
Analysis of a Fractional-Order COVID-19 Epidemic Model with Lockdown

Abstract
:1. Introduction and Preliminaries
- 1.
- .
- 2.
- 3.
- .
- 4.
- .
- 5.
- , for .
- 6.
- , for .
2. Model Formulation
3. Equilibrium Points and Basic Reproduction Number
4. Local and Global Asymptotic Stability of the Disease-Free and Endemic Equilibrium Points
5. Approximate Solution
6. Numerical Simulations and Examples
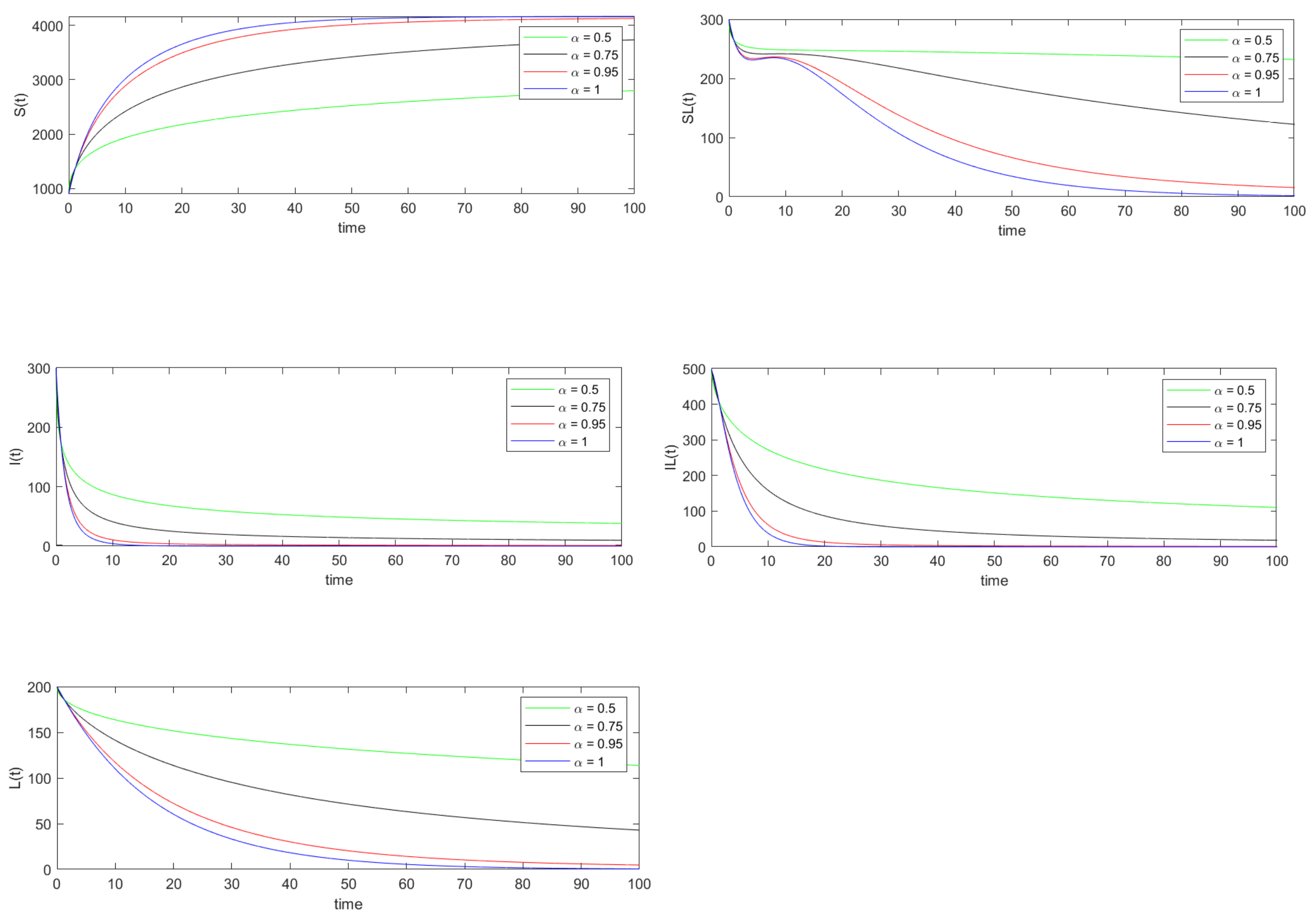
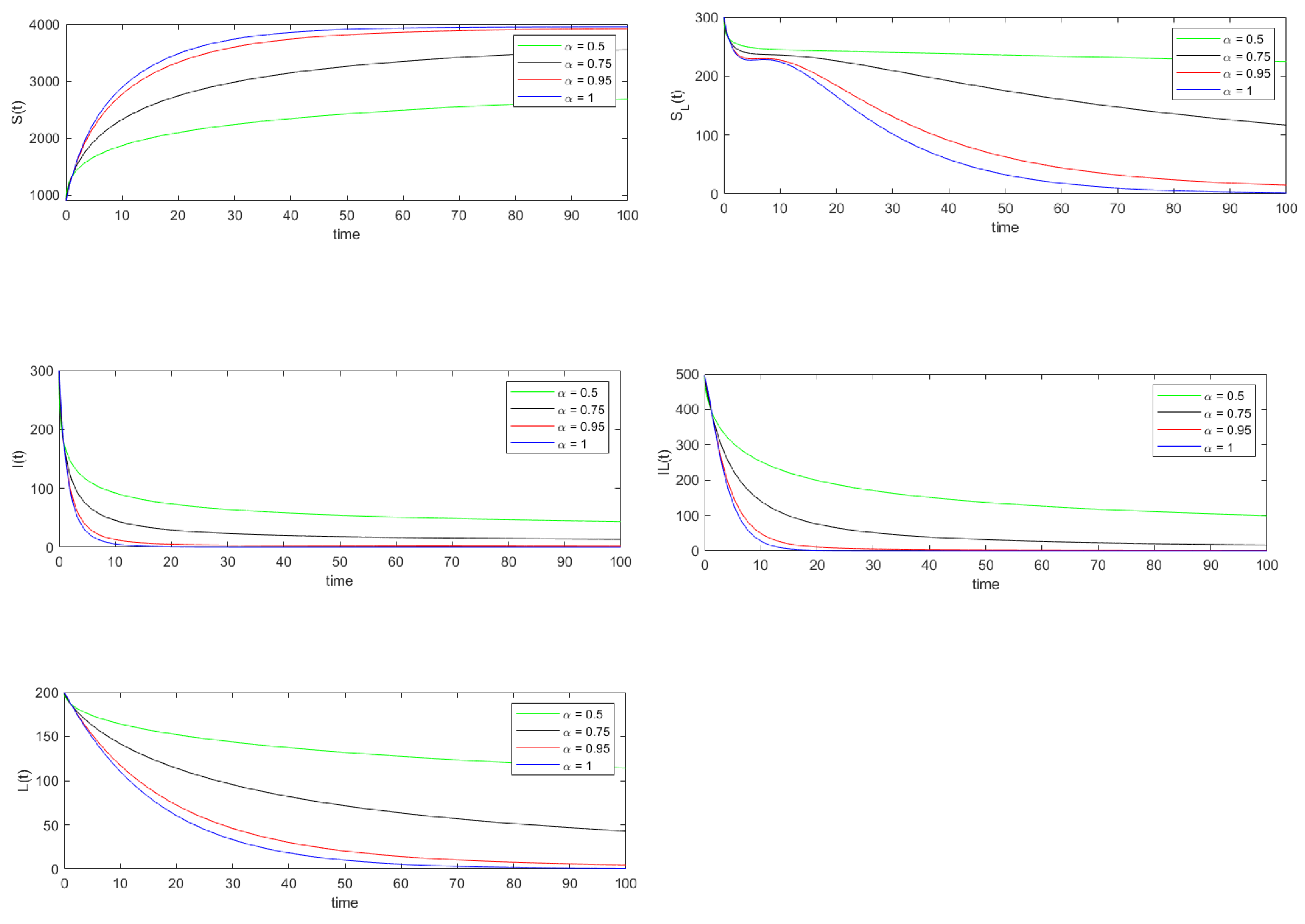
6.1. Exact and Approximated Solutions of System (8) When
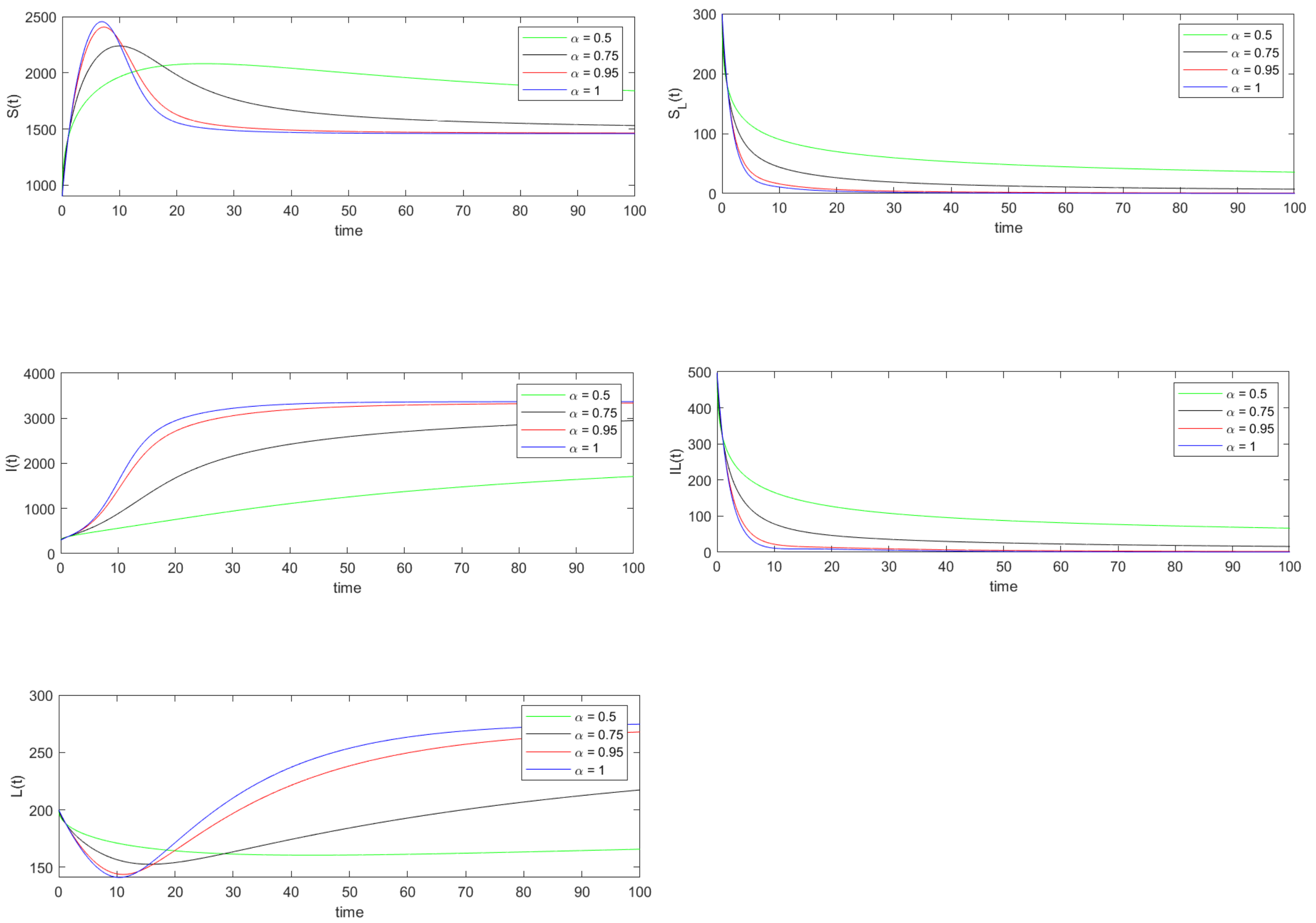
6.2. Exact and Approximated Solutions of System (8) When
7. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Baleanu, D.; Kai, D.; Enrico, S. Fractional Calculus: Models and Numerical Methods; World Scientific: Singapore, 2012. [Google Scholar]
- Djordjevic, J.; Silva, C.J.; Torres, D.F.M. A stochastic SICA epidemic model for HIV transmission. Appl. Math. Lett. 2018, 84, 168–175. [Google Scholar] [CrossRef] [Green Version]
- Hajji, M.; Al-Mdallal, Q. Numerical simulations of a delay model for immune system-tumor interaction. Sultan Qaboos Univ. J. Sci. [SQUJS] 2018, 23, 19–31. [Google Scholar] [CrossRef] [Green Version]
- Ndairou, F.; Area, I.; Nieto, J.J.; Silva, C.J.; Torres, D.F.M. Mathematical modeling of zika disease in pregnant women and newborns with microcephaly in Brazil. Math. Meth. Appl. Sci. 2018, 41, 8929–8941. [Google Scholar] [CrossRef] [Green Version]
- Rachah, A.; Torres, D.F.M. Dynamics and optimal control of ebola transmission. Math. Comput. Sci. 2016, 10, 331–342. [Google Scholar] [CrossRef] [Green Version]
- Rihan, F.A.; Al-Mdallal, Q.M.; AlSakaji, H.J.; Hashish, A. A fractional-order epidemic model with time-delay and nonlinear incidence rate. Chaos Solitons Fractals 2019, 126, 97–105. [Google Scholar] [CrossRef]
- Ahmed, N.; Korkmaz, A.; Rafiq, M.; Baleanu, D.; Alshomrani, A.S.; Rehman, M.A.; Iqbal, S. A novel time efficient structure-preserving splitting method for the solution of two-dimensional reaction-diffusion systems. Adv. Differ. Equ. 2020, 2020, 197. [Google Scholar] [CrossRef]
- Arafa, A.A.M.; Rida, S.Z.; Khalil, M. Solutions of fractional-order model of childhood diseases with constant vaccination strategy. Math. Sci. Lett. 2012, 1, 17–23. [Google Scholar] [CrossRef]
- Baleanu, D.; Mohammadi, H.; Rezapour, S. A mathematical theoretical study of a particular system of caputo fabrizio fractional differential equations for the rubella disease model. Adv. Differ. Equ. 2020, 2020, 184. [Google Scholar] [CrossRef]
- Haq, F.; Shah, K.; Rahman, G.; Shahzad, M. Numerical analysis of fractional order model of HIV-1 infection of CD4+ t-cells. Comput. Method Differ. Equ. 2017, 5, 1–11. [Google Scholar]
- Kumar, D.; Singh, J.; Rathore, S. Application of homotopy analysis transform method to fractional biological population model. Rom. Rep. Phys. 2012, 65, 63–75. [Google Scholar]
- Lia, Y.; Haq, F.; Shah, K.; Shahzad, M.; Rahman, G. Numerical analysis of fractional order pine wilt disease model with bilinear incident rate. J. Math. Comput. Sci. 2017, 17, 420–428. [Google Scholar] [CrossRef] [Green Version]
- Magin, R. Fractional Calculus in Bioengineering; Begell House Publishers: Redding, CT, USA, 2004. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1998. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives; Gordon and Breach Science Publishers: Yverdon-les-Bains, Switzerland, 1993; Volume 1. [Google Scholar]
- Aba Oud, M.A.A.; Ali, A.; Alrabaiah, H.; Ullah, S.; Khan, M.A. A fractional order mathematical model for COVID-19 dynamics with quarantine, isolation, and environmental viral load. Adv. Differ. Equ. 2021, 2021, 106. [Google Scholar] [CrossRef]
- Ahmed, I.; Baba, I.A.; Yusuf, A.; Kumam, P.; Kumam, W. Analysis of Caputo fractional-order model for COVID-19 with lockdown. Adv. Differ. Equ. 2020, 2020, 394. [Google Scholar] [CrossRef]
- Abdo, M.S.; Shah, K.; Wahash, H.A.; Panchal, S.K. On a comprehensive model of thenovel coronavirus (COVID-19) under mittag-leffler derivative. Chaos Solitons Fractals 2020, 135, 109867. [Google Scholar] [CrossRef]
- Borah, M.; Roy, K.B.; Kapitaniak, T.; Rajagopal, K.; Volos, C. A revisit to the past plague epidemic (India) versus the present COVID-19 pandemic: Fractional-order chaotic. models and fuzzy logic control. Eur. Phys. J. Spec. Top. 2022, 231, 905–919. [Google Scholar] [CrossRef]
- Bahloul, M.A.; Chahid, A.; Laleg-Kirati, T.-M. Fractional-order SEIQRDP model for simulating the dynamics of COVID-19 epidemic. IEEE Open J. Eng. Med. Biol. 2020, 1, 249–256. [Google Scholar] [CrossRef]
- Debbouche, N.; Ouannas, A.; Batiha, I.M.; Grassi, G. Chaotic dynamics in a novel COVID-19 pandemic model described by commensurate and incommensurate fractional-order derivatives. Nonlinear Dyn. 2022, 109, 33–45. [Google Scholar] [CrossRef]
- Li, X.-P.; Bayatti, H.A.; Din, A.; Zeb, A. A vigorous study of fractional-order model via ABC derivatives. Results Phys. 2021, 29, 104737. [Google Scholar] [CrossRef]
- Khan, M.A.; Atangana, A. Modeling the dynamics of novel coronavirus (2019-NCOV) with fractional derivative. Alex. Eng. J. 2020, 59, 2379–2389. [Google Scholar] [CrossRef]
- Shah, K.; Abdeljawad, T.; Mahariq, I.; Jarad, F. Qualitative analysis of a mathematical model in the time of COVID-19. Biomed Res. Int. 2020, 2020, 5098598. [Google Scholar] [CrossRef]
- Zeb, A.; Atangana, A.; Khan, Z.A.; Djillali, S. A robust study of a piecewise fractional order COVID-19 mathematical model. Alex. J. Eng. 2022, 61, 5649–5665. [Google Scholar] [CrossRef]
- Zeb, A.; Kumar, P.; Erturk, V.S.; Sitthiwirattham, T. A new study on two different vaccinated fractional-order COVID-19 models via numerical algorithms. J. King Saud Univ.-Sci. 2022, 34, 101914. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Zeb, A.; Egbelowo, O.F.; Erturk, V.S. Dynamics of a fractional order mathematical model for COVID-19 epidemic. Adv. Differ. Equ. 2020, 2020, 420. [Google Scholar] [CrossRef] [PubMed]
- El-Ajou, A.; Abu Arqub, O.; Al Zhour, Z.; Momani, S. New results on fractional power series: Theories and applications. Entropy 2013, 15, 5305–5323. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 1–13. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with non-local and non-singular kernel. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef] [Green Version]
- Hattaf, K. A new generalized definition of fractional derivative with non-singular kernel. Computation 2020, 8, 49. [Google Scholar] [CrossRef]
- Gorenflo, R.; Kilbas, A.A.; Mainardi, F.; Rogosin, S.V. Mittag-Leffler Functions, Related Topics and Applications; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Baba, I.A.; Yusuf, A.; Nisar, K.S.; Abdel-Aty, A.-H.; Nofal, T.A. Mathematical model to assess the imposition of lockdown during COVID-19 pandemic. Results Phys. 2021, 20, 103716. [Google Scholar] [CrossRef] [PubMed]
- Lin, W. Global existence theory and chaos control of fractional differential equations. J. Math. Anal. Appl. 2007, 323, 709–726. [Google Scholar] [CrossRef] [Green Version]
- Diekmann, O.; Heesterbeek, J.A.P.; Metz, J.A.P. On the definition and the computation of the basic reproduction ratio R0 in models for infectious diseases in heterogeneous populations. J. Math. Biol. 1990, 28, 365–382. [Google Scholar] [CrossRef] [Green Version]
- Matignon, D. Stability Results for Fractional Differential Equations with Applications to Control Processing; Computational Engineering in Systems Applications: Lille, France, 1996; Volume 2, pp. 963–968. [Google Scholar]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef] [Green Version]
- Hattaf, K. On the stability and numerical scheme of fractional differential equations with application to biology. Computation 2022, 10, 97. [Google Scholar] [CrossRef]
- Delavari, H.; Baleanu, D.; Sadati, J. Stability analysis of Caputo fractional-order nonlinear systems revisited. Nonlinear Dyn. 2012, 67, 2433–2439. [Google Scholar] [CrossRef]
- Hattaf, K. Dynamics of a generalized fractional epidemic model of COVID-19 with carrier effect. Adv. Syst. Sci. Appl. 2022, 22, 36–48. [Google Scholar]
- Hasan, S.; Al-Zoubi, A.; Freihet, A.; Al-Smadi1, M.; Momani, S. Solution of fractional SIR epidemic Model using residual power series method. Appl. Math. Inf. Sci. 2019, 13, 153–161. [Google Scholar] [CrossRef]
- Yang, H.M.; Lombardi Junior, L.P.; Castro, F.F.M.; Yang, A.C. Mathematical modeling of the transmission of SARS-CoV-2—Evaluating the impact of isolation in São Paulo State (Brazil) and lockdown in Spain associated with protective measures on the epidemic of COVID-19. PLoS ONE 2021, 16, e0252271. [Google Scholar] [CrossRef]
- Rothe, C.; Schunk, M.; Sothmann, P.; Bretzel, G.; Froeschl, G.; Wallrauch, C.; Zimmer, T.; Thiel, V.; Janke, C.; Guggemos, W. Transmission of 2019-nCoV infection from an asymptomatic contact in Germany. N. Engl. J. Med. 2020, 382, 970–971. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description of the Parameters |
|---|---|
| Recruitment rate | |
| Infection contact rate | |
| Imposition of lockdown on susceptible group | |
| Imposition of lockdown on infected group | |
| Recovery rate of the infected group | |
| Recovery rate of the infected group under lockdown | |
| Death rate of the infected group | |
| Death rate of the infected group under lockdown | |
| d | Natural death rates |
| Rate of transfer of susceptible lockdown individuals to susceptible class | |
| Rate of transfer of susceptible lockdown individuals to infected class | |
| rate of implementation of the lockdown program | |
| rate of depletion of the lockdown program |
| Parameters | Description of the Parameters | Data Set 1 | Data Set 2 | Reference |
|---|---|---|---|---|
| Recruitment rate | 400 | 400 | [38,43] | |
| Infection contact rate | [44] | |||
| Imposition of lockdown on susceptible group | [38,43] | |||
| Imposition of lockdown on infected group | 0.002 | 0.002 | [38,43] | |
| Recovery rate of the infected group | 0.16979 | 0.16979 | [38,43] | |
| Recovery rate of the infected group under lockdown | 0.16979 | 0.16979 | [38,43] | |
| Death rate of the infected group | 0.03275 | 0.03275 | [44] | |
| Death rate of the infected group under lockdown | 0.03275 | 0.03275 | [44] | |
| d | Natural death rates | 0.096 | 0.06 | [38,43] |
| Rate of transfer of susceptible lockdown individuals to susceptible class | 0.2 | 0.52 | [38,43] | |
| Rate of transfer of susceptible lockdown individuals to infected class | 0.2 | [38,43] | ||
| rate of implementation of the lockdown program | [38,43] | |||
| rate of depletion of the lockdown program | 0.06 | 0.06 | [38,43] |
| S | ||||
| I | ||||
| L |
| S | ||||
| I | ||||
| L |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Denu, D.; Kermausuor, S. Analysis of a Fractional-Order COVID-19 Epidemic Model with Lockdown. Vaccines 2022, 10, 1773. https://doi.org/10.3390/vaccines10111773
Denu D, Kermausuor S. Analysis of a Fractional-Order COVID-19 Epidemic Model with Lockdown. Vaccines. 2022; 10(11):1773. https://doi.org/10.3390/vaccines10111773
Chicago/Turabian StyleDenu, Dawit, and Seth Kermausuor. 2022. "Analysis of a Fractional-Order COVID-19 Epidemic Model with Lockdown" Vaccines 10, no. 11: 1773. https://doi.org/10.3390/vaccines10111773