge keels are very effective in reducing the roll motion on small ships as well as large ships. It is expected that the evaluation of seakeeping performance will be derived differently from the bare hull condition. In addition, a follow-up study should be conducted on the characteristics of seakeeping performance according to the size of the small fishing vessel. This study was conducted on a 7-ton class vessel, and it is noted that additional simulations for vessels of different sizes will increase reliability in analyzing the operating limitations of small fishing vessels in actual seas.
In the future, a numerical analysis will be performed using diverse wave encounter angles and ship speeds. Based on these results, we will research the development of a safe navigation support system that can provide guidelines on how to deal with dangerous situations by evaluating the operational limitations in various marine environments.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}