
Simulator Fidelity Does Not Affect Training for Robot-Assisted Minimally Invasive Surgery


Abstract
:1. Introduction
2. Materials and Methods
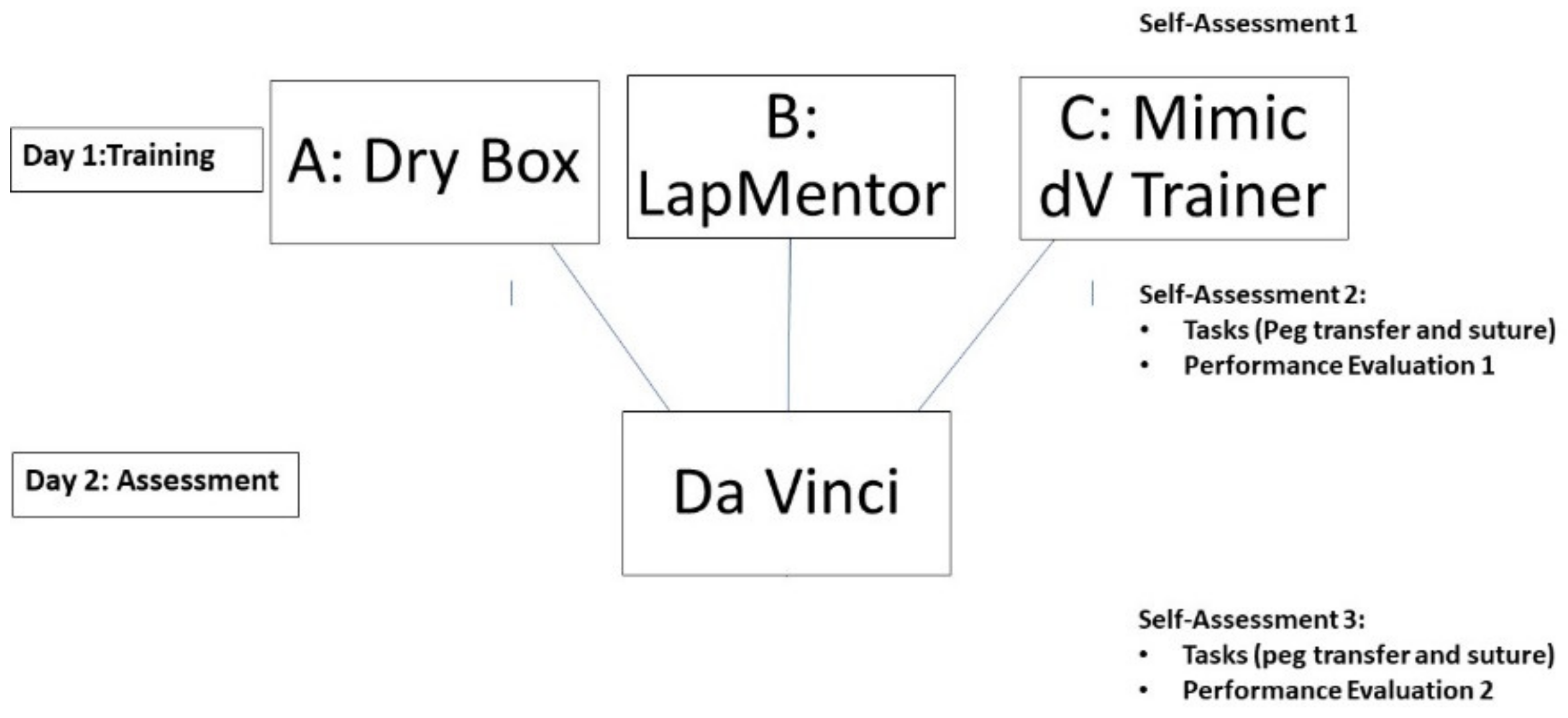
2.1. Study Design and Participants
2.2. Simulators
2.3. Exercises
2.4. Assessment
2.5. Statistical Analysis
2.6. Sample size
3. Results
3.1. Participant Characteristics before the Study
3.2. Performance on the Training Exercise
3.3. Participant Characteristics after the Training Exercise
3.4. Performance on the Assessment Exercise: Time
3.5. Performance on the Assessment Exercise: GEARS Scores
3.6. Participant Characteristics after the Assessment Exercise
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lefor, A.K.; Harada, K.; Dosis, A.; Mitsuishi, M. Motion analysis of the JHU-ISI Gesture and Skill Assessment Working Set using Robotics Video and Motion Assessment Software. Int. J. Comput. Assist. Radiol. Surg. 2020, 15, 2017–2025. [Google Scholar] [CrossRef] [PubMed]
- Satava, R.M. Virtual reality surgical simulator. The first steps. Surg. Endosc. 1993, 7, 203–205. [Google Scholar] [CrossRef] [PubMed]
- Moglia, A.; Ferrari, V.; Morelli, L.; Ferrari, M.; Mosca, F.; Cuschieri, A. A Systematic Review of Virtual Reality Simulators for Robot-assisted Surgery. Eur. Urol. 2016, 69, 1065–1080. [Google Scholar] [CrossRef] [PubMed]
- Julian, D.; Tanaka, A.; Mattingly, P.; Truong, M.; Perez, M.; Smith, R. A comparative analysis and guide to virtual reality robotic surgical simulators. Int. J. Med. Robot. 2018, 14, e1874. [Google Scholar] [CrossRef] [PubMed]
- Hertz, A.M.; George, E.I.; Vaccaro, C.M.; Brand, T.C. Head-to-Head Comparison of Three Virtual-Reality Robotic Surgery Simulators. JSLS 2018, 22, e2017.00081. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, S.B.; Rice, M.; Chang, C.; Zureikat, A.H.; Zeh, H.J., 3rd; Hogg, M.E. dV-Trainer vs. da Vinci Simulator: Comparison of Virtual Reality Platforms for Robotic Surgery. J. Surg. Res. 2021, 267, 695–704. [Google Scholar] [CrossRef]
- Bric, J.D.; Lumbard, D.C.; Frelich, M.J.; Gould, J.C. Current state of virtual reality simulation in robotic surgery training: A review. Surg. Endosc. 2016, 30, 2169–2178. [Google Scholar] [CrossRef]
- Dhanani, N.H.; Olavarria, O.A.; Bernardi, K.; Lyons, N.B.; Holihan, J.L.; Loor, M.; Haynes, A.B.; Liang, M.K. The Evidence Behind Robot-Assisted Abdominopelvic Surgery: A Systematic Review. Ann. Intern. Med. 2021, 174, 1110–1117. [Google Scholar] [CrossRef]
- Lefor, A.K. Robotic and laparoscopic surgery of the pancreas: An historical review. BMC Biomed. Eng. 2019, 1, 2–10. [Google Scholar] [CrossRef]
- Rosemurgy, A.; Ross, S.; Bourdeau, T.; Craigg, D.; Spence, J.; Alvior, J.; Sucandy, I. Robotic Pancreaticoduodenectomy Is the Future: Here and Now. J. Am. Coll. Surg. 2019, 228, 613–624. [Google Scholar] [CrossRef]
- Tun, J.K.; Alinier, G.; Tang, J.; Kneebone, R.L. Redefining simulation fidelity for healthcare education. Simul. Gaming 2015, 46, 159–174. [Google Scholar] [CrossRef] [Green Version]
- Lefor, A.K.; Harada, K.; Kawahira, H.; Mitsuishi, M. The effect of simulator fidelity on procedure skill training: A literature review. Int. J. Med. Educ. 2020, 11, 97–106. [Google Scholar] [CrossRef]
- Diesen, D.L.; Erhunmwunsee, L.; Bennett, K.M.; Ben-David, K.; Yurcisin, B.; Ceppa, E.P.; Omotosho, P.A.; Perez, A.; Pryor, A. Effectiveness of laparoscopic computer simulator versus usage of box trainer for endoscopic surgery training of novices. J. Surg. Educ. 2011, 68, 282–289. [Google Scholar] [CrossRef]
- Ahad, S.; Boehler, M.; Schwind, C.J.; Hassan, I. The effect of model fidelity on colonoscopic skills acquisition. A randomized controlled study. J. Surg. Educ. 2013, 70, 522–527. [Google Scholar] [CrossRef]
- Keyser, E.J.; Derossis, A.M.; Antoniuk, M.; Sigman, H.H.; Fried, G.M. A simplified simulator for the training and evaluation of laparoscopic skills. Surg. Endosc. 2000, 14, 149–153. [Google Scholar] [CrossRef]
- Sidhu, R.S.; Park, J.; Brydges, R.; MacRae, H.M.; Dubrowsk, A. laboratory-based vascular anastomosis training: A randomized controlled trial evaluating the effects of bench model fidelity and level of training on skill acquisition. J. Vasc. Surg. 2007, 45, 343–349. [Google Scholar] [CrossRef] [Green Version]
- FLS Program. FLS Manual Skills Written Instructions and Performance Guidelines. Available online: https://www.flsprogram.org (accessed on 17 November 2021).
- Goh, A.C.; Goldfarb, D.W.; Sander, J.C.; Miles, B.J.; Dunkin, B.J. Global evaluative assessment of robotic skills: Validation of a clinical assessment tool to measure robotic surgical skills. J. Urol. 2012, 187, 247–252. [Google Scholar] [CrossRef]
- Mann-Whitney U-Test Calculator. Available online: https://www.socscistatistics.com/tests/mannwhitney/default2.aspx (accessed on 31 August 2021).
- One-Way ANOVA Calculator. Available online: https://www.socscistatistics.com/tests/anova/default2.aspx (accessed on 31 August 2021).
- Tan, S.C.; Marlow, N.; Field, J.; Altree, M.; Babidge, W.; Hewett, P.; Maddern, G.J. A randomized crossover trial examining low-versus high-fidelity simulation in basic laparoscopic skills training. Surg. Endosc. 2012, 26, 3207–3214. [Google Scholar] [CrossRef]
- Grober, E.D.; Hamstra, S.J.; Wanzel, K.R.; Reznick, R.K.; Matsumoto, E.D.; Sidhu, R.S.; Jarvi, K.A. The educational impact of bench model fidelity on the acquisition of technical skill: The use of clinically relevant outcome measures. Ann. Surg. 2004, 240, 374–381. [Google Scholar] [CrossRef]
- Bruynzeel, H.; De Bruin, A.F.; Bonjer, H.J.; Lange, J.F.; Hop, W.C.; Ayodeji, I.D.; Kazemier, G. Desktop simulator: Key to universal training? Surg. Endosc. 2007, 21, 1637–1640. [Google Scholar] [CrossRef] [Green Version]
- Chung, S.Y.; Landsittel, D.; Chon, C.H.; Ng, C.S.; Fuchs, G.J. Laparoscopic skills training using a webcam trainer. J. Urol. 2005, 173, 180–183. [Google Scholar] [CrossRef] [PubMed]
- Chandrasekera, S.K.; Donohue, J.F.; Orley, D.; Barber, N.J.; Shah, N.; Bishai, P.M.; Muir, G.H. Basic laparoscopic surgical training: Examination of a low-cost alternative. Eur. Urol. 2006, 50, 1285–1291. [Google Scholar] [CrossRef] [PubMed]
- Sharpe, B.A.; MacHaidze, Z.; Ogan, K. Randomized comparison of standard laparoscopic trainer to novel, at-home, low-cost, camera-less laparoscopic trainer. Urology 2005, 66, 50–54. [Google Scholar] [CrossRef] [PubMed]
- Newcomb, L.K.; Bradley, M.S.; Truong, T.; Tang, M.; Comstock, B.; Li, Y.J.; Visco, A.G.; Siddiqui, N.Y. Correlation of Virtual Reality Simulation and Dry Lab Robotic Technical Skills. J. Minim. Invasive Gynecol. 2018, 25, 689–696. [Google Scholar] [CrossRef] [PubMed]
- Smith, R.; Patel, V.; Satava, R. Fundamentals of robotic surgery: A course of basic robotic surgery skills based upon a 14-society consensus template of outcomes measures and curriculum development. Int. J. Med. Robot. 2014, 10, 379–384. [Google Scholar] [CrossRef]
- Chen, J.; Cheng, N.; Cacciamani, G.; Oh, P.; Lin-Brande, M.; Remulla, D.; Gill, I.S.; Hung, A.J. Objective Assessment of Robotic Surgical Technical Skill: A Systematic Review. J. Urol. 2019, 201, 461–469. [Google Scholar] [CrossRef] [Green Version]
- Dubin, A.K.; Smith, R.; Julian, D.; Tanaka, A.; Mattingly, P. A Comparison of Robotic Simulation Performance on Basic Virtual Reality Skills: Simulator Subjective Versus Objective Assessment Tools. J. Minim. Invasive Gynecol. 2017, 24, 1184–1189. [Google Scholar] [CrossRef]
- Moorthy, K.; Munz, Y.; Dosis, A.; Bello, F.; Chang, A.; Darzi, A. Bimodal assessment of laparoscopic suturing skills: Construct and concurrent validity. Surg. Endosc. 2004, 18, 1608–1612. [Google Scholar] [CrossRef]
- Zhang, Y.; Hedo, R.; Rivera, A.; Rull, R.; Richardson, S.; Tu, X.M. Post hoc power analysis: Is it an informative and meaningful analysis? Gen. Psychiatr. 2019, 32, e100069. [Google Scholar] [CrossRef] [Green Version]
- Hishikawa, S.; Kawano, M.; Tanaka, H.; Konno, K.; Yasuda, Y.; Kawano, R.; Kobayashi, E.; Lefor, A.T. Simulation improves operator confidence but not performance of tube thoracostomy by medical students in a porcine model: A prospective controlled trial. Am. Surg. 2010, 76, 73–78. [Google Scholar] [CrossRef]
- Satava, R.M.; Stefanidis, D.; Levy, J.S.; Smith, R.; Martin, J.R.; Monfared, S.; Timsina, L.R.; Darzi, A.W.; Moglia, A.; Brand, T.C.; et al. Proving the Effectiveness of the Fundamentals of Robotic Surgery (FRS) Skills Curriculum: A Single-blinded, Multispecialty, Multi-institutional Randomized Control Trial. Ann. Surg. 2020, 272, 384–392. [Google Scholar] [CrossRef]
- Carpenter, B.T.; Sundaram, C.P. Training the next generation of surgeons in robotic surgery. Robot. Surg. 2017, 4, 39–44. [Google Scholar] [CrossRef] [Green Version]
- Bric, J.; Connolly, M.; Kastenmeier, A.; Goldblatt, M.; Gould, J.C. Proficiency training on a virtual reality robotic surgical skills curriculum. Surg. Endosc. 2014, 28, 3343–3348. [Google Scholar] [CrossRef]
- Raison, N.; Harrison, P.; Abe, T.; Aydin, A.; Ahmed, K.; Dasgupta, P. Procedural virtual reality simulation training for robotic surgery: A randomised controlled trial. Surg. Endosc. 2021, 35, 6897–6902. [Google Scholar] [CrossRef]


{kind=link}
| Dry Box Training | LapMentor Training | Mimic dV Trainer Training | ||||
|---|---|---|---|---|---|---|
| Characteristic | Novice | Expert | Novice | Expert | Novice | Expert |
| Male | 4/8 | 8/8 | 8/8 | 6/8 | 7/8 | 7/8 |
| Age, years | 24.9 | 40.3 | 23.4 | 39.8 | 23 | 29 |
| Years after medical school | 0.5 | 12.6 | 0 | 12.8 | 0 | 2.5 |
| Number of open operations | - | 381 | - | 701 | - | 45 |
| Number of laparoscopic operations | - | 80 | - | 161 | - | 20 |
| Number of robot-assisted operations | - | 0 | - | 0 | - | 0 |
| Hours per week of video games | 0.56 (3/8) | 0.25 (1/8) | 1.6 (1/5) | 0 | 6.75 (6/8) | 3.8 (3/5) |
| Survey Questions (1 = low, 7 = high) | ||||||
| Surgical ability | 1 (1, 1) | 3 (2, 4) | 1 (1, 1.75) | 4 (4, 4.25) | 4 (2.75, 4) | 2 (1.5, 3) |
| Laparoscopic surgery confidence | 1 (1, 1) | 2 (2, 3) | 1.5 (1, 2) | 3.5 (2.5, 4) | 4 (2.75, 4.25) | 2 (1, 2.5) |
| Robot-assisted surgery confidence | 1 (1, 1) | 1 (1, 1.5) | 1 (1, 1.75) | 1 (1, 1.25) | 4 (3, 4.25) | 1 (1, 2) |
| Training Device | Experience | N | GEARS 1 | GEARS 2 | Peg Transfer | Suture |
|---|---|---|---|---|---|---|
| Dry box | Novice | 8 | 15.5 ± 2.87 | 14.4 ± 4.59 | 2.34 ± 0.62 | 4.55 ± 1.96 |
| Dry box | Expert | 8 | 22.5 ± 2.87 | 17.1 ± 3.91 | 1.80 ± 0.40 | 2.22 ± 0.93 |
| Novice vs. Expert | p-Value | 0.17 | 0.01 | |||
| LapMentor | Novice | 8 | 17.8 ± 2.65 | 13.0 ± 2.24 | 3.31 ± 0.81 | 6.60 ± 1.52 |
| LapMentor | Expert | 8 | 23.8 ± 1.21 | 20.5 ± 3.53 | 2.08 ± 0.34 | 2.78 ± 1.19 |
| Novice vs. Expert | p-Value | 0.002 | 0.002 | |||
| Mimic dV Trainer | Novice | 8 | 19.4 ± 2.50 | 14.4 ± 2.51 | 0.84 ± 0.31 | 4.34 ± 1.08 |
| Mimic dV Trainer | Expert | 8 | 21.0 ± 2.44 | 13.6 ± 2.37 | 0.89 ± 0.72 | 2.27 ± 0.60 |
| Novice vs. Expert | p-Value | 0.453 | 0.0032 |
| Dry Box Training | LapMentor Training | Mimic dV Trainer Training | ||||
|---|---|---|---|---|---|---|
| Characteristic | Novice | Expert | Novice | Expert | Novice | Expert |
| Hours spent on training | 2.6 | 5.7 | 1.3 | 5.6 | 1.21 | 0.8 |
| Likert Scale Questions (1 = low, 7 = high) | ||||||
| Laparoscopic confidence after training | 1 (1, 2) | 3 (2.75, 4) | 1 (1, 2.5) | 3.5 (2, 4) | 3.5 (2.75, 4) | 2.0 (2, 3) |
| Robot-assisted confidence after training | 1 (1, 2) | 1 (1, 1.3) | 1.5 (1, 2.75) | 1.5 (1, 2) | 3.0 (3, 4) | 2.0 (1.5, 2.5) |
| Training would be better with da Vinci robot | 3.5 (1.75, 4) | 5 (4, 5.6) | 5 (4.25, 5.75) | 5 (3.75, 5) | 5.5 (5, 6.25) | 5.0 (4, 6) |
| Self-Assessment of training performance | 6 (5, 7) | 5 (5, 5.8) | 6 (5.25, 6) | 5 (4, 6.25) | 6.0 (5.75, 6.25) | 6.0 (6, 7) |
| Training Device | Experience | N | GEARS 1 | GEARS 2 | Peg Transfer | Suture |
|---|---|---|---|---|---|---|
| Dry box | Novice | 8 | 20.4 ± 2.77 | 17.1 ± 3.56 | 1.97 ± 0.43 | 3.86 ± 1.38 |
| Dry box | Expert | 8 | 24.6 ± 3.66 | 20.9 ± 5.40 | 2.78 ± 1.60 | 2.00 ± 0.40 |
| Novice vs. Expert | p-Value (power) | 0.12 | 0.013 (0.956) | |||
| LapMentor | Novice | 8 | 20.1 ± 1.64 | 18.3 ± 2.60 | 2.20 ± 0.59 | 3.20 ± 0.90 |
| LapMentor | Expert | 8 | 25.1 ± 3.22 | 20.1 ± 4.22 | 1.81 ± 0.23 | 1.77 ± 0.42 |
| Novice vs. Expert | p-Value (power) | 0.36 | 0.0019 (0.983) | |||
| Mimic dV Trainer | Novice | 8 | 21.8 ± 3.77 | 19.75 ± 4.71 | 2.23 ± 1.02 | 3.55 ± 1.09 |
| Mimic dV Trainer | Expert | 8 | 22.3 ± 1.38 | 23.1 ± 5.14 | 1.94 ± 0.47 | 2.25 ± 0.47 |
| Novice vs. Expert | p-Value (power) | 0.818 | 0.007 (0.872) | |||
| All Novice Participants | 24 | 20.9 ± 2.89 | 18.5 ± 3.76 | 2.13 ± 0.70 | 3.54 ± 1.13 | |
| All Expert Participants | 24 | 23.9 ± 3.34 | 21.4 ± 4.97 | 2.19 ± 1.04 | 1.90 ± 0.48 | |
| Novice vs. Expert | p-Value (power) | 0.0035 | 0.036 | 0.920 | 0.001 (1.00) |
| Dry Box Training | LapMentor Training | Mimic dV Trainer Training | ||||
|---|---|---|---|---|---|---|
| Likert Scale Questions (1 = low, 7 = high) | Novice | Expert | Novice | Expert | Novice | Expert |
| Training would have been better with the da Vinci robot | 4.5 (4, 5.25) | 5.5 (5, 6) | 6.5 (6, 6.75) | 5.5 (4.75, 6.25) | 6.0 (5.75, 7) | 7 (6.25, 7) |
| I was satisfied with the training device I used | 6.5 (5.5, 7) | 4.0 (4, 4.5) | 5.5 (5, 6) | 4.5 (4.75, 6) | 5.0 (4.5, 6.25) | 6.5 (5.25, 7) |
| Self-assessment of performance with the da Vinci robot | 1.5 (1, 2) | 2.5 (1.75, 3) | 3 (2, 5) | 2.0 (1.75, 2.25) | 3.5 (3, 5) | 3 (2.25, 3.75) |
| Confidence to use the da Vinci robot | 1.0 (1, 2) | 2.0 (1.75, 2.25) | 3.5 (2.75, 4.5) | 2.0 (1.75, 2) | 4.0 (3.75, 5.25) | 3.0 (2.25, 4) |
| Index | Liver Simulator | LapMentor | Mimic dV Trainer | ROSS | dVSS |
|---|---|---|---|---|---|
| User Interface | X-Box controller and 3D controller and simple joysticks | 3D controller, laparoscopic wands | 3D controller, similar to da Vinci robot | 3D controller, similar to da Vinci robot | 3D controller using the da Vinci robot |
| Instrument Function | 2 instruments, ultrasonic shears with realistic function | Multiple, with realistic function | Multiple, with realistic function | Multiple, with realistic function | Multiple, with realistic function |
| Kinematic Data | YES- standard format, same as da Vinci | YES- proprietary format | YES- proprietary format | YES- proprietary format | YES- proprietary format |
| Material Behavior | Realistic to touch/cut | Realistic to touch/cut | Realistic to touch/cut | Realistic to touch/cut | Realistic to touch/cut |
| Anatomic Accuracy | Yes | Yes | Yes | Yes | Yes |
| Web Site | - | https://simbionix.com (Accessed on 11 February 2023) | https://mimicsimulation.com/ (Accessed on 11 February 2023) | http://simulatedsurgicals.com/projects/ross/ (Accessed on 11 February 2023) | https://mimicsimulation.com/ (Accessed on 11 February 2023) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saito, S.; Endo, K.; Sakuma, Y.; Sata, N.; Lefor, A.K. Simulator Fidelity Does Not Affect Training for Robot-Assisted Minimally Invasive Surgery. J. Clin. Med. 2023, 12, 2557. https://doi.org/10.3390/jcm12072557
Saito S, Endo K, Sakuma Y, Sata N, Lefor AK. Simulator Fidelity Does Not Affect Training for Robot-Assisted Minimally Invasive Surgery. Journal of Clinical Medicine. 2023; 12(7):2557. https://doi.org/10.3390/jcm12072557
Chicago/Turabian StyleSaito, Shin, Kazuhiro Endo, Yasunaru Sakuma, Naohiro Sata, and Alan Kawarai Lefor. 2023. "Simulator Fidelity Does Not Affect Training for Robot-Assisted Minimally Invasive Surgery" Journal of Clinical Medicine 12, no. 7: 2557. https://doi.org/10.3390/jcm12072557