
Simulation and Experiment of Spiral Soil Separation Mechanism of Compound Planter Based on Discrete Element Method (DEM)

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
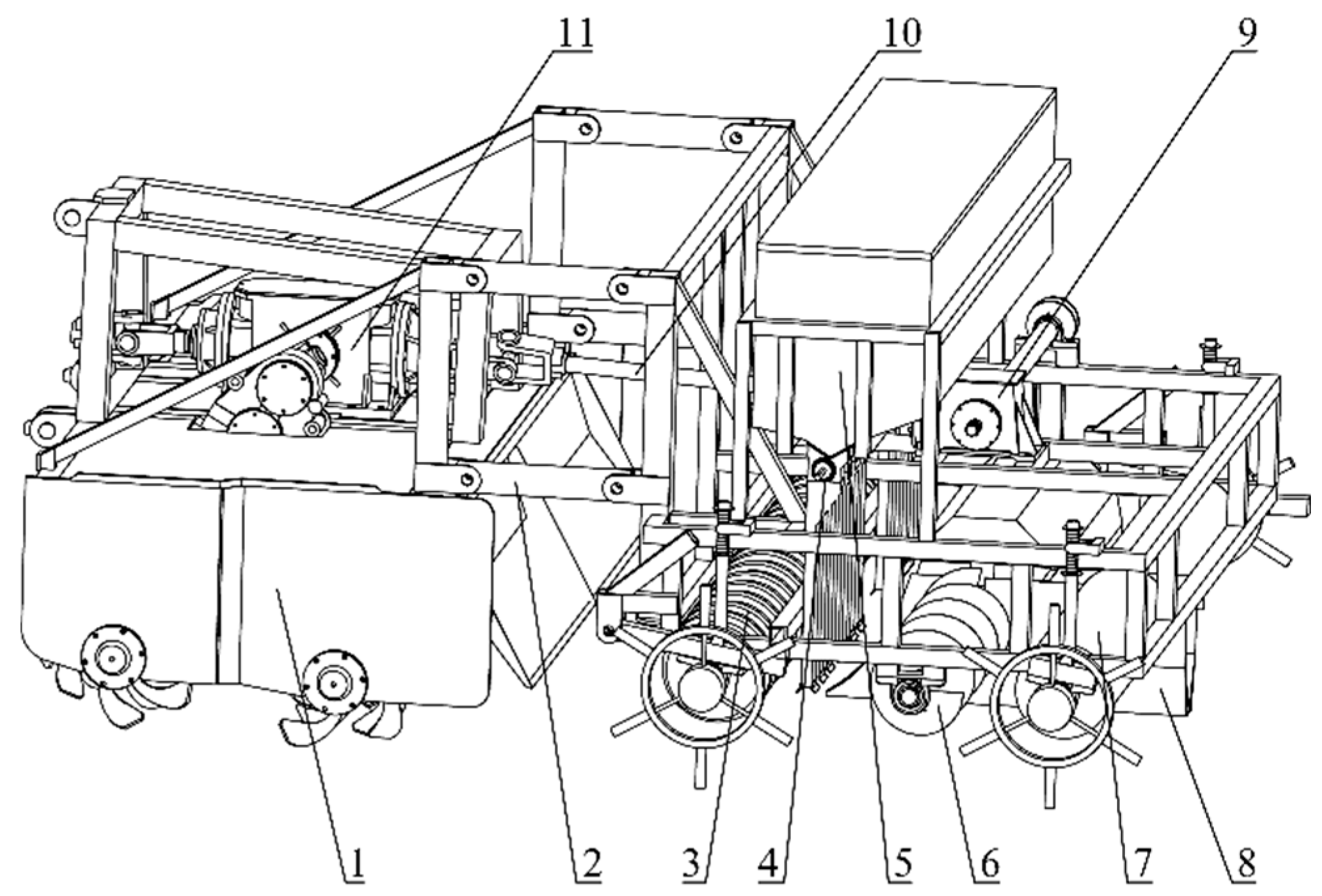
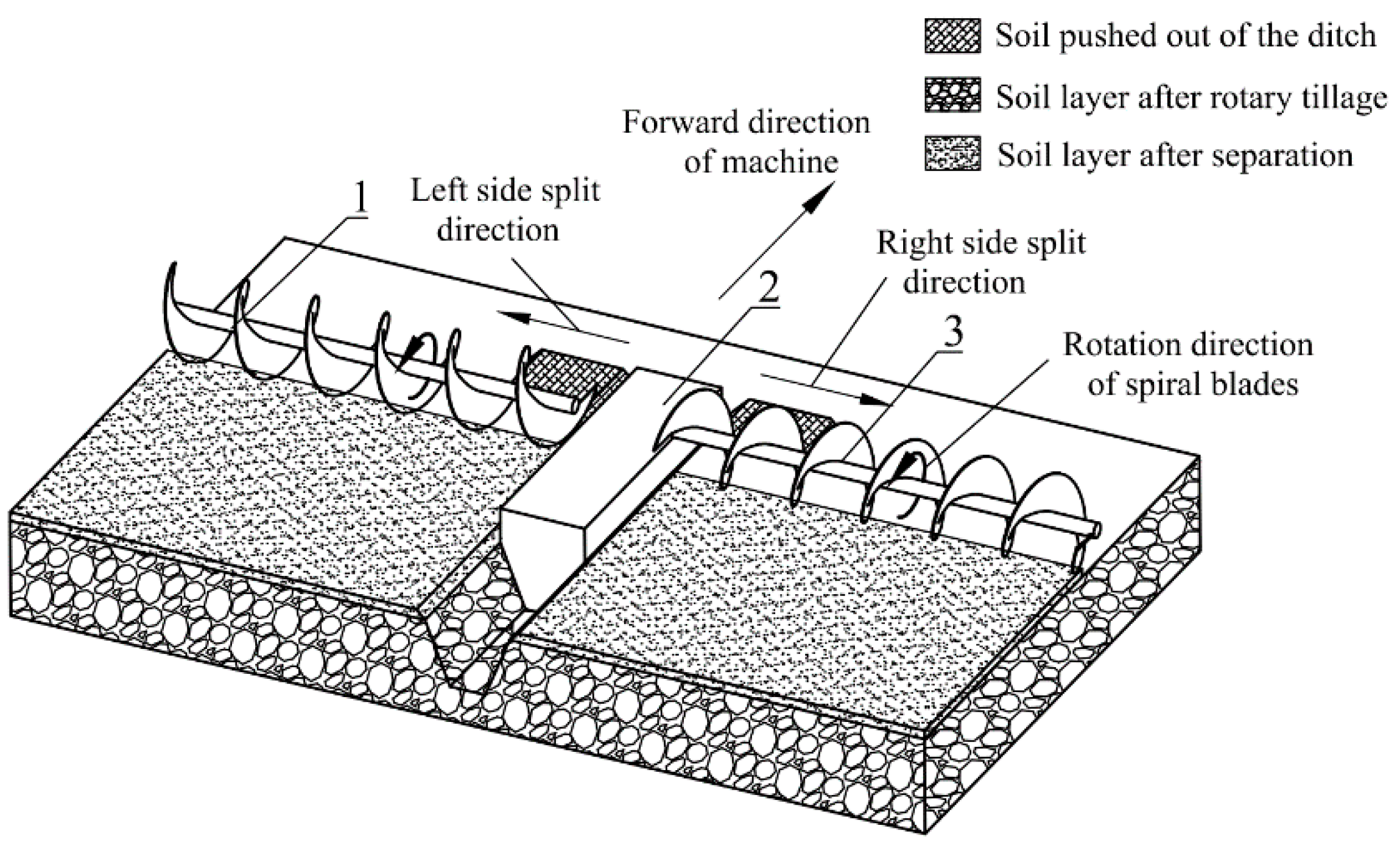
2.1. General Structure
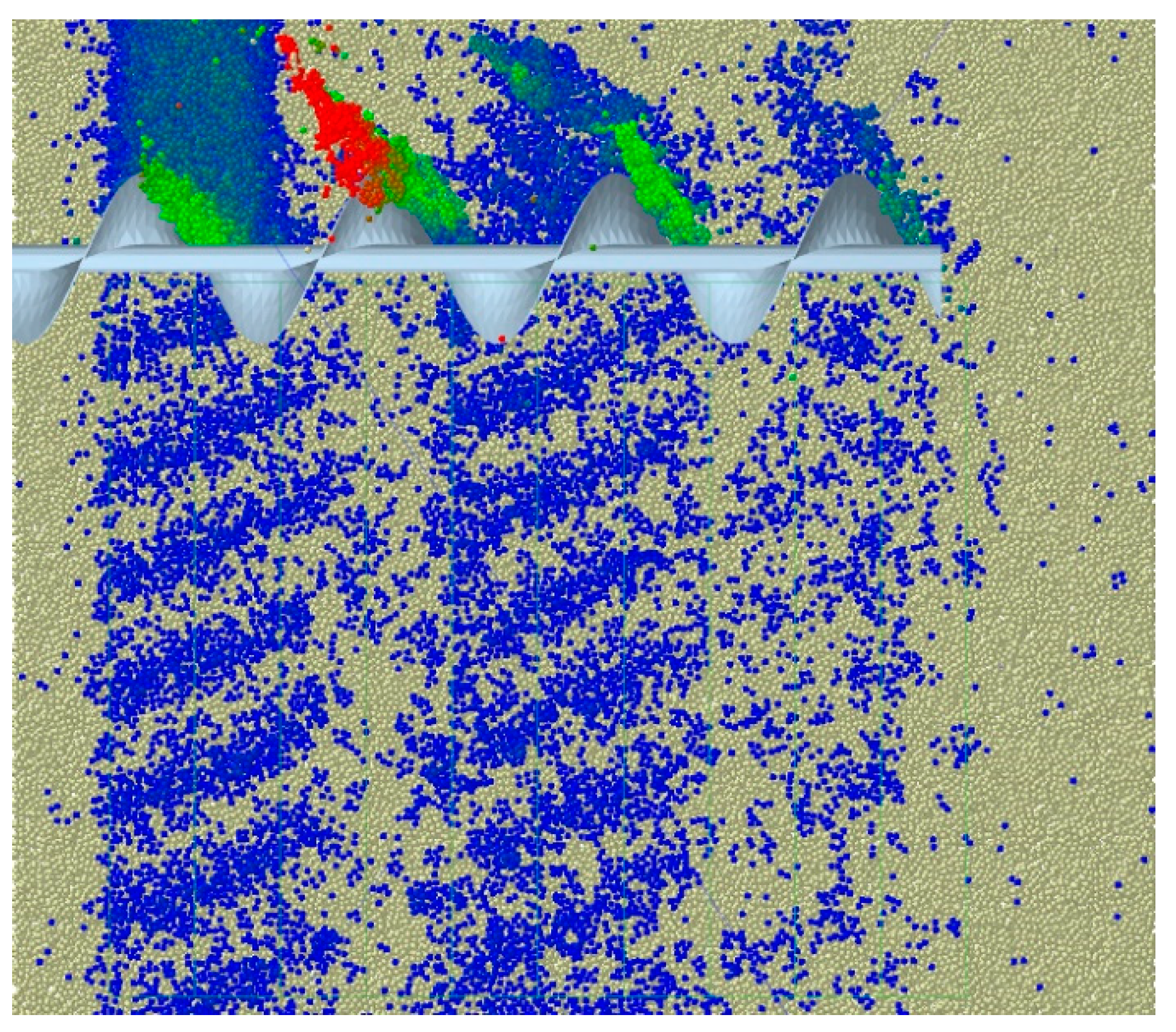
2.2. Discrete Element Simulation
2.3. Soil Separation Quality Evaluation Index
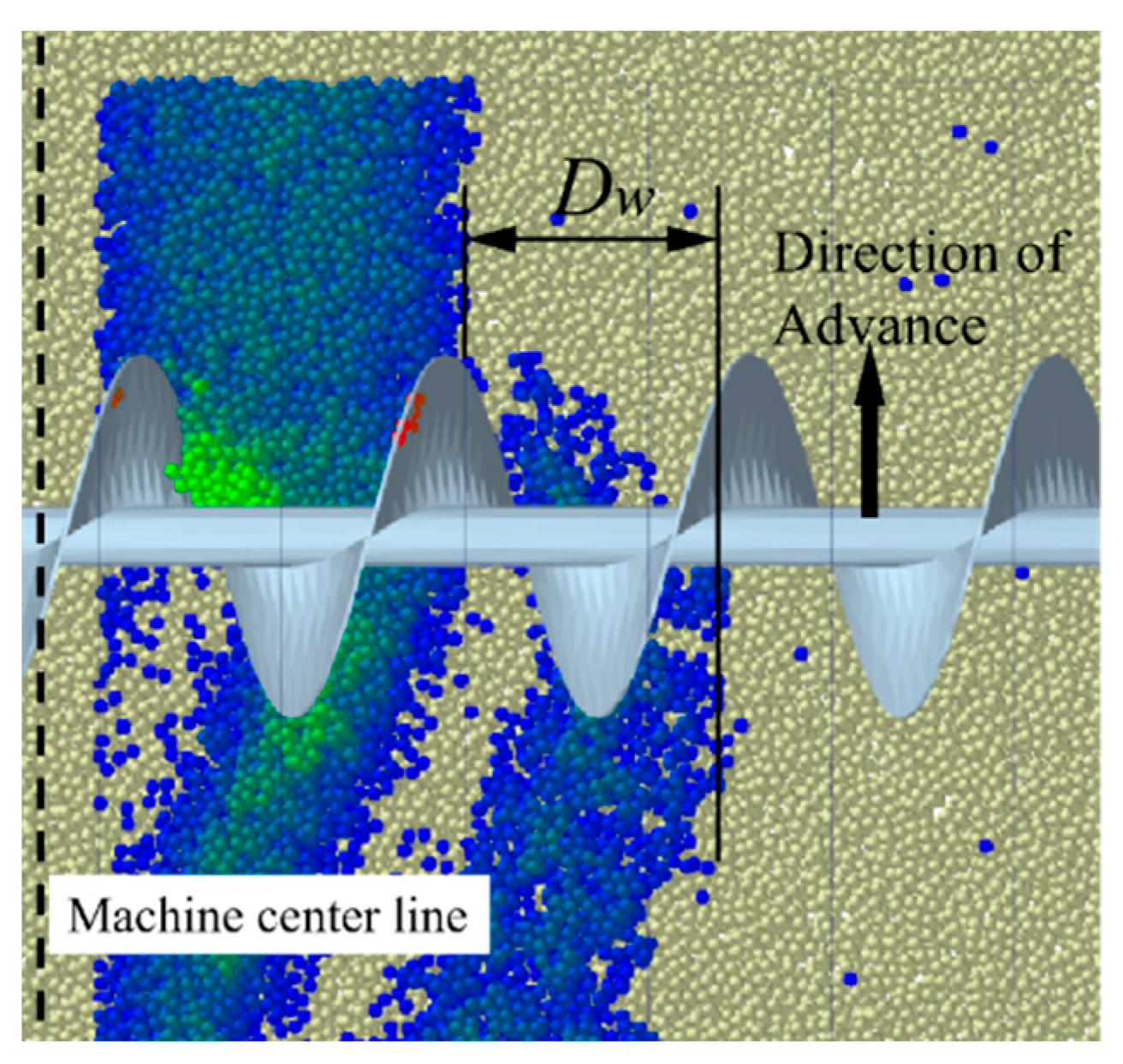
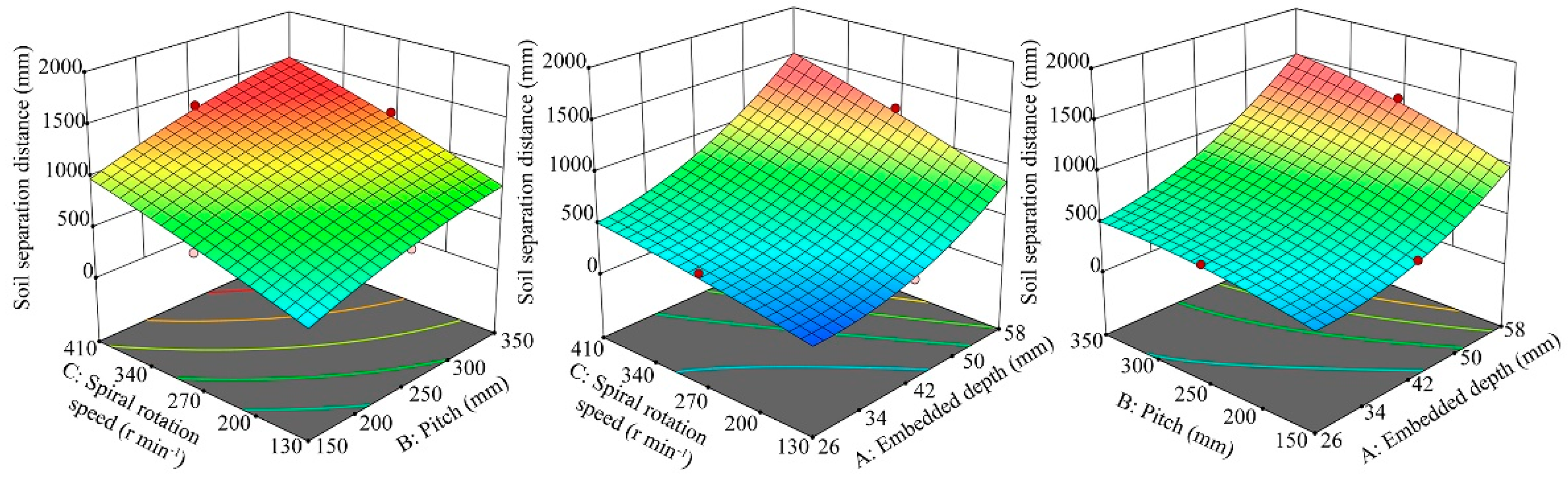
2.3.1. Soil Separation Distance
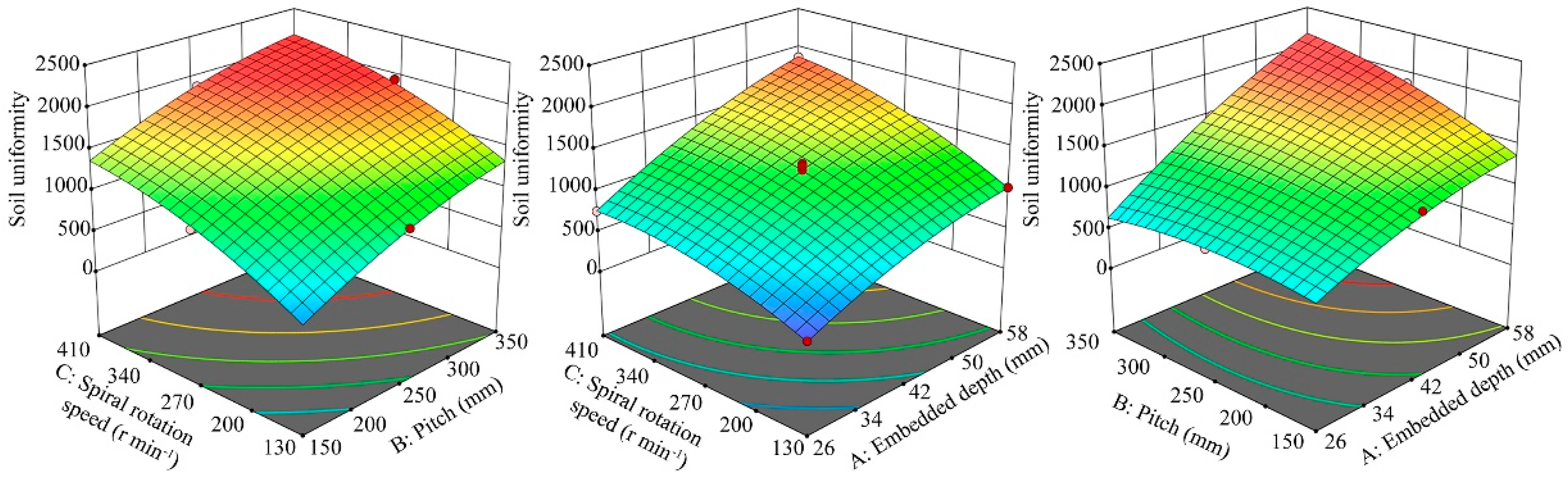
2.3.2. Soil Uniformity
2.4. Field Experiment
3. Results and Analysis
3.1. Single Factor Experiment
3.2. Multifactor Experiment
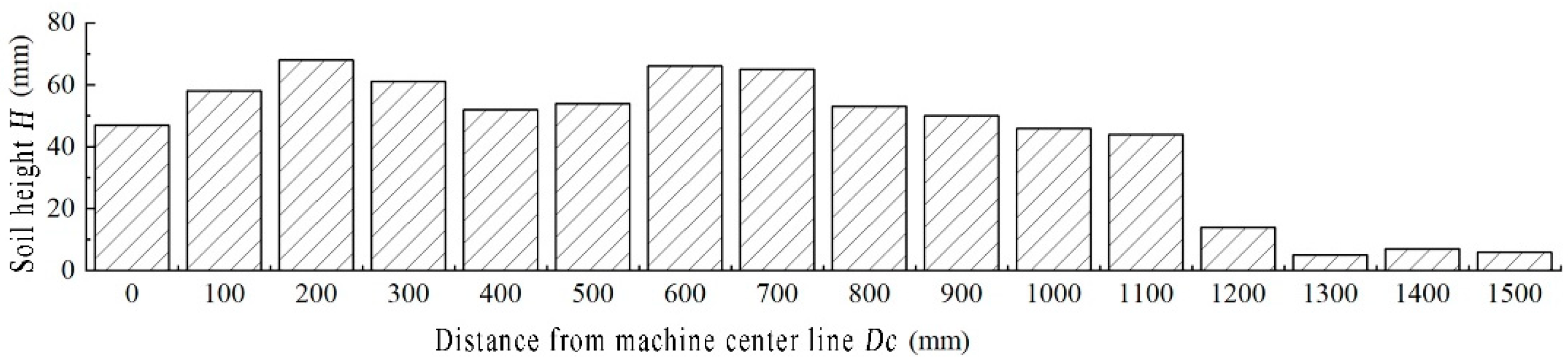
3.3. Field Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, H.; Xiong, W.; Mottaleb, K.A.; Krupnik, T.J.; Burgueño, J.; Pequeno, D.N.L.; Wu, W. Contrasting contributions of five factors to wheat yield growth in China by process-based and statistical models. Eur. J. Agron. 2021, 130, 126370. [Google Scholar] [CrossRef]
- Ren, A.-X.; Sun, M.; Wang, P.-R.; Xue, L.-Z.; Lei, M.-M.; Xue, J.-F.; Gao, Z.-Q.; Yang, Z.-P. Optimization of sowing date and seeding rate for high winter wheat yield based on pre-winter plant development and soil water usage in the Loess Plateau, China. J. Integr. Agric. 2019, 18, 33–42. [Google Scholar] [CrossRef]
- Chen, J.; Zheng, M.-J.; Pang, D.-W.; Yin, Y.-P.; Han, M.-M.; Li, Y.-X.; Luo, Y.-L.; Xu, X.; Li, Y.; Wang, Z.-L. Straw return and appropriate tillage method improve grain yield and nitrogen efficiency of winter wheat. J. Integr. Agric. 2017, 16, 1708–1719. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Shi, Y.; Zhao, J.; Yu, Z. Strip rotary tillage with subsoiling increases winter wheat yield by alleviating leaf senescence and increasing grain filling. Crop J. 2020, 8, 327–340. [Google Scholar] [CrossRef]
- Xi, X.; Gao, W.; Gu, C.; Shi, Y.; Han, L.; Zhang, Y.; Zhang, B.; Zhang, R. Optimisation of no-tube seeding and its application in rice planting. Biosyst. Eng. 2021, 210, 115–128. [Google Scholar] [CrossRef]
- Xi, X.; Gu, C.; Shi, Y.; Zhao, Y.; Zhang, Y.; Zhang, Q.; Jin, Y.; Zhang, R. Design and experiment of no-tube seeder for wheat sowing. Soil Tillage Res. 2020, 204, 104724. [Google Scholar] [CrossRef]
- Wu, F.; Zhai, L.-C.; Xu, P.; Zhang, Z.-B.; Baillo, E.H.; Tolosa, L.N.; Kimotho, R.N.; Jia, X.-L.; Guo, H.-Q. Effects of deep vertical rotary tillage on the grain yield and resource use efficiency of winter wheat in the Huang-Huai-Hai Plain of China. J. Integr. Agric. 2021, 20, 593–605. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, J.; Shang, J.; Cai, H. Capability of crop water content for revealing variability of winter wheat grain yield and soil moisture under limited irrigation. Sci. Total Environ. 2018, 631, 677–687. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Y.; Meng, Y.-L.; Cao, N.; Li, D.-S.; Zhou, Z.-G.; Chen, B.-L.; Dou, F.-G. The effects of soil moisture and salinity as functions of groundwater depth on wheat growth and yield in coastal saline soils. J. Integr. Agric. 2019, 18, 2472–2482. [Google Scholar] [CrossRef]
- Wu, S.; Ren, J.; Chen, Z.; Yang, P.; Li, H. Soil moisture estimation based on the microwave scattering mechanism during different crop phenological periods in a winter wheat-producing region. J. Hydrol. 2020, 590, 125521. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Gong, S.; Xu, D.; Mo, Y.; Zhang, B. Straw mulching improves soil water content, increases flag leaf photosynthetic parameters and maintaines the yield of winter wheat with different irrigation amounts. Agric. Water Manag. 2021, 249, 106809. [Google Scholar] [CrossRef]
- Aikins, K.A.; Barr, J.B.; Antille, D.L.; Ucgul, M.; Jensen, T.A.; Desbiolles, J.M.A. Analysis of effect of bentleg opener geometry on performance in cohesive soil using the discrete element method. Biosyst. Eng. 2021, 209, 106–124. [Google Scholar] [CrossRef]
- Aikins, K.A.; Antille, D.L.; Ucgul, M.; Barr, J.B.; Jensen, T.A.; Desbiolles, J.M.A. Analysis of effects of operating speed and depth on bentleg opener performance in cohesive soil using the discrete element method. Comput. Electron. Agric. 2021, 187, 106236. [Google Scholar] [CrossRef]
- Barr, J.; Desbiolles, J.; Ucgul, M.; Fielke, J.M. Bentleg furrow opener performance analysis using the discrete element method. Biosyst. Eng. 2020, 189, 99–115. [Google Scholar] [CrossRef]
- Qin, K.; Ding, W.; Fang, Z.; Du, T.; Zhao, S. Design and parameter optimization of double disk opener mechanism for harvest ditch and stalk-disposing machine. Trans. Chin. Soc. Agric. Eng. 2017, 33, 27–35. [Google Scholar]
- Bao, P.; Wu, M.; Guan, C.; Luo, H.; He, Y.; Xiang, W. Design of plow-rotary style ditching and ridging device for rapeseed seeding. Trans. Chin. Soc. Agric. Eng. 2017, 33, 23–31. [Google Scholar]
- Aikins, K.A.; Ucgul, M.; Barr, J.B.; Jensen, T.A.; Antille, D.L.; Desbiolles, J.M.A. Determination of discrete element model parameters for a cohesive soil and validation through narrow point opener performance analysis. Soil Tillage Res. 2021, 213, 105123. [Google Scholar] [CrossRef]
- Barr, J.B.; Desbiolles, J.M.A.; Fielke, J.M.; Ucgul, M. Development and field evaluation of a high-speed no–till seeding system. Soil Tillage Res. 2019, 194, 104337. [Google Scholar] [CrossRef]
- Bahrami, M.; Naderi-Boldaji, M.; Ghanbarian, D.; Ucgul, M.; Keller, T. Simulation of plate sinkage in soil using discrete element modelling: Calibration of model parameters and experimental validation. Soil Tillage Res. 2020, 203, 104700. [Google Scholar] [CrossRef]
- Li, B.; Chen, Y.; Chen, J. Modeling of soil–claw interaction using the discrete element method (DEM). Soil Tillage Res. 2016, 158, 177–185. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, X.; Yu, Y. Research and Analysis of the Optimum Gap of the Screw Extraction Device Based on EDEM Software. J. Agric. Mech. Res. 2017, 39, 38–42. [Google Scholar]
- Owen, P.J.; Cleary, P.W. Prediction of screw conveyor performance using the Discrete Element Method (DEM). Powder Technol. 2009, 193, 274–288. [Google Scholar] [CrossRef]
- Pezo, M.; Pezo, L.; Jovanović, A.P.; Terzić, A.; Andrić, L.; Lončar, B.; Kojić, P. Discrete element model of particle transport and premixing action in modified screw conveyors. Powder Technol. 2018, 336, 255–264. [Google Scholar] [CrossRef]
- Müller, D.; Fimbinger, E.; Brand, C. Algorithm for the determination of the angle of repose in bulk material analysis. Powder Technol. 2021, 383, 598–605. [Google Scholar] [CrossRef]
- Asaf, Z.; Rubinstein, D.; Shmulevich, I. Determination of discrete element model parameters required for soil tillage. Soil Tillage Res. 2007, 92, 227–242. [Google Scholar] [CrossRef]
- Mak, J.; Chen, Y.; Sadek, M.A. Determining parameters of a discrete element model for soil–tool interaction. Soil Tillage Res. 2012, 118, 117–122. [Google Scholar] [CrossRef]
- Obermayr, M.; Vrettos, C.; Eberhard, P.; Däuwel, T. A discrete element model and its experimental validation for the prediction of draft forces in cohesive soil. J. Terramechanics 2014, 53, 93–104. [Google Scholar] [CrossRef]
- Horabik, J.; Molenda, M. Parameters and contact models for DEM simulations of agricultural granular materials: A review. Biosyst. Eng. 2016, 147, 206–225. [Google Scholar] [CrossRef]
- Obermayr, M.; Dressler, K.; Vrettos, C.; Eberhard, P. Prediction of draft forces in cohesionless soil with the Discrete Element Method. J. Terramechanics 2011, 48, 347–358. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling of tillage: Determination of a suitable contact model and parameters for a cohesionless soil. Biosyst. Eng. 2014, 121, 105–117. [Google Scholar] [CrossRef]
- Wang, X.; Hu, H.; Wang, Q.; LI, H.; He, J.; Chen, W. Calibration Method of Soil Contact Characteristic Parameters Based on DEM Theory. Trans. Chin. Soc. Agric. Mach. 2017, 48, 78–85. [Google Scholar]
- Chen, C.; Quan, W.; Wu, M.; Zhang, W. Parameter optimization of vertical soil-filling hole-forming parts for rapeseed transplantation based on discrete element method. J. Hunan Agric. Univ. 2019, 45, 433–439. [Google Scholar]
- Yang, W.; Luo, X.; Wang, Z.; Zhang, M.; Zeng, S.; Zang, Y. Design and experiment of track filling assembly mounted on wheeled-tractor for paddy fields. Trans. Chin. Soc. Agric. Eng. 2016, 32, 26–31. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Soil Poisson’s ratio | 0.38 |
| Soil density (kg m−3) | 2680 |
| Soil shear modulus | 1.2 × 106 |
| Recovery coefficient between soil particles | 0.31 |
| Static friction factor between soil particles | 0.77 |
| Dynamic friction coefficient between soil particles | 0.08 |
| Steel Poisson’s ratio | 0.3 |
| Steel density (kg m−3) | 7850 |
| Shear modulus of steel | 7 × 1010 |
| Recovery coefficient between soil particles and steel | 0.3 |
| Static friction factor between soil particles and steel | 0.36 |
| Dynamic friction coefficient between soil particles and steel | 0.08 |
| Surface energy (J m−3) | 6.1 |
| Group | Test Factor | ||
|---|---|---|---|
| Embedded Depth (mm) | Pitch (mm) | Spiral Rotation Speed (r min−1) | |
| 1 | 42 | 300 | 130, 200, 270, 340, 410 |
| 2 | 42 | 150, 200, 250, 300, 350 | 270 |
| 3 | 26, 34, 42, 50, 58 | 300 | 270 |
| Test Factor | Symbol | Test Level | ||
|---|---|---|---|---|
| −1 | 0 | 1 | ||
| Embedded depth/(mm) | A | 26 | 42 | 58 |
| Pitch/(mm) | B | 150 | 250 | 350 |
| Spiral rotation speed/(r min−1) | C | 130 | 270 | 410 |
| Test Number | Factor | Response Value | |||
|---|---|---|---|---|---|
| Embedded Depth | Pitch | Spiral Rotary Speed | Soil Separation Distance (mm) | Soil Uniformity | |
| 1 | −1 | −1 | 0 | 170 | 494 |
| 2 | 0 | −1 | −1 | 132 | 442 |
| 3 | −1 | 1 | 0 | 428 | 597 |
| 4 | 0 | 0 | 0 | 520 | 1243 |
| 5 | 1 | −1 | 0 | 658 | 1019 |
| 6 | 0 | 0 | 0 | 443 | 1324 |
| 7 | 0 | 0 | 0 | 468 | 1152 |
| 8 | 0 | −1 | 1 | 493 | 1180 |
| 9 | 0 | 1 | 1 | 774 | 1478 |
| 10 | −1 | 0 | 1 | 493 | 757 |
| 11 | 0 | 0 | 0 | 562 | 1294 |
| 12 | −1 | 0 | −1 | 159 | 275 |
| 13 | 1 | 0 | −1 | 656 | 1010 |
| 14 | 0 | 0 | 0 | 576 | 1174 |
| 15 | 0 | 1 | −1 | 328 | 822 |
| 16 | 1 | 0 | 1 | 1350 | 1871 |
| 17 | 1 | 1 | 0 | 1250 | 1939 |
| Error Source |
Sum of Squares (×105) | Freedom |
Mean Square (×105) |
F Value | p Value |
|---|---|---|---|---|---|
| Model | 17.28 | 9 | 1.92 | 36.24 | <0.0001 *** |
| A | 8.87 | 1 | 8.87 | 167.47 | <0.0001 *** |
| B | 2.20 | 1 | 2.20 | 41.55 | 0.0004 *** |
| C | 4.21 | 1 | 4.21 | 79.46 | <0.0001 *** |
| AB | 0.28 | 1 | 0.28 | 5.27 | 0.0554 |
| C | 0.32 | 1 | 0.32 | 6.12 | 0.0426 * |
| BC | 0.02 | 1 | 0.02 | 0.34 | 0.5776 |
| A² | 1.26 | 1 | 1.26 | 23.71 | 0.0018 ** |
| B² | 0.15 | 1 | 0.15 | 2.86 | 0.1344 |
| C² | 0.02 | 1 | 0.02 | 0.39 | 0.5543 |
| Residual | 0.37 | 7 | 0.05 | ||
| Lack of Fit | 0.24 | 3 | 0.08 | 2.37 | 0.2113 |
| Pure Error | 0.13 | 4 | 0.03 | ||
| Total | 17.65 | 16 | |||
| R2 = 0.979, Adjusted R2 = 0.9520, Predicted R2 = 0.7730, Adeq Precision = 22.5568 | |||||
| Error Source | Sum of Squares (×105) | Freedom | Mean Square (×105) | F Value | p Value |
|---|---|---|---|---|---|
| Model | 34.47 | 9 | 3.83 | 71.89 | <0.0001 *** |
| A | 17.26 | 1 | 17.26 | 324.01 | <0.0001 *** |
| B | 3.62 | 1 | 3.62 | 67.89 | <0.0001 *** |
| C | 9.36 | 1 | 9.36 | 175.77 | <0.0001 *** |
| AB | 1.67 | 1 | 1.67 | 31.32 | 0.0008 *** |
| C | 0.36 | 1 | 0.36 | 6.74 | 0.0356 |
| BC | 0.02 | 1 | 0.02 | 0.32 | 0.5918 |
| A² | 0.54 | 1 | 0.54 | 10.22 | 0.0151 * |
| B² | 0.52 | 1 | 0.52 | 9.82 | 0.0165 * |
| C² | 0.89 | 1 | 0.89 | 16.72 | 0.0046 ** |
| Residual | 0.37 | 7 | 0.05 | ||
| Lack of Fit | 0.15 | 3 | 0.05 | 0.92 | 0.5069 |
| Pure Error | 0.22 | 4 | 0.06 | ||
| Total | 34.84 | 16 | |||
| R2 = 0.9893, Adjusted R2 = 0.9755, Predicted R2 = 0.9201, Adeq Precision = 29.0687 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Yuan, W.; Yu, J.; Jin, J.; Xie, D.; Xi, X.; Zhang, Y.; Zhang, R. Simulation and Experiment of Spiral Soil Separation Mechanism of Compound Planter Based on Discrete Element Method (DEM). Agriculture 2022, 12, 511. https://doi.org/10.3390/agriculture12040511
Han L, Yuan W, Yu J, Jin J, Xie D, Xi X, Zhang Y, Zhang R. Simulation and Experiment of Spiral Soil Separation Mechanism of Compound Planter Based on Discrete Element Method (DEM). Agriculture. 2022; 12(4):511. https://doi.org/10.3390/agriculture12040511
Chicago/Turabian StyleHan, Lianjie, Wei Yuan, Jinjin Yu, Jiajun Jin, Dongshen Xie, Xiaobo Xi, Yifu Zhang, and Ruihong Zhang. 2022. "Simulation and Experiment of Spiral Soil Separation Mechanism of Compound Planter Based on Discrete Element Method (DEM)" Agriculture 12, no. 4: 511. https://doi.org/10.3390/agriculture12040511