

Turbulent Eddy Generation for the CFD Analysis of Hydrokinetic Turbines

Abstract
:1. Introduction
2. Review on Turbulence Generation Methods
2.1. Precursor Methods (PM)
2.2. Synthetic Methods (SM)
2.3. Synthetic Volume Forcing Methods (SVFM)
3. Turbulence Production and Control Methodology
- , a spatially harmonic and constant in time deterministic sine distribution, with given wavelength ,
- , a randomly fluctuating harmonic distribution obtained by introducing at each time in a random variation of the sine phase, and a spatially random perturbation of the intensity.
3.1. Turbulent Flow Metrics
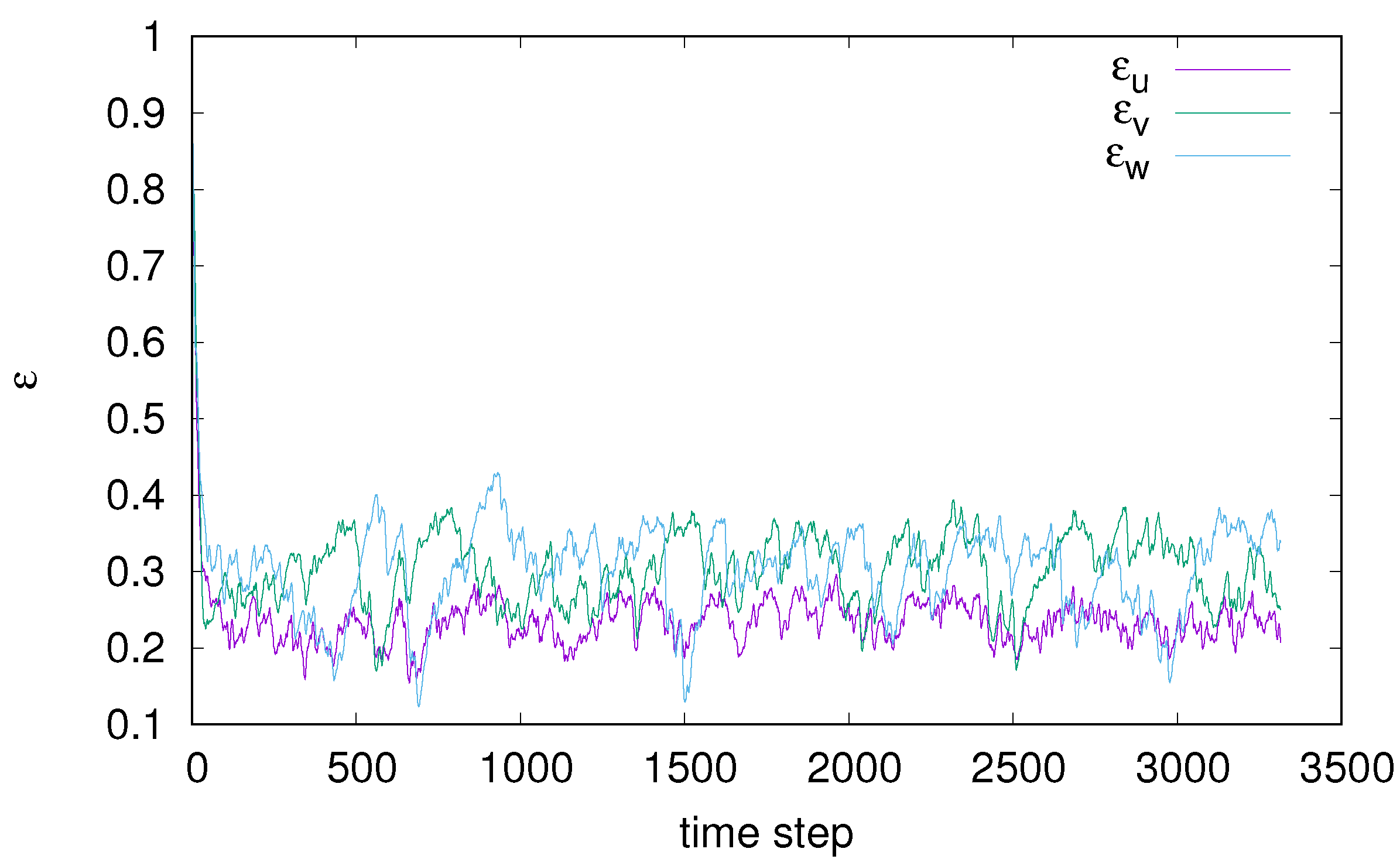
3.2. Generated Turbulence Control Strategy
4. Computational Model
5. Numerical Application
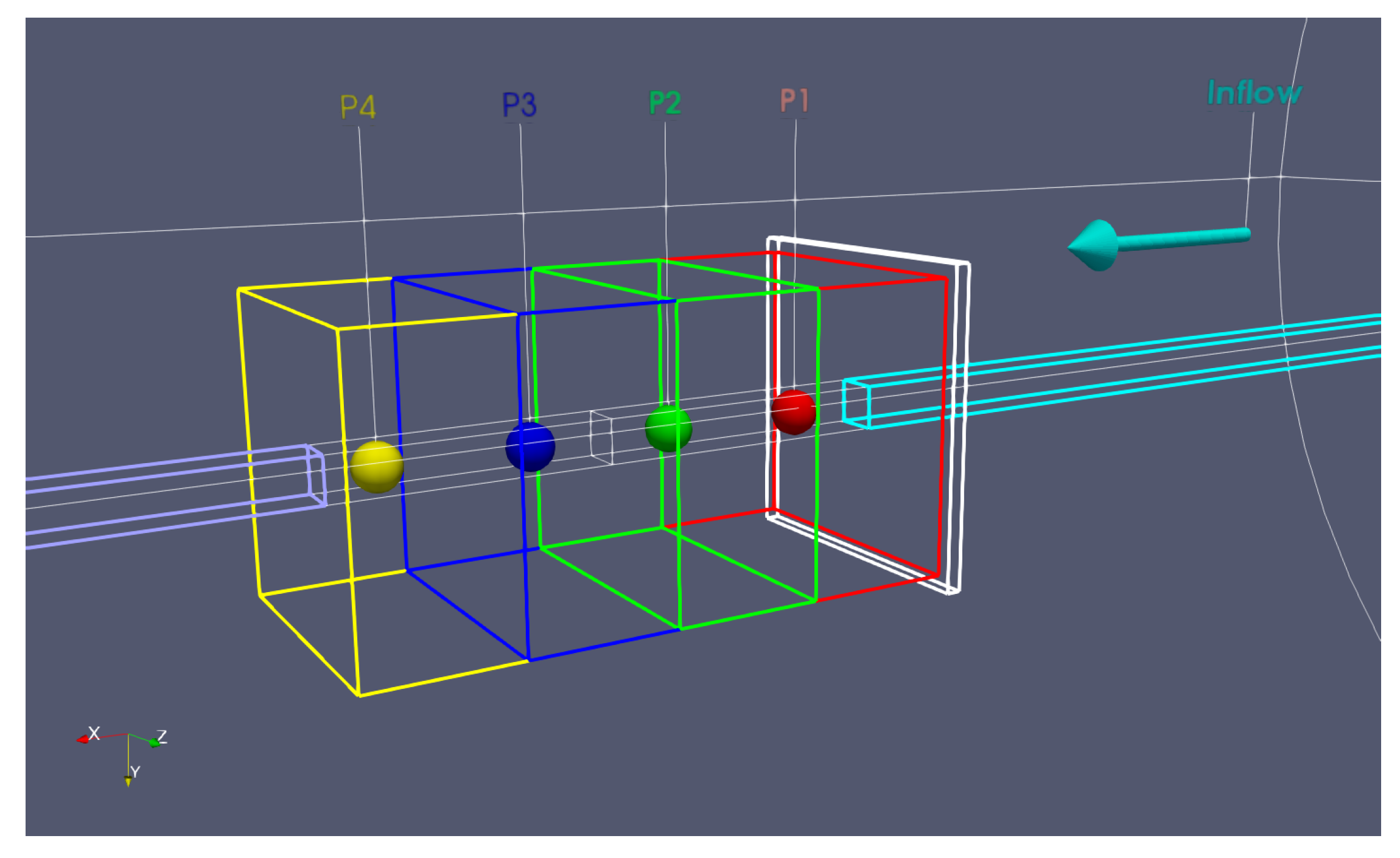
5.1. Computational Set-Up
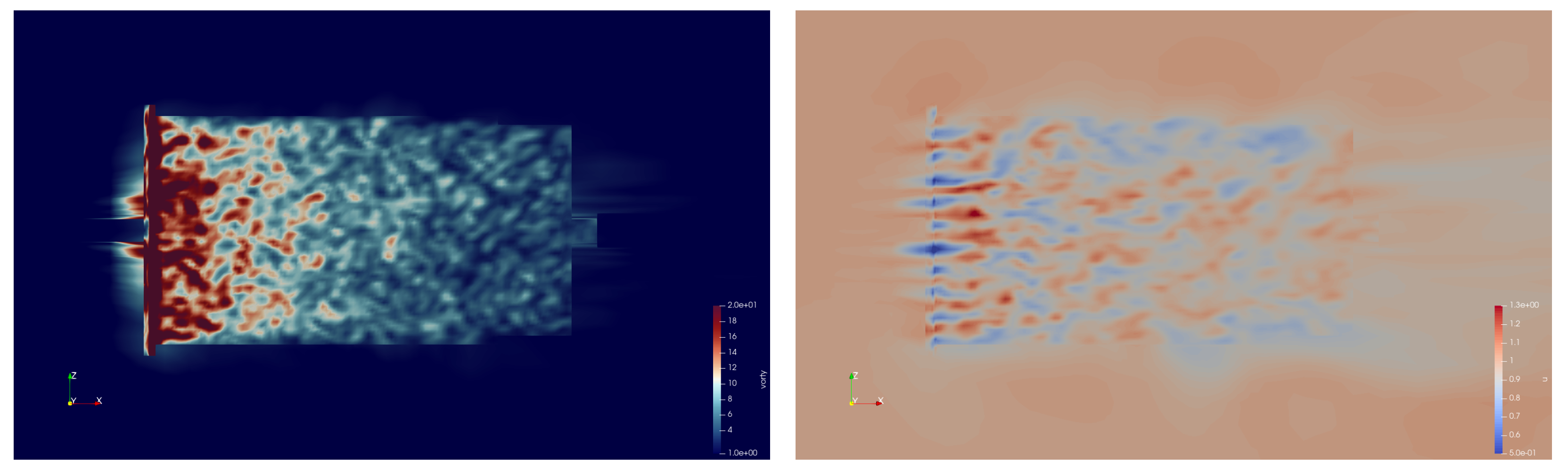
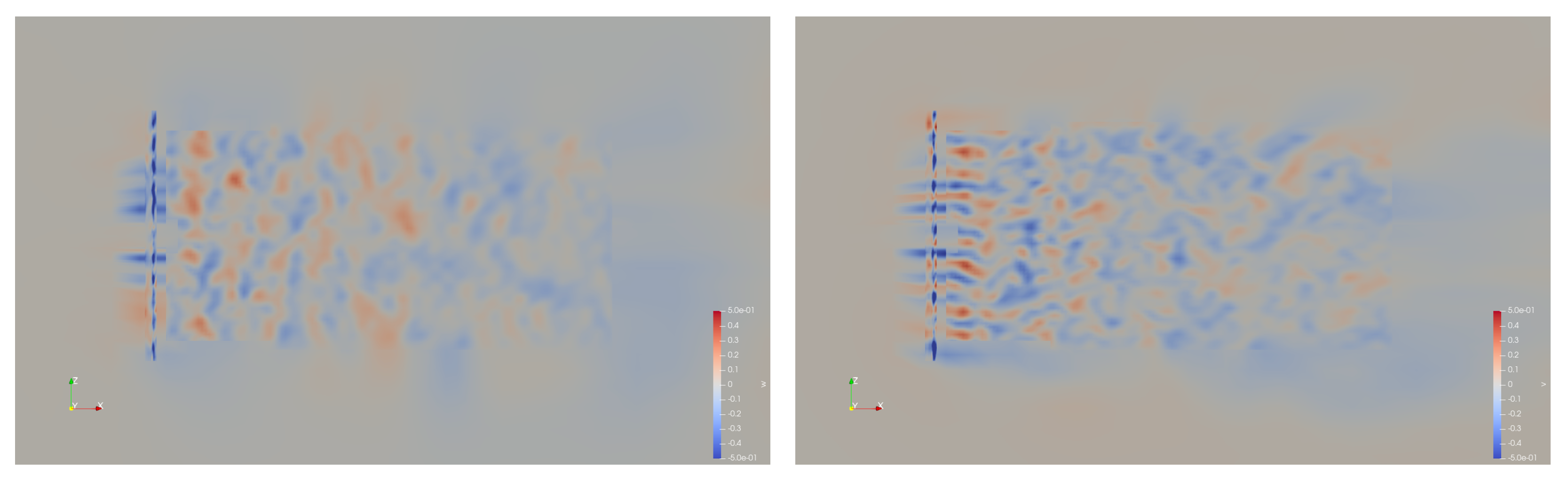
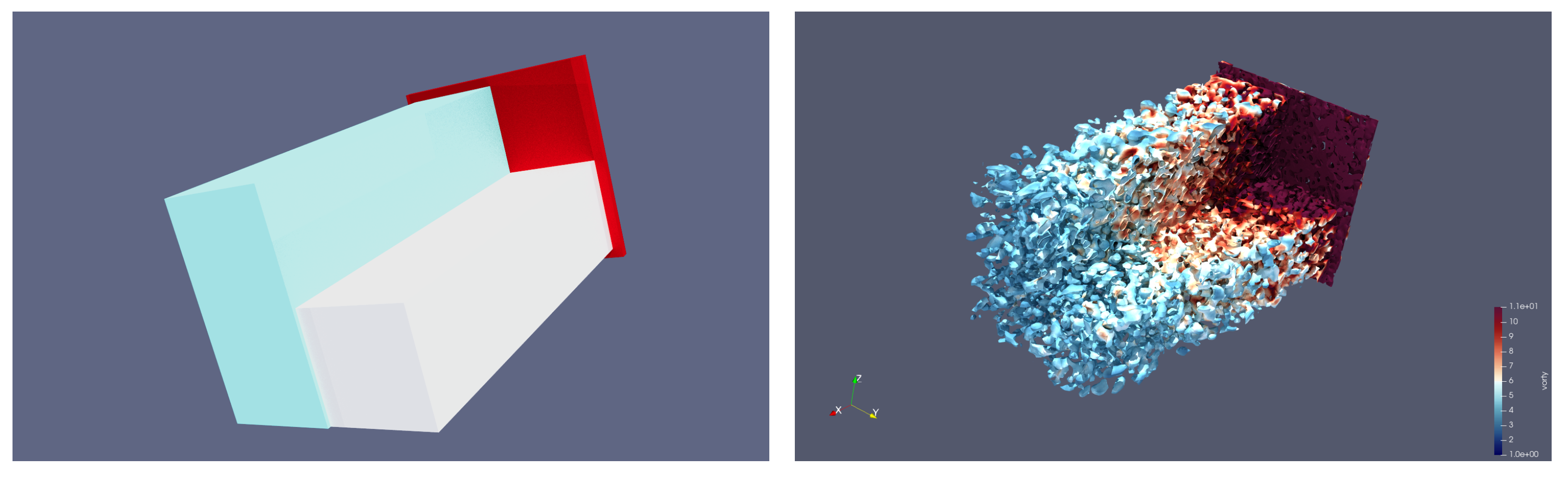
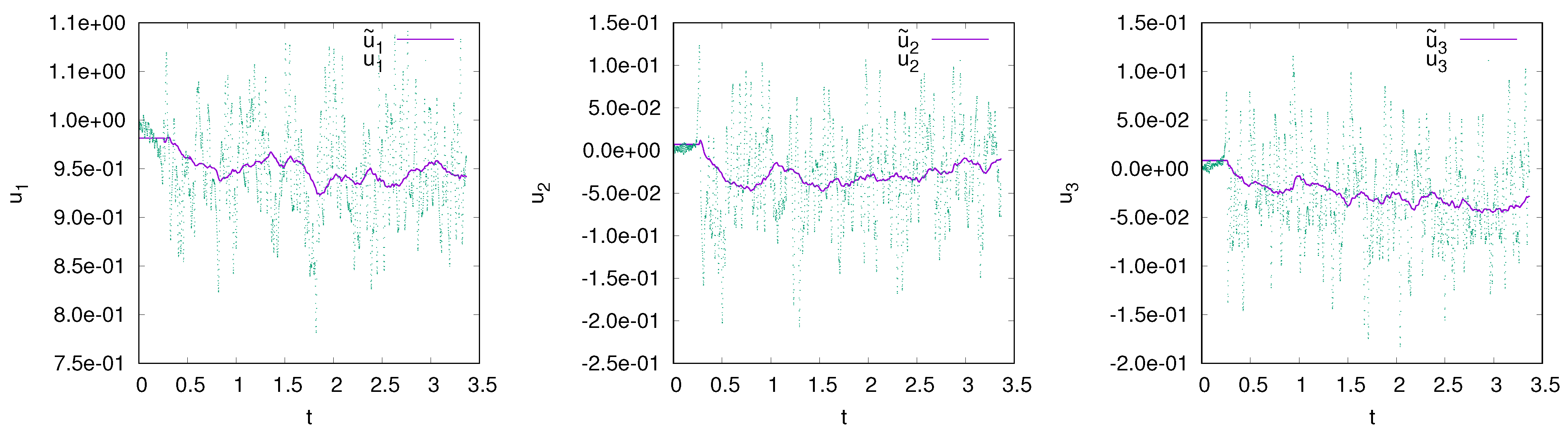
5.2. Flow Field Simulations
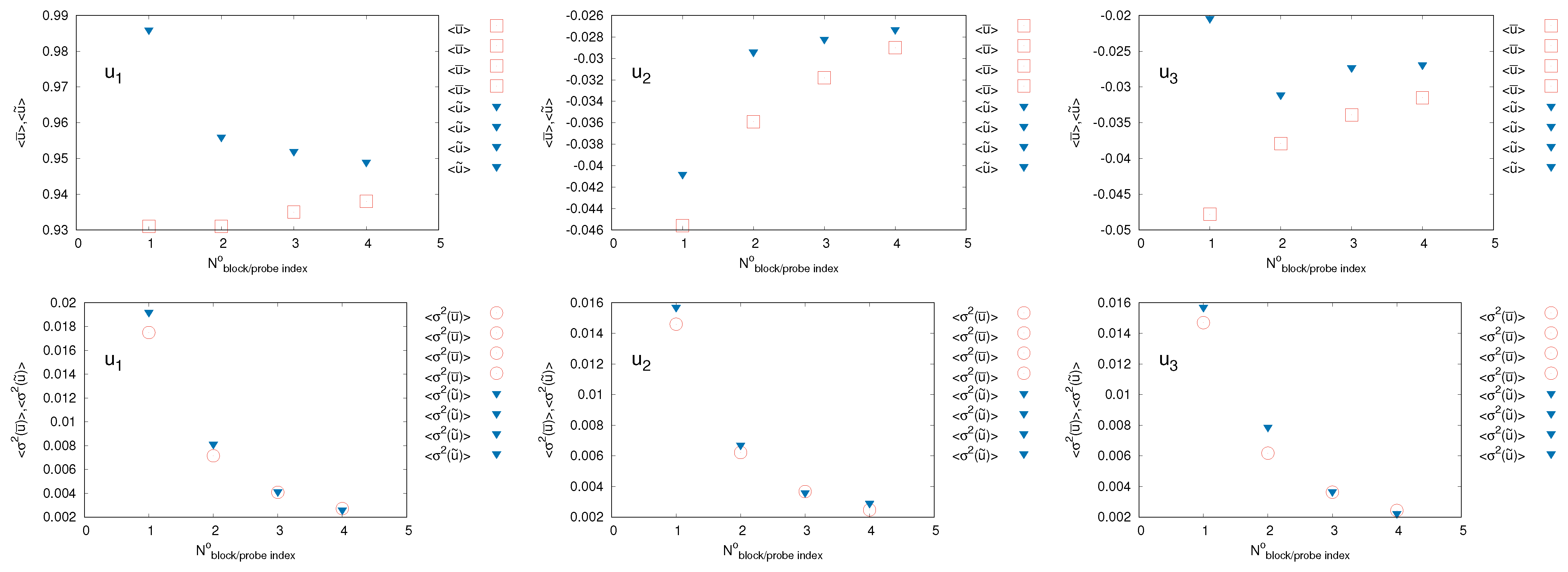
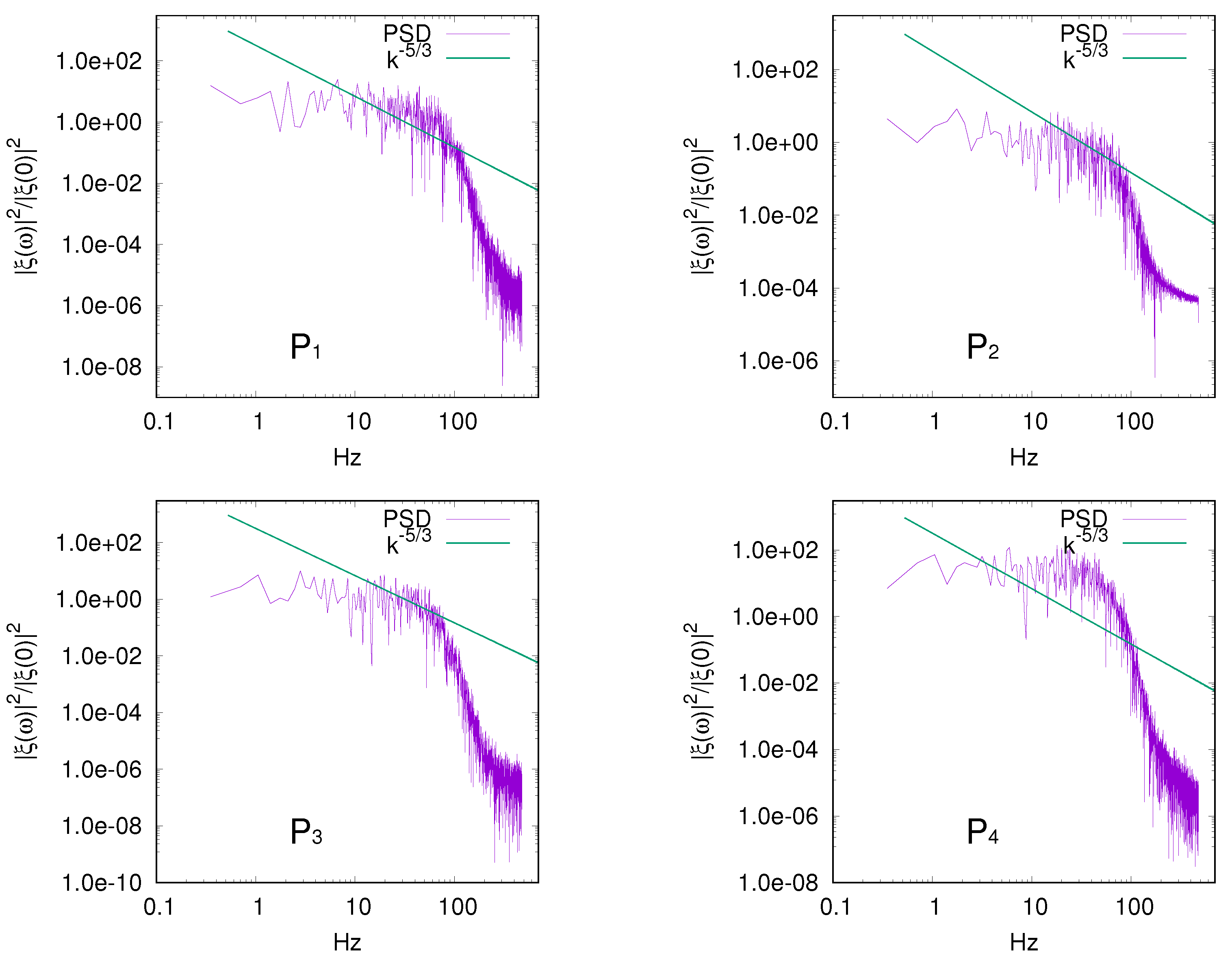
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CFL | Courant-Friedrichs-Lewy |
| DES | Detached eddy simulation |
| DNS | Direct numerical simulation |
| LES | Large eddy simulation |
| N-S | Navier–Stokes Equation |
| PM | Precursor Methods |
| PID | Proportional Integral Derivative |
| PSD | Power Spectral Density |
| Probability Density Function | |
| SM | Synthetic Method |
| SDFM | Synthetic Digital Filtering Method |
| SVFM | Synthetic Volume forcing Metho |
| SRFM | Synthetic Random Fourier Method |
Appendix A. Summary of Statistical Relationships
References
- Pecoraro, A.; Felice, F.D.; Felli, M.; Salvatore, F.; Viviani, M. An improved wake description by higher order velocity statistical moments for single screw vessel. Ocean Eng. 2015, 108, 181–190. [Google Scholar] [CrossRef]
- Gant, S.; Stallard, T. Modelling a Tidal Turbine in Unsteady Flow. In Proceedings of the 18th International Offshore and Polar Engineering Conference (ISOPE’08), Vancouver, BC, Canada, 6–11 July 2008. [Google Scholar]
- Allmark, M.; Martinez, R.; Ordonez-Sanchez, S.; Lloyd, C.; O’Doherty, T.; Germain, G.; Gaurier, B.; Johnstone, C. A Phenomenological Study of Lab-Scale Tidal Turbine Loading under Combined Irregular Wave and Shear Flow Conditions. J. Mar. Sci. Eng. 2021, 9, 593. [Google Scholar] [CrossRef]
- Togneri, M.; Pinon, G.; Carlier, C.; Choma Bex, C.; Masters, I. Comparison of synthetic turbulence approaches for blade element momentum theory prediction of tidal turbine performance and loads. Renew. Energy 2020, 145, 408–418. [Google Scholar] [CrossRef]
- Allmark, M.; Ellis, R.; Ebdon, T.; Lloyd, C.; Ordonez-Sanchez, S.; Martinez, R.; Mason-Jones, A.; Johnstone, C.; O’Doherty, T. A detailed study of tidal turbine power production and dynamic loading under grid generated turbulence and turbine wake operation. Renew. Energy 2021, 169, 1422–1439. [Google Scholar] [CrossRef]
- Sentchev, A.; Thiébaut, M.; Schmitt, F.G. Impact of turbulence on power production by a free-stream tidal turbine in real sea conditions. Renew. Energy 2020, 147, 1932–1940. [Google Scholar] [CrossRef]
- Mycek, P.; Gaurier, B.; Germain, G.; Pinon, G.; Rivoalen, E. Experimental study of the turbulence intensity effects on marine current turbines behaviour. Part II: Two interacting turbines. Renew. Energy 2014, 68, 876–8892. [Google Scholar] [CrossRef]
- Sellar, B.G.; Wakelam, G.; Sutherland, D.R.J.; Ingram, D.M.; Venugopal, V. Characterisation of Tidal Flows at the European Marine Energy Centre in the Absence of Ocean Waves. Energies 2018, 11, 176. [Google Scholar] [CrossRef]
- Sentchev, A.; Thiébaut, M.; Sylvain, G. Turbulence characterization at tidal-stream energy site in Alderney Race. In Developments in Renewable Energies Offshore; CRC Press: London, UK, 2020; pp. 616–623. [Google Scholar] [CrossRef]
- Tabor, G.; Baba-Ahmadi, M. Inlet conditions for large eddy simulation: A review. Comput. Fluids 2010, 39, 553–567. [Google Scholar] [CrossRef]
- Calcagni, D.; Salvatore, F.; Dubbioso, G.A.; Muscari, R. A Generalised Unsteady Hybrid RANSE/BEM Methodology Applied to Propeller-Rudder Flow Simulation. In Proceedings of the VII International Conference on Computational Methods in Marine Engineering (MARINE 2017), Nantes, France, 15–17 May 2017. [Google Scholar]
- Salvatore, F.; Calcagni, D.; Sarichloo, Z. Development of a Viscous/Inviscid Hydrodynamics Model for Single Turbines and Arrays. In Proceedings of the 12th European Wave and Tidal Energy Conference (EWTEC 2017), Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Gregori, M.; Calcagni, D.; Salvatore, F.; Di Felice, F.; Pereira, F.J.A.; Camussi, R. Hybrid viscous/inviscid modelling of a hydrokinetic turbine performance and wake field. In Developments in Renewable Energies Offshore; CRC Press: London, UK, 2020; pp. 553–562. [Google Scholar] [CrossRef]
- Muscari, R.; Di Mascio, A.; Verzicco, R. Modeling of vortex dynamics in the wake of a marine propeller. Comput. Fluids 2013, 73, 65–79. [Google Scholar] [CrossRef]
- Na, Y.; Moin, P. Direct numerical simulation of a separated turbulent boundary layer. J. Fluid Mech. 1998, 374, 379–405. [Google Scholar] [CrossRef]
- Wu, X.; Squires, K.D.; Lund, T.S. Large Eddy Simulation of a Spatially-Developing Boundary Layer. In Proceedings of the 1995 ACM/IEEE Conference on Supercomputing (Supercomputing ’95), San Diego, CA, USA, 3–8 December 1995; Association for Computing Machinery: New York, NY, USA, 1995. [Google Scholar] [CrossRef]
- Zhu, W.L.; Yang, Q.S.; Cao, S.Y. Applicability research on the turbulent inflow for building les simulation. Kongqi Donglixue Xuebao Acta Aerodyn. Sin. 2011, 29, 124–128. [Google Scholar]
- Rogallo, R.S.; Moin, P. Numerical Simulation of Turbulent Flows. Annu. Rev. Fluid Mech. 1984, 16, 99–137. [Google Scholar] [CrossRef]
- Adler, M.C.; Gonzalez, D.R.; Stack, C.M.; Gaitonde, D.V. Synthetic generation of equilibrium boundary layer turbulence from modeled statistics. Comput. Fluids 2018, 165, 127–143. [Google Scholar] [CrossRef]
- di Mare, L.; Klein, M.; Jones, W.P.; Janicka, J. Synthetic turbulence inflow conditions for large-eddy simulation. Phys. Fluids 2006, 18, 025107. [Google Scholar] [CrossRef]
- Kraichnan, R.H. Diffusion by a Random Velocity Field. Phys. Fluids 1970, 13, 22–31. [Google Scholar] [CrossRef]
- Wu, X. Inflow Turbulence Generation Methods. Annu. Rev. Fluid Mech. 2017, 49, 23–49. [Google Scholar] [CrossRef]
- Lee, S.; Lele, S.K.; Moin, P. Simulation of spatially evolving turbulence and the applicability of Taylor’s hypothesis in compressible flow. Phys. Fluids A Fluid Dyn. 1992, 4, 1521–1530. [Google Scholar] [CrossRef]
- Choma Bex, C.; Carlier, C.; Fur, A.; Pinon, G.; Germain, G.; Rivoalen, E. A stochastic method to account for the ambient turbulence in Lagrangian Vortex computations. Appl. Math. Model. 2020, 88, 38–54. [Google Scholar] [CrossRef]
- Rijpkema, D.; Starke, B.; Bosschers, J. Numerical simulation of propeller-hull interaction and determination of the effective wake field using a hybrid RANS-BEM approach. In Proceedings of the Third International Symposium on Marine Propulsors, Launceston, TAS, Australia, 5–8 May 2013. [Google Scholar]
- Queutey, P.; Deng, G.B.; Guilmineau, E.; Salvatore, F. A Comparison Between Full RANSE and Coupled RANSE-BEM Approaches in Ship Propulsion Performance Prediction. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013; ASME: New York, NY, USA, 2013; Volume 7. [Google Scholar] [CrossRef]
- de Laage de Meux, B.; Audebert, B.; Manceau, R.; Perrin, R. Anisotropic linear forcing for synthetic turbulence generation in large eddy simulation and hybrid RANS/LES modeling. Phys. Fluids 2015, 27, 035115. [Google Scholar] [CrossRef]
- Spille, A.; Kaltenbach, H.J. Generation of Turbulent Inflow Data with a Prescribed Shear-Stress Profile. In DNS/LES Progress and Challenges, Proceedings of the Third AFOSR International Conference on DNS/LES, Arlington, TX, USA, 5–9 August 2001; Department of Mathematics, University of Texas at Arlington: Arlington, TX, USA, 2001; pp. 319–326. [Google Scholar]
- Mullenix, N.J.; Gaitonde, D.V.; Visbal, M.R. Spatially Developing Supersonic Turbulent Boundary Layer with a Body-Force-Based Method. AIAA J. 2013, 51, 1805–1819. [Google Scholar] [CrossRef]
- Weitemeyer, S.; Reinke, N.; Peinke, J.; Hölling, M. Multi-scale generation of turbulence with fractal grids and an active grid. Fluid Dyn. Res. 2013, 45, 061407. [Google Scholar] [CrossRef]
- Houtin-Mongrolle, F.; Bricteux, L.; Benard, P.; Lartigue, G.; Moureau, V.; Reveillon, J. Actuator line method applied to grid turbulence generation for large-Eddy simulations. J. Turbul. 2020, 21, 407–433. [Google Scholar] [CrossRef]
- Tangermann, E.; Klein, M. Controlled Synthetic Freestream Turbulence Intensity Introduced by a Local Volume Force. Fluids 2020, 5, 130. [Google Scholar] [CrossRef]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Chorin, A. A computational method for solving incompressible viscous flow problems. J. Comput. Phys. 1967, 2, 12–26. [Google Scholar] [CrossRef]
- Jeong, J.; Hussain, F. On the identification of a vortex. J. Fluid Mech. 1995, 285, 69–94. [Google Scholar] [CrossRef]
- Di Mascio, A.; Broglia, R.; Muscari, R. On the application of the single-phase level set method to naval hydrodynamic flows. Comput. Fluids 2007, 36, 868–886. [Google Scholar] [CrossRef]
- Kundu, P.; Cohen, I.; Dowling, D. Fluid Mechanics, 6th ed.; Academic Press: London, UK, 2015. [Google Scholar]
- Choi, K.S.; Lumley, J.L. The return to isotropy of homogeneous turbulence. J. Fluid Mech. 2001, 436, 59–84. [Google Scholar] [CrossRef]
- Ross, S.M. Introduction to Probability and Statistics for Engineers and Scientist, 5th ed.; Academic Press: San Diego, CA, USA, 2014. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Block | Cells | |||
|---|---|---|---|---|
| Generation | 0.05 | 1.4 | 1.4 | |
| Control | 2.0 | 1.3 | 1.3 | |
| Background | 26.0 | 9.0 (radius) | – |
| Control | 0.933 | −0.0356 | −0.0378 | |
| block | 0.788 | 0.686 | 0.681 | |
| Sub | 0.931 | −0.0456 | −0.0478 | |
| block 1 | 0.174 | 0.146 | 0.146 | |
| Sub | 0.931 | −0.0359 | −0.0379 | |
| block 2 | 0.696 | 0.602 | 0.599 | |
| Sub | 0.935 | −0.0318 | −0.0339 | |
| block 3 | 0.387 | 0.347 | 0.342 | |
| Sub | 0.938 | −0.0290 | −0.0315 | |
| block 4 | 0.250 | 0.228 | 0.225 |
| Control Block | Sub-Block 1 | Sub-Block 2 | Sub-Block 3 | Sub-Block 4 |
|---|---|---|---|---|
| 14.68% | 21.59% | 13.77% | 10.37% | 8.38% |
| Probe | 0.986 | −0.041 | −0.020 | |
| 0.193 | 0.156 | 0.156 | ||
| Probe | 0.956 | −0.029 | −0.031 | |
| 0.810 | 0.672 | 0.792 | ||
| Probe | 0.952 | −0.028 | −0.027 | |
| 0.410 | 0.360 | 0.372 | ||
| Probe | 0.949 | −0.027 | −0.027 | |
| 0.260 | 0.292 | 0.221 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gregori, M.; Salvatore, F.; Camussi, R. Turbulent Eddy Generation for the CFD Analysis of Hydrokinetic Turbines. J. Mar. Sci. Eng. 2022, 10, 1332. https://doi.org/10.3390/jmse10101332
Gregori M, Salvatore F, Camussi R. Turbulent Eddy Generation for the CFD Analysis of Hydrokinetic Turbines. Journal of Marine Science and Engineering. 2022; 10(10):1332. https://doi.org/10.3390/jmse10101332
Chicago/Turabian StyleGregori, Matteo, Francesco Salvatore, and Roberto Camussi. 2022. "Turbulent Eddy Generation for the CFD Analysis of Hydrokinetic Turbines" Journal of Marine Science and Engineering 10, no. 10: 1332. https://doi.org/10.3390/jmse10101332