
Membrane Fouling Prediction Based on Tent-SSA-BP


Abstract
:1. Introduction
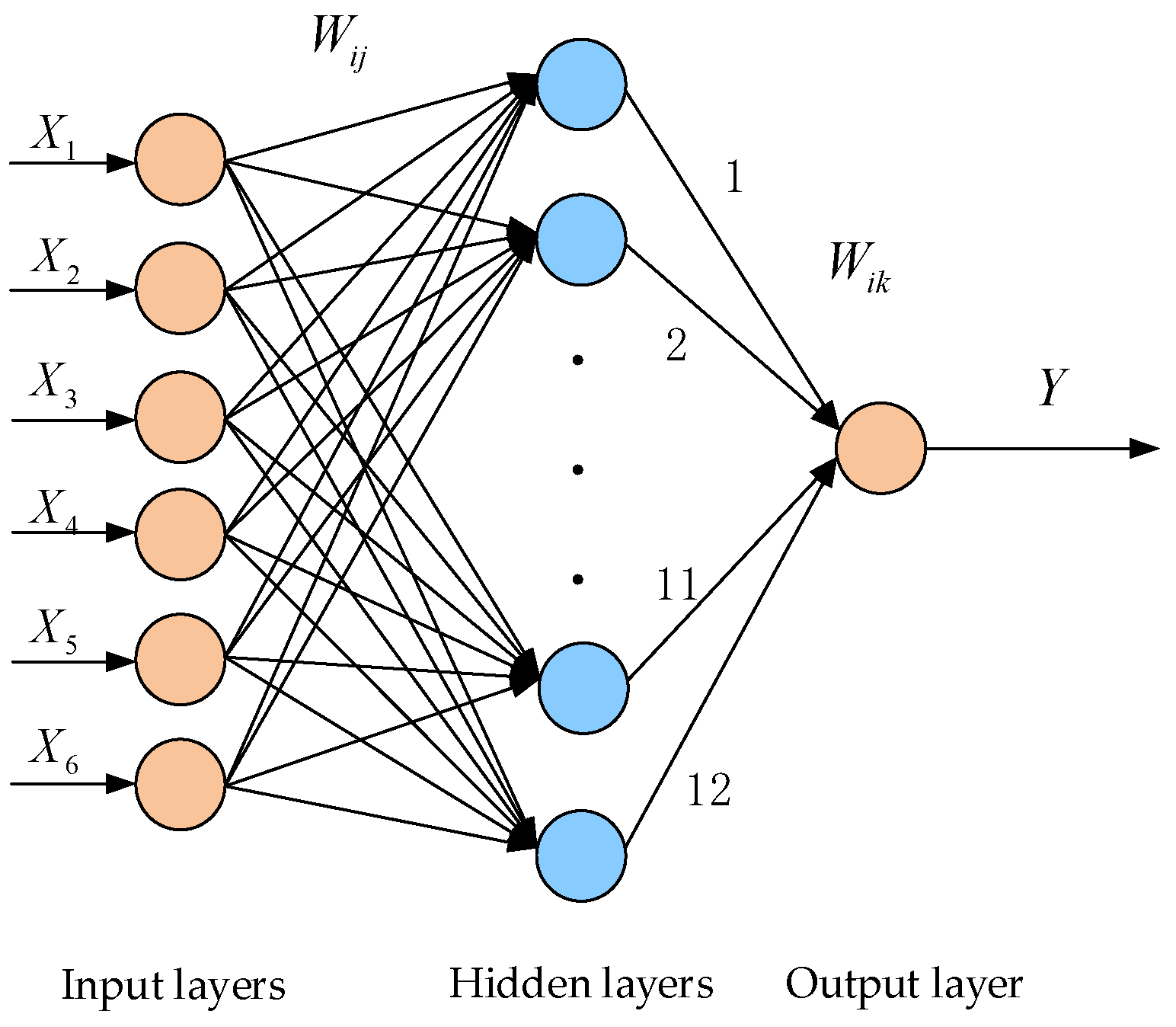
2. Theory Related to BP Neural Networks
3. Sparrow Search Algorithm
3.1. Standard SSA
3.2. Improved SSA
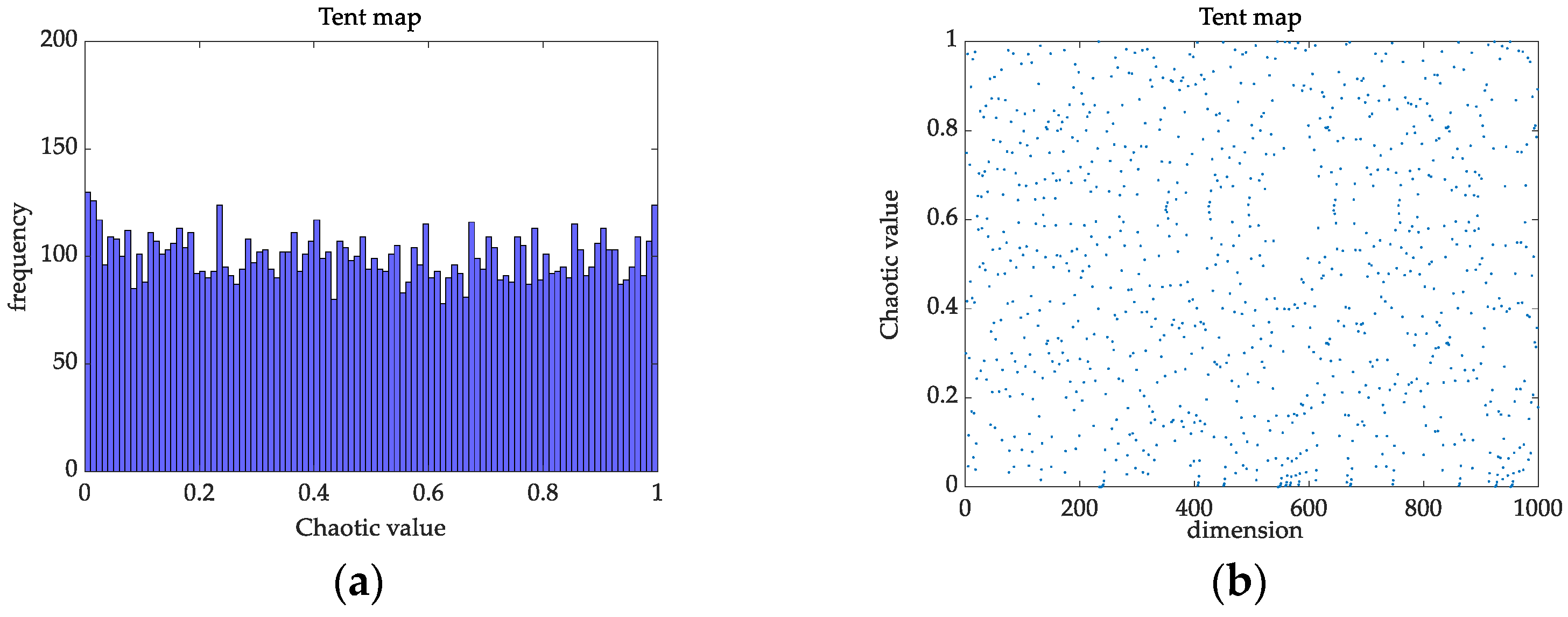
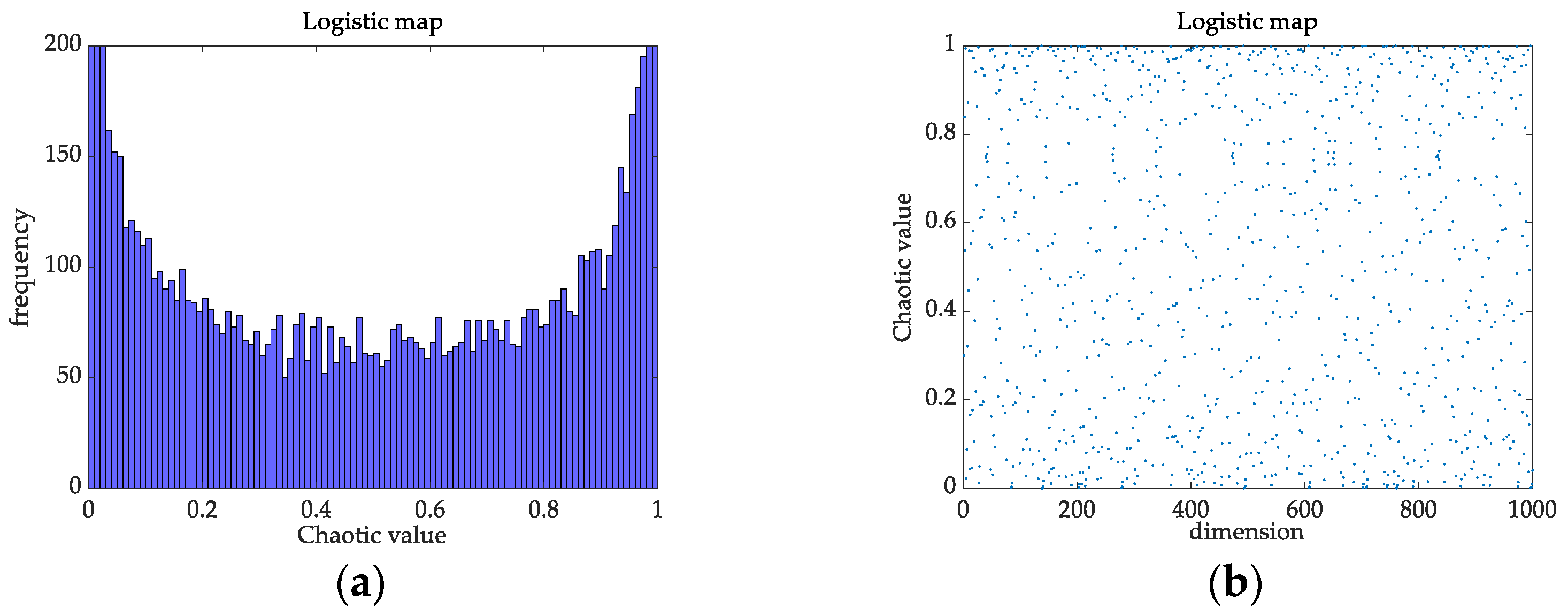
3.2.1. Tent Chaotic Mapping
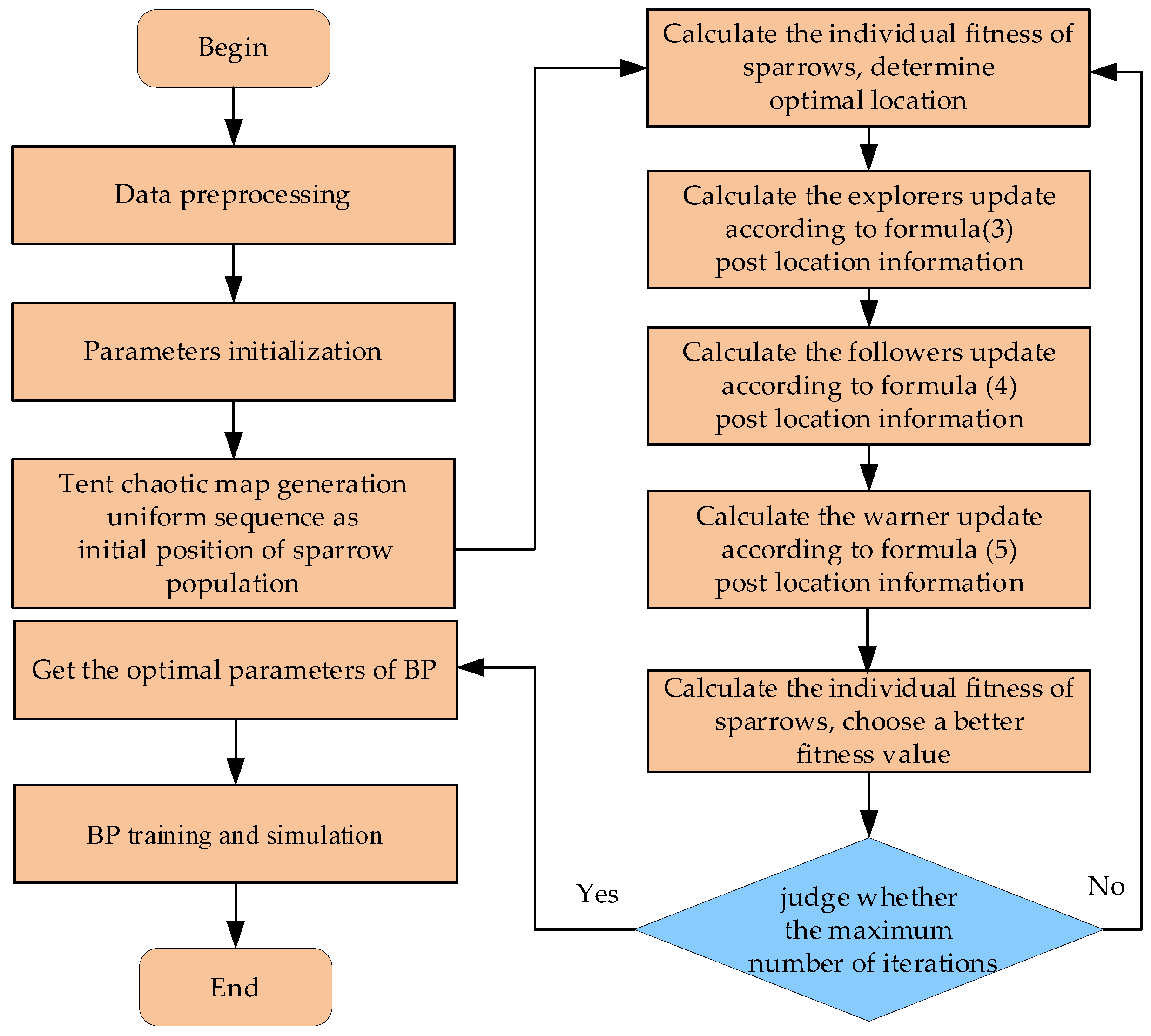
3.2.2. Tent Chaotic Mapping SSA
4. Membrane Fouling Prediction Model
4.1. Selection of Variables
4.2. Principal Component Analysis
4.3. Establishment of Tent-SSA-BP Prediction Model
4.4. Evaluating Indicator
- (1)
- Mean absolute percentage (MAPE)
- (2)
- Root mean square error (RMSE)
- (3)
- Mean absolute error (MAE)
5. Experiment and Simulation
5.1. Improved Algorithm Performance Test
5.1.1. Benchmark Function
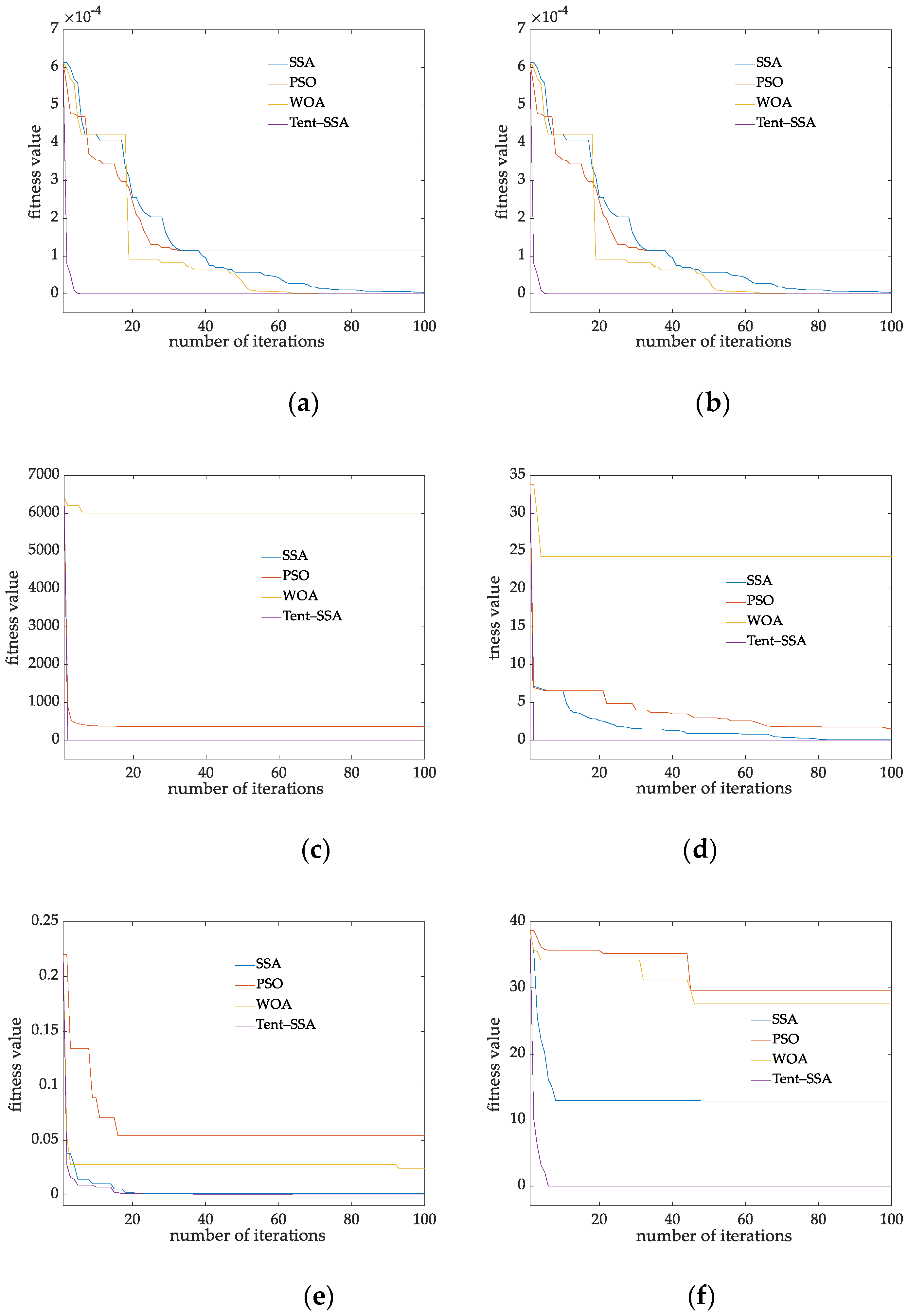
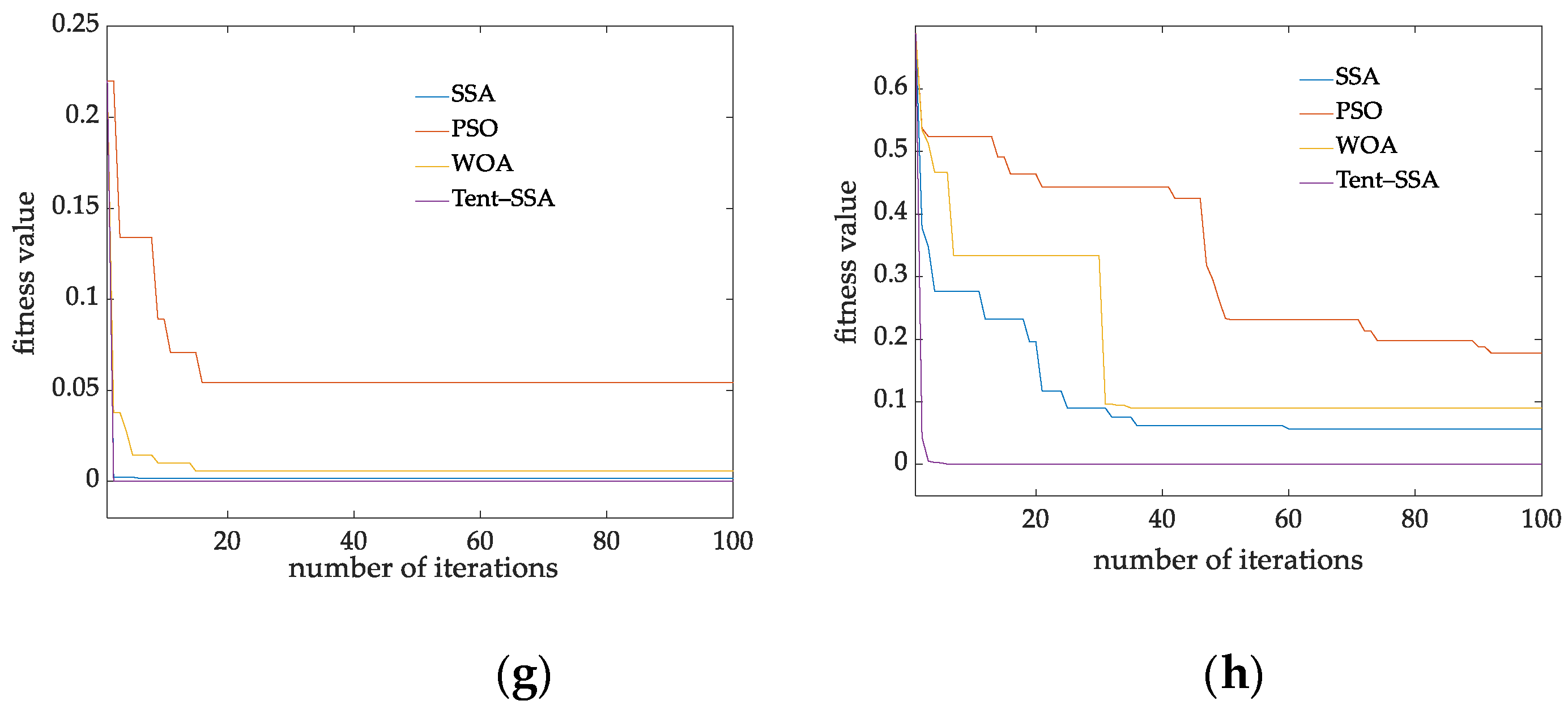
5.1.2. Comparison of Different Intelligent Optimization Algorithms
5.2. Experimental Results and Analysis
- (1)
- Comparison of results before and after improving optimization algorithm.
- (2)
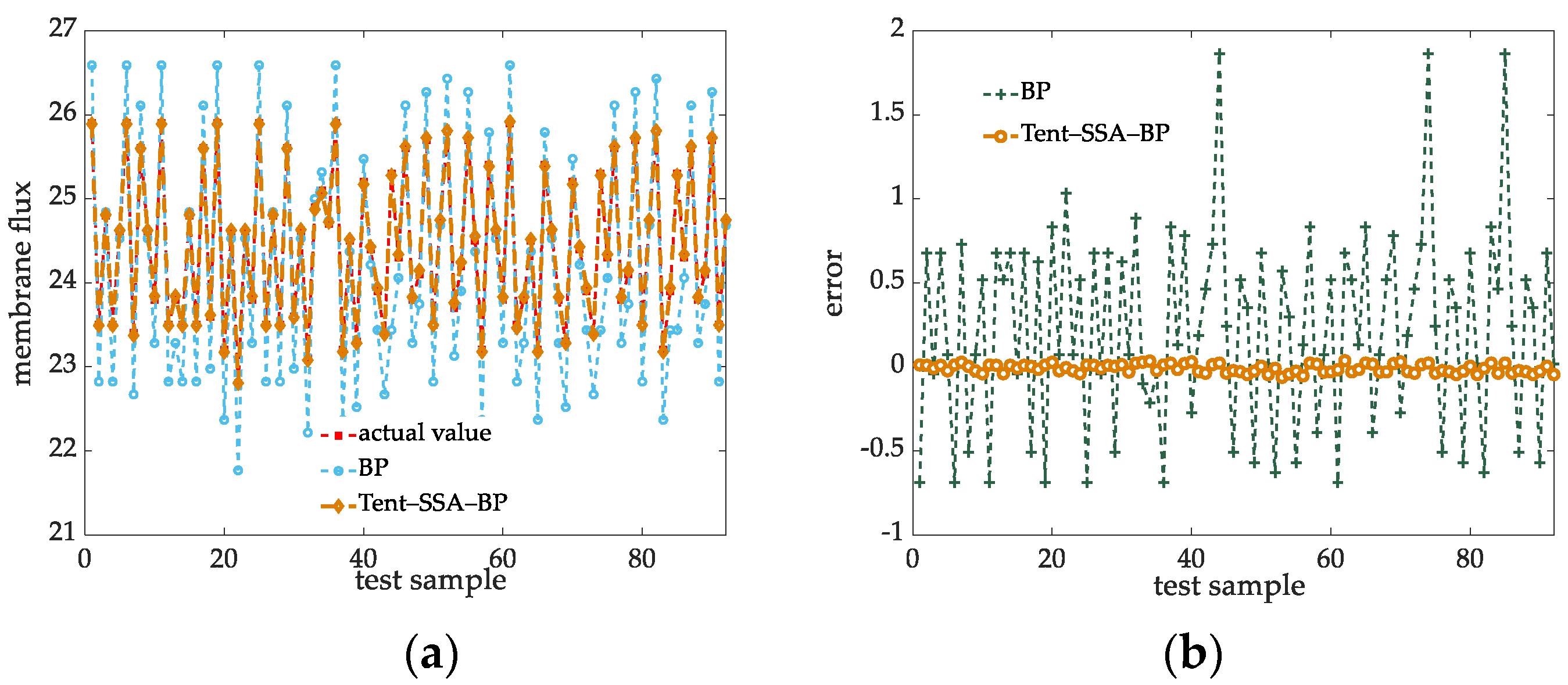
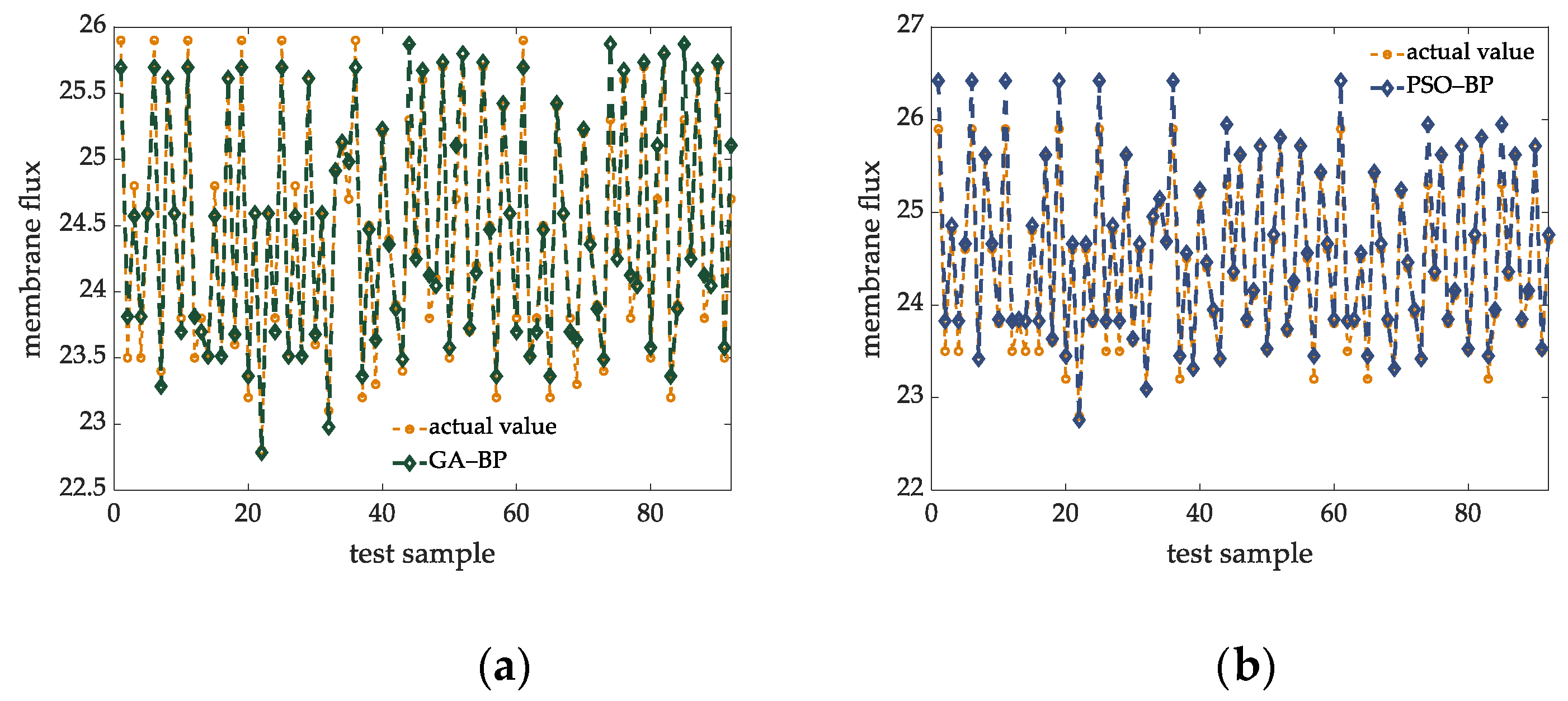
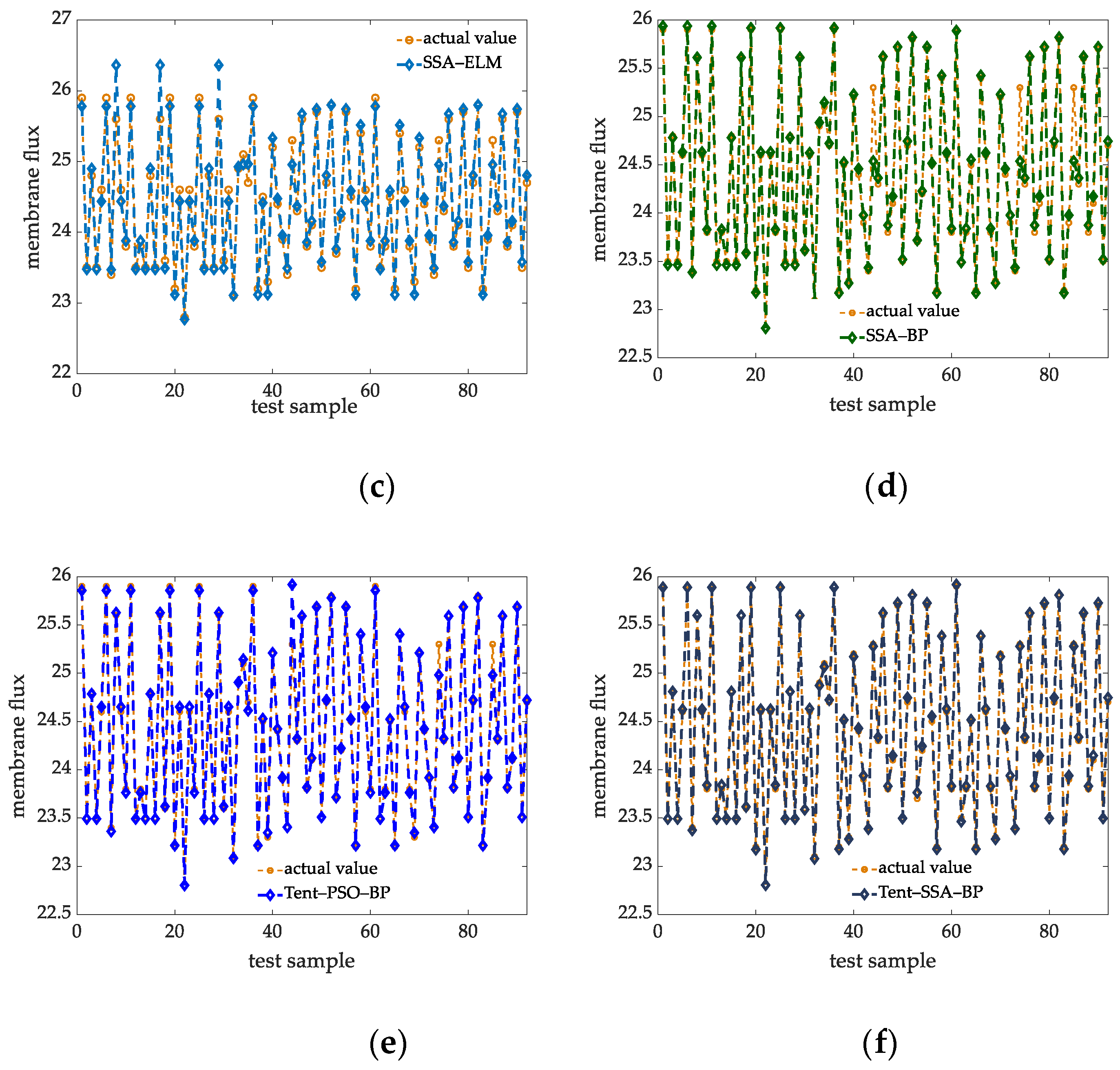
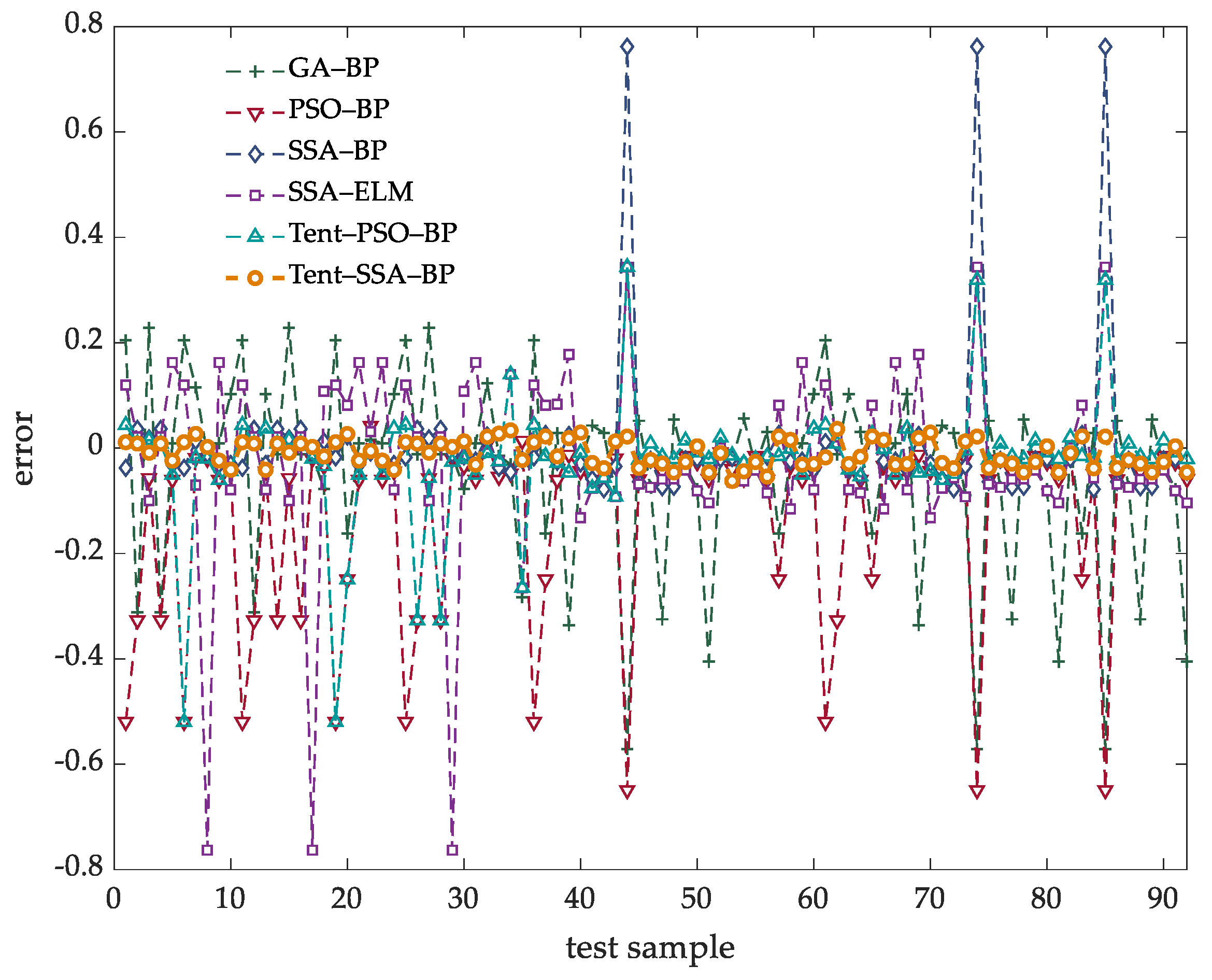
- Prediction accuracy of different soft measurement models
- (3)
- Variable noise membrane flux prediction results and analysis with different prediction methods
6. Conclusions
- (1)
- We use PCA to reduce the initial auxiliary variables. At the same time, we improve the efficiency of the algorithm and reduce the probability of over-fitting. In order to solve the problem that the diversity of population is reduced and the local optimal solution is easily trapped in the later stage of the optimization algorithm, we introduce the tent chaotic map to improve the uniformity of initial population distribution and the ability of the algorithm to find the global optimal solution. Tent-SSA-BP can find the global optimal solution more easily and quickly.
- (2)
- Based on the Tent-SSA-BP method proposed in this article, the prediction model of membrane flux in membrane fouling, whether it is the training speed or prediction accuracy of the model, shows better performance than other methods (GA-BP, PSO-BP, SSA-ELM, SSA-BP, Tent-PSO-BP), which is more suitable for the prediction model of membrane flux. This also provides a possibility for the complete data prediction of subsequent membrane components and membrane fouling requirements.
- (3)
- In the future research work, data are an important basis and resource for large data prediction research. Therefore, it is of strategic significance to establish a large database of membrane fouling standards for membrane components, to explore deep migration learning methods for predicting technological innovation, and to reveal the evolution mechanism of membrane fouling.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qin, X.; Gao, F.; Chen, G. Wastewater quality monitoring system using sensor fusion and machine learning techniques. Water Res. 2012, 46, 1133–1144. [Google Scholar] [CrossRef] [PubMed]
- Wiest, L.; Gosset, A.; Fildier, A.; Libert, C.; Herve, M.; Sibeud, E.; Giroud, B.; Vulliet, E.; Bastide, T.; Polome, P. Occurrence and removal of emerging pollutants in urban sewage treatment plants using LC-QToF-MS suspect screening and quantification. Sci. Total Environ. 2021, 774, 145779. [Google Scholar] [CrossRef]
- Tsui, T.H.; Zhang, L.; Zhang, J.X.; Dai, Y.J.; Tong, Y.W. Engineering interface between bioenergy recovery and biogas desulfurization: Sustainability interplays of biochar application. Renew. Sust. Energy Rev. 2022, 157, 112053. [Google Scholar] [CrossRef]
- Tsui, T.H.; Zhang, L.; Zhang, J.X.; Dai, Y.J.; Tong, Y.W. Methodological framework for wastewater treatment plants delivering expanded service: Economic tradeoffs and technological decisions. Sci. Total Environ. 2022, 823, 153616. [Google Scholar] [CrossRef]
- Deb, A.; Gurung, K.; Rumky, J.; Sillanpaa, M.; Manttari, M.; Kallioinen, M. Dynamics of microbial community and their effects on membrane fouling in an anoxic-oxic gravity-driven membrane bioreactor under varying solid retention time: A pilot-scale study. Sci. Total Environ. 2022, 807, 150878. [Google Scholar] [CrossRef]
- Du, X.J.; Shi, Y.K.; Jegatheesan, V.; Haq, I. A Review on the Mechanism, Impacts and Control Methods of Membrane Fouling in MBR System. Membranes 2020, 10, 24. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.K.; Wang, Z.W.; Du, X.J.; Gong, B.; Jegatheesan, V.; Haq, U.I. Recent advances in the prediction of fouling in membrane bioreactors. Membranes 2021, 11, 381. [Google Scholar] [CrossRef]
- Han, H.Y.; Li, C.Q. Research on intelligent simulation and prediction method of MBR membrane fouling. Comput. Meas. Control. 2013, 21, 673156. [Google Scholar]
- Chellam, S. Artificial neural network model for transient crossflow microfiltration of polydispersed suspensions. Membranes 2005, 258, 35–42. [Google Scholar] [CrossRef]
- Al-Zoubi, H.; Hilal, N.; Darwish, N.A.; Mohammad, A.W. Rejection and modelling of sulphate and potassium salts by nanofiltration membranes: Neural network and Spiegler-Kedem model. Desalination 2006, 206, 42–60. [Google Scholar] [CrossRef]
- Martín-Pascual, J.; Leyva-Díaz, J.C.; López-López, C.; Munñio, M.M.; Hontoria, E.; Poyatos, J.M. Effects of temperature on the permeability and critical flux of the membrane in a moving bed membrane bioreactor. Desalin. Water Treat. 2015, 53, 3439–3448. [Google Scholar] [CrossRef]
- Hwang, B.K.; Lee, W.N.; Park, P.K. Effect of membrane fouling reducer on cake structure and membrane permeability in membrane bioreactor. Membranes 2007, 288, 149–156. [Google Scholar] [CrossRef]
- Han, H.G.; Zhang, S.; Qiao, J.F. Soft-sensor Method for Permeability of the Membrane Bio-Reactor Based on Recurrent Radial Basis Function Neural Network. J. Beijing Univ. Technol. 2017, 43, 1168–1174. [Google Scholar]
- Liu, Z.F.; Pan, D.; Wang, J.H.; Yang, S.X. The film pollution forecast of PSO-BP neural network in MBR technology. J. Beijing Univ. Technol. 2012, 38, 126–131. [Google Scholar]
- Mirbagheri, S.A.; Bagheri, M.; Bagheri, Z.; Kamarkhani, A.M. Evaluation and prediction of membrane fouling in a submerged membrane bioreactor with simultaneous upward and downward aeration using artificial neural network-genetic algorithm. Process Saf. Environ. 2015, 96, 111–124. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. Open Access J. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Liu, Y.L. Study on prediction model of coal gangue subgrade settlement based on SSA-SVR. J. Hebei Univ. Geosci. 2021, 44, 99–104. [Google Scholar]
- Liu, D.; Wei, X.; Wang, W.Q.; Ye, J.H.; Ren, J. Short-term wind power prediction based on SSA-ELM. Smart Power. 2021, 49, 53–59. [Google Scholar]
- Yoon, S.H. Membrane Bioreactor Processes (Advances in Water and Wastewater Transport and Treatment), 1st ed.; CRC Press: Boca Raton, FL, USA, 2020; pp. 55–67. [Google Scholar]
- Chen, J.H.; Dong, C.; He, G.R.; Zhang, X.Y. A method for indoor Wi-Fi location based on improved back propagation neural network. Turk. J. Electr. Eng. Comput. Sci. 2019, 27, 2511–2525. [Google Scholar] [CrossRef]
- Zhou, J.; Ma, Q.R. Establishing a Genetic Algorithm-Back Propagation model to predict the pressure of girdles and to determine the model function. Text Res. J. 2020, 90, 2564–2578. [Google Scholar]
- Yan, S.Q.; Yang, P.; Zhu, D.L.; Zheng, W.L.; Wu, F.X. Improved Sparrow Search Algorithm Based on Iterative Local Search. Comput. Intel. Neurosc. 2022, 2021, 6860503. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.L.; Yousefi, N. Optimal parameter identification of PEMFC stacks using Adaptive Sparrow Search Algorithm. Int. J. Hydrogen Energy 2021, 46, 9541–9552. [Google Scholar] [CrossRef]
- Liu, Q.L.; Zhang, Y.; Li, M.Q.; Zhang, Z.Y.; Cao, N.; Shang, J.L. Multi-UAV Path Planning Based on Fusion of Sparrow Search Algorithm and Improved Bioinspired Neural Network. IEEE Access 2021, 9, 124670–124681. [Google Scholar] [CrossRef]
- Yang, X.X.; Liu, J.; Liu, Y.; Xu, P.; Yu, L.; Zhu, L.; Chen, H.Y.; Deng, W. A Novel Adaptive Sparrow Search Algorithm Based on Chaotic Mapping and T-Distribution Mutation. Appl. Sci. 2022, 11, 11192. [Google Scholar] [CrossRef]
- Yuan, J.H.; Zhao, Z.W.; Liu, Y.P.; He, B.L.; Wang, L.; Xie, B.B.; Gao, Y.L. DMPPT Control of Photovoltaic Microgrid Based on Improved Sparrow Search Algorithm. IEEE Access 2021, 9, 16623–16629. [Google Scholar] [CrossRef]
- Kuang, F.J.; Jin, Z.; Xu, W.H.; Zhang, S.Y. Tent chaotic artificial bee colony and particle swarm hybrid algorithm. Control Decis. 2015, 30, 839–847. [Google Scholar]
- Zhang, N.; Zhao, Z.D.; Bao, X.A.; Qian, J.Y. An improved chaotic gravitational search algorithm based on Tent. Control Decis. 2020, 35, 893–900. [Google Scholar]
- Zhang, W.K.; Liu, S.; Ren, C.H. Improved Sparrow Search Algorithm with Mixed Strategies. Comput. Eng. Appl. 2021, 57, 74–82. [Google Scholar]
- Dong, J.; Dou, Z.H.; Si, S.Q.; Wang, Z.C.; Liu, L.X. Optimization of Capacity Configuration of Wind–Solar–Diesel–Storage Using Improved Sparrow Search Algorithm. J. Electr. Eng. Technol. 2021, 17, 1–14. [Google Scholar] [CrossRef]
- Zeng, L.; Lei, S.M.; Wang, S.S.; Chang, Y.F. Ultra-short-term wind power prediction method based on OVMD-SSA-DELM-GM model. Power Grid Technol. 2021, 45, 4701–4710. [Google Scholar]
- Lyu, X.; Mu, X.D.; Zhang, J.; Wang, Z. Chaos sparrow search optimization algorithm. J. Beijing Univ. Aeronaut. Astronaut. 2021, 47, 1712–1720. [Google Scholar]
- Shi, Y.K.; Wang, Z.W.; Du, X.J.; Gong, B.; Lu, Y.R.; Li, L. Membrane Fouling Diagnosis of Membrane Components Based on Multi-Feature Information Fusion. J. Membr. Sci. 2022, 657, 120670. [Google Scholar] [CrossRef]
- Shi, Y.K.; Wang, Z.W.; Du, X.J.; Ling, G.B.; Jia, W.C.; Lu, Y.R. Research on the membrane fouling diagnosis of MBR membrane module based on ECA-CNN. J. Environ. Chem. Eng. 2022, 10, 107649. [Google Scholar] [CrossRef]
- Fan, J.L.; Liu, H.B.; Xue, Z.Y.; Wang, J.X.; Wang, H.N.; Zhang, R.S. Research status of MBR membrane fouling based on artificial neural network. Membr. Sci. Technol. 2021, 41, 154–159. [Google Scholar]
- Li, J.X.; Guo, J.F.; Li, J.X. Effects of Organic Loading and Temperature on Membrane Fouling in Membrane Bioreactor. Technol. Water Treat. 2020, 46, 45–49. [Google Scholar]
- Beattie, J.R.; Esmonde-White, F.W.L. Exploration of Principal Component Analysis: Deriving Principal Component Analysis Visually Using Spectra. Appl. Spectrosc. 2021, 75, 361–375. [Google Scholar] [CrossRef]
- Du, B.Y.; Kong, X.Y.; Luo, J.Y. Weighted Rules for Principal Components Extraction Information Criteria. Acta Autom. Sin. 2022, 47, 2815–2822. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Principal Component | Eigenvalues | Contribution Rate | Cumulative Contribution Rate |
|---|---|---|---|
| 2.331 | 53.752 | 53.752 | |
| 1.252 | 21.121 | 74.873 | |
| 1.007 | 14.435 | 89.308 | |
| 0.774 | 3.704 | 93.012 |
| Test Function | Range of Values | Dimension | Optimum Solution |
|---|---|---|---|
| Benchmark Function | SSA | Tent-SSA | PSO | WOA | ||||
|---|---|---|---|---|---|---|---|---|
| Mean | Std. Deviation | Mean | Std. Deviation | Mean | Std. Deviation | Mean | Std. Deviation | |
| 1.73 × 10−06 | 2.66 × 10−05 | 2.28 × 10−164 | 0 | 5.26 × 10−04 | 7.32 × 10−04 | 2.01 × 10−27 | 1.11 × 10−26 | |
| 6.32 × 10−25 | 1.35 × 10−24 | 2.04 × 10−184 | 0 | 2.35 × 10−03 | 1.61 × 10−03 | 2.44 × 10−19 | 4.56 × 10−19 | |
| −1.39 × 10−06 | 2.73 × 10−05 | 8.02 × 10−179 | 0 | 6.52 × 10+02 | 4.83 × 10+02 | 6.55 × 10+03 | 1.76 × 10+03 | |
| −3.74 × 10−06 | 1.02 × 10−05 | 0 | 0 | 6.13 × 10+00 | 2.25 × 10+00 | 6.36 × 10+01 | 2.53 × 10+01 | |
| 2.43 × 10−02 | 1.01 × 10−01 | 2.04 × 10−02 | 2.36 × 10−03 | 4.84 × 10−02 | 1.74 × 10−02 | 6.13 × 10−03 | 8.20 × 10−03 | |
| 9.95 × 10−02 | 1.13 × 10+00 | −1.04 × 10−27 | 1.39 × 10−28 | 6.22 × 10+01 | 1.75 × 10−01 | 6.04 × 10+00 | 2.00 × 10+01 | |
| −1.11 × 10−07 | 3.31 × 10−06 | 2.04 × 10−20 | 2.64 × 10−20 | 8.04 × 10−01 | 8.01 × 10−01 | 8.25 × 10−06 | 2.52 × 10−06 | |
| 9.37 × 10−03 | 8.33 × 10−03 | 4.85 × 10−11 | 1.58 × 10−10 | 8.26 × 10−01 | 8.83 × 10−01 | 9.28 × 10−02 | 6.24 × 10−02 | |
| Model | EVA | ||
|---|---|---|---|
| MAPE/% | RMSE | MAE | |
| BP | 0.0216 | 0.3917 | 0.5148 |
| GA-BP | 0.0051 | 0.0344 | 0.1249 |
| PSO-BP | 0.0053 | 0.0484 | 0.1333 |
| SSA-ELM | 0.0046 | 0.0317 | 0.1157 |
| SSA-BP | 0.0024 | 0.0204 | 0.0574 |
| Tent-PSO-BP | 0.0025 | 0.0211 | 0.0606 |
| Tent-SSA-BP | 0.0007 | 0.0009 | 0.0226 |
| Diagnostic Method | SNR/dB | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| BP | 46.52% | 63.82% | 45.23% |
| GA-BP | 82.51% | 90.76% | 79.96% |
| PSO-BP | 84.67% | 89.26% | 80.42% |
| SSA-ELM | 82.43% | 88.17% | 78.17% |
| SSA-BP | 90.26% | 92.28% | 86.73% |
| Tent-PSO-BP | 88.36% | 90.23% | 85.18% |
| Tent-SSA-BP | 93.74% | 94.16% | 91.22% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ling, G.; Wang, Z.; Shi, Y.; Wang, J.; Lu, Y.; Li, L. Membrane Fouling Prediction Based on Tent-SSA-BP. Membranes 2022, 12, 691. https://doi.org/10.3390/membranes12070691
Ling G, Wang Z, Shi Y, Wang J, Lu Y, Li L. Membrane Fouling Prediction Based on Tent-SSA-BP. Membranes. 2022; 12(7):691. https://doi.org/10.3390/membranes12070691
Chicago/Turabian StyleLing, Guobi, Zhiwen Wang, Yaoke Shi, Jieying Wang, Yanrong Lu, and Long Li. 2022. "Membrane Fouling Prediction Based on Tent-SSA-BP" Membranes 12, no. 7: 691. https://doi.org/10.3390/membranes12070691