

Research on Flexible End-Effectors with Humanoid Grasp Function for Small Spherical Fruit Picking
 ,
,  ,
,
Abstract
:1. Introduction
2. Design of End-Effector System
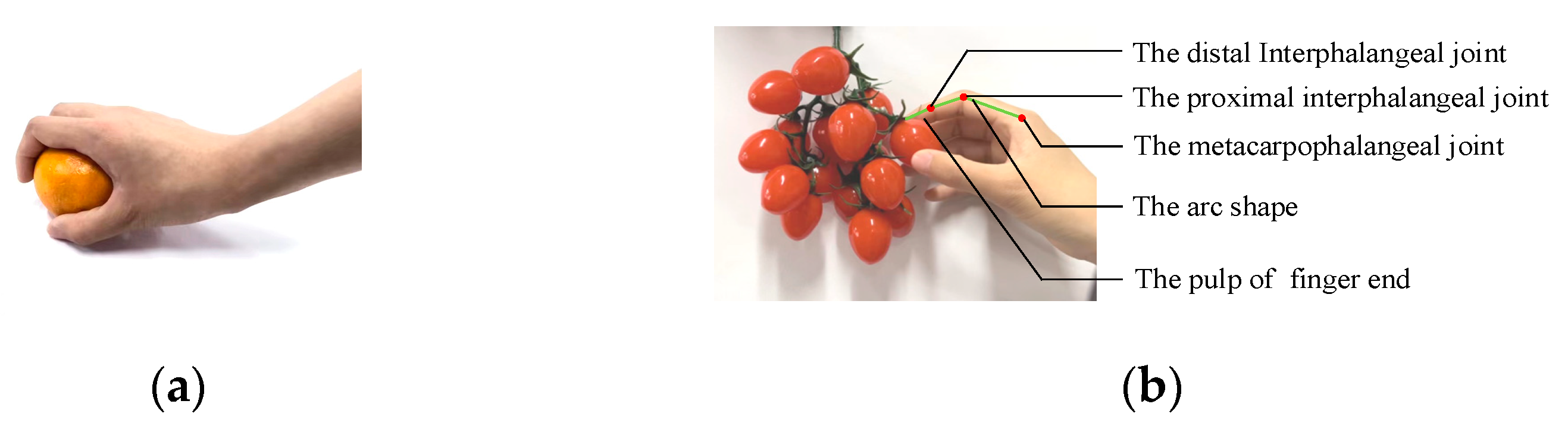
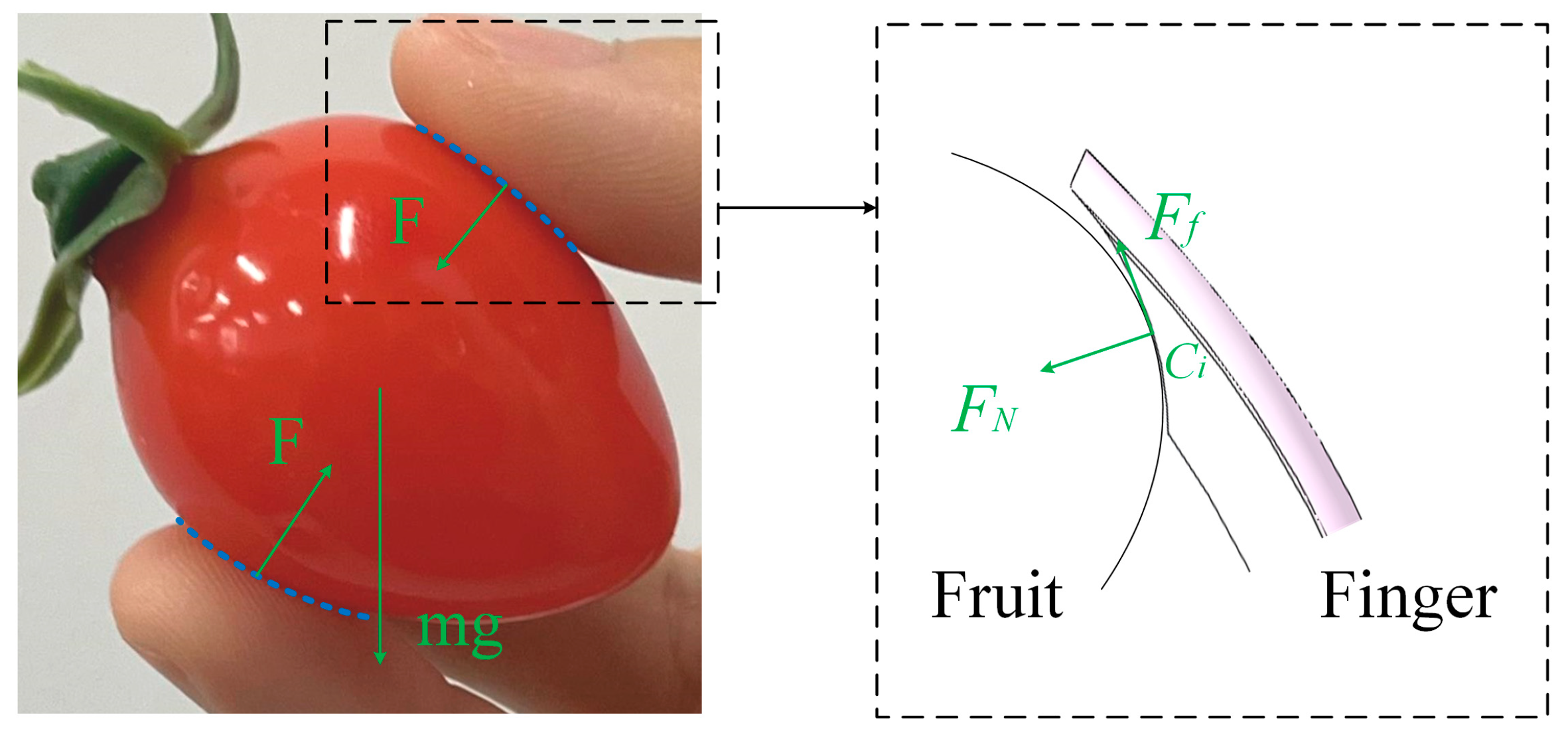
2.1. Design of the Gripper Inspired by Human Hand Grasping
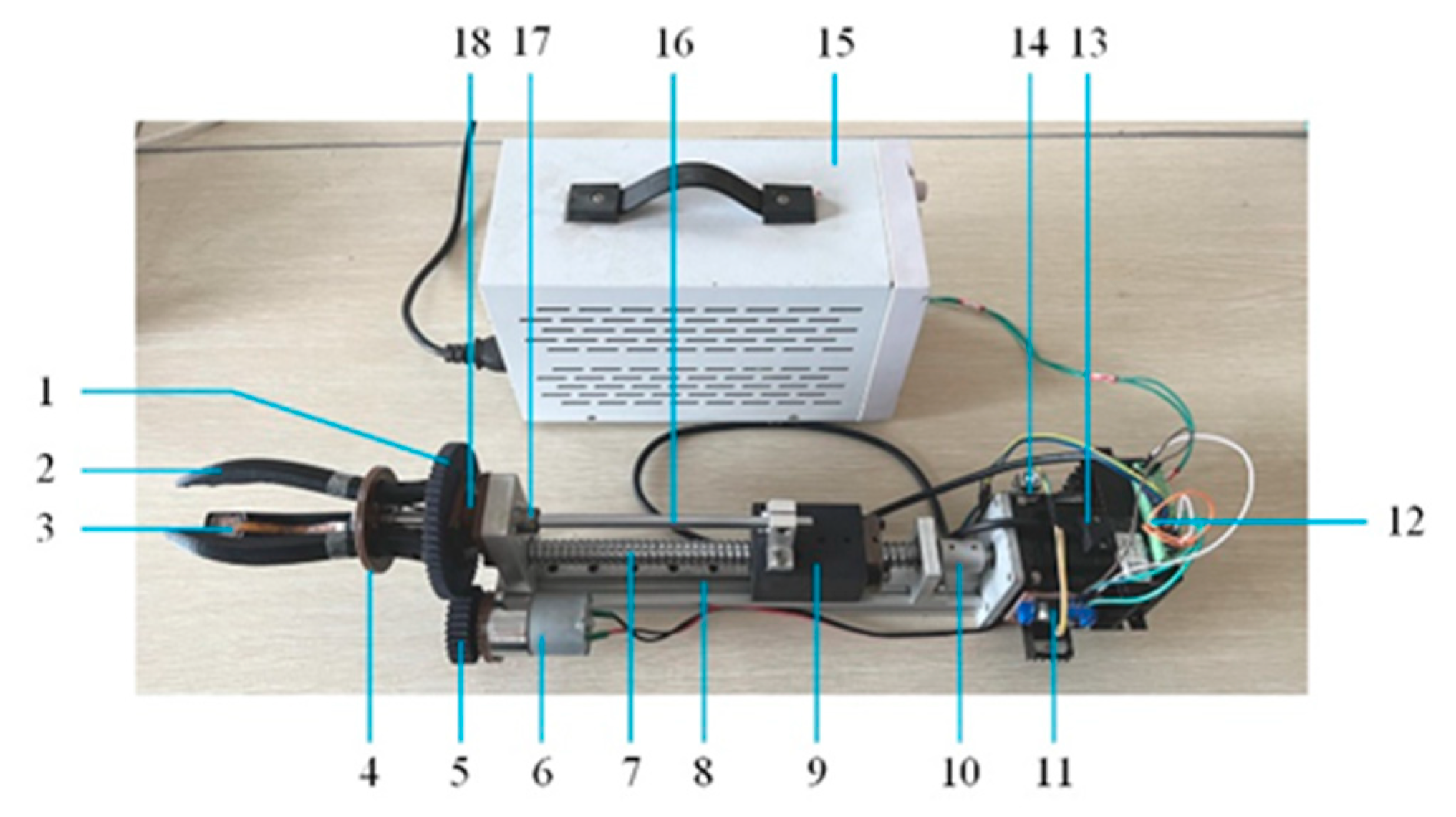
2.2. Design and Working Principle of End-Effector
3. Simulation and Analysis of End-Effector Motion
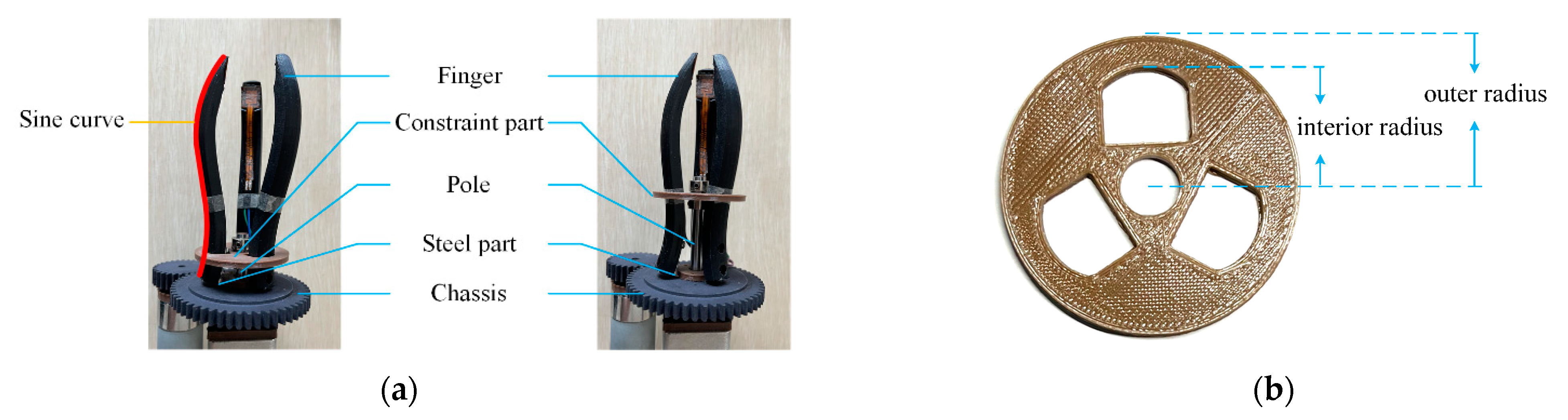
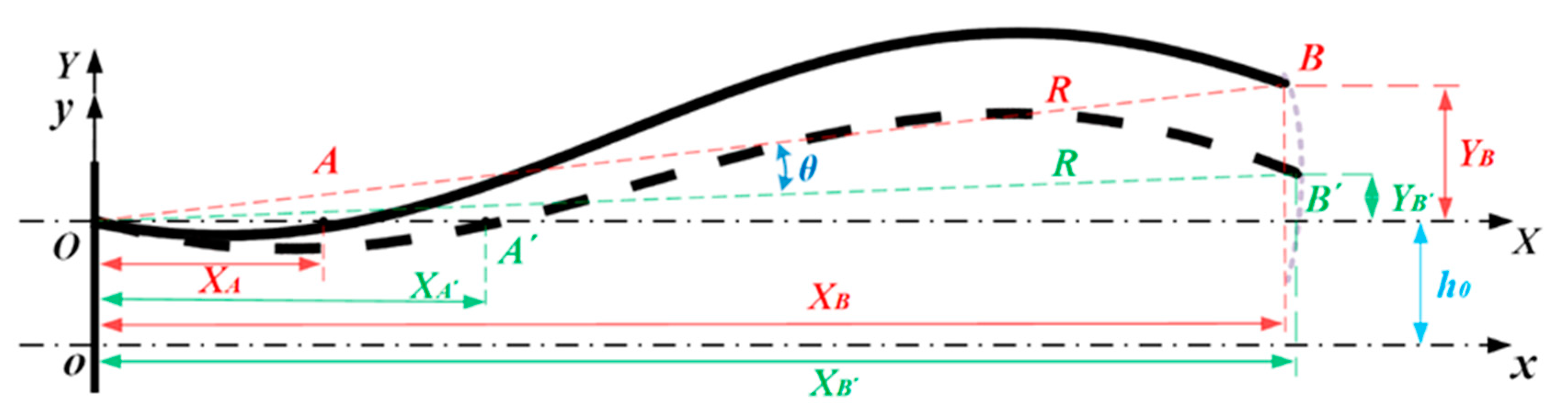
3.1. Establishment of the Single-Finger Kinematics Model and Setting of Key Component Parameters
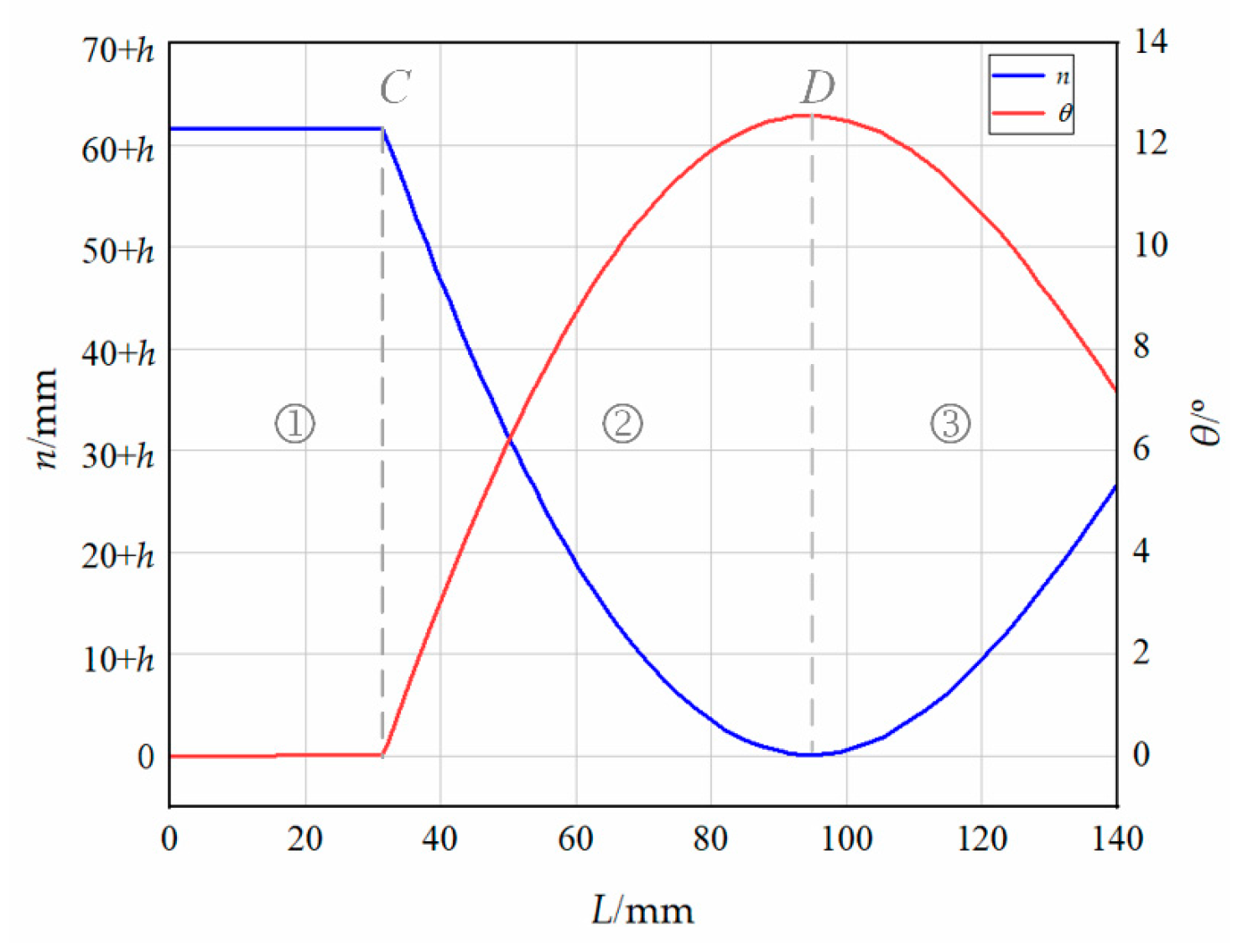
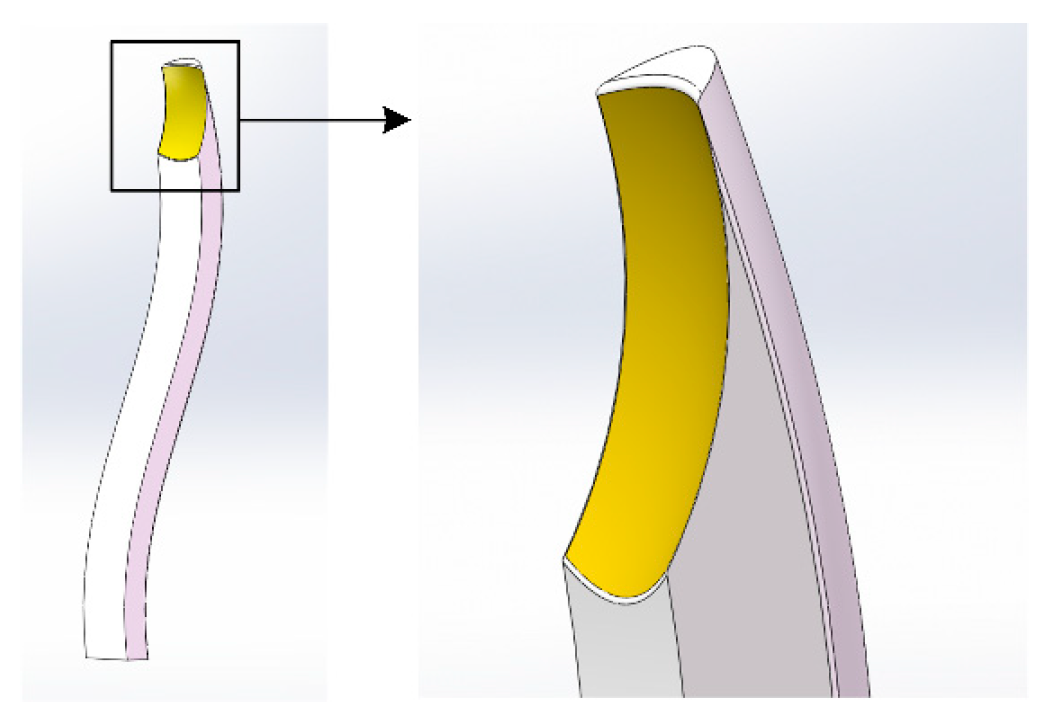
3.2. Design and Analysis of Finger End
3.2.1. Design of the Finger End
3.2.2. Feasibility Analysis of Grasping
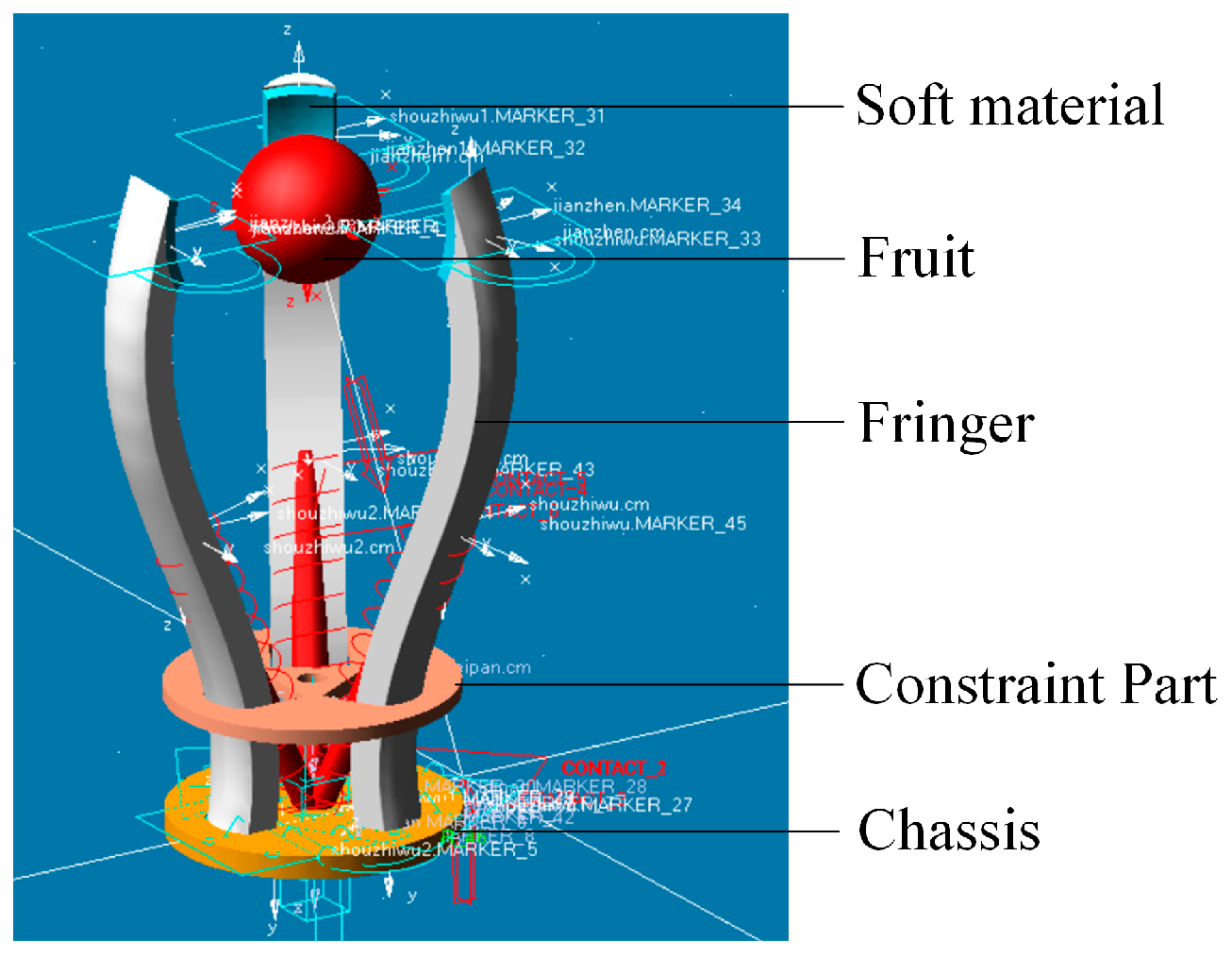
3.3. Simulation and Analysis of the Gripper
4. Control Method of Undamaged Picking
4.1. Experiment and Analysis of Clamping Fruit
4.2. Design of Algorithm for Undamaged Harvesting
5. Experiment and Analysis of Picking
5.1. Material and Method
5.2. Analysis of Picking Results
6. Conclusions
- (1)
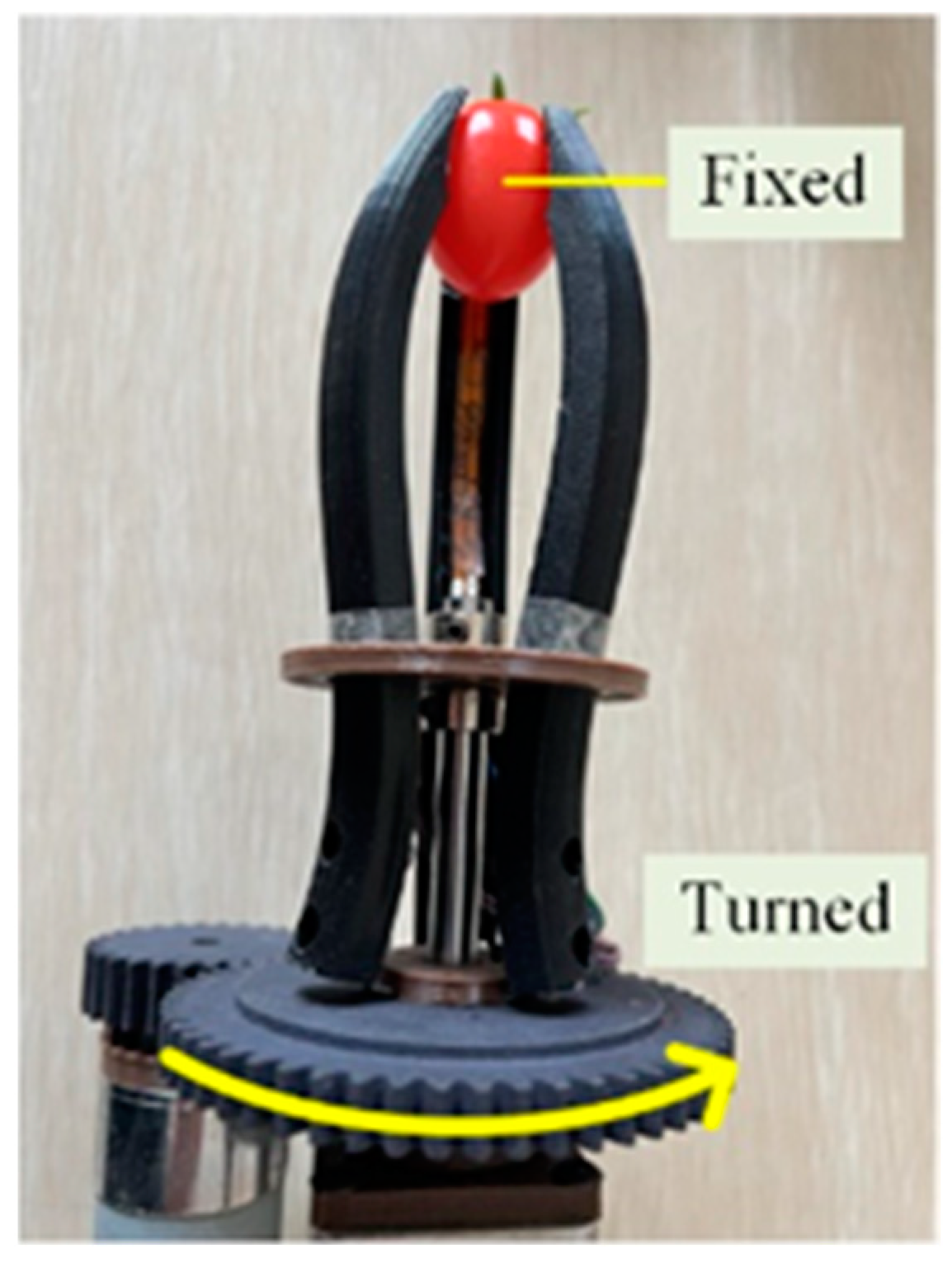
- The two-stage “Holding-Rotating” picking strategy of the finger ends grasping was determined. The end-effector was designed to separate the fruit from the stalk based on the linear motion of the constraint part and the rotating gripper.
- (2)
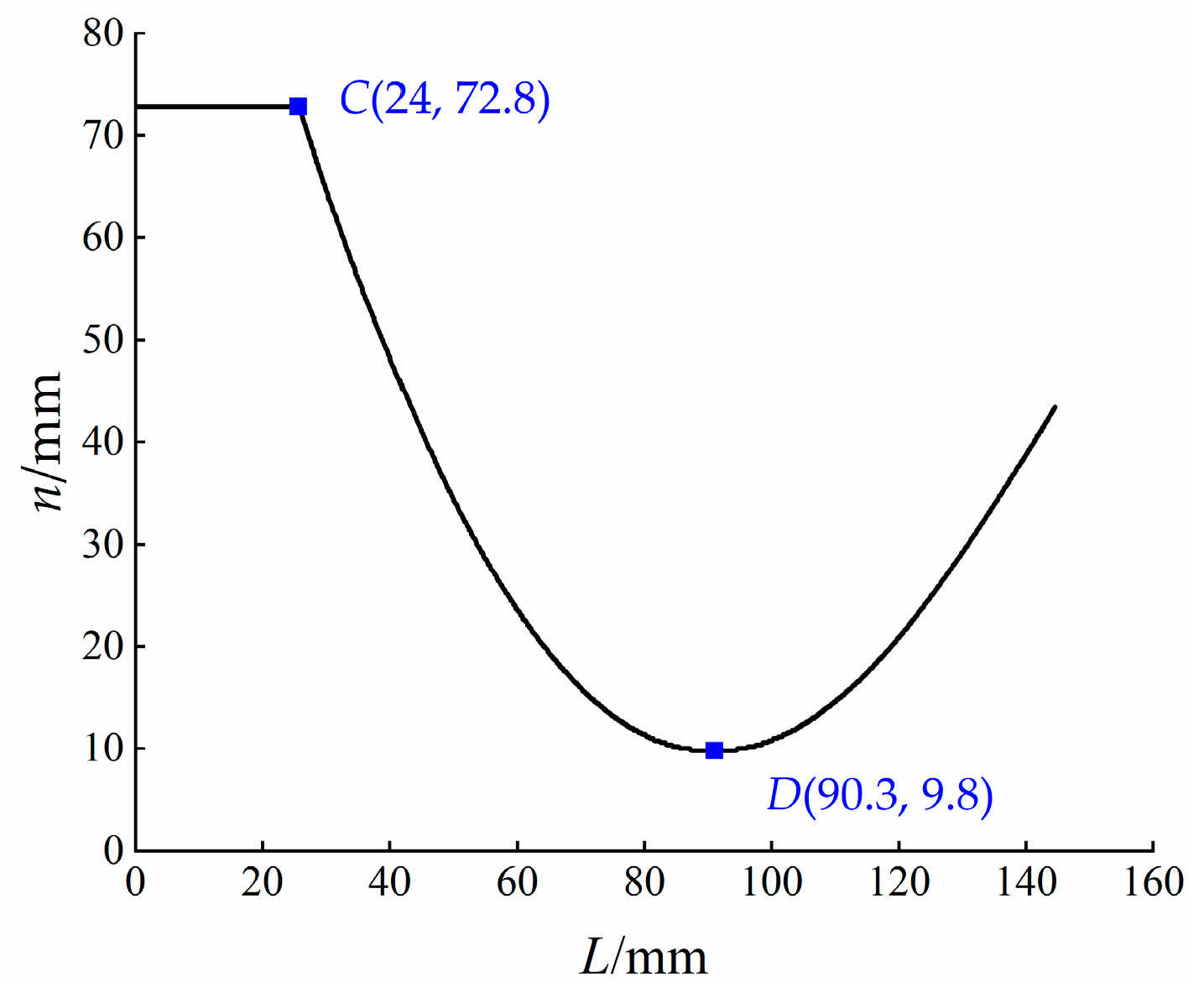
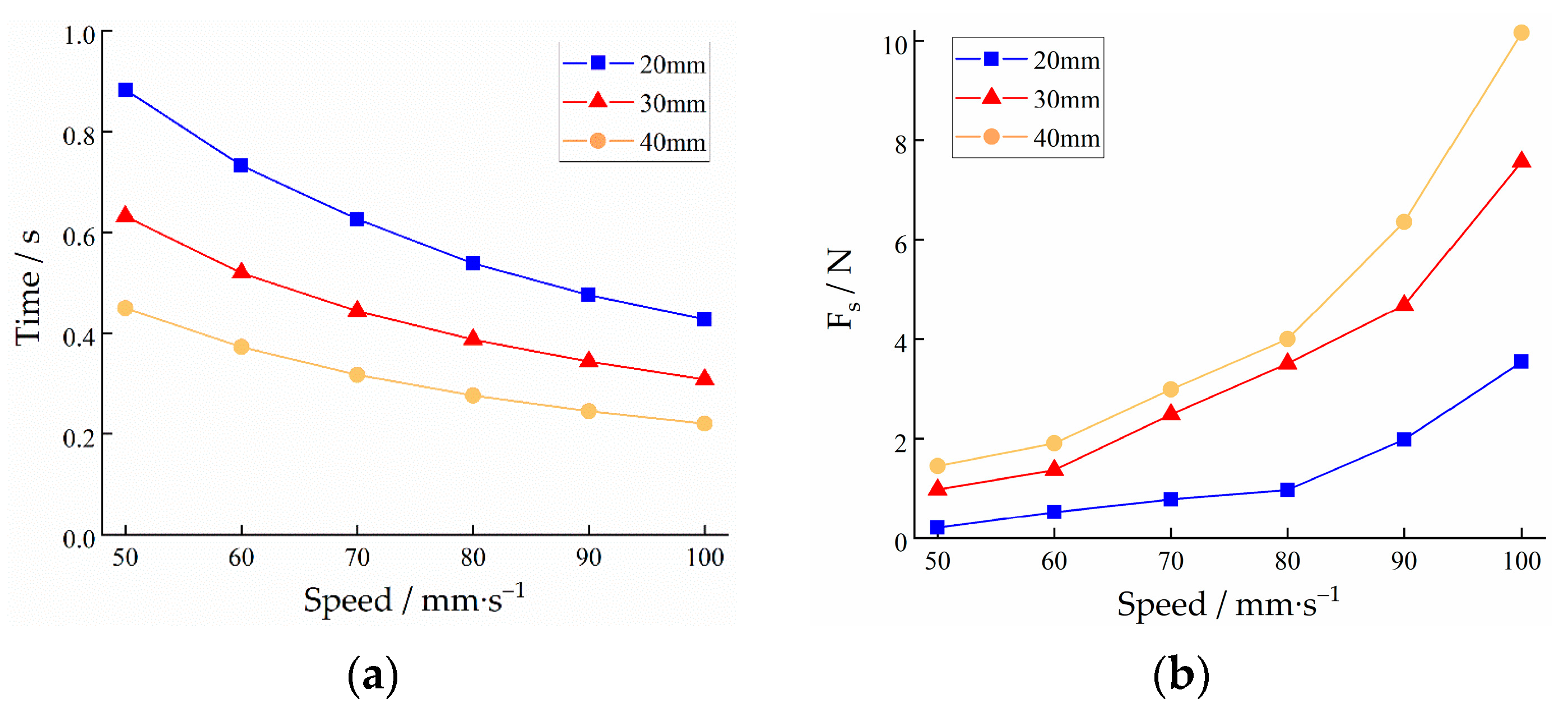
- The mathematical model of the gripper single finger was established, and the gripper structural parameters were determined to meet the requirements of the grabbing range from 0~61.6 mm. 80 mm/s was set by the constraint part through the simulation test for achieving undamaged and fast requirements.
- (3)
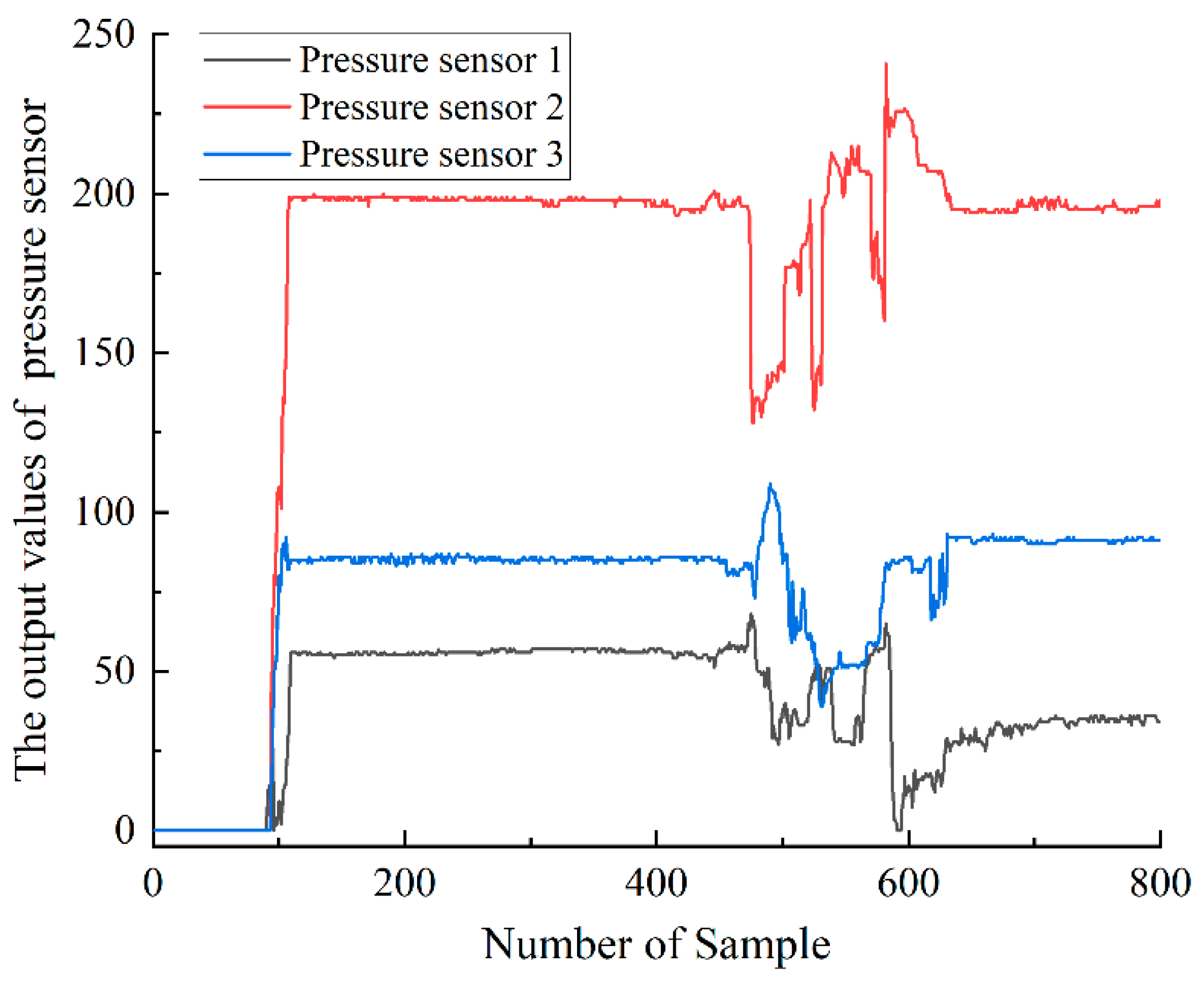
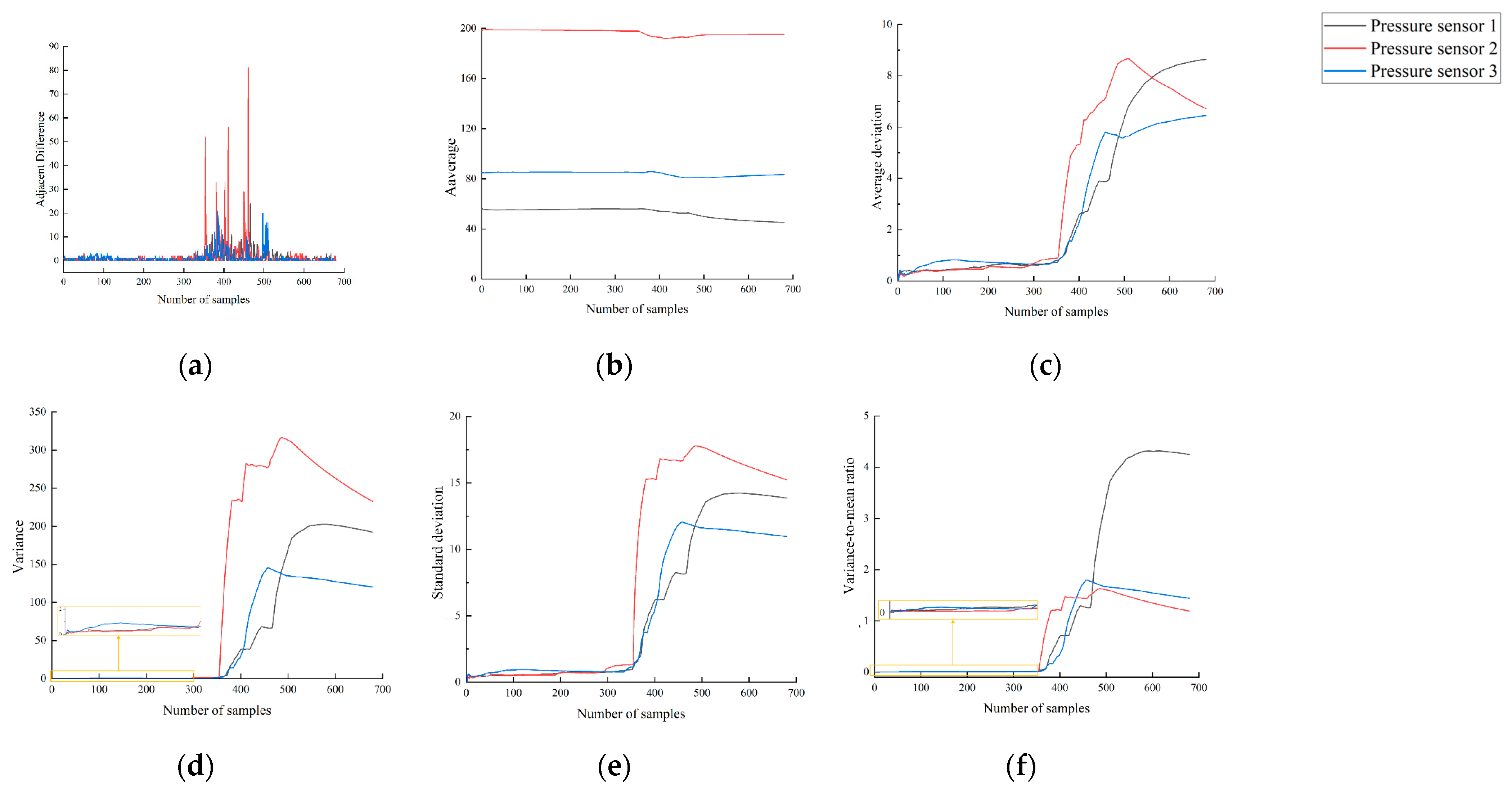
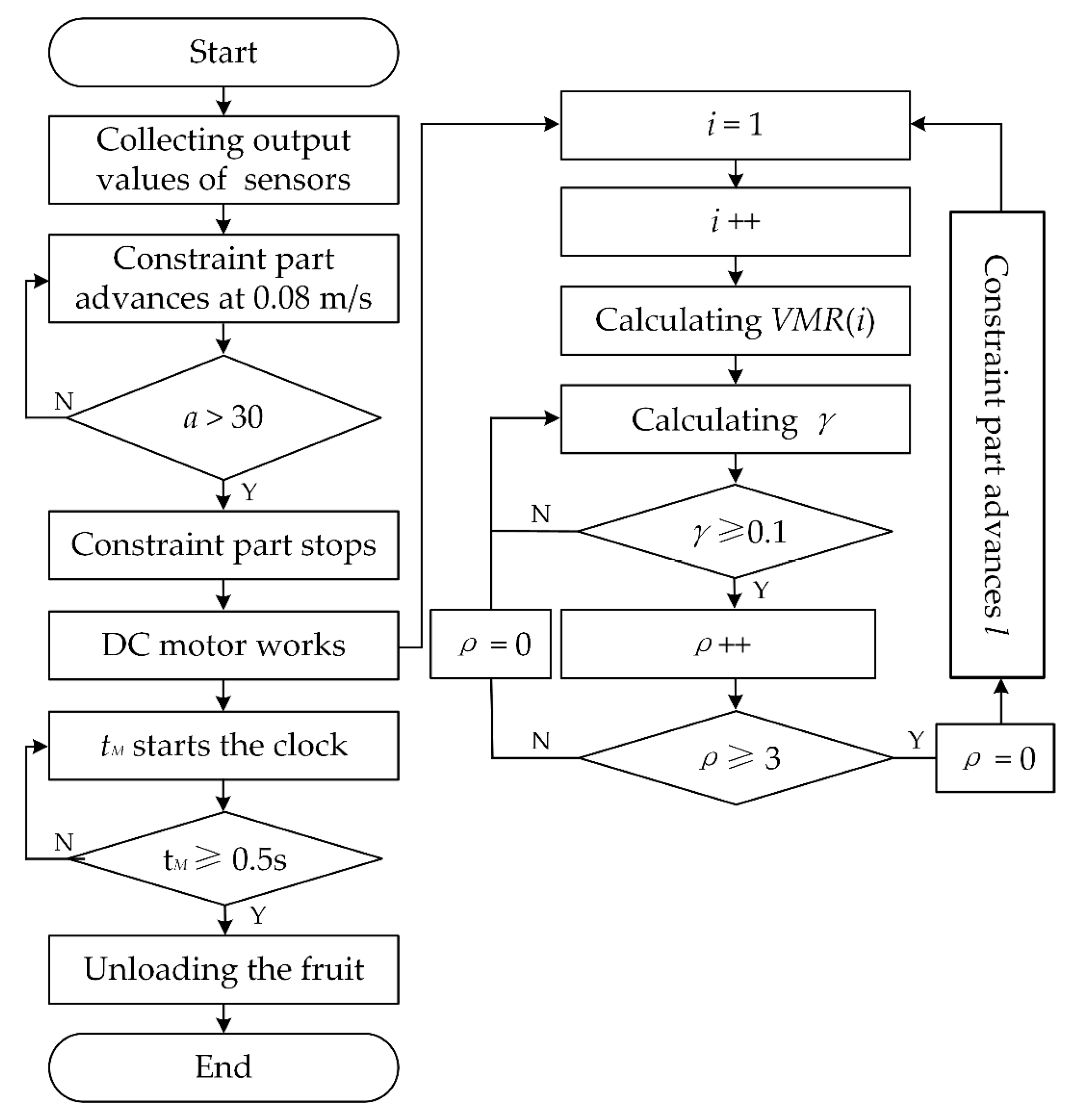
- The statistical principle was used to analyze the sensor’s output to study the rule of stable grasping and slip through the two-stage picking test. The criterion of two-index stability and non-loss is proposed, which includes the grasping index of a fixed value and the slip detection of dynamic variance-to-mean ratio. Therefore, the control strategy and algorithm based on two-stage and two-index for rapid, stable, and non-destructive harvesting of small fruit were proposed. Seventy-two cherry tomatoes were picked. The results of the picking experiment for 72 cherry tomatoes showed that the picking success rate was 95.82%, the average picking time was 4.86 s, the picking damage rate was 2.90%, the browning rate was 2.90% in 72 h, and the wrinkling rate was 1.49% in 72 h.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Simiele, M.; Argentino, O.; Baronti, S.; Scippa, G.S.; Chiatante, D.; Terzaghi, M.; Montagnoli, A. Biochar Enhances Plant Growth, Fruit Yield, and Antioxidant Content of Cherry Tomato (Solanum lycopersicum L.) in a Soilless Substrate. Agriculture 2022, 12, 1135. [Google Scholar] [CrossRef]
- Lipan, L.; Issa-Issa, H.; Moriana, A.; Zurita, N.M.; Galindo, A.; Martín-Palomo, M.J.; Andreu, L.; Carbonell-Barrachina, Á.A.; Hernández, F.; Corell, M. Scheduling Regulated Deficit Irrigation with Leaf Water Potential of Cherry Tomato in Greenhouse and Its Effect on Fruit Quality. Agriculture 2021, 11, 669. [Google Scholar] [CrossRef]
- Distefano, M.; Steingass, C.B.; Leonardi, C.; Giuffrida, F.; Schweiggert, R.; Mauro, R.P. Effects of a Plant-Derived Biostimulant Application on Quality and Functional Traits of Greenhouse Cherry Tomato Cultivars. Food Res. Int. 2022, 157, 111218. [Google Scholar] [CrossRef] [PubMed]
- Xiao, X.; Wang, Y.N.; Jiang, Y.M. End-Effectors Developed for Citrus and Other Spherical Crops. Appl. Sci. 2022, 12, 7945. [Google Scholar] [CrossRef]
- Shi, G.K.; Li, J.B.; Kan, Z.; Ding, L.P.; Ding, H.Z.; Zhou, L.; Wang, L.H. Design and Parameters Optimization of a Provoke-Suction Type Harvester for Ground Jujube Fruit. Agriculture 2022, 12, 409. [Google Scholar] [CrossRef]
- Guo, T.Z.; Zheng, Y.F.; Bo, W.X.; Liu, J.; Pi, J.; Chen, W.; Deng, J.Z. Research on the Bionic Flexible End-Effector Based on Tomato Harvesting. J. Sens. 2022, 2022, 2564952. [Google Scholar] [CrossRef]
- Kim, J.Y.; Pyo, H.R.; Jang, I.; Kang, J.; Ju, B.K.; Ko, K.E. Tomato Harvesting Robotic System Based on Deep-Tomatos: Deep Learning Network Using Transformation Loss for 6D Pose Estimation of Maturity Classified Tomatoes with Side-Stem. Comput. Electron. Agric. 2022, 201, 107300. [Google Scholar] [CrossRef]
- Vrochidou, E.; Tsakalidou, V.N.; Kalathas, I.; Gkrimpizis, T.; Pachidis, T.; Kaburlasos, V.G. An Overview of End Effectors in Agricultural Robotic Harvesting Systems. Agriculture 2022, 12, 1240. [Google Scholar] [CrossRef]
- Ji, W.; Tang, C.C.; Xu, B.; He, G.Z. Contact Force Modeling and Variable Damping Impedance Control of Apple Harvesting Robot. Comput. Electron. Agric. 2022, 198, 107026. [Google Scholar] [CrossRef]
- Xiong, Y.; Ge, Y.Y.; Grimstad, L.; From, P.J. An Autonomous Strawberry-Harvesting Robot: Design, Development, Integration, and Field Evaluation. J. Fileld Robot. 2019, 37, 202–224. [Google Scholar] [CrossRef]
- Huang, M.S.; He, L.; Choi, D.; Pecchia, J.; Li, Y.M. Picking Dynamic Analysis for Robotic Harvesting of Agaricus Bisporus Mushrooms. Comput. Electron. Agric. 2021, 185, 106145. [Google Scholar] [CrossRef]
- Miao, Y.B.; Zheng, J.F. Optimization Design of Compliant Constant-Force Mechanism for Apple Picking Actuator. Comput. Electron. Agric. 2020, 170, 105232. [Google Scholar] [CrossRef]
- Roshanianfard, A.; Noguchi, N. Pumpkin Harvesting Robotic End-Effector. Comput. Electron. Agric. 2020, 174, 105503. [Google Scholar] [CrossRef]
- Cao, X.M.; Zou, X.J.; Jia, C.Y.; Chen, M.Y.; Zeng, Z.Q. RRT-Based Path Planning for an Intelligent Litchi-Picking Manipulator. Comput. Electron. Agric. 2019, 156, 105–118. [Google Scholar] [CrossRef]
- Williams, H.A.; Jones, M.H.; Nejati, M.; Seabright, M.J.; Bell, J.; Penhall, N.D.; Barnett, J.J.; Duke, M.D.; Scarfe, A.J.; Ahn, H.S.; et al. Robotic Kiwifruit Harvesting Using Machine Vision, Convolutional Neural Networks, and Robotic Arms. Biosyst. Eng. 2019, 181, 140–156. [Google Scholar] [CrossRef]
- Wang, R.; Zheng, Z.; Lu, X.; Gao, L.; Jiang, D.; Zhang, Z. Design, Simulation and Test of Roller Comb Type Chrysanthemum (Dendranthema Morifolium Ramat) Picking Machine. Comput. Electron. Agric. 2021, 187, 106295. [Google Scholar] [CrossRef]
- Brondino, L.; Borra, D.; Giuggioli, N.R.; Massaglia, S. Mechanized Blueberry Harvesting: Preliminary Results in the Italian Context. Agriculture 2021, 11, 1197. [Google Scholar] [CrossRef]
- Li, Y.X.; Li, B.J.; Jiang, Y.Y.; Xu, C.R.; Zhou, B.D.; Niu, Q.; Li, C.S. Study on the Dynamic Cutting Mechanism of Green Pepper (Zanthoxylum armatum) Branches under Optimal Tool Parameters. Agriculture 2022, 12, 1165. [Google Scholar] [CrossRef]
- Van Henten, E.J.; Schenk, E.J.; Van Willigenburg, L.G.; Meuleman, J.; Barreiro, P. Collision-Free Inverse Kinematics of the Redundant Seven-Link Manipulator Used in a Cucumber Picking Robot. Biosyst. Eng. 2010, 106, 112–124. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Yang, Y.; Yang, C.H.; Zhao, H.M.; Chen, G.B.; Zhang, Z.; Fu, S.; Zhang, M.; Xu, H.B. End-Effector with a Bite Mode for Harvesting Citrus Fruit in Random Stalk Orientation Environment. Comput. Electron. Agric. 2019, 157, 454–470. [Google Scholar] [CrossRef]
- Wang, J.N.; Li, B.X.; Li, Z.G.; Zubrycki, I.; Granosik, G. Grasping Behavior of the Human Hand during Tomato Picking. Comput. Electron. Agric. 2021, 180, 105901. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, F.; Zhang, J.X.; Yuan, T.; Yin, J.L.; Guo, H.; Yang, C. Development and Evaluation of a Pneumatic Finger-like End-Effector for Cherry Tomato Harvesting Robot in Greenhouse. Comput. Electron. Agric. 2022, 197, 106879. [Google Scholar] [CrossRef]
- Xiang, C.Q.; Yang, H.; Sun, Z.Y.; Xue, B.; Hao, L.N.; Rahoman, M.D.; Davis, S. The Design, Hysteresis Modeling and Control of a Novel SMA-Fishing-Line Actuator. Smart Mater. Struct. 2017, 26, 037004. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, S.; Ounaies, Z. A Study of Metalized Electrode Self-Clearing in Electroactive Polymer (EAP) Based Actuators. In Electroactive Polymer Actuators and Devices; SPIE: Bellingham, WA, USA, 2016. [Google Scholar] [CrossRef]
- Cai, S.B.; Tang, C.E.; Pan, L.F.; Bao, G.J.; Bai, W.Y.; Yang, Q.H. Pneumatic Webbed Soft Gripper for Unstructured Grasping. Int. J. Agric. Biol. Eng. 2021, 14, 145–151. [Google Scholar] [CrossRef]
- Ji, W.; Zhang, J.W.; Xu, B.; Tang, C.C.; Zhao, D.A. Grasping mode analysis and adaptive impedance control for apple harvesting robotic grippers. Comput. Electron. Agric. 2021, 186, 106210. [Google Scholar] [CrossRef]
- Roderick, W.R.; Da Cutkosky, M.R.; Lentink, D. Bird-Inspired Dynamic Grasping and Perching in Arboreal Environments. Sci. Robot. 2021, 6, abj7562. [Google Scholar] [CrossRef]
- Mablekos-Alexiou, A.; Cruz, L.; Bergeles, C. Friction-Inclusive Modeling of Sliding Contact Transmission Systems in Robotics. IEEE Trans. Robot. 2021, 37, 1252–1267. [Google Scholar] [CrossRef]
- Xie, H.B.; Kong, D.Y.; Wang, Q. Optimization and Experimental Study of Bionic Compliant End-Effector for Robotic Cherry Tomato Harvesting. J. Bionic Eng. 2022, 19, 1314–1333. [Google Scholar] [CrossRef]
- James, J.W.; Lepora, N.F. Slip Detection for Grasp Stabilization with a Multifingered Tactile Robot Hand. IEEE Trans. Robot. 2021, 37, 506–519. [Google Scholar] [CrossRef]
- Li, Q.; Kroemer, O.; Su, Z.; Veiga, F.F.; Kaboli, M.; Ritter, H.J. A Review of Tactile Information: Perception and Action through Touch. IEEE Trans. Robot. 2020, 36, 1619–1634. [Google Scholar] [CrossRef]
- Zou, L.L.; Yuan, J.; Liu, X.M.; Li, J.G.; Zhang, P.; Niu, Z.R. Burgers Viscoelastic Model-Based Variable Stiffness Design of Compliant Clamping Mechanism for Leafy Greens Harvesting. Biosyst. Eng. 2021, 208, 1–15. [Google Scholar] [CrossRef]
- Costanzo, M.; De Maria, G.; Natale, C. Two-Fingered in-Hand Object Handling Based on Force/Tactile Feedback. IEEE Trans. Robot. 2020, 36, 157–173. [Google Scholar] [CrossRef]
- Jiang, C.P.; Zhang, Z.; Pan, J.; Wang, Y.C.; Zhang, L.; Tong, L.M. Finger-Skin-Inspired Flexible Optical Sensor for Force Sensing and Slip Detection in Robotic Grasping. Adv. Mater. Technol. 2021, 6, 2100285. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parts | Parameters | Value/mm |
|---|---|---|
| Pole | Length | 120 |
| Fingers | Length | 140 |
| Thickness | 5 | |
| Width | 10 | |
| Chassis | Radius | 50 |
| Constraint part | Interior radius | 21 |
| Outer radius | 25 | |
| Screw | Length | 150 |
| Pitch | 10 | |
| Steel shrapnel | Width | 10 |
| r/mm | L1/mm | L2/mm | ΔL/mm |
|---|---|---|---|
| 20 | 24 | 66.9 | 42.9 |
| 30 | 54.9 | 30.9 | |
| 40 | 46.2 | 22.2 |
| Speed /mm·s−1 | Time/s | Fs/n | ||||
|---|---|---|---|---|---|---|
| 20 mm | 30 mm | 40 mm | 20 mm | 30 mm | 40 mm | |
| 50 | 0.8826 | 0.6314 | 0.4490 | 0.2074 | 0.9792 | 1.4509 |
| 60 | 0.7320 | 0.5190 | 0.3724 | 0.5230 | 1.3712 | 1.9064 |
| 70 | 0.6256 | 0.4435 | 0.3169 | 0.7816 | 2.4866 | 2.9877 |
| 80 | 0.5381 | 0.3872 | 0.2761 | 0.9717 | 3.5077 | 4.0003 |
| 90 | 0.4755 | 0.3432 | 0.2449 | 1.9838 | 4.6872 | 6.3619 |
| 100 | 0.4271 | 0.3079 | 0.2200 | 3.5447 | 7.5650 | 10.1627 |
| Item | Number | Result/% | |
|---|---|---|---|
| Success | 69 | 95.83 | |
| Damaged | 2 | 2.90 | |
| Browning | 24 h | 0 | 0 |
| 48 h | 1 | 1.49 | |
| 72 h | 2 | 2.90 | |
| Wrinkling | 24 h | 0 | 0 |
| 48 h | 0 | 0 | |
| 72 h | 1 | 1.49 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Chen, Z.; Wang, Y.; Bao, R.; Chen, X.; Fu, S.; Tian, M.; Zhang, Y. Research on Flexible End-Effectors with Humanoid Grasp Function for Small Spherical Fruit Picking. Agriculture 2023, 13, 123. https://doi.org/10.3390/agriculture13010123
Zhang F, Chen Z, Wang Y, Bao R, Chen X, Fu S, Tian M, Zhang Y. Research on Flexible End-Effectors with Humanoid Grasp Function for Small Spherical Fruit Picking. Agriculture. 2023; 13(1):123. https://doi.org/10.3390/agriculture13010123
Chicago/Turabian StyleZhang, Fu, Zijun Chen, Yafei Wang, Ruofei Bao, Xingguang Chen, Sanling Fu, Mimi Tian, and Yakun Zhang. 2023. "Research on Flexible End-Effectors with Humanoid Grasp Function for Small Spherical Fruit Picking" Agriculture 13, no. 1: 123. https://doi.org/10.3390/agriculture13010123