
Simulation Analysis of the Motion of Superparamagnetic Particles in Liquid-Phase Fluid under a Magnetic Field


Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
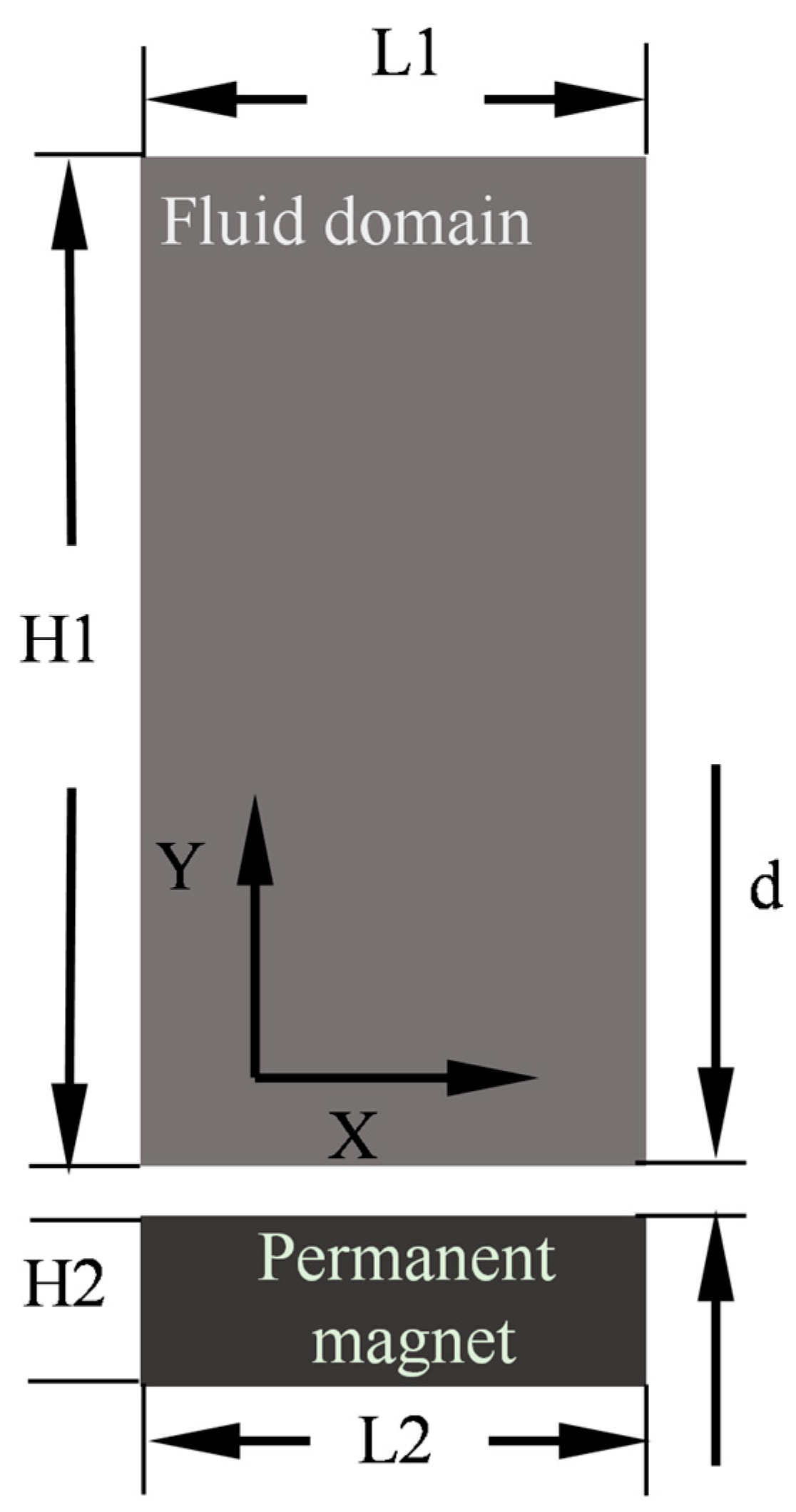
2.1. Geometric Models
2.2. Magnetic Field Distribution
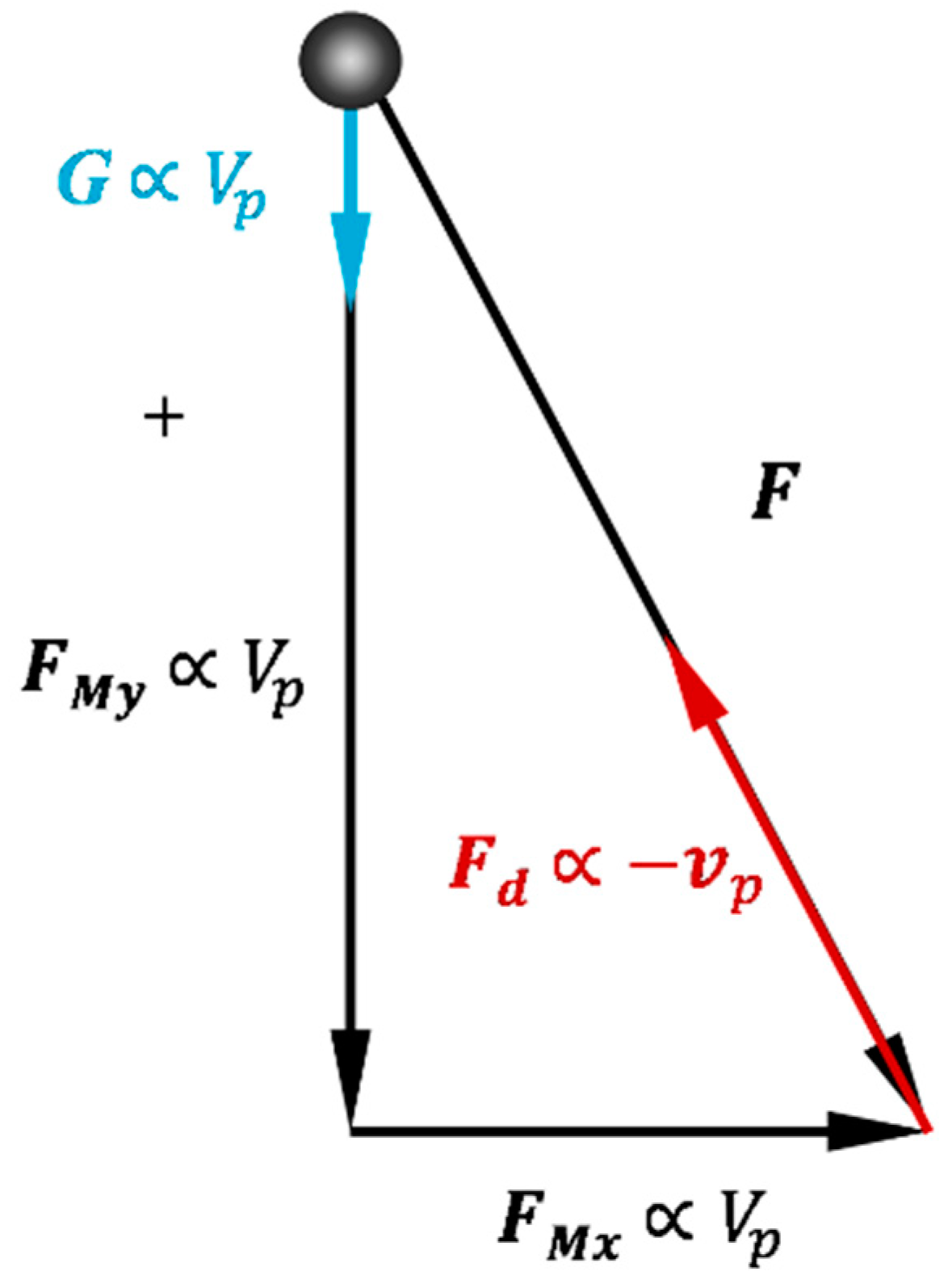
2.3. Mechanical Analysis of Magnetic Particle Motion
2.4. Magnetic Field Forces and Magnetization Models
3. Simulation Results
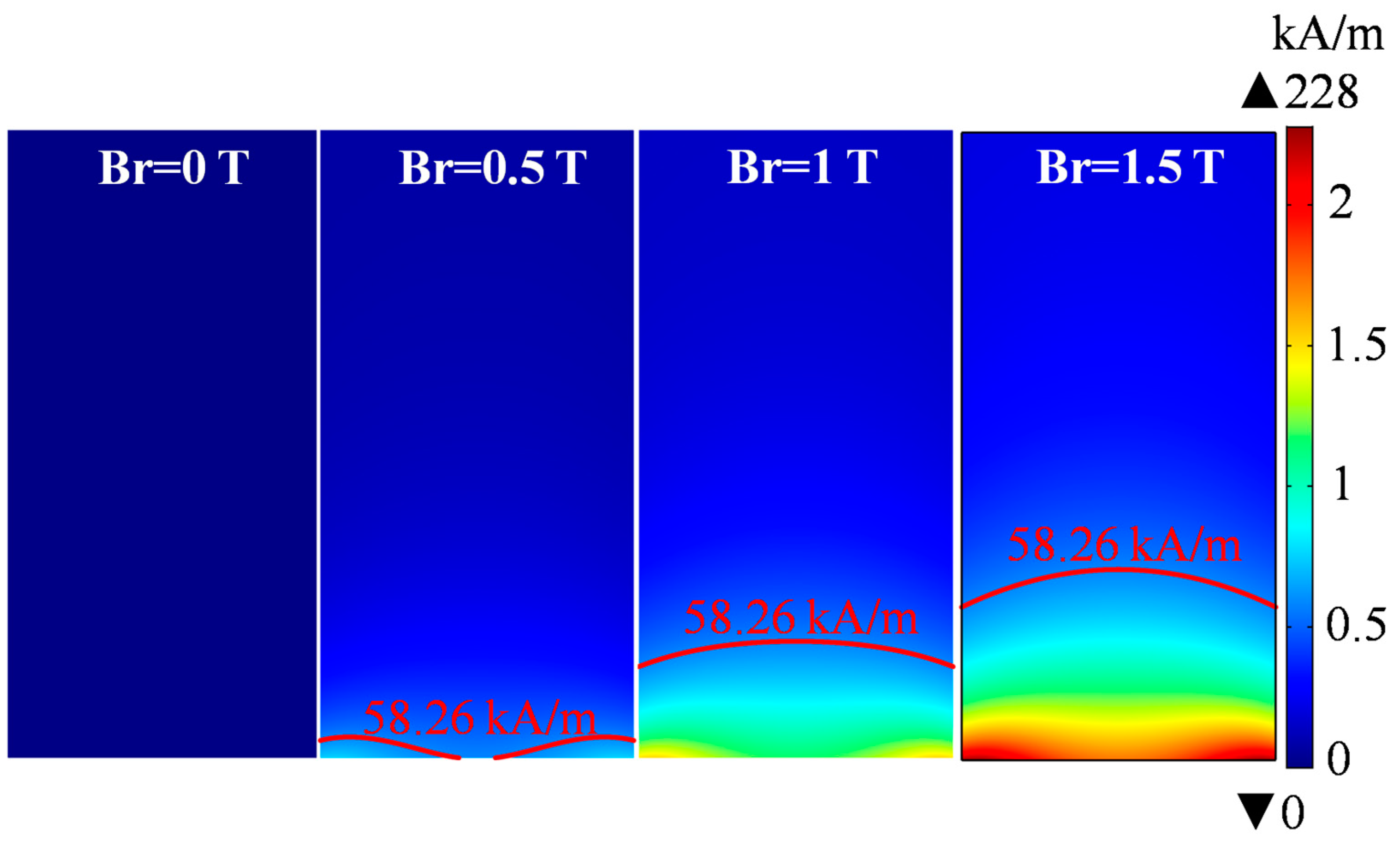
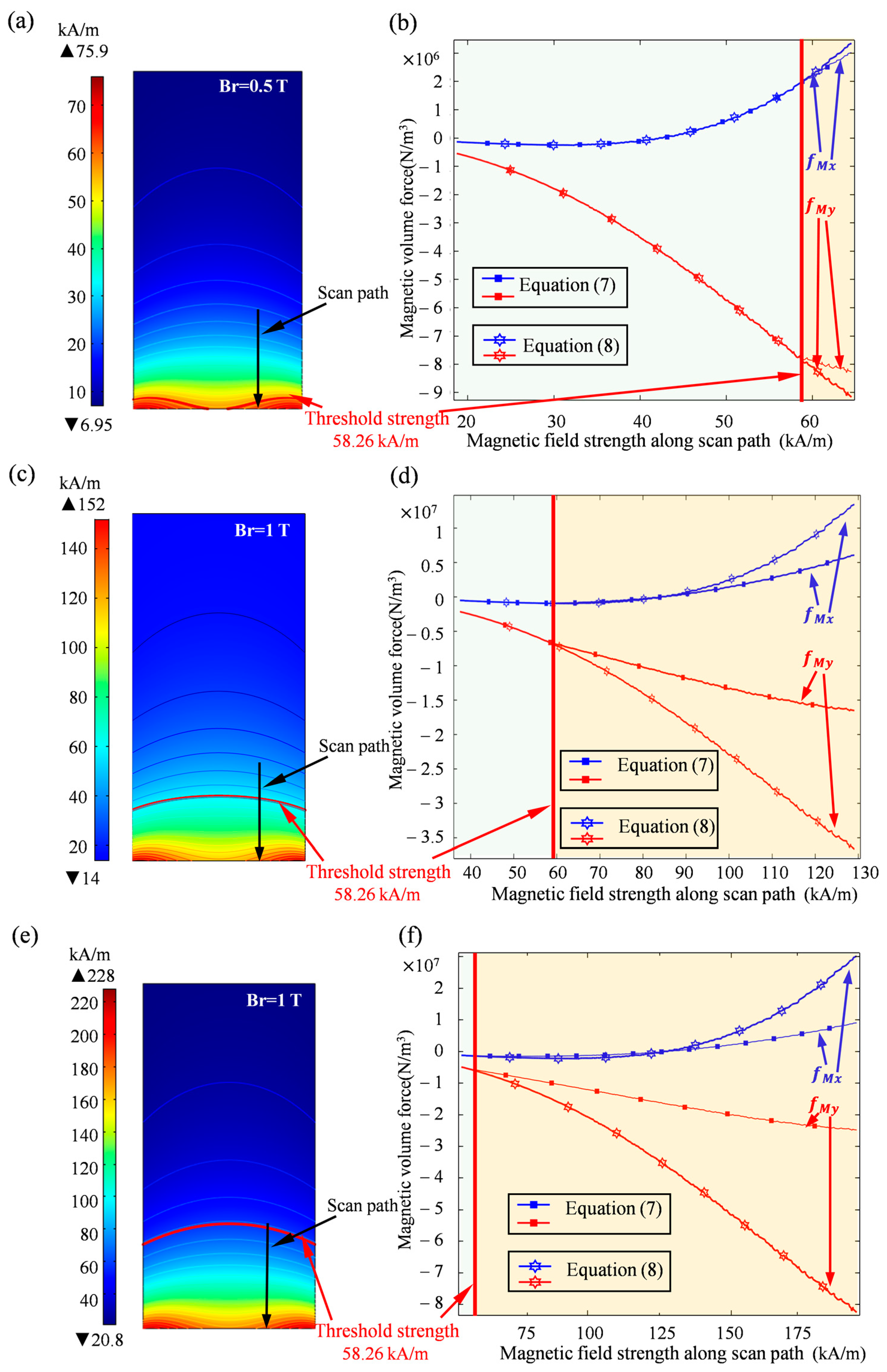
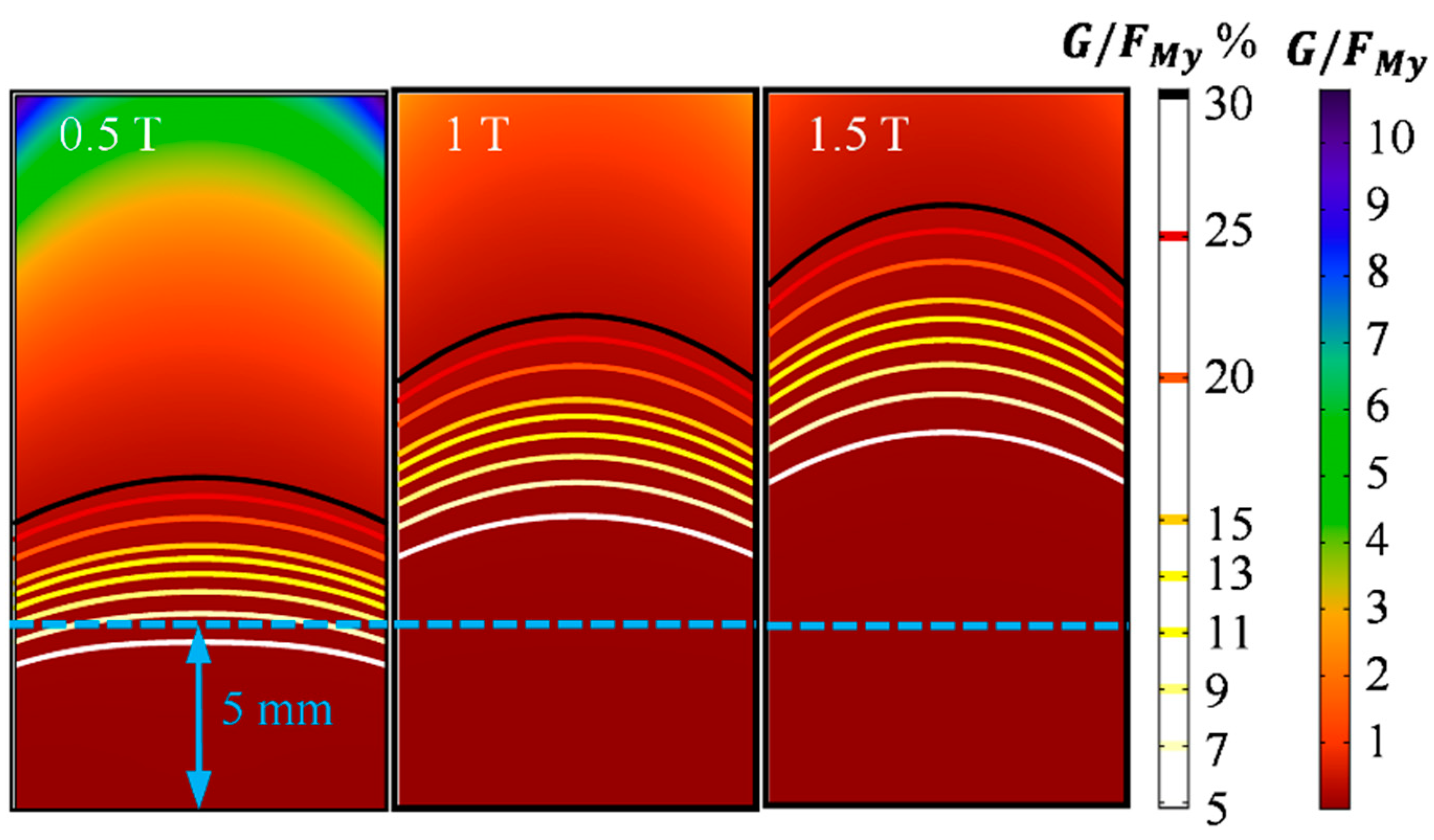
3.1. Magnetic Field Strength and Magnetic Volume Force Distribution
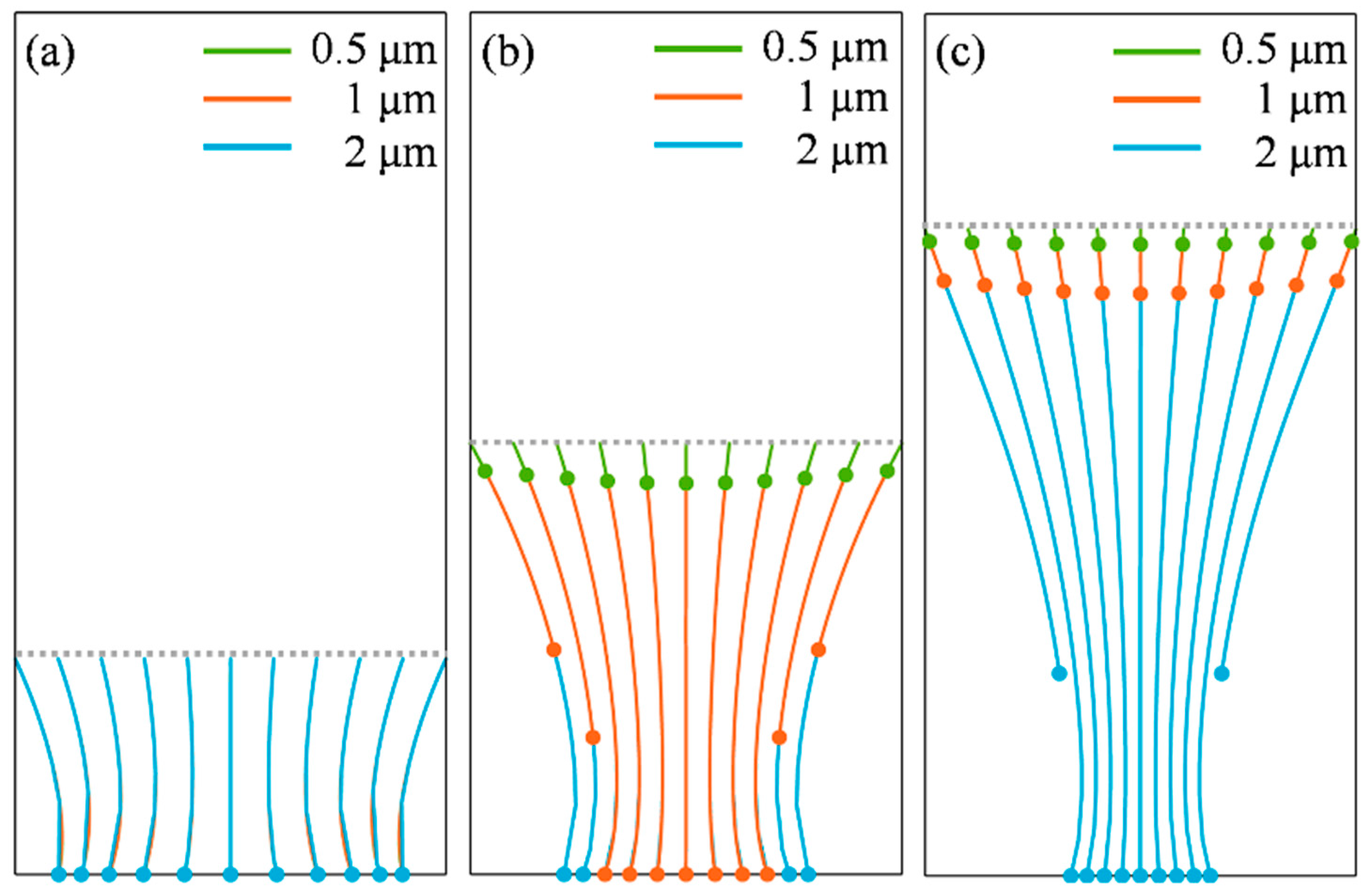
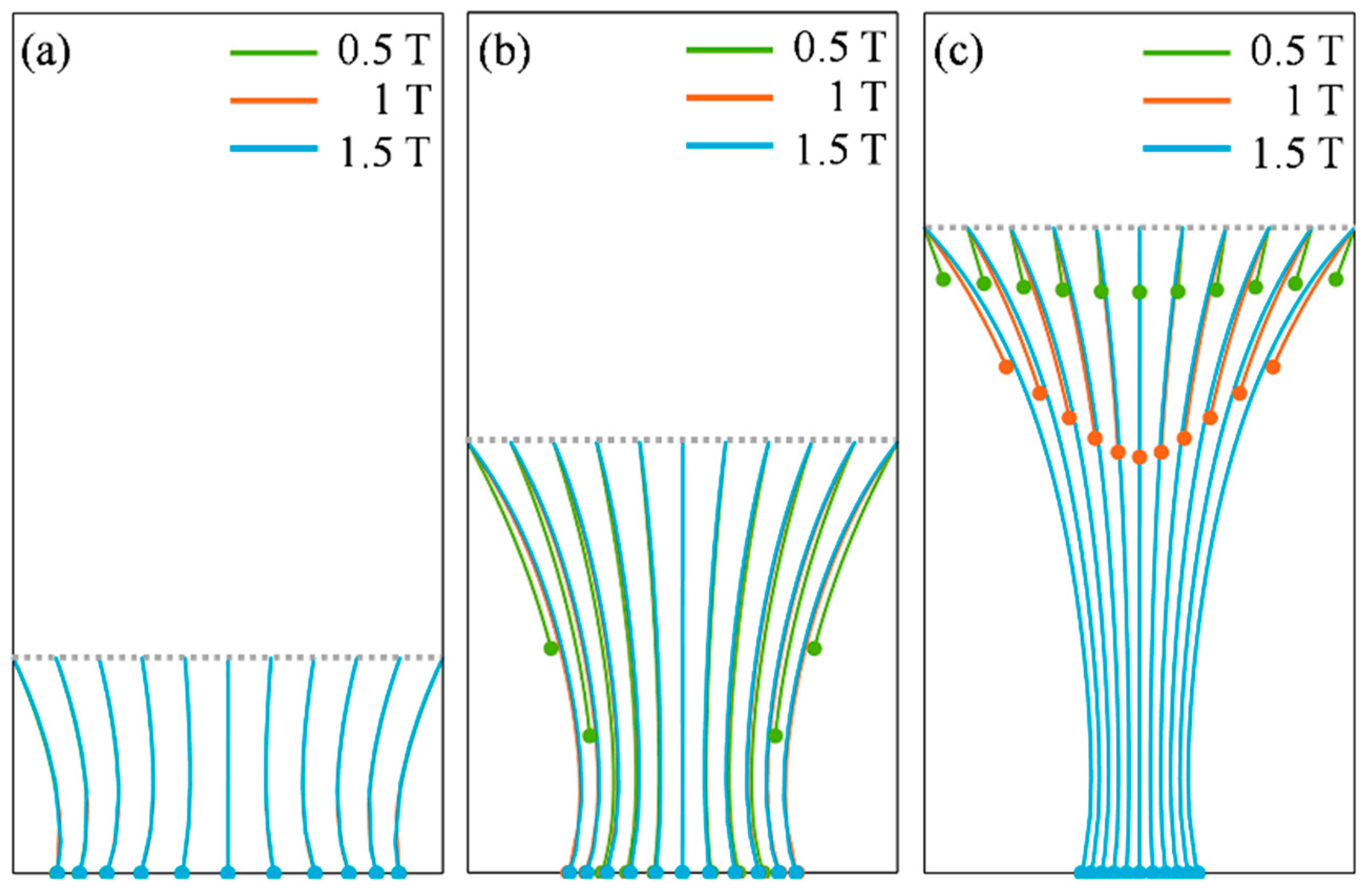
3.2. Trajectories of Magnetic Particles with Different Diameters
3.3. The Effect of the Remanence on the Trajectory of Particles
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Misra, R.D. Magnetic drug-targeting carrier encapsulated with thermosensitive smart polymer: Core-shell nanoparticle carrier and drug release response. Acta Biomater. 2007, 3, 838–885. [Google Scholar] [CrossRef]
- Honaker, R.; Saracoglu, M.; Huang, Q. Evaluation of a novel coal flotation improvement approach with the addition of hydrophobic magnetic particles. Int. J. Coal Prep. Util. 2020, 40, 843–859. [Google Scholar] [CrossRef]
- Amyn, S.; Teja, P. Synthesis, properties, and applications of magnetic iron oxide nanoparticles. Prog. Cryst. Growth Chract. Mater. 2009, 55, 22–45. [Google Scholar]
- Wang, J.; Tang, B.; Tsuzuki, T.; Liu, Q.; Hou, X.; Lu, S. Synthesis, characterization and adsorption properties of superparamagnetic polystyrene/Fe3O4/graphene oxide. Chem. Eng. J. 2012, 204–206, 258–263. [Google Scholar] [CrossRef]
- Toghraie, D.; Alempour, S.; Afrand, M. Experimental determination of viscosity of water based magnetite nanofluid for application in heating and cooling systems. J. Magn. Magn. Mater. 2016, 417, 243–248. [Google Scholar] [CrossRef]
- Borbáth, T.; Bica, D.; Potencz, I.; Vékás, L.; Borbáth, I.; Boros, T. Magnetic nanofluids and magnetic composite fluids in rotating seal systems. IOP Conf. Ser. Earth Environ. Sci. 2010, 12, 012105. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, Y. Application of ferro-cobalt magnetic fluid for oil sealing. J. Magn. Magn. Mater. 2003, 267, 105–110. [Google Scholar] [CrossRef]
- Wang, H.; Yan, L.; Liu, D.; Wang, C.; Zhu, Y.; Zhu, J. Investigation of the tribological properties: Core-shell structured magnetic Ni@NiO nanoparticles reinforced epoxy nanocomposites. Tribol. Int. 2015, 83, 139–145. [Google Scholar] [CrossRef]
- Zhou, G.; Zhu, Y.; Wang, X.; Xia, M.; Zhang, Y.; Ding, H. Sliding tribological properties of 0.45% carbon steel lubricated with Fe3O4 magnetic nano-particle additives in baseoil. Wear 2013, 301, 753–757. [Google Scholar] [CrossRef]
- Zhang, Q.; Wu, B.; Song, R.; Song, H.; Zhang, J.; Hu, X. Preparation, characterization and tribological properties of polyalphaolefin with magnetic reduced graphene oxide/Fe3O4. Tribol. Int. 2020, 141, 105952. [Google Scholar] [CrossRef]
- Kianfar, E. Magnetic Nanoparticles in Targeted Drug Delivery: A Review. J. Supercond. Nov. Magn. 2021, 34, 1709–1735. [Google Scholar] [CrossRef]
- Alrushaid, N.; Khan, F.A.; Al-Suhaimi, E.A.; Elaissari, A. Nanotechnology in cancer diagnosis and treatment. Pharmaceutics 2023, 15, 1025. [Google Scholar] [CrossRef]
- Zhang, Q.; Song, H.; Wu, B.; Feng, W.; Li, X.; Jiao, Y.; Hu, X. Effect of magnetic field on the tribological behaviors of Fe3O4@MoS2 as polyalphaolefin additive in the steel/steel friction interface. Wear 2021, 466–467, 203586. [Google Scholar] [CrossRef]
- Xue, Z.; Wang, Y.; Zheng, X.; Lu, D.; Li, X. Particle capture of special cross-section matrices in axial high gradient magnetic separation: A 3D simulation. Sep. Purif. Technol. 2020, 237, 116375. [Google Scholar] [CrossRef]
- Krafcik, A.; Babinec, P.; Strbak, O.; Frollo, I. A theoretical analysis of magnetic particle alignment in external magnetic fields affected by viscosity and brownian motion. Appl. Sci. 2021, 11, 9651. [Google Scholar] [CrossRef]
- Furlani, E.; Ng, K. Nanoscale magnetic biotransport with application to magnetofection. Phys. Rev. E 2008, 77, 061914. [Google Scholar] [CrossRef]
- Sinha, A.; Ganguly, R.; Puri, I. Magnetic separation from superparamagnetic particle suspensions. J. Magn. Magn. Mater. 2009, 321, 2251–2256. [Google Scholar] [CrossRef]
- Haverkort, J.; Kenjeres, S.; Kleijn, C. Computational simulations of magnetic particle capture in arterial flows. Ann. Biomed. Eng. 2009, 37, 2436–2448. [Google Scholar] [CrossRef]
- Shi, Z.; Chen, S.; Sun, J.; Li, M.; Jia, S. Three-dimensional numerical analysis of focusing and separation of diamagnetic particles in ferrofluid. J. Phys. D Appl. Phys. 2020, 53, 315002. [Google Scholar] [CrossRef]
- Takayasu, M.; Gerber, R.; Friedlaender, F. Magnetic separation of submicron particles. IEEE Trans. Magn. 1983, 19, 2112–2114. [Google Scholar] [CrossRef]
- Furlani, E.; Xue, X. Field, force and transport analysis for magnetic particle-based gene delivery. Microfluids Nanofluids 2012, 13, 589–602. [Google Scholar] [CrossRef]
- Sun, J.; Shi, Z.; Chen, S.; Jia, S. Experimental and numerical analysis of the magnetophoresis of magnetic nanoparticles under the influence of cylindrical permanent magnet. J. Magn. Magn. Mater. 2019, 475, 703–714. [Google Scholar] [CrossRef]
- Karpov, A.; Kozireva, S.; Avotina, D.; Chernobayeva, L.; Baryshev, M. Investigation of nanoparticle distribution formed by the rotation of the magnetic system. J. Magn. Magn Mater. 2014, 369, 86–91. [Google Scholar] [CrossRef]
- Zheng, X.; Wang, Y.; Lu, D. Study on capture radius and efficiency of fine weakly magnetic minerals in high gradient magnetic field. Miner. Eng. 2015, 74, 79–85. [Google Scholar] [CrossRef]
- Li, X.; Yao, K.; Liu, H.; Liu, Z. The investigation of capture behaviors of different shape magnetic sources in the high-gradient magnetic field. J. Magn. Magn. Mater. 2007, 311, 481–488. [Google Scholar] [CrossRef]
- Tokura, S.; Hara, M.; Kawaguchi, N.; Amemiya, N. Contactless magnetic manipulation of magnetic particles in a fluid. J. Magn. Magn. Mater. 2016, 411, 68–78. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | L1 | H1 | L2 | H2 | d |
|---|---|---|---|---|---|
| Values (mm) | 10 | 20 | 10 | 3 | 1.25 |
| Vacuum Permeability | Relative Permeability of Air | Remanence | Fluid Density | Fluid Dynamic Viscosity | Particle Density |
|---|---|---|---|---|---|
| 4π 10−7 H/m | 1 | 0.5 T, 1 T, 1.5 T | 1000 kg/m3 | 8.94 10−4 Pa | 5180 kg/m3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Song, H.; Song, R.; Hu, X. Simulation Analysis of the Motion of Superparamagnetic Particles in Liquid-Phase Fluid under a Magnetic Field. Appl. Sci. 2023, 13, 5406. https://doi.org/10.3390/app13095406
Zhang Q, Song H, Song R, Hu X. Simulation Analysis of the Motion of Superparamagnetic Particles in Liquid-Phase Fluid under a Magnetic Field. Applied Sciences. 2023; 13(9):5406. https://doi.org/10.3390/app13095406
Chicago/Turabian StyleZhang, Qiangqiang, Hui Song, Ruhong Song, and Xianguo Hu. 2023. "Simulation Analysis of the Motion of Superparamagnetic Particles in Liquid-Phase Fluid under a Magnetic Field" Applied Sciences 13, no. 9: 5406. https://doi.org/10.3390/app13095406