1. Introduction
According to the Statistical Bulletin on the Development of the Transportation Industry in 2021 issued by the Chinese government in May 2022, the total mileage of roads in China reached 5.2807 million kilometers, and the number of urban buses and train reached 709,400. Through the study in Malaysia, Kuys et al. [
1] found that all countries in the world are facing the problems of increasing urban roads, increasing numbers of buses, and increasing road congestion. With the continuous increase in highway mileage, the comfort of buses has gradually attracted attention. Previous studies found that bus comfort feelings mainly come from noise, temperature, vibration, and acceleration, as listed in
Table 1. Among these four factors, vibration and acceleration are the most popular two.
Vertical vibration is the most common form of vibration experienced by passengers in a bus. In 1962, Coermann [
2] abstracted the human body into a mechanical impedance structure with multiple degrees of freedom and discussed the biomechanical responses of human body sitting posture to vertical vibration. Gao et al. [
3] established a two-degree-of-freedom vertical vibration model of the human body and discussed the influence of body parameters on driver comfort. Bazil et al. [
4] discussed the influence of the angle between the fixed backrest and seat on human comfort under different vibration situations through experiments. Their results show that the angle cannot be expressed by a single frequency weighting, rather a multi-frequency weighting function with strong nonlinearity. Xie et al. [
5] tested the vibration of a multi-floor three-dimensional passenger station on-site and found that the passenger bus causes floor vertical vibration and thus causes the passenger discomfort in the passenger station. Faster bus speed induces stronger discomfort. The passengers on a train have similar discomfort when the train speed is fast. Zhou et al. [
6] verified experimentally that the frequency dependence of the vibration discomfort depends on the acceleration and force at the seat interface with the body, which further verifies that the human body is less affected on the dynamic force than the acceleration. Even a small vertical acceleration can cause discomfort. Vertical acceleration is the main influencing factor in passenger comfort.
Table 1.
Research on comfortable attributes influencing bus passengers in previous study.
Table 1.
Research on comfortable attributes influencing bus passengers in previous study.
| Comfortable Attributes | Authors, Years, Source | Comfortable Attributes | Authors, Years, Source |
|---|
| Noise | Oborne and Clarke, 1973, [7] | Temperature | |
| EN 13816, 2002, [8] | EN 13816, 2002, [8] |
| Prashanth et al., 2013, [9] | Zhang et al., 2014, [10] |
| Zhang et al., 2014, [10] | Almeida et al., 2020, [11] |
| Kilikevičius et al., 2020, [12] | Zhou et al., 2022, [13] |
| Mathes et al., 2022, [14] | |
| Vibration | Lin et al., 2010, [15] | Accelerations | Wåhlberg, 2006, [16] |
| Lin and Chen, 2011, [17] | EN 12299, 2009, [18] |
| Sekulić et al., 2013, 2016, 2018, [19,20,21] | Castellanos and Fruett, 2014, [22] |
| Castellanos and Fruett, 2014, [22] | Maternini and Cadei, 2014, [23] |
| Sekulić and Mladenović, 2016, [24] | Vovsha et al., 2014, [25] |
| Zhao et al., 2016, [26] | Eboli et al., 2016, [27] |
| Shen et al., 2016, [28] | Barabino et al., 2018, [29] |
| Meiping and Wen, 2017, [30] | Nguyen et al., 2019, [31] |
| Wang et al., 2020, [32] | Bae et al., 2019, [33] |
| Nguyen et al., 2021, [34] | Szumska et al., 2022, [35] |
Uneven ground is the main cause of the vertical vibration of a bus, which seriously affects the comfort of passengers and poses a certain health risk to passengers. In addition to the vertical vibration caused by the bus itself, the uneven ground affects the vertical acceleration. The vibration amplitude is larger, the acceleration is stronger, and the discomfort is stronger. Zhang et al. [
36] established the random excitation of the road surface by using the filtered white noise method and analyzed the vertical acceleration caused by the uneven road surface through simulation. They evaluated the ride comfort. Tang et al. [
37] used the neural network algorithm to analyze the random excitation of the road surface, thus establishing an annoyance rate model to quantitatively evaluate the comfort of passengers. Bogsjö et al. [
38] proposed three new road profile models to quantitatively study passenger comfort and vehicle damage. Chen et al. [
39] used experiments to prove the impact of deceleration strips on human comfort. Their results show that the characteristic vibration dose value can be used as a method to evaluate passenger comfort. Agostinacchio et al. [
40] proved that an irregular road surface generates a considerable instantaneous dynamic load, which does not contribute to the total response but does affect the human comfort of riding. For the bumpy analysis of the front and rear seats in a bus, Wu and Hao [
41] analyzed and demonstrated that the bumpier rear seat is due to the location of the bus gravity and the wheel from the perspective of the differential equation of fixed axle rotation. Song [
42] performed a qualitative analysis for the safety requirements of automobiles and reached a similar conclusion. Their common shortcoming is the lack of vehicle dynamics analysis, and their conclusion that the rear row of the bus is bumpier is worthy of further investigation.
The bus speed is also a major factor affecting the comfort of passengers, especially on uneven roads. Sekulić et al. [
19] took the intercity bus IK-301 as an oscillation model with ten degrees of freedom, used the power spectral density of asphalt concrete pavement roughness to generate a total road excitation, and analyzed the impact of vibration on passenger comfort. Bae et al. [
33] discussed the impact of speed on passenger comfort, and then proposed a time-optimal speed planning method, which can improve passenger comfort by reasonably planning the driving path. Barabino et al. [
43] showed that speed has a great impact on passenger comfort. Nguyen et al. [
44] established three relatively simple mathematical models, focusing on the actual driving behavior of urban buses, and studied the impact of acceleration and speed changes on human comfort. In summary, the speed of a bus has a certain impact on the comfort of passengers.
In order to reduce the net displacement of the rear wheel, engineers often assign different values to the spring stiffness of the front wheel and the rear wheel. Zhang et al. [
45] used MATLAB to carry out the bus driving matrix and set the front and rear wheel stiffness as 155,400 N/m and 250,000 N/m, respectively, in the calculation. The stability of the bus was analyzed through the derivation of a rigid body dynamics equation. Kong et al. [
46] evaluated the quality of the suspension system of the bus through experiments. In the experiment, P-2 parabolic spring was used. The stiffness of the rear wheel was 1.28 times that of the front wheel on average. Long et al. [
47] used simulink toolbox to study the influence of vehicle suspension stiffness on bus ride comfort. Their study found that the stiffness of the rear wheel was positively correlated with passenger comfort. Olmeda et al. [
48] also explained the influence of the front and rear wheel stiffness coefficient on bus comfort when carrying out a bus lateral dynamics simulation. However, in the equation of its calculation, there are many state variables that have interference and are treated as noise when processing data. It can be seen that the spring stiffness coefficients of the front and rear wheels of the passenger car will also affect the comfort of passengers.
Previous studies focused on vibration and acceleration analysis, but they were too focused on a vehicle analysis of the response of the whole vehicle or the interaction between the vehicle and the uneven ground. Few studies have focused on the coupling analysis of vehicle parts and uneven pavement, and the study of vehicle parts is more conducive to bus design. There are still few studies on the impact of bus speed and the stiffness of front and rear wheel springs on passenger comfort. Therefore, this paper will start with the above problems and conduct quantitative research on the whole process of bus driving based on mathematical and physical methods through self-defining the uneven road surface. This paper is organized as follows: In
Section 2, the force of the front and rear wheels of the bus when driving on a flat road is analyzed. In
Section 3, the differential equation of the whole process of bus driving is established based on the user-defined uneven road surface and the local displacement characteristics of the front and rear seats of the bus are analyzed. In
Section 4, the mechanical responses of the bus under three different road conditions and different driving speeds are analyzed by using the differential equation of motion. In
Section 5, the influence of front and rear wheel spring stiffness on passenger car comfort is analyzed. Conclusions are drawn in
Section 6.
2. Mechanical Analysis of Bus Running on Horizontal Road
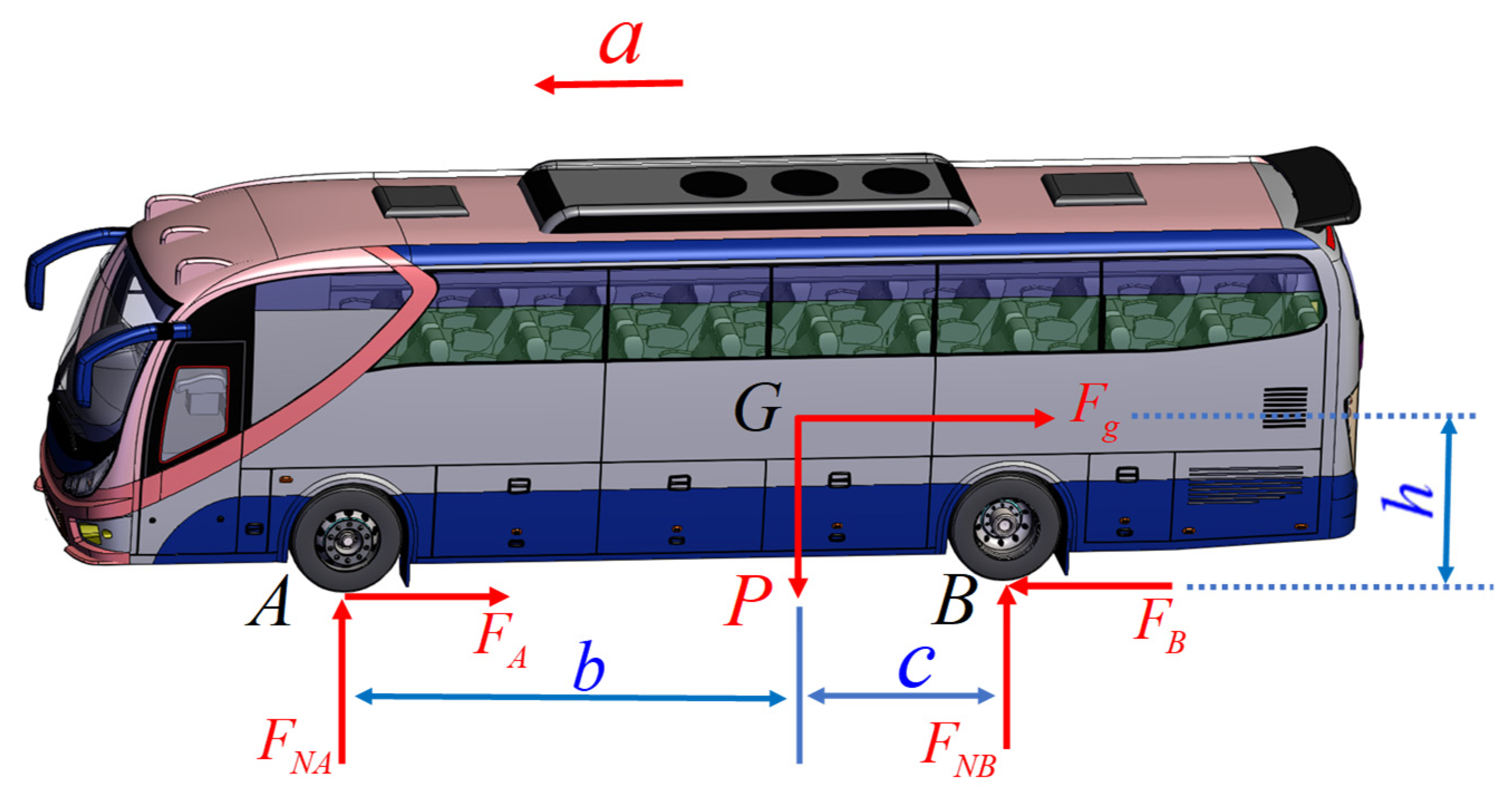
For a bus running on uneven roads, the displacement of the rear seats is significantly greater than that of the front seats. This phenomenon can be clearly observed with the naked eye. Most buses are driven by rear wheels. This means that the engine drives the rear wheels to rotate and move forward depending on the friction between the rear wheels and the ground. In order to make the rear wheel of bus have greater friction with the ground, it is necessary to move the center of gravity of the bus as far back as possible, so as to ensure that the support force of the ground to the rear wheel is greater than that of the front wheel. The center of gravity of the actual running bus is often placed between the front and rear wheels near 1/3 of the rear wheels. This can ensure that the rear wheels bear 2/3 of the vehicle weight and the front wheels bear 1/3 of the vehicle weight.
This section analyzes the force of a bus when the bus is normally running on a horizontal road. All bodies of the bus are taken as the rigid bodies to establish the mechanical model bus as shown in
Figure 1. The bus is assumed to move in a horizontal straight line with acceleration
a (m/s
2), where the total mass of the bus is
m (kg), the height of the center of mass
G from the ground is
h (m), and the distance from the front and rear axles to the vertical line of the center of mass is equal to
b (m) and
c (m), respectively.
Using D’Alembert’s principle [
49], the added virtual inertial force is
The bus gravity is
where
Fg is the inertial force, N;
P is the gravity, N;
g is the acceleration of gravity, m/s
2.
Moment analysis at point
A of the front wheel obtains
Similarly, the moment analysis at point
B of the front wheel is expressed as
where
FNA (N) is the ground support force on the front wheels and
FNB (N) is the ground support force on the rear wheels.
According to Equations (1)–(4), one can obtain
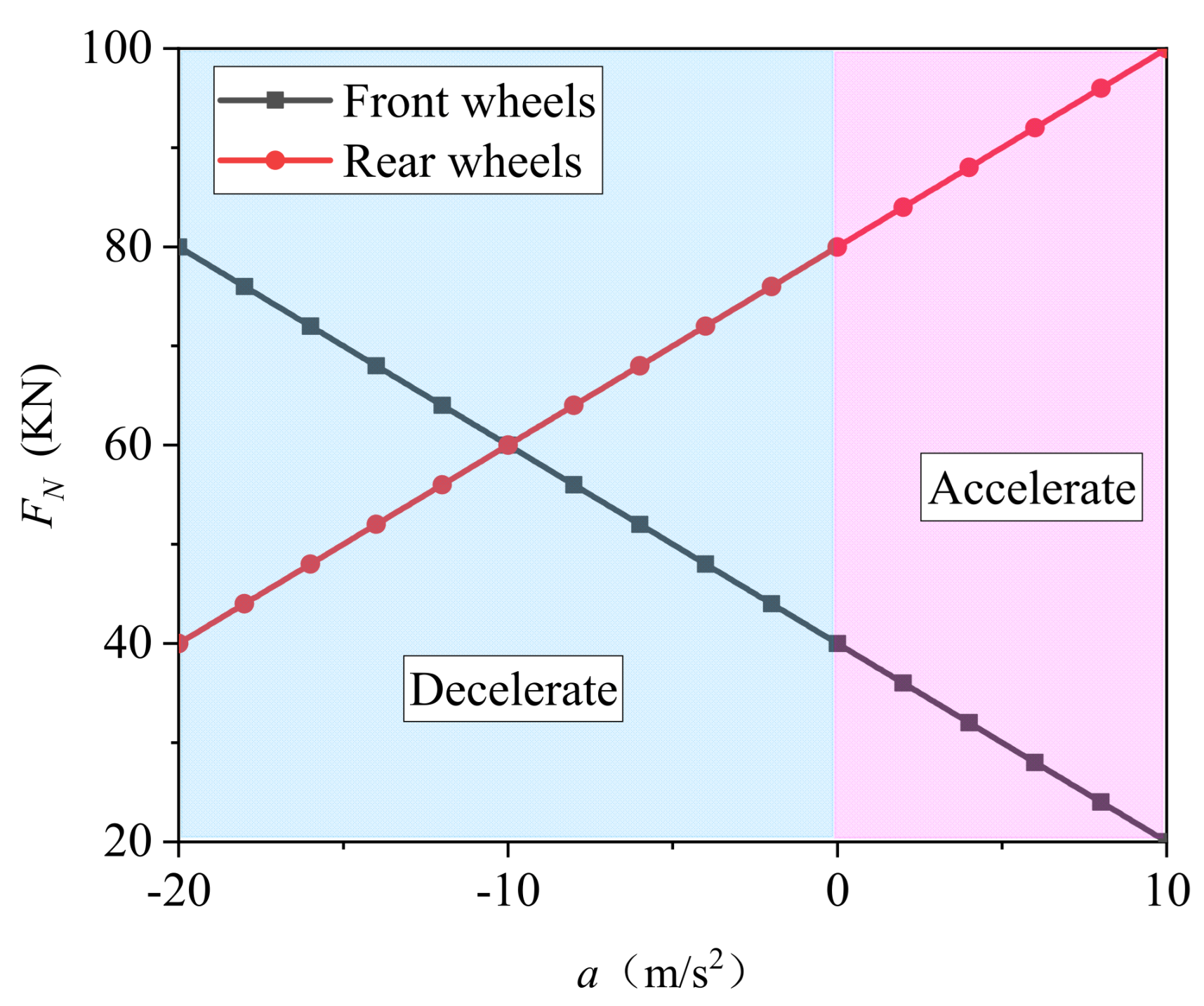
Taking the Yutong ZK6105HNGS1 bus [
50] as an example, the whole-body mass of the bus is 12,000 kg, the body length is 10 m, the height of the gravity center is 1.5 m, the wheelbase is 9 m, the front wheel is 1/3 from the center of gravity, and the rear wheel is 2/3 from the center of gravity. The relationship between the support force and the acceleration of the front and rear wheels on the ground is shown in
Figure 2, which is based on Equation (5). The normal maximum acceleration of the bus is 8 m/s
2 [
51], and the braking acceleration is −10 m/s
2 [
52]. The critical takeoff means that the support force
FN is zero.
Figure 2 shows that the critical takeoff condition is met with difficulty when the bus is running on a horizontal road. When the bus acceleration
a > −10 m/s
2, the supporting force of the ground to the rear wheel is always greater than that of the front wheel. According to the isolation method, it is not difficult to infer that the passengers in the rear row bear greater acceleration and greater acceleration changes.
3. Mechanical Analysis of a Bus Running on an Uneven Road
The smoothness of the road surface seriously affects the safety of buses [
53]. The fluctuation of ISO-B pavement is 0.1 m [
54], and some vertical acceleration reaches 2 m/s
2, which is more serious in rural regions [
55]. Zhang et al. [
56] used the power spectral density formula of road roughness in the Chinese national standard GB/T7031-2005 to inverse the road roughness. They obtained the maximum difference of 0.2 m and an acceleration of 2.5 m/s
2. When the human body feels a vertical acceleration above 0.5 m/s
2, it begins to feel obvious discomfort [
36,
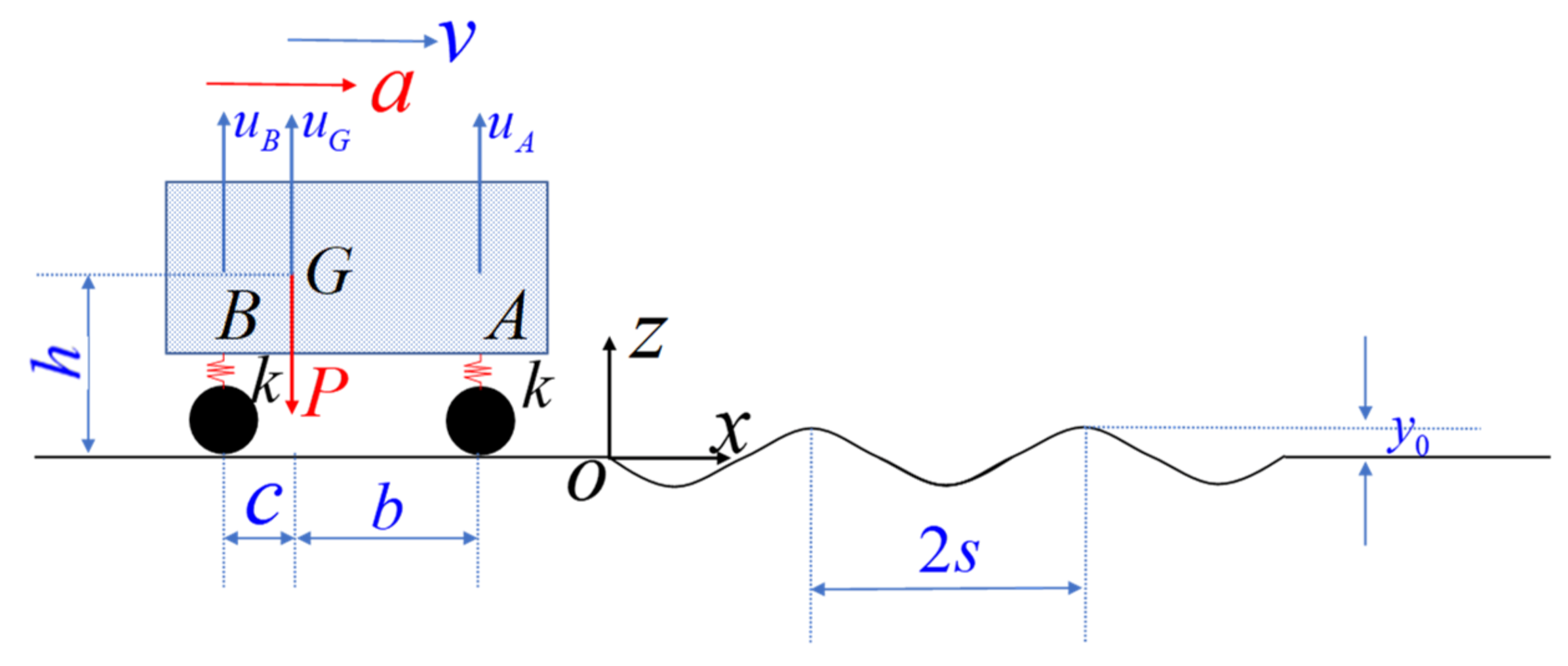
57]. In order to facilitate mechanical analysis, the bus is reasonably simplified as a plane problem and the displacement of the bus is analyzed. The road surface is assumed to be
y = hcos (2
πx/s) and
x = vt. The carriage and tire of the bus are connected by the spring coefficient
k. It is worth noting that the effect of dampers will be not considered in this paper, which means that energy does not decay with the progress of the bus. All conclusions of the analysis are based on the bus limit state, which is conducive to a better explanation of the problem. The vertical displacement of the front wheel, the center of gravity, and the rear wheel are defined as
uA,
uG, and
uB, respectively.
s is the difference between two adjacent wave peaks with a convex periodic boundary. Other parameters are consistent with
Figure 1. Three road conditions will be analyzed when the bus passes through the uneven road section. The initial state includes two: First, the spring bears the bus gravity and produces a certain displacement. Second, the front wheel position of the bus has just reached the starting point of the uneven road section. The analytical model is shown in
Figure 3. In this section, if there is no special explanation, the displacement is considered as vertical displacement, and the acceleration is also considered as vertical acceleration. Downhill means that the bus is in
road condition I (
0 ≤
x ≤ (
b +
c)) and climbing means that the bus is in
road condition III (2
ns ≤
x ≤ 2
ns + (
b +
c)
(n ∈
N*)).
3.1. Road Condition I
The bus moves forward. The front wheel drives into the uneven road section, but the rear wheel is still in the flat road section; thus, the bus travel distance is
0 ≤
x ≤ (
b +
c). The vertical displacement increment of two points
A and
B of the bus is denoted as
δA and
δB. Since the front wheel has driven into the pit, there is a geometric relationship:
where
yA and
yB are the vertical coordinates of the front and rear wheels of the bus.
All bodies of the bus are regarded as rigid bodies. The vertical displacement coordinate
uG at the center of gravity can be solved by using a similar triangle method:
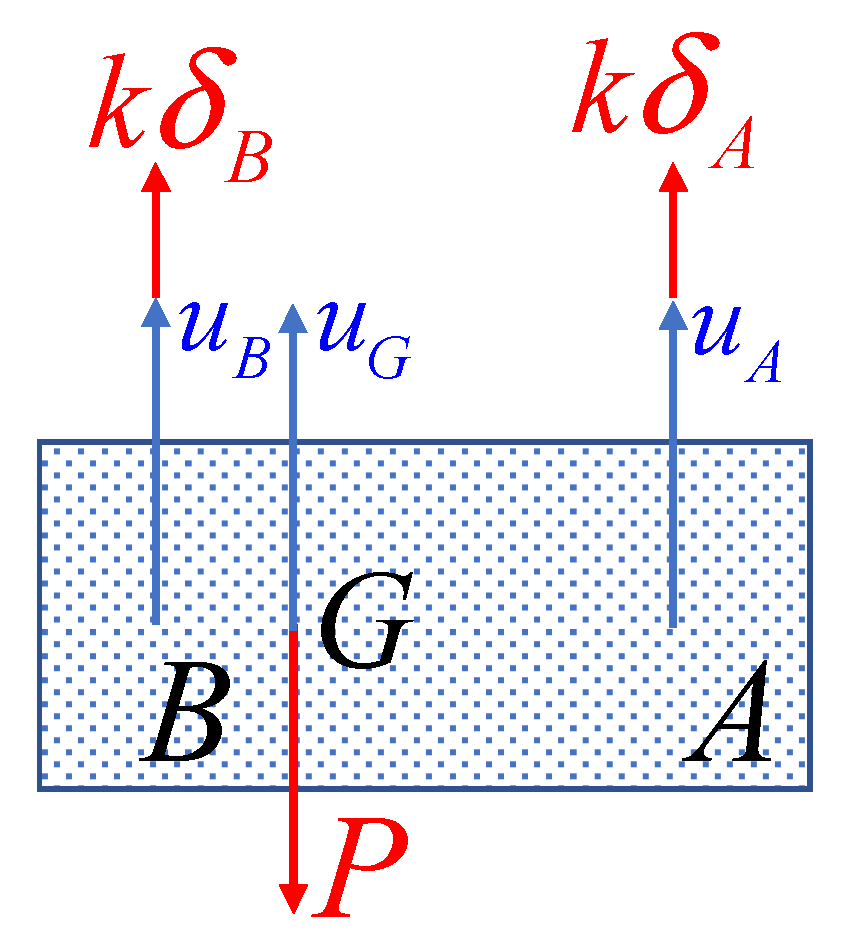
The upper part of the bus is analyzed by the free-body method. The force analysis is shown in
Figure 4:
The equation of motion is
The equilibrium equation for calculating the moment of force at point
G is
Combining Equations (8)–(10) obtains the differential equation of motion:
Its general solution is obtained with
where
C1 and
C2 are the coefficients to be determined by boundary conditions.
Combining Equations (6) and (10) obtains
uB:
When
x = 0 and the front wheel moves to point
O, the boundary condition is
Therefore, the coefficients in Equation (12) can be determined as
The vertical displacement of bus points
A and
B is then expressed as
The last subscript 1 in Equations (15) and (16) denotes road condition I.
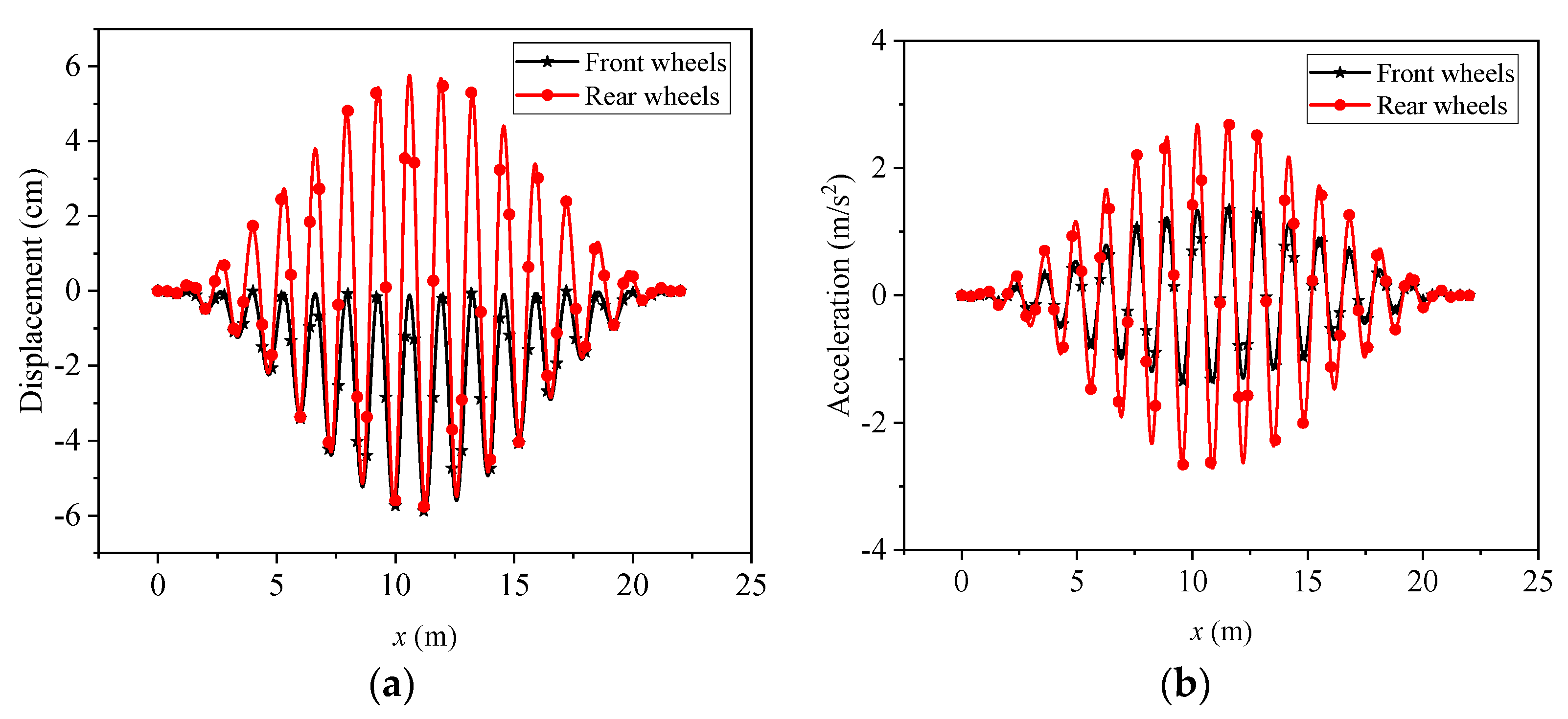
This paper uses MATLAB to solve Equation (16).
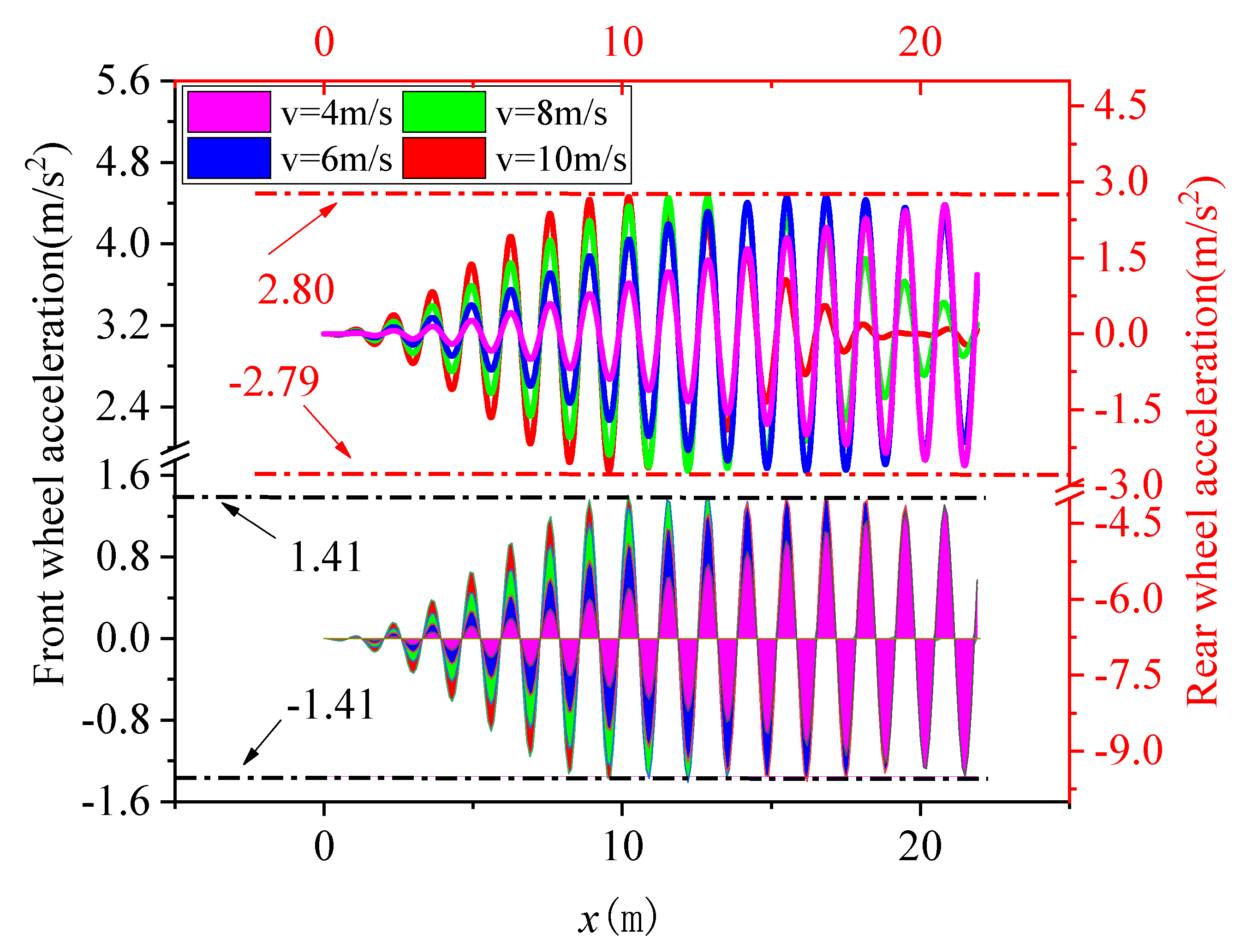
Figure 5 shows the result of only net displacement, which means the change in displacement and acceleration of the front and rear wheels in the first stage. The maximum net displacement difference is 5.93 cm at the front wheel and 11.86 cm at the rear wheel. When the front wheel drives on the uneven road and the rear wheel is still on the flat road, the displacement near the rear wheel position is greater. The net vertical acceleration of the front and rear wheels is more than 3 m/s
2, the peak net acceleration of the rear wheels is 5.31 m/s
2, and the peak acceleration of the front wheels is 3.32 m/s
2. The rear wheel acceleration is generally higher than the front wheel acceleration. Thus, the rear wheels are bumpier in the
road condition I.
3.2. Road Condition II
Both the front and rear wheels drive into an uneven road section, the bus position is (
b +
c) ≤
x ≤ 2
ns (
n ∈
N*).
N* is a positive integer. The general differential equation of bus motion is still Equation (11). Its boundary conditions at this stage become the following: when
x = b +
c, the motion state of
road condition II should satisfy Equation (16) in
road condition I. The continuity of bus displacement is
The subscript 2 represents road condition II.
When
x = 2
ns (
n ∈
N*), the front and rear wheels are all located on uneven road sections. The instantaneous state of the rear wheel entering the uneven road section is
The status of the front and rear wheels in this process is
The coefficients obtained by Equations (17)–(19) and Equation (12) are
Then, the vertical displacements at bus points
A and
B are
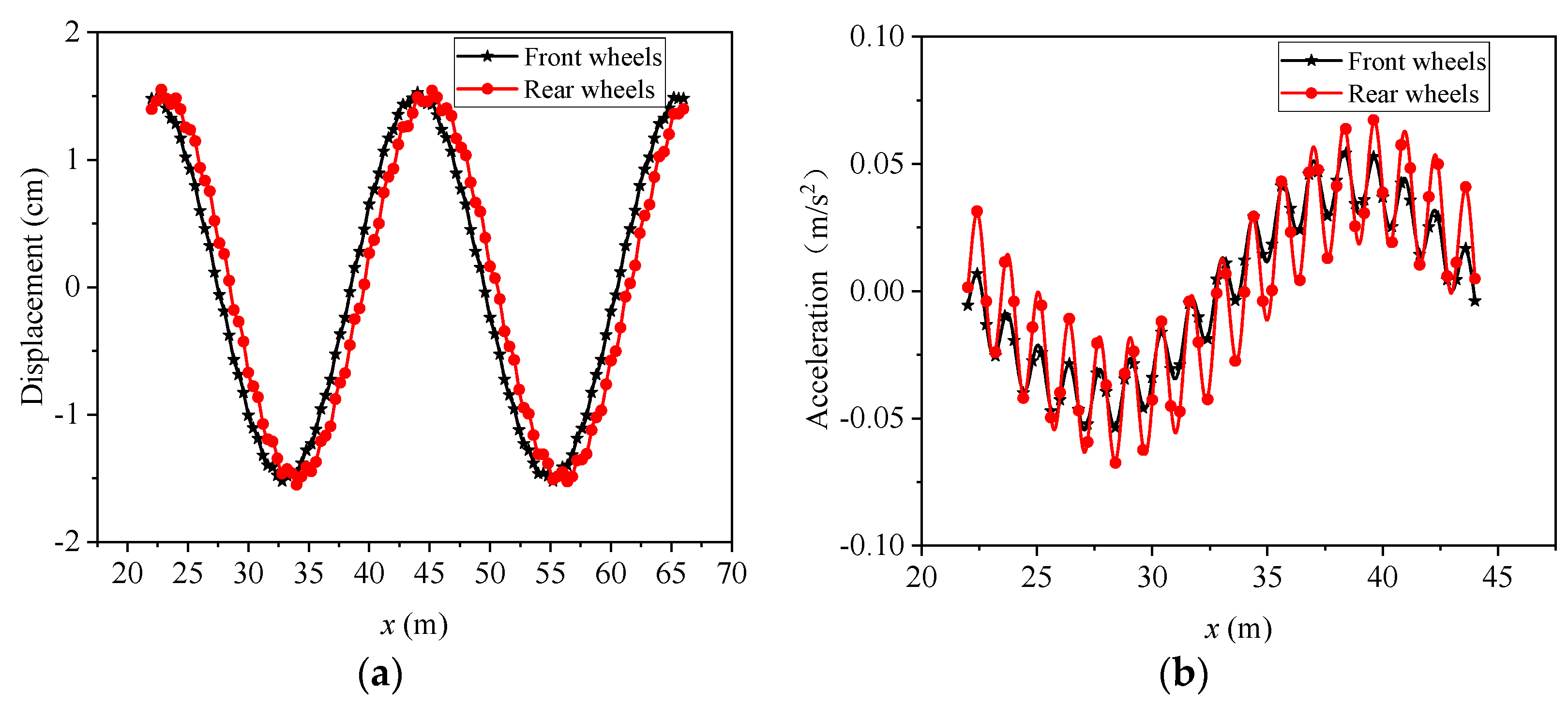
Equation (21) is still solved by MATLAB and
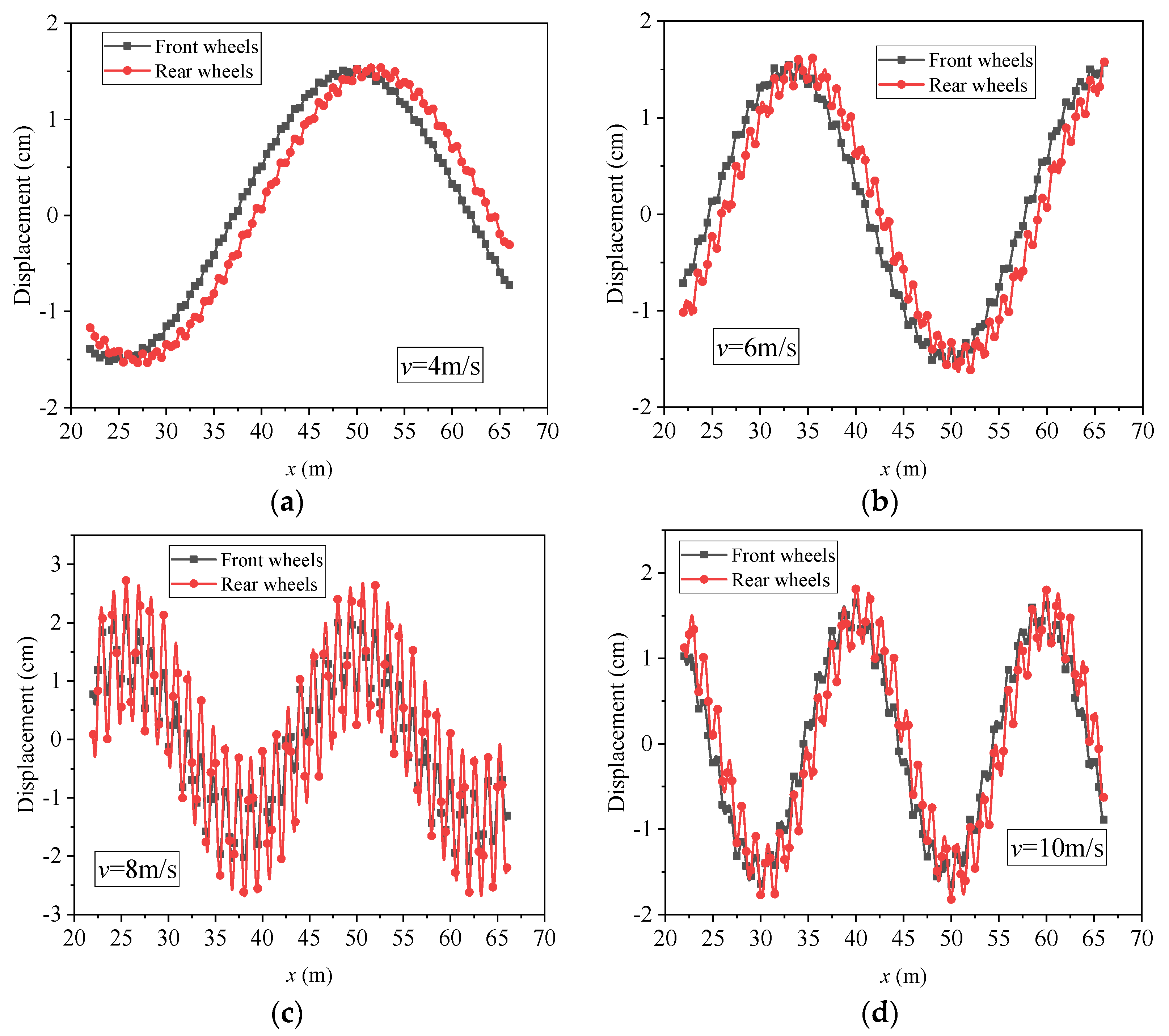
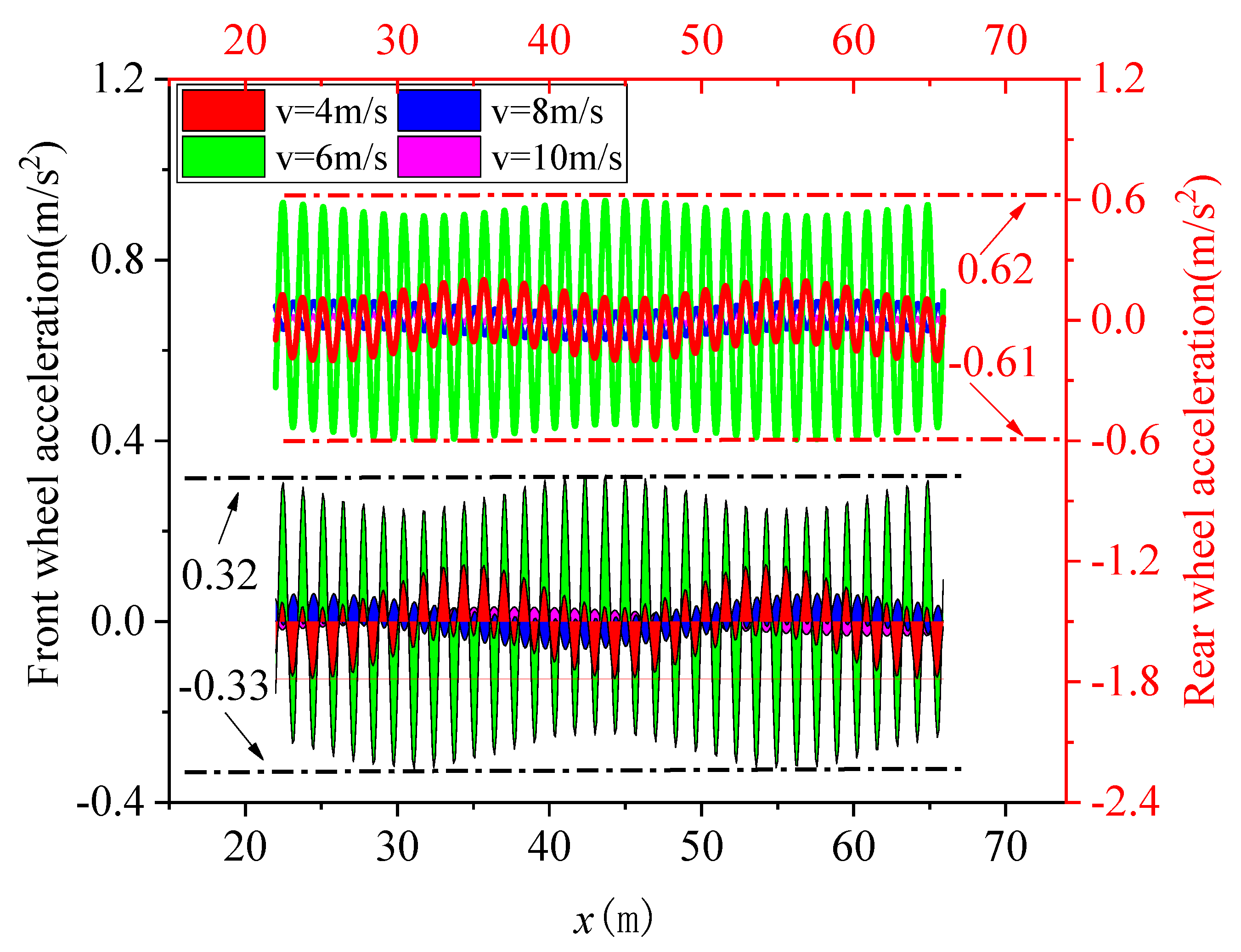
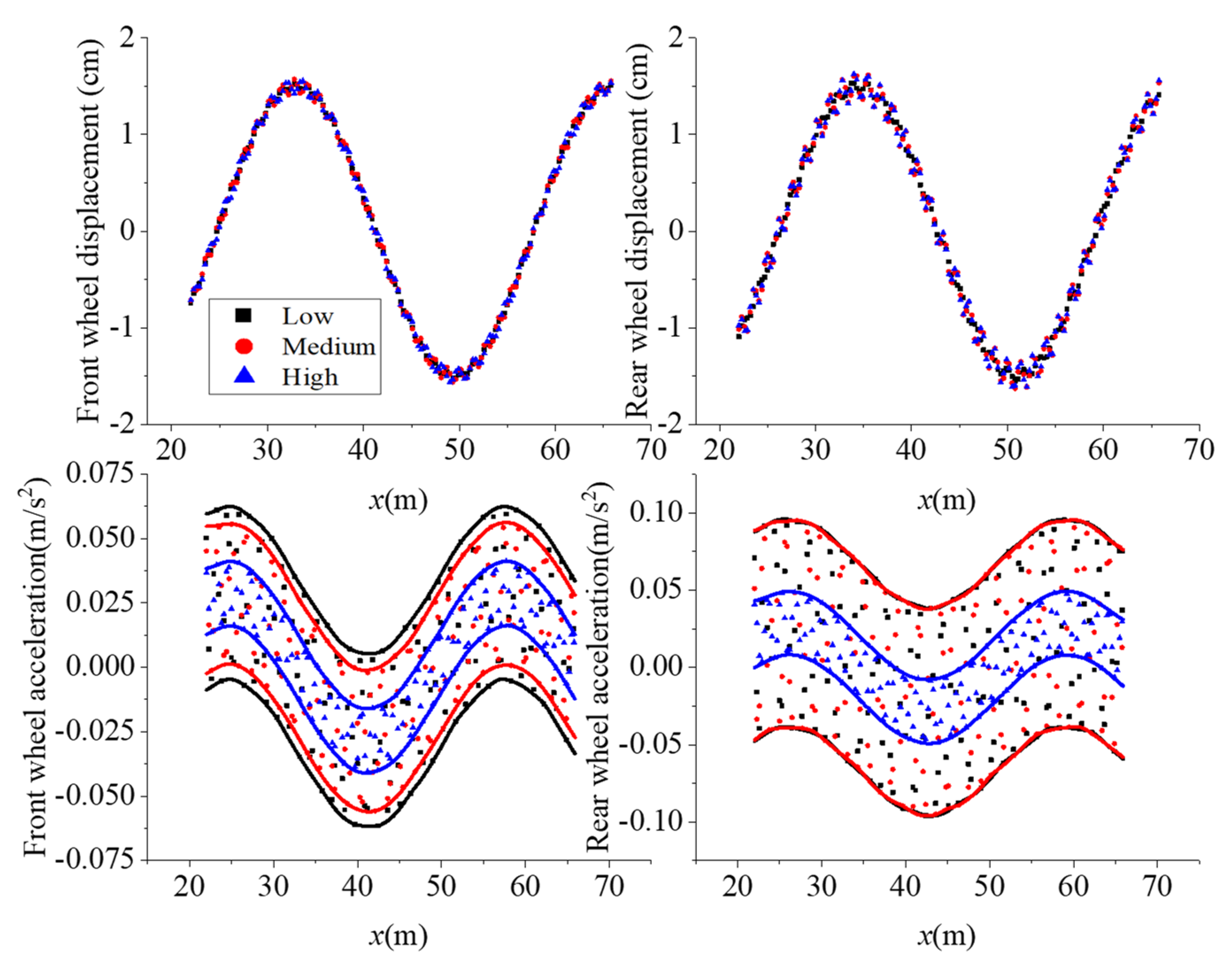
Figure 6 is the net displacement. At this time, the maximum net displacement difference is 3.05 cm at the front wheel and 3.1 cm at the rear wheel. Their displacement difference is not obvious in
Figure 6a. This may be due to the fact that the uneven road surface is larger than the body span in a single cycle. The vertical positions of the front wheel and the rear wheel are basically in synchronization. The net vertical acceleration of the front and rear wheels is more than 0.1 m/s
2, the net peak acceleration is 0.14 m/s
2 at the rear wheels and 0.1 m/s
2 at the front wheels. The acceleration is still higher at the rear wheels than at the front wheels. This result can still be used as an argument for the rear row being bumpier, although the difference is small or not salient.
3.3. Road Condition III
The front wheel drives into the flat section, but the rear wheel is still in the uneven section. At this time, the bus position is 2
ns ≤
x ≤ 2
ns + (
b +
c) (
n ∈
N*). The differential equation of motion in the
road condition III is still Equation (11). When
x = 2
ns (
n ∈
N*), the motion state of
road condition III should satisfy Equation (21) when
x = 2
ns (
n ∈
N*) in
road condition II. The continuity of the bus displacement satisfies
The subscript 3 represents road condition III.
When
x = 2
ns + (
b +
c) (
n ∈
N*), the front wheel has just entered the flat section and the rear wheel is still in the uneven section. The instantaneous state of the front wheel entering the flat road section is
The statuses of the front and rear wheels in this process are
The coefficients can be determined by Equations (22)–(24) and Equation (12) as
The vertical displacements at bus points
A and
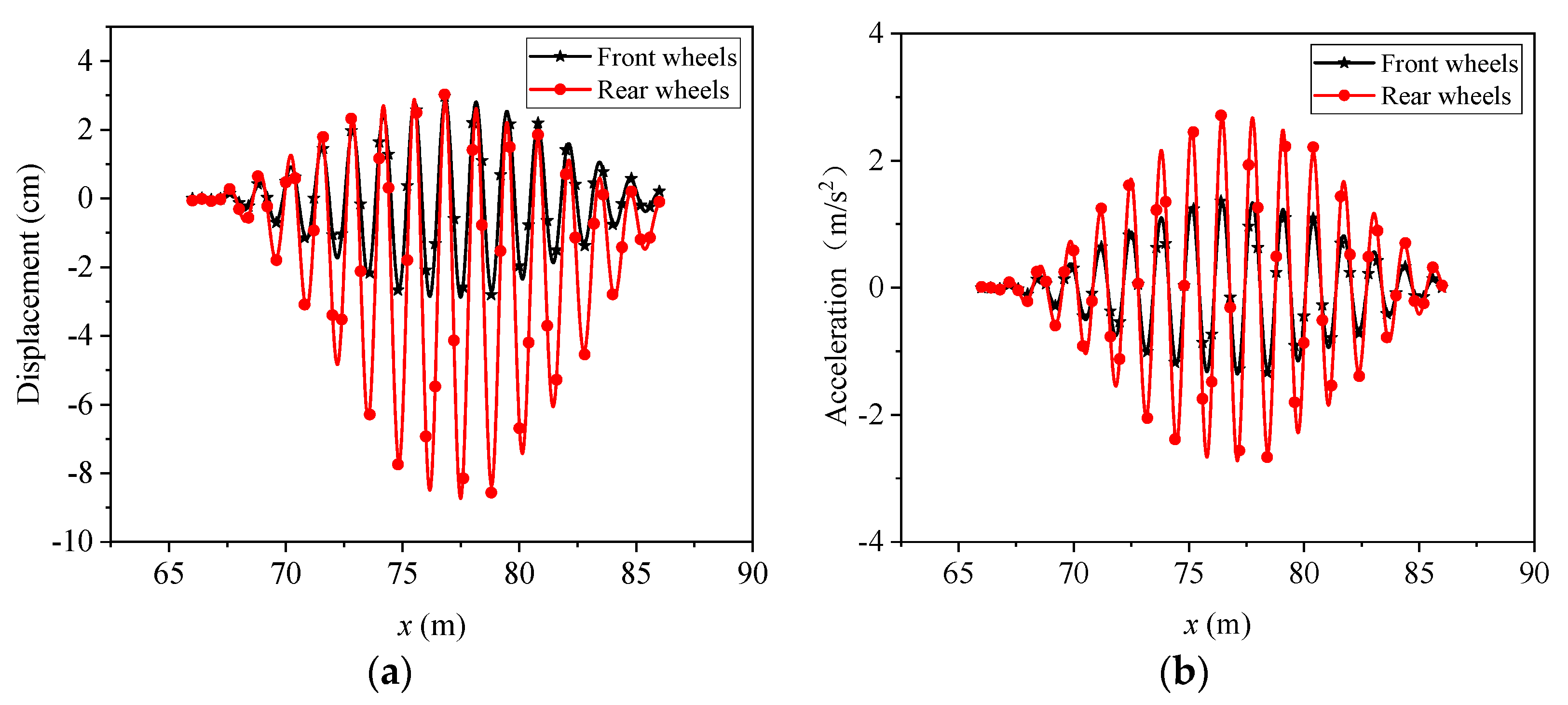
B are
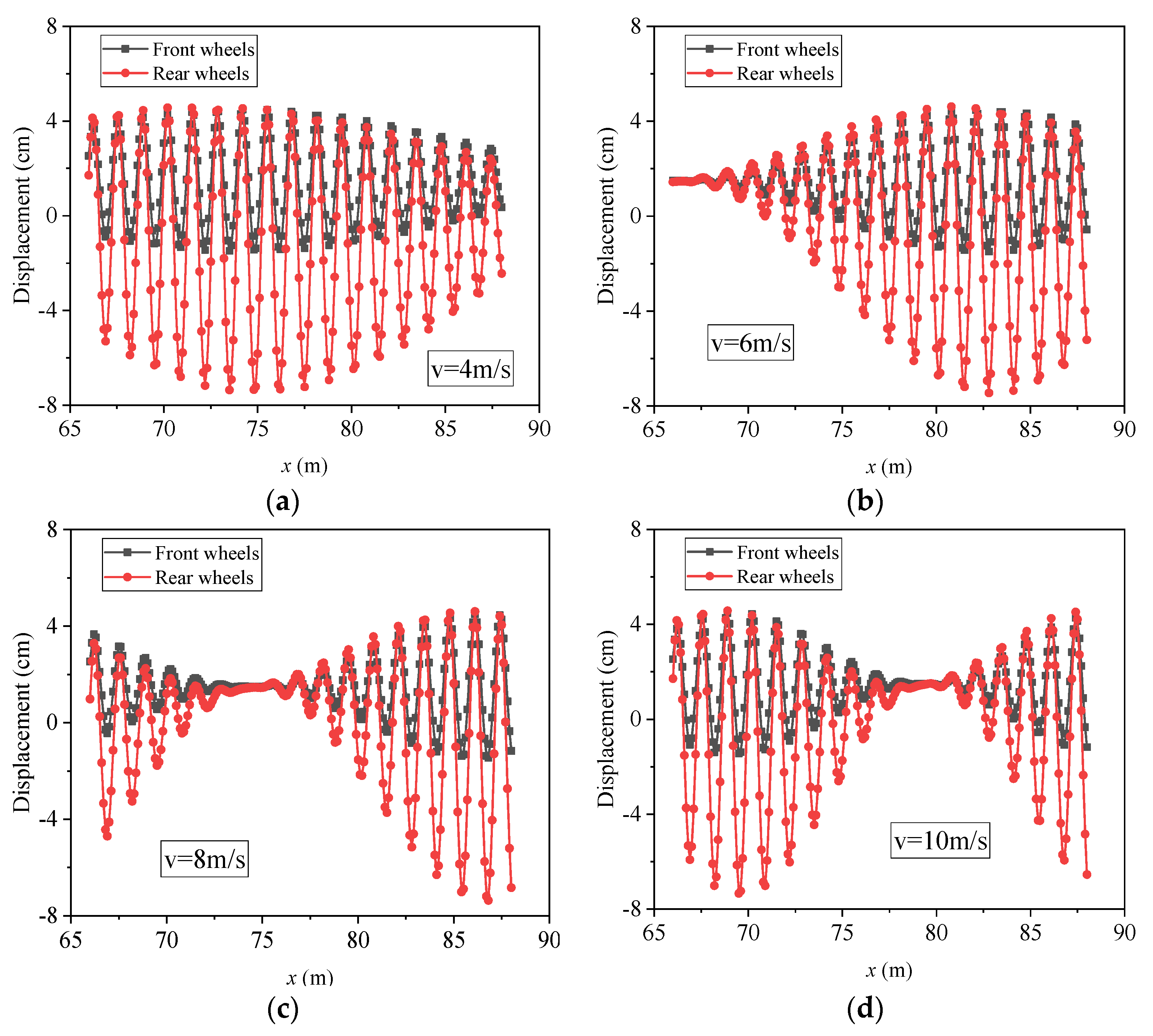
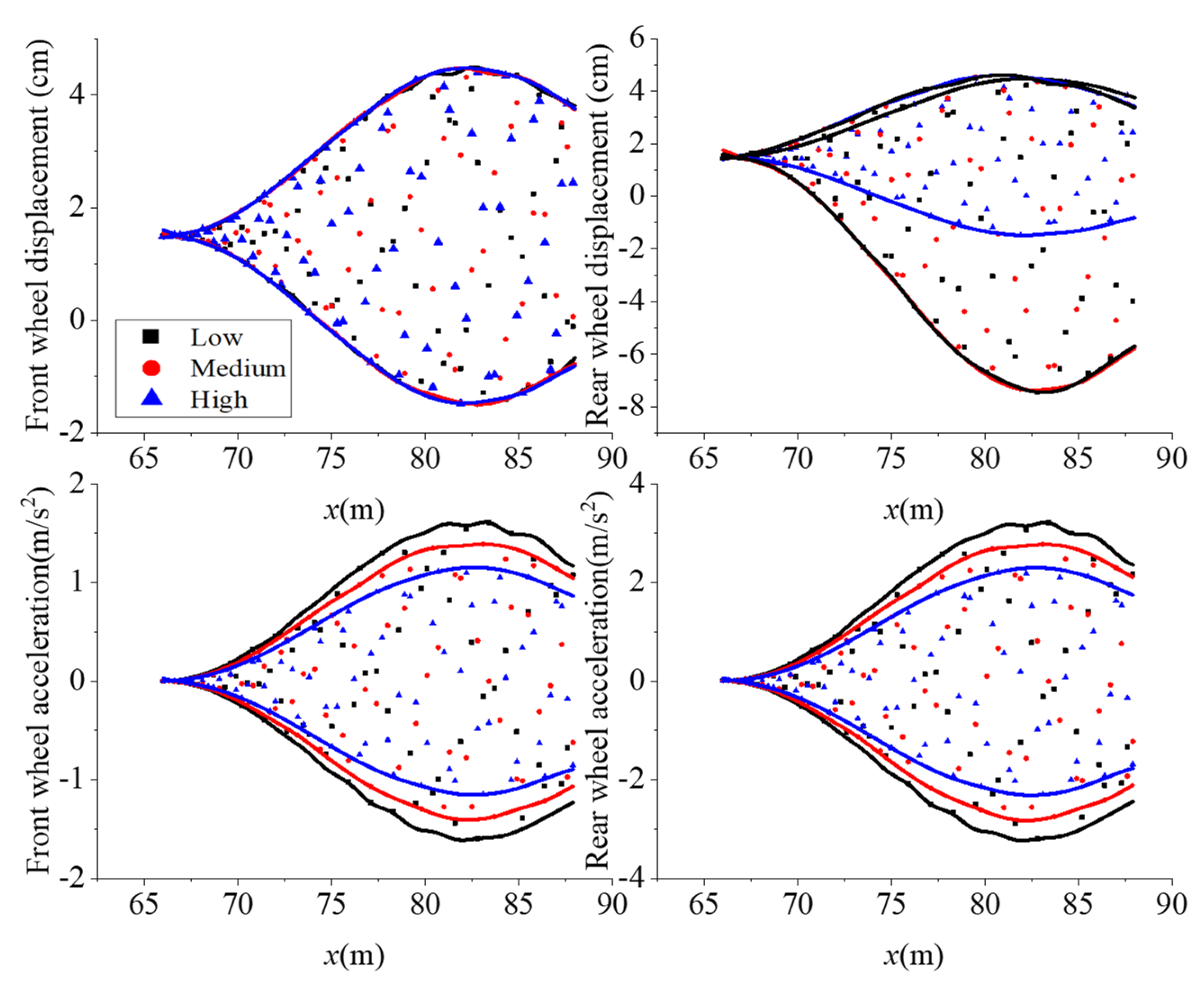
Figure 7 shows the net displacement and vertical acceleration calculated by Equation (26). The maximum net displacement difference is 5.95 cm at the front wheel and 12.1 cm at the rear wheel. When the front wheel drives on a flat road and the rear wheel is still on a bumpy road, the displacement near the rear wheel position is still large. The net vertical acceleration of the front and rear wheels is more than 3.2 m/s
2, the peak net acceleration of the rear wheels is 5.42 m/s
2, and the peak acceleration of the front wheels is 3.28 m/s
2. The rear wheel acceleration is generally higher than the front wheels. This means that the rear wheels are still bumpier at the
road condition II.
6. Conclusions
In this paper, from the perspective of rigid body dynamics, a motion differential equation suitable for bus driving was established by building a bumpy excitation road surface, and the mechanical response of the entire process on the road was analyzed. Secondly, based on the speed of the bus, the displacement and acceleration changes at different speeds were studied. Finally, the stiffness ratio of the front and rear wheels of the bus was analyzed. From these studies, the following conclusions can be drawn:
(1) When a bus travels on uneven roads, the rear seats are more bumpy than the front seats. The reason for this phenomenon is that the center of gravity of the bus is closer to the rear wheels, the rear wheels bear more force and are more prone to displacement. This indicates that bus design should pay special attention to the damping of the bus backseat and control its displacement. Passengers who are “old, weak, disabled, pregnant”, especially elderly people with osteoporosis, should avoid the seats at the rear of the bus as much as possible.
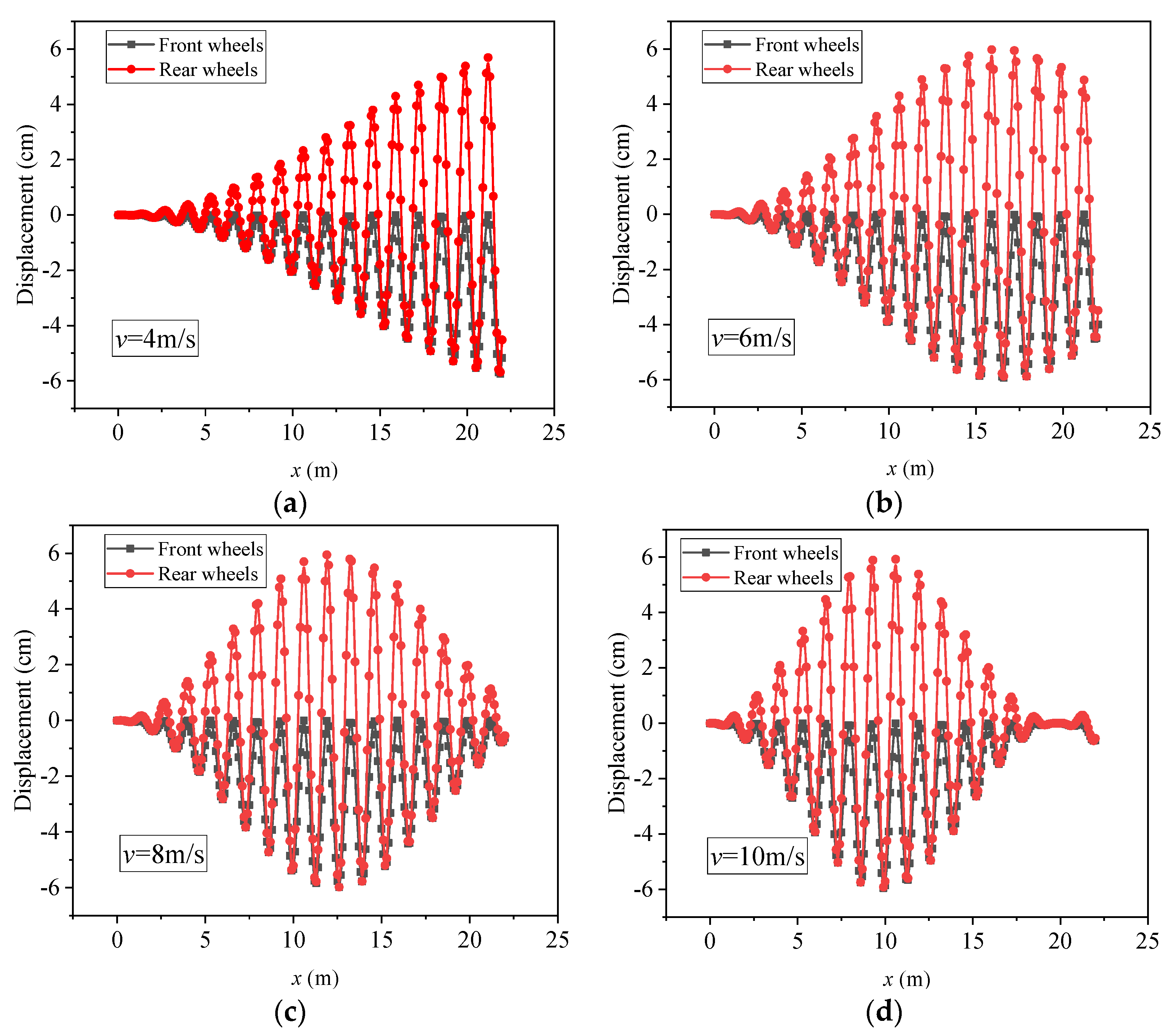
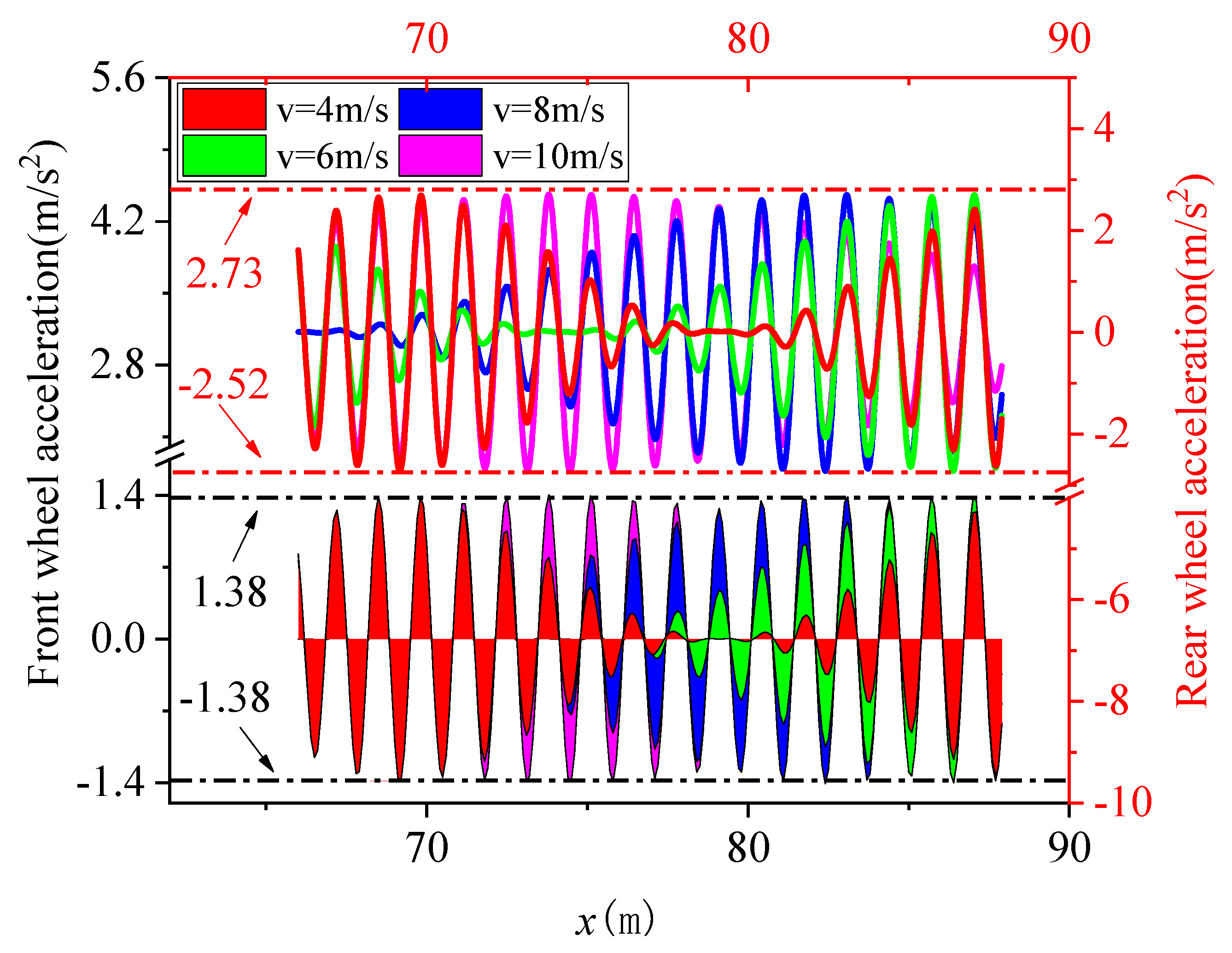
(2) The bus should not drive too fast on uneven roads. For the simplified bus model and excitation pavement discussed in this paper, faster speed means higher displacement and acceleration variation, which is not conducive to passenger comfort. Regardless of the speed, similar displacements and accelerations will ultimately be achieved, but the speed is higher, and the duration of maximum displacement and acceleration is longer.
(3) The spring stiffness ratio of the bus indicates that the bus is more stable when the rear wheels are high in spring stiffness. A bus model with low stiffness, whether climbing or downhill, will produce significant acceleration changes. During the manufacturing process of cars, it is better to ensure that the rear wheels have a higher stiffness coefficient, while appropriately reducing the stiffness of the front wheels.
The results of this paper have certain significance. Engineers can use the differential equations and analytical solutions in this paper to roughly analyze the mechanical response of a moving bus by establishing an actual excitation road surface. These results can provide some guidance for the design and driving of buses. However, the impact of damping has been ignored in this paper. Damping can be taken into account in future bus models to more accurately analyze the mechanical response of buses during driving.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















