
Simulation Modeling of a Ship Propulsion System in Waves for Control Purposes





Abstract
:1. Introduction
2. Numerical Model of the Simulator
2.1. Ship Dynamics in Wave
2.2. Propeller Actions
2.3. Diesel Engine
2.4. Engine Controller
3. Case Study and Results
3.1. Results
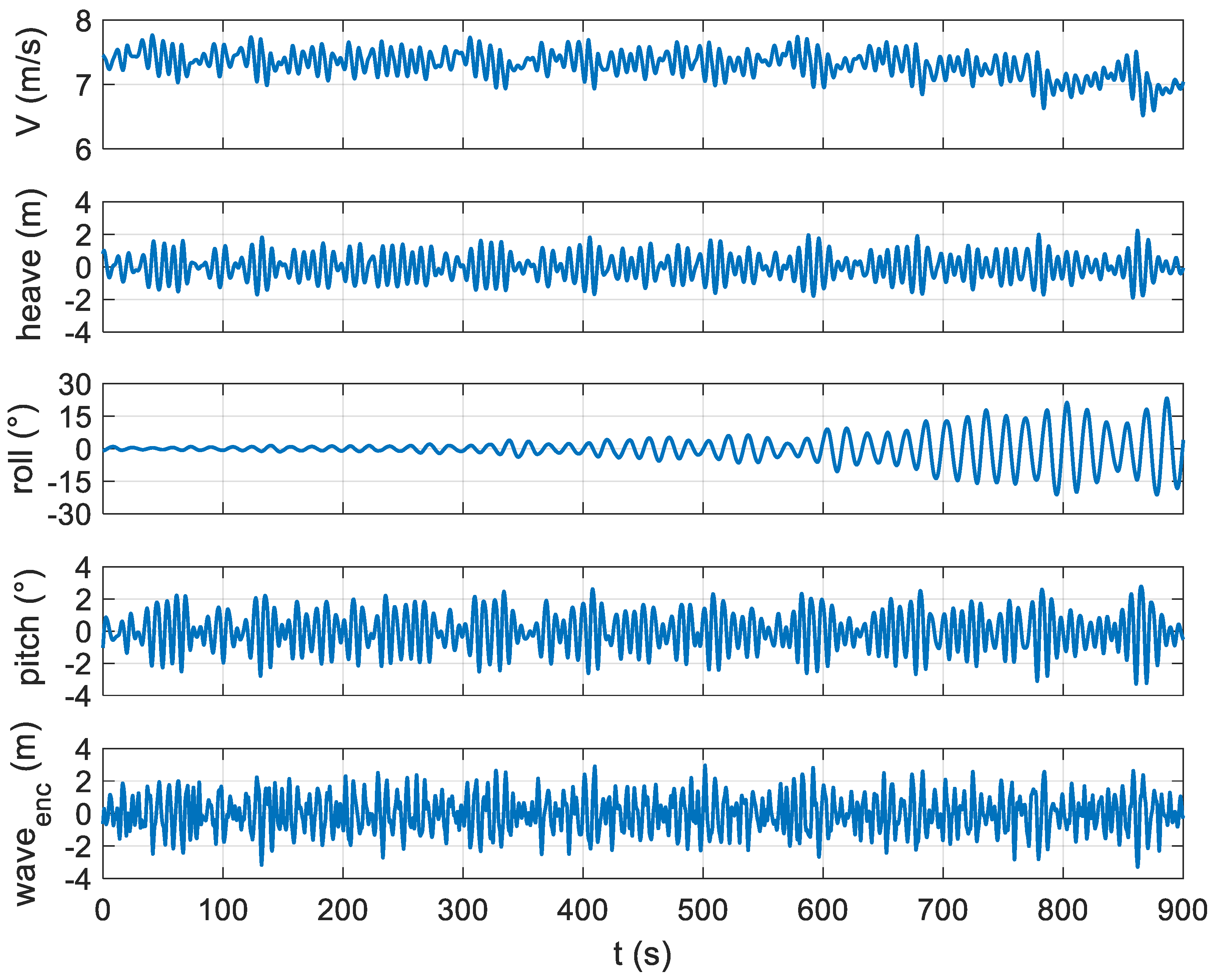
3.2. Results for Parametric Roll Scenario
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Dprop | Propeller diameter |
| h | Head of water on the propeller shaft |
| HS | Significant wave height |
| J | Advance coefficient |
| KQ | Propeller torque coefficient |
| KT | Propeller thrust coefficient |
| L | Ship length |
| Neng | Engine revolutions |
| Nprop | Propeller revolutions |
| Qeng | Engine torque |
| Qprop | Propeller torque |
| R | Propeller radius |
| SFCF | Specific fuel consumption |
| Tout | Temperature of the exhaust gases at the cylinder outlet |
| Tprop | Propeller thrust |
| TZ | Zero crossing period |
| V | Ship speed |
| waveenc | Wave profile encountered by the ship |
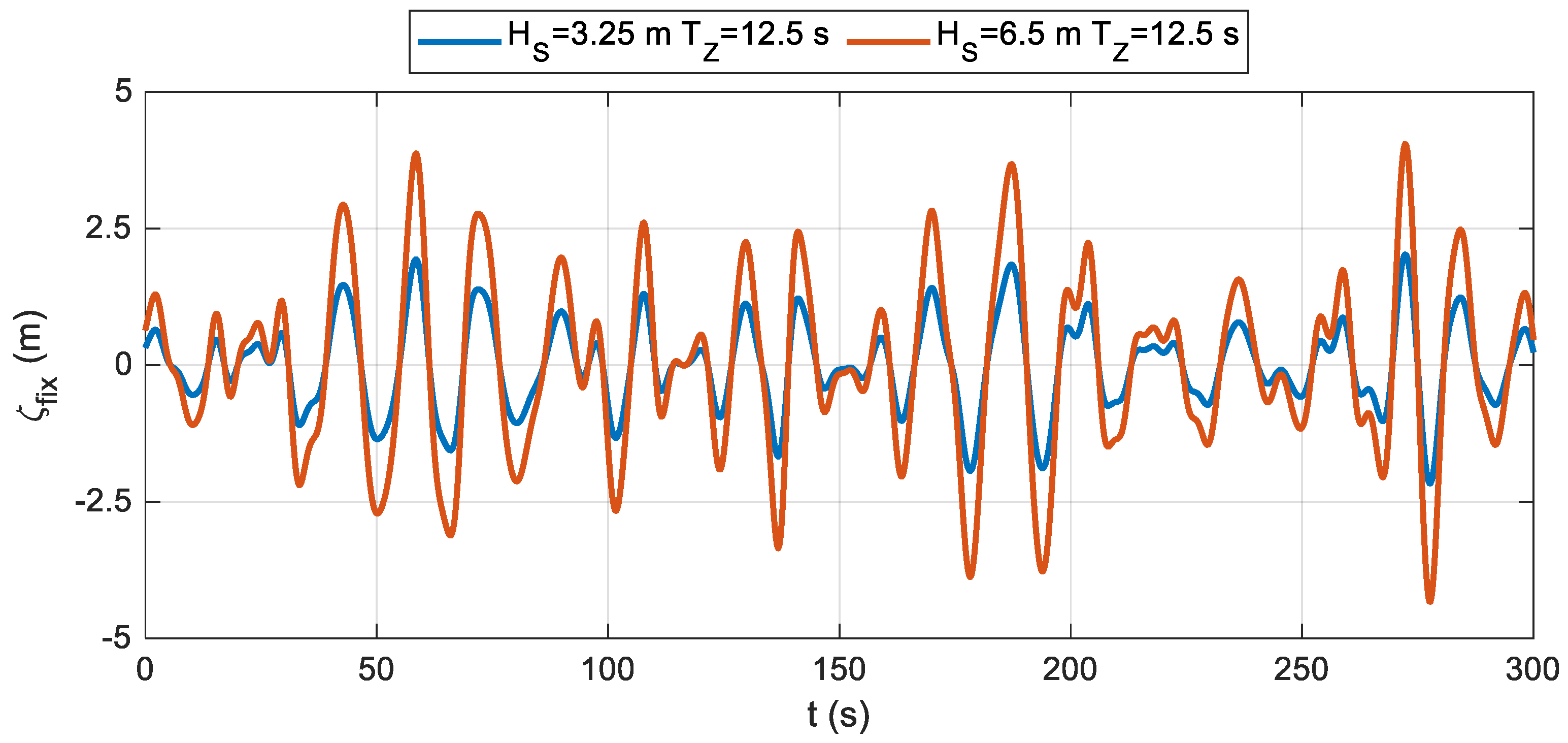
| ζfix | Wave profile in the inertial (fixed) frame |
| βqv | Torque ventilation loss factors |
| βtv | Thrust ventilation loss factors |
| λ | Wavelength |
| ρ | Density of the sea water |
References
- Okazaki, T.; Nishizaki, C. A study on situation awareness of ship maneuvering simulator training. Int. J. Emerg. Trends Eng. Technol. 2015, 3, 21–30. [Google Scholar]
- Altosole, M.; Figari, M.; Martelli, M. Time-Domain Simulation for Marine Propulsion Applications. In Proceedings of the 2012—Summer Computer Simulation Conference, SCSC 2012, Part of SummerSim 2012 Multiconference, Genova, Italy, 8–11 July 2012; Volume 44, pp. 36–43. [Google Scholar]
- Campora, U.; Figari, M. Numerical simulation of ship propulsion transients and full-scale validation. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2003, 217, 41–52. [Google Scholar] [CrossRef]
- Benvenuto, G.; Carrera, G.; Figari, M.; Campora, U. Interaction Between Ship Propulsion Plant Automation and Simulation. In Proceedings of the 12th International Congress of the International Maritime Association of the Mediterranean, IMAM 2005—Maritime Transportation and Exploitation of Ocean and Coastal Resources, Lisbon, Portugal, 26–30 September 2005; Volume 1, pp. 617–626. [Google Scholar]
- Altosole, M.; Figari, M.; Bagnasco, A.; Maffioletti, L. Design and Test of the Propulsion Control of the Aircraft Carrier “Cavour” using Real-Time Hardware in the Loop Simulation. In Proceedings of the SISO European Simulation Interoperability Workshop 2007, EURO SIW 2007, Genova, Italy, 18–20 June 2007; pp. 67–74. [Google Scholar]
- Altosole, M.; Benvenuto, G.; Figari, M.; Campora, U. Real-Time Simulation of a COGAG Naval Ship Propulsion System. In Proceedings of the 12th International Congress of the International Maritime Association of the Mediterranean, IMAM 2007—Maritime Industry, Ocean Engineering and Coastal Resources, Varna, Bulgaria, 2–6 September 2008; Volume 1, pp. 331–337. [Google Scholar]
- Altosole, M.; Dubbioso, G.; Figari, M.; Viviani, M.; Michetti, S.; Trapani, A.M. Simulation of the Dynamic Behaviour of a Codlag Propulsion Plant. In RINA, Royal Institution of Naval Architects—Warship 2010: Advanced Technologies in Naval Design and Construction, London, UK, 9–10 June 2010; The Royal Institution of Naval Architects: London, UK, 2010; pp. 109–115. [Google Scholar]
- Michetti, S.; Ratto, M.; Spadoni, A.; Figari, M.; Altosole, M.; Marcilli, G. Ship Control System Wide Integration and the use of Dynamic Simulation Techniques in the Fremm Project. In Proceedings of the International Conference on Electrical Systems for Aircraft, Railway and Ship Propulsion, ESARS 2010, Bologna, Italy, 19–21 October 2010. [Google Scholar]
- Altosole, M.; Figari, M.; Martelli, M.; Orrù, G. Propulsion Control Optimisation for Emergency Manoeuvres of Naval Vessels. In Proceedings of the INEC 2012—11th International Naval Engineering Conference and Exhibition, Edinburgh, UK, 15 May 2012. [Google Scholar]
- Altosole, M.; Figari, M.; Ferrero, C.; Giuffra, V.; Piva, L. Propulsion Retrofitting of the Tall Ship Amerigo Vespucci: Automation Design by Simulation. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, SPEEDAM 2014, Ischia, Italy, 18–20 June 2014; pp. 313–318. [Google Scholar]
- Altosole, M.; Piastra, F.; Canepa, E. Performance analysis of a motor-sailing propulsion system for control design purposes. Ships Offshore Struct. 2016, 11, 688–699. [Google Scholar] [CrossRef]
- Altosole, M.; Campora, U.; Martelli, M.; Figari, M. Performance decay analysis of a marine gas turbine propulsion system. J. Ship Res. 2014, 58, 117–129. [Google Scholar] [CrossRef]
- Altosole, M.; Campora, U.; Laviola, M.; Zaccone, R. Deterioration effects on the performance of a steam plant for the waste heat recovery from a marine diesel engine. Ships Offshore Struct. 2019, 14, 867–878. [Google Scholar] [CrossRef]
- Zaccone, R.; Altosole, M.; Figari, M.; Campora, U. Diesel Engine and Propulsion Diagnostics of a Mini-Cruise Ship by using Artificial Neural Networks. In Towards Green Marine Technology and Transport—Proceedings of the 16th International Congress of the International Maritime Association of the Mediterranean, IMAM 2015, Pula, Croatia, 21–24 September 2015; CRC Press/Balkema: Boca Raton, FL, USA, 2015; pp. 593–602. [Google Scholar]
- Campora, U.; Cravero, C.; Zaccone, R. Marine gas turbine monitoring and diagnostics by simulation and pattern recognition. Int. J. Nav. Archit. Ocean Eng. 2018, 10, 617–628. [Google Scholar] [CrossRef]
- Campora, U.; Capelli, M.; Cravero, C.; Zaccone, R. Metamodels of a gas turbine powered marine propulsion system for simulation and diagnostic purposes. J. Nav. Arch. Mar. Eng. 2015, 12, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Altosole, M.; Campora, U.; Donnarumma, S.; Zaccone, R. Simulation Techniques for Design and Control of a Waste Heat Recovery System in Marine Natural Gas Propulsion Applications. J. Mar. Sci. Eng. 2019, 7, 397. [Google Scholar] [CrossRef] [Green Version]
- Barone, G.; Buonomano, A.; Forzano, C.; Palombo, A. Implementing the dynamic simulation approach for the design and optimization of ships energy systems: Methodology and applicability to modern cruise ships. Renew. Sustain. Energy Rev. 2021, 150, 111488. [Google Scholar] [CrossRef]
- Barone, G.; Buonomano, A.; Forzano, C.; Palombo, A.; Vicidomini, M. Sustainable energy design of cruise ships through dynamic simulations: Multi-objective optimization for waste heat recovery. Energy Convers. Manag. 2020, 221, 113166. [Google Scholar] [CrossRef]
- Benvenuto, G.; Campora, U.; Carrera, G.; Casoli, P. A Two-Zone Diesel Engine model for the Simulation of Marine Propulsion Plant Transients. In Proceedings of the MARIND 98, Second International Conference on Marine Industry, Varna, Bulgaria, 28 September–2 October 1998. [Google Scholar]
- Mrzljak, V.; Medica, V.; Bukovac, O. Quasi-dimensional diesel engine model with direct calculation of cylinder temperature and pressure|Kvazi-dimenzijski model dizelskog motora s direktnim izračunom tlaka i temperature u cilindru. Tech. Gaz. 2017, 24, 681–686. [Google Scholar]
- Altosole, M.; Benvenuto, G.; Campora, U.; Laviola, M.; Zaccone, R. Simulation and performance comparison between diesel and natural gas engines for marine applications. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2017, 231, 690–704. [Google Scholar] [CrossRef]
- Altosole, M.; Campora, U.; Figari, M.; Laviola, M.; Martelli, M. A diesel engine modelling approach for ship propulsion real-time simulators. J. Mar. Sci. Eng. 2019, 7, 138. [Google Scholar] [CrossRef] [Green Version]
- Mrzljak, V.; Medica, V.; Bukovac, O. Volume agglomeration process in quasi-dimensional direct injection diesel engine numerical model. Energy 2016, 115, 658–667. [Google Scholar] [CrossRef]
- Mrzljak, V.; Žarković, B.; Poljak, I. Fuel mass flow variation in direct injection diesel engine—Influence on the change of the main engine operating parameters. Pomorstvo 2017, 31, 119–127. [Google Scholar]
- Theotokatos, G.; Stoumpos, S.; Lazakis, I.; Livanos, G. Numerical Study of a Marine Dual-Fuel Four-Stroke Engine. In Proceedings of the 3rd International Conference on Maritime Technology and Engineering, MARTECH 2016, Lisbon, Portugal, 4–6 July 2016; Volume 2, pp. 777–786. [Google Scholar]
- Tadros, M.; Ventura, M.; Guedes Soares, C. Data Driven In-Cylinder Pressure Diagram Based Optimization Procedure. J. Mar. Sci. Eng. 2020, 8, 294. [Google Scholar] [CrossRef] [Green Version]
- Mocerino, L.; Soares, C.G.; Rizzuto, E.; Balsamo, F.; Quaranta, F. Validation of an Emission Model for a Marine Diesel Engine with Data from Sea Operations. J. Mar. Sci. Appl. 2021, 20, 534–545. [Google Scholar] [CrossRef]
- Senčić, T.; Mrzljak, V.; Blecich, P.; Bonefačić, I. 2D CFD Simulation of Water Injection Strategies in a Large Marine Engine. J. Mar. Sci. Eng. 2019, 7, 296. [Google Scholar] [CrossRef] [Green Version]
- Altosole, M.; Martelli, M.; Vignolo, S. A mathematical model of the propeller pitch change mechanism for the marine propulsion control design. Sustainable Maritime Transportation and Exploitation of Sea Resources. In Proceedings of the 14th International Congress of the International Maritime Association of the Mediterranean, IMAM 2011, Genova, Italy, 13–16 September 2011; Volume 2, pp. 649–656. [Google Scholar]
- Altosole, M.; Benvenuto, G.; Figari, M. Performance Prediction of a Planing Craft by Dynamic Numerical Simulation. In Proceedings of the 7th Symposium on High Speed Marine Vehicles, 2005 Conference, HSMV 2005, Napoli, Italy, 21–23 September 2005; Volume 2005, pp. 105–111. [Google Scholar]
- Altosole, M.; Benvenuto, G.; Figari, M.; Campora, U. Dimensionless Numerical Approaches for the Performance Prediction of Marine Waterjet Propulsion Units. Int. J. Rotating Mach. 2012, 2012, 321306. [Google Scholar] [CrossRef] [Green Version]
- Altosole, M.; Donnarumma, S.; Spagnolo, V.; Vignolo, S. Marine Cycloidal Propulsion Modelling for DP Applications. In Proceedings of the 7th International Conference on Computational Methods in Marine Engineering, MARINE 2017, Rome, Italy, 29–31 May 2017; Volume 2017, pp. 206–219. [Google Scholar]
- Tavakoli, S.; Najafi, S.; Amini, E.; Dashtimansh, A. Ship acceleration motion under the action of a propulsion system: A combined empirical method for simulation and optimization. J. Mar. Eng. Technol. 2021, 20, 200–215. [Google Scholar] [CrossRef]
- Sutulo, S.; Soares, C.G. Mathematical Models for Simulation of Manoeuvring Performance of Ships. In Marine Technology and Engineering; Taylor & Francis Group: London, UK, 2011; pp. 661–698. [Google Scholar]
- Altosole, M.; Boote, D.; Brizzolara, S.; Viviani, M. Integration of numerical modeling and simulation techniques for the analysis of towing operations of cargo ships. Int. Rev. Mech. Eng. 2013, 7, 1236–1245. [Google Scholar]
- Ircani, A.; Martelli, M.; Viviani, M.; Altosole, M.; Podenzana-Bonvino, C.; Grassi, D. A simulation approach for planing boats propulsion and manoeuvrability. Trans. R. Inst. Nav. Archit. Part B Int. J. Small Cr. Technol. 2016, 158(Part B1), B-27–B-42. [Google Scholar]
- Piaggio, B.; Viviani, M.; Martelli, M.; Figari, M. Z-Drive Escort Tug manoeuvrability model and simulation. Ocean Eng. 2019, 191, 106461. [Google Scholar] [CrossRef]
- Martelli, M.; Viviani, M.; Altosole, M.; Figari, M.; Vignolo, S. Numerical modelling of propulsion, control and ship motions in 6 degrees of freedom. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2014, 228, 373–397. [Google Scholar] [CrossRef]
- Donnarumma, S.; Martelli, M.; Vignolo, S. Numerical Models for Ship Dynamic Positioning. In Proceedings of the VI International Conference on Computational Methods in Marine, Rome, Italy, 15–17 June 2015; pp. 1078–1088. [Google Scholar]
- Spanos, D.; Papanikolaou, A. International Benchmark Study on Numerical Simulation Methods for the Prediction of Parametric Rolling of Ships in Waves. NTUA-SDL Report, Rev. 4. 2009. Available online: http://old.naval.ntua.gr/sdl/sibs/intact/BENCHMARK_REPORT_NTUA-rev.1.0.pdf (accessed on 12 December 2021).
- Shigunov, V.; El Moctar, O.; Papanikolaou, A.; Potthoff, R.; Liu, S. International benchmark study on numerical simulation methods for prediction of manoeuvrability of ships in waves. Ocean Eng. 2018, 165, 365–385. [Google Scholar] [CrossRef]
- Ghaemi, M.H.; Zeraatgar, H. Analysis of hull, propeller and engine interactions in regular waves by a combination of experiment and simulation. J. Mar. Sci. Technol. 2020, 26, 257–272. [Google Scholar] [CrossRef]
- Benvenuto, G.; Campora, U.; Carrera, G.; Figari, M. Simulation of Ship Propulsion Plant Dynamics in Rough Sea. In Proceedings of the 8th International Conference on Marine Engineering Systems (ICMES 2000), New York, NY, USA, 22–23 May 2000. [Google Scholar]
- Saettone, S.; Tavakoli, S.; Taskar, B.; Jensen, M.V.; Pedersen, E.; Schramm, J.; Steen, S.; Andersen, P. The importance of the engine-propeller model accuracy on the performance prediction of a marine propulsion system in the presence of waves. Appl. Ocean Res. 2020, 103, 102320. [Google Scholar] [CrossRef]
- Tavakoli, S.; Saettone, S.; Steen, S.; Andersen, P.; Schramm, J.; Pedersen, E. Modeling and analysis of performance and emissions of marine lean-burn natural gas engine propulsion in waves. Appl. Energy 2020, 279, 115904. [Google Scholar] [CrossRef]
- Matusiak, J. Dynamics of a Rigid Ship; Aalto University Publication Series: Espoo, Finland, 2013. [Google Scholar]
- Matusiak, J. On the non-linearities of ship’s restoring and the Froude-Krylov wave load part. Int. J. Nav. Archit. Ocean. Eng. 2010, 3, 151–159. [Google Scholar]
- Acanfora, M.; Rizzuto, E. Time domain predictions of inertial loads on a drifting ship in irregular beam waves. Ocean Eng. 2019, 174, 135–147. [Google Scholar] [CrossRef]
- Acanfora, M.; Balsamo, F. The Smart Detection of Ship Severe Roll Motions and Decision-Making for Evasive Actions. J. Mar. Sci. Eng. 2020, 8, 415. [Google Scholar] [CrossRef]
- Taimuri, G.; Matusiak, J.; Mikkola, T.; Kujala, P.; Hirdaris, S. A 6-DoF maneuvering model for the rapid estimation of hydrodynamic actions in deep and shallow waters. Ocean Eng. 2020, 218, 108103. [Google Scholar] [CrossRef]
- Acanfora, M.; Montewka, J.; Hinz, T.; Matusiak, J. Towards realistic estimation of ship excessive motions in heavy weather. A case study of a containership in the Pacific Ocean. Ocean Eng. 2017, 138, 140–150. [Google Scholar] [CrossRef]
- Benvenuto, G.; Campora, U.; Laviola, M.; Terlizzi, G. Simulation Model of a Dual-Fuel Four Stroke Engine for Low Emission Ship Propulsion Applications. Int. Rev. Mech. Eng. 2017, 11, 817–824. [Google Scholar] [CrossRef]
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1990; Volume 1. [Google Scholar]
- Yu, J.-W.; Lee, C.-M.; Choi, J.-E.; Lee, I. Effect of ship motions on added resistance in regular head waves of KVLCC2. Ocean Eng. 2017, 146, 375–387. [Google Scholar] [CrossRef]
- Kim, D.J.; Yun, K.; Park, J.-Y.; Yeo, D.J.; Kim, Y.G. Experimental investigation on turning characteristics of KVLCC2 tanker in regular waves. Ocean Eng. 2019, 175, 197–206. [Google Scholar] [CrossRef]
- Smogeli, O.N. Control of Marine Propellers from Normal to Extreme Conditions. Ph.D. Thesis, Faculty of Engineering Science and Technology, Trondheim, Norway, 2006. [Google Scholar]
- Matusiak, J.; Stigler, C. Ship Roll Motion in Irregular Waves During a Turning Circle Maneuver. In Proceedings of the 11th International Conference on Stability of Ships and Ocean Vehicles, Athens, Greece, 23–28 September 2012; pp. 291–298. [Google Scholar]
- Barnitsas, M.M.; Ray, D.; Kinley, P. Kt, Kq and Efficiency Curves for the Wageningen B-Series Propellers; University of Michigan: Ann Arbor, MI, USA, 1981. [Google Scholar]
- MAN. MAN 51/60 DF IMO TIER II/IMO TIER III. In Project Guide—Marine; MAN: Augsburg, Germany, 2015. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| λ/L | Exp (Knots) | Sim (Knots) | Error (Knots) | Err % |
|---|---|---|---|---|
| 0.5 | 12.1 | 15.3 | 3.2 | 26% |
| 0.7 | 10.9 | 15.1 | 4.2 | 39% |
| 1 | 8.6 | 9.5 | 0.9 | 10% |
| 1.2 | 10.2 | 9.2 | −1 | −10% |
| 1.5 | 12.6 | 11.6 | −1 | −8% |
| Hull Seatech-D | |
| Length between perpendiculars, L (m) | 158.00 |
| Breadth, B (m) | 25.00 |
| Depth, D (m) | 15.00 |
| Draft forward, TF (m) | 6.10 |
| Draft aft, TA (m) | 6.10 |
| Displacement, Δ (tons) | 13,766 |
| Center of gravity above the keel, KG (m) | 11.834 |
| Long. coordinate of the center of gravity from aft perpendicular, LCG (m) | 74.77 |
| Transv. radius of gyration in air, kXX (m) | 10.06 |
| Long. radius of gyration in air, kYY (m) | 39.36 |
| Propeller Wageningen B-series | |
| Number of blades Z | 4 |
| Ae/A0 | 0.750 |
| Dprop (m) | 4.8 |
| P/Drop | 1.2 |
| Engine | |
| Number of cylinders | 12 |
| Bore (m) | 0.51 |
| Stroke (m) | 0.60 |
| Engine revolution Neng (rpm) | 514 |
| Engine power PB (MW) | 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Acanfora, M.; Altosole, M.; Balsamo, F.; Micoli, L.; Campora, U. Simulation Modeling of a Ship Propulsion System in Waves for Control Purposes. J. Mar. Sci. Eng. 2022, 10, 36. https://doi.org/10.3390/jmse10010036
Acanfora M, Altosole M, Balsamo F, Micoli L, Campora U. Simulation Modeling of a Ship Propulsion System in Waves for Control Purposes. Journal of Marine Science and Engineering. 2022; 10(1):36. https://doi.org/10.3390/jmse10010036
Chicago/Turabian StyleAcanfora, Maria, Marco Altosole, Flavio Balsamo, Luca Micoli, and Ugo Campora. 2022. "Simulation Modeling of a Ship Propulsion System in Waves for Control Purposes" Journal of Marine Science and Engineering 10, no. 1: 36. https://doi.org/10.3390/jmse10010036