


Design and Experiment of Anti-Blocking Components for Shallow Stubble Clearing Based on Soil Bin Test
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Test Equipment and Materials
2.1.1. Soil Preparation
2.1.2. Straw Treatment
2.2. Test Contents and Methods
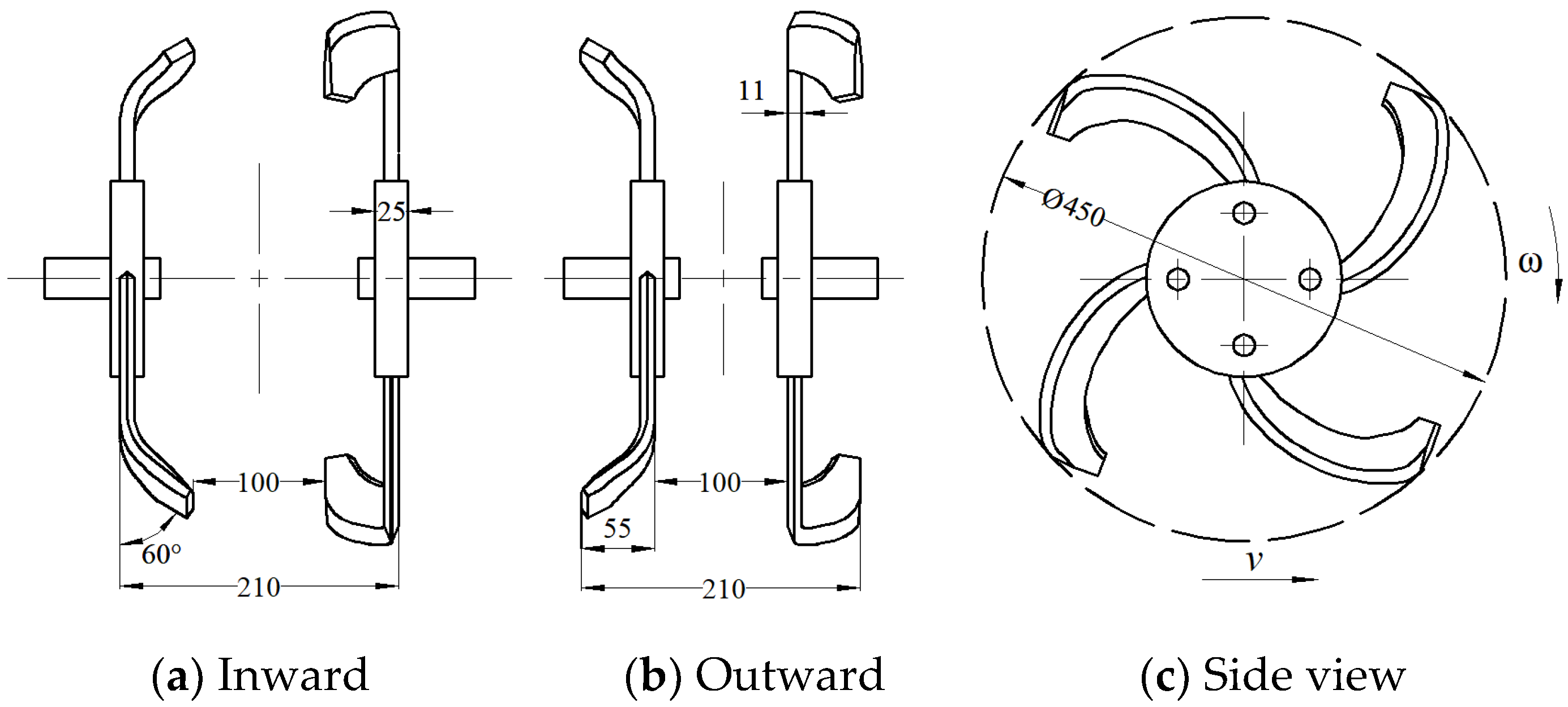
2.2.1. Upright Shallow Rotary Stubble Cleaning
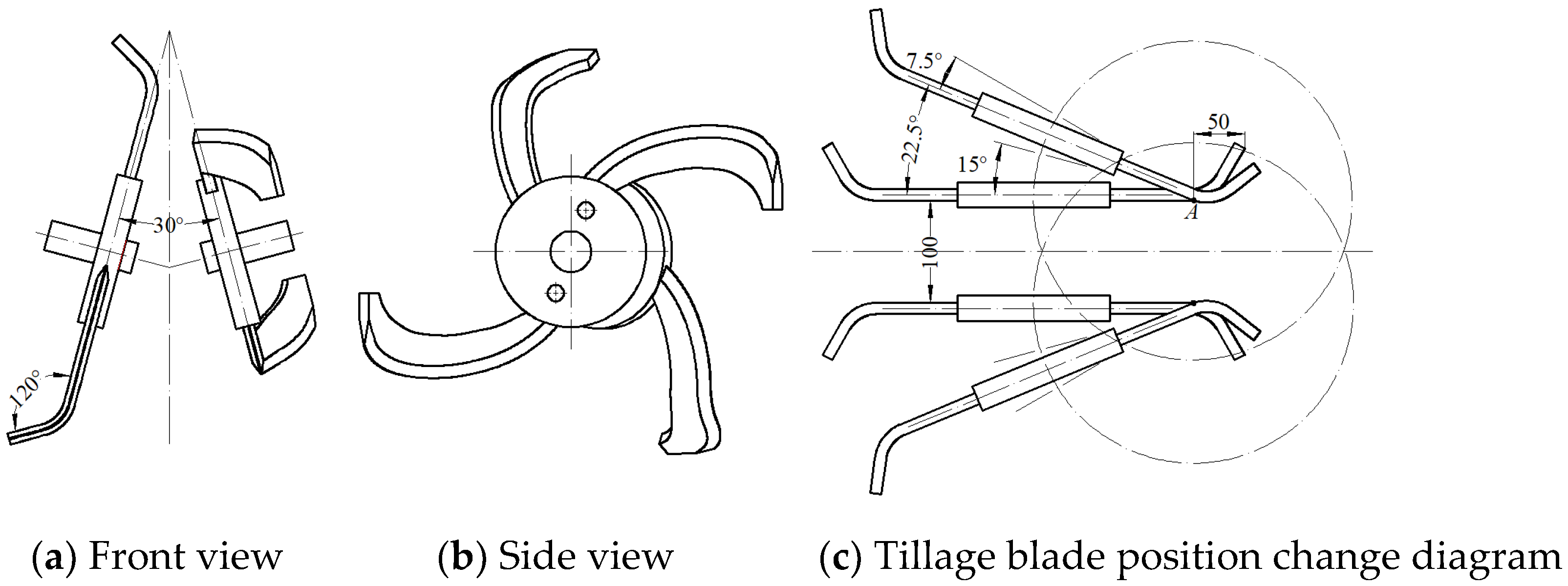
2.2.2. Oblique Shallow Rotary Stubble Cleaning
3. Test Data Collection and Processing
3.1. Determination of Residual Straw
3.2. Seedbed Parameters
3.3. Power Consumption and Force Measurement
4. Test Results and Analysis
4.1. Shallow Rotary Stubble-Cleaning Performance Analysis
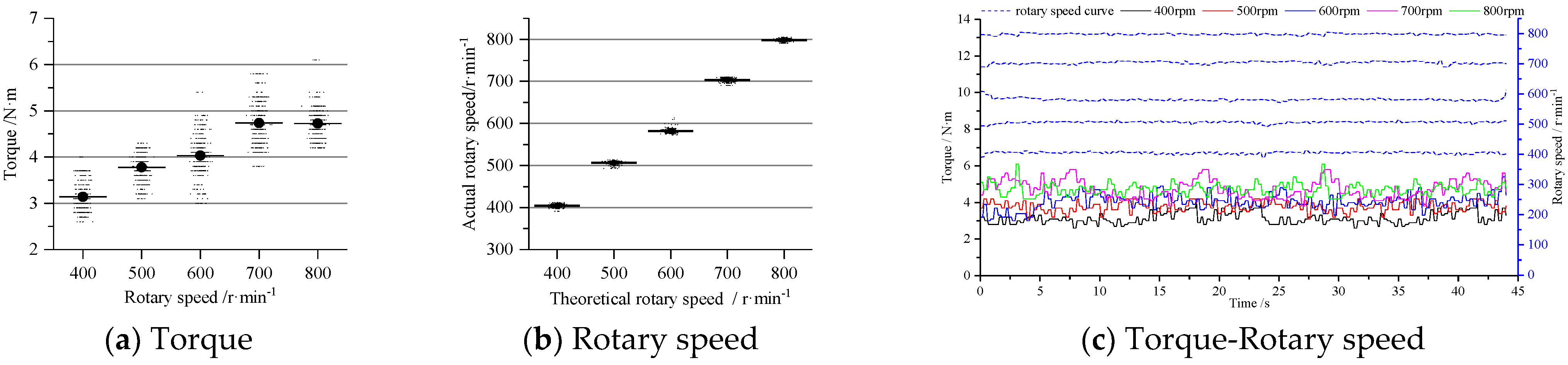
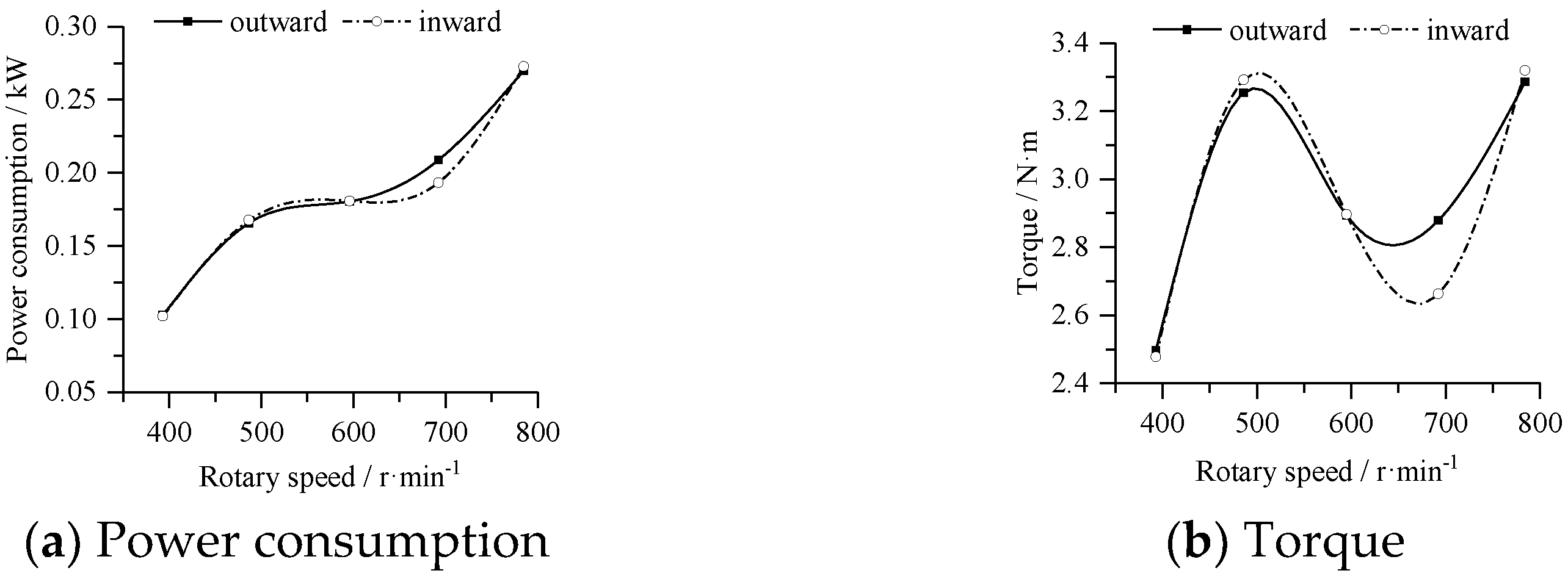
4.1.1. Rotary Speed and Torque Analysis
4.1.2. Subsubsection
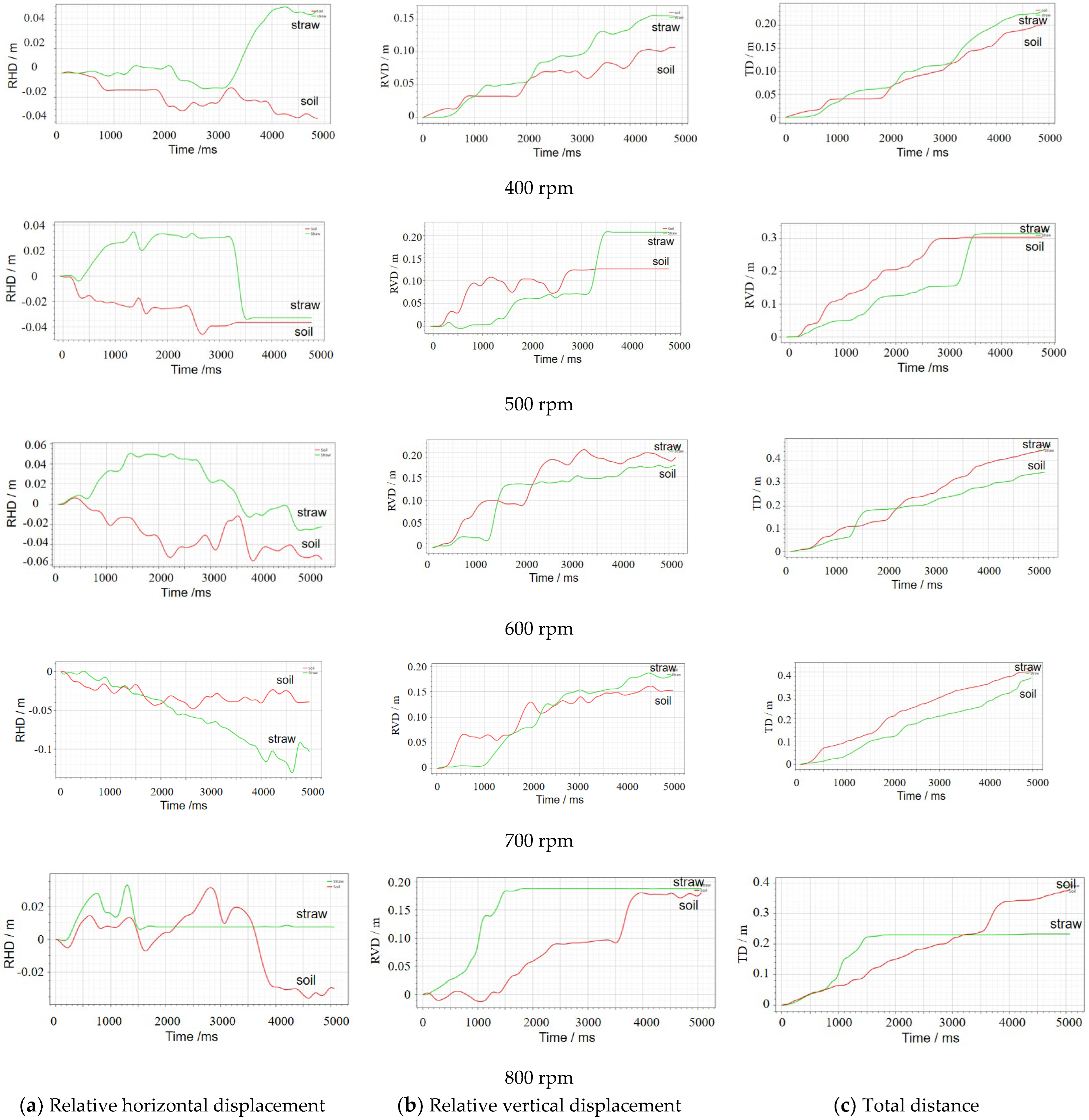
4.1.3. Analysis of Soil and Straw Movement
4.2. Analysis of Anti-Blocking Performance of Oblique Placement
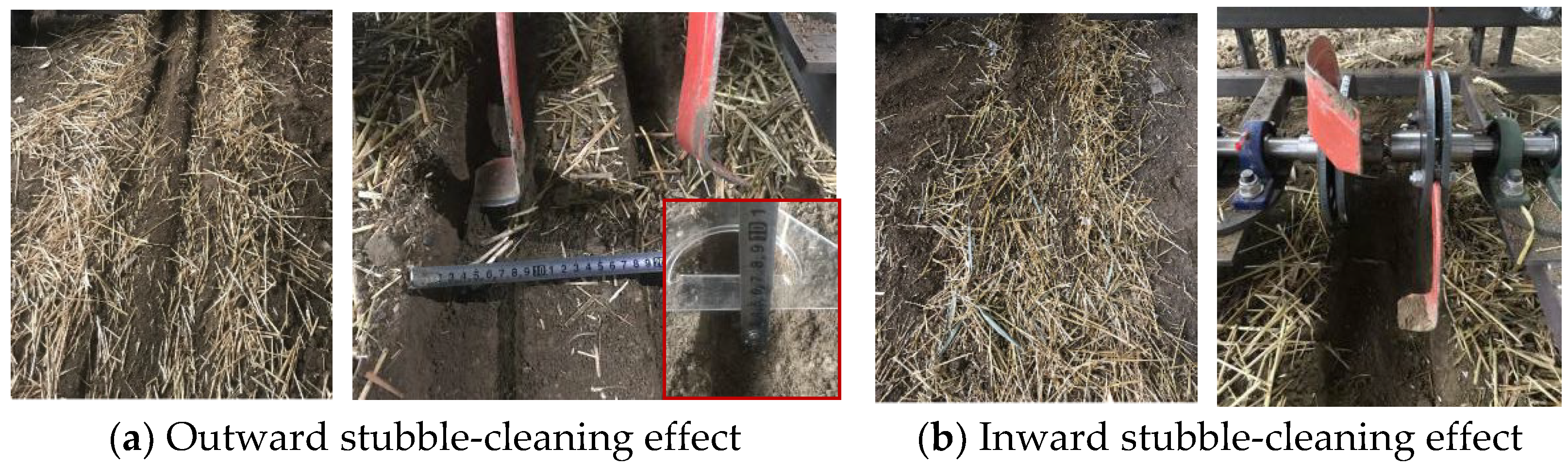
4.2.1. Analysis of Stubble-Clearing Effect
4.2.2. Seedbed Parameters
4.2.3. Power Consumption
5. Discussion
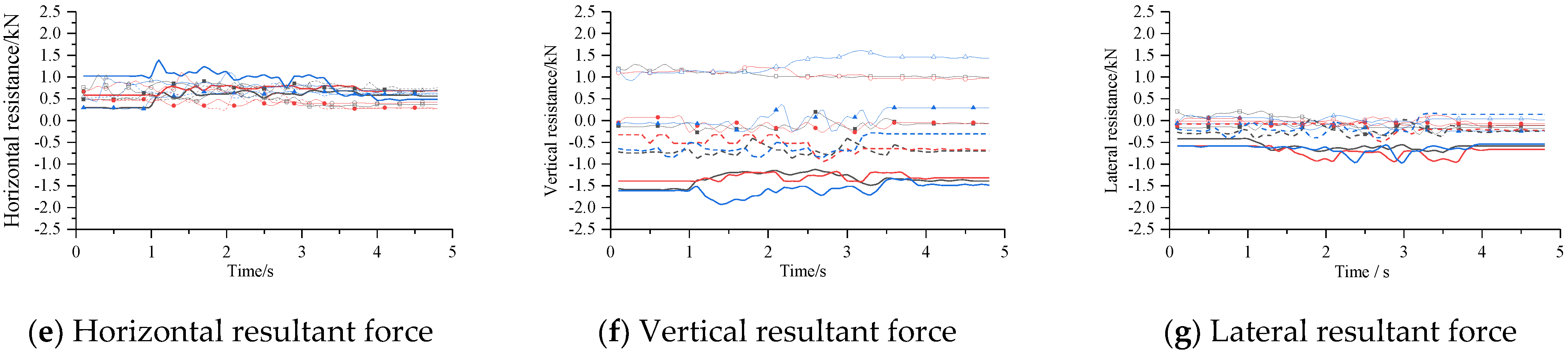
- Due to the difference of straw moisture content and soil texture in corn planting areas, the working environment of the corn seeder in the field was more complex. The influence of the lack of root remains on the stubble-cleaning device in the soil bin test only verified the stubble-cleaning performance test of the harvested surface straw and the stubble-cleaning performance test under the condition that the soil environment was relatively close to the field. The sensor value of the force-measuring frame had errors in the measurement process, which lead to the uneven change of the three-dimensional resistance. However, the resistance of the stubble-cleaning device could still be obtained when it was working.
- This research was a verification test of the stubble-cleaning performance of a type of tillage blade structure. By changing the position and structure of different tillage blades, the change of the oblique of the tillage blade could be achieved, and the stubble area (cutting width) and stubble angle could be increased with the oblique angle to achieve wide stubble cleaning. At present, the change of the structure of the blade and the anti-blocking of wheat stubble are rarely reported. On the basis of this research, the appropriate blade structure can be sought by changing different blade types to achieve the purpose of reducing power consumption and soil disturbance.
6. Conclusions
- (1)
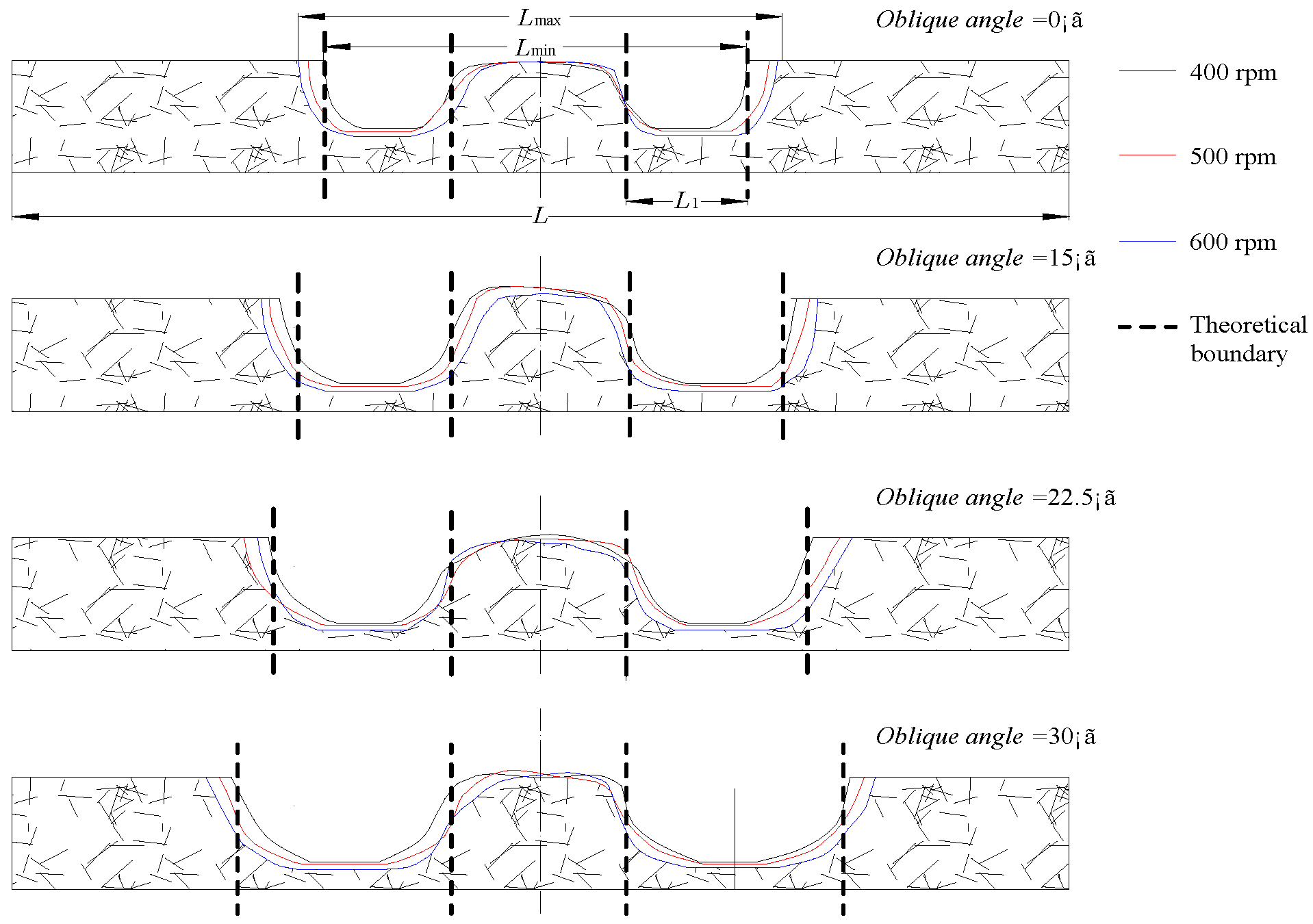
- In this paper, a shallow strip tillage and stubble-cleaning method was proposed to solve the problems existing in the no-tillage sowing of corn, which can be applied to the situation with a large amount of straw mulching. It was determined that the upright external mounting was more suitable for the stubble-cleaning device when the rotary speed was 400–600 rpm. On the basis of keeping the structural parameters of the rotary tillage blade, the oblique shallow rotary tillage was realized by changing the inclination of the positive outward installation. Taking the straw-clearance rate, seedbed parameters, and power consumption as indicators, the relationship between each factor level and each indicator was determined.
- (2)
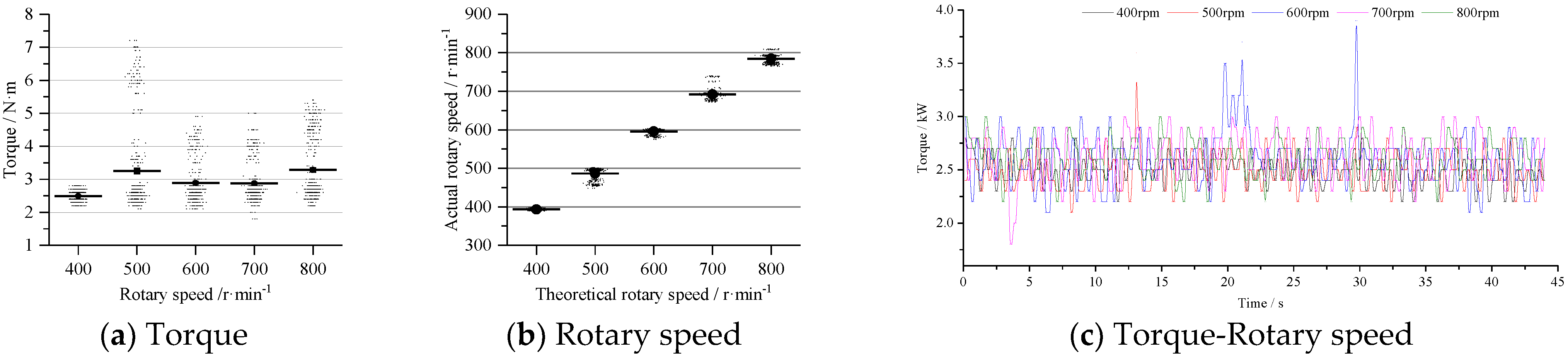
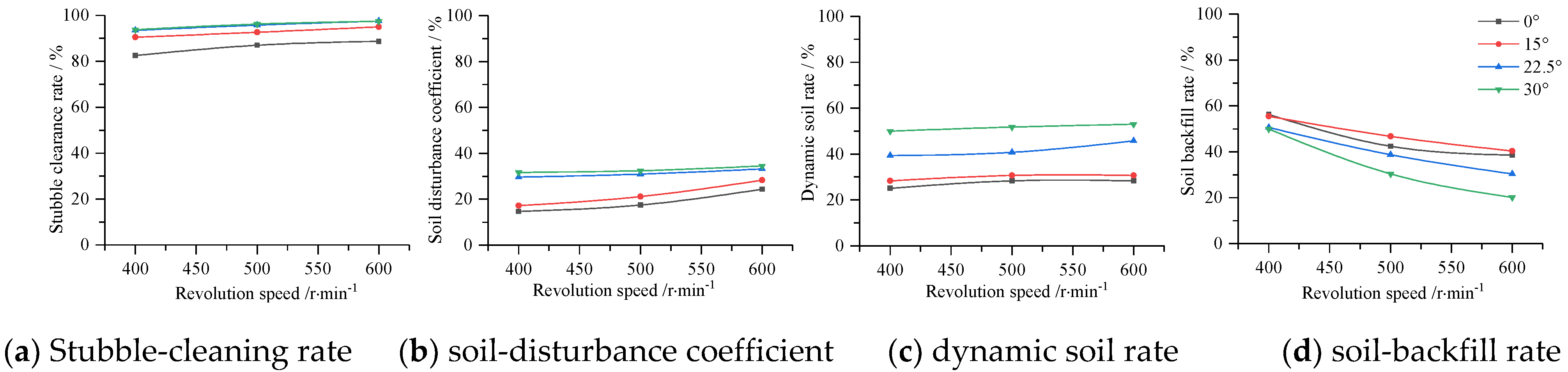
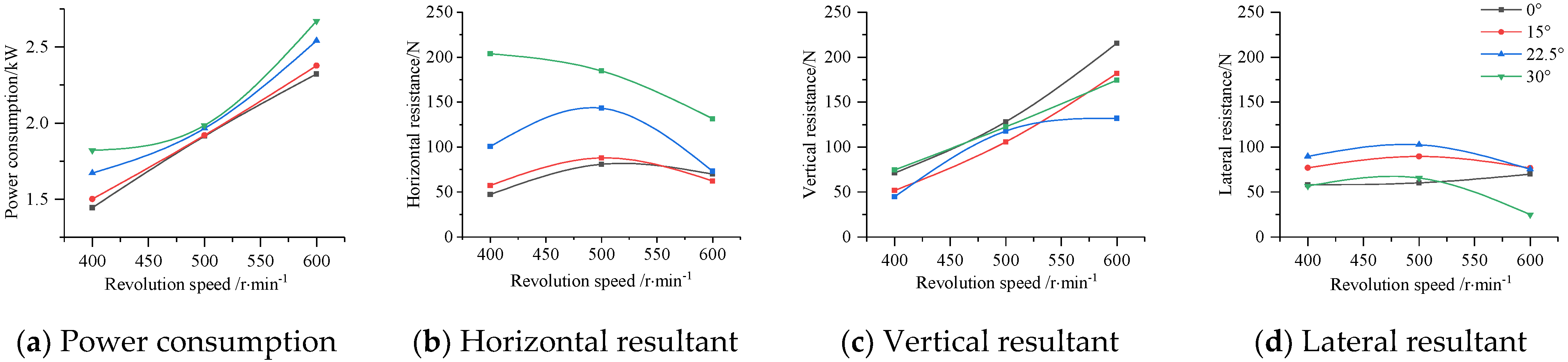
- A torque sensor and six-component force sensor were applied to the soil bin test platform to study the effects of four oblique angles (0°, 15°, 22.5°, 30°) on the stubble-cleaning effect, seedbed parameters, and power consumption at three rotary speeds (400, 500, 600 rpm). The results show that increasing the oblique angle and rotary speed could effectively reduce the straw residue on the seedbed and realize the cleaning of the seedling belt. The rotary speed and oblique angle had a great influence on the parameters of the seedbed. The influence of the oblique angle on the soil-disturbance coefficient and dynamic soil rate was greater than that of rotary speed. The influence of the rotary speed on the soil-backfill rate was greater than that of the oblique angle. Reducing the oblique angle and rotary speed could effectively improve the quality parameters of the seedbed. When the rotary speed was 400–500 rpm, the difference between the vertical resistance and lateral resistance was relatively small under different oblique angles, while the horizontal resistance was large. In the case of a fixed rotary speed, the horizontal resistance increased with the increase of the oblique angle; the vertical resistance and lateral resistance changes were more complex.
- (3)
- This test was also a verification test of a shallow rotary stubble-cleaning device to determine the influence of each factor on the stubble-cleaning rate, seedbed parameters, power consumption, and three-dimensional resistance. The parameter range of each factor can be selected according to the demand index. In the later stage, the rotary speed, oblique angle, and device structure can be selected and optimized by allocating the weight of each index. In the future, it is possible to achieve a low soil-breaking rate and soil-disturbance coefficient of the seedbed, low power consumption, and high stubble cleaning by replacing different blade types, so as to meet the requirements of no tillage sowing with different stubble coverage and different straw types.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Nie, S.W. Effects of Straw Incorporation in Wheat-Maize Cropping System by Farm Mechanization. Master’s thesis, Henan Agricultural University, Zhengzhou, China, 2007. [Google Scholar]
- Gao, N.N. Study on Anti-Blocking Technology of Pushing and Separating Approaches for Maize No-Till Planting in Two-Crops-a-Year Areas. Ph.D. Thesis, China Agricultural University, Beijing, China, 2014. [Google Scholar]
- Dong, Z.P.; Zhang, X.L.; Zhang, Y.G. Damage characteristics occurrence regularity and control technology of proxenus lepigone. J. Hebei Agric. Sci. 2011, 15, 1–4. [Google Scholar]
- Torbert, H.A.; Ingram, J.T.; Prior, S.A. Planter aid for heavy residue conservation tillage systems. Agron. J. 2007, 99, 478–480. [Google Scholar] [CrossRef] [Green Version]
- Negadi, J.; Raoufat, M.H. Field performance of a pneumatic row crop planter equipped with active toothed coulter for direct planting of corn in wheat residue. Span. J. Agric. Res. 2013, 11, 327. [Google Scholar] [CrossRef] [Green Version]
- Fan, X.H.; Jia, H.L.; Zhang, W.H. Parametric analysis of finger-type anti-blocking residue-cleaner for no-till planting. Trans. CSAM 2011, 42, 56–60. [Google Scholar]
- Jia, H.L.; Liu, H.; Yu, H.B. Simulation and experiment on stubble clearance mechanism with concave claw-type for no tillage planter. Trans. CSAM 2018, 49, 68–77. [Google Scholar]
- Zhao, H.B.; He, J.; Li, H.W. Design and experiment of strip rotary-cut-throw anti-blocking implement. Trans. CSAM 2018, 49, 65–75. [Google Scholar]
- He, J.; Li, H.W.; Chen, H.T.; Lu, C.Y.; Wang, Q.J. Research progress of conservation tillage technology and machine. Trans. CSAM 2018, 49, 1–19. [Google Scholar]
- Zhao, J.L.; Jia, H.L.; Guo, M.Z.; Jiang, X.M.; Qu, W.J.; Wang, G. Design and experiment of supported roll-cutting anti-blocking mechanism with for no-till planter. Trans. CSAE 2014, 30, 18–28. [Google Scholar]
- Wang, H.Y.; Chen, H.T.; Ji, W.Y. Design and experiment of cleaning and covering mechanism for no-till seeder in wheat stubble fields. Trans. CSAE 2012, 28, 7–12. [Google Scholar]
- Gu, F.W.; Hu, Z.C.; Chen, Y.Q.; Wu, F. Development and experiment of peanut no-till planter under full wheat straw mulching based on “clean area planting”. Trans. CSAE 2016, 32, 15–23. [Google Scholar]
- Jiang, J.L.; Gong, L.N.; Wang, D.W.; Wang, G.P. Design and experiment for driving double coulters anti-blockage device of no-till planter. Trans. CSAE 2012, 28, 17–22. [Google Scholar]
- Kong, L.D.; Sang, Z.Z.; Wang, G.L. Experimental study on oblique rotary tillage. Trans. CSAM 2000, 31, 30–34. [Google Scholar]
- Gao, J.M.; Liu, X.D.; Qi, H.D. Simulation and experiment of soil casting during oblique submerged reversely rotary tillage. Trans. CSAE 2019, 35, 54–63. [Google Scholar]
- Chen, H.T.; Hou, L.; Hou, S.Y. Design and optimization experiment of anti-blocking mechanism of no-tillage planter for grand ridge with raw corn stubble. Trans. CSAM 2018, 49, 59–67. [Google Scholar]
- Fang, H.M.; Ji, C.Y.; Zhang, Q.Y.; Guo, J. Force analysis of rotary blade based on distinct element method. Trans. CSAE 2016, 32, 54–59. [Google Scholar]
- Fang, H.M.; Ji, C.Y.; Ahmed, A.T.; Zhang, Q.Y.; Guo, J. Simulation analysis of straw movement in straw-soil-rotary blade system. Trans. CSAM 2016, 47, 60–67. [Google Scholar]
- Fang, H.M.; Ji, C.Y.; Farman, A.C.; Guo, J.; Zhang, Q.Y.; Chaudhry, A. Analysis of soil dynamic behavior during rotary tillage based on distinct element method. Trans. CSAM 2016, 47, 22–28. [Google Scholar]
- Australian Centre for International Agricultural Research. Available online: https://www.aciar.gov.au/publication/development-conservation-farming-implements-two-wheel-tractors-power-tillers-cambodia (accessed on 1 September 2022).
- Matin, M.A.; Desbiolles, J.M.A.; Fielke, J.M. Strip-tillage using rotating straight blades: Effect of cutting edge geometry on furrow parameters. Soil Tillage Res. 2016, 155, 271–279. [Google Scholar] [CrossRef]
- Matin, M.A.; Fielke, J.M.; Desbiolles, J.M.A. Furrow parameters in rotary strip-tillage: Effect of blade geometry and rotary speed. J. Biosyst. Eng. 2014, 118, 7–15. [Google Scholar] [CrossRef]
- Yao, W.Y.; Zhao, D.B.; Miao, H.Q.; Cui, P.D.; Wei, M.J.; Diao, P.S. Design and experiment of oblique anti-blocking device for no-tillage planter with shallow plowing stubble clearing. Trans. CSAM 2022, 53, 42–52. [Google Scholar]
- GB/T20865-2017. S.; Agricultural Industry Standards of the People’s Republic of China. No or Little-Tillage Fertilizes-Seeder. China National Standardization Administration, General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China: Beijing, China, 2017.














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, W.; Diao, P.; Miao, H.; Li, S. Design and Experiment of Anti-Blocking Components for Shallow Stubble Clearing Based on Soil Bin Test. Agriculture 2022, 12, 1728. https://doi.org/10.3390/agriculture12101728
Yao W, Diao P, Miao H, Li S. Design and Experiment of Anti-Blocking Components for Shallow Stubble Clearing Based on Soil Bin Test. Agriculture. 2022; 12(10):1728. https://doi.org/10.3390/agriculture12101728
Chicago/Turabian StyleYao, Wenyan, Peisong Diao, Hequan Miao, and Shaochuan Li. 2022. "Design and Experiment of Anti-Blocking Components for Shallow Stubble Clearing Based on Soil Bin Test" Agriculture 12, no. 10: 1728. https://doi.org/10.3390/agriculture12101728