
Numerical Simulation of the Picking Process of Supernormal Jujube Branches


 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
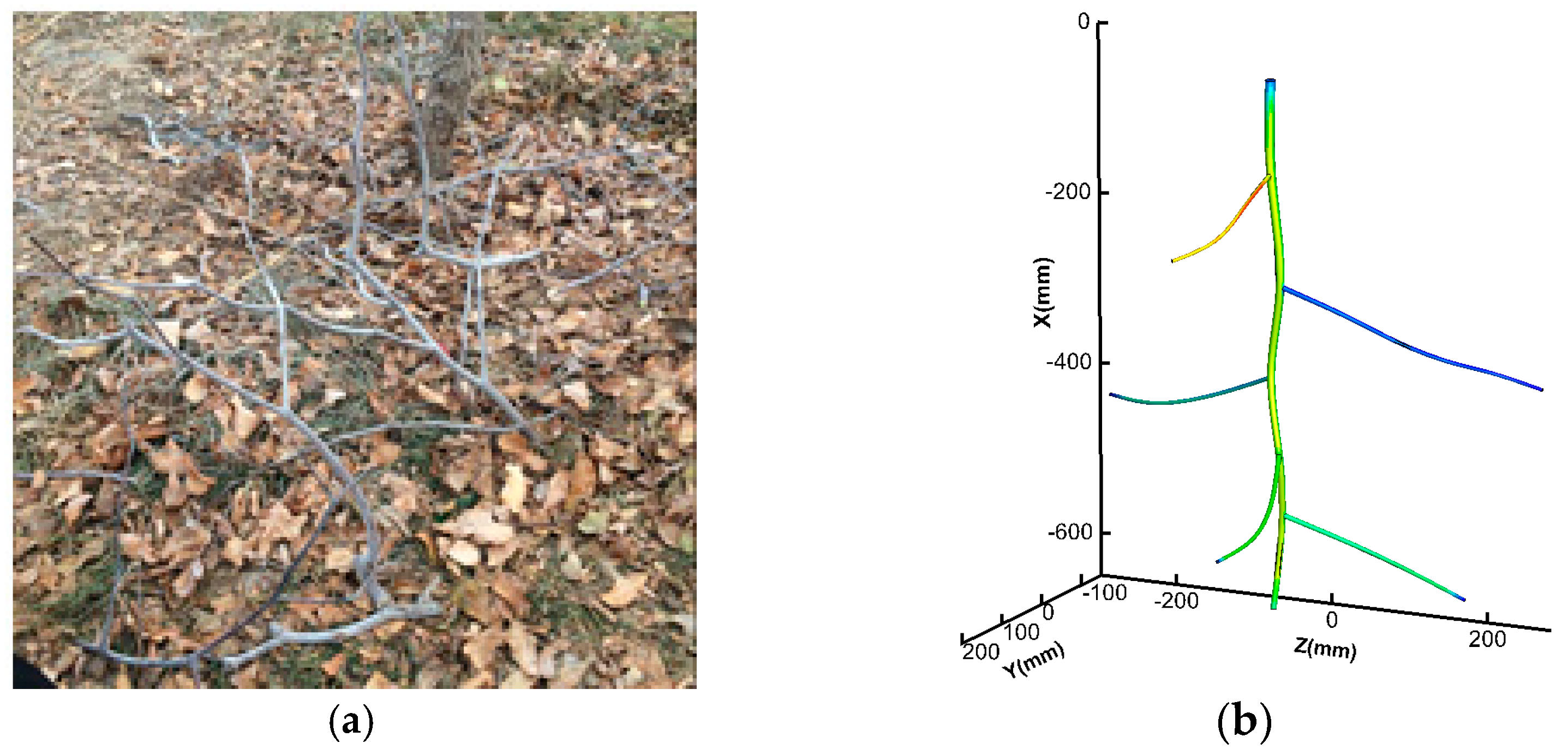
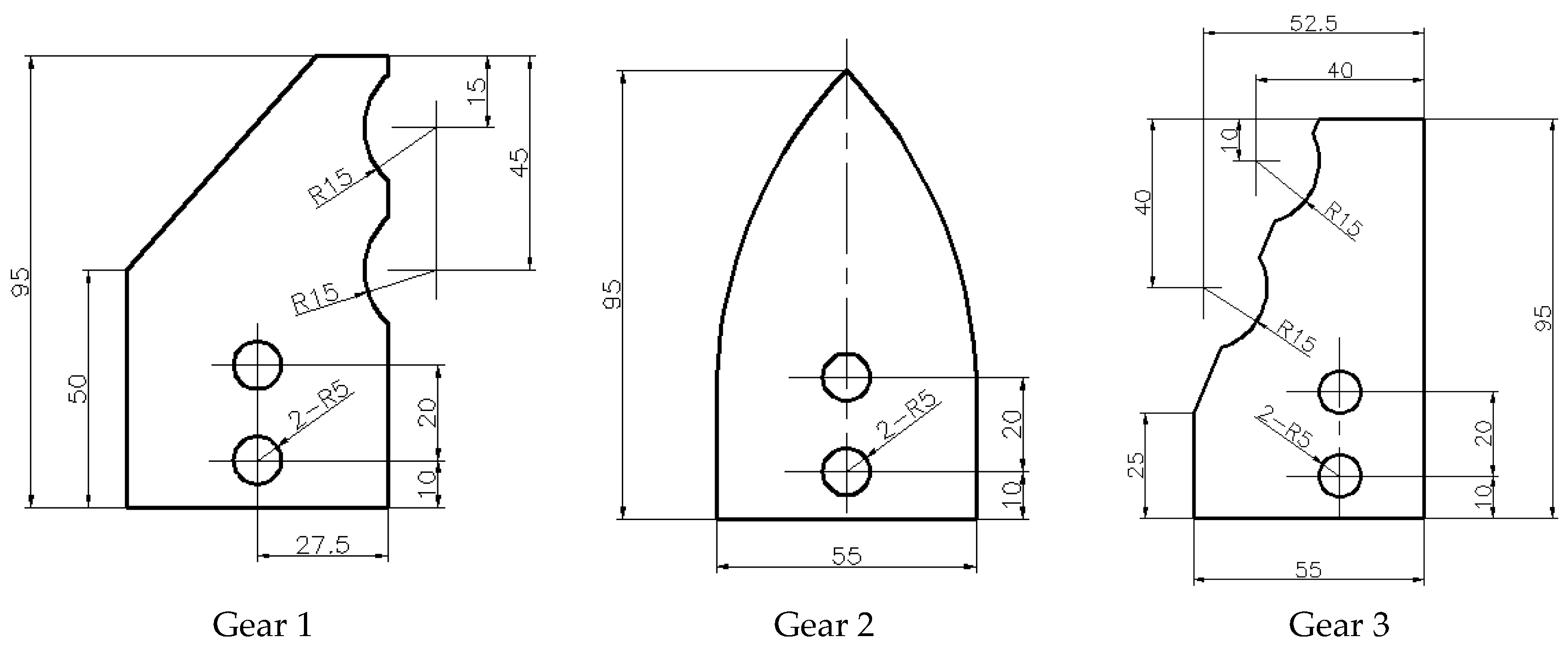
2.1. Jujube Branches Model
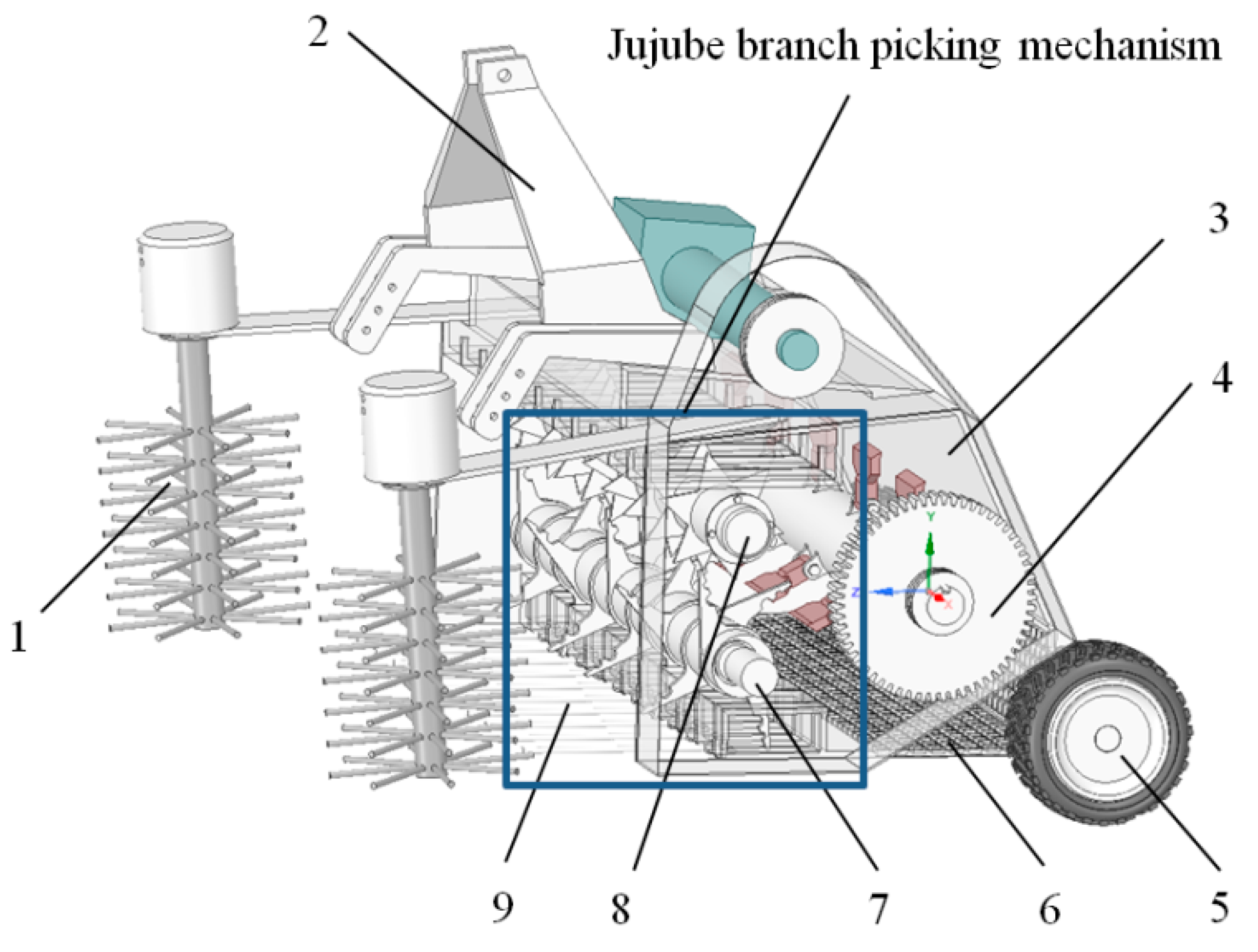
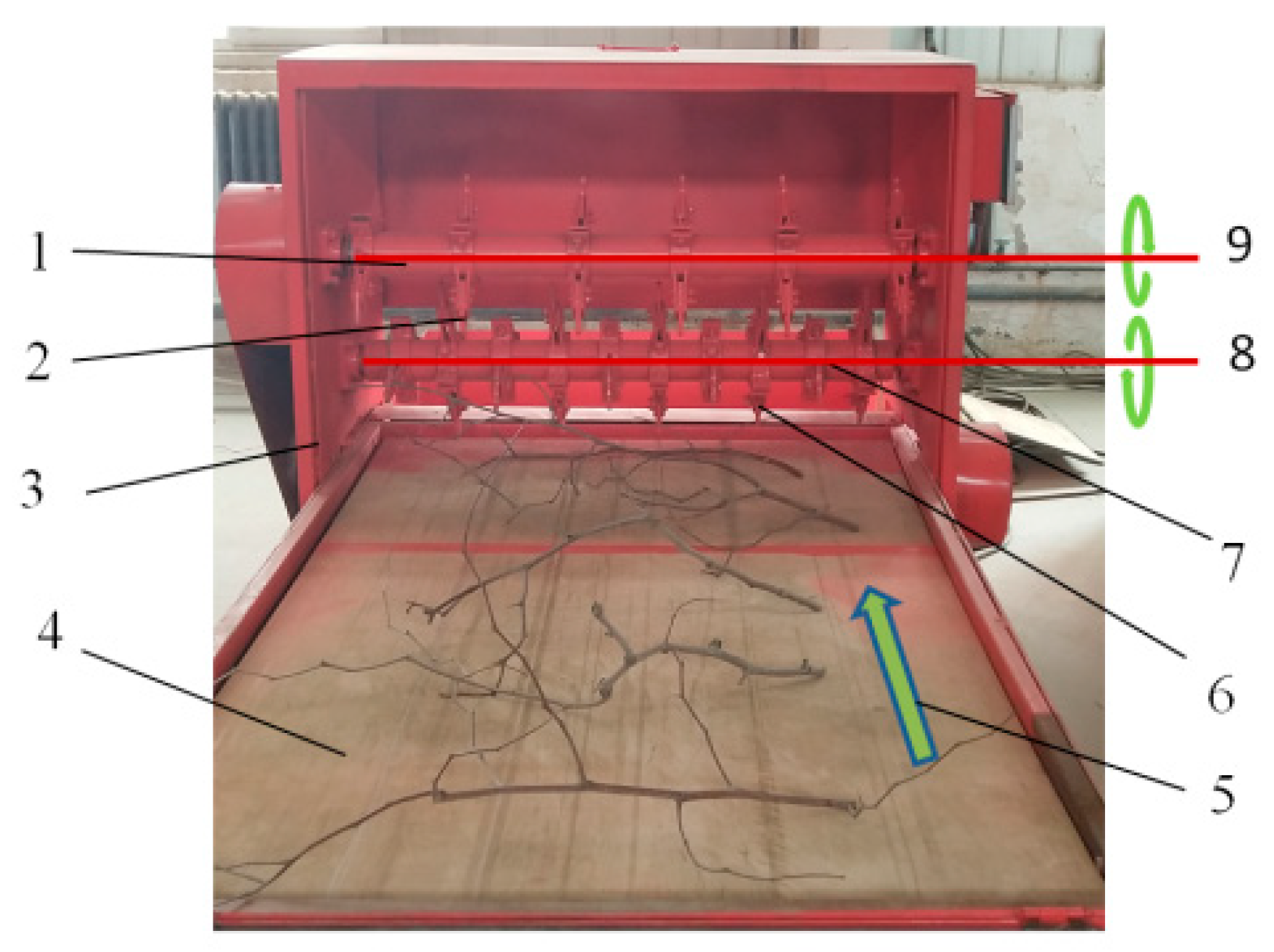
2.2. Jujube Picking Mechanism
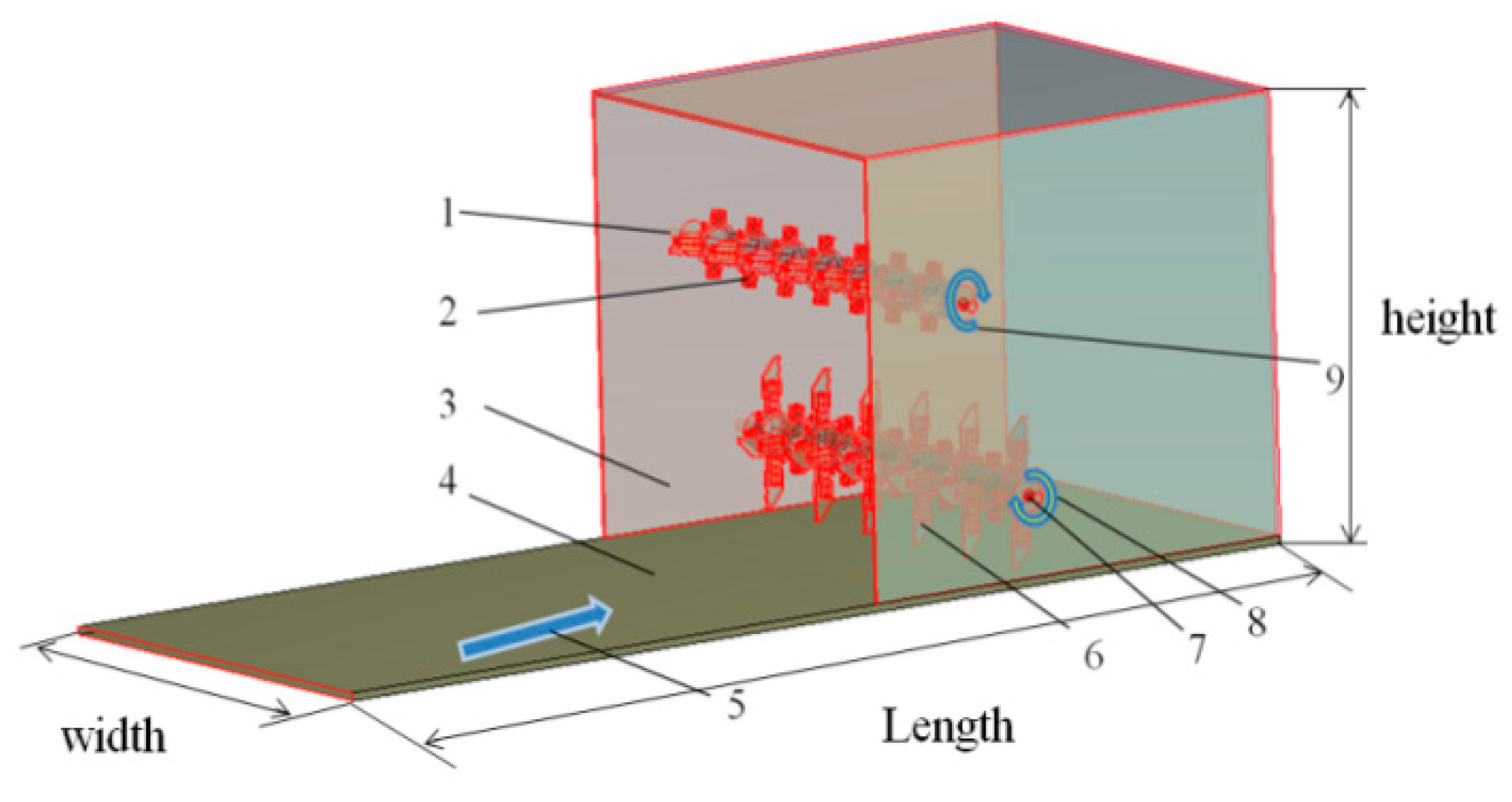
2.3. Numerical Methods
2.4. Simulation Parameters
3. Results and Discussions
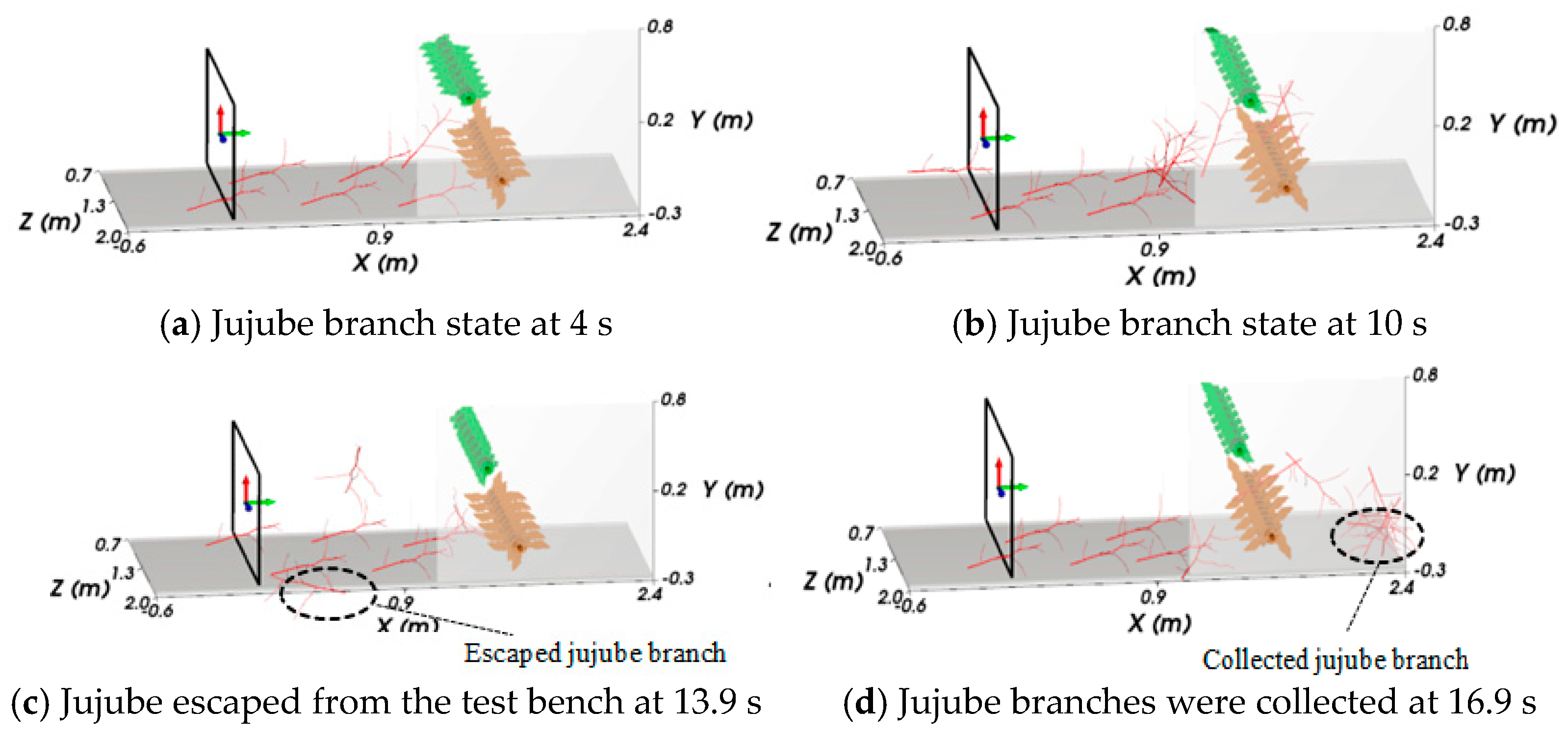
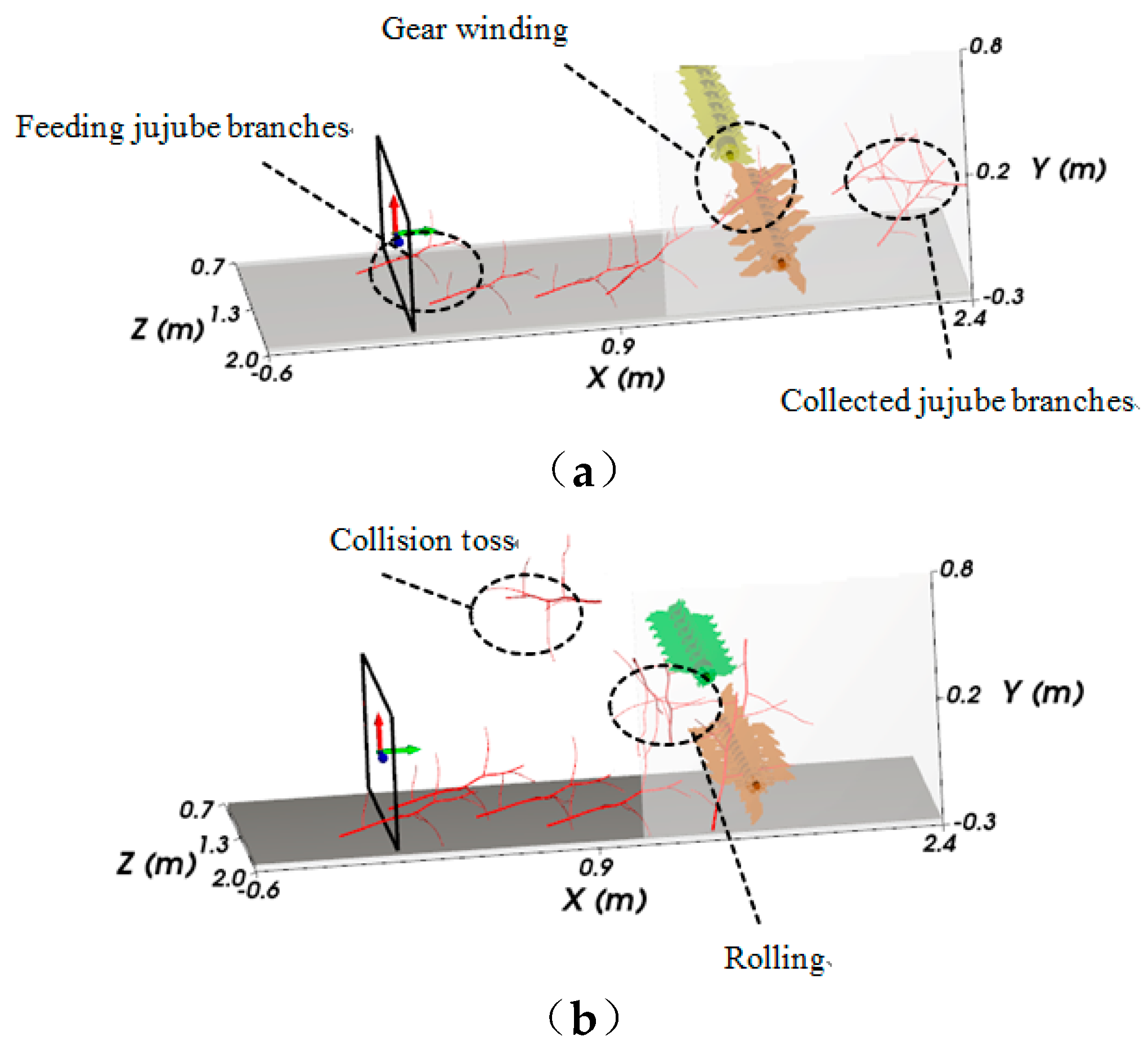
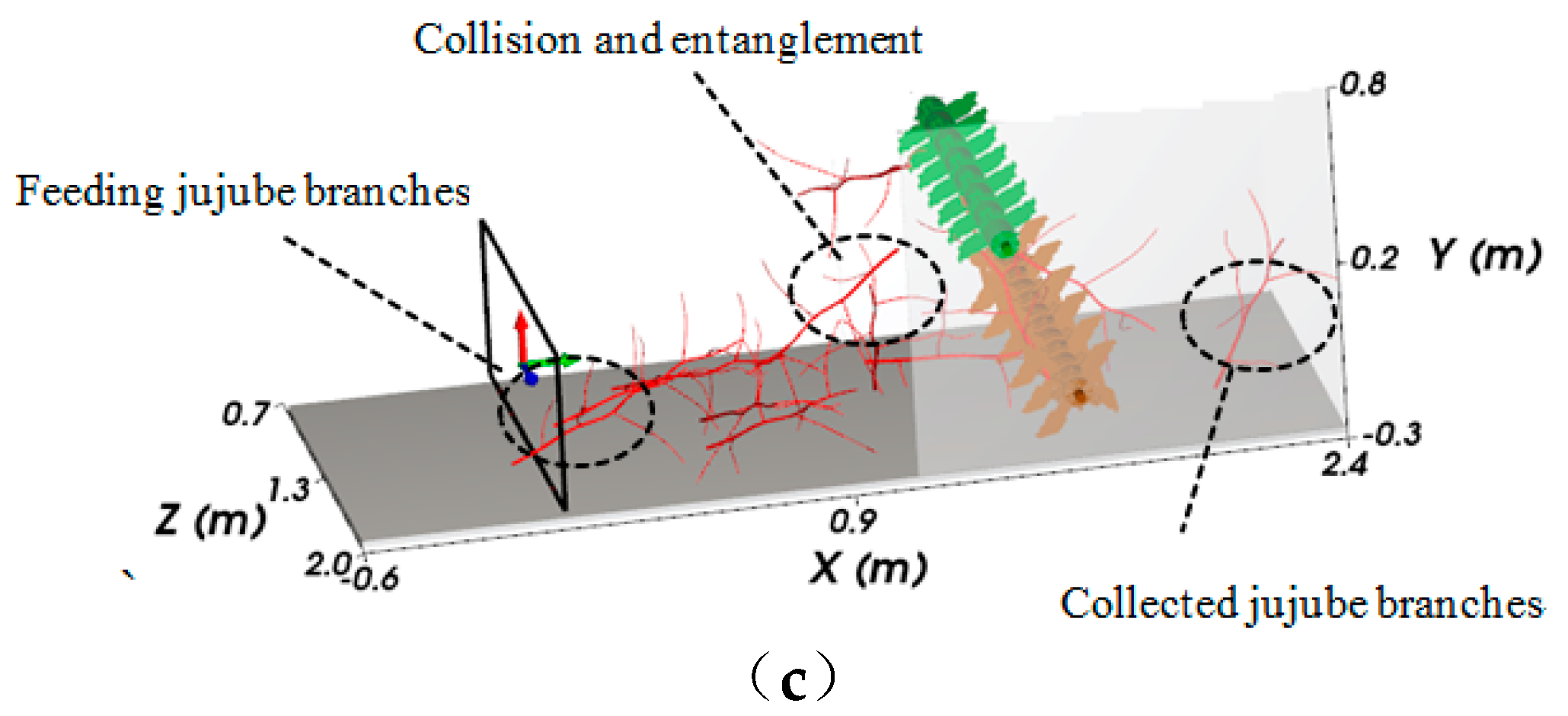
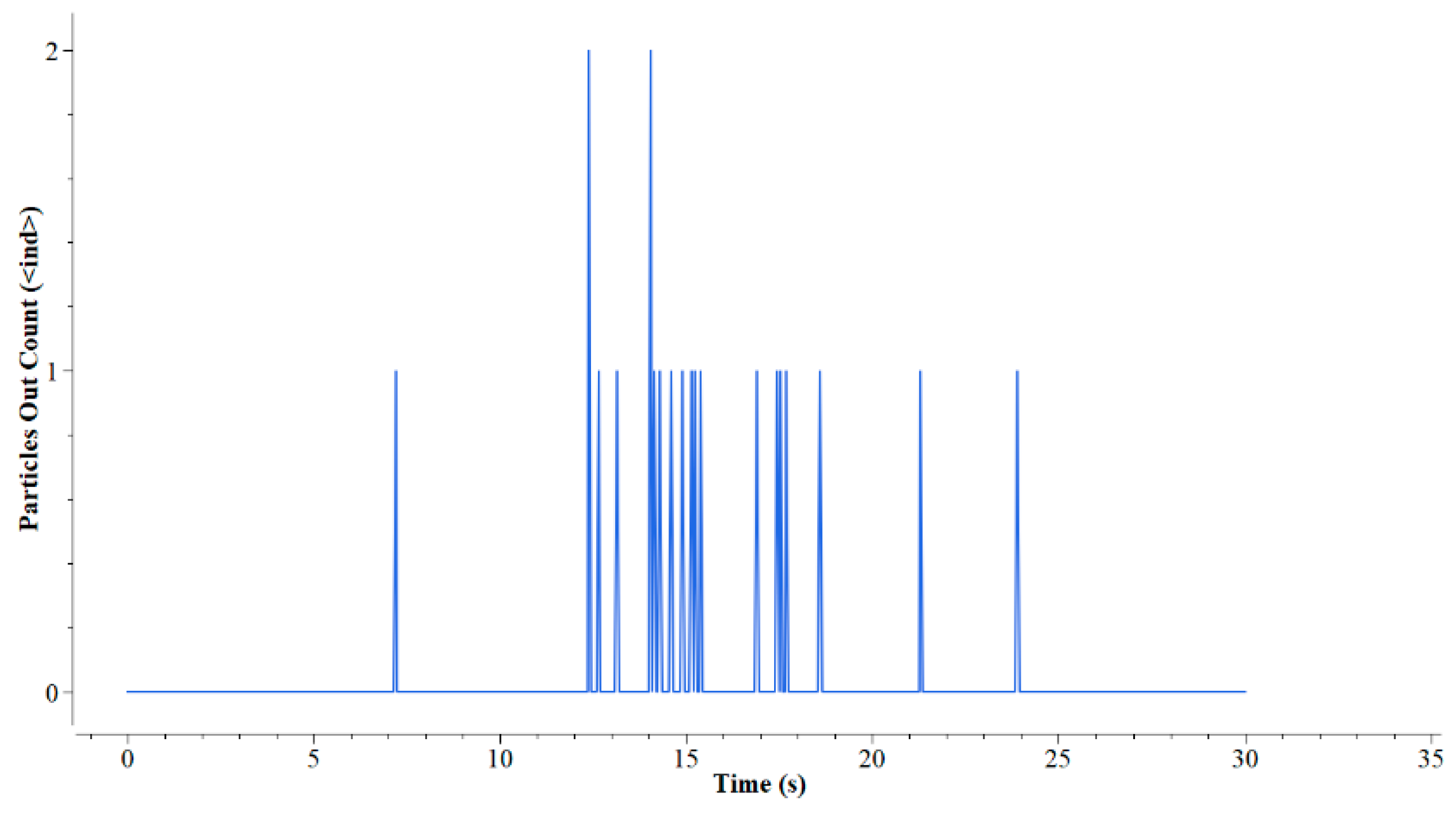
3.1. Numerical Analysis of Movement during Jujube Branch Picking
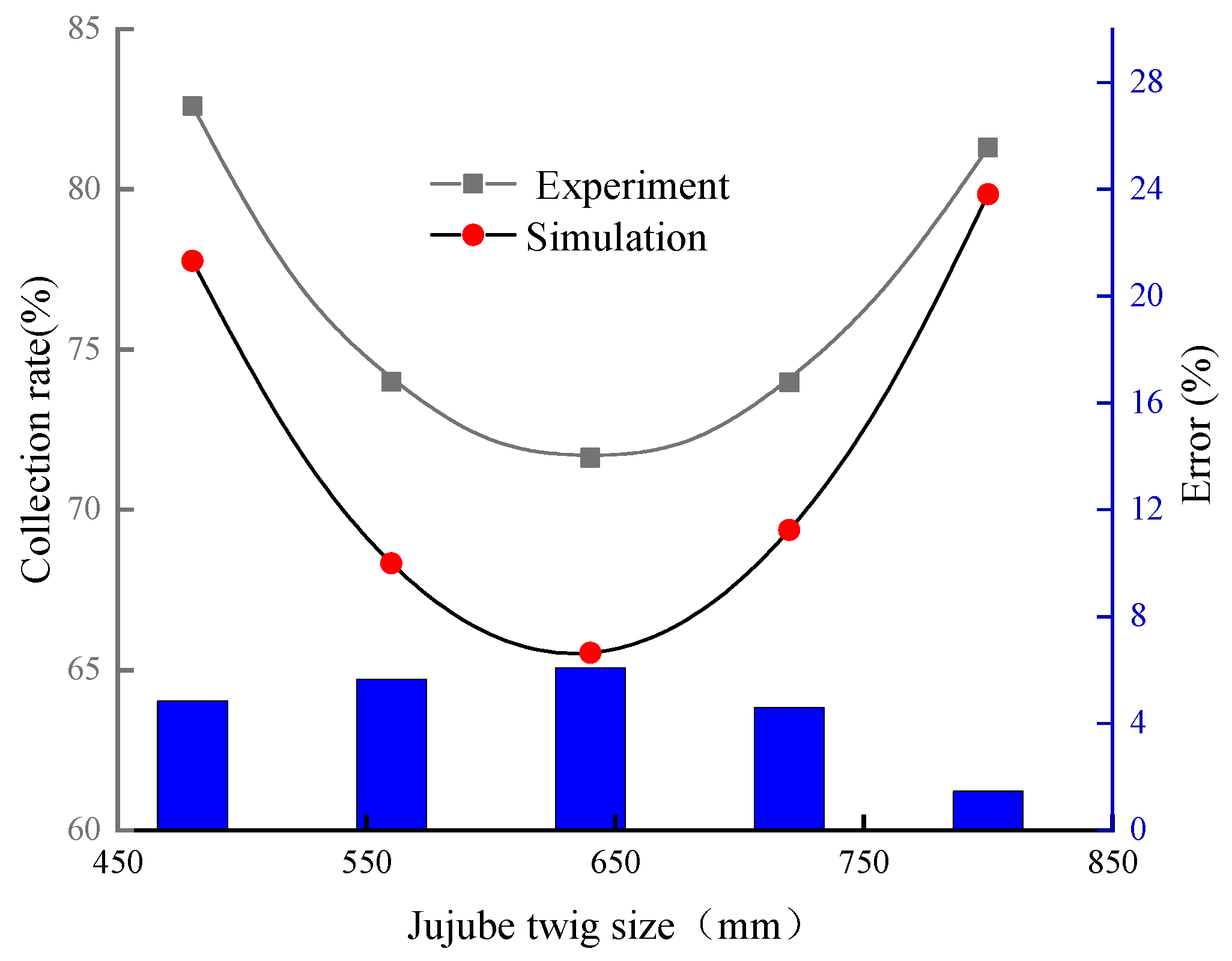
3.2. Influence of Jujube Branch Size on Picking Rate
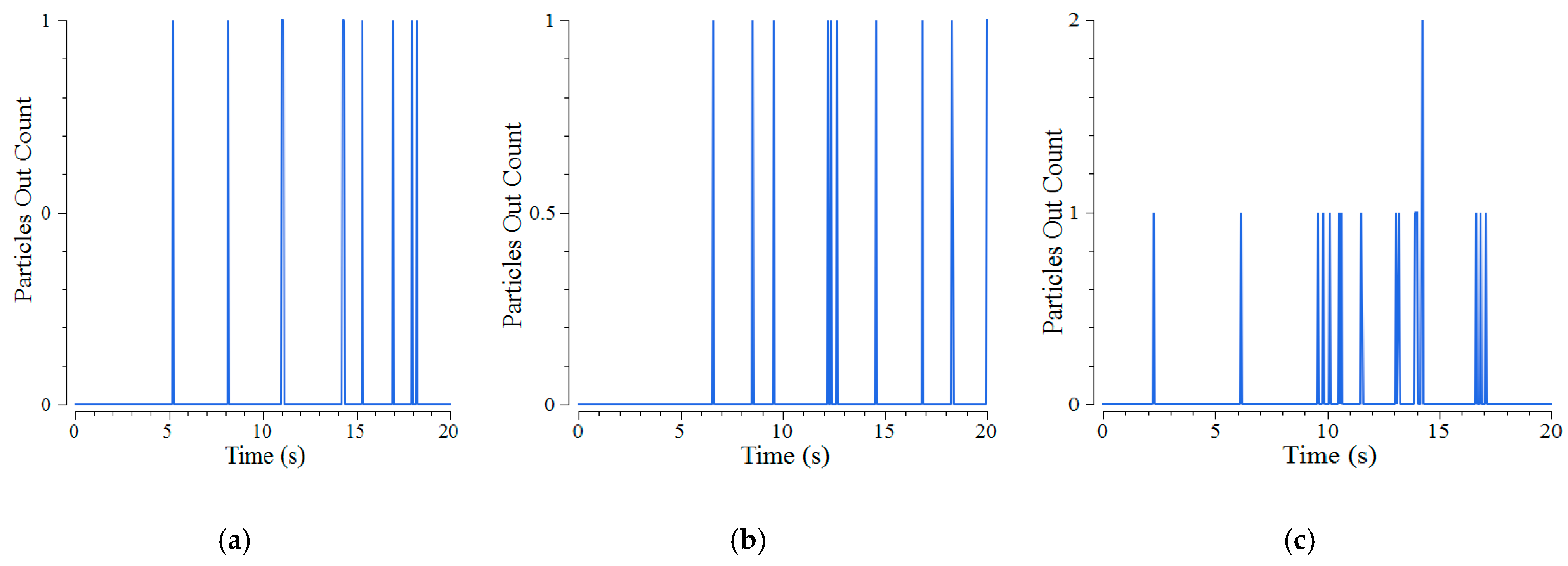
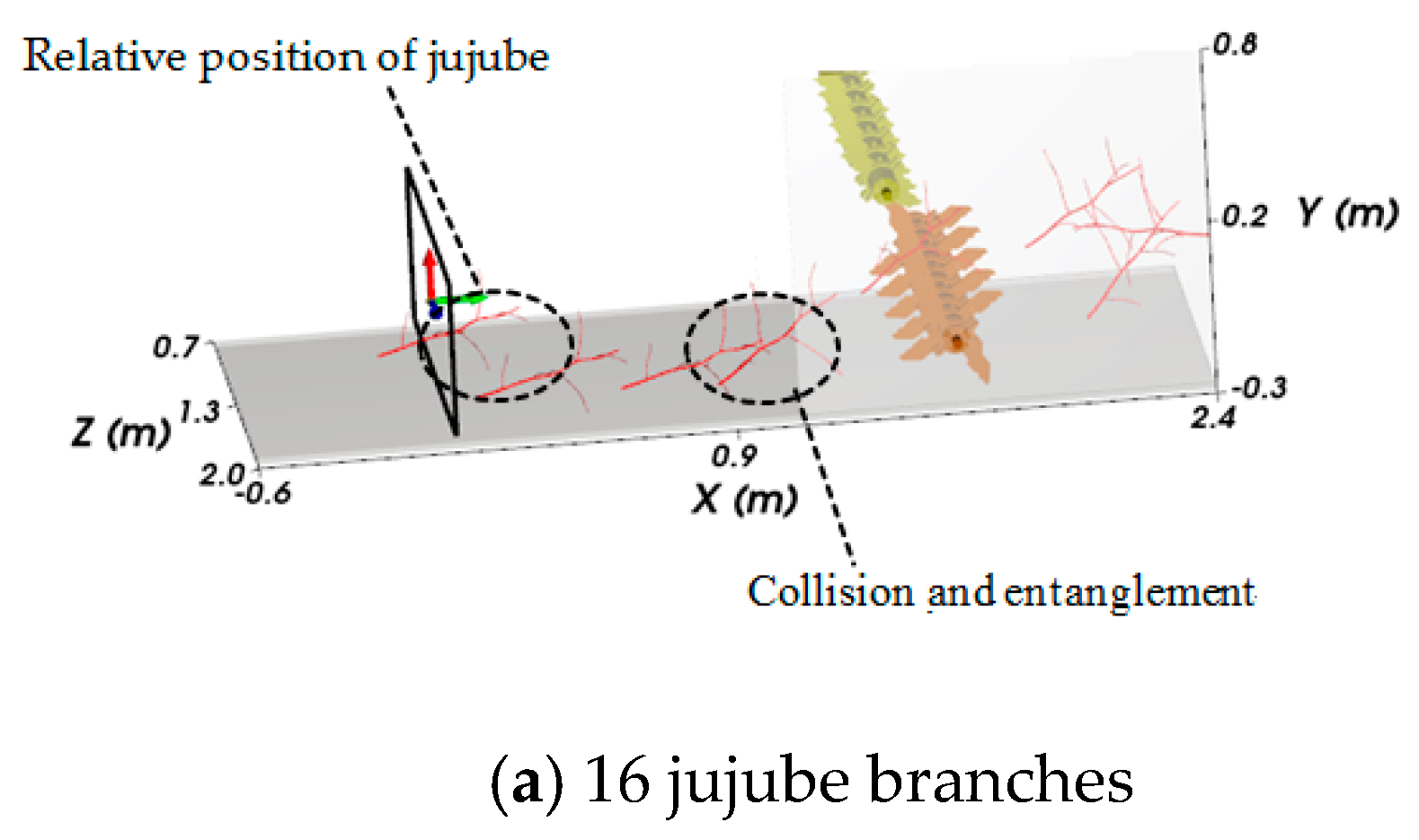
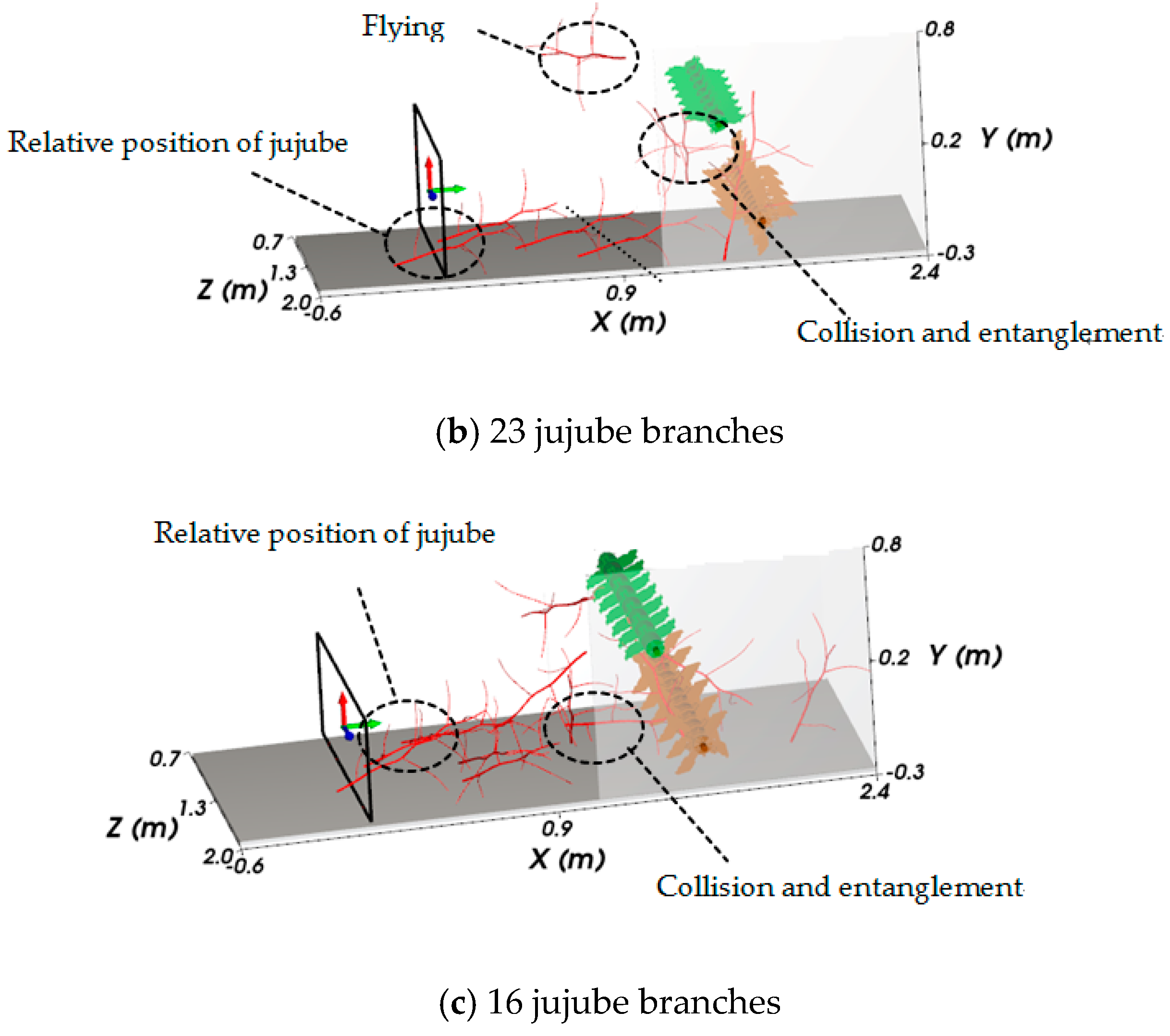
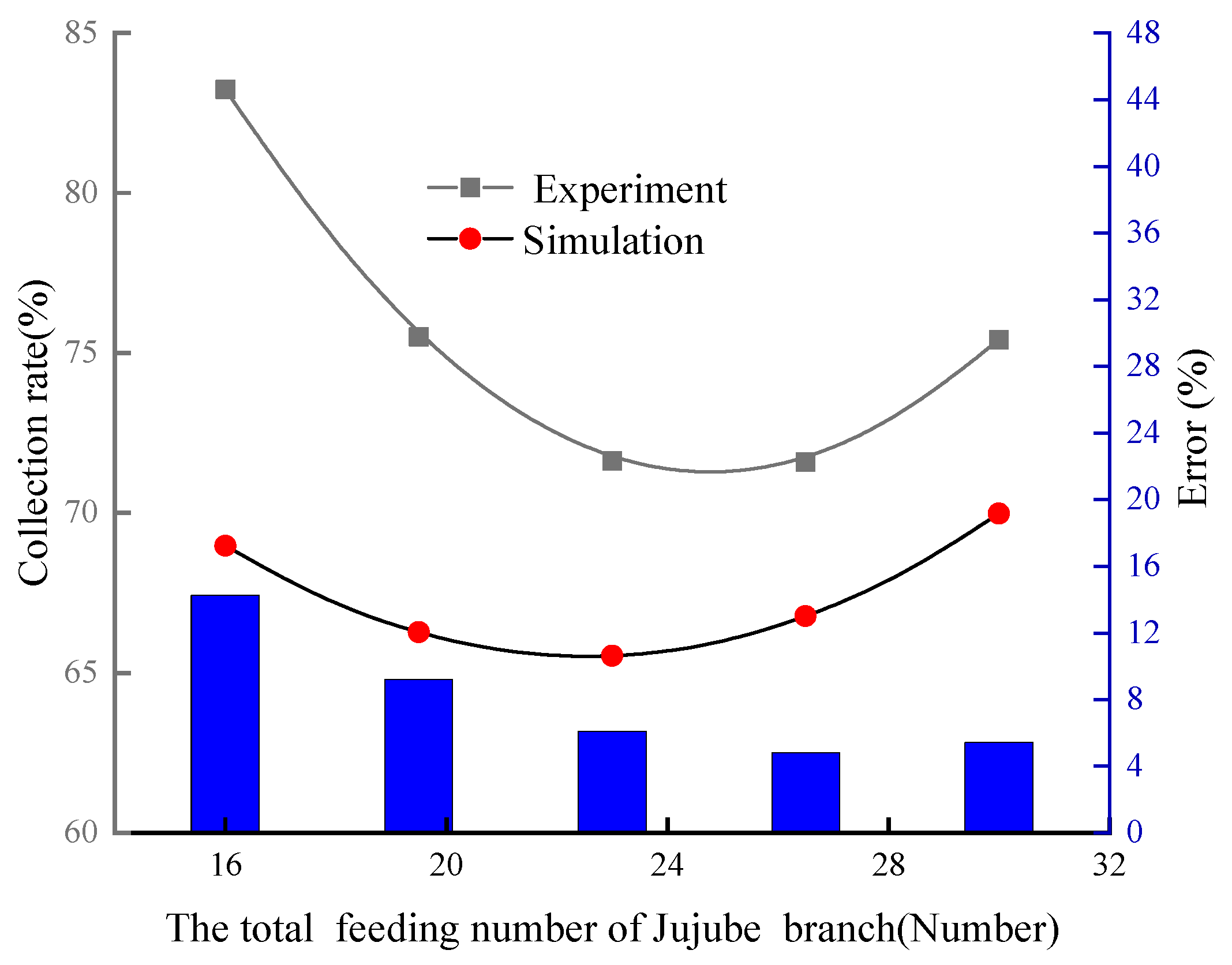
3.3. Influence of the Total Number of Jujube Branches on Picking Rate
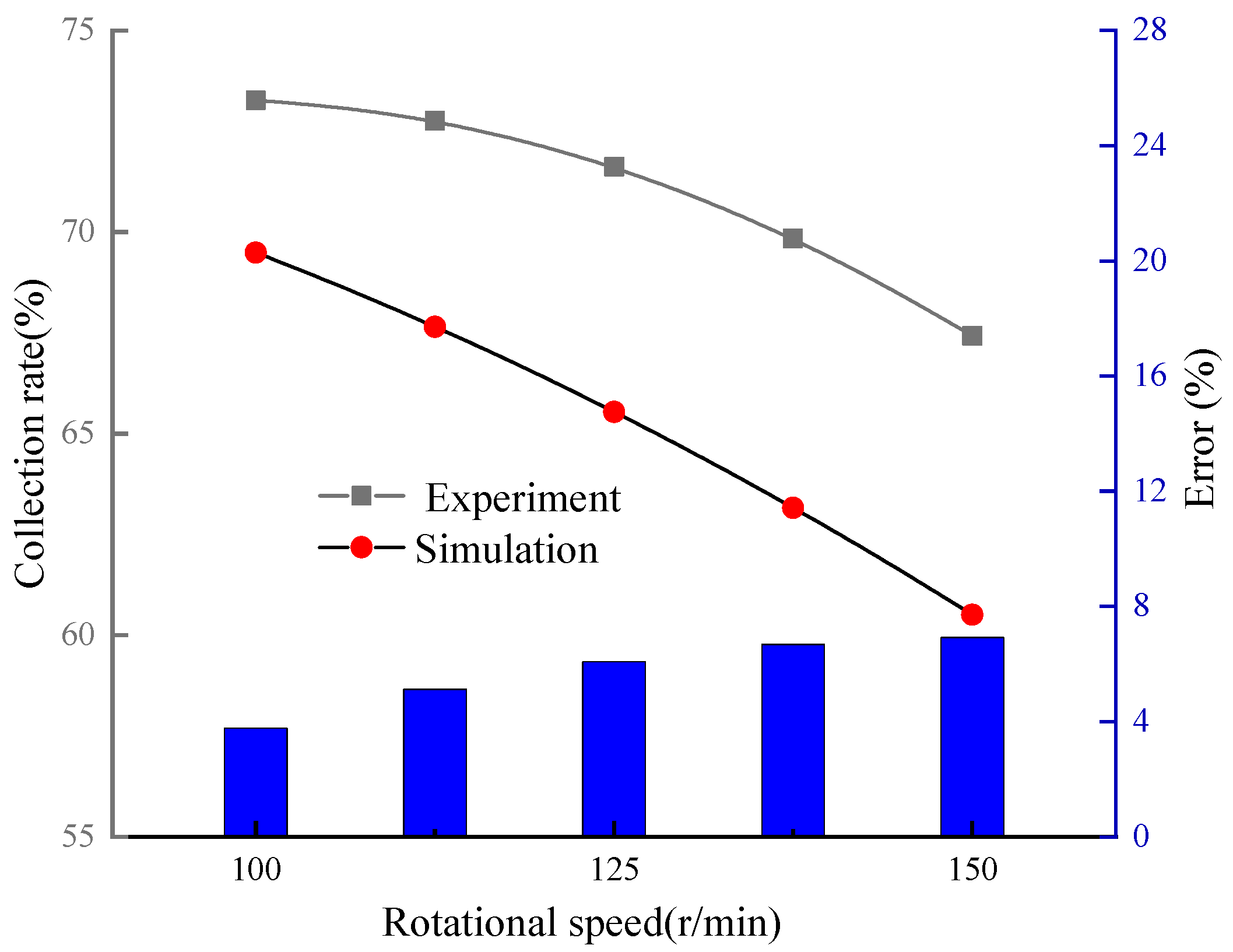
3.4. Influence of Gear Rotation Speed on Picking Rate
3.5. Orthogonal Test Verification
4. Discussion
5. Conclusions
- (1)
- The numerical and experimental results show that the size of jujube branches not only affected the entire field function, but also influenced the weight function, which was an important factor affecting the picking rate of jujube branches. The influence curve of jujube branch size on the picking rate presented a parabolic distribution. When the jujube branch size was 480 mm and 800 mm, the jujube picking rate could reach a peak of 75%.
- (2)
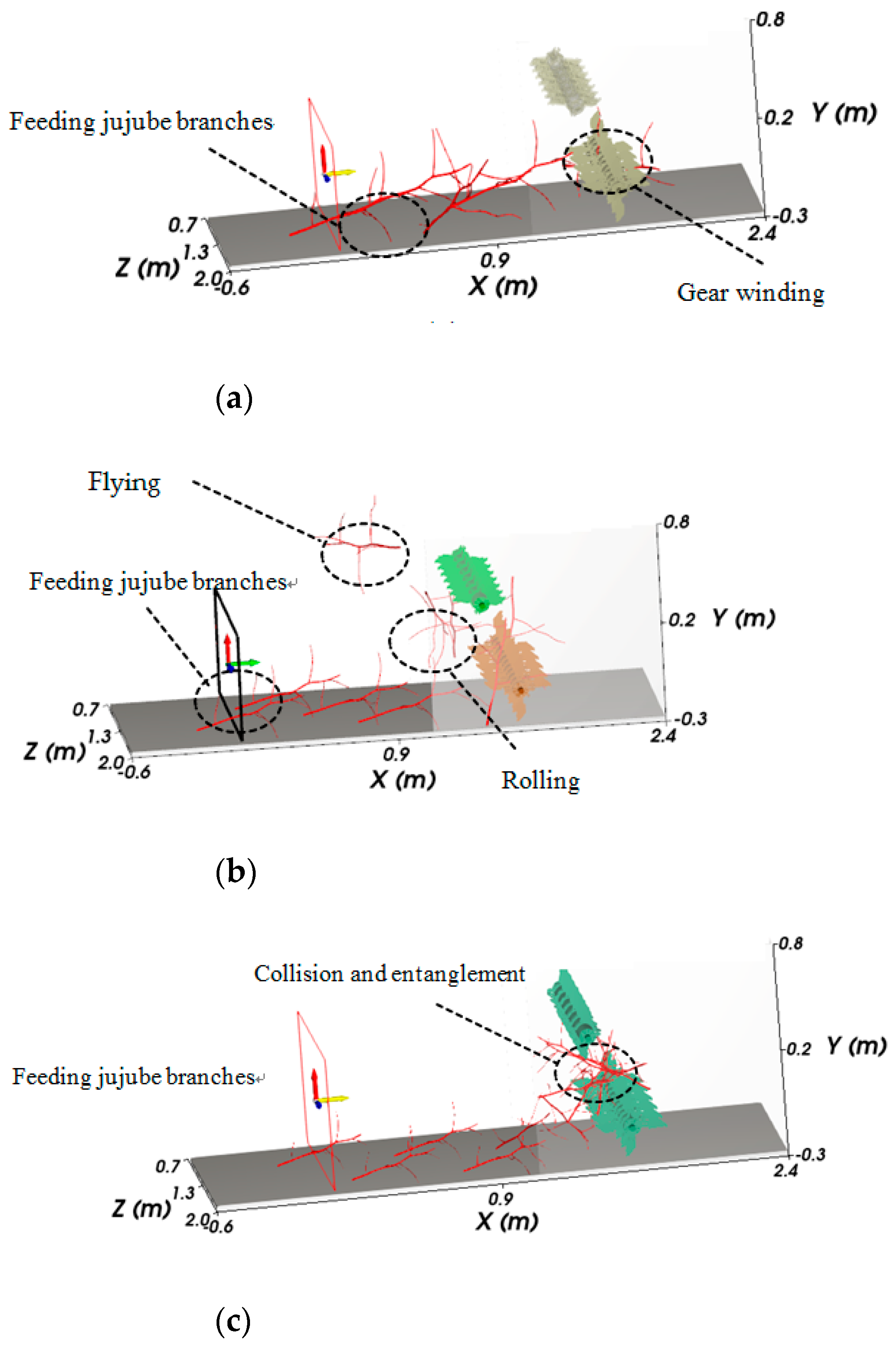
- The total feeding number and the rotation speed of the gear also have an effect on the picking rate of jujube branches. These two factors will affect the force between the particles, the particles and the wall, and the force of the particles in the field function, causing the jujube branches to roll, collide, entangle, and flutter.
- (3)
- With the increase in the number of particles, the picking rate presented a parabolic distribution, with the minimum trough values being 65.5 and 71.1% and the maximum peak values being 69.9% and 83.2%, respectively. The rotation speed of the gear is in a negative correlation with the picking rate, which means the smaller the speed is, the higher the collection rate of jujube branches will be, with the value and the maximum picking rate in the experiment being 69.5% and 73.2%, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ma, Z.; Li, Y.; Xu, L.; Chen, J.; Zhao, Z.; Tang, Z. Dispersion and migration of agricultural particles in a variable-amplitude screen box based on the discrete element method. Comput. Electron. Agric. 2017, 142, 173–180. [Google Scholar] [CrossRef]
- Jebahi, M.; Dau, F.; Charles, J. Multiscale Modeling of Complex Dynamic Problems: An Overview and Recent Developments. Arch. Comput. Methods Eng. 2016, 23, 101–138. [Google Scholar] [CrossRef]
- Tchen, C. Mean Value and Correlation Problem Connected with the Motion of Small Particles Suspended in a Turbulent Fluid. Ph.D. Dissertation, Delft Univerity, Martinus Nijhoff, Hague, The Netherlands, 1947. [Google Scholar]
- Kafashan, J.; Wiącek, J.; Abd Rahman, N.; Gan, J. Two-dimensional particle shapes modelling for DEM simulations in engineering: A review. Granul. Matter 2019, 21. [Google Scholar] [CrossRef]
- Ito, S.; Nagatani, T.; Saegusa, T. Volatile jam and flow fluctuation in counter flow of slender particles. Physica A 2007, 373, 672–682. [Google Scholar]
- Dosta, M.; Antonyuk, S.; Broeckel, U. DEM simulations of amorphous irregular shaped micrometer-sized titania agglomerates at compression. Adv. Powder Technol. 2015, 26, 767–777. [Google Scholar]
- Fanyi, L. Discrete Element Modelling of the Wheat Parpticles and Short Straw in Cleaning Devices. PhD Thesis; Northwest A and F University: Shanxi, China, 2018. [Google Scholar]
- Xin, J.M.; Chen, T.Y.; Meng, J.; Wu, L.Y.; Jiao, J.K.; Zhang, Q.; Liu, C.H.; Song, Y.Q.; Ren, W.T. Design and numerical simulation of two-stage device for dust removal from flue gas of straw carboniz. J. Huazhong Agric. Univ. 2018, 37, 100–107. [Google Scholar]
- Jiang, E.; Sun, Z.; Pan, Z.; Wang, L. Numerical simulation based on CFD-DEM and experiment of grain moving laws in inertia separation chamber. Trans. Chin. Soc. Agric. Mach. 2014, 45, 117–122. [Google Scholar]
- Cai, J.; Zhao, X.B.; Geng, F. Numerical study on the fluidization characteristics of slender particles with gas/solid two-way coupling. Acta Energ. Sol. Sin. 2018, 21, 3169–3177. [Google Scholar]
- Guoxiang, S.; Yongbo, L.; Xiaochan, W.; Yu, J. CFD simulation and experiment of distribution characteristics for droplet of knapsack sprayer. Trans. Chin. Soc. Agric. Eng. 2012, 28, 73–79. [Google Scholar]
- Han, D.; Zhang, D.; Yang, L.; Li, K.; Zhang, T.; Wang, Y.; Cui, T. EDEM-CFD simulation and experiment of working performance of inside-filling air-blowing seed metering device in maize. Trans. Chin. Soc. Agric. Eng. 2017, 33, 23–31. [Google Scholar]
- Du, J.; Hu, G.M.; Fang, Z.Q. Accelerating CFD-DEM simulation of dilute pneumatic conveying with bends. Int. J. Fluid Mach. Syst. 2015, 8, 84–93. [Google Scholar] [CrossRef]
- Hua, L.; Meina, Z.; Wenqing, Y. Optimization of airflow field on air-and-screen cleaning device based on CFD. Trans. Chin. Soc. Agric. Mach. 2013, 44, 12–16. [Google Scholar]
- Tsuji, Y.; Kawaguchi, T.; Tanaka, T. Discrete particle simulation of two-dimensional fluidized bed. Powder Technol. 1993, 77, 79–87. [Google Scholar] [CrossRef]
- Han, H.F. Numerical Study on Gas-Solid Two-Phase Flow Based on the Lattice Boltzmann Method: Direct Numerical Simulation and Efficient Implementation. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2013. [Google Scholar]
- Chen, L.; Mo, C.; Wang, L.; Cui, H. Direct numerical simulation of the self-propelled Janus particle: Use of grid-refined fluctuating lattice Boltzmann method. Microfluid. Nanofluidics 2019, 23, 73.1–73.16. [Google Scholar]
- Wang, Z.L. Fully Resolved Direct Numerical Simulation Technique and Its Application in Multiphase Flows. Ph.D. Thesis, Zhejiang University, Zhejiang, China, 2010. [Google Scholar]
- Thomas, S. Meshless methods: An overview and recent developments. Comput. Methods Appl. Mech. Eng. 2005, 139, 3–47. [Google Scholar]
- Zhang, X. Application of Meshless Local Petrov-Galerkin Method in Large Deformation Problems. Ph.D. Thesis, Tsinghua University, Beijing, China, 2006. [Google Scholar]
- Zeng, H.Q. Parallel algorithms and parallel implementation of meshless numerical simulation. Ph.D. Thesis, University of Science and Technology of China, Hefei, China, 2006. [Google Scholar]
- Pan, X.F.; Zhang, X.; Lu M, W. Meshless Galerkin least-squares method. Comput. Mech. 2005, 35, 182–189. [Google Scholar]
- Keck, R.; Hietel, D. A projection technique for incompressible flow in the meshless finite volume particle method. Adv. Comput. Math. 2005, 23, 143–169. [Google Scholar]
- Zhang, Q.; Banerjee, U. Numerical integration in Galerkin meshless methods, applied to elliptic Neumann problem with non-constant coefficients. Adv. Comput. Math. 2012, 37, 453–492. [Google Scholar] [CrossRef]
- Xu, Z.; Chun, F.Z.; Wan, M.Z.; Yang, F. Discrete element simulation and its validation on vibration and deformation of railway ballast. Yantu Lixue/Rock Soil Mech. 2017, 38, 1481–1488. [Google Scholar]
- Xinjie, N.; Chengqian, J.; Xiang, Y. Research status and development trend of air and screen cleaning device for cereal combine harvesters. J. Chin. Agric. Mechmination 2018, 39, 9–14. [Google Scholar]
- Zhang, F.Q. The Application of Smoothed Particle Hydrodynamics Method in Structure Analysis. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2007. [Google Scholar]
- de Almeida, E.; Spogis, N.; Taranto, O.P.; Silva, M.A. Theoretical study of pneumatic separation of sugarcane bagasse particles. Biomass Bioenergy 2019, 127, 105256. [Google Scholar]
- Almeida, E. Exploratory Study of Rocky/Fluent Software Coupling-Case: Pneumatic Separation of Sugarcane Bagasse Particles. Ph.D. Thesis, University of Campinas, Campinas, Brazil, 2018. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Jujube Branch Size | Size in X Dimension (mm) | Size in Y Dimension (mm) | Size in Z Dimension (mm) | Surface Area (m2) | Volume (10−5 m3) | Weight (kg) | Maximum Screening Size (mm) |
|---|---|---|---|---|---|---|---|
| Size Ⅰ | 640 | 370 | 550 | 0.038 | 6.79 | 0.095 | 459 |
| Size Ⅱ | 800 | 463 | 688 | 0.059 | 13.26 | 0.185 | 573 |
| Size Ⅲ | 480 | 278 | 412 | 0.021 | 2.86 | 0.040 | 344 |
| Parameters | Values |
|---|---|
| Translation speed of conveyor belt (m/s) | 0.42 |
| Rotating speed of upper and lower gears (r/min) | 100, 120 or 150 |
| Total number of particles | 16, 23 or 30 |
| Particle shape | Ⅰ, Ⅱ or Ⅲ |
| Grain density of jujube branch (kg·m−3) | 837 |
| Poisson’s ratio of particles | 0.5 |
| Shear modulus of particles (Pa) | 1.0 × 109 |
| Coefficient of restitution between particles | 0.5 |
| Coefficient of static friction between particles | 0.45 |
| Coefficient of dynamic friction between particles | 0.08 |
| Density of the gear mechanism (steel, kg·m−3) | 7800 |
| Poisson’s ratio of gear mechanism | 0.3 |
| Shear modulus of gear mechanism (Pa) | 7 × 1010 |
| Coefficient of static friction between particles and gear shifting mechanism | 0.35 |
| Coefficient of dynamic friction between particles and gear shifting mechanism | 0.04 |
| Restitution coefficient of particles and gear shifting mechanism | 0.5 |
| Conveying device (rubber, kg·m−3) | 1400 |
| Poisson’s ratio of conveying device | 0.3 |
| Shear modulus of conveying device (Pa) | 1 × 1011 |
| Coefficient of static friction between particles and conveying device | 0.9 |
| Coefficient of dynamic friction between particles and conveying device | 0.1 |
| Restitution coefficient of particles and conveying device | 0.5 |
| Calculation of total time (s) | 20 |
| Time step (s) | 0.05 |
| Factors | A Total Number of Feeding (Branch) | B Size of Jujube Branch (mm) | C Rotation Speed of the Gear (r/min) | |
|---|---|---|---|---|
| Level | ||||
| 1 | 16 | 640 | 150 | |
| 2 | 23 | 800 | 100 | |
| 3 | 30 | 480 | 120 | |
| Test Number | Factors | Test Results | Numerical Results | ||||
|---|---|---|---|---|---|---|---|
| A Total Number of Feeding (branch) | B Size of Jujube Branch (mm) | Test Error | C Rotation Speed of the Gear (r/min) | Picking Rate (%) | |||
| 1 | 1 | 1 | 1 | 1 | 75 | 62.5 | |
| 2 | 1 | 2 | 2 | 2 | 81.3 | 75 | |
| 3 | 1 | 3 | 3 | 3 | 81.3 | 75 | |
| 4 | 2 | 1 | 2 | 3 | 65.2 | 56.6 | |
| 5 | 2 | 2 | 3 | 1 | 82.6 | 73.9 | |
| 6 | 2 | 3 | 1 | 2 | 82.6 | 73.9 | |
| 7 | 3 | 1 | 3 | 2 | 60 | 56.7 | |
| 8 | 3 | 2 | 1 | 3 | 76.7 | 70 | |
| 9 | 3 | 3 | 2 | 1 | 86.7 | 73.3 | |
| Test analysis | k1 | 237.6 | 200.2 | 234.3 | 244.3 | ||
| k3 | 230.4 | 240.6 | 233.2 | 223.9 | |||
| k2 | 223.4 | 250.6 | 223.9 | 223.2 | |||
| R | 14.2 | 50.4 | 10.4 | 21.1 | |||
| Optimal order of factors | B > C > A | ||||||
| B3C1A1 | |||||||
| Numerical analysis | k1 | 212.5 | 175.8 | 206.4 | 209.7 | ||
| k3 | 204.4 | 218.9 | 204.9 | 205.6 | |||
| k2 | 200 | 222.2 | 205.6 | 201.6 | |||
| R | 12.5 | 46.4 | 1.5 | 8.1 | |||
| Optimal order of factors | B > A > C | ||||||
| B3C1A1 | |||||||
| Factors | Height of Gear (cm) | Gear Pitch (cm) | Rotation Speed (r/min) | Number of Feeding | Pick Up a Number | Picking Rate |
|---|---|---|---|---|---|---|
| Gear1 | 13.5 | 10 | 150 | 24 | 17 | 70.8% |
| Gear2 | 13.5 | 10 | 150 | 24 | 15 | 62.5% |
| Gear3 | 13.5 | 10 | 150 | 24 | 20 | 83.3% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Wang, G.; Wang, W.; Ren, D.; Gong, Y.; Yue, X.; Hou, J.; Yang, M. Numerical Simulation of the Picking Process of Supernormal Jujube Branches. Agriculture 2023, 13, 408. https://doi.org/10.3390/agriculture13020408
Zhang R, Wang G, Wang W, Ren D, Gong Y, Yue X, Hou J, Yang M. Numerical Simulation of the Picking Process of Supernormal Jujube Branches. Agriculture. 2023; 13(2):408. https://doi.org/10.3390/agriculture13020408
Chicago/Turabian StyleZhang, Ren, Guofeng Wang, Wei Wang, Dezhi Ren, Yuanjuan Gong, Xiang Yue, Junming Hou, and Mengmeng Yang. 2023. "Numerical Simulation of the Picking Process of Supernormal Jujube Branches" Agriculture 13, no. 2: 408. https://doi.org/10.3390/agriculture13020408