1. Introduction
There is a wide variety of agriculture and forestry machinery. The tractor is one of the most important pieces of agricultural working machinery applied in the fields of agriculture and forestry [
1,
2,
3]. Moreover, the agriculture working machinery also includes the grain harvester combine, the cotton picker, and so on. The forestry working machinery includes the skidder, the forest fire truck, the harvesting–cultivating combination machine, and so on [
4]. The agriculture and forestry machinery generally works in the conditions of severe environments and variable loads [
5,
6,
7,
8]. Running reliably at the required speed is one of the most basic performance requirements of agriculture and forestry machinery. It requires a wider range of speed changes.
For vehicles (mainly fuel engine vehicles [
9,
10] and electric vehicles [
11,
12,
13]), when the engine is determined, the transmission system plays an important role in changing the speed. Agricultural machinery and vehicles have a certain degree of commonality. Tractors are also non-road vehicles. Therefore, the method of analogy can be used to study and analyze the power transmission system. The HMCVT, as a power dividing (composed of the mechanical power and the hydraulic power), continuously variable transmission unit [
14], is applied to agricultural and forestry machinery such as tractors [
15,
16,
17].
The HMCVT receives the power transmitted from the engine and then outputs the power after changing the speed according to the transmission characteristics. Then, the power goes through other transmission systems (with the fixed transmission ratio) and wheels [
18,
19,
20]. Finally, the running speed of the agriculture and forestry machinery is formed. Therefore, to ensure that the agriculture and forestry machinery runs reliably at the required speed, it is necessary to design the speed regulating characteristics properly. However, designing the speed regulating characteristics of a HMCVT properly requires the correct mastery of the speed regulating characteristics. Meanwhile, the proper design of the speed regulating characteristics is the premise of using the continuously transmission unit.
Recently, a few scholars have conducted studies on the analysis and optimization design of the HMCVT’s speed regulating characteristics.
In the studies of the HMCVT’s speed regulating characteristic analysis, most scholars use theoretical analysis based on the mechanical transmission principle to derive the relational expression of the HMCVT’s speed regulating characteristics (i.e., the relational expression between the displacement ratio of the pump–motor system and the HMCVT’s ratio). Xu et al. [
21] gave a relational expression between the HMCVT speed ratio and variable-pump constant-motor displacement ratio based on a theoretical analysis. The research pointed out that the relational model could offer a theoretical basis for the transmission scheme determination, parameter matching and performance analysis of the HMCVT. Later, Xu et al. [
22] pointed out the requirement of the HMCVT’s steady section shift to the working section transmission ratio. Sung et al. [
23] researched the speed regulating characteristics of 12 HMCVTs using the network analysis method. Yu et al. [
24], after obtaining a theoretical analysis model of speed regulating characteristics, analyzed the linearization degree of the speed regulating characteristics and the change range of the HMCVT’s output speed, researched using a prototype test. Li et al. [
25] analyzed the relationship between the transmission ratio and displacement ratio using a theoretical model of output speed built in the environment of Matlab. Meanwhile, the research analyzed the hydraulic–mechanical mixed section and the purely hydraulic section separately and pointed out the continuity of the speed regulating characteristics. Xia and Sun [
26] derived the change relational expression of speed regulating characteristics based on the working principle of continuously variable transmission. Then, on this basis, they analyzed the working advantages of the HMCVT.
In the research field of HMCVT design, most scholars have used the optimization algorithm for the design and matching adjustment of parameters. Volpe et al. [
27] used the difference evolution algorithm, the simulated annealing algorithm, and the simplex method for the optimization design of two types of power-dividing continuously variable transmission. Macor and Rossetti [
28,
29] set parameters, such as the gear ratio and the planetary gear transmission ratio, as the variables of optimization design, and used the PSO algorithm for the multi-object optimization design. Moreover, the research pointed out that the HMCVT’s optimization design is complicated and has strongly nonlinear characteristics. Zhang et al. [
30] used the non-dominated sorting genetic algorithm for the optimization of the planetary row and transmission ratio. Some scholars first determined the form of HMCVT transmission scheme (an equal-ratio or equal-difference transmission scheme), and then determined the values of transmission parameters according to the empirical method and formulas. For instance, Ni et al. [
31] designed a four-stage HMCVT with the common transmission ratios of sections as 1.88, and verified the continuity of output speed. Zhang et al. [
32] and He et al. [
33] designed the HMCVT’s parameters with the equal-ratio and equal-difference principles, respectively. Moreover, Liu et al. [
34] used the theoretical analysis formulas of kinematics and mechanics combined with the Newton–Raphson method for parameter matching. Cheng et al. [
35] performed a mechanism analysis of the HMCVT’s speed regulating characteristics, composed of the multi-planetary-row compound transmission, and designed a non-equal-ratio-transmission HMCVT using the improved genetic algorithm. The research matched the required range of tractor working speed with the change range of each HMCVT section transmission ratio. This helped to improve the flexibility of the HMCVT’s speed regulating characteristics design.
To sum up, using the theoretical relational expression of speed regulating characteristics to design the HMCVT is common. However, the method depends on the precision of the model of the speed regulating characteristics. The HMCVT is composed of the mechanical system (generally composed of the fixed-shaft gear pair and the planetary gear train) and the hydraulic system (generally composed of the pump and the motor). In the process of transmission, it can be considered that the actual transmission characteristics are consistent with the theoretical transmission characteristics of the mechanical system. However, the hydraulic system is greatly affected by the environment, thus causing a certain deviation between the actual and theoretical transmission characteristics. Therefore, only when the transmission characteristics of the mechanical and hydraulic systems are both correct, the HMCVT’s speed regulating characteristics have certain precision. In particular, it is difficult to improve the precision of the HMCVT’s speed regulating characteristics model in the research, development, and design stage. Generally, the comparative verification of the speed regulating characteristics can only be done after the HMCVT is made, thus resulting in increasing research and development costs and duration. In addition, current studies have a serious deficiency in this respect.
To solve the problem described above, the paper proposes a regression-based correction method and an I-PSO-based optimization method for the HMCVT’s speed regulating characteristics. The paper mainly researches the following three aspects. Firstly, the paper describes a test of the speed regulating characteristics of the hydraulic system using the test bench of a variable-pump constant-motor system. Then, based on the measurement results of the test, the paper analyzes the linearization degree of the measured output speed and the deviation degree between the measured and theoretical values. The method of least squares is used for the regression analysis of the speed regulating characteristics of the variable-pump constant-motor system. The regression model is considered as the correction model of the HMCVT hydraulic system’s speed regulating characteristics. Secondly, according to agricultural machinery’s working speed requirement, engine characteristics, and the corrected model of the HMCVT’s speed regulating characteristics, the paper uses the I-PSO algorithm for the optimization design of the speed regulating characteristics and matching of transmission parameters. Thirdly, using the coefficient of determination R2 and the mean absolute percentage error MAPE as evaluation indexes, the paper compares before and after optimization and before and after correction of the speed regulating characteristics. Comparison results show that the corrected model of the speed regulating characteristics of the hydraulic system has high precision; the speed regulating characteristics based on the I-PSO algorithm are highly consistent with the expected characteristics and the matching of the transmission design parameters has a good result. According to the method proposed, it is only necessary to test the output speed of the pump–motor system chosen to complete the optimization design of the speed regulating characteristics and the matching of the transmission parameters of the HMCVT effectively in the research, development, and design stage.
2. Materials and Methods
2.1. Working Principle of Tractor HMCVT Researched
Figure 1 shows the transmission scheme of the tractor HMCVT researched in the paper. The continuously variable transmission unit has eight gear pairs (suppose that their transmission ratios are
i1,
i2,
i3,
i4,
i5,
i6,
i7, and
i8, respectively), two planetary rows P
1 and P
2 (suppose that the parameters of planetary rows are
k1 and
k2, respectively), three wet clutches C
0, C
1, and C
2, and one variable-pump constant-motor system.
When a tractor runs normally and works (corresponding to the HMCVT hydraulic–mechanical-power mixed working mode), the overall power of the transmission system is output from the engine and then input into the variable-pump constant-motor system (the hydraulic power flow) and the planetary gear train (the mechanical power flow). The divided power converges through the planetary gear train and then is output through P
1’s gear ring or P
2’s planetary carrier. When a tractor starts up (corresponding to the purely hydraulic working mode of HMCVT), the overall power of the transmission system is output from the engine and then input into the variable-pump constant-motor system directly, and drives gear pair
i8 directly to offer the power to the output end. The core part of the continuously variable unit (i.e., the power confluence mechanism) of the tractor is the Simpson planetary gear transmission mechanism and has three working sections (including the purely hydraulic working section H
0 and the hydraulic–mechanical mixed working sections HM
1 and HM
2).
Figure 1 also shows the power output routes of working sections, in which sections H
0, HM
1, and HM
2 are shown in blue, green, and red, respectively.
The calculation formulas for the speeds of the confluence mechanism planetary carrier, gear ring, and sun gear are as follows [
36,
37]:
in which
is the output speed of the gear ring;
is the input speed of the planetary carrier, and
is the input speed of the sun gear.
Theoretically, the transmission relationship between the variable pump and constant motor is as follows [
38]:
in which
is the speed of the constant motor;
is the working speed of the variable pump, and
is the displacement ratio of the variable-pump constant-motor system.
Combining Equation (1) with Equation (2), we then obtain the relational expression of the 3-section HMCVT’s speed regulating characteristics (i.e., the relational expression between the displacement ratio of the pump–motor system and the transmission ratio of HMCVT) as follows [
39]:
2.2. Build the ‘Variable-Pump and Constant-Motor’ Test Bench of HMCVT for Tractor
Figure 2 shows the variable-pump constant-motor test bench built for the HMCVT for a tractor.
The test bench uses the speed torque sensors of the ZJ-2000A model and ZJ-5000A model of Lanling Jiangsu, China.
Table 1 gives the ranges of speed and torque.
The test bench uses the variable pump of the Linde HPV-02 model with 55 cm3/rev displacement and 75 kW continuous working power, and the constant motor of the Linde HMF-02 model with 55 cm3/rev displacement and 93 kW continuous working power.
2.3. Test of Speed Regulating Characteristics for ‘Variable-Pump and Constant-Motor’ System
The test aims to measure the speed regulating characteristics of the variable-pump constant-motor system in the real environment, and offers measured data to the studies on the linearization degree of the motor output speed, the deviation degree between the measured value and theoretical value of output speed, and the correction of the speed regulating characteristics based on regression.
The test requires us to fix the variable pump’s input speed and record the constant motor’s output speed by changing displacement ratio .
According to Equation (2), the change range of the absolute value of the displacement ratio is 0~1. Therefore, to cover the change range of displacement ratio completely, the test chooses displacement ratios of 0.2, 0.25, 0.3, 0.375, 0.5, 0.625, 0.75, and 1 (in total, 8 groups of tests), and considers the average of stable constant motor output speeds in each group of tests as the output speed in the current working condition. In addition, the research records the input speed data of the variable pump to analyze and determine whether the volatility of the input speed is reasonable. The analysis aims to alleviate the influence of the input speed volatility on the system’s output speed.
2.4. The Analysis Method for Speed Regulating Characteristics of ‘Variable-Pump and Constant-Motor’ System
The paper calculates and obtains
(the average input speed of variable pump) and
(the standard deviation) to determine whether the volatility of the input speed is reasonable. The calculation formulas of average input speed
and standard deviation
are as follows:
in which
is the total number of measured data and
is the value of the
ith measured datum.
The higher the linearization degree of the HMCVT’s speed regulating characteristics, the better the adjustability of the tractor’s driving speed [
24]. According to the expression of the speed regulating characteristics of the HMCVT used, i.e., Equations (3)–(5), the HMCVT’s output speed and displacement ratio
have a linear variation relationship theoretically. The gear system transmission is reliable, and its theoretical and actual transmission characteristics are basically consistent. Therefore, the linearization degree of the variable-pump constant-motor system’s speed regulating characteristics plays a decisive role in the linearization degree of the HMCVT’s speed regulating characteristics.
The paper proposes to perform linear fitting to the motor output speed based on the least squares method and using
, the coefficient of determination of linear fitting, as the determination basis of the linearization degree. The following is the calculation formula of
:
in which
is the theoretical value,
is the measured value of the bench test, and
is the total number of data to be fitted.
The paper uses the coefficient of determination to evaluate the degree of consistency between the measured and theoretical output speeds of the pump–motor system.
2.5. The Regression-Based Correction Method of HMCVT’s Speed Regulating Characteristics for Tractor
According to Equation (2), the relational expression of
, the transmission ratio of the variable-pump constant-motor system (i.e.,
, the ratio of the input speed of pump and the output speed of motor), and the displacement ratio is as follows:
According to the variation trend of measured data, the research uses the linear and nonlinear least squares methods for the regression analysis of the speed regulating characteristics of the variable-pimp constant-motor system. The polynomial regression [
40,
41] has good generalization ability and strong applicability in the field of engineering technology. In addition, according to Equations (2) and (9), the research adds items to the numerator and the denominator based on the original theoretical model to correct the model. To sum up, the paper uses four models in the regression analysis, including the 2-order polynomial model, the 3-order polynomial model, and two
reciprocal function models. The four models’ forms are as follows.
The 2-order polynomial model of speed regulating characteristics:
The 3-order polynomial model of speed regulating characteristics:
The first reciprocal function model of speed regulating characteristics:
The second reciprocal function model of speed regulating characteristics:
The paper uses the coefficient of determination
to evaluate and determine the final variation expression of the speed regulating characteristics of the variable-pump constant-motor system, and substitutes the final form of
into Equations (3)–(5) to obtain the corrected change law of the speed regulating characteristics of the tractor HMCVT.
Figure 3 shows the technical route of the correction method proposed.
2.6. The I-PSO-Based Optimization Design Method of HMCVT’s Speed Regulating Characteristics for Tractor
Figure 4 shows the original speed regulating characteristics of the HMCVT researched. The HMCVT of this model has three sections (H
0, HM
1, and HM
2), of which the speed regulating characteristics intersect mutually. Moreover, there are two synchronous section-shift transmission ratios. The design aims to ensure the continuity of the transmission ratio of the HMCVT.
To make the HMCVT system easier to control, the two synchronous section-shift transmission ratios should be distributed in the marginal area with the displacement ratio of −1~1 as much as possible because, in this case, the displacement ratio has a wider range of change. If the actually required displacement ratio has a small change range, the requirement to control precision is high. For instance, suppose that the designed HMCVT transmission ratio has a change range of 1~11; then, if displacement ratio changes in the range of −1~1, changing by 0.1 corresponds to changing by 0.5, on average; if displacement ratio changes in the range of −0.5~0.5, changing by 0.05 corresponds to changing by 0.5 on average. This indicates that the wider displacement ratio ’s available range is, the more applicable it is to practical engineering.
The paper sets the tire radius of the tractor as 0.9 m and the other transmission system’s transmission ratio as 9.
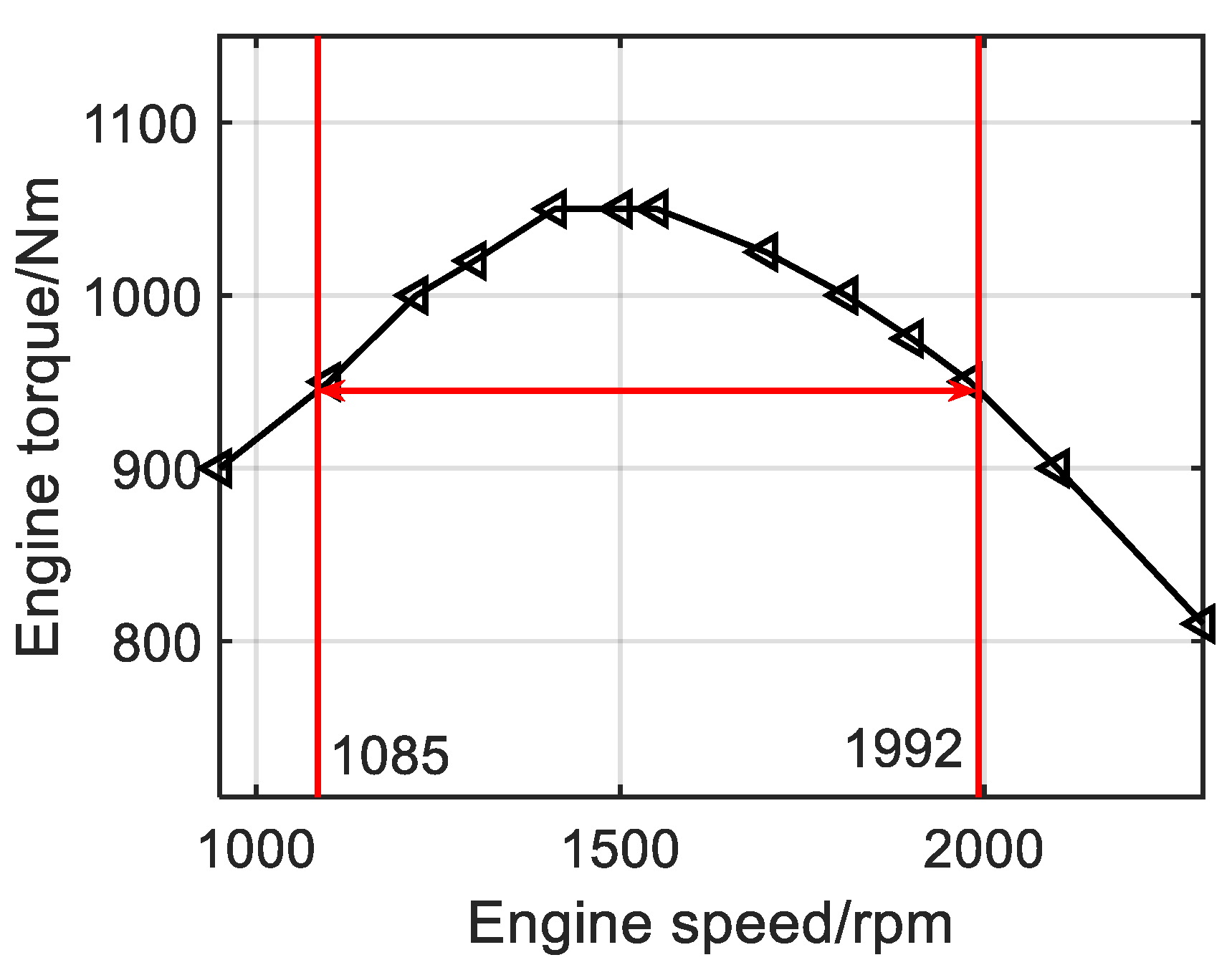
Figure 5 shows the external characteristics of the diesel engine used.
In
Figure 5, the values of torque in the positions marked with the left and right red lines (i.e., the speeds of the diesel engine are 1085 and 1992 r/min, respectively) correspond to 90% of the maximum torque of the diesel engine. The design in the paper uses Wang’s analysis of the research results of Resch and Renius for reference [
42]. In the whole life cycle of the tractor, the proportion of time for which the tractor works in the speed section of 4~20 km/h is approximately 76~93% (in which the proportion of time in 4~12 km/h is 61~68% and the proportion of time in 12~20 km/h is approximately 15~25%).
Therefore, the paper designs section HM
1 as the farmland working section of the tractor and section HM
2 as the driving and transportation section of the tractor. The design can also avoid the frequent switch problem of the wet clutch. To sum up, the transmission ratios of the sections of the tractor HMCVT are shown in
Table 2.
Section H0 is the starting section of the tractor, so, in the design, it should have a synchronous section-shift transmission ratio with section HM1, and the minimum vehicle speed corresponding to the synchronous section-shift transmission ratio should be equal to or greater than 4 km/h.
Moreover, when the displacement ratio
, in section HM
1, only the gear system is transmitting the power, so the power transmission efficiency is the maximum in this case. To ensure that section HM
1 fully plays its role in the case where the displacement ratio
is 0, the paper considers the speed of the diesel engine corresponding to 90% of maximum torque as the critical speed for calculation, and calculates the range of vehicle speed corresponding to the critical speed. Meanwhile, we further calculate the proportion of the vehicle speed range in 4~12 km/h, and take the HMCVT transmission ratio corresponding to 80% of the maximum proportion as the designed value of the expected transmission ratio of section HM
1 in the case where displacement ratio
is 0. The corresponding calculation formula (engine output speed through the HMCVT and other transmission systems to cause the tire to produce translation speed) of the tractor’s speed and the HMCVT transmission ratio is as follows (0.377 is the coefficient used for unit conversion):
in which
is the running speed of the tractor,
is the radius of the wheel,
is the working speed of the engine, and
is the overall transmission ratio of the other transmission system.
According to the calculation result, when displacement ratio , the value range of , the HMCVT transmission ratio corresponding to section HM1, is 5.37~7.82.
According to Equations (3)–(5), the HMCVT’s speed regulating characteristics have a nonlinearity characteristic and many characteristic parameters (i.e., many transmission parameters to be designed). We classify the transmission parameters of the HMCVT researched and obtain the following seven transmission parameters to be designed:
i1 and
i2;
i3,
i4, and
i5;
i6;
i7;
i8;
k1; and
k2. If we use the enumeration method to match the transmission parameters and optimize the speed regulating characteristics (suppose that the precision of the transmission parameter of the mechanical part is 0.01), it is necessary to carry out
times of calculation and matching processes (the range of gear transmission ratio is 0.5~4 and the value range of planetary row’s characteristic parameter is 2.5~4). In addition, there are constraint conditions for the transmission parameters in the matching process. Meanwhile, a great amount of work is required if replanning the HMCVT’s speed regulating characteristics to match the working requirements of other agricultural machinery. The reasons above cause the difficulty in optimizing the speed regulating characteristics using the enumeration method. The heuristic intelligent optimization algorithm has obvious advantages in performance optimization, parameter matching, and identification, and has been used to accurately solve a series of complex engineering problems [
43,
44,
45,
46].
Therefore, the paper proposes using the I-PSO algorithm for the optimization of the speed regulating characteristics of the tractor HMCVT and the matching of the transmission parameters. As for the I-PSO algorithm used, the paper uses the I-PSO algorithm process [
47,
48], proposed in previous research and verified for engineering applications, for reference.
The optimization of the speed regulating characteristics of the HMCVT is a multi-object optimization problem. The objective function
of the I-PSO algorithm proposed and used in the research is as follows:
in which
and
are the transmission ratios of the HMCVT working in section HM
1 with the displacement ratios of −1 and 1, respectively, and
is the transmission ratio of the HMCVT working in section HM
2 with the displacement ratio of 1.
According to Equation (15), the paper considers the sum of three sub-objective functions with equal weight as the overall objective function. Each term of a sub-objective function considers the absolute value of error between the design value and expected value as the calculation formula. Meanwhile, the constraint conditions of parameter matching are as follows:
in which
is the transmission ratio of the HMCVT working in stage H
0 when the displacement ratio is equal to
c.To sum up,
Figure 6 shows the optimization process of the speed regulating characteristics based on the I-PSO algorithm proposed.
2.7. The Comparative Analysis Method of Speed Regulating Characteristics
To compare the optimization results of the speed regulating characteristics better, the paper uses three comparative analysis methods.
First, we calculate the errors of , , and of the speed regulation of the tractor HMCVT after optimization with their expected values to verify the optimization result of the speed regulating characteristics. Meanwhile, we check whether the transmission ratios of , and the intersection position of section H0 and section HM1 are in the ranges specified by Equations (16)–(18).
Next, we compare and analyze the difference in speed regulating characteristics before and after optimization by calculating and generating figures.
Finally, based on the optimization results, we compare and analyze the difference in the speed regulating characteristics before and after correction by calculating and generating figures.
The research uses the coefficient of determination and the mean absolute percentage error MAPE for the analysis and evaluation of different types of speed regulating characteristics. See Equation (8) for the calculation formula of the coefficient of determination .
The following is the calculation formula of the mean absolute percentage error
MAPE.
in which
is the ideal expected value of the speed regulating characteristics of the HMCVT of the tractor,
is the designed result of the speed regulating characteristics of the HMCVT of the tractor, and
is the total number of data of the speed regulating characteristics.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}