
Experimental Research for Digging and Inverting of Upright Peanuts by Digger-Inverter
by
 ,
,
Haiyang Shen
1,2,
Hongguang Yang
1 ,
,
Qimin Gao
1,2,
Fengwei Gu
1,
Zhichao Hu
1,2,*,
Feng Wu
1,
Youqing Chen
1 and
Mingzhu Cao
1 1
Nanjing Institute of Agricultural Mechanization, Ministry of Agriculture and Rural Affairs, Nanjing 210014, China
2
Graduate School of Chinese Academy of Agricultural Sciences, Beijing 100081, China
*
Author to whom correspondence should be addressed.
Agriculture 2023, 13(4), 847; https://doi.org/10.3390/agriculture13040847
Submission received: 16 March 2023
/
Revised: 31 March 2023
/
Accepted: 6 April 2023
/
Published: 10 April 2023
(This article belongs to the Special Issue 'Eyes', 'Brain', 'Feet' and 'Hands' of Efficient Harvesting Machinery)
Abstract
:In order to quickly dry the peanut pods and effectively reduce the mildew on peanut pods in rainy weather, this paper analyzed the research status of peanut digging and inverting technology in China and abroad, combined with the peanut two-stage harvesting mode. The orthogonal experiment was carried out by using the peanut digger-inverter to study the different forms of upright type, taking the rate of vines inverting, the rate of buried pods, and the rate of fallen pods as the evaluation indexes, and taking the traveling speed of the tractor A, the line speed of the conveyor chain B, and the line speed of the inverting roller C as the experimental factors. The results showed that, in the states of unpressed vines and pressed vines, the order of influence of the peanut digger-inverter on the evaluation indices was A > C > B. The optimal horizontal combination of unpressed vines was A2C3B2, when the traveling speed of the tractor is 1.06 m/s, the line speed of the inverting roller is 2.12 m/s, and the line speed of the conveyor chain is 1.02 m/s; the rate of vines inverting was 71.07%, the rate of buried pods was 0.2%, and the rate of fallen pods was 0.22%. Under the condition of vines pressing, the best horizontal combination is A2C2B2, when the travelling speed of the tractor is 1.01 m/s, the line speed of the inverting roller is 1.88 m/s, and the line speed of the conveyor chain is 1.02 m/s; the rate of vines inverting was 74.29%, the rate of buried pods was 0.14%, and the rate of fallen pods was 0.33%. The paired t-test was carried out by the peanut digger-inverter under the state of pressed and unpressed vines. There was little difference in the influence of each factor on the rate of fallen pods and the rate of buried pods, but there was a significant difference in the influence on the rate of vines inverting. The rate of inversion of vines under the state of pressed vines was higher than that under the state of unpressed vines. The research results will provide certain technical support for the late optimization of the peanut digger-inverter and create a hardware foundation for the intelligence and information harvesting of peanuts.
1. Introduction
Peanut (Arachis hypogea L.) is an annual leguminous herb in the rose order, also known as “everlasting pod”, “mud-bean”, “crocus bean”, and so on [1]. Peanut is the fourth largest oil crop in the world [2,3,4], and it is also one of the most vital oil crops and economic crops that play a crucial role in ensuring domestic edible oil supply and diversifying food consumption in China [5,6,7]. According to the statistics of the Food and Agriculture Organization (FAO) of the United Nations and the National Bureau of Statistics of China, in 2020, the planting area for peanuts in the world was 3.16 × 107 ha with a total yield of 5.36 × 107 t, and the planting area for peanuts in China was 4.62 × 106 ha with a total yield of 1.81 × 107 t. The area and total yield were ranked second and first in the world, accounting for 14.63% and 33.64% of the global peanut area and yield, respectively [8,9].
The research and development of Chinese peanut production machinery began in the 1960s. After half a century of effort, all the links in peanut mechanization production have made great progress [10,11,12,13]. In 2016, the mechanization rates of the three main links of peanut cultivation, sowing, and harvesting were 72.61%, 43.1%, and 33.91%, respectively, and the comprehensive mechanization rate was 52.14% [14]. At present, there are two main operating modes in China’s peanut harvesting machinery, which are two-stage harvest and combine harvest [15]. When the two-stage harvester operates, the digging harvester places peanut plant pods in the field facing up, which is conducive to the rapid drying of pods, and it can effectively reduce the occurrence of peanut pod mold in rainy weather [16,17]. Therefore, whether it is abroad or in China, there is a demand for peanut digging harvesting techniques with vines inverting functions. At present, most of the peanut-digging harvesting machines in countries such as the United States have the function of inverting the vines [18]. In China, the two-stage rewarding areas are mainly produced in Huanghuaihai Northeast and Northwest, while the peanuts of Huanghuaihai Marine District are also harvested. It is often harvested in the same season, and the technical demand for digging and harvesting with the function of the vines inverting is the most urgent.
The peanut digger-inverter mainly has an inverting wheel and a curve-type inverting rod mechanism, which can realize the peanut plant pod facing up and orderly inverting laying. In the United States, there are five major agricultural machinery manufacturing companies, including Armadas Industries (AMADAS), Suffolk, VA, USA; Kelley Manufacturing Company (KMC), Tifton, GA, USA; Colombo North America Inc. (COLOMBO), Adel, GA, USA; Ferguson Manufacturing Company (FERGUSON), Suffolk, VA, USA; and Pearman Corporation (PEARMAN), Tifton, GA, USA. They have produced peanut harvesters with a peanut vine inverting function, and their vines inverting mechanisms are similar in structure and have been widely used in the world, but it does not apply to Chinese upright peanuts [19,20,21,22,23]. For example, in 2011, the relevant machine from KMC Company in the United States was introduced into Xinjiang. The peanut varieties planted in Xinjiang are upright and mulched, resulting in poor vine inversion, serious mulching film entanglement, high pod fall and loss rates, and other problems [24]. In combination with the common planting of upright peanut varieties in the main producing areas of China, they generally have the characteristics of an upright and compact plant type, few branches, and a higher main stem. Zhengzhou Xechuang Mechanical and Electrical Equipment Co., Ltd., Zhengzhou, China, independently developed Hongtian 4HS-2 peanut harvester; Heishan County Jianguo Agricultural Machinery Machinery Co., Ltd., Suzhou, China, independently developed Jianguo brand 2H-1 peanut harvester; Shandong Jiarun Heavy Industry Machinery Co., Ltd., Linyi, China, independently developed supply chain peanut harvester, Ministry of Agriculture and Rural Affairs of Nanjing Institute of Agricultural Mechanization independently developed elevator chain peanut harvester; peanut digging and harvesting machines with neat laying functions have been widely used in Shandong, the Northeast, and other major peanut producing areas [25,26,27]. These machines can only achieve the orderly laying of peanuts and cannot prevent the vines from inverting. On the basis of referring to the harvesting technology of the United States, China has also developed some similar peanut digging and harvesting machines with the function of inverting vines. For example, Mechanical Equipment Research Institute of Xinjiang Academy of Agricultural Reclamation Sciences [28], Zhengyang Chuangxin Machinery Co., Ltd., Zhumadian, China [29], Henan Shifeng Machinery Manufacturing Co., Ltd., Luoyang, China [30], Xinjiang Agricultural University [31], Shenyang Agricultural University [32], Henan Polytechnic University [16], etc., these research results are only reflected in literature and have not been applied in real production practice. Therefore, the optimization of the working parameters of the peanut digger-inverter is helpful to promote the rapid industrialization of the machine.
In view of the current research status of peanut digging and inverting technology in China and abroad, in order to quickly dry the pods and effectively reduce the peanut pod sticking mildew in rainy weather, this paper, combined with the peanut two-stage harvesting mode, used the peanut digger-inverter to conduct experimental research on upright type peanuts under two conditions of unpressed vines and pressed vines, and found the parameters of the peanut digger-inverter suitable for Chinese peanut varieties. It will provide certain technical support for the later design of the peanut digger-inverter and create the hardware foundation for peanut intelligence and information harvesting.
2. Materials and Methods
2.1. Agronomic Process Based on Peanut Two-Stage Harvesting Operation Mode
Two-stage harvesting is the operation process of using more than two machines to complete the digging of peanuts, the separation of pod soil, laying and drying, picking up pods, and other working conditions. There are mainly three operation modes: first, after the peanuts are dug and laid by the digging and harvesting machine, they are artificially dried in the field, and finally they are collected and harvested together, namely “Digging–Separation of soil from peanut pods–Laying–Field drying–Tiling–Pickup combined harvesting.” Second, after the digging and laying of peanuts by the digging and harvesting machine, the peanuts are picked up manually and taken to the drying field and other places for centralized drying. Finally, the dried pods are picked by the pod picking machine, namely: “Digging–Separation of soil from peanut pods–Laying–Manual pickup–Dry in the sun or pile up-Pick the dried pod.” Three is the peanut after digging and harvesting by machine in a digging shop, artificial pick-up after the use of machinery, or artificial fresh pod picking, which is “Digging–Separation of soil from peanut pods–Laying–Manual pickup–Pick pod from fresh plants” [33,34]. The agronomic process of a specific peanut under the two-stage operation mode is shown in Figure 1.
2.2. Design of Overall Structure and Principle
2.2.1. Overall Structure
Nanjing Institute of Agricultural Mechanization, Ministry of Agriculture and Rural Affairs, and Henan Nongyouwang Agricultural Equipment Technology Co., Ltd., Zhumadian, China. have jointly developed a kind of peanut digger-inverter, which is mainly composed of a depth limiting roller, V-shaped digging shovel, vines guide rod, frame, loop conveyor chain, harrow teeth, inverting roller, inverting rod, transmission assembly, folding plate, and rear wheel, etc., with its basic structure shown in Figure 2. The peanut digger-inverter developed can complete the digging and harvesting, soil separation, vine transportation, vine inverting, and laying of peanuts in one go. During the operation of the peanut digger-inverter, driven by the tractor, the digging shovel first breaks ridges and digs, and the soil is separated through the loop conveyor chain, and finally the inverting roller and inverting rod are spread in the field. The main structural parameters and technical parameters of the machine are shown in Table 1.
2.2.2. Working Principle
The working principle of the peanut digger-inverter is as follows: With the advance of the machine, the peanut vine moves backward along the vine’s guide rod and is supported by the toothed conveying rod. The peanut vines keep the top up and the root down on the vine’s guide rod and conveying rod, and the peanut vines continue to be transported backward to the vine inverting roller. Under the rotating action of the vine inverting roller, it is handed over to the vine inverting rod. Under the combined action of inverting rod and inverting plate, the left and right rows of peanuts within the width of a pair of digging and shoveling operations support and cooperate with each other, reaching the state of rooting up.
2.3. Experimental Instruments and Conditions
2.3.1. Experimental Instruments
During the experiment, the instruments needed mainly include: a tractor (Kubota, M954-k), a peanut digger-inverter (as shown in Figure 3), an XJP-02A speed digital display instrument (measuring range 1~9999 r/min, accuracy ±0.02%), a toolbox (including all tools for disassembling parts of the peanut vine inverting and harvesting machine), a tape measure (100 m), an ICS465 electronic platform scale (measuring range: 50 kg, accuracy: 0.02 kg), a marker, label paper, a woven bag, a spade, a multifunctional electronic stopwatch, etc.
2.3.2. Experimental Conditions
From 31 July 2022 to 2 August 2022, the peanut digger-inverter experiment was conducted in Baishi Village, Tangjiang Town, Nankang District, and Ganzhou City, Jiangxi Province. In the peanut production experimental base of the Ganzhou Academy of Agricultural Sciences, Jiangxi Province, the experiment of the peanut digger-inverter was carried out. The experimental land size reached 0.5 ha, the terrain was flat, the soil was sticky, and the peanut variety was “Osmanthus 73”. This kind of peanut is an upright type. The planting mode was single ridge and double row, and the ridge spacing was 90 cm. During the experiment, the peanut was fully mature, and the average plant height was 54 cm, which met the basic requirements for peanut harvest.
2.4. Experimental Factors, Indicators, and Methods
2.4.1. Experimental Factors
In the field experiment, there are many factors affecting the peanut digger-inverter, among which the traveling speed of the tractor is the most important factor. The traveling speed of the tractor will not only affect the working efficiency of the whole machine but also affect the working effect of the peanuts because the tractor is the most uncontrollable factor in the whole experiment process, which is also the biggest change. At the same time, driving the tractor too fast will lead to poor peanut planting and vine inversion. According to a literature review and calculation, the traveling speed range of tractors is 0.7~1.3 m/s [16,31,32]. The rotation speed of the loop conveyor chain is also a major factor; too fast rotation will lead to peanut straw dispersion, and too slow rotation will lead to peanut straw congestion, so take the line speed of the conveyor chain as an experimental factor. The known rotation radius is 0.08 m, the maximum rotation speed is determined to be 135 r/min, and the minimum rotation speed is 100 r/min. Through a literature review and calculation, it can be known that the line speed of the conveyor chain range is 0.84~1.13 m/s [16,31,32]. In order to ensure the effect of peanut vines inverting, it is required that the absolute velocity of peanut vines landing be zero, so the rotation speed of the peanut inverting roll is a major experimental factor. Given that the radius of the inverting roll is 0.3 m, the maximum rotation speed is determined to be 70 r/min, and the minimum rotation speed is 50 r/min. Through literature review and calculation, it is known that the line speed of the inverting roller range is 1.57~2.12 m/s [16,31,32]. Therefore, the traveling speed of the tractor, the line speed of the conveyor chain, and the line speed of the inverting roller are determined as the main factors affecting the operation index.
The experimental scheme used in this paper is an orthogonal experiment with three factors and three levels. For the three test factors, the traveling speed of the tractor is A, the line speed of the conveyor chain is B, and the line speed of the inverting roller is C. The experimental research is carried out in the two states of pressed and unpressed vines. Experimental factors and levels are shown in Table 2. Orthogonal table L9 (34) is established [35].
2.4.2. Experimental Indexes
According to DB34/T534-2022 Anhui Provincial Standard “Technical Specification for Mechanized Peanut Harvesting” [36] and DG/T077-2019 agricultural machinery extension identification outline “Peanut Harvesting” [37], the travelling speed of the tractor and the rate of buried pods, the rate of fallen pods, and the rate of vines inverting of peanuts were measured in the field experiment of the peanut digger-inverter machine.
(1) Measurement of traveling speed of tractor
The length of the measuring area is 30 m, the rated speed of the tractor engine can be ensured (and the speed of the rear power output shaft can be ensured), the suitable working gear is selected for full operation, a stroke is measured, and the time through the measuring area is recorded. The operating speed is calculated according to Formula (1):
where:
V = L/T
- V—The traveling speed of the tractor, expressed in meters per second (m/s);
- L—The length of the entire test area, expressed in meters (m);
- T—Time to pass through the test area, expressed in seconds (s).
(2) Determination of the rate of buried pods, the rate of fallen pods, and the rate of vines inverting in the peanut digger-inverter
In the measuring area, three equal distances were taken, each of which was 3 m long and had one working width. All the pods falling on the ground and buried in the soil layer (after the removal of naturally falling pods) were collected in each plot and called quality. The rates of buried pods, fallen pods, and vines inverting were calculated according to Formulas (2)–(4), and the average value of the three plots was taken as the evaluation index.
where:
Pm = Mm/Mx ×100%
Ps = Ms/Mx × 100%
Pf = l/L × 100%
- Pm—The rate of buried pods, the weight of the pod buried in the soil layer in the plot divided by the total weight of the pod in the whole plot (%);
- Mm—The pod mass (excluding naturally fallen pods) buried in the soil layer in the plot, expressed in grams (g);
- Mx—The total pod weight of crops in the plot, expressed in grams (g);
- Ps—The rate of fallen pods, the mass of pods dropped in the cell divided by the total mass of pods in the whole cell (%);
- Ms—Mass of pods dropped in the plot, expressed in grams (g);
- Pf—The rate of vines inverting; the number of peanut vines with no pod in the community divided by the total number of peanut vines in the community (%);
- l—The number of peanut vines without pods on the ground after peanut harvest in the community; unit is the number of vines;
- L—Total number of peanut vines in the community; unit is the number of vines.
2.4.3. Experimental Methods
The self-developed peanut digger-inverter was driven by the tractor to carry out field experiments according to the working width of the machine; each experiment is 2 ridges and 4 rows. The theoretical traveling speed of the tractor was controlled by the gear position, and the actual operating speed was calculated at the end of each measuring area. The line speed of the conveyor chain and the line speed of the inverting roller are controlled by the rotating speed of the conveying shaft, and the orthogonal experiment between unpressed vines and pressed vines was carried out on the designed orthogonal experiment scheme. The range, variance, and comprehensive analysis methods were used to analyze the orthogonal experimental results, and the optimal working parameter combination was obtained [35,38,39,40]. The paired t-test method was used to test the correlation between the two states of pressed vines and unpressed vines, and the best working effect was obtained under the state of pressed vines and unpressed vines [35,38]. The field experiment process and effect are shown in Figure 4.
There are two states in the experimental object of the peanut digger-inverter, namely unpressed vines and pressed vines. The unpressed vines refer to the upright peanut growing naturally, while the pressed vines refer to the two ridges of peanut vines falling to the middle of the ridges by artificial or mechanical means to reach the morphology of a trailing peanut. Through the comparison of these two ways of experimenting, it can be seen that the operation effect of the peanut digger-inverter harvester is better under the condition of pressed vines than unpressed vines.
3. Results
3.1. Results of Unpressed Vines Experiment
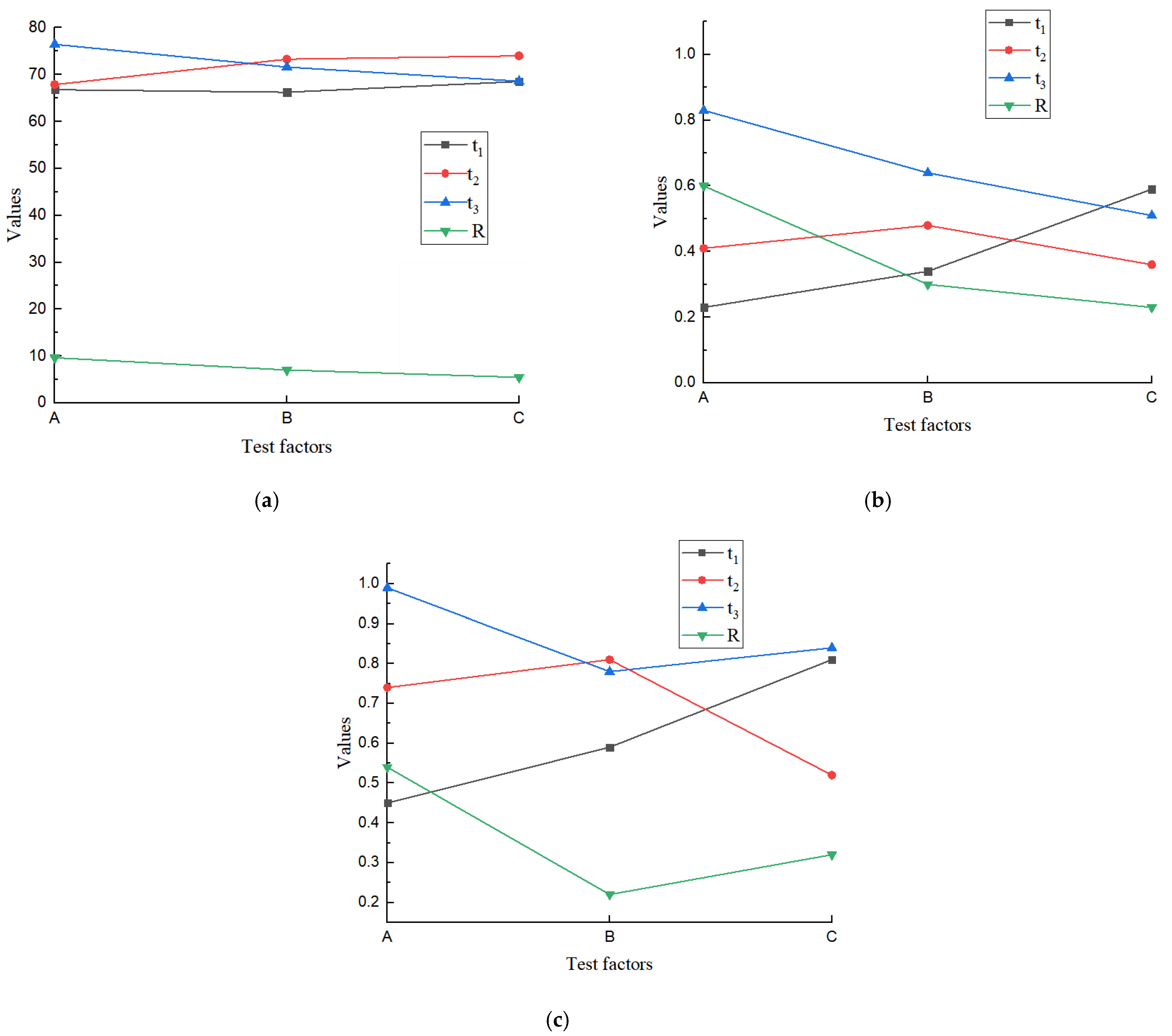
According to the experimental method, the experimental results of the peanut digger-inverter under the condition of unpressed vines are shown in Table 3, and the range analysis and variance analysis are shown in Figure 5 and Table 4.
The variable R stands for range, and the range of a factor is the difference between the maximum and minimum values of the mean values of each level of the factor, t1 represents the average value of experimental results at the level of 1 for each experimental factor, t2 represents the average value of experimental results at the level of 2 for each experimental factor, and t3 represents the average value of experimental results at the level of 3 for each experimental factor.
According to the range analysis in Figure 5a, the order of influence of all factors on the rate of vines inverting is as follows: A > B > C. According to the comprehensive comparability, the higher the average value of each factor group of the rate of vines inverting, the better the level of factor. Moreover, according to the variance results in Table 4, the impact of all factors on the rate of vines inverting is extremely significant, so the maximum horizontal combination is A3B2C2. Similarly, according to the range analysis in Figure 5b, the order of influence of all factors on the rate of buried pods is as follows: A > B > C. From comprehensive comparability, it can be seen that the lower the average value of each factor group in the rate of buried pods, the better the level of the factor. Moreover, according to variance results in Table 4, it can be seen that the traveling speed of the tractor has a significant impact on the rate of buried pods, while the line speed of the conveyor chain and the line speed of the inverting roller have no significant impact on the rate of buried pods. At the same time, A1 and A2 are the same, so the minimum horizontal combination is chosen as A2B1C3 by mechanical performance. Similarly, from the range analysis in Figure 5c, it can be seen that the order of influence of all factors on the rate of fallen pods is as follows: A > C > B. From the comprehensive comparability, it can be seen that the lower the average value of each factor group for the rate of fallen pods, the better the level of that factor. Moreover, from the variance results in Table 4, it can be seen that the influence of the traveling speed of the tractor and the line speed of the inverting roller on the rate of fallen pods is extremely significant, and the line speed of the conveyor chain has a significant effect on the rate of fallen pods, so the minimum horizontal combination is A1C1B2.
According to the comprehensive balance method for multi-index data analysis of an orthogonal experiment, the above analysis results are summarized, and the summary table is shown in Table 5.
As can be seen from Table 5, factor A is the most important at the level of A2, followed by factor C at the level of C3, and then factor B at the level of B2. In conclusion, the best horizontal combination can be A2C3B2, that is, the traveling speed of the tractor is 0.9~1.1 m/s, the line speed of the inverting roller is 2.12 m/s, and the line speed of the conveying chain is 1.02 m/s. In order to further verify the operation effect, three repeated experiments were carried out under the above optimal working parameters: the average traveling speed of the tractor was 1.06 m/s, the rate of vines inverting was 71.07%, the rate of buried pods was 0.2%, and the rate of fallen pods was 0.22%. The rate of buried pods and the rate of fallen pods were far less than the identification standard of the peanut harvester.
3.2. Results of Pressed Vines Experiment
According to the experimental method, the experimental results of the peanut digger-inverter under the condition of pressed vines are shown in Table 6, and the range analysis and variance analysis are shown in Figure 6 and Table 7.
The variable R stands for range, and the range of a factor is the difference between the maximum and minimum values of the mean values of each level of the factor, t1 represents the average value of experimental results at the level of 1 for each experimental factor, t2 represents the average value of experimental results at the level of 2 for each experimental factor, and t3 represents the average value of experimental results at the level of 3 for each experimental factor.
According to the range analysis in Figure 6a, it can be seen that the order of influence of all factors on the rate of vines inverting is as follows: A > B > C. From comprehensive comparability, it can be seen that the higher the average value of each factor group, the better the level of that factor. Moreover, according to the variance results in Table 7, it can be seen that each factor has an extremely significant impact on the rate of vines inverting, so the maximum horizontal combination is A3B2C2. Similarly, according to the range analysis in Figure 6b, it can be seen that the order of influence of all factors on the rate of buried pods is as follows: A > B > C. From the comprehensive comparability, it can be seen that the lower the average value of each factor group for the rate of buried pods, the better the factor level. Moreover, from the variance results in Table 7, it can be seen that the traveling speed of the tractor has a significant impact on the rate of buried pods. The line speed of the conveyor chain and the line speed of the inverting roller had no significant effect on the rate of buried pods, so the minimum horizontal combination was chosen as A1B1C2. Similarly, according to the range analysis in Figure 6c, it can be seen that the order of influence of all factors on the rate of fallen pods is as follows: A > C > B. Based on comprehensive comparability, it can be seen that the smaller the average value of each factor group, the better the level of that factor. Moreover, according to variance results in Table 7, it can be seen that the influence of the traveling speed of the tractor on the rate of fallen pods is extremely significant, the influence of the line speed of the inverting roller on the rate of fallen pods is significant, and the influence of the line speed of the conveyor chain on the rate of fallen pods is insignificant, so the minimum horizontal combination is A1C2B1.
According to the comprehensive balance method of multi-index data analysis in an orthogonal experiment, the above analysis results are summarized, and the summary table is shown in Table 8.
As can be seen from Table 8, factor A is the most important at the level of A2, followed by factor C at the level of C2, and then factor B at the level of B2. In summary, the best horizontal combination can be A2C2B2, that is, the traveling speed of the tractor is 0.9~1.1 m/s, the line speed of the inverting roller is 1.88 m/s, and the line speed of the conveyor chain is 1.02 m/s. In order to further verify the operation effect, three repeated experiments were carried out under the above optimal working parameters: the average traveling speed of the tractor was 1.01 m/s, the rate of vines inverting was 74.29%, the rate of buried pods was 0.14%, and the rate of fallen pods was 0.33%. The rate of buried pods and the rate of fallen pods were far less than the identification standard of the peanut harvester.
3.3. Results of Pairing Analysis between Unpressed Vines and Pressed Vines
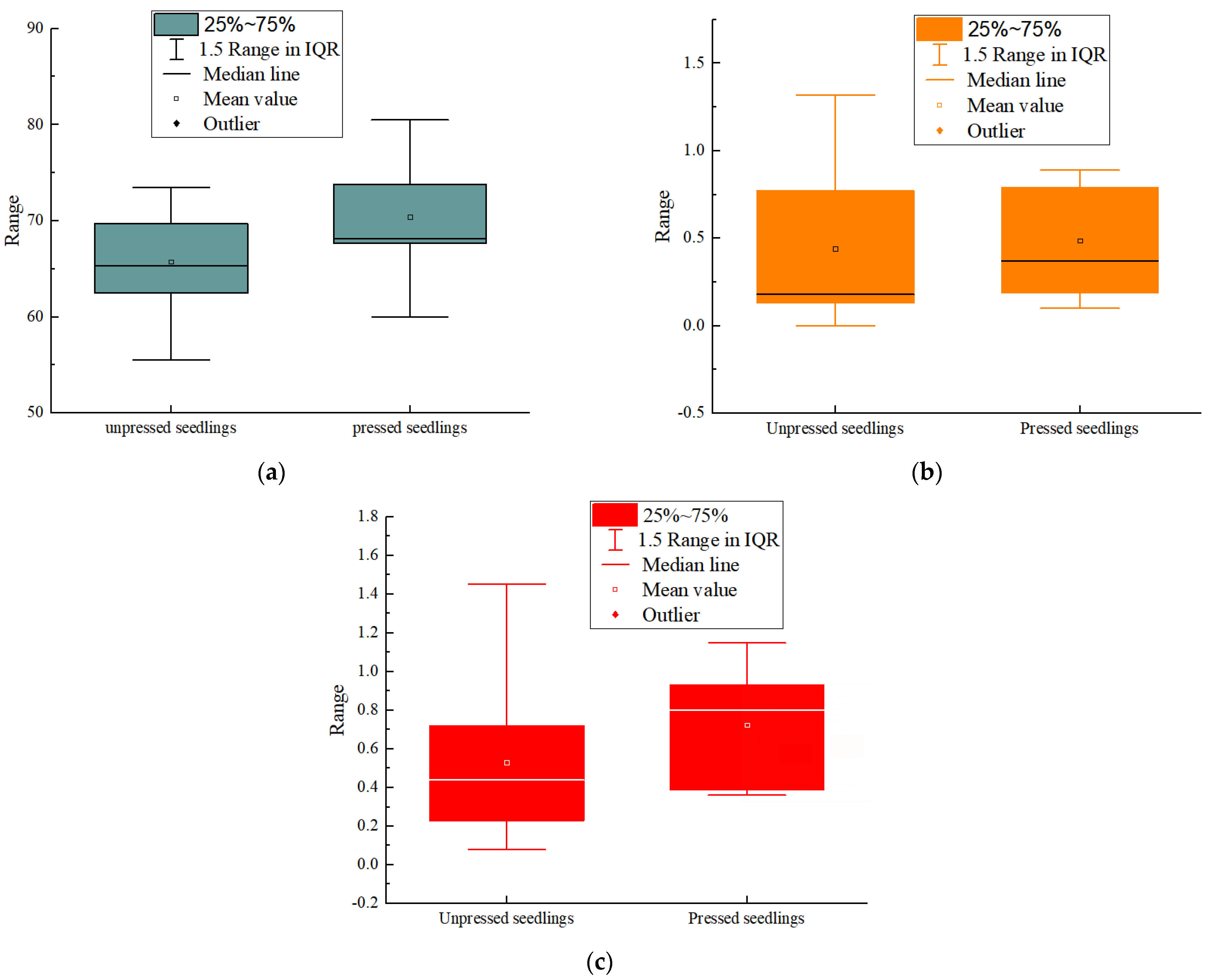
The paired t-test was conducted for the rate of vines inverting, the rate of buried pods and the rate of fallen pods, of unpressed and pressed vines, and the significance level was 0.05. The correlation of paired samples was shown in Table 9, the test results of paired samples were shown in Table 10, and the box diagram of paired sample comparison was shown in Figure 7.
As can be seen from Table 9, the correlation between unpressed vines and pressed vines to the rate of vines inverting was 0.913, which was significant (p = 0.001 < 0.01), the correlation between unpressed vines and pressed vines was 0.787, and the correlation was significant (p = 0.012 < 0.05), and the correlation between unpressed vines and pressed vines was 0.281, and the correlation was insignificant (p = 0.464 > 0.05). As can be seen from Table 10, at the significance level of 0.05, the paired t-test was conducted for the rate of vines inverting on unpressed vines and pressed vines, and the T-value was −5.479, and the significance p value was 0.001 < 0.01. It can be seen that unpressed vines and pressed vines not only have a significant correlation but also a significant difference in the rate of vines inverting. According to the comparison in Figure 7a, the mean and median values of the rate of vines inverting on pressed vines are higher than those on unpressed vines. At the significance level of 0.05, the paired t-test was conducted for the rate of buried pods of unpressed vines and pressed vines and the rate of fallen pods of unpressed vines and pressed vines. The p values of the rates of buried pods of unpressed vines and pressed vines and the rates of fallen pods of unpressed vines and pressed vines were all greater than 0.05. Therefore, there was no significant difference between the rate of buried pods of unpressed vines and pressed vines and the rate of fallen pods of unpressed vines and pressed vines. According to the comparison in Figure 7b,c, there was little difference between the average rate of buried pods and the average percentage of falling pods between the unpressed and pressed vines.
As summarized, under the condition of pressed and unpressed vines, the influence of various factors on the rate of fallen pods and the rate of buried pods is small, but there is a difference in the rate at which vines invert. The rate of vines inverting peanut under the state of pressed vines is higher than that under the state of unpressed vines.
4. Discussion
In the process of peanut digger-inverter operation, under the state of unpressed vines and pressed vines, the influencing sequence of each factor on each index is the same, that is, the traveling speed of the tractor has the greatest influence on the rate of vines inverting, the rate of buried pods, and the rate of fallen pods of the peanut digger-inverter. This is because when the tractor’s travel speed is high, there will be many peanut vines and pods on the peanut digger-inverter machine. First, it will cause blockage and serious vine accumulation, which is not conducive to the later vines flipping. Second, the peanut digging shovel will not maintain the digging depth at the beginning of the operation, which will break the peanut pod, resulting in buried pods and falling pods. Third, the pod’s falling speed will also accelerate, which will cause the rigid acceleration of the peanut pod landing at that moment, resulting in a peanut falling pod. When the speed of the tractor is slow, the number of peanut vines will be small, and the peanut vines cannot stand on their hands independently, resulting in a very low rate of peanut vines inverting [16,41,42]. The line speed of the conveyor chain only has an effect on the rate of vines inverting; it has no effect on the rate of buried pods or the rate of fallen pods. This is because the line speed of the conveyor chain can only affect the number of peanut vines on the back of the inverting roller and has no effect on the peanut pod. However, the speed of the tractor, the line speed of the inverting roller is the most influential factor on the rate of vines inverting and the rate of fallen peanut pods, and it has no influence on the rate of buried pods. This is because the inverting roller is too large, which will lead to the peanut vines being thrown out, resulting in their inability to stand on their hands and the pod falling off. The inverting roller is too small, which will lead to the peanut vines not being able to turn over to the ground in time, resulting in congestion and the peanut vines not being able to turn over [28,43].
Under different states of unpressed vines and pressed vines, there are significant differences in the paired t-test of the rate of vines inverting for each factor of the peanut digger-inverter. This is because the lodging peanut vines are dependent, while the independent peanut vines have an extremely poor inverting effect, and the trailing and semi-trailing peanut varieties have a better inverting effect. Therefore, peanut planting row spacing should be matched with the harvester. The left and right rows of peanut vines support each other [32,44].
The relevant experimental results showed that the peanut vine inverting effect was better under the pressed vine state, and under the same conditions, the rate of vine inverting was 4.3% higher than that of unpressed vines and 3.1% higher than that of the turnover laying device of the peanut harvester. In addition, the peanut digger-inverter has a much smaller rate of fallen pods than the turnover-laying device of the peanut harvester. The data pairs for each experiment are shown in Table 11.
5. Conclusions
In order to quickly dry peanut pods and effectively reduce the mildew of peanut pods sticking to the ground in rainy weather, this paper analyzed the current research status of peanut digging and inverting technology in China and abroad. Combined with the two-stage harvesting mode of peanut, the orthogonal experiment was carried out with the peanut digger-inverter on the upright peanut under two states of pressed and unpressed vines. The results showed that:
(1) Through the analysis of range, variance, and the comprehensive balance method of an orthogonal experiment, it can be seen that the influence sequence of each factor of the peanut digger-inverter on the evaluation index under the condition of unpressed vines is as follows: A > C > B, the best horizontal combination is A2C3B2, that is, the speed of the tractor is 0.9~1.1 m/s, the line speed of the conveying chain is 1.02 m/s, and the line speed of the inverting roller is 2.12 m/s. Under the horizontal combination, the experimental results were as follows: the average travelling speed of the tractor was 1.06 m/s, the rate of vines inverting was 71.07%, the rate of buried pods was 0.2%, and the rate of fallen pods was 0.22%.
(2) Through the analysis of range, variance, and the comprehensive balance method of an orthogonal experiment, it can be seen that the influence sequence of each factor of the peanut digger-inverter on the evaluation index under the condition of pressed vines is as follows: A > C > B, the best horizontal combination is A2C2B2, that is, the traveling speed of the tractor is 0.9~1.1 m/s, the speed of the conveying chain is 1.02 m/s, and the line speed of the inverting roller is 1.88 m/s. Under this horizontal combination, the experimental results were as follows: the average travelling speed of the tractor was 1.01 m/s, the rate of vines inverting was 74.29%, the rate of buried pods was 0.14%, and the rate of fallen pods was 0.33%.
(3) Through the paired t-test, it can be seen that under the state of pressed vines and unpressed vines, there is little difference in the influence of various factors on the rate of fallen pods and the rate of buried pods, but there is a difference in the influence on the rate of vines inverting. The rate of peanut vines inverting under the state of pressed vines is higher than that under the state of unpressed vines.
On the basis of the optimization of the working parameters of the peanut digger-inverter, in the future, we will develop a set of the peanut digger-inverter suitable for upright peanuts and carry out intelligence and information research on the existing basis.
Author Contributions
Conceptualization, H.S., F.G. and Z.H.; methodology, H.S. and H.Y.; software, H.S. and H.Y.; validation, H.S., H.Y. and F.W.; formal analysis, H.S. and Q.G.; investigation, Q.G.; resources, F.W.; data curation, H.S., F.W. and Y.C.; writing—original draft preparation, H.S.; writing—review and editing, M.C., Q.G. and Z.H.; visualization, Y.C.; supervision, Z.H.; project administration, M.C.; funding acquisition, F.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Peanut Industry Technology System, grant number CARS-13.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on demand from the first author at ([email protected]).
Acknowledgments
Thanks to Ganzhou Experimental Station of the National Peanut Industry System for providing the experimental site.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen, Y.C. Falling peanut in Ming Dynasty, shaped like taro but not peanut in early Qing Dynasty, the first real peanut in Chongming. Local Chron. Jiangsu 2018, 174, 85–88. [Google Scholar]
- Zhang, J.L.; Geng, Y.; Guo, F.; Li, X.G.; Wan, S.B. Research progress on the mechanism of improving peanut yield by single-seed precision sowing. J. Integr. Agric. 2020, 19, 1919–1927. [Google Scholar] [CrossRef]
- Shi, L.; Wang, B.; Hu, Z.; Yang, H. Mechanism and Experiment of Full-Feeding Tangential-Flow Picking for Peanut Harvesting. Agriculture 2022, 12, 1448. [Google Scholar] [CrossRef]
- Chen, Z.K.; Wu, H.C.; Zhang, Y.H.; Peng, B.L.; Gu, F.W.; Hu, Z.C. Development of automatic depth control device for semi-feeding four-row peanut combine harvester. Trans. Chin. Soc. Agric. Eng. 2018, 34, 10–18. [Google Scholar]
- Zhao, X.S.; Ran, W.J.; Hao, J.J.; Bai, W.J.; Yang, X.L. Design and experiment of the double-seed hole vines precision seed metering device for peanuts. Int. J. Agric. Biol. Eng. 2022, 15, 107–114. [Google Scholar]
- Xie, Y.K.; Lin, Y.W.; Li, X.Y.; Yang, H.; Han, J.H.; Shang, C.J.; Li, A.Q.; Xiao, H.W.; Lu, F.Y. Peanut drying: Effects of various drying methods on drying kinetic models, physicochemical properties, germination characteristics and microstructure. Inf. Process. Agric. 2022. [Google Scholar] [CrossRef]
- Wang, B.; Hu, Z.C.; Peng, B.L.; Zhang, Y.H.; Gu, F.W.; Shi, L.L.; Gao, X.M. Structure operation parameter optimization for elastic steel pole oscillating screen of semi-feeding four rows peanut combine harvester. Trans. Chin. Soc. Agric. Eng. 2017, 33, 20–28. [Google Scholar]
- National Bureau of Statistics of China. China Statistical Yearbook; China Statistics Press: Beijing, China, 2022. [Google Scholar]
- Food and Agriculture Organization (FAO) of the United Nations Database. 2022. Available online: http://faostat3.fao.org/download/Q/QC/E (accessed on 25 December 2022).
- Hu, Z.C. Study on Key Technologies of Half-Feed Peanut Combine Harvester; Nanjing Agricultural University: Nanjing, China, 2011. [Google Scholar]
- Chen, Z.Y.; Gao, L.X.; Chen, C.; Butts, C.L. Analysis on technology status and development of peanut harvest mechanization of China and the United States. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–21. [Google Scholar]
- Zhang, J.S. Exploring the main points of mechanization technology of peanut production. Shihezi Sci. Technol. 2022, 261, 6–7. [Google Scholar]
- Chen, M.D.; Zhai, X.T.; Zhang, H.; Yang, R.B.; Wang, D.W.; Shang, S.Q. Study on control strategy of the vine clamping conveying system in the peanut combine harvester. Comput. Electron. Agric. 2020, 178, 105744. [Google Scholar] [CrossRef]
- The Comprehensive Mechanization Rate of Peanuts in China has Reached 52.14%. 2017. Available online: http//www.nongjitong.com/news/2017/42210.html (accessed on 25 December 2022).
- Wang, B.; Gu, F.; Cao, M.; Xie, H.; Wu, F.; Peng, B.; Hu, Z. Analysis and Evaluation of the Influence of Different Drum Forms of Peanut Harvester on Pod-Pickup Quality. Agriculture 2022, 12, 769. [Google Scholar] [CrossRef]
- Zheng, J.S. Design and experiment of peanut digging and placing machine based on two-stage harvest. J. Agric. Mech. Res. 2022, 44, 133–139. [Google Scholar]
- Xu, T.; Shen, Y.Z.; Gao, L.X.; Zhang, X.D.; Lv, C.Y.; Liu, Z.X. Spring-finger peanut pickup mechanism based on two-stage harvest. Trans. Chin. Soc. Agric. Eng. 2016, 47, 90–97. [Google Scholar]
- Gao, L.X.; Chen, Z.Y.; Charles, C.; Butts, C.L. Development course of peanut harvest mechanization technology of the United States and enlightenment to China. Trans. Chin. Soc. Agric. Eng. 2017, 33, 1–9. [Google Scholar]
- AMADAS INDUSTRIES. Peanut Diggers. 2015. Available online: http://www.amadas.com/agriculture/peanuts/peanut-diggers (accessed on 25 December 2022).
- Kelly Manufacturing Co. Vine Conditioner and Vine Lifter. 2015. Available online: http://www.Kelleymfg.com/products/peanut/vine_conditioner_lifter.aspx (accessed on 25 December 2022).
- COLOMBO. Colombo Dump Cart 61.52.12. 2015. Available online: http://colombona.com/colombo-dump-cart-cta-61.52.12 (accessed on 25 December 2022).
- Mike, B. Peanut Digger and Combine Efficiency. Cooperative Extension of Colleges of Agricultural and Environmental Science; The University of Georgia: Athens, GA, USA, 2009. [Google Scholar]
- NC State University, BAE. Peanut Harvesting Equipment: Diggers and Combines. 2017. Available online: http://www.bae.ncsu.edu/topic/agmachine/farmequip/harvest/peanut_harvest_guide.htm (accessed on 25 December 2022).
- Wang, L.; Wei, J.J.; Li, Y. Development of peanut’s whole course mechanization in our country and the application in Xinjiang. Chin. Agric. Sci. Bull. 2014, 30, 161–168. [Google Scholar]
- Wang, Y.B. Development of 4HS-80 Peanut Harvester; Henan Province, Zhengzhou Xechuang Mechanical and Electrical Equipment Co., Ltd.: Zhengzhou, China, 2014. [Google Scholar]
- Shen, J.M. Research on 4H-1 peanut harvester. Mech. Rural. Pastor. Areas 2008, 1, 14–15. [Google Scholar]
- Hu, Z.C.; Peng, B.L.; Xie, H.X.; Tian, L.J.; Wang, H.O.; Wu, F. Design and Experiment of Peanut Hoist Chain Harvester. Trans. Chin. Soc. Agric. Mach. 2008, 11, 220–222. [Google Scholar]
- He, Y.C.; Tang, Z.H.; Yang, H.J.; Meng, X.J.; Qin, T.R.; Zhang, D.C. Design and experiment of 4HQ-150 peanut plucking harvester. J. Gansu Agric. Univ. 2018, 53, 180–186. [Google Scholar]
- Wang, G.; Wang, H.Y.; Zhao, Y.; Li, Y.L. A Kind of Tilting Peanut Excavator. CN213755725U, 23 July 2021. [Google Scholar]
- Ma, Y.; Wang, Y.J. A Kind of Peanut Excavator and Its Flipping Device. CN213427033U, 15 June 2021. [Google Scholar]
- Guo, H.; Guo, W.H. A Small Peanut Digging and Recycling Machine. CN209151579U, 26 July 2019. [Google Scholar]
- Gao, L.X.; Wang, D.W.; Dong, H.S. Design and Test of Turnover Laying Device of Peanut Harvester. J. Shenyang Agric. Univ. 2016, 47, 57–63. [Google Scholar]
- Wang, S.Y.; Hu, Z.C.; Chen, Y.Q.; Wu, H.C.; Wang, Y.W.; Wu, F.; Gu, F.W. Integration of agricultural machinery and agronomy for mechanised peanut production using the vine for animal feed. Biosyst. Eng. 2022, 219, 113–152. [Google Scholar] [CrossRef]
- Wang, B.K.; W, N.; Hu, Z.C.; Wang, H.O.; Chen, Y.Q. Experience and thought of development of peanut harvesting mechanization at home and abroad. J. Chin. Agric. Mech. 2011, 4, 6–9. [Google Scholar]
- Mao, S.S.; Zhao, J.X.; Chen, Y. Experimental Design; China Statistics Press: Beijing, China, 2014. [Google Scholar]
- DB34/T534-2022; Technical Specification for Mechanization of Peanut Harvesting. Local Standard of Anhui Province: Hefei, China, 2022.
- DG/T077-2019; Peanut Harvest. Agricultural Machinery Extension Appraisal Outline: Beijing, China, 2019.
- Xu, X.H.; He, M.Z. Experimental Design and Application of Design Expert and SPSS; Scientific Press: Beijing, China, 2010. [Google Scholar]
- Wang, S.Y.; Hu, Z.C.; Yao, L.J.; Peng, B.L.; Wang, B.; Wang, Y.W. Simulation and parameter optimisation of pickup device for full-feed peanut combine harvester. Comput. Electron. Agric. 2022, 192, 106602. [Google Scholar] [CrossRef]
- Yang, H.; Cao, M.; Wang, B.; Hu, Z.; Xu, H.; Wang, S.; Yu, Z. Design and Test of a Tangential-Axial Flow Picking Device for Peanut Combine Harvesting. Agriculture 2022, 12, 179. [Google Scholar] [CrossRef]
- Tian, L.X.; Shang, S.Q.; Wang, D.W.; Shen, S.L. Development and experiment of 4HT-2 peanut strip laying harvester. Agric. Mech. Res. 2018, 40, 87–91. [Google Scholar]
- Yu, W.J.; Yang, R.B.; Shang, S.Q.; Shi, C.; Yang, H.G. Shovel sieve modular design and test of peanut segment harvester. J. Agric. Mech. Res. 2016, 38, 163–166, 171. [Google Scholar]
- Zhao, S.J.; Wang, D.W.; Wang, Y.Y.; Luan, G.D.; Sun, Q.W. Orderly laid the development of peanut harvester. J. Agric. Mech. Res. 2013, 35, 73–75, 79. [Google Scholar]
- Guo, W.H.; Guo, H.; Yu, X.D.; Wang, M.C.; Xing, S.K.; Peng, B. Based on a two-part process of peanut harvest machine is designed with the test. J. Chin. Agric. Mech. 2020, 9, 34–39. [Google Scholar]
Figure 1.
Agronomic process of peanut in two-stage operation mode.

Figure 2.
Peanut digger-inverter: 1. Depth limiting roller 2. V-shaped digging shovel 3. Vines guide rod 4. Rear wheel 5. inverting roller 6. Collecting plate 7. Inverting rod 8. Harrow teeth 9. Back loop conveyor chain 10. Frame 11. Transmission assembly.
Figure 2.
Peanut digger-inverter: 1. Depth limiting roller 2. V-shaped digging shovel 3. Vines guide rod 4. Rear wheel 5. inverting roller 6. Collecting plate 7. Inverting rod 8. Harrow teeth 9. Back loop conveyor chain 10. Frame 11. Transmission assembly.

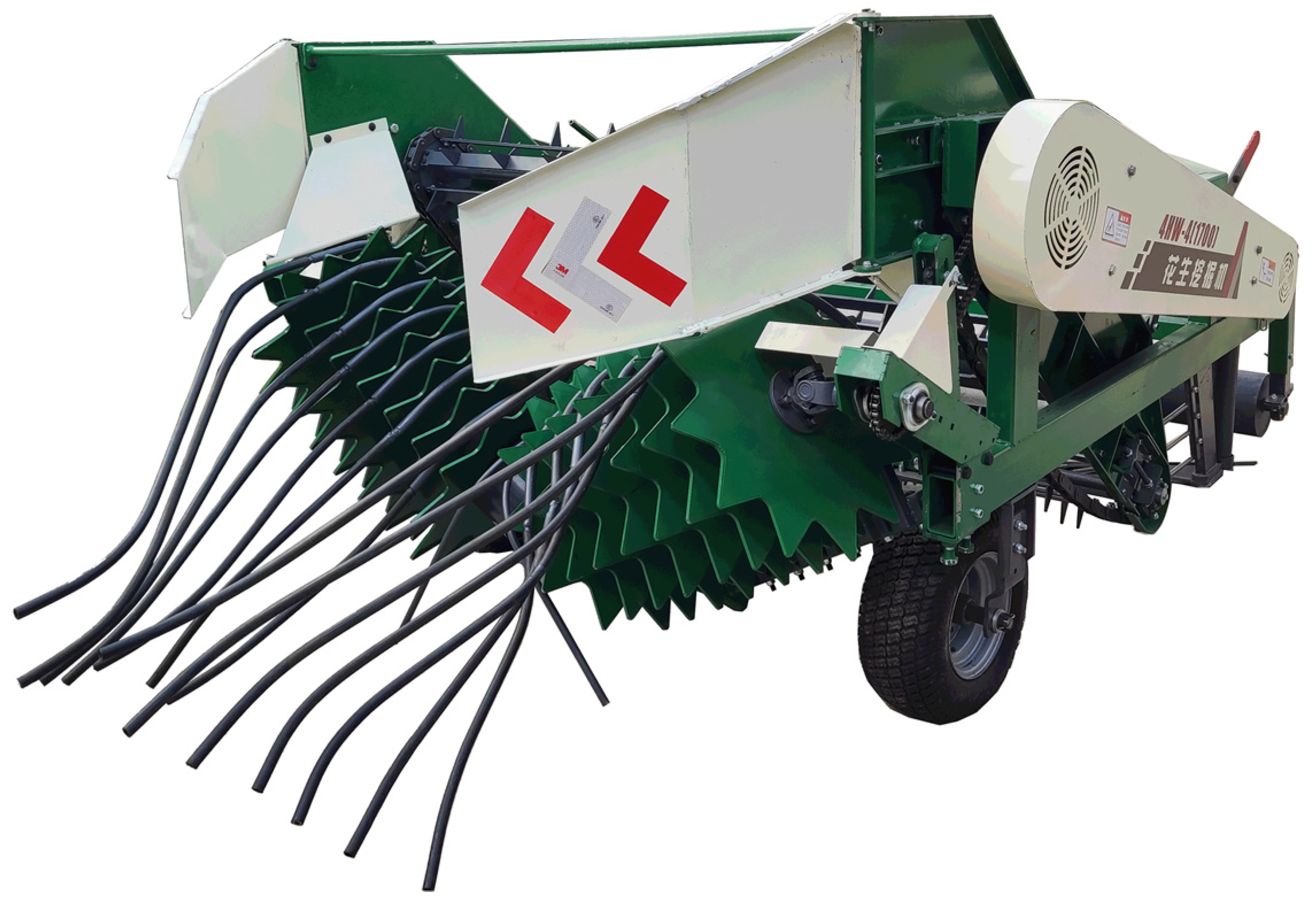
Figure 3.
Peanut digger-inverter experimental machine.

Figure 4.
Field experiment flow of peanut digger-inverter: (a) The process of field experiment of peanut digger-inverter. (b) The effect of peanut digger-inverter after field operation. (c) Random 3 m sampling of a stroke after peanut operation. (d) The sampled peanuts were picked manually. (e) The buried pod, fallen pod, and total pod weight of peanuts shall be weighed after operation.
Figure 4.
Field experiment flow of peanut digger-inverter: (a) The process of field experiment of peanut digger-inverter. (b) The effect of peanut digger-inverter after field operation. (c) Random 3 m sampling of a stroke after peanut operation. (d) The sampled peanuts were picked manually. (e) The buried pod, fallen pod, and total pod weight of peanuts shall be weighed after operation.


Figure 5.
Range analysis of unpressed vines experiment results; (a) Pm, (b) Ps, (c) Pf.

Figure 6.
Range analysis of pressed vine experiment results, (a) Pm, (b) Ps, (c) Pf.

Figure 7.
Box diagram of paired samples. (a) the rate of vines inverting; (b) the rate of buried pods; (c) the rate of fallen pods.
Figure 7.
Box diagram of paired samples. (a) the rate of vines inverting; (b) the rate of buried pods; (c) the rate of fallen pods.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Structural parameters and technical parameters of peanut digger-inverter.
| Parameters | Design Value |
|---|---|
| Type | Suspension-type |
| Machine dimensions: size (Length × width × height)/(mm × mm × mm) | 3500 × 2100 × 1550 |
| Total weight/kg | 1500 |
| Most suitable row spacing/mm | 800 |
| Numbers of ridge | Double ridge |
| Working width/mm | 1800 |
| Digging depth/mm | ≤250 |
| Travelling speed/(m/s) | 0.7~1.3 |
| Efficiency/(ha/h) | 0.45~0.84 |
Table 2.
Test factors and levels.
| Factors | Levels | ||
|---|---|---|---|
| 1 | 2 | 3 | |
| Traveling speed of the tractor A/(m/s) | 0.7~0.9 | 0.9~1.1 | 1.1~1.3 |
| Line speed of the conveyor chain B/(m/s) | 0.84 | 1.02 | 1.13 |
| Line speed of the inverting roller C/(m/s) | 1.57 | 1.88 | 2.12 |
Note: The travelling speed of the tractor is not the same value every time measured, so the values of the three levels are range values.
Table 3.
Experimental design and results of unpressed vines.
| Test Number | Travelling Speed of the Tractor A/(m/s) | Line Speed of the Conveyor Chain B/(m/s) | Line Speed of the Inverting Roller C/(m/s) | Rate of Vines Inverting Pf/(%) | Rate of Buried Pods Pm/(%) | Rate of Fallen Pods Ps/(%) |
|---|---|---|---|---|---|---|
| 1 | 1 (0.89) | 1 (0.84) | 1 (1.57) | 55.56 | 0 | 0.08 |
| 2 | 1 (0.86) | 2 (1.02) | 2 (1.88) | 68.06 | 0.18 | 0.35 |
| 3 | 1 (0.84) | 3 (1.13) | 3 (2.12) | 60 | 0.21 | 0.19 |
| 4 | 2 (1.04) | 1 (0.84) | 2 (1.88) | 64.29 | 0.15 | 0.72 |
| 5 | 2 (1.01) | 2 (1.02) | 3 (2.12) | 69.7 | 0.13 | 0.23 |
| 6 | 2 (1.05) | 3 (1.13) | 1 (1.57) | 62.5 | 0.12 | 0.44 |
| 7 | 3 (1.25) | 1 (0.84) | 3 (2.12) | 65.31 | 0.77 | 0.77 |
| 8 | 3 (1.29) | 2 (1.02) | 1 (1.57) | 72.73 | 1.32 | 0.54 |
| 9 | 3 (1.13) | 3 (1.13) | 2 (1.88) | 73.44 | 1.08 | 1.45 |
Table 4.
Experimental variance analysis of unpressed vines.
| Indexes | Variance Source | Sum of Squares | Free Degree | F-Value | p-Value | Significance |
|---|---|---|---|---|---|---|
| Pf | A | 129.613 | 2 | 95.98 | 0.01 | ** |
| B | 107.724 | 2 | 79.771 | 0.012 | ** | |
| C | 39.891 | 2 | 29.539 | 0.033 | ** | |
| Error | 1.35 | 2 | ||||
| T | 278.579 | 8 | ||||
| Pm | A | 1.711 | 2 | 25.141 | 0.038 | * |
| B | 0.088 | 2 | 1.294 | 0.436 | ||
| C | 0.022 | 2 | 0.326 | 0.754 | ||
| Error | 0.068 | 2 | ||||
| T | 1.89 | 8 | ||||
| Ps | A | 0.783 | 2 | 47.567 | 0.021 | ** |
| B | 0.154 | 2 | 9.34 | 0.097 | * | |
| C | 0.435 | 2 | 26.433 | 0.036 | ** | |
| Error | 0.016 | 2 | ||||
| T | 1.389 | 8 |
(Pf) R square = 0.995, (Pm) R square = 0.964, (Ps) R square = 0.988. Note: The critical value of significant judgment F0.01(2,2) = 99, F0.05(3,3) = 19, F0.1(2,2) = 9. * Indicates that the factors have some influence on the test index (0.05 < p ≤ 0.1), ** indicates that the factors have a significant influence on the test index (0.01 < p ≤ 0.05).
Table 5.
Summary of results of unpressed vines.
| Index | Factor Importance Order | The Best Level and the Next Best Level | ||
|---|---|---|---|---|
| A | B | C | ||
| Pf | A, B, C | A3 or A2 | B2 | C2 or C3 |
| Pm | A | A1 and A2 | ||
| Ps | A, C, B | A1 or A2 | B2 | C1 or C3 |
Table 6.
Experimental design and results of pressed vines.
| Test Number | Travelling Speed of the Tractor A/(m/s) | Line Speed of the Conveyor Chain B/(m/s) | Line Speed of the Inverting Roller C/(m/s) | Rate of Vines Inverting Pf/(%) | Rate of Buried Pods Pm/(%) | Rate of Fallen Pods Ps/(%) |
|---|---|---|---|---|---|---|
| 1 | 1 (0.74) | 1 (0.84) | 1 (1.57) | 60 | 0.13 | 0.36 |
| 2 | 1 (0.71) | 2 (1.02) | 2 (1.88) | 73.77 | 0.19 | 0.38 |
| 3 | 1 (0.82) | 3 (1.13) | 3 (2.12) | 66.67 | 0.37 | 0.6 |
| 4 | 2 (0.96) | 1 (0.84) | 2 (1.88) | 67.8 | 0.1 | 0.39 |
| 5 | 2 (1.01) | 2 (1.02) | 3 (2.12) | 68.18 | 0.36 | 0.89 |
| 6 | 2 (1.09) | 3 (1.13) | 1 (1.57) | 67.69 | 0.76 | 0.93 |
| 7 | 3 (1.26) | 1 (0.84) | 3 (2.12) | 70.97 | 0.79 | 1.02 |
| 8 | 3 (1.29) | 2 (1.02) | 1 (1.57) | 77.92 | 0.89 | 1.15 |
| 9 | 3 (1.15) | 3 (1.13) | 2 (1.88) | 80.49 | 0.8 | 0.8 |
Table 7.
Experimental variance analysis of pressed vines.
| Indexes | Variance Source | Sum of Squares | Free Degree | F-Value | p-Value | Significance |
|---|---|---|---|---|---|---|
| Pm | A | 167.662 | 2 | 53.935 | 0.018 | ** |
| B | 80.997 | 2 | 26.056 | 0.037 | ** | |
| C | 59.376 | 2 | 19.1 | 0.05 | ** | |
| Error | 3.109 | 2 | ||||
| T | 311.144 | 8 | ||||
| Ps | A | 0.564 | 2 | 14.419 | 0.065 | * |
| B | 0.138 | 2 | 3.538 | 0.22 | ||
| C | 0.081 | 2 | 2.071 | 0.326 | ||
| Error | 0.039 | 2 | ||||
| T | 0.822 | 8 | ||||
| Pf | A | 0.443 | 2 | 32.556 | 0.03 | ** |
| B | 0.083 | 2 | 6.07 | 0.141 | ||
| C | 0.183 | 2 | 13.421 | 0.069 | * | |
| Error | 0.014 | 2 | ||||
| T | 0.723 | 8 |
(Pf) R square = 0.99, (Pm) R square = 0.952, (Ps) R square = 0.981. Note: The critical value of significant judgment F0.01(2,2) = 99, F0.05(3,3) = 19, F0.1(2,2) = 9. * indicates that the factors have some influence on the test index (0.05 < p ≤ 0.1), ** indicates that the factors have a significant influence on the test index (0.01 < p ≤ 0.05).
Table 8.
Summary of results of pressed vines.
| Index | Factor Importance Order | The Best Level and the Next Best Level | ||
|---|---|---|---|---|
| A | B | C | ||
| Pf | A, B, C | A3 or A2 | B2 | C2 |
| Pm | A | A1 or A2 | ||
| Ps | A, C | A1 or A2 | C2 | |
Table 9.
Correlation of paired samples.
| Sample Group | Correlation | p-Value | Significance |
|---|---|---|---|
| Traveling speed of tractor A | 0.913 | 0.001 | *** |
| Line speed of the conveyor chain B | 0.787 | 0.012 | ** |
| Line speed of the inverting roller C | 0.281 | 0.464 |
Note: The critical value of significant judgment t0.01(8) = 2.896, t0.05(8) = 1.86, t0.1(8) = 1.397. ** indicates that the factors have a significant influence on the test index (0.01 < p ≤ 0.05), *** indicates that the factors have a very significant influence on the test index (p ≤ 0.01).
Table 10.
Paired sample test.
| Sample Group | T | df | p-Value | Significance |
|---|---|---|---|---|
| Traveling speed of tractor A | −5.479 | 8 | 0.001 | *** |
| Line speed of the conveyor chain B | −0.468 | 8 | 0.652 | |
| Line speed of the inverting roller C | −1.326 | 8 | 0.222 |
Note: The critical value of significant judgment t0.01(8) = 2.896, t0.05(8) = 1.86, t0.1(8) = 1.397. *** indicates that the factors have a very significant influence on the test index (p ≤ 0.01).
Table 11.
Comparison of test results of performance indices.
| Type of Peanut Harvesting Structure | Sources | Performance Indexes | |
|---|---|---|---|
| Rate of Vines Inverting/(%) | Rate of Fallen Pods/(%) | ||
| The peanut digger-inverter | This study (unpressed vines) | 71.07 | 0.22 |
| This study (pressed vines) | 74.29 | 0.33 | |
| Turnover Laying Device | Ref. [32] | 72 | 2.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Shen, H.; Yang, H.; Gao, Q.; Gu, F.; Hu, Z.; Wu, F.; Chen, Y.; Cao, M. Experimental Research for Digging and Inverting of Upright Peanuts by Digger-Inverter. Agriculture 2023, 13, 847. https://doi.org/10.3390/agriculture13040847
AMA Style
Shen H, Yang H, Gao Q, Gu F, Hu Z, Wu F, Chen Y, Cao M. Experimental Research for Digging and Inverting of Upright Peanuts by Digger-Inverter. Agriculture. 2023; 13(4):847. https://doi.org/10.3390/agriculture13040847
Chicago/Turabian StyleShen, Haiyang, Hongguang Yang, Qimin Gao, Fengwei Gu, Zhichao Hu, Feng Wu, Youqing Chen, and Mingzhu Cao. 2023. "Experimental Research for Digging and Inverting of Upright Peanuts by Digger-Inverter" Agriculture 13, no. 4: 847. https://doi.org/10.3390/agriculture13040847
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.