
V-Shaped Toothed Roller Cotton Stalk Puller: Numerical Modeling and Field-Test Validation

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
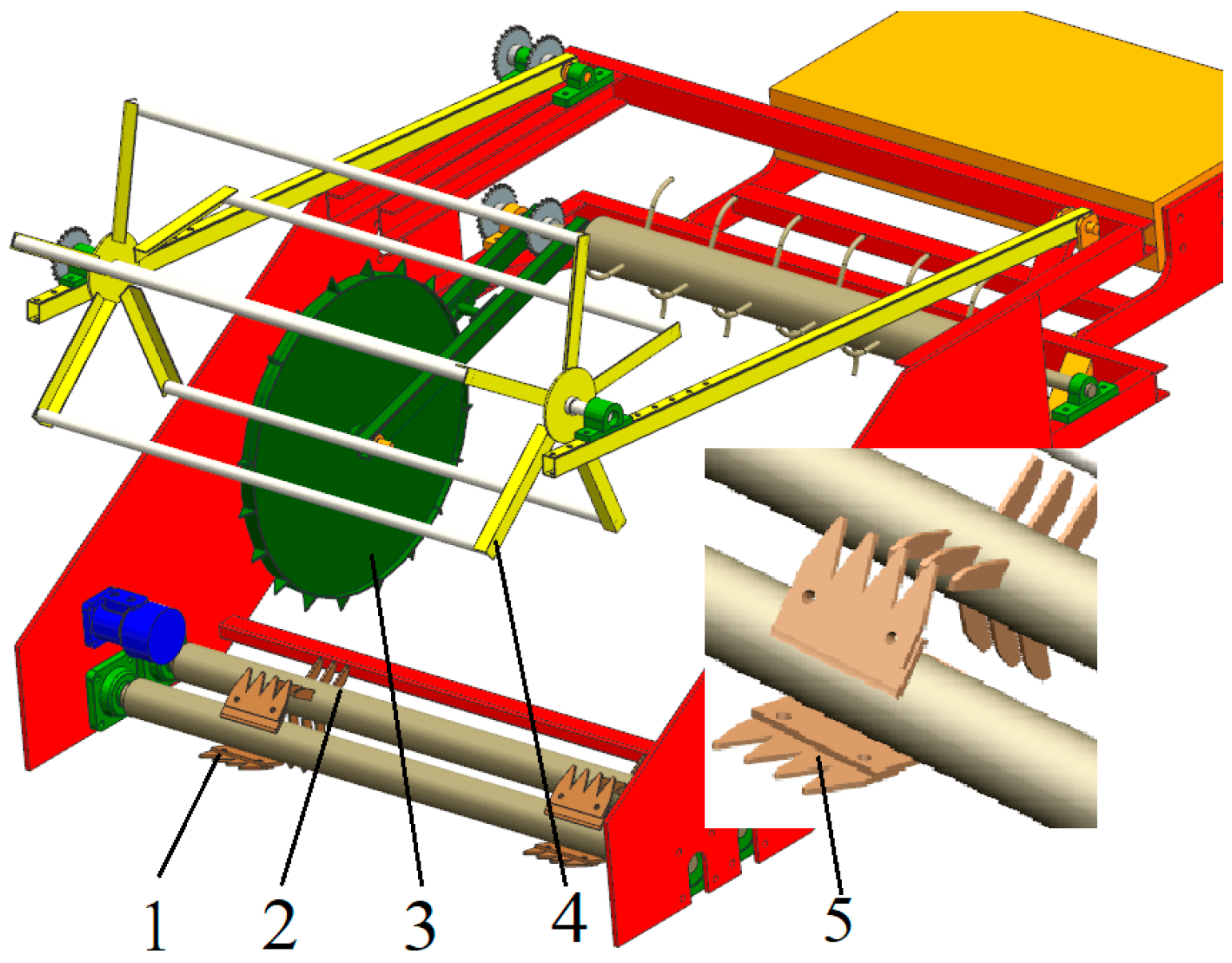
2.1. V-Shaped Toothed Roller Stalk Pulling Structure and Working Principle
2.2. Key Component Design
2.2.1. Determination of V-Shaped Toothed Roller Rotational Speed
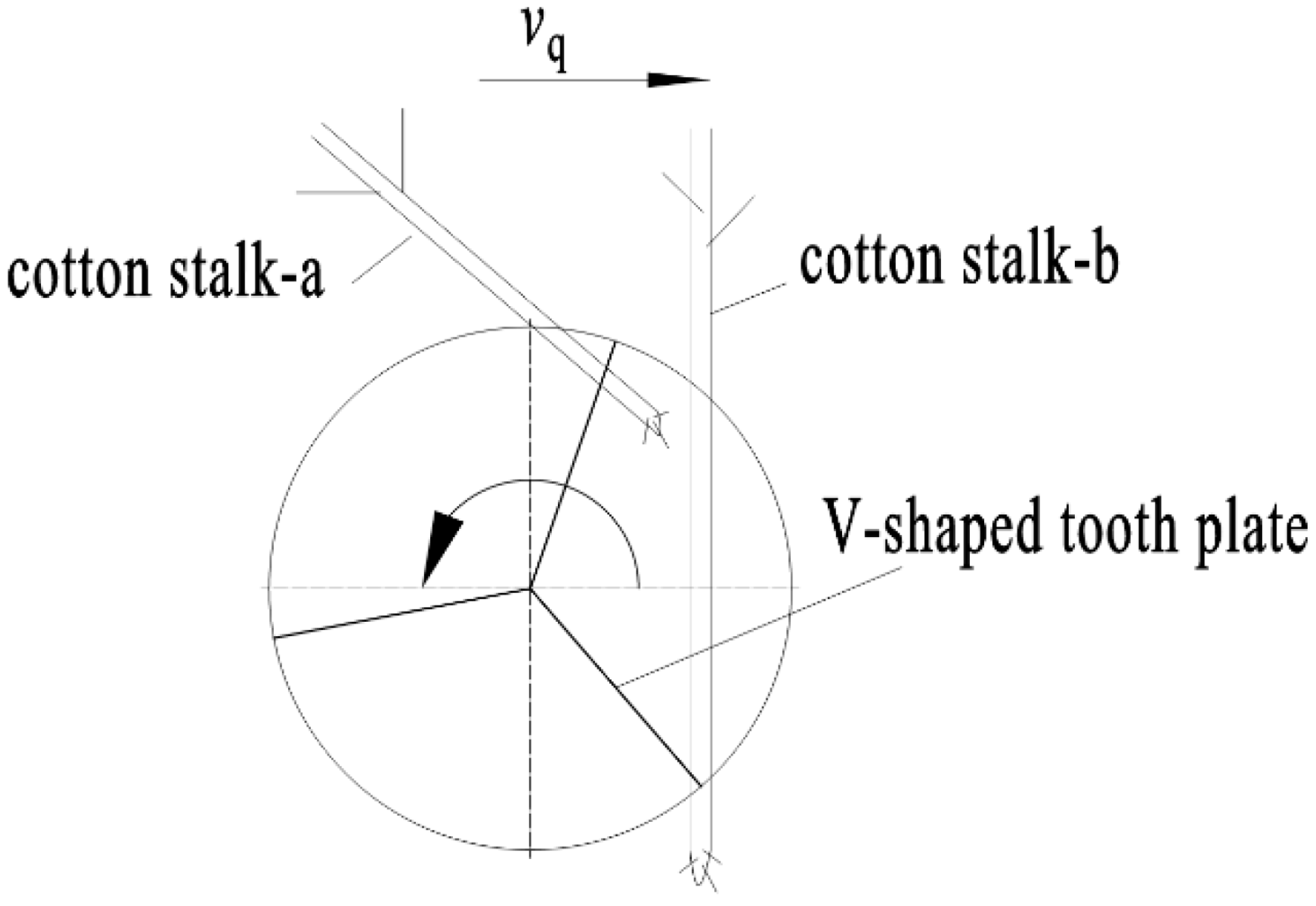
2.2.2. Determination of V-Shaped Toothed Plate Parameters
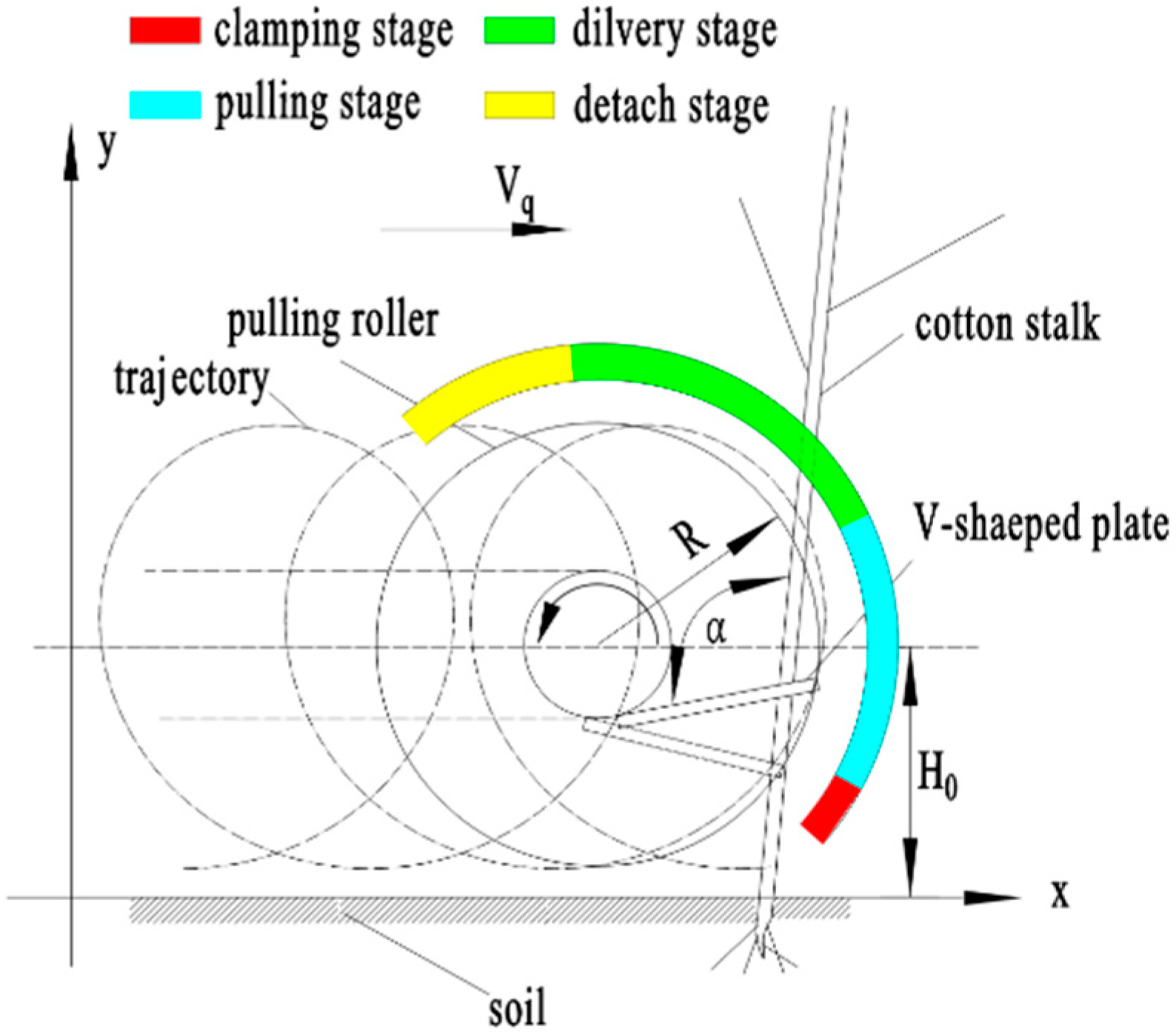
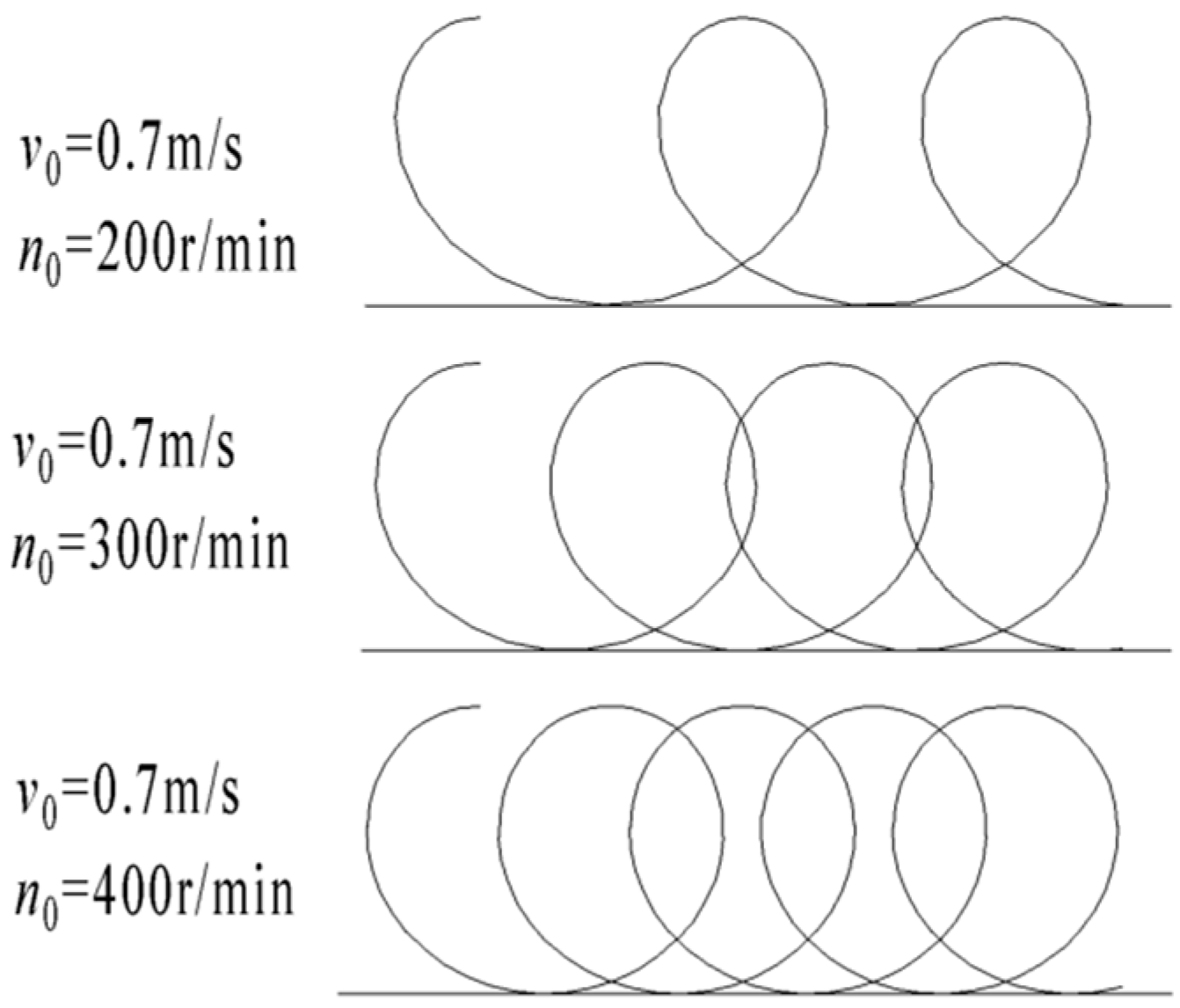
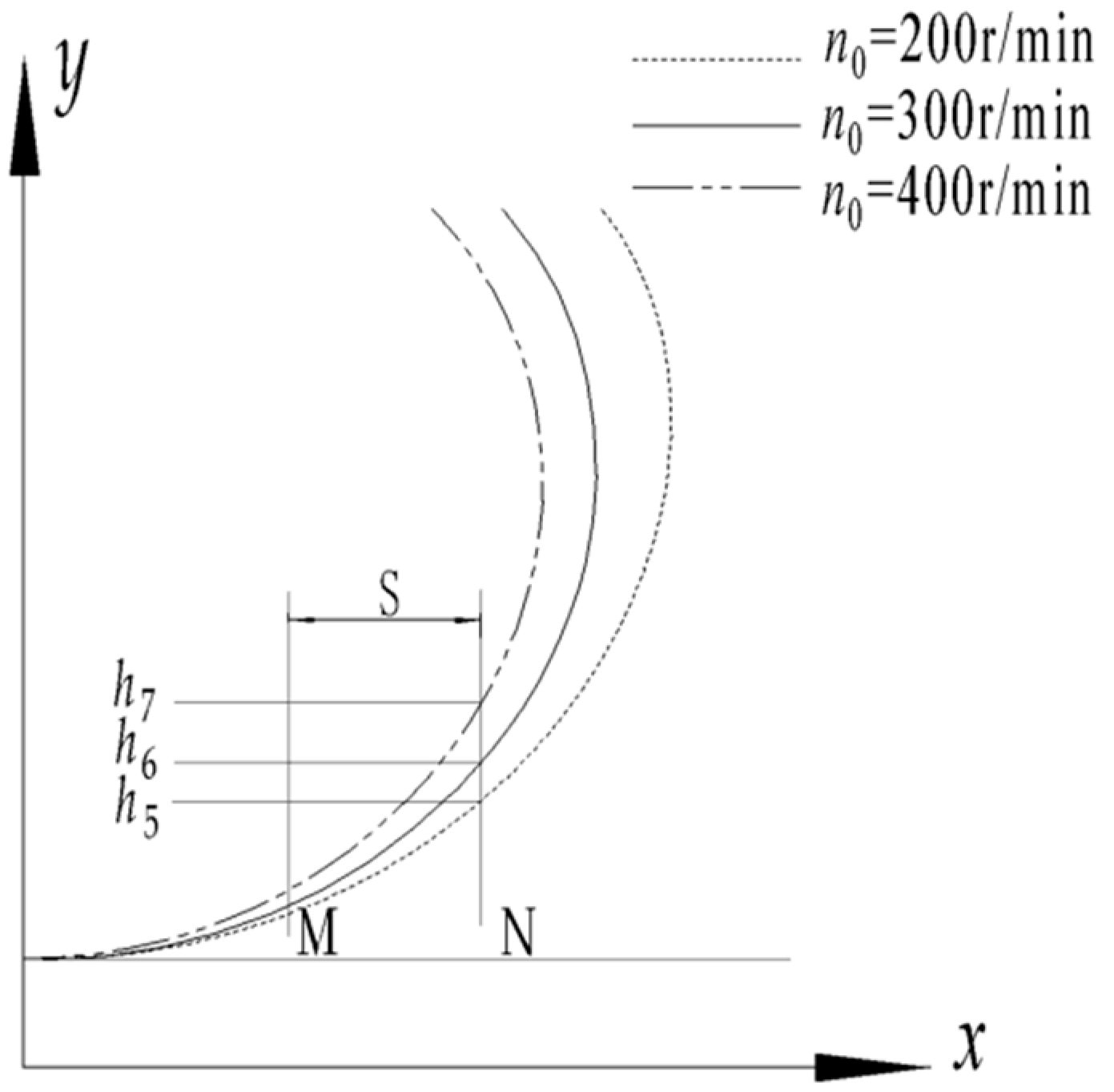
2.3. Cotton Stalk Pulling Process: Analysis of Toothed Roller Motion Trajectory
2.3.1. Cotton Stalk Pulling Process: Collision Analysis
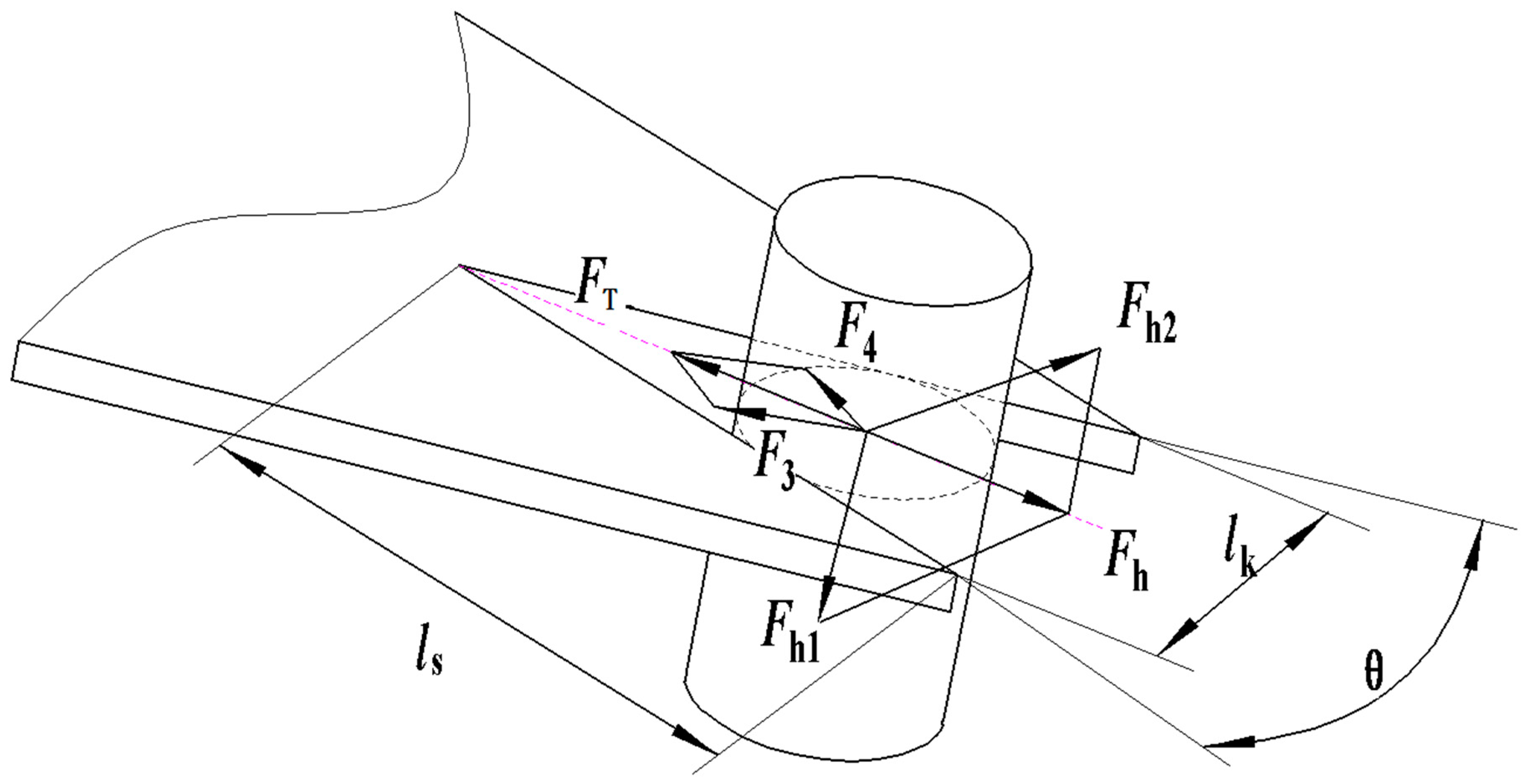
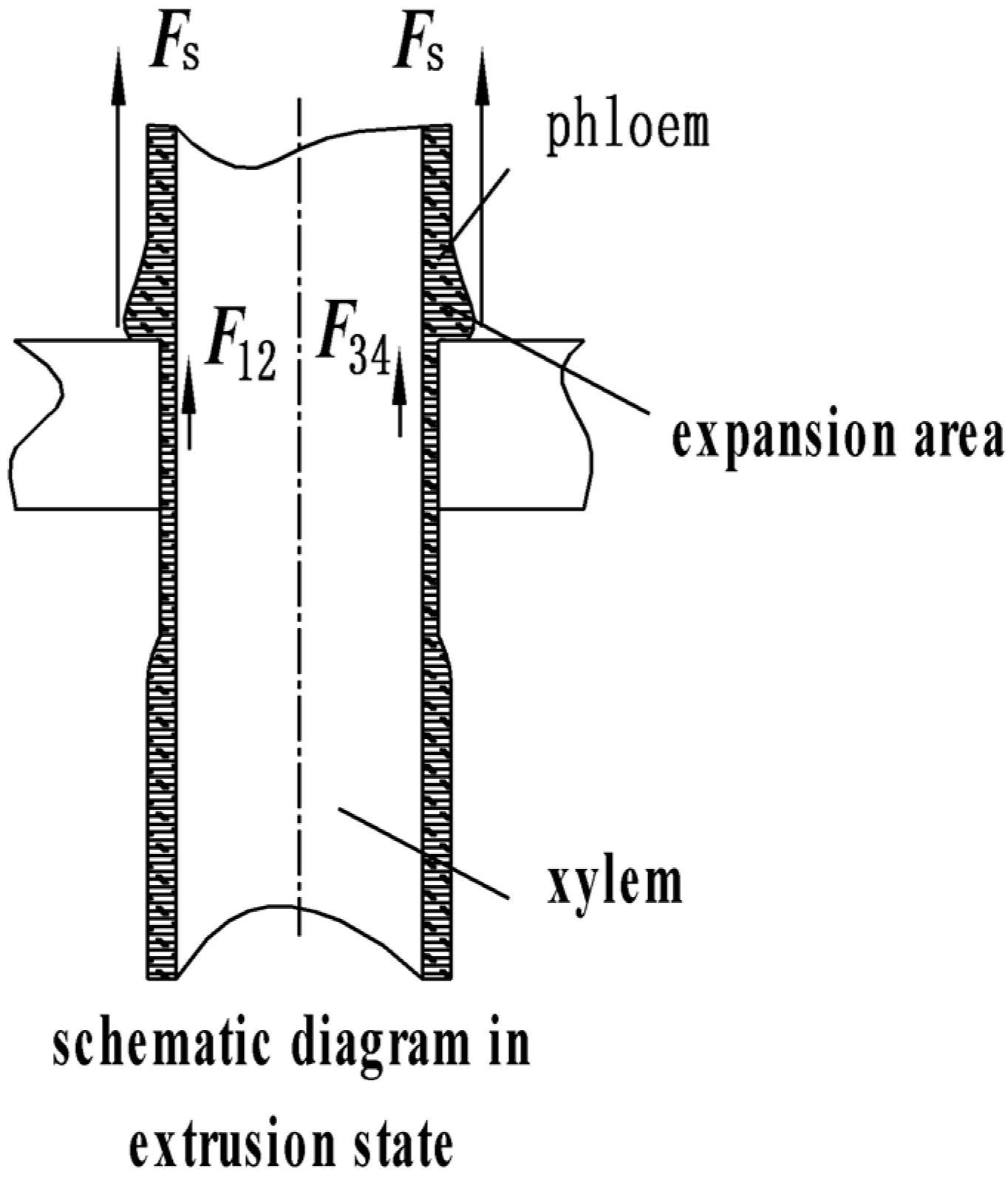
2.3.2. Cotton Stalk Pulling Process: Mechanical Analysis of Cotton Stalk Push and Pull Forces
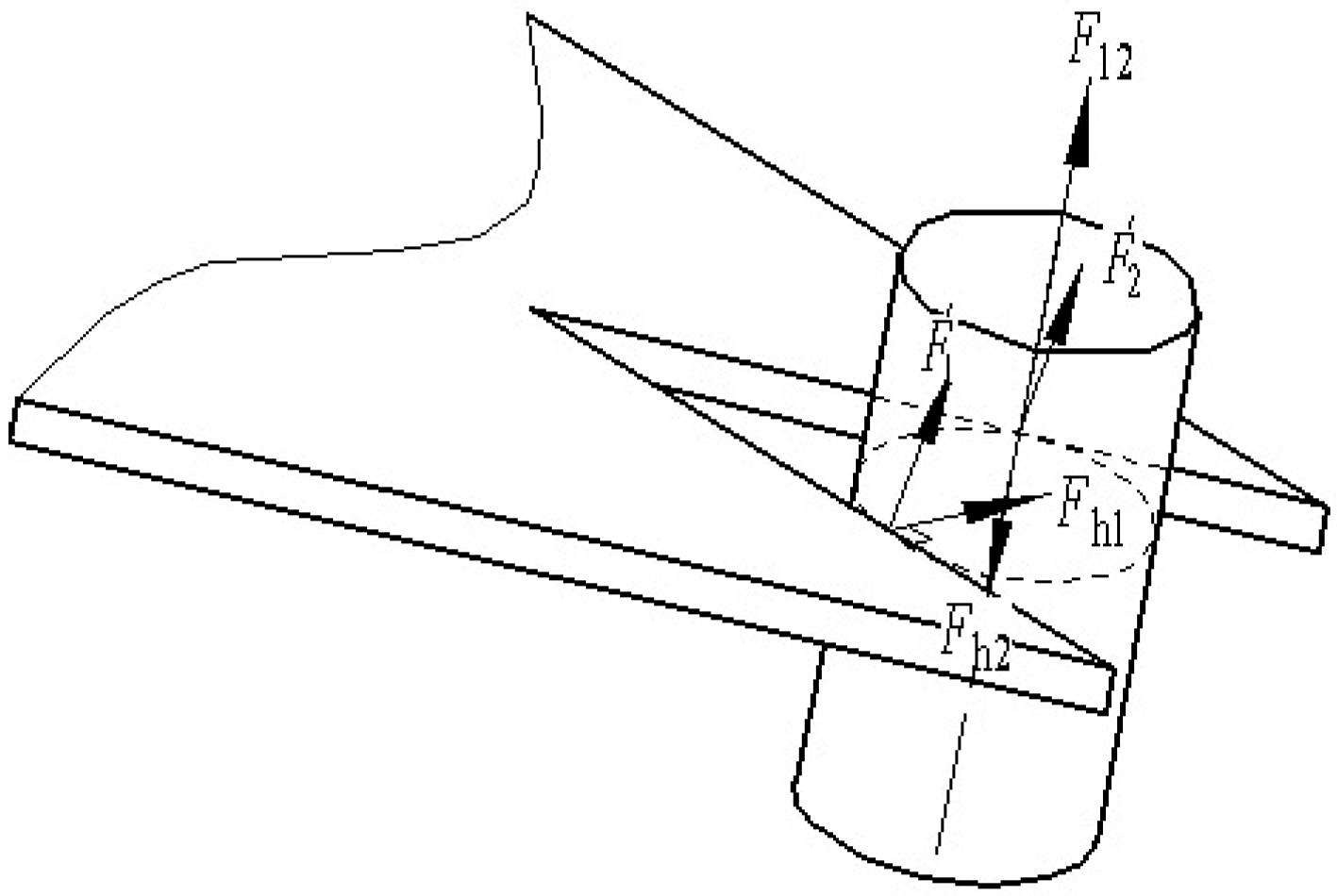
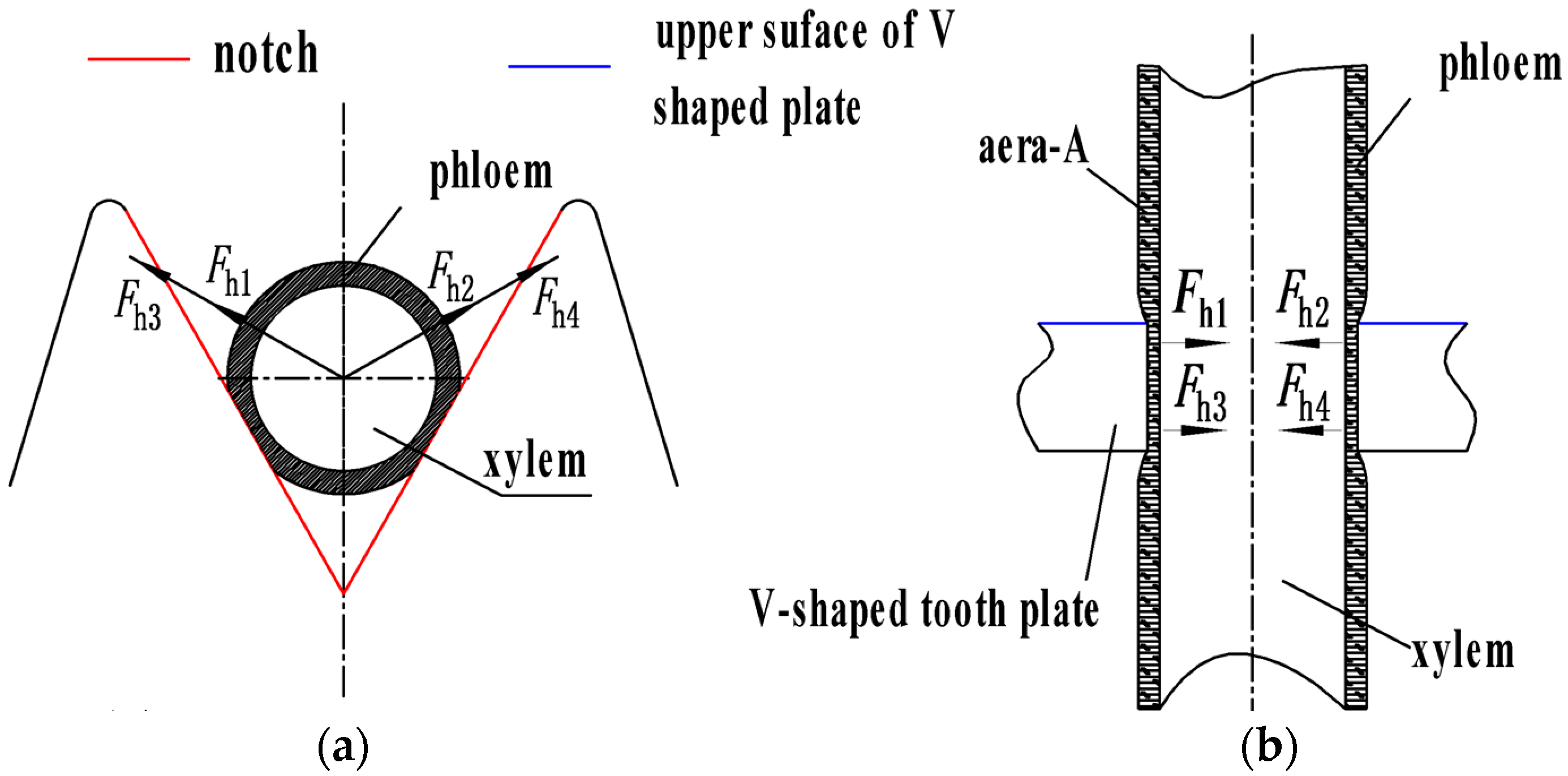
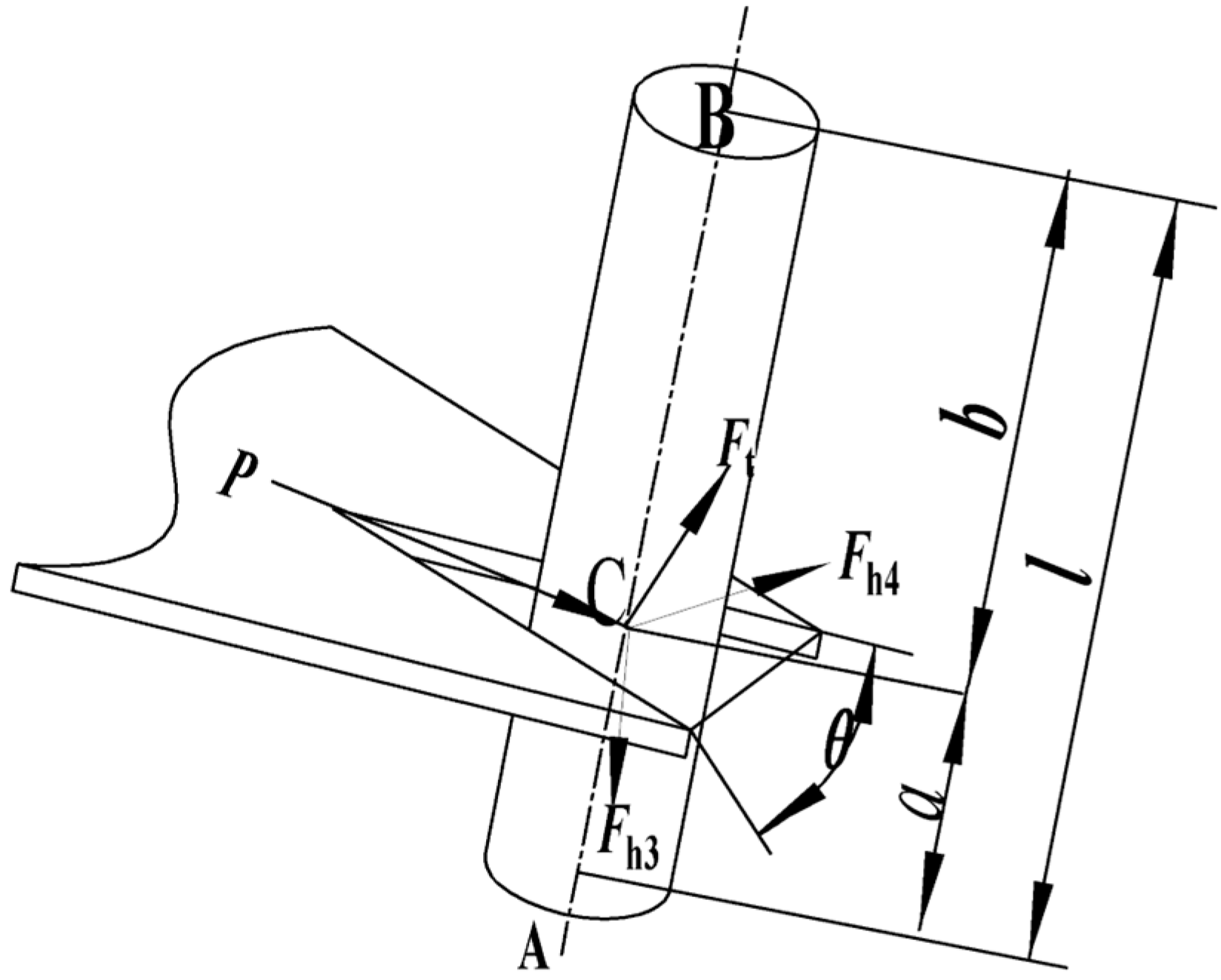
2.3.3. Cotton Stalk Pulling Process: Analysis of the Bilateral Forces Acting on the Clamping Tooth
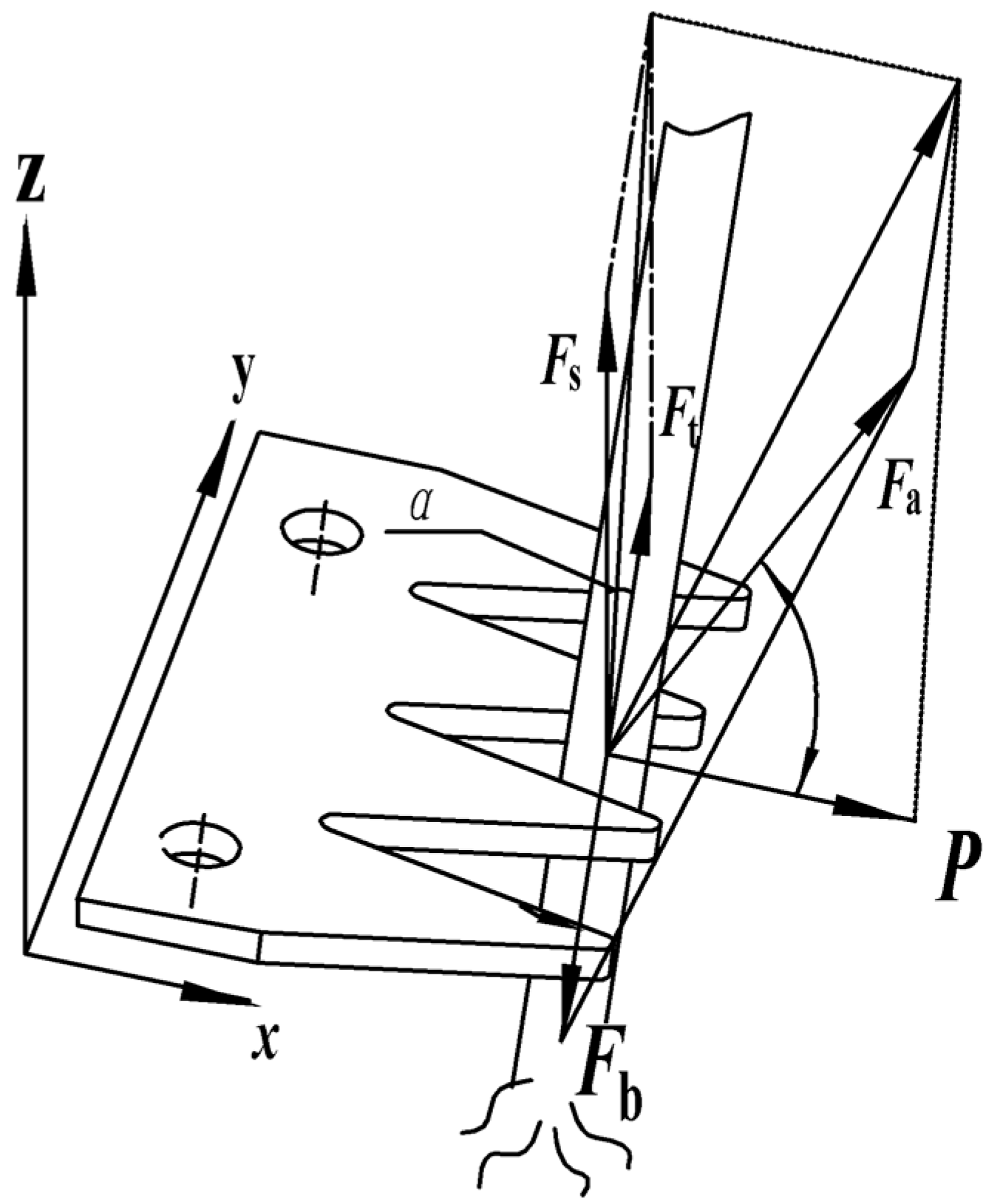
2.3.4. Cotton Stalk Pulling Process: Establishment of Mechanical Model
2.4. Field Tests
2.4.1. Test Equipment and Materials
2.4.2. Test Factors and Levels
2.4.3. Test Methods
3. Results and Discussion
4. Conclusions
- Combining parameters such as cotton diameter, plant distance, V-shaped tooth speed, and friction coefficient between cotton and tooth plate, it is determined that the suitable angle range of the groove was 25.6° to 38.6°.
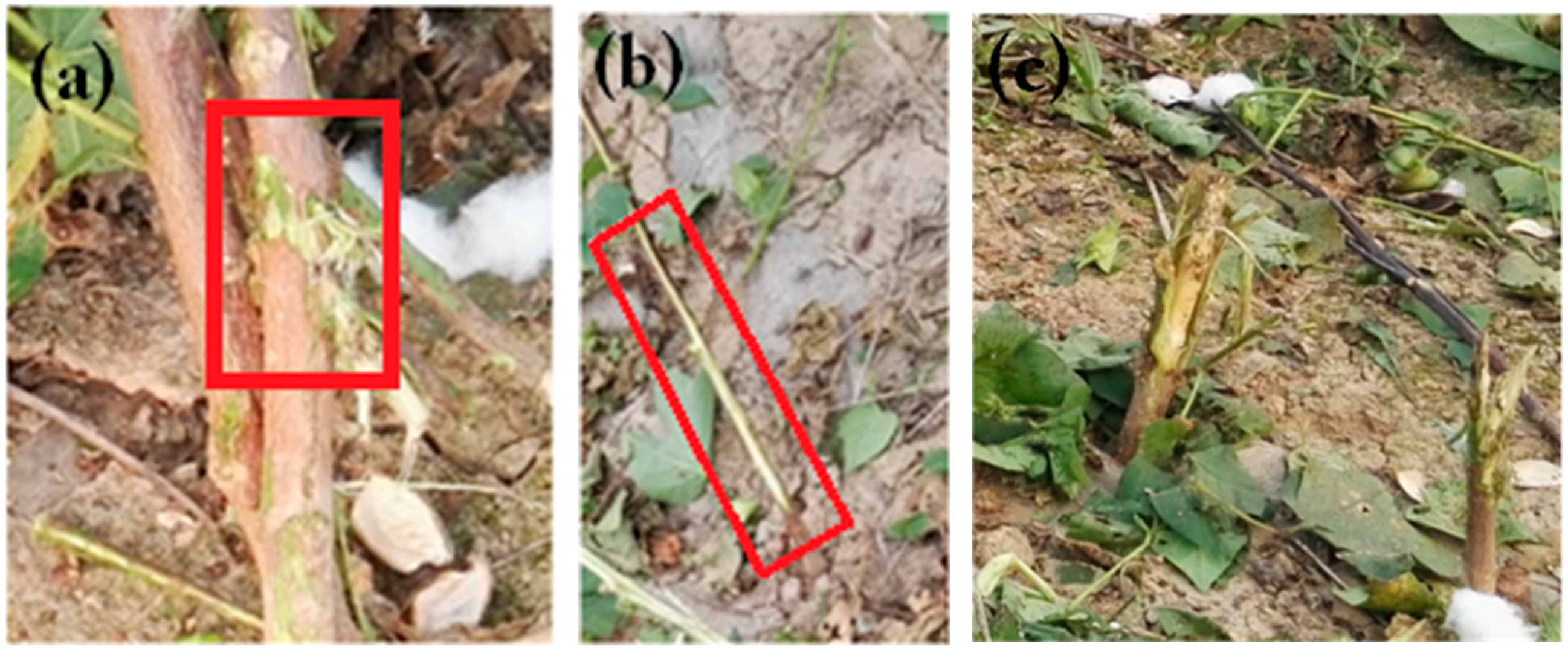
- On the basis of the cotton stalk pulling model, acceleration was further introduced. A detailed theoretical explanation was given for the state of missing or breaking stalks during pulling.
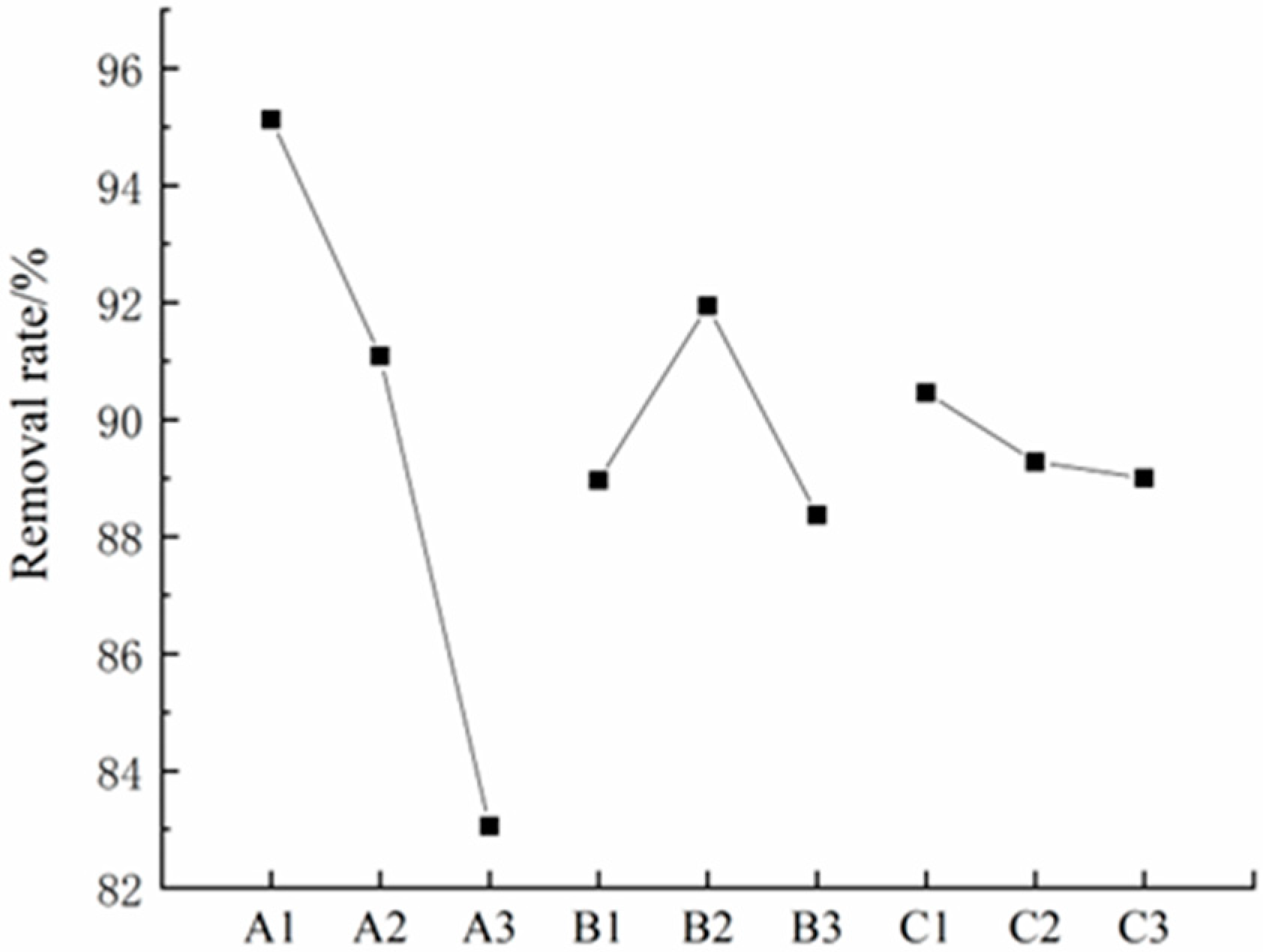
- The orthogonal test results demonstrated that the ground clearance of the V-shaped toothed roller had an extremely significant effect on the removal rate. The lower the ground clearance, the better the soil penetration effect. The tooth groove angle has no significant effect on the extraction rate. The effect test showed that the primary and secondary order of the influence of various factors on the cleaning rate was ground clearance > speed > cogging angle. Additionally, under the condition of not considering the extraction energy consumption, the more suitable combination of mechanism parameters was ground clearance −20 mm. The speed of the V-shaped toothed roller was 300 r/min, and the angle of the tooth groove was optional between 25° and 40°.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Y.; Ding, Y.; Li, J.; Yang, Y. Current Situation and Pest Problems of Cotton Stalk Returning Machinery in China. Farm Mach. 2023, 3, 79–82. [Google Scholar]
- Wang, Y.; Liu, Z.; Cheng, Y. Research on the low-carbon transformation of Xinjiang green and renewable energy cotton stalks. Mod. Bus. Trade Ind. 2023, 44, 18–20. [Google Scholar]
- Zuo, X.; Bi, Y.; Wang, H.; Gao, C.; Wang, L.; Wang, Y. Estimation and Suitability Evaluation of Cotton Stalk Resources in China. China Popul. Resour. Environ. 2015, 25, 159–166. [Google Scholar]
- Zhang, Z.; Qin, C.; Wang, L.; Zhou, L. Cotton stalk Resources Research Status. Xinjiang Agric. Mech. 2014, 5, 21–23. [Google Scholar]
- Shen, M.; Zhang, G.; Zhou, Y.; Zhou, M. The Review of the Mechanization Technology for Cotton Stalk Harvesting in our Country. J. Agric. Mech. Res. 2009, 31, 7–11. [Google Scholar]
- Dong, S.; Wang, F.; Qiu, Z.; Sun, Y. Design and Experiment of Self-propelled Cotton-stalk Combine Harvester. Trans. Chin. Soc. Agric. Mach. 2010, 41, 99–102. [Google Scholar]
- Chen, M.; Wang, Z.; Qu, H.; Chen, Y.; Liu, K.; Song, D. Bending and tensile properties tests of the cotton-stalk. J. Chin. Agric. Mech. 2015, 36, 29–32. [Google Scholar] [CrossRef]
- Chen, M.; Song, D.; Wang, Z.; Wang, R.; Liu, K.; Chen, Y. Research on the Cotton-stalk Uprooting Resistance. J. Agric. Mech. Res. 2016, 38, 64–68. [Google Scholar]
- Li, Y.; Zhang, G.; Zhou, Y.; Ji, W.; Li, Z.; Zhang, Y.; Zai, K. Design and field experiment of drawing resistance measurement system for cotton stalk. Trans. Chin. Soc. Agric. Eng. 2013, 29, 43–50. [Google Scholar]
- Zhang, G.; Li, Y.; Li, Z.; Zhang, Y.; Zhai, K. Measuring System of Cotton Stalk Real-Time Pull Force in The Field Based on LabVIEW. In Proceedings of the 2014 ASABE International Meeting, Montreal, QC, Canada, 13–16 July 2014; ASABE: St. Joseph, MI, USA, 2014; p. 1. [Google Scholar]
- Demian, T.F. The Pull and Lift Required to Remove Cotton Stalks in the Sudan. Exp. Agric. 1978, 14, 129–135. [Google Scholar] [CrossRef]
- Tang, Z.; Han, Z.; Gan, B.; Bao, C.; Hao, F. Design and Experiment on Cotton Stalk Pulling Head with Regardless of Row. Trans. Chin. Soc. Agric. Mach. 2010, 41, 80–85. [Google Scholar]
- Chen, M.; Zhao, W.; Wang, Z.; Liu, K.; Chen, Y.; Hu, Z. Operation Process Analysis and Parameter Optimization of Dentate Disc Cotton-stalk Uprooting Mechanism. Trans. Chin. Soc. Agric. Mach. 2019, 50, 109–120. [Google Scholar]
- Ma, J.; Jian, S.; Zhou, H. Design of Zigzag Disk Harvester of Cotton Stem. Agric. Equip. Veh. Eng. 2010, 8, 3–5. [Google Scholar]
- Ying, Y.; Cao, S.; Wang, M.; Lu, Y. Design and test of roller cotton stalk plucking device. Xinjiang Farm Res. Sci. Technol. 2018, 41, 22–24. [Google Scholar]
- Wang, S.; Liu, N. Research on the tray type cotton-wood harvesting machine. Cereals Oils Process. 1994, 6, 23–25. [Google Scholar]
- Guo, Z.; Shi, J.; Kang, X. The Resistance Analysis of Roller-cotton Stalks. J. Agric. Mech. Res. 2009, 31, 37–39. [Google Scholar]
- Zhang, A.; Wang, Z.; Liu, K.; Liu, Y.; Wang, H.; Zhu, D. Design and experiment of the key parts with cotton-stalk on baling combine harvester. J. Chin. Agric. Mech. 2016, 37, 8–13. [Google Scholar] [CrossRef]
- Liao, P.; Liu, K.; Chen, M.; Wang, Z.; Zhang, A. Design and experiment of a roller type cotton stalk cutting mechanism. J. China Agric. Univ. 2018, 23, 131–138. [Google Scholar]
- Zhang, A.; Liu, K.; Wang, Z.; Liu, Y.; Wang, H. Design and Trial on Cotton Stalk Pulling Head with Multi-roller. J. Agric. Mech. Res. 2016, 38, 91–95. [Google Scholar]
- Wang, Z.; Geng, D.; Meng, P.; Jiang, C.; Yan, B. Cutter Installation Performance Impact on the Harvest of Cotton Stalk and Experiment Research. J. Agric. Mech. Res. 2015, 37, 22–26. [Google Scholar]
- He, X. Design and Experiment Research of Cotton Stalk Pulling-Out Mechanism. Master’s Thesis, Hunan Agricultural University, Changsha, China, 2016. [Google Scholar]
- Dai, Z. Design and Research on Cotton Stalk Drawing Institutions of Pull-out Cotton Stalk Mehanism. Master’s Thesis, Hunan Agricultural University, Changsha, China, 2015. [Google Scholar]
- Yin, S. The Design Improvement of Cotton Stalk Crushing and Rubbing Machine. Master’s Thesis, Northwest A&F University, Xianyang, China, 2016. [Google Scholar]
- Li, X.; Qian, L.; Wang, C. Elastic collision is understood from the point of view of force and motion. J. Phys. Teach. 2018, 36, 60–61. [Google Scholar]
- GB/T 8097; Equipment for Harvesting-Combine Harvesters-Test Procedure. Standardization Administration of China: Beijing, China, 2008.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Length × width × height (mm) | 1500 × 1200 × 1100 |
| Number of lines | 2 |
| Drive mode | hydraulic |
| Tooth plate: diameter × thick (mm) | 220 × 120 |
| Rotational speed (r/min) | 100–600 |
| Levels | Factors | ||
|---|---|---|---|
| A. Ground Clearance/(mm) | B. Rotation Speed/(r/min) | C. Cogging Angle/(°) | |
| 1 | −20 | 200 | 25 |
| 2 | 20 | 300 | 32.5 |
| 3 | 60 | 400 | 40 |
| Experiment No. | Factors | y | ||||
|---|---|---|---|---|---|---|
| A | B | C | D (Emptyrow) | Removal Rate/% | ||
| 1 | 1 | 1 | 1 | 1 | 94.76 | |
| 2 | 1 | 2 | 2 | 2 | 97.34 | |
| 3 | 1 | 3 | 3 | 3 | 93.29 | |
| 4 | 2 | 1 | 2 | 3 | 89.58 | |
| 5 | 2 | 2 | 3 | 1 | 92.77 | |
| 6 | 2 | 3 | 1 | 2 | 90.9 | |
| 7 | 3 | 1 | 3 | 2 | 82.53 | |
| 8 | 3 | 2 | 1 | 3 | 85.71 | |
| 9 | 3 | 3 | 2 | 1 | 80.93 | |
| Average removal rate/% | k1 | 95.13 | 88.96 | 90.46 | 89.49 | |
| k2 | 91.08 | 91.94 | 89.28 | 90.26 | ||
| k3 | 83.06 | 88.37 | 89.00 | 89.53 | ||
| R | 12.07 | 3.57 | 1.46 | 0.77 | ||
| Influence order: A > B > C | ||||||
| Source | Sum of Squares | Degree of Freedom | Sum of Mean Squares | F Value | Significant Level p |
|---|---|---|---|---|---|
| A | 226.568 | 2 | 113.284 | 200.97 | 0.005 ** |
| B | 21.962 | 2 | 10.981 | 19.48 | 0.049 * |
| C | 2.296 | 2 | 1.148 | 2.04 | 0.329 |
| Pure error | 1.127 | 2 | 0.564 | ||
| Cor total | 251.954 | 8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Zhao, W.; Fu, J.; Xie, H.; Zhang, Y.; Chen, M. V-Shaped Toothed Roller Cotton Stalk Puller: Numerical Modeling and Field-Test Validation. Agriculture 2023, 13, 1157. https://doi.org/10.3390/agriculture13061157
Wang Z, Zhao W, Fu J, Xie H, Zhang Y, Chen M. V-Shaped Toothed Roller Cotton Stalk Puller: Numerical Modeling and Field-Test Validation. Agriculture. 2023; 13(6):1157. https://doi.org/10.3390/agriculture13061157
Chicago/Turabian StyleWang, Zhenwei, Weisong Zhao, Jingjing Fu, Hu Xie, Yinping Zhang, and Mingjiang Chen. 2023. "V-Shaped Toothed Roller Cotton Stalk Puller: Numerical Modeling and Field-Test Validation" Agriculture 13, no. 6: 1157. https://doi.org/10.3390/agriculture13061157