

Design and Testing of a Self-Propelled Dandelion Seed Harvester
1
College of Mechanical and Electrical Engineering, Henan Agricultural University, Zhengzhou 450002, China
2
Changyuan Branch of Henan Academy of Agricultural Sciences, Xinxiang 453004, China
*
Author to whom correspondence should be addressed.
Agriculture 2023, 13(4), 917; https://doi.org/10.3390/agriculture13040917
Submission received: 13 March 2023
/
Revised: 11 April 2023
/
Accepted: 12 April 2023
/
Published: 21 April 2023
(This article belongs to the Special Issue 'Eyes', 'Brain', 'Feet' and 'Hands' of Efficient Harvesting Machinery)
Abstract
:At present, there are few harvesters for dandelion (Taraxacum mongolicum) seeds, which limits the large-area planting of dandelion. Furthermore, manual harvesting is characterized by huge labor intensity, low efficiency, and high costs. Combining the material characteristics of dandelion plants and seeds with agronomic requirements for harvesting dandelion seeds, a self-propelled dandelion seed harvester was designed. The harvester is mainly composed of collection devices, separation devices, transmission devices, and a rack. It can facilitate seed collection from plants, seed transportation, and seed–pappus separation in one operation. The collection and separation processes of dandelion seeds were studied to ascertain the main factors that affect the collection rate. Then, the collection and separation devices were designed, and their parameters were analyzed. Taking the forward speed, wind velocity of blowers, and rate of rotation of the drum as test factors and the collection rate as the evaluation index, quadratic regression orthogonal rotating field tests were performed. In this way, the optimal combination of operation parameters was determined: the collection rate is optimal when the forward speed is 0.8 m·s−1, the air velocity from the blowers is 1.63 m·s−1, and the rate of rotation of the drum is 419 rpm. Field test results showed that a favorable harvesting effect was achieved after operation of the harvester, and only small amounts of dandelion seeds remained unharvested. Under the optimal parameter combination, the collection rate reached 89.1%, which could meet requirements for practical field harvesting of dandelion seeds. The test results satisfy the design requirement.
1. Introduction
Dandelion (Taraxacum mongolicum) is a perennial herb that is rich in vitamins A and C and nutrient elements such as potassium [1,2,3,4] and that has high medicinal value [5,6] and economic value [7]. Dandelion leaves with extremely high medicinal value are commonly picked and sold as an herbal medicine (to considerable economic benefit). The harvesting of dandelion seeds requires suitable timeliness. Dandelion seeds need to be harvested quickly, or mature seeds will detach from the plants and fall with the wind, which brings difficulties to harvesting and reduces the yield of dandelion seeds. In order to meet the needs of food or medicine, people began to try to plant dandelion artificially. However, due to the special structure of dandelion seeds, the existing seed collection machine cannot be applied to the collection of dandelion seeds. After the maturation of dandelion, the seed collection process becomes complex, requiring a lot of manpower and material resources, and the collection efficiency is very low, which is not conducive to the artificial cultivation of dandelion.
At present, dandelion seed harvesters are hardly studied by foreign researchers. Some Chinese researchers have studied the mechanized harvesting of dandelion seeds. Xie [8] designed a handheld dandelion seed harvesting device which can initially achieve the purpose of dandelion seed collection, save labor and material resources to a certain extent, and improve the speed of collection. Zhang [9] designed a cross-walking remote-controlled dandelion seed harvester based on the principle of a vacuum cleaner. The adsorption seed collection device is connected with the walking device and with a car structure, and the height of the car body is adjustable. As the dandelion harvester can operate at different heights, multi-line dandelion seeds can be quickly harvested, and the efficiency of dandelion harvesting operations can be improved. Yin [10] devised a dandelion seed harvester on which the rocker is equipped with a seed-drawing disc, allowing seeds to be drawn into the seed storage tank. The harvester solves the time-consuming and laborious problems of artificial picking, although it still needs operators to bend over for a long time, leading to high labor intensity and low operational efficiency. Zhang [11] designed a dandelion seed harvester that draws seed–pappus mixtures of dandelion into the separation drum through an air-suction pipeline to separate seeds from pappi. Wang [12] designed a dandelion seed collection device. The controller can adjust the width of the feed port according to the actual data through image processing; moreover, the working powers of the servo-motor, vibration motor, and scattering motor can also be adjusted, which allows better harvesting. However, most relevant research on the topic in China is still in its infancy, and since the harvesters have not been verified as reliable in the field, they cannot be applied to practical production.
Aiming to improve the harvesting rate, reduce harvesting loss, decrease labor intensity, and increase the degree of mechanization, a self-propelled dandelion seed harvester was designed according to agronomic requirements for harvesting dandelion seeds and material characteristics of dandelion plants and seeds. By analyzing the collection and separation processes of dandelion seeds, the main factors that affect the collection rate were determined. Then, the collection and separation devices were designed, and their parameters were analyzed. Taking the forward speed, wind velocity of blowers, and rate of rotation of the drum as experimental factors, and taking the collection rate as the evaluation index, quadratic regression orthogonal rotating field tests were conducted. In this way, the optimal combination of operation parameters was determined. By conducting field tests, the harvesting quality of the harvester was assessed and the design was verified as being both reasonable and reliable.
2. The Structure and Working Mechanism
2.1. The Structure
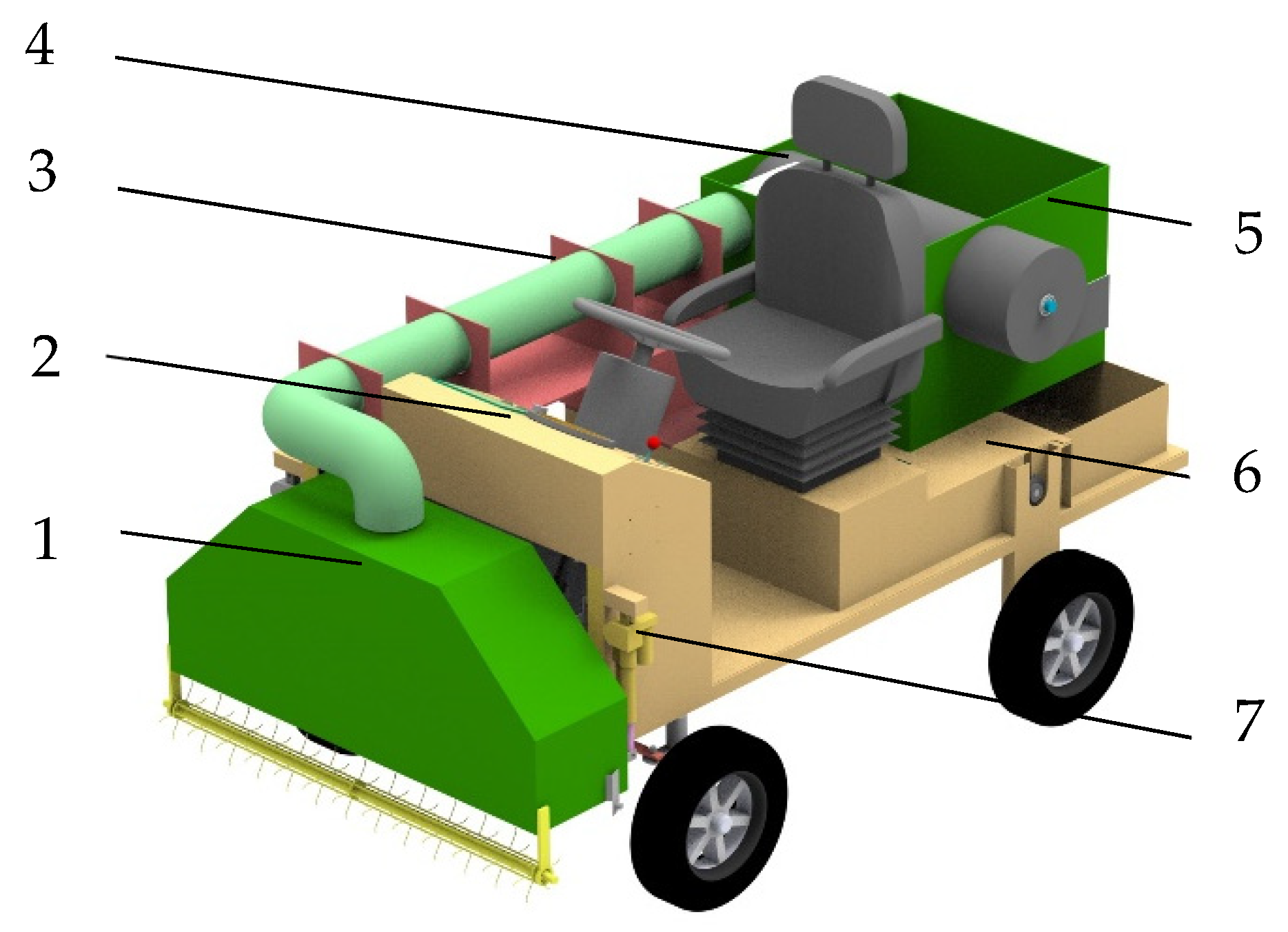
The dandelion seed harvester was mainly composed of the collection devices, central control board, transmission pipeline, separation devices, seed storage tank, transmission system, and a rack. The three-dimensional (3D) structure of the harvester is shown in Figure 1. The collection devices mainly consist of a disturbing roller, a collection cover, negative-pressure blowers, and a height-regulating device. The separation devices mainly include a cap, bafflers, a concave board, and a separation drum. The collection devices draw dandelion seeds with pappi from plants to the devices using negative-pressure blowers. The separation devices separate seeds from pappi using a separation drum so that seeds fall in the seed storage tank. The parameter table of the dandelion seed harvester is shown in Table 1.
2.2. Working Mechanism
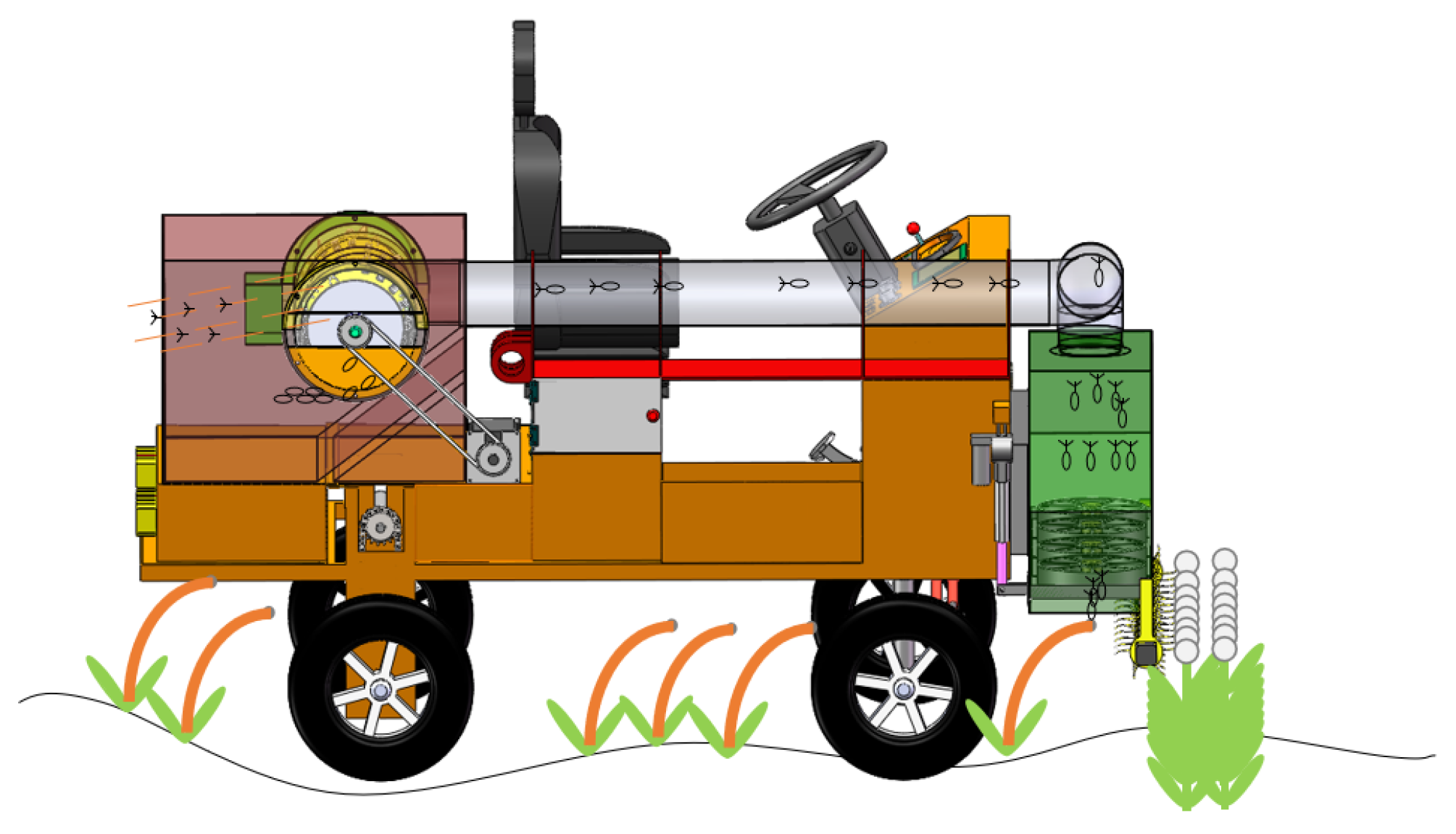
The harvester uses a harvesting scheme that collects dandelion seeds using negative-pressure blowers and separates seeds using the separation drum. A schematic representation of the operation of the harvester is shown in Figure 2. Before field operation, the height-adjusting device is adjusted so that the collection devices have an approximate height, and operation parameters of various devices are adjusted to their desired values. Thereafter, the harvester is set to work in the field.
- (1)
- Collection. The disturbing roller in the lower part of the collection device is used to disturb plants so that seeds have a lower connection force to the plant and even fall from the plant. As a result, the wind velocity of blowers needed to collect seeds can be decreased, easing their collection. The negative-pressure blowers create a negative-pressure environment near the feed port to collect seeds with pappi in the devices [13,14,15]. The mixtures are then transported to the separation devices via the transmission pipeline.
- (2)
- Separation. Seeds with pappi are transported to the separation devices through the transmission pipeline. Two types of separation elements, namely, wire-loops and hairbrushes on the separation drum, beat and rub seeds with pappi so that the seeds are uniformly dispersed in the devices, followed by the separation of seeds from pappi.
The separated seeds fall off in the seed storage tank and pass through holes on the concave board for separation. The separated pappi are discharged from the harvester by the impurity removal mechanism on one side of the harvester.
3. Design of Key Components
3.1. Material Characteristics
Material characteristics of dandelion plants and seeds provide an important basis for the design of the harvester [16]. To determine key parameters including the plant height, diameter of spherical seed heads, and moisture content of seeds, 100 dandelion plants were randomly selected in the field and measured. The material characteristics of measured dandelion plants and seeds are summarized in Table 2.
3.2. Design of the Collection Devices
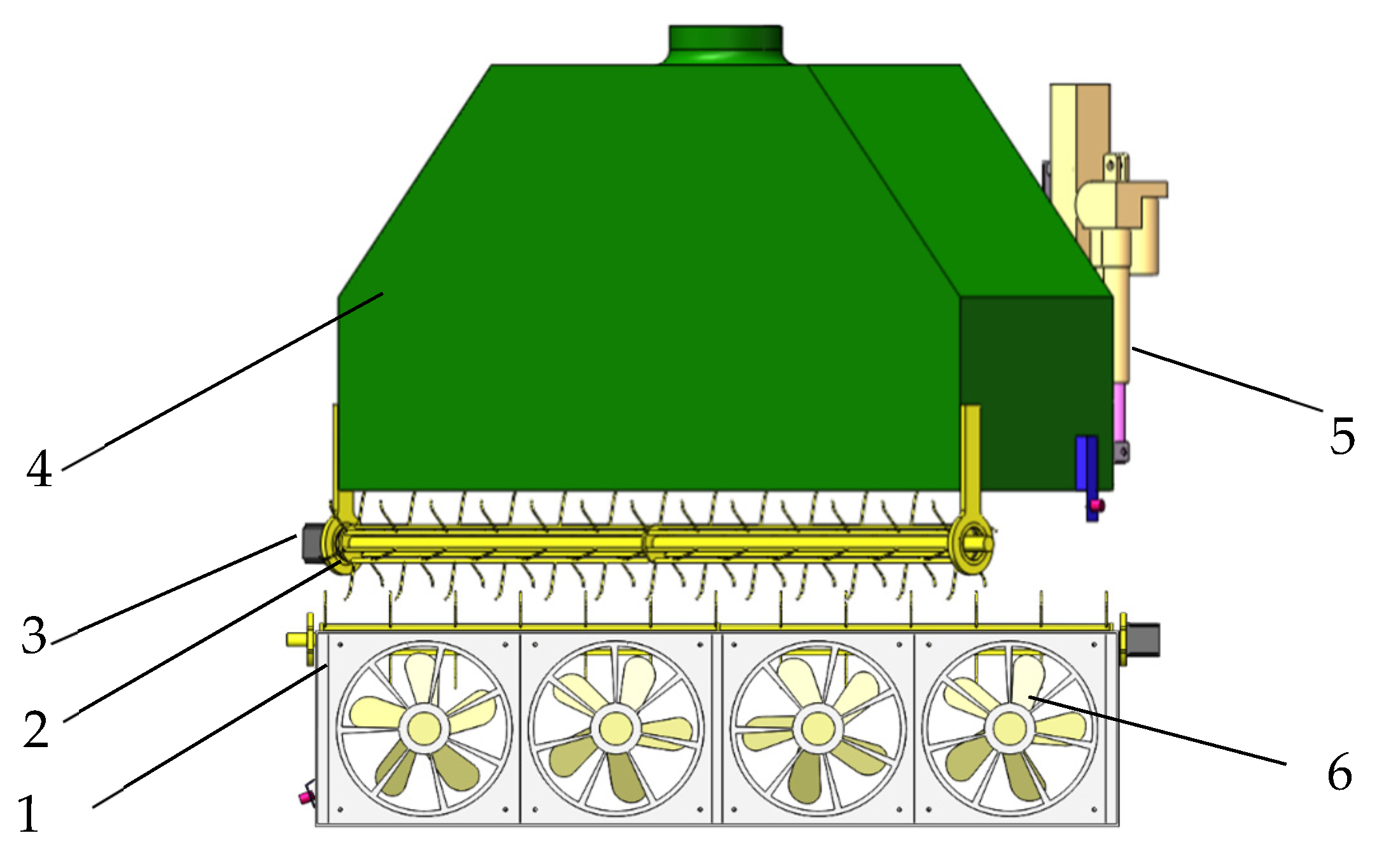
Collection is one of the key processes required to finish the harvesting of dandelion seeds. The collection devices mainly include the disturbing roller, collection cover, negative-pressure blowers, and the height-regulating device. The 3D structure of the collection devices is illustrated in Figure 3. Dandelion seeds with pappi detach from plants after being disturbed by the disturbing roller and then collect to the collection cover using negative-pressure blowers, thus completing their collection [17,18]. The design solves problems of difficulty collecting dandelion seeds with pappi, high labor intensity, and low harvesting efficiency.
3.2.1. Design of the Disturbing Roller
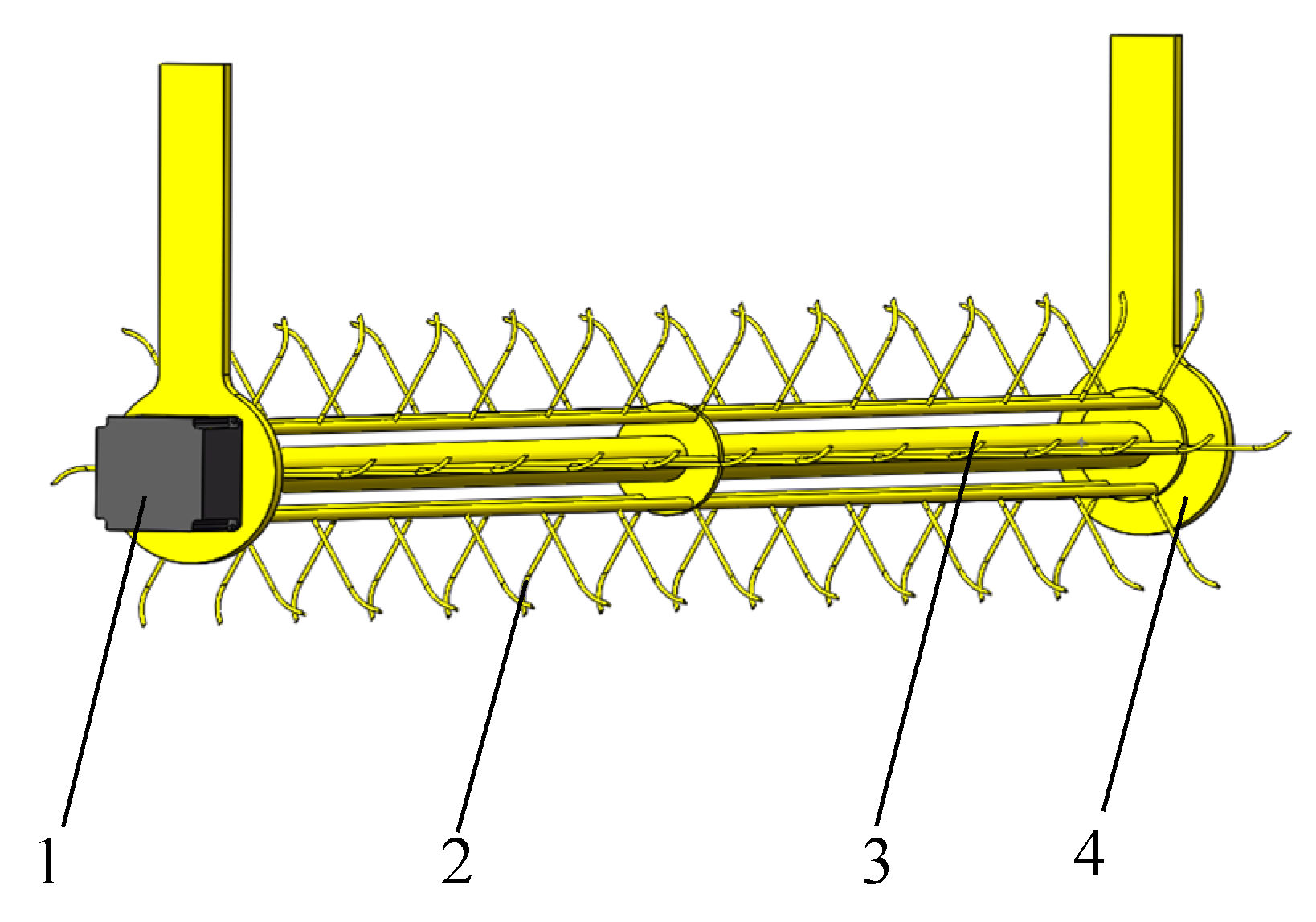
The disturbing roller is one of the core components of the collection devices. The collection quality, to a great extent, is influenced by the device [19,20]. Figure 4 illustrates the 3D structure of the disturbing roller, which mainly consists of a drive motor, a support frame, a rotation shaft, and spring-teeth; it is driven by the motor.
In this article, the diameter range of 4~6 cm was obtained by measuring the crown balls of 100 dandelion plants. The maximum diameter of 6 cm was used as the design basis; that is, the minimum horizontal length of the elastic teeth is 6 cm. At the same time, in order to better make the downed seeds move to the lower part of the fan, the head of the spring teeth is bent. The horizontal length of the bent spring teeth is 2 cm, and the horizontal length of the spring teeth is at least 6 cm. In this paper, when designing the horizontal spacing of the spring teeth, the minimum diameter of the crown ball was measured to be 4 cm, so the horizontal distance between the two spring teeth should be set to be less than 4 cm. In order to better facilitate contact between the disturbance roller and the crown ball, we designed the horizontal distance between the spring teeth to be 2 cm, ensuring that at least two spring teeth have contact with the crown ball at the same time and improving the shooting ability of the spring teeth. After analyzing the shape of the spring teeth of a wheat combine harvester and baler, it was determined that they have a cylindrical shape; therefore, the spring teeth designed in this paper are spring steel with a diameter of 6 mm. The spring teeth are evenly arranged on the disturbance roller with a horizontal spacing of 2 cm, and the horizontal length of the spring teeth is 6 cm.
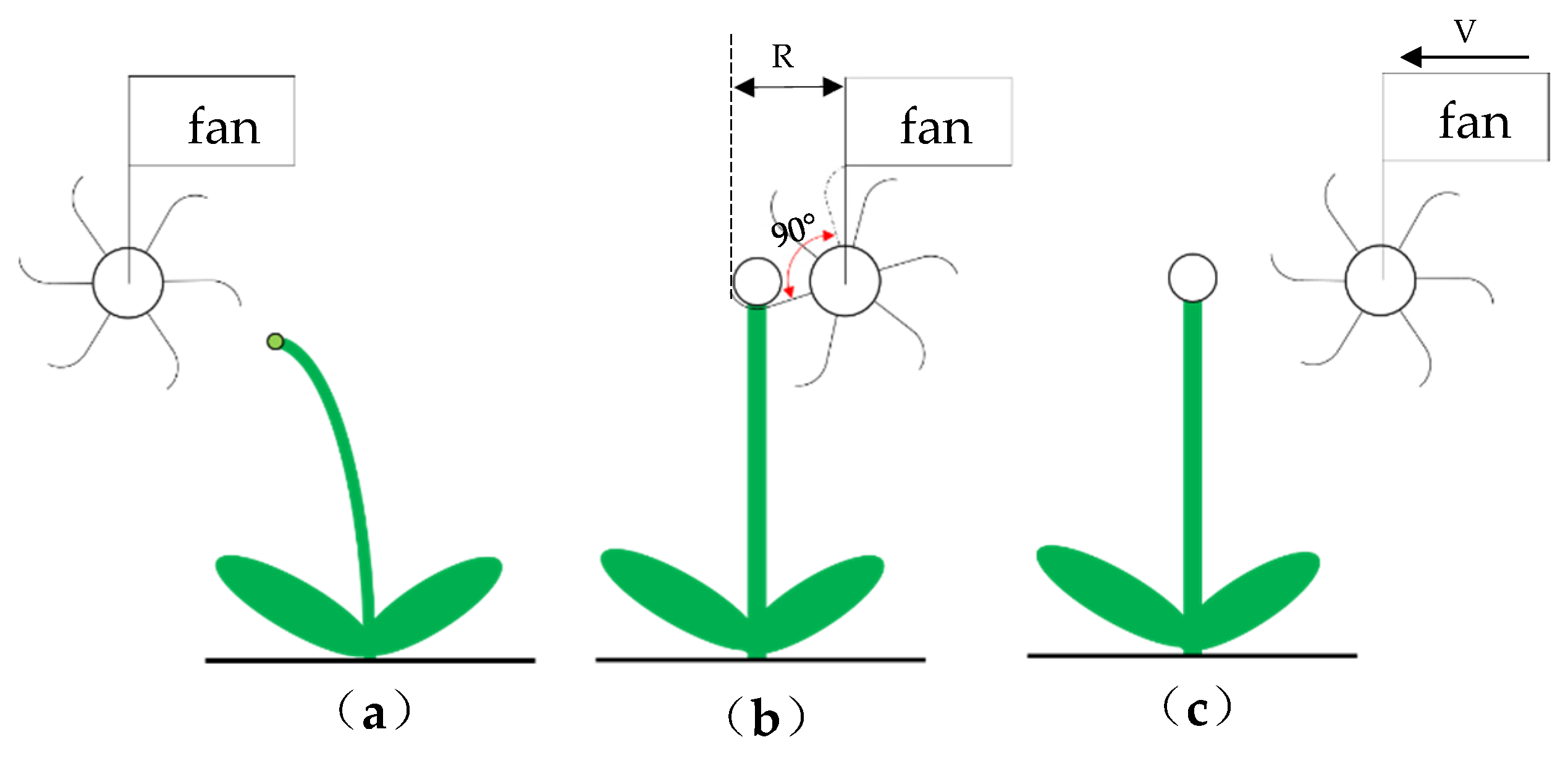
As shown in Figure 5, when collecting dandelion seeds the disturbing roller first disturbs dandelion plants to loosen the connection between the plants and seeds or to cause seeds to detach from the plants. Negative-pressure blowers are then used to finish the collection. It can be seen from Figure 5b that in order to improve the collection efficiency, it is necessary to position the spring-teeth just below the blowers and rotate them by 90°. For this to be effective, the advance time t1 of the harvester needs to be equal to the period of rotation t2 of the disturbing roller.
where V, R, and N represent the forward speed of the harvester (m·s−1), radius of rotation of the disturbing roller (m), and rotational speed of the disturbing roller (rpm), respectively.
It is calculated that
According to Equation (3), to make spring-teeth appear just below the blowers after the rotation of 90° intended to enhance the collection effect, the rotational speed of the disturbing roller should be related to the radius of rotation of the disturbing roller and the forward speed of the harvester.
The radius of rotation of the disturbing roller needs to be designed according to the diameter of the spherical seed heads of dandelion. It can be seen from Table 2 that the diameter of spherical seed heads is 4~6 cm; that is, the radius of rotation of the disturbing roller is
where R is the radius of rotation of the disturbing roller (m); r is the radius of the rotation shaft of the disturbing roller (m); and d denotes the diameter of the spherical seed heads of dandelion plants (m).
The diameter of the rotation shaft of the disturbing roller is set to be 3 cm by comprehensively considering the feasibility of the entire design and the dimension reliability of the disturbing roller. That is, R ≥ 4.5 cm, then R = 5 cm, the horizontal length of the spring-teeth is 3.5 cm, and the diameter of the rotating shaft of the disturbing roller is 3 cm. Under these conditions, the rate of rotation of the disturbing roller is only related to the forward speed; that is, the rate of rotation of the disturbing roller N is 5V (where V is the forward speed).
At the same time, the selection of materials for producing spring-teeth on the disturbing roller is also critical. At present, the most widely used materials for producing spring-teeth include metals, plastics, and nylons. Compared with other materials, metal spring-teeth are hard and heavy; plastic spring-teeth are light while having poor toughness, which is likely to damage dandelion plants; and nylon spring-teeth are light, which reduces the load on the motor, and they are also highly elastic, tough, and hard to break, showing good performance for their cost. Considering this, nylon was selected to produce spring-teeth on the disturbing roller.
3.2.2. Design of Negative-Pressure Blowers
By measuring the material characteristics of dandelion seeds, the average values of the long and short axes of dandelion seeds were found to be 3.096 and 0.588 mm, respectively, and the suspension speed of dandelion seeds with pappi was found to be about 0.82 m·s−1. Due to their characteristically small volume, light weight, and slow suspension speed, it is appropriate to collect dandelion seeds using negative-pressure blowers.
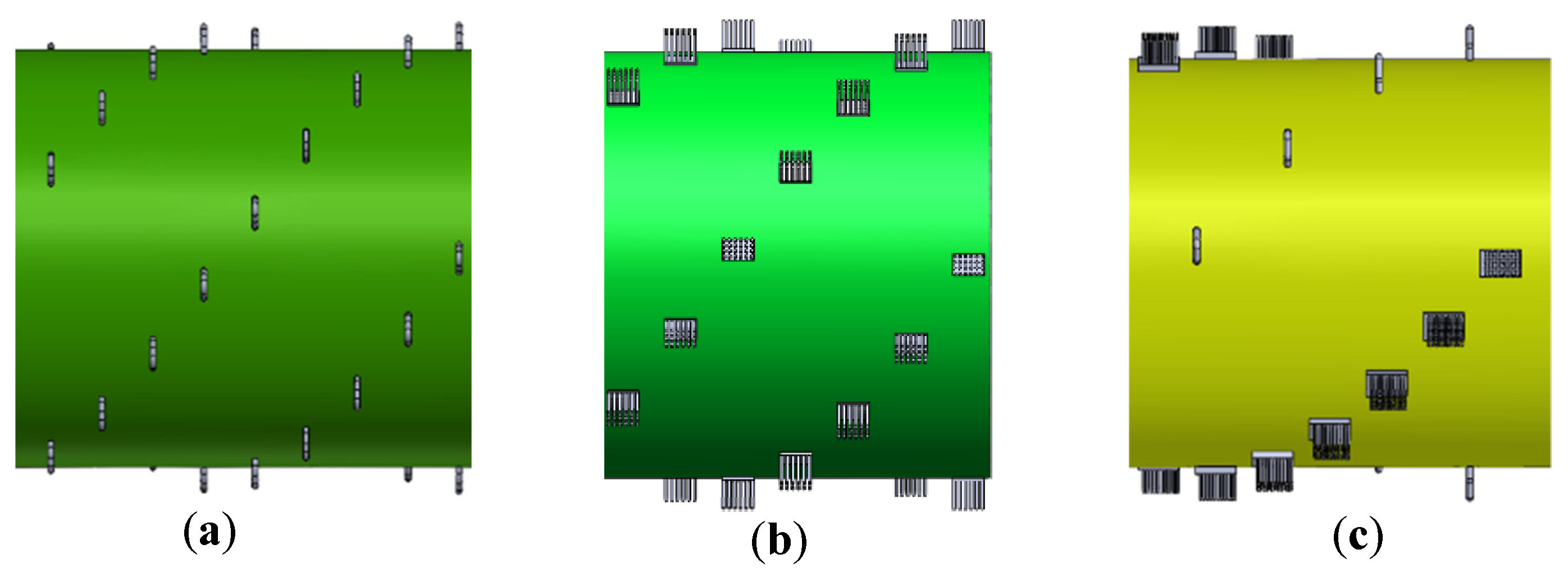
In this paper, based on the planting agronomic requirements of dandelion plants, the row spacing used was 15 cm, the harvester was designed to harvest the seeds of eight rows of dandelion plants at one time, and the fan was used for negative pressure harvesting. Three schemes of collecting devices were designed. The first scheme consists of a small fan used to harvest two rows of dandelion seeds and four small fans used to harvest eight rows. The second scheme uses a larger fan to harvest four rows at a time and uses two larger fans to harvest eight rows; the third scheme involves installing a small fan in the middle and back of the adjacent two fans of the first scheme and harvesting the dandelion seeds missing from the front fan. Three blower layouts shown in Figure 6 were preliminarily designed, and the optimal one needed to be selected from these layouts. The harvesting breadth was 120 cm, and the maximum diameters of blowers at the small and large feed ports were 30 and 60 cm, respectively. The layout and reliability of the blowers and the specifications of common blowers on the market were considered. Figure 6a shows the single-row layout of four blowers with diameters of 24 cm; Figure 6b illustrates the single-row layout of two blowers with diameters of 50 cm; Figure 6c presents the double-row staggered layout of seven blowers with diameters of 24 cm.
3.3. Flow-Field Simulation of the Collection Devices
The collection devices are key devices used to harvest dandelion seeds using the dandelion seed harvester. The objective of improving the collection rate of dandelion seeds can be achieved through the reasonable design and improvement of the collection devices. The size and layout of air inlets greatly influence the collection quality. Through flow-field simulation in the collection covers with the three designed blower layouts using Fluent software, flow fields in the three structures at different wind velocities were compared and analyzed. In this way, the optimal structure of the collection devices was determined [21,22], providing a basis for field harvesting tests.
3.3.1. Mesh Generation
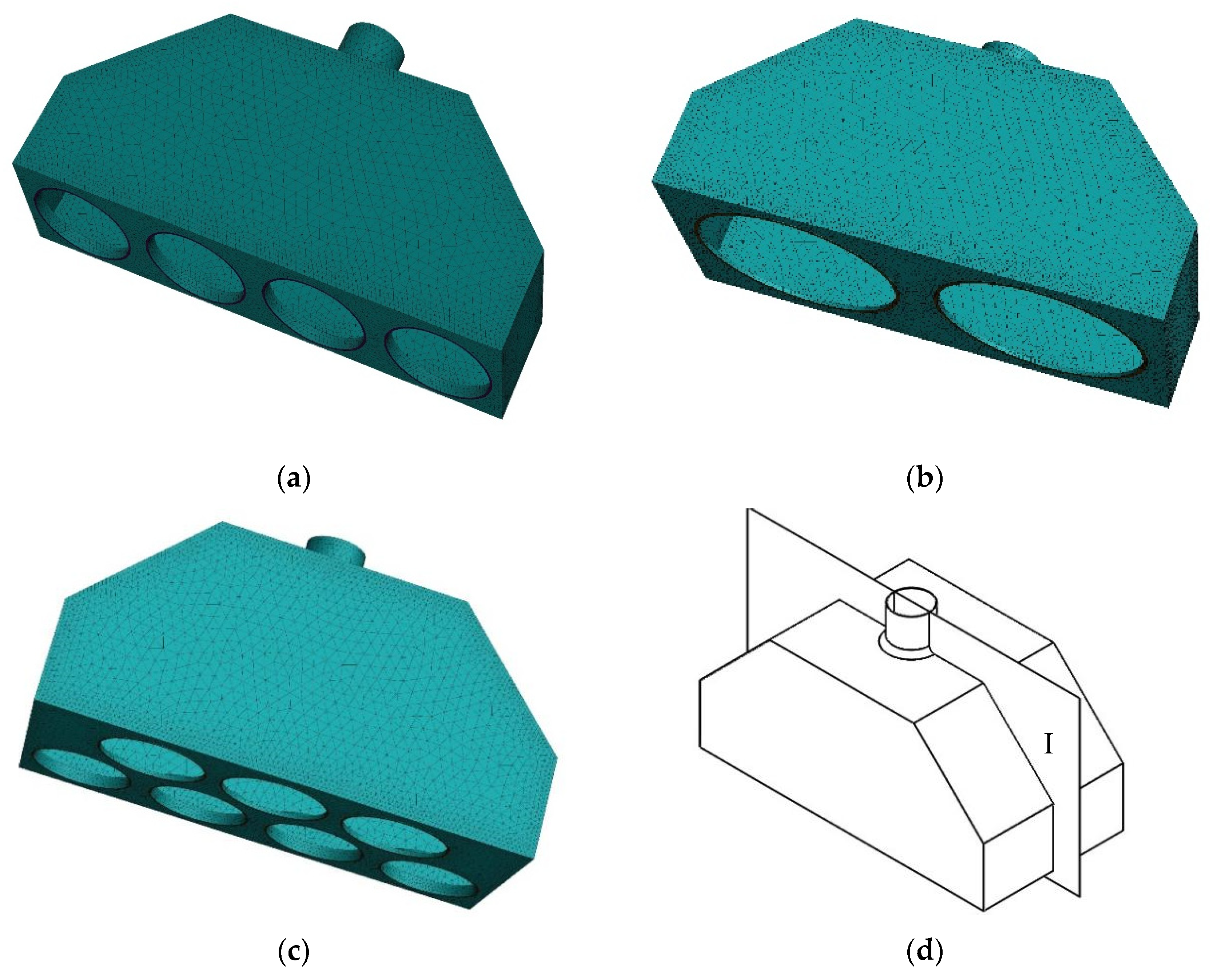
The 3D modelling and mesh generation were performed for collection covers with the three different blower layouts, as illustrated in Figure 7.
As displayed in Figure 7d, when simulating flow fields in the collection covers, a cross-section Ⅰ passing the axis of air outlet was selected to observe and analyze the velocity nephograms in flow-field simulation. The velocity vector diagrams of the entire collection covers were observed and investigated to better understand the motion of airflows in the collection covers.
3.3.2. Simulation Results and Analysis
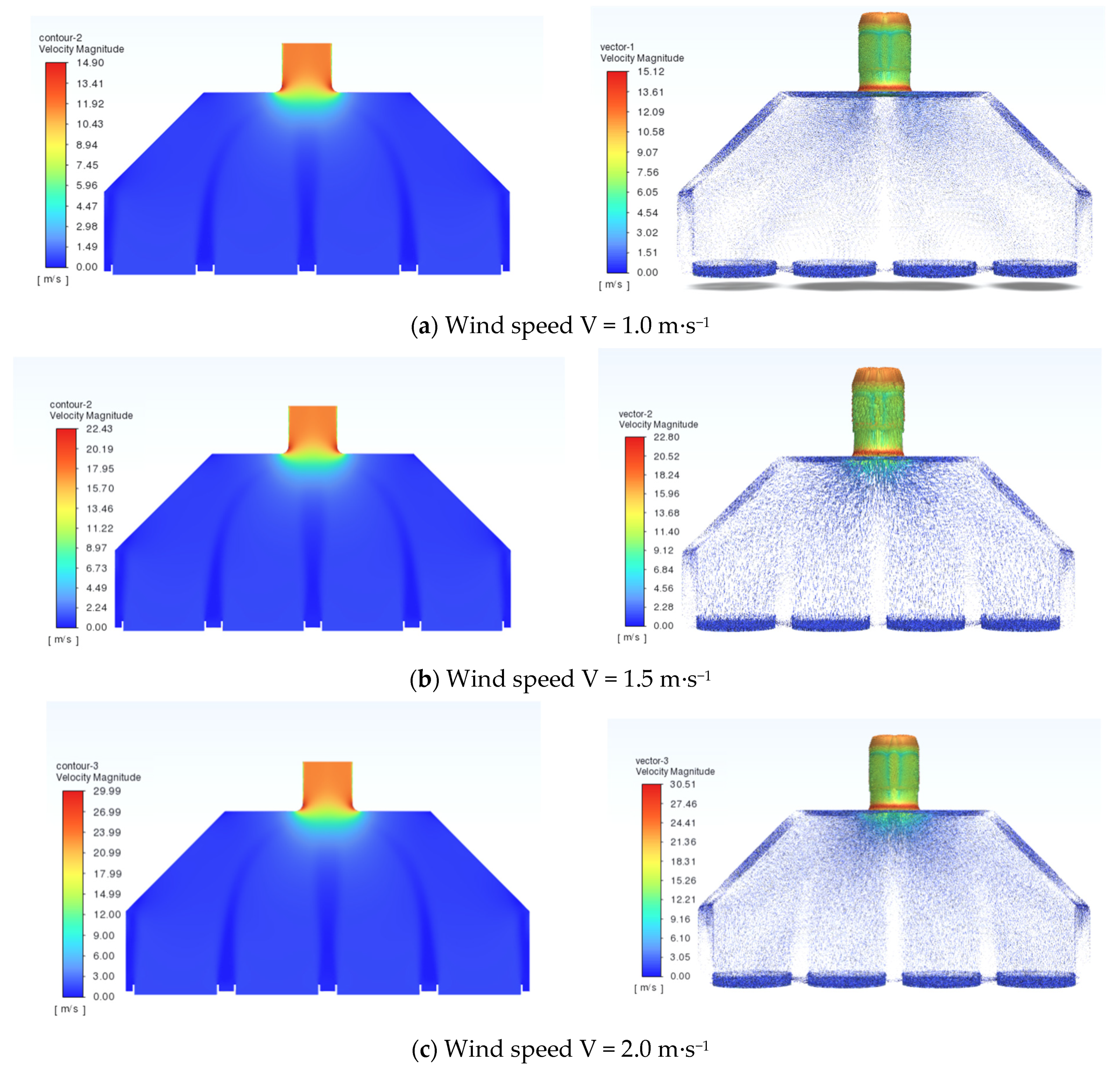
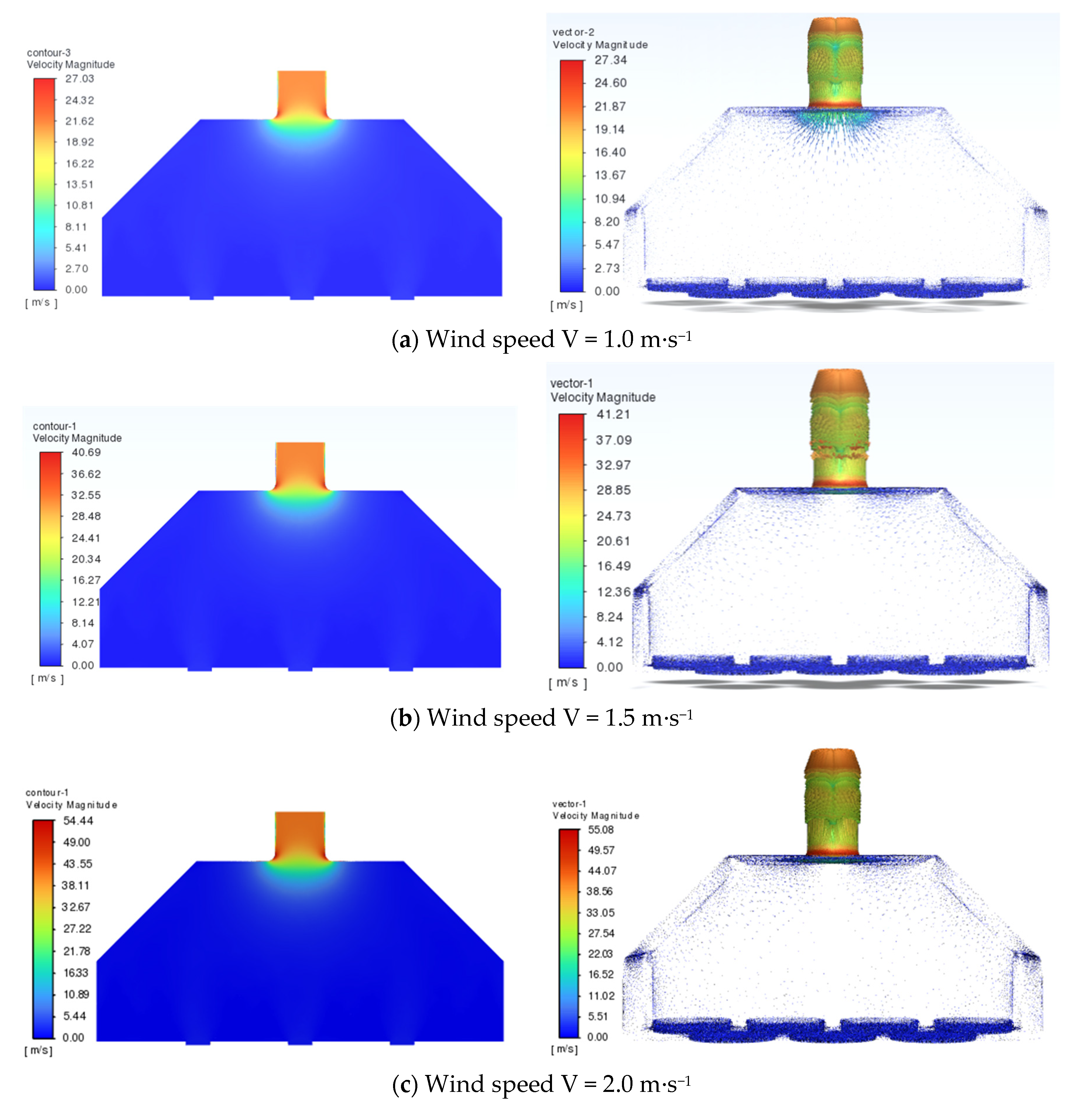
Figure 8 shows the velocity nephograms and velocity vector diagrams of the collection devices with the single-row layout of small blowers that rotate at 1.0, 1.5, and 2.0 m·s−1. The velocity nephograms demonstrate that the velocity changes slightly in adjacent areas in the collection cover and is uniform while the amount of air at the air outlet is large; thus, the wind velocity is fastest there. As displayed in velocity vector diagrams, the airflow field in the collection cover varies slightly with changes in the wind velocity. Roughly two flow directions are observed at the air inlet: part of the airflow moves towards the outlet while the residue converges with the other part of airflow after being reflected by the wall of the collection cover to flow from the air outlet. This indicates that the intake air is confluent in the collection cover.
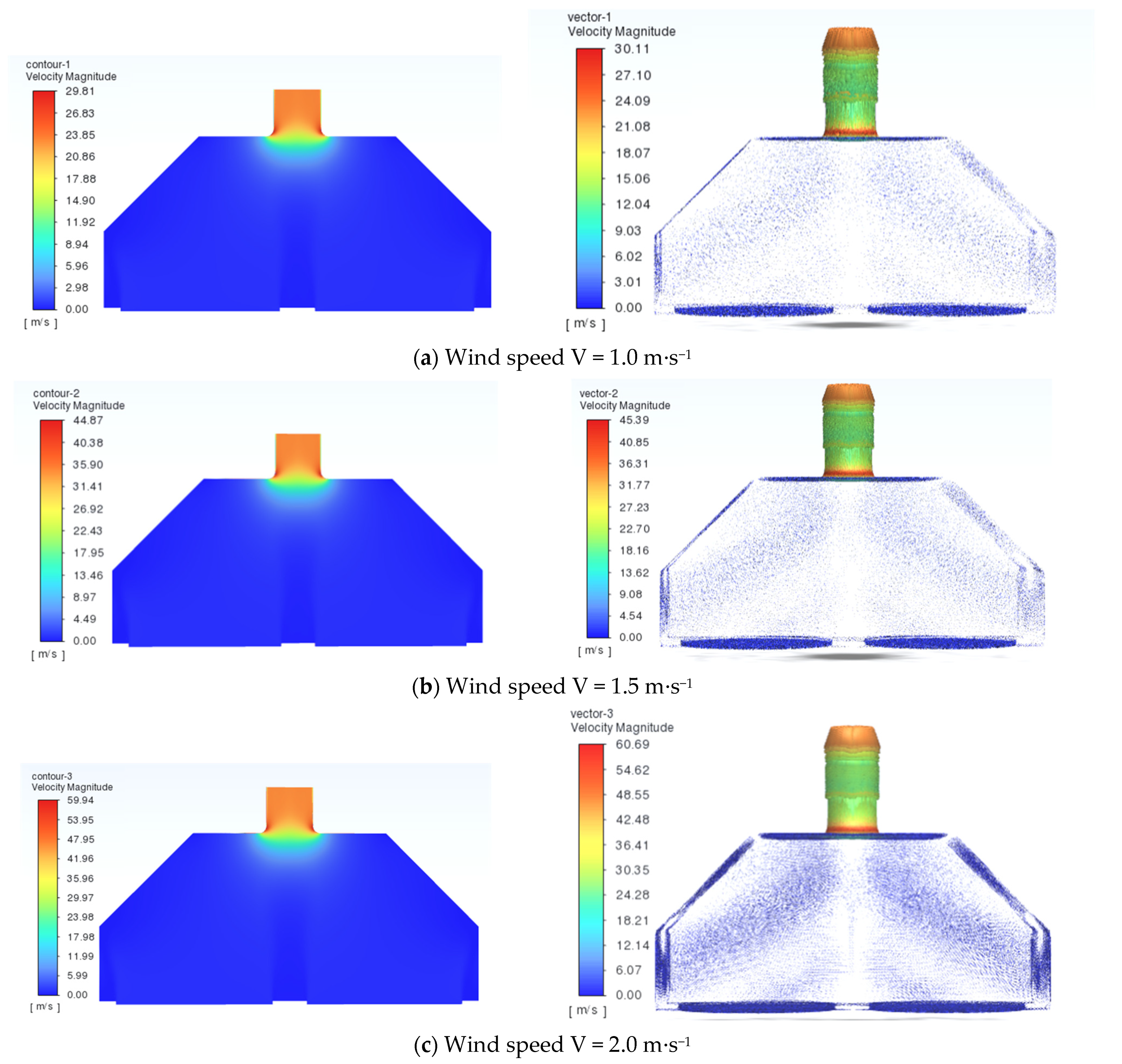
Figure 9 illustrates the velocity nephograms and velocity vector diagrams of the collection devices with the single-row layout of large blowers that rotate at 1.0, 1.5, and 2.0 m·s−1. The velocity vector diagrams show that airflow is poorly confluent in the collection devices with the single-row layout of large blowers, and a large blank area of airflow can be seen in the center. The airflow entering the collection cover from the air inlet does not converge well with the airflow in other directions, which flows towards the air outlet after being reflected at the wall. Instead, some air flows obliquely downward after reflection at the wall, which disturbs the flow field in the collection cover and inhibits airflow at the air inlet, slowing its progress into the collection cover. As a result, the collected dandelion seeds are less readily passed out in the collection process.
Figure 10 shows the velocity nephograms and velocity vector diagrams of the collection devices with the double-row layout of small blowers that rotate at 1.0, 1.5, and 2.0 m·s−1. Analysis of the velocity nephograms reveals that the velocity changes little and is uniform in the collection cover, while there is a significant difference in wind velocities at the inlet and outlet. By observing the velocity vector diagrams, it was found that there is a large blank area of airflow in the collection cover with the double-row layout of small blowers. In addition, the same problem that arose in the collection devices with the single-row layout of large blowers also arises in this layout. That is, some air flows downward after being reflected by the walls, which disturbs the flow field in the collection cover and inhibits the otherwise smoother inflow of air at the air inlet to the collection cover.
Comprehensive analysis of the flow-field simulation results of collection devices with the three blower layouts indicates that the single-row layout of small blowers shows the best effect compared with the other two layouts. The layout enables smooth motion of airflow, meets requirements for collecting and transporting dandelion seeds, saves materials, and is easily machined. The wind field generated by the fan in Figure 7b is large and not concentrated in the lower part of the collection device. The collection rate in the pre-test is small, and it is easy to inhale other impurities into the machine. In the pre-test, the rear fan of the collection device shown in Figure 7b collects fewer seeds, and the overall collection rate is almost the same as that shown in Figure 7a. During the pre-test verification of the collection rate of the three schemes, it was found that the collection device of the style shown in Figure 7a had a higher collection rate than the other two schemes, and that the airflow in the flow field was stable and the cost was low. In summary, we chose the collection device of the style shown in Figure 7a.
3.4. Design of the Separation Devices
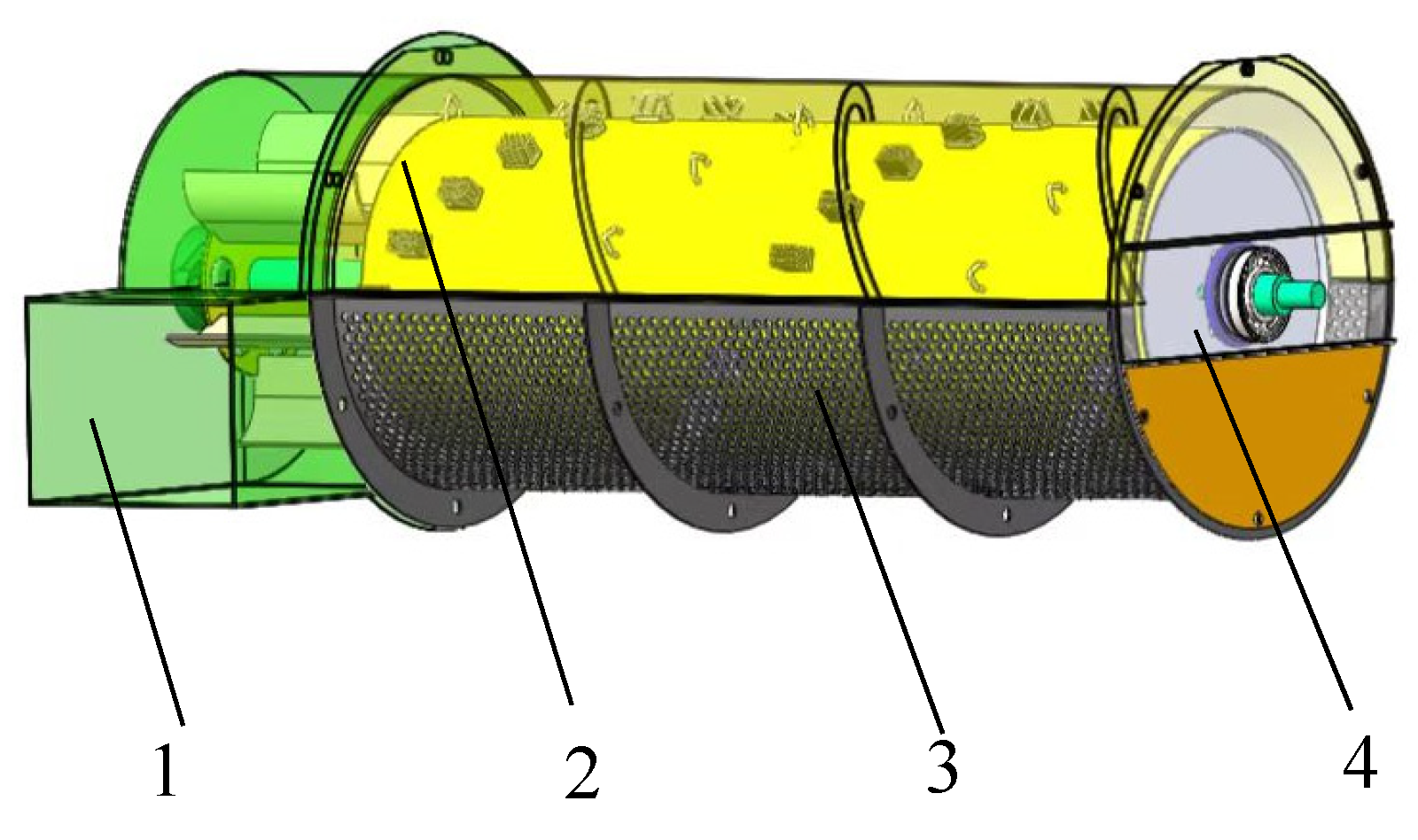
Separation is an important process to separate dandelion seeds from pappi so as to obtain dandelion seeds [23]. The separation devices include an impurity removal mechanism, a cap, a concave board for separation, and a separation drum. Figure 11 shows the 3D structure of the separation devices.
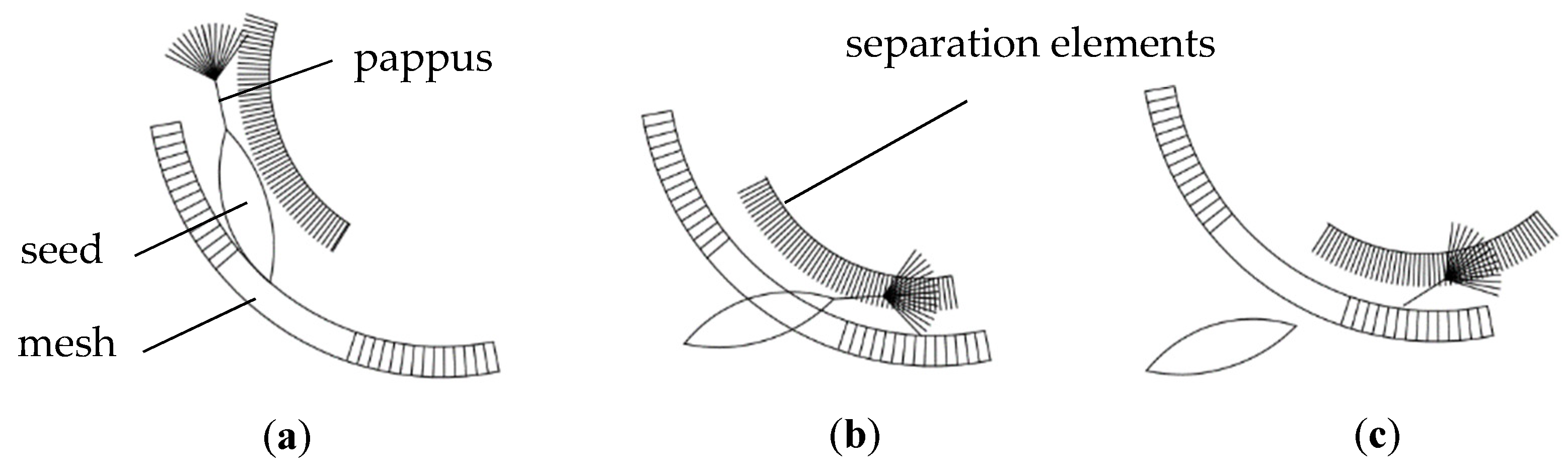
After entering the separation devices, dandelion seeds with pappi are separated from pappi under the action of the separation elements [24]. The separated seeds fall in the seed storage tank through the concave board, as shown in Figure 12. Finally, pappi are discharged from the harvester via the impurity removal mechanism, thus completing the seed–pappus separation stage. This overcomes the difficulty in seed–pappus separation, addresses low separation efficiency, and reduces the potential for harm to operators often caused during the manual separation of pappi.
3.4.1. Design of the Separation Drum
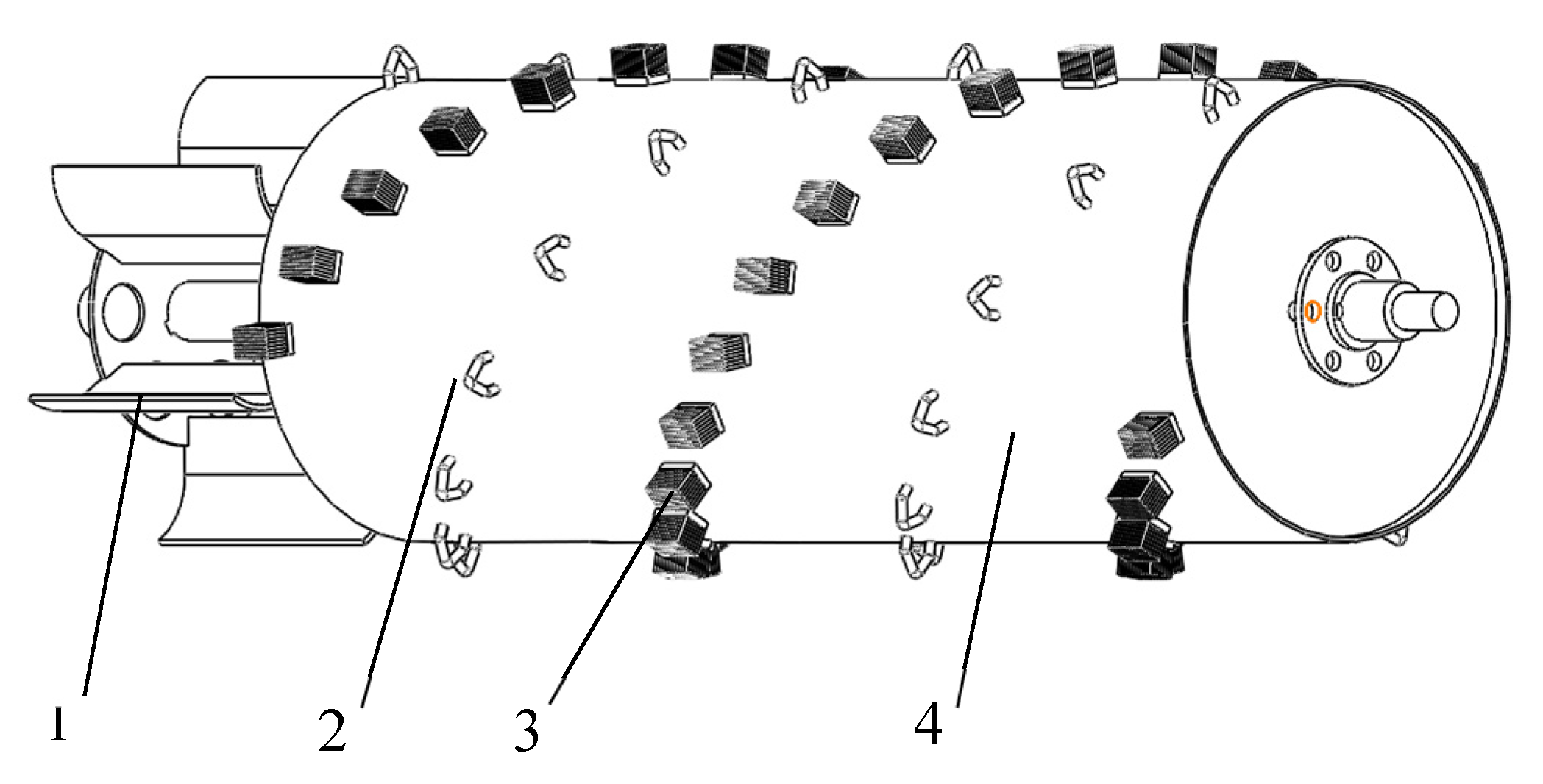
Optimal design of the separation drum can promote efficient seed–pappus separation [25,26]. Seeds with pappi are light and easily affected by the wind as they float. This makes it difficult to bring the seeds into contact with the separation drum to separate seeds from pappi. Therefore, the separation drum is designed as a closed drum (Figure 13), which narrows the space available to the seeds with pappi and to some extent solves the problems of floating, small contact areas with the separation drum and concave board, and low contact probability of seeds [27]. It also improves the separation efficiency of pappi and seeds, increases the separation rate, and reduces impurities in the harvest.
Through comparison with separation devices of other harvesters and through combining the special material characteristics of dandelion seeds, the separation elements were designed as hairbrushes and wire-loops. Dandelion seeds with pappi were separated from pappi by the wire-loops and hairbrushes distributed on the drum, thus yielding pure dandelion seeds. The layouts of the separation elements exert a significant influence on the separation effect of pappi and seeds. To explore the optimal layout of separation elements, three element layouts (Figure 14) were designed to select the better combination through pre-testing. Figure 14a–c separately shows the spiral layouts of only wire-loops distribution, only brush distribution, and cross distribution of bow tooth brushes [28,29].
Furthermore, the selection of materials for producing the hairbrushes and wire-loops can also heavily influence the separation effect of pappi and seeds. Commonly used materials to produce hairbrushes include polybutylene terephthalate (PBT) fibers, bristles, nylon fibers, polypropylene (PP) fibers, and metal wires. Among them, PBT fibers and bristles are so soft that the separation effect cannot meet the operation requirement; PP fibers show poor elasticity and cannot recover all imposed long-term deformations, hindering the separation of pappi and seeds; metal wires are hard; and nylon fibers exhibit moderate hardness, favorable elasticity, and cost-effective performance, so nylon was also used to fabricate hairbrushes on the separation devices. Wire-loops are commonly made with metal (steel or iron). In the present study, steel was selected to produce the wire-loops.
The length of the separation drum is closely related to its separation capacity: the longer the drum, the longer the separation time and the higher the separation rate [30]. The length of the separation drum in the separation part is calculated using the following formula:
where L represents the length of the separation drum (m); q denotes the feed quantity of the separation devices (kg/s) and is set to 0.5 kg/s in the present research; and q0 is the designed allowable feed quantity per unit length of the separation drum (kg/(s·m)) and is set to 0.5~0.8 kg/(s·m).
From Equation (2), the length L of the separation section of the separation drum is 0.63~1.0 m and it is set to 1.0 m here. Therefore, the length of the separation section of the drum is 1.0 m.
If the diameter of the separation drum is too small, only small amounts of seed–pappus mixtures are allowed to enter the drum, and the contact area between the mixtures and the concave board narrows [31], reducing the time taken for the separation of dandelion seeds from pappi. At present, the diameter of commonly used separation drums is 550~650 mm. The greater the diameter, the greater the feed quantity that can be sustained, although the heavier the load. Compared with the harvesting of wheat and rice, the feed quantity of dandelion is not that large. The diameter of the separation drum satisfies
where is the tooth root diameter of the drum (mm) and is the height of the high separation elements (mm).
Generally, ≥ 300 mm. Considering the separation effect and the feed quantity of dandelion seed–pappus mixtures, was determined to be 300 mm. To avoid collisions of wire-loops with bafflers on the cap, the heights of wire-loops and hairbrushes were separately set to be 35 and 50 mm. The diameter of the separation drum was then calculated to be 400 mm using Equation (3).
By conducting pre-tests on the separation drum, the separation effects of the separation drums with the three different element layouts were verified. The results show that the combined layout of hairbrushes and wire-loops allows the optimal separation effect of the separation drum and the significant separation effect of seeds and pappi. That is, the combined layout of hairbrushes and wire-loops was selected for separation elements on the separation drum; the length of the drum separation section is 1.0 m, and the diameter of the separation drum is 400 mm.
3.4.2. Design of the Concave Board
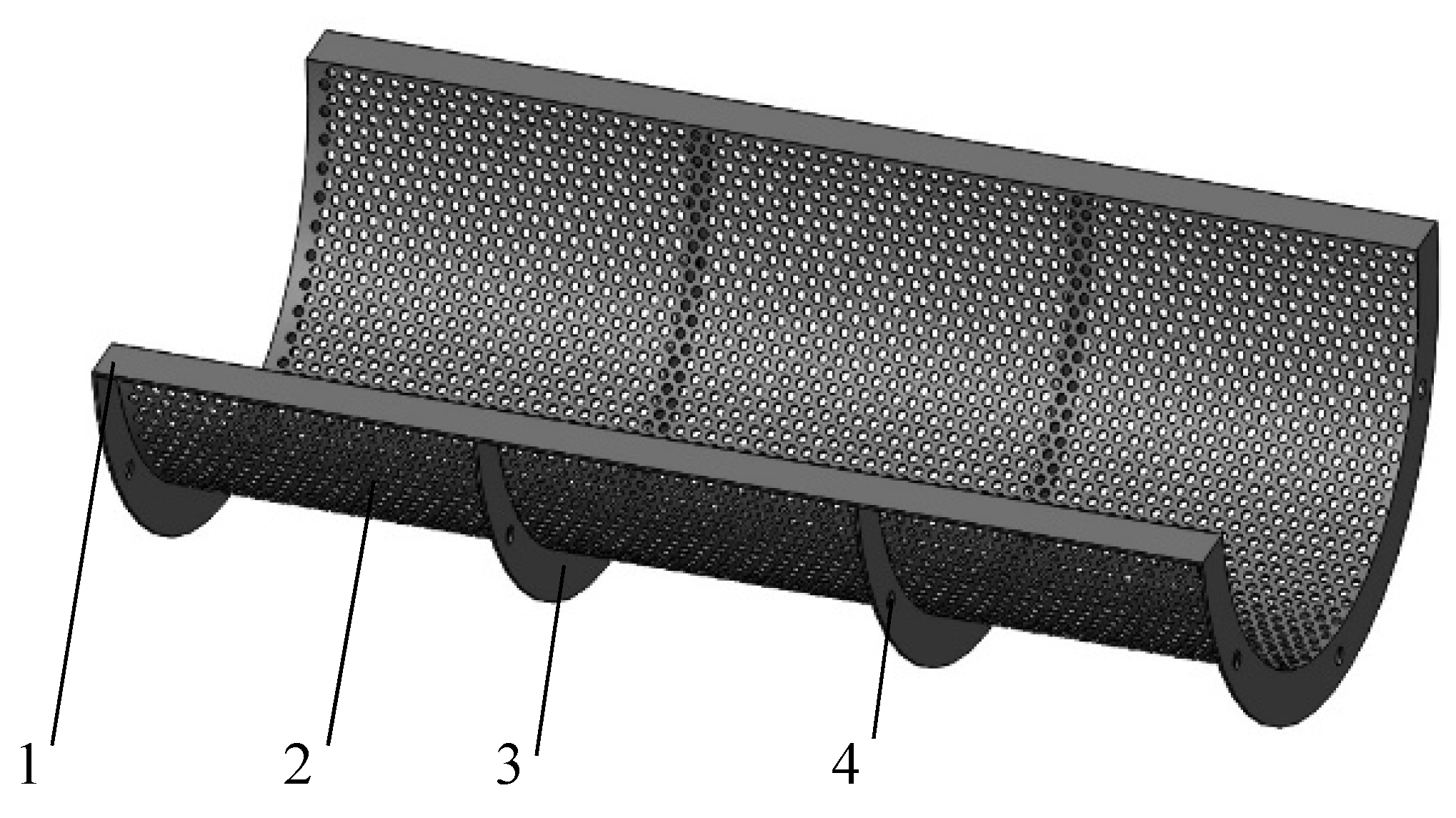
The concave board mainly consists of a perforated screen, a connecting plate with the upper cap, and an arcuate side-plate [32,33]. Holes are distributed uniformly on the perforated screen (Figure 15). To enable better contact of seed–pappus mixtures with the drum and convenient separation of seeds from pappi, the wrap angles of the concave board for separation are designed to be 180°; that is, the concave board is hemi-cylindrical. One end of the concave board is connected to the transmission pipeline, while the other end is connected to the impurity-removal device to coordinate with the separation drum to separate pappi from seeds and allow seeds to pass through the holes in the screen. In the meantime, pappi are retained on the concave board and discharged from the harvester via the impurity removal mechanism during the rotation of the separation drum.
The screening effect of the perforated screen is closely related to porosity of the screen, which is influenced by the hole shape, size, and layout. Dandelion seeds resemble paddy rice in appearance, both of which are elliptic. Considering the shape and passing performance of seeds through the perforated screen, round screen holes were designed; because dandelion seeds are generally 0.30~0.47 cm long, the screen holes are circular with a diameter of 0.5 cm.
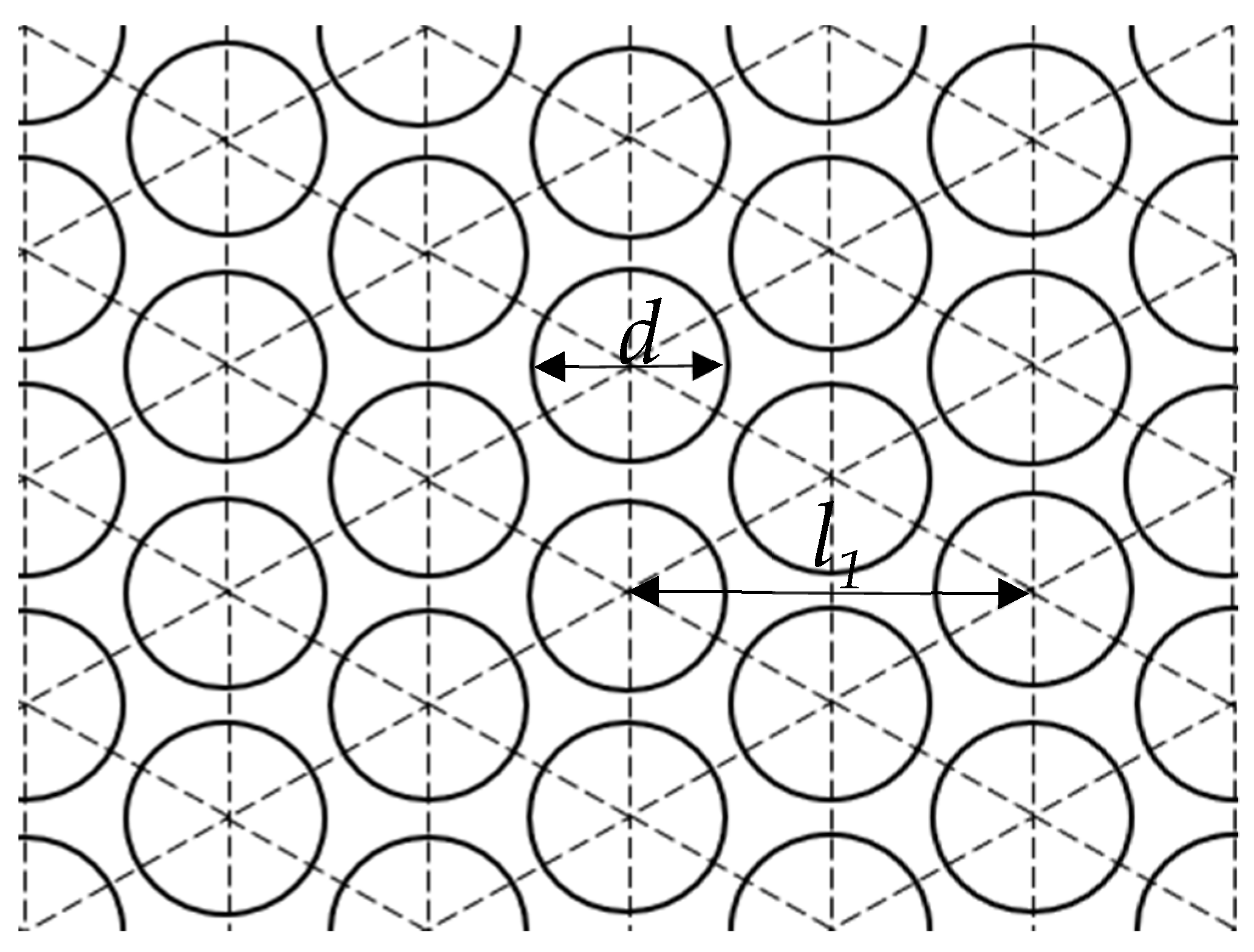
The more porous the screen, the better the screening effect and the more seeds that pass through the screen. Therefore, screen holes are distributed in the form of equilateral triangles that enable high porosity (Figure 16). If the hole diameter d is 0.5 cm and the spacing between two adjacent holes l is 0.1 cm, the center-to-center spacing of two adjacent holes l1 is 0.6 cm. The porosity K of the screen is
where K is the porosity of the screen (%); d is the hole diameter on the screen (cm); and l1 is the center-to-center spacing between two adjacent holes (cm).
4. Field Tests
4.1. Test Conditions
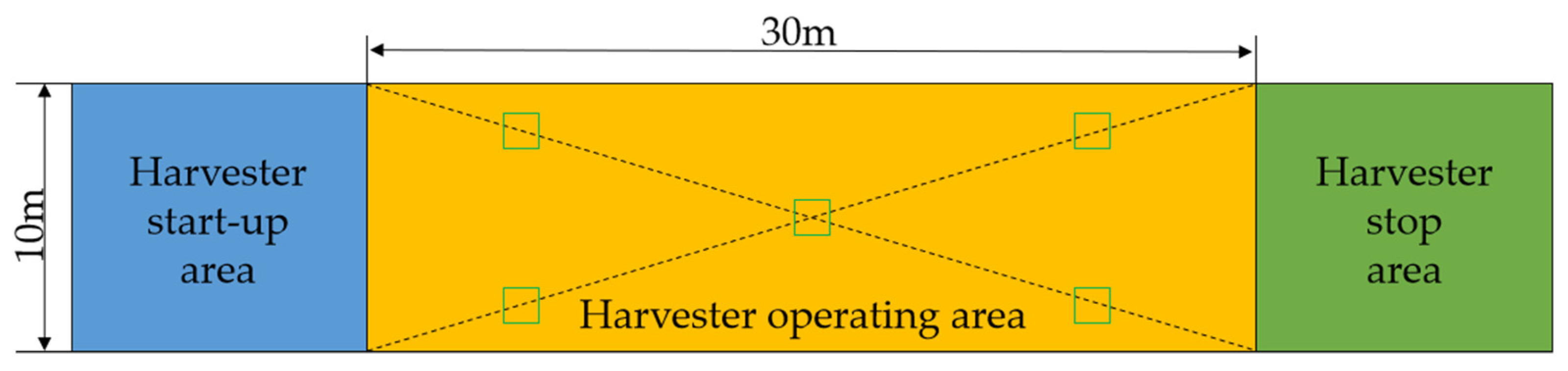
Field tests on dandelion seed harvesting were conducted in a dandelion planting base at the Changyuan branch of the Henan Academy of Agricultural Sciences (Xinxiang City, Henan Province, China) [34]. The planting base was situated on a flat terrain, where dandelion plants grow well. The key parameters of dandelion plants and seeds were measured in the experimental field by measuring instruments. Dandelion plants have an average row spacing of 15 cm, an average height of 40 cm, and a seed moisture content of 9.82%. The growth cycle of dandelion was 3 months. A region some 30 m long and 10 m wide was selected from within the planting base as the harvesting test region. In addition, a harvester starting area and a parking area were also reserved on both sides of the test region (Figure 17).The photos of dandelion plants and dandelion seed crowns are shown in Figure 18.
The test instruments and devices include the self-propelled dandelion seed harvester, an anemograph, a tape, an electronic scale, a digital camera, and a rev-counter.
4.2. Harvesting Tests
4.2.1. Test Methods
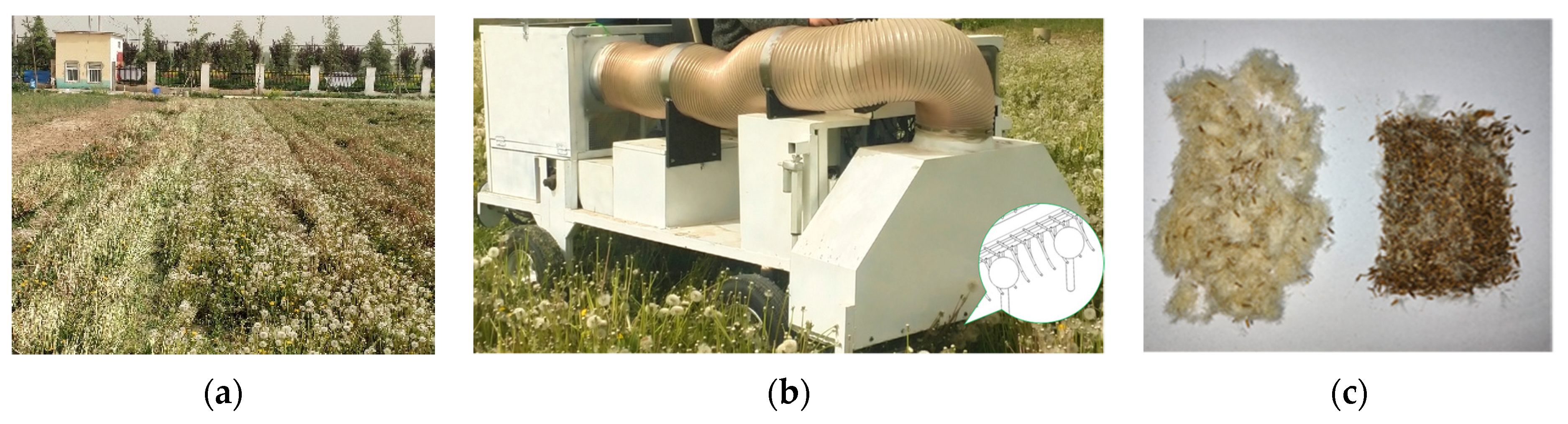
The harvesting tests were conducted to assess the effects of varied test operating parameters of the collection and separation devices to explore the influences of the forward speed, wind velocity at the air inlet, and rate of rotation of the drum on the harvesting effect. Meanwhile, the operating quality of the harvester was verified, and the harvesting quality was reflected by measuring the collection rate. The main performance evaluation index was the rate of collection of dandelion seeds. The performance test of the harvester is shown in Figure 19.
The collection rate was measured using the following method: in the test region, the harvester was driven to harvest the seeds of all dandelion plants; after harvesting, the dandelion seeds in the seed storage tank were removed and weighed (recorded as ); as shown in Figure 17, five sampling points measuring 1 m2 were selected artificially using the five-point sampling method in the test region to collect unharvested dandelion seeds left by the harvester; these seeds were separated from pappi and weighed (recorded as ).
The rate of collection is calculated using the following equation:
where is the collection rate of dandelion seeds using the harvester (%); is the mass of dandelion seeds in the seed storage tank after harvesting (g); and represents the mass of unharvested dandelion seeds left by the harvester at sampling points (g).
4.2.2. Test Design
Herein, the influences of the forward speed, the rate of rotation of the blowers at the feed port of the collection devices, and the rate of rotation of the drum on the harvesting effect of the harvester were discussed. To this end, taking the forward speed, wind velocity of blowers, and rate of rotation of the drum as test factors, quadratic regression orthogonal rotating combination tests were conducted. Combined with the pre-test data and material characteristics of dandelion seeds, the test ranges of the forward speed, wind velocity at blower inlets, and rate of rotation of the drum were set to 0.8~1.2 m·s−1, 1.0~2.0 m·s−1, and 300~500 rpm [35], respectively. The test factors are numbered (Table 3) and the simulation test schemes and results are listed in Table 4.
4.3. Test Analysis
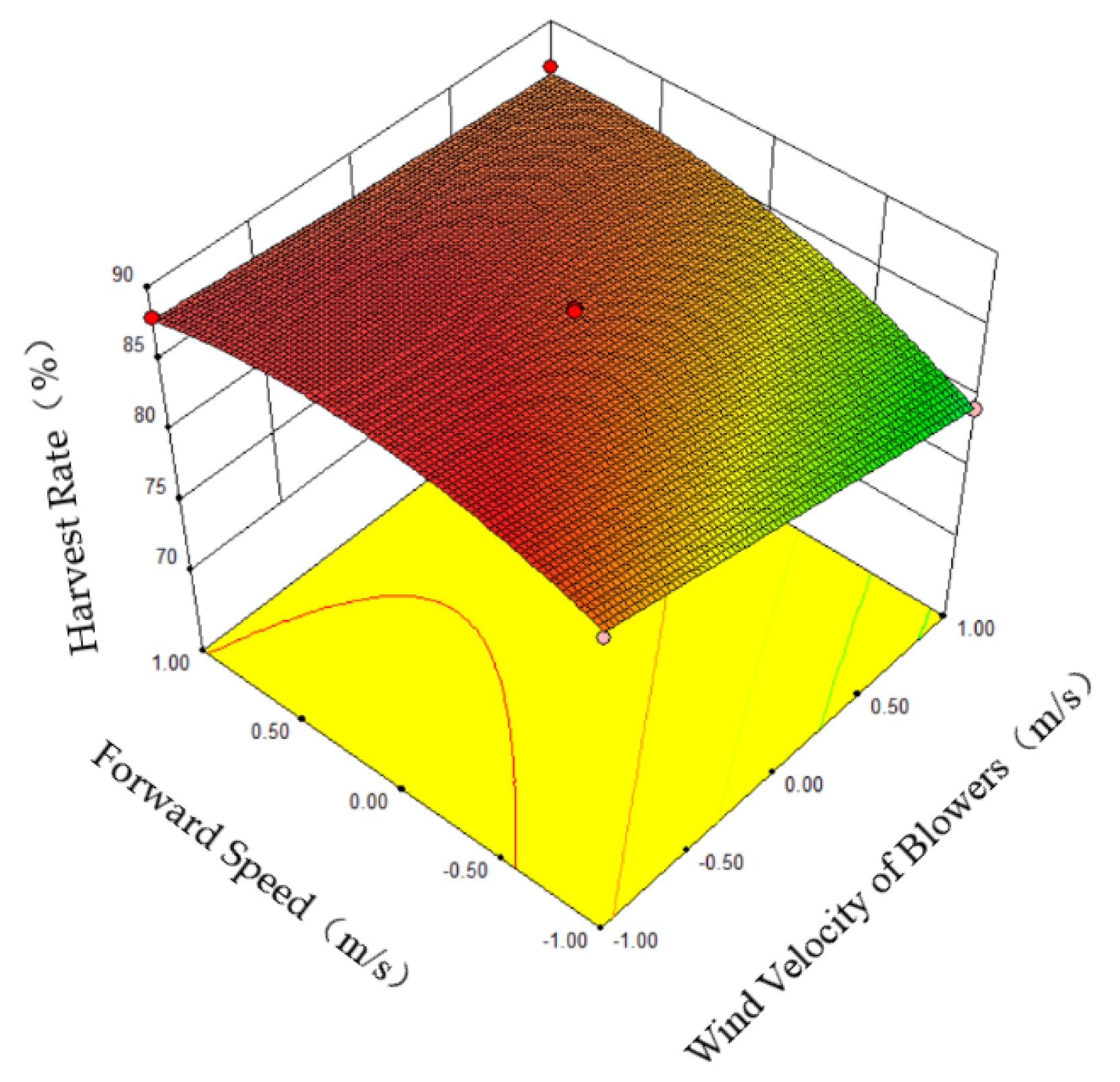
Software Design-Expert 8.0 was adopted to perform variance analysis of data in Table 4 and results are listed in Table 5 [36]. It can be seen from Table 5 that the test model is extremely significant (p < 0.0001), suggesting that the designed tests are reasonable and effective; the coefficient of determination R2 is 0.9626, indicative of a high degree of fitting of the regression equation. The forward speed, wind velocity of blowers, and rate of rotation of the drum all significantly affect the collection rate (p < 0.05). The interaction term between the forward speed and wind velocity of blowers exerts significant influence on the collection rate; the interaction term between the rate of rotation of the blowers and drum also has a significant influence. The response surfaces of the influence of the interaction terms of the test factors on the collection rate are illustrated in Figure 20 and Figure 21. Through a multiple regression of the test results, the regression equation of the collection rate can be obtained as follows:
4.4. Optimal Parameters
Taking the maximization of the collection rate as the objective, the optimization module in software Design-Expert 8.0 was used to solve the regression equation, thus determining the optimal solution. The equation set of the objective and constraints is expressed as Equation (10).
According to the optimized results, the optimal working parameters of the dandelion seed harvester were selected as follows: a forward speed of 0.8 m·s−1, a wind velocity of blowers of 1.63 m·s−1, and a rate of rotation of the drum of 418.7 rpm (rounded to 419 rpm). After adjusting the relevant parameters of the harvester, harvesting tests were conducted in which the collection rate reached 89.1% (as expected based on experimental evidence).
5. Discussion
Through global analysis of the test process and results of the dandelion seed harvester, the deficiencies in the harvesting quality were investigated:
- Environmental influences:Under strong external natural wind, the blowers fail to draw all falling seeds into the harvester, which may cause a collection loss. If the ground is rough, seeds falling off under the disturbance of the disturbing roller cannot be collected due to the rugged ground and long distance from the blowers that results in inadequate wind strength, thus inducing the collection loss.
- Inconsistent maturity:Dandelion seeds have different degrees of maturity: in the maturation period of dandelion seeds, the plants mature quickly and near-simultaneously, whereas the maturation period of the seeds is very short, so the seeds need to be harvested timeously. In the harvesting process, some immature seeds may be entrained, and thus have a high moisture content and a strong connection to the pappi. Therefore, the separation devices cannot timeously and effectively separate the immature dandelion seeds from the pappi, which decreases the separation rate, reducing the yield.
- Degree of proficiency of drivers:The degree of proficiency of drivers for the dandelion seed harvester exerts certain influences on the harvesting quality. If the driver is less adept, the normal operation of the harvester cannot be guaranteed, thus inducing a lower harvesting quality. Improving the proficiency of drivers for the harvester provides certain assistance in increasing the harvesting efficiency and quality.
6. Conclusions
- At present, there are few dandelion seed harvesters available, while manual harvesting of dandelion seeds calls for high labor intensity, is inefficient, and may induce a large loss of yield. To overcome these problems, a self-propelled dandelion seed harvester was designed. The harvester is mainly composed of collection devices, separation devices, transmission devices, and a rack. The harvester has the ability to collect and separate dandelion seeds.
- Important working parts, namely, the collection and separation devices of the harvester, were designed. The collection devices include the disturbing roller, collection cover, height-regulating device, and negative-pressure blowers. They are responsible for collecting dandelion seeds. The operating breadth of the harvester is 1.2 m. The operating height, forward speed, wind velocity of the blowers, and rate of rotation of the drum are adjustable within 0.35~0.45 m, 0.8~1.20 m·s−1, 1.0~2.0 m·s−1, and 300~500 rpm, respectively. The separation devices include the separation drum, concave board for separation, and impurity removal device, responsible for separating dandelion seeds from pappi. The length, diameter, and rate of rotation of the drum are 1.15 m, 0.4 m, and adjustable within 300~500 rpm, respectively.
- To explore the optimal working performance of the dandelion seed harvester, multi-factor field tests were performed. Field tests show that the harvesting effect is optimal under the following conditions: a forward speed of 0.8 m·s−1, a single-row layout of small blowers, a wind velocity of blowers of 1.63 m·s−1, a combined layout of separation elements (hairbrushes and wire-loops), a rate of rotation of the drum of 419 rpm, and the use of a perforated screen with circular holes on the concave board. The rate of collection of dandelion seeds reached 89.1%, which reaches the expected harvesting effect desired in the design of the dandelion seed harvester.
Author Contributions
Conceptualization, Z.Q. and Q.L.; methodology, Z.L. and L.L.; investigation, Z.Q. and L.L.; resources, X.W.; data curation, Q.L. and H.S.; writing—original draft preparation, Z.Q. and Q.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Key R&D Program of China (2019YFD1002602) and Henan Province Science and Technology Research (212102110217).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data used to support the findings of this study are available from the corresponding author upon request.
Acknowledgments
The authors would like to thank their college and the laboratory, as well as gratefully appreciate the reviewers who provided helpful suggestions for this manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhou, R.L.; Lu, F.; Qin, L.L. Nutrition and health care function of dandelion. Food Nutr. China 2011, 17, 71–72. [Google Scholar]
- Gonzalez-Castejon, M.; Visioli, F.; Rodriguez-Casado, A. Diverse biological activities of dandelion. Nutr. Rev. 2012, 70, 534–547. [Google Scholar] [CrossRef]
- Gu, L.W.; Wang, L.; Zhang, H.; Guan, H.B.; Zheng, Y. Nutritional value of dandelion and its development and utilization prospect. Jilin Veg. 2013, 4, 13–14. [Google Scholar]
- Ruiz-Juarez, D.; Melo-Ruiz, V.E.; Gutierrez-Rojas, M.; Sanchez-Herrera, K.; Cuamatzi-Tapia, O. Nutrient Value in Dandelion Flower (Taraxacum officinale). Ann. Nutr. Metabolism. 2020, 76, 102. [Google Scholar]
- Hao, W.L.; Mu, C.C. The medicinal value of fresh dandelions. J. Benef. Readiness Drug Inf. Med. Advices 2017, 65–66. [Google Scholar]
- Chen, R.J.; Wang, Q.Y.; La, X.J.; Li, J.A.; Liang, G.T.; Cao, H.J.; Wang, Y.Y.; Zhang, M. Advances in medicinal research of dandelion. Mod. J. Integr. Tradit. Chin. West. Med. 2021, 30, 563–567. [Google Scholar]
- Zhao, L.; Yang, Y.J.; Lin, D. Economic value of dandelion. Liaoning Agric. Sci. 2006, 33–35. [Google Scholar]
- Inner Mongolia Academy of Agricultural & Animal Husbandry Sciences. A New Handheld Dandelion Seed Harvestingdevice:CN212184213U[P]. Available online: https://patents.google.com/patent/CN212184213U/zh (accessed on 22 December 2020).
- Zhang, Y. Cross-Walking Remote-Controlled Dandelion Seed Harvester Based on the Principle of Vacuum Cleaner: CN214282208U [P]. Available online: https://patents.google.com/patent/CN214282208U/en?oq=CN214282208U (accessed on 28 September 2021).
- Yin, G.; Lin, G.F.; Song, J.J.; Li, J.L.; Zhang, Y.B.; Lu, Z.Y.; Xie, S.Q.; Chen, J.; Sun, L. Dandelion Harvester China: CN207476241U [P]. Available online: https://patents.google.com/patent/CN207476241U/en?oq=CN207476241U (accessed on 12 June 2018).
- Shandong University of Science and Technology. The Utility Model Relates to a Dandelion Seed Harvesting Device China: CN210537495U [P]. Available online: https://patents.google.com/patent/CN210537495U/en?oq=CN210537495U (accessed on 19 May 2018).
- Zhengzhou Zhifeng Electrical Technology Co., Ltd. The Utility Model Relates to a Dandelion Seed Collecting Device China: CN112121922A [P]. Available online: https://patents.google.com/patent/CN112121922A/en?oq=CN112121922A (accessed on 25 December 2020).
- Xu, H.Z.; Hua, Y.; He, J.; Chen, Q.L. The Positive and Negative Synergistic Airflow-Type Jujube Fruit Harvester (P-N JH). Processes 2022, 10, 1486. [Google Scholar] [CrossRef]
- Kang, W.S.; Guyer, D. Development of Chestnut Harvesters for Small Farms. J. Biosyst. Eng. 2008, 33, 384–389. [Google Scholar] [CrossRef]
- Bedane, G.M.; Gupta, M.L.; George, D.L. Development and evaluation of a guayule seed harvester. Ind. Crops Prod. 2008, 28, 177–183. [Google Scholar] [CrossRef]
- Zhao, X.Q.; Wang, W.F. Study on ecological characteristics of wild dandelion seed from beihua university. For. Prospect. Des. 2020, 49, 93–95. [Google Scholar]
- Zhang, F.K. Design and Optimization Test of Air Suction Floor Jujube Picking Machine; Tarim University: Xinjiang, China, 2020. [Google Scholar]
- Hebei University of Technology. An Air Suction Medlar Picking Machine: CN203120470U [P]. Available online: https://patents.google.com/patent/CN203120470U/en?oq=CN203120470U (accessed on 14 August 2013).
- Xiao, H.R.; Ding, W.Q.; Mei, S.; Song, Z.Y.; Zhang, Z.; Qin, G.M.; Zhao, Y.A. A Vibrating Chinese Wolfberry Picking Mechanism. Chinese Patent CN205491807U, 24 August 2016. [Google Scholar]
- Xu, L.M.; Chen, J.W.; Wu, G.; Yuan, Q.C.; Ma, S.; Yu, C.C.; Duan, Z.Z.; Xing, J.J.; Liu, X.D. Design and operating parameter optimization of comb brush vibratory harvesting device for wolfberry. Trans. Chin. Soc. Agric. Eng. 2018, 34, 75–82. [Google Scholar]
- Han, D.D. Design of Harvesting Device of Safflower Petals Based on Pneumatic and Simulation of Airflow Field; Shihezi University: Xinjiang, China, 2014. [Google Scholar]
- Pang, M.J.; Lu, Y.; Bao, J.; Chen, R. The Design Principle of the Gas Trap Hood and Numerical Simulation of Its Flow Fielo. Light Ind. Mach. 2006, 24, 45–47. [Google Scholar]
- Yang, G.; Chen, Q.M.; Xia, X.F.; Chen, J.N.; Song, Z.Y. Design and optimization of key components of 4DL-5A faba bean combine harvester. Trans. Chin. Soc. Agric. Eng. 2021, 3, 10–18. [Google Scholar]
- Wu, J.; Tang, Q.; Mu, S.L.; Jiang, L.; Hu, Z.C. Test and Optimization of Oilseed Rape (Brassica napus L.) Threshing Device Based on DEM. Agriculture 2022, 12, 1580. [Google Scholar] [CrossRef]
- Li, X.P.; Zhang, W.T.; Wang, W.Z.; Huang, Y. Design and Test of Longitudinal Axial Flow Staggered Millet Flexible Threshing Device. Agriculture 2022, 12, 1179. [Google Scholar] [CrossRef]
- Wang, S.S.; Lu, M.Q.; Hu, J.P.; Chen, P.; Ji, J.T.; Wang, F.M. Design and experiment of chinese cabbage seed threshing device combined with elastic short-raspbar tooth. Trans. Chin. Soc. Agric. Mach. 2021, 52, 86–94. [Google Scholar]
- Sudajan, S.; Salokhe, V.M.; Triratanasirichai, K. Effect of type of drum, drum speed and feed rate on sunflower threshing. Biosyst. Eng. 2002, 83, 13–21. [Google Scholar]
- Di, Z.F.; Cui, Z.K.; Zhang, H.; Zhou, J.; Zhang, M.Y.; Piao, L.X. Design and experiment of rasp bar and nail tooth combined axial flow corn threshing cylinder. Trans. Chin. Soc. Agric. Eng. 2018, 34, 28–34. [Google Scholar]
- Koyuncu, T.; Peksen, E.; Sessiz, A.; Pinar, Y. Chickpea threshing efficiency and energy consumption for different beater-contrbeater combinations. Agric. Mech. Asia Afr. Lat. Am. 2007, 38, 53–57. [Google Scholar]
- Meng, F.H.; Jiang, M.; Geng, D.Y.; Lin, J.H.; Xu, H.G. The Design of Longitudinal-axial Cylinder for the Combine. J. Agric. Mech. Res. 2019, 41, 90–94. [Google Scholar]
- Li, H.T.; Wan, X.Y.; Wang, H.; Jiang, Y.J.; Liao, Q.X. Design and Experiment on Integrated Longitudinal Axial Flow Threshing and Separating Device of Rape Combine Harvester. Trans. Chin. Soc. Agric. Mach. 2017, 48, 108–116. [Google Scholar]
- Liao, Q.X.; Xu, Y.; Yuan, J.C.; Wan, X.Y.; Jiang, Y.J. Design and Test of Longitudinal Axial Flexible Hammer-claw Corn Thresher. Trans. Chin. Soc. Agric. Mach. 2019, 50, 140–150. [Google Scholar]
- Sessiz, A.; Koyuncu, T.; Pinar, Y. Soybean threshing efficiency and power consumption for different concave materials. Ama Agric. Mech. Asia Afr. Lat. Am. 2007, 38, 56–59. [Google Scholar]
- Liao, Q.X.; Wan, X.Y.; Li, H.T.; Ji, M.T.; Wang, H. Design and experiment on cyclone separating cleaning system for rape combine harvester. Trans. Chin. Soc. Agric. Eng. 2015, 31, 24–31. [Google Scholar]
- Abbas, A.A.-A. The Effect of Combine Harvester Speed, Threshing Cylinder Speed and Concave Clearance on Threshing Losses of Rice Crop. J. Eng. Appl. Sci. 2019, 14, 9959–9965. [Google Scholar]
- Powar, R.V.; Aware, V.V.; Shahare, P.U. Optimizing operational parameters of finger millet threshing drum using RSM. J. Food Sci. Technol. 2019, 56, 3481–3491. [Google Scholar] [CrossRef]
Figure 1.
The three-dimensional (3D) structure of the harvester. 1. Collection devices; 2. Central control board; 3. Transmission pipeline; 4. Separation devices; 5. Seed storage tank; 6. Rack; 7. Height-regulating device.
Figure 1.
The three-dimensional (3D) structure of the harvester. 1. Collection devices; 2. Central control board; 3. Transmission pipeline; 4. Separation devices; 5. Seed storage tank; 6. Rack; 7. Height-regulating device.

Figure 2.
Harvest operation diagram.

Figure 3.
3D structure of the collection devices. 1. Fan fixing bracket; 2. Disturbing roller; 3. Electrical machine; 4. Collection cover; 5. Height-regulating device; 6. Fan blades.
Figure 3.
3D structure of the collection devices. 1. Fan fixing bracket; 2. Disturbing roller; 3. Electrical machine; 4. Collection cover; 5. Height-regulating device; 6. Fan blades.

Figure 4.
The 3D structure of the disturbing roller. 1. Electrical machine; 2. Spring-teeth; 3. Rotation shaft; 4. Support frame.
Figure 4.
The 3D structure of the disturbing roller. 1. Electrical machine; 2. Spring-teeth; 3. Rotation shaft; 4. Support frame.

Figure 5.
Schematic diagram of perturbation process. (a) After the perturbation process. (b) During disturbing the process. (c) Before the perturbation process. Screen, V and R, represent the forward speed of the harvester (m·s−1) and radius of rotation of the disturbing roller (m).
Figure 5.
Schematic diagram of perturbation process. (a) After the perturbation process. (b) During disturbing the process. (c) Before the perturbation process. Screen, V and R, represent the forward speed of the harvester (m·s−1) and radius of rotation of the disturbing roller (m).

Figure 6.
Negative pressure fan layout diagram. (a) Single row arrangement of small fans. (b) Single row arrangement of large fans. (c) Small fan double row layout.
Figure 6.
Negative pressure fan layout diagram. (a) Single row arrangement of small fans. (b) Single row arrangement of large fans. (c) Small fan double row layout.

Figure 7.
Grid division of collection device model. (a) Grid division of the collection hood for the first type of fan layout, (b) Grid division of the collection hood for the second type of fan layout, (c) Grid division of the collection hood for the third type of fan layout, (d) Cross section schematic diagram of velocity cloud map.
Figure 7.
Grid division of collection device model. (a) Grid division of the collection hood for the first type of fan layout, (b) Grid division of the collection hood for the second type of fan layout, (c) Grid division of the collection hood for the third type of fan layout, (d) Cross section schematic diagram of velocity cloud map.

Figure 8.
Velocity nephogram and velocity vector diagram under different wind speeds.

Figure 9.
Velocity nephogram and velocity vector diagram under different wind speeds.

Figure 10.
Velocity nephogram and velocity vector diagram under different wind speeds.

Figure 11.
The 3D structure of the separation devices. 1. Impurity removal mechanism; 2. Cap; 3. Concave board for separation; 4. Separation drum.
Figure 11.
The 3D structure of the separation devices. 1. Impurity removal mechanism; 2. Cap; 3. Concave board for separation; 4. Separation drum.

Figure 12.
Schematic diagram of separation process of grain and crown hair. (a) Before separation. (b) During separation. (c) After separation.
Figure 12.
Schematic diagram of separation process of grain and crown hair. (a) Before separation. (b) During separation. (c) After separation.

Figure 13.
The 3D structure diagram of separation drum. 1. Impurity removal mechanism; 2. Wire-loops; 3. Hairbrush; 4. Closing drum.
Figure 13.
The 3D structure diagram of separation drum. 1. Impurity removal mechanism; 2. Wire-loops; 3. Hairbrush; 4. Closing drum.

Figure 14.
Separation element combination mode. (a). Only wire-loops distribution. (b). Only brush distribution (c). Cross distribution of bow tooth brushes.
Figure 14.
Separation element combination mode. (a). Only wire-loops distribution. (b). Only brush distribution (c). Cross distribution of bow tooth brushes.

Figure 15.
The 3D structure diagram of separation concave plate. 1. Connecting plate with the upper cap; 2. Perforated screen; 3. Arcuate side-plate; 4. Bolt hole.
Figure 15.
The 3D structure diagram of separation concave plate. 1. Connecting plate with the upper cap; 2. Perforated screen; 3. Arcuate side-plate; 4. Bolt hole.

Figure 16.
Schematic diagram of sieve arrangement.

Figure 17.
Experimental plot area division diagram.

Figure 18.
Photos of dandelion plants and dandelion seed crown balls.

Figure 19.
Harvester performance test. (a) Comparison diagram before and after harvest. (b) Harvester operation diagram. (c) Separated seeds and crown hairs.
Figure 19.
Harvester performance test. (a) Comparison diagram before and after harvest. (b) Harvester operation diagram. (c) Separated seeds and crown hairs.

Figure 20.
Interaction between forward speed and wind velocity of blowers.

Figure 21.
Interaction between wind velocity of blowers and drum rotational speed.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Parameters table of dandelion seed harvester.
| Item | Value |
|---|---|
| Overall dimension (mm) | 2450 × 1200 × 1100 |
| Height of chassis off the ground (mm) | 500 |
| Walking system power (w) | 1500 |
| Forward speed (m·s−1) | 0.8~1.2 |
| Wind velocity of blowers (m·s−1) Drum rotational speed (rpm) | 1.0~2.0 300~500 |
| Cutting width (mm) | 1200 |
Table 2.
Material characteristics of dandelion plants and seeds.
| Item | Value |
|---|---|
| Row spacing (cm) | 15 |
| Plant height (cm) | 35~45 |
| Moisture content of seeds (%) | 9.82 |
| Diameter spherical seed heads (cm) | 4~6 |
| Suspension speed of seeds with pappi (m·s−1) | 0.82 |
| Seed length (cm) | 0.30~0.49 |
Table 3.
Coding of simulation test factors.
| Code | Experimental Factors | ||
|---|---|---|---|
| Forward Speed (m·s−1) | Wind Velocity of Blowers (m·s−1) | Drum Rotational Speed (rpm) | |
| −1 | 0.8 | 1.0 | 300 |
| 0 | 1.0 | 1.5 | 400 |
| 1 | 1.2 | 2.0 | 500 |
Table 4.
Experiment scheme and results.
| No. | Experimental Factors | Experimental Index | ||
|---|---|---|---|---|
| Forward Speed | Wind Velocity of Blowers | Drum Rotational Speed | Harvest Rate | |
| 1 | −1 | −1 | 0 | 85.8% |
| 2 | 1 | −1 | 0 | 79.4% |
| 3 | −1 | 1 | 0 | 88.0% |
| 4 | 1 | 1 | 0 | 86.9% |
| 5 | −1 | 0 | −1 | 79.1% |
| 6 | 1 | 0 | −1 | 75.4% |
| 7 | −1 | 0 | 1 | 83.3% |
| 8 | 1 | 0 | 1 | 78.2% |
| 9 | 0 | −1 | −1 | 73.5% |
| 10 | 0 | 1 | −1 | 74.1% |
| 11 | 0 | −1 | 1 | 76.1% |
| 12 | 0 | 1 | 1 | 83.1% |
| 13 | 0 | 0 | 0 | 87.5% |
| 14 | 0 | 0 | 0 | 87.0% |
| 15 | 0 | 0 | 0 | 87.3% |
| 16 | 0 | 0 | 0 | 87.1% |
| 17 | 0 | 0 | 0 | 86.9% |
Table 5.
Analysis of variance of regression equations.
| Source of Variance | Sum of Square | Degree of Freedom | Mean Square | F | p |
|---|---|---|---|---|---|
| Model | 448.41 | 9 | 49.82 | 95.83 | <0.0001 |
| A-A | 33.21 | 1 | 33.21 | 63.88 | <0.0001 |
| B-B | 37.41 | 1 | 37.41 | 71.95 | <0.0001 |
| C-C | 43.25 | 1 | 43.25 | 83.17 | <0.0001 |
| AB | 7.02 | 1 | 7.02 | 13.51 | 0.0079 |
| AC | 0.49 | 1 | 0.49 | 0.94 | 0.3640 |
| BC | 10.24 | 1 | 10.24 | 19.7 | 0.0030 |
| A^2 | 0.029 | 1 | 0.029 | 0.055 | 0.8211 |
| B^2 | 20.7 | 1 | 20.7 | 39.82 | 0.0004 |
| C^2 | 286.06 | 1 | 286.06 | 550.19 | <0.0001 |
| Residual | 3.64 | 7 | 0.52 | ||
| Lack of Fit | 3.41 | 3 | 1.14 | 19.58 | 0.0075 |
| Pure Error | 0.23 | 4 | 0.058 | ||
| Cor Total | 452.05 | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Qu, Z.; Lu, Q.; Shao, H.; Liu, L.; Wang, X.; Lv, Z. Design and Testing of a Self-Propelled Dandelion Seed Harvester. Agriculture 2023, 13, 917. https://doi.org/10.3390/agriculture13040917
AMA Style
Qu Z, Lu Q, Shao H, Liu L, Wang X, Lv Z. Design and Testing of a Self-Propelled Dandelion Seed Harvester. Agriculture. 2023; 13(4):917. https://doi.org/10.3390/agriculture13040917
Chicago/Turabian StyleQu, Zhe, Qi Lu, Haihao Shao, Long Liu, Xiuping Wang, and Zhijun Lv. 2023. "Design and Testing of a Self-Propelled Dandelion Seed Harvester" Agriculture 13, no. 4: 917. https://doi.org/10.3390/agriculture13040917
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.