1. Introduction
Underwater sensor networks are important tools in the marine environment. They can be applied to gather oceanography data, track marine animals, monitor the pollution of the environment, and defend harbors from intruders [
1,
2]. In an emergency, a large number of sensor nodes can be deployed by planes or ships to cover a large arena, which forms a large-scale wireless underwater sensor network. Due to the ability to deploy and monitor large areas in a short period of time, such sensor networks have become a hot topic in the research field.
A large-scale wireless underwater sensor network has the following features:
Communication among nodes is achieved via acoustic communication. Radio signals attenuate fast in the water, and underwater laser communication is unreliable under the disturbance of water flow. As a result, acoustic communication becomes the only choice for wireless communication in wireless underwater sensor networks.
The communication routing should emerge in a self-organized way. In large-scale wireless underwater sensor networks, it is expected that a message can reach its destination node as soon as possible. However, as nodes are deployed randomly, users are unable to set a routing table for each node before deployment. The communication constraints of acoustic communication make it impossible to assign a central coordinator to control the communication process of the whole network. As a result, we can only seek a self-organized way to coordinate communication in the network.
Communication collision should be avoided as much as possible. For underwater acoustic communication, if one node hears multiple signals at the same time, it is unable to parse the information included in any signal. The same thing happens when it hears a signal while speaking at the same time. These phenomena are called communication collisions. When a communication collision occurs, the sender node needs to resend the message, extending the time for a message to reach its destination.
The aforementioned features make currently available self-organizing schemes not applicable in an underwater environment. For example, under a time division multiple access (TDMA) framework [
3] there are two kinds of schemes to coordinate the self-organizing communication process for radio communication. The first type of scheme is developed following the idea of “collision detection and resend”, such as the famous Aloha protocol. In these schemes, a node tries to send a message in a slot, and once a collision happens, it will resend the message later in another slot. For radio communication, each slot lasts only several microseconds or less. Thus, it can endure wasting time. However, for acoustic communication, each slot lasts several seconds, and thus wasting time is unaffordable, making these protocols an unfavorable choice. Other schemes have been developed following the idea of “constructing an optimized routing table via communication”, such as the method proposed in [
4]. In these schemes, an extra message needs to be conveyed to coordinate the communication. Taking the method in [
4] as an example, nodes need to send the IDs of all their neighbors, their second-order neighbors (i.e., neighbors’ neighbors), and slots occupied by each of these nodes. As a result, a node can obtain information about all its first- and second-order neighbors to decide which slot it should occupy. The drawback of this method is that the extra data occupy much communication capability for acoustic communication. Consequently, a method to coordinate the acoustic communication process in a large-scale wireless underwater sensor network is necessary.
In this paper, we propose a coordinator to coordinate communication for a large-scale wireless underwater sensor network. It is developed under the TDMA framework and consists of a slot distributor and a forwarding guide. The slot distributor is used to determine which slot the current node should occupy. An ecological niche- and virtual pheromone-inspired scheme is used to encourage the current slot to occupy more slots, while a collision resolver eliminates conflicts when multiple nodes try to occupy the same slot. Finally, the network can converge to a state where no communication collisions exist. The forwarding guide then decides how to transmit a message packet to the base station promptly. This is achieved by defining a metric called expected wait, which indicates the expectation of the wait-time needed before a message packet is out, with the message packet received at a random time. Based on this metric, the forwarding guide can provide the ID of the next node that should relay the message so that the message can travel to the base station following the shortest path. The effectiveness of this coordinator has been proved with mathematical analysis and simulation experiments.
The rest of this paper is organized as follows. In
Section 2, the works related to this paper are introduced. In
Section 3, we introduce the problem and provide the framework of the communication coordinator of this paper. Then, in
Section 4 and
Section 5, the components of the coordinator are introduced in detail, with
Section 4 providing the slot distributor and
Section 5 giving the forwarding guide. Then, in
Section 6, the performance of the method is verified with simulation experiments. Finally, we conclude this paper in
Section 7.
2. Related Work
Underwater communication plays an essential role in underwater wireless sensor networks (UWSNs) [
5]. To meet increasing exploitation demands of submarine resources, various underwater communication devices and methods have been proposed [
6,
7]. The technologies for the transmission of wireless underwater communication can be classified into three categories, i.e.,
radio frequency (RF) communication, optical communication, and
acoustic communication [
8]. Each technology is reviewed in detail in the following sections.
RF communication technology is unsuitable for underwater environments since the high conductivity of seawater severely affects the propagation of electromagnetic waves [
9]. Che et al. [
10] have found that RF communication can be used in shallow-water environments. However, RF communication technology still suffers from many limitations such as serious signal interference by environmental noise [
11] and huge energy loss in the propagation process [
10]. Studies have proved that the RF data rate varies from 1 to 10 Mbps [
12], and the communication distances are only a few meters [
13].
Compared to RF technology, optical communication technology exhibits a better data rate. Hanson and Radic revealed that the data rate of optical communication reached up to 1 Gbps [
14]. However, the reliable communication distance is only tens of meters, from about 2 to 25 m [
15]. Zhang et al. found that the attenuation of optical signals of different frequencies underwater varies, and the blue–green optical signal has a smaller propagation attenuation [
16,
17]. Moreover, the attenuation and interference of optical signals are also affected by different water environments. Therefore, optical communication is more disadvantageous to underwater communication than RF communication [
18].
Acoustic communication possesses more advantages than the other two technologies for underwater environments [
6], and its communication distance can reach several kilometers [
19]. Due to the speed difference between sound and electromagnetic waves [
20], there exist three main losses—spreading loss, absorption loss, and scattering loss—that affect the propagation distance of acoustic waves [
21]. Li et al. show that the data rate of sound waves is only 0.6 to 50 Kbps [
22]. To address the problem of low acoustic wave propagation rates and the increasing number of deployed devices, wireless sensor networks (WSNs) [
5] have become an efficient tool in the underwater environment.
WSNs, however, suffer from serious problems such as resource allocation, interference management, anti-blocking, and deafness [
5]. Zhou et al. used MAC protocol, which focuses on improving the performance and efficiency of communication [
23], in their study to solve such problems in WSNs [
24]. Zhang et al. indicated that it is significant to analyze MAC protocols in the study of WSNs [
25]. Han et al. found that in WSNs, MAC protocols operate at the top layer of the physical layer [
26]. Meanwhile, MAC protocols always consider energy efficiency [
27]. All these elements are crucial for the lifetime and efficient operation of WSNs.
Nonetheless, the MAC protocols used in terrestrial wireless sensor networks (TWSNs) are unsuitable for UWSNs because these MAC protocols exhibit low bandwidth, low throughput, high energy consumption, and high propagation delay [
28,
29,
30]. Time synchronization in UWSNs is another difficult factor because effective operation cannot be confirmed between sensor nodes and higher propagation delay [
31], which leads to too many re-transmissions and collisions in UWSNs [
32]. There exist many MAC protocols used for UWSNs, such as OFDMAC, UW-OFDMAC, ED-MAC, and DL-MAC [
23]. However, they cannot meet all the requirements in different underwater environments. To conclude, it is imperative to leverage a variety of methods to improve the MAC protocol in acoustic communication, such as using a learning machine to make sensors predict possible scenarios in real time [
33]; studying for cross-layer design can improve the efficiency of MAC protocols [
34].
3. Problem Statement and Solution
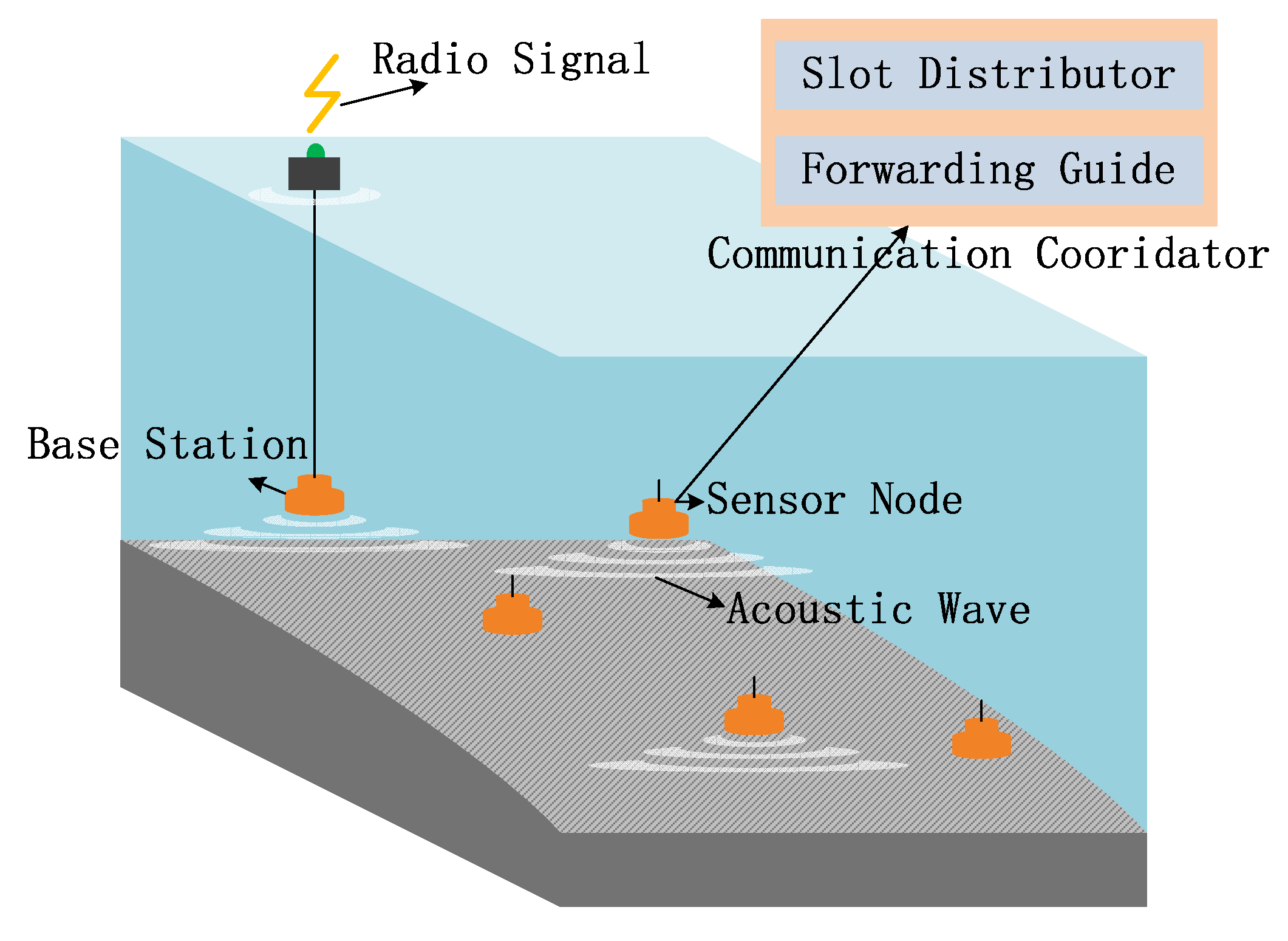
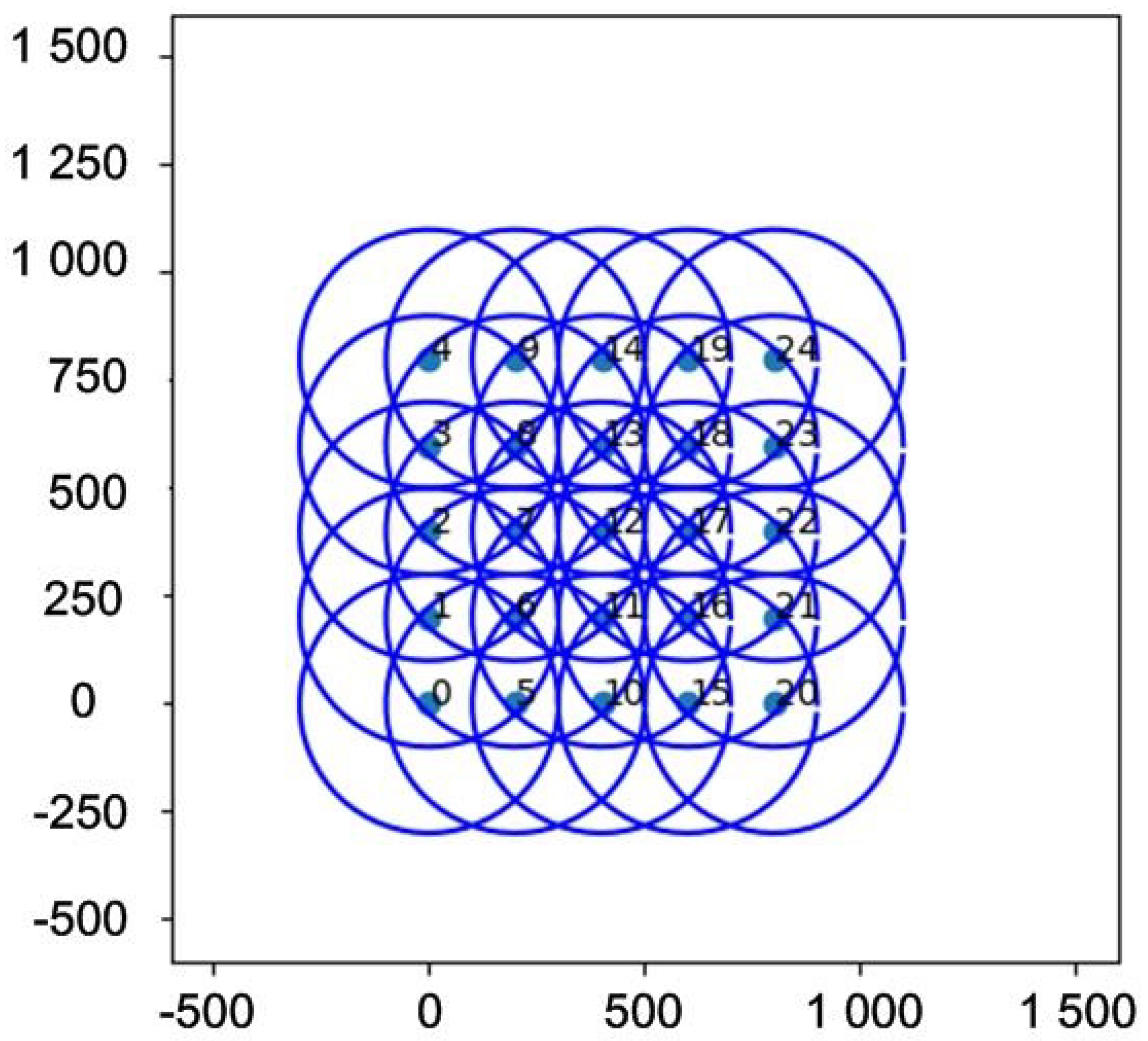
The problem that we seek to solve in this paper is to obtain a scheme to coordinate the wireless communication of nodes in a large-scale wireless underwater sensor network. As shown in
Figure 1,
N sensor nodes are randomly deployed into the area of interest by a ship or a plane, where
N can reach tens, hundreds, or thousands. Once deployed, these nodes sink underwater and float at a certain depth, collecting information within their detection ranges. As all nodes are underwater, they can only communicate with each other via acoustic signals, with the communication range being
r.
Here it is assumed that a high-frequency acoustic signal is adopted, and thus r is of hundreds of meters, with communication speed being several Kbps. Among these nodes, there is a special node called a base station that is connected to an antenna floating at the surface of the water. Thus, the data collected by other nodes are transmitted to the base station node jump-by-jump via acoustic communication and are finally sent to the control center via radio signals by the base station node. Consequently, even though nodes can be deployed randomly, they must form a connected graph (treating nodes as vertexes and assigning an edge between a pair of nodes whose distance is less than r), otherwise messages from some nodes are unable to reach the base station.
With acoustic communication, if one node hears multiple signals at the same time, or it hears signals while speaking at the same time, the node is unable to parse the information contained in the signal. In this paper, this phenomenon is called communication collision.
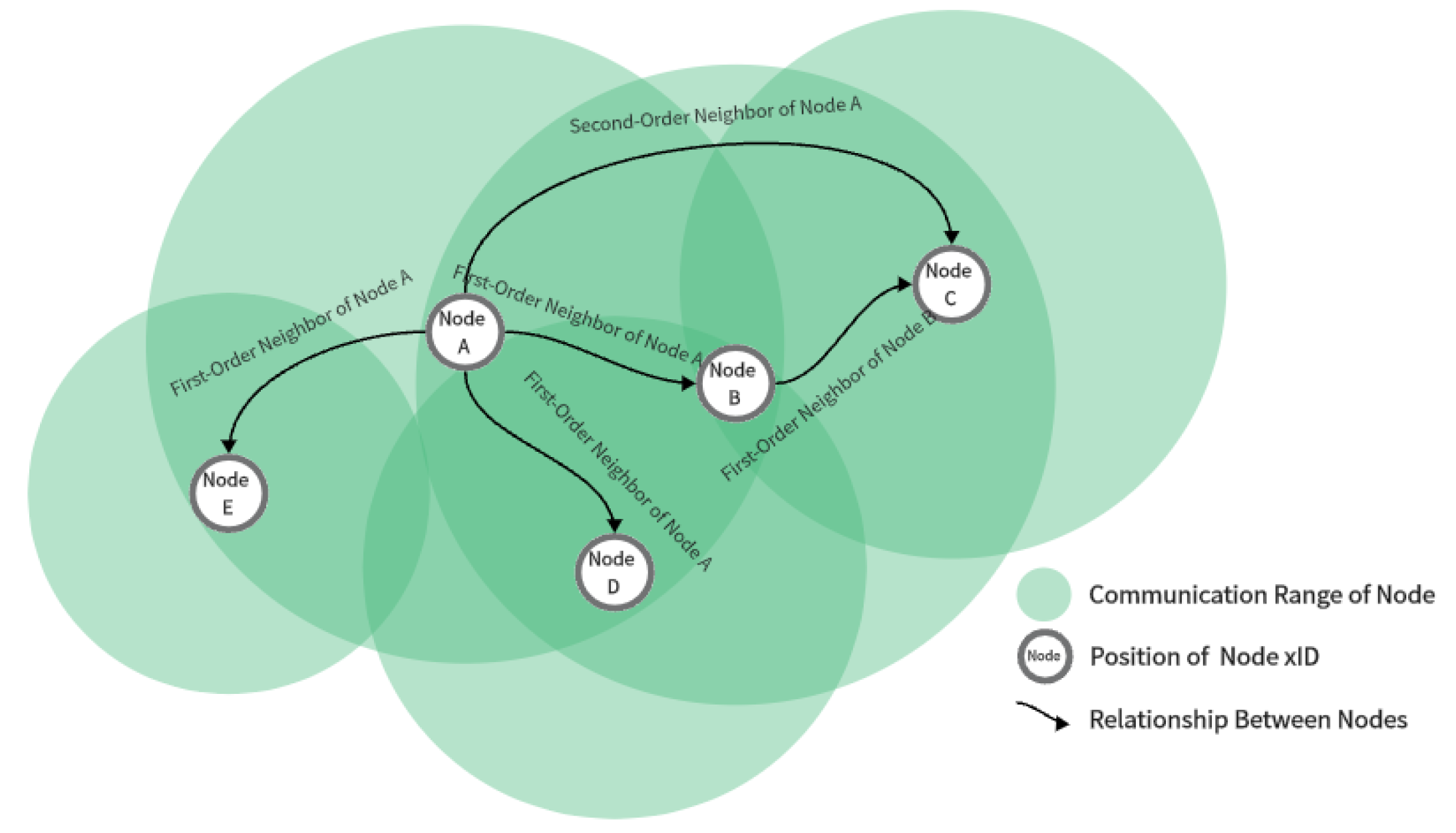
To define this concept formally, let us define
as the distance between Nodes
i and
j. If
, we call Node
j the first-order neighbor of Node
i, and vice versa. Further, if there exists Node
k that satisfies:
then we call Node
k the second-order neighbor of Node
i. Intuitively, a second-order neighbor represents a neighbor’s neighbor. Note that the neighbor relationship is defined based on the relative position of nodes. If the nodes’ positions change, the neighbor relationship may also change. In the following sections, variables defined for first-order neighbors are indicated with subscript
and for second-order neighbors with subscript
. The subscript
indicates variables with both first-order neighbors and second-order neighbors. The definition of the neighborhood is shown in
Figure 2.
According to the definition of communication collision and neighborhood relationship, it can be obtained that for Node i, let be the set of all its first-order neighbors and be the set of all its second-order neighbors. If the following conditions are satisfied, no communication collision will happen on Node i. The conditions are:
At most one member in speaks at the same time.
When i speaks, no node in speaks.
From the conditions above, we can conclude that for the whole network, if no node speaks at the same time as any of its first-order neighbors or second-order neighbors, then no communication collision exists in the network.
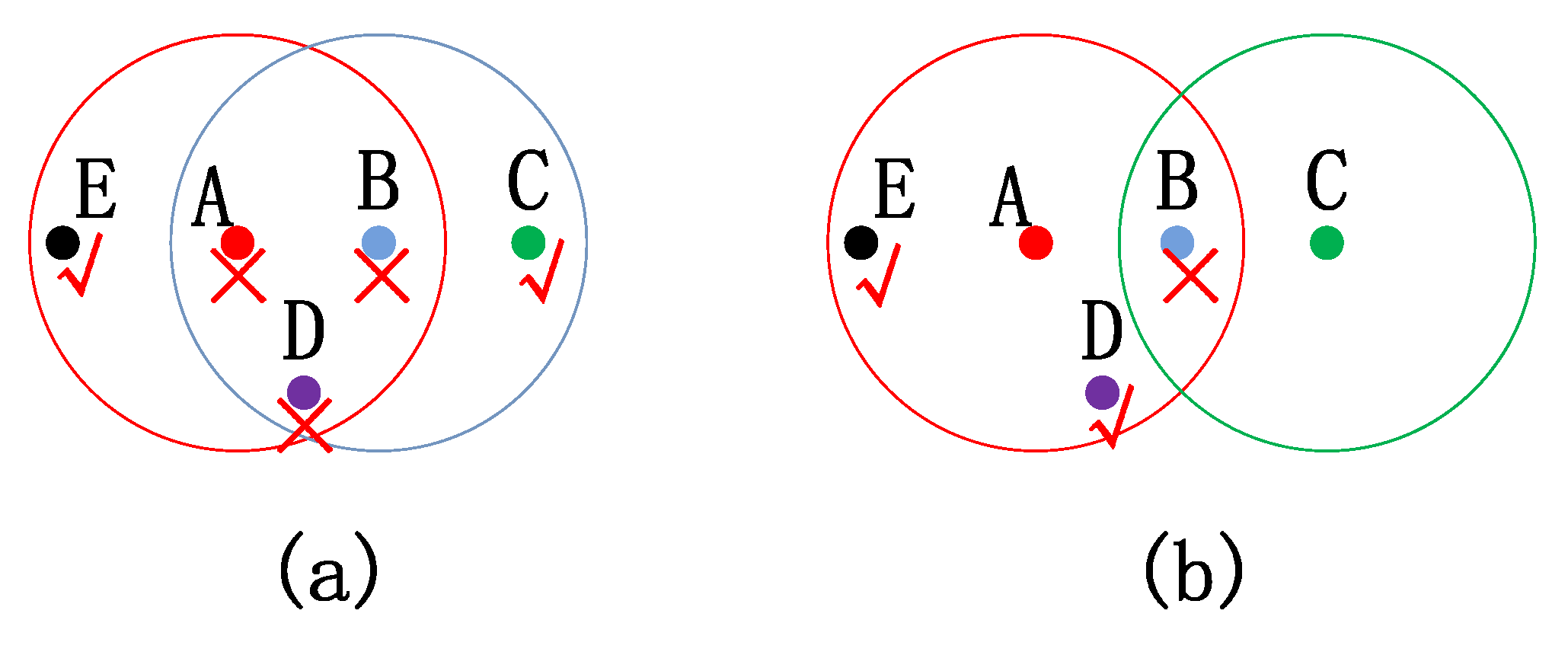
In the network, a node can detect two types of collisions as follows
Collision with its first-order neighbor. When a node speaks at the same time as its first-order neighbors, it is able to detect this collision.
Collision of multiple first-order neighbors. For a node, when multiple of its first-order neighbors speak at the same time, this node is able to detect this collision. However, if the speaking neighbors themselves are not first-order neighbors to each other (i.e., they are second-order neighbors to each other), then these speaking neighbors are unable to detect this collision.
The collision situations are shown in
Figure 3.
For the sensor network, it is expected that messages can be sent from any node to its destination node (i.e., the base station) successfully and as fast as possible. It is best if no collision happens in the network. As nodes are randomly deployed and the number of nodes is large, the communication process should emerge in a self-organized way. To achieve this goal, we propose a communication coordinator in this paper. As shown in
Figure 1, each node in the network is equipped with the same coordinator.
The coordinator is developed under a fixed-length TDMA framework as illustrated in
Figure 4. In the framework, time is divided into a sequence of communication frames, with each frame consisting of
N communication slots, the same as the number of nodes in the network. Each slot is assigned an ID sequentially. Thus, for each node, there exists a slot whose ID is the same as the ID of this node. The slot is called the identical slot of the node.
The TDMA framework is adopted because it can help extend the working environment of our method. The speed of an acoustic signal is affected by several factors, such as the water temperature, water pressure, and so on. Thus, in different environments the communication speed is not the same. Under the TDMA framework, the minimum time unit for communication is a communication slot. If we set the communication slot properly, i.e., within the duration of a slot, all nodes within the range can finish the receiving process (the time for signal traveling and data parsing) under the worst situation, and the method can always work under different conditions. In this paper, high-frequency communication devices are adopted, so the communication range is several hundred meters, and the communication speed is several Kbps (generally 1–2 Kbps). As information can be parsed fast, the time for communication is mainly spent on signal traveling. Considering the speed of an acoustic signal in water is around 1500 m/s, if the size of each message packet is set to 1–2 Kbit, setting a slot to be several seconds is enough for all nodes within the communication range of the sender node to receive the signal and parse the data. As the slots are set long enough, we can ignore the impact caused by the working conditions.
Based on this framework, a communication coordinator is proposed. The coordinator consists of a slot distributor and a forwarding guide. Via interaction with neighbors, the slot distributor provides a list corresponding to the communication frame indicating the nodes occupied by the current slot. Details of the slot distributor will be introduced in
Section 4, where we explain how a node occupies proper slots and the network can converge to the state without collision. When a node receives a message packet, the forwarding guide decides if it should be ignored or sent to a certain neighbor. Details are in
Section 5, where we prove the message packet can be sent to its destination along the path with the shortest expected wait.
With the communication coordinator, the message packet sent by a node contains the following information:
with
indicating the ID of the speaker, and
containing the IDs of the speaker’s first-order neighbors.
is a set generated by the collision resolver. On receiving
, a node needs to abandon the occupation of slots in this set except for its identical slot. The variable
indicates the cost of the current node to send the message to the base station, whose initial value is
∞ unless the node itself is the base station (then, the value becomes 0), and
indicates the ID of the next node that should relay the message packet so that the packet can be sent to the base station jump-by-jump. The initial value of
is
, indicating that the node cannot decide on a successor.
contains the data collected by the sensor that need to be sent to the base station.
The message packet a node receives contains the same information. To avoid confusion, in the rest of this paper, we use superscript
to mark the information of the sender, so the received message packet is written as
For readers to better understand this paper, the definitions of key variables are summarized in
Table 1.
4. Ecological Niche-Inspired Slot Distributor
With the slot distributor, each node can obtain a list called the communication table as
, with
A node can speak at the slot it occupies. It is expected that with the slot distributor, each node occupies some slots so that the system achieves:
1. No collisions exist in the whole network;
2. All nodes occupy a greater number of slots;
3. The slots occupied by a node are scattered evenly in the frame.
Items 1 and 2 indicate that communication resources can be used efficiently and sufficiently; 3 indicates that when the need of sending a message packet appears at a random time, it will take less time for a node to wait for a slot it can speak to. Or, formally, in this way, the expected wait formally defined in
Section 5 can be decreased.
To achieve the above goals, the slot distributor consists of two parts. The distributor inspired by phenomena in an ecological system encourages nodes to occupy more slots, and slots scattered evenly have a higher probability to be occupied. The collision resolver can eliminate collisions generated by the distributor.
4.1. Slot Distributor
An ecological niche describes the ecological role of specie in the ecosystem. Species have different preferences for different resources such as food. Different species living in the same region usually occupy different ecological niches or show different preferences for similar resources. Otherwise, conflicts occur and war among species happens until a winner is generated. This phenomenon inspires us to treat nodes as species and communication slots as resources. Thus, the preferences of nodes for slots can be used to mimic the ecological niche of species. If nodes show different preferences for slots, they are encouraged to occupy slots with different probabilities. As a result, nodes try to occupy more slots, while the chance of collision can be decreased. If the preference is scattered in a way that can guide nodes to occupy slots evenly scattered in the frame, the expected wait can be decreased.
With an ecological niche, nodes are encouraged to occupy slots, which introduces collisions into the sensor network. Even though the chance of a collision can be decreased, it cannot be eliminated with an ecological niche. Therefore, we introduce the phenomenon of pheromone markers. In the wild, animals deploy pheromone markers to transmit messages. For example, ants use pheromone clues to tell their mates the path to food, and wolves use urine to mark the ownership of territory. Wounded fish can use a pheromone to mark the existence of danger in the environment, and others avoid visiting these marked territories. Similarly, if a node fails to occupy a slot, it can deploy a pheromone there. Once the density of the pheromone reaches a threshold, the node stops attempting to occupy the slot. As a result, no more communication collisions are introduced into the sensor network.
Following the above ideas, we propose the ecologically inspired slot distributor shown in Algorithm 1.
As shown in Algorithm 1, initially, all nodes only occupy their identical slots. List shows the pheromone density in each slot. Once a robot fails to occupy a slot, it deploys a pheromone there. Once the density reaches a threshold, the robot stops attempting to occupy the slot again. Initially, the pheromone density in each slot is set to a small value, indicating they can all be occupied, as in Line 1. Then, in Line 2, for the first several frames, nodes do not try to occupy slots other than their identical slots. In this stage, no collision exists in the network. When a node receives a message packet, the node can obtain the ID of the sender and the first-order neighbors of the sender from the message packet. Apparently, the sender is a first-order neighbor of the node, and the sender’s first-order neighbors may be the node’s first-order neighbors or second-order neighbors. Thus after the first several frames, all nodes can obtain a set containing all their first- and second-order neighbors. Then, a node can calculate its preference for all slots and the preference for all its neighbors. Then the node occupies the slots in which it has a larger preference than those of all its neighbors, as in Line 3 in Algorithm 1.
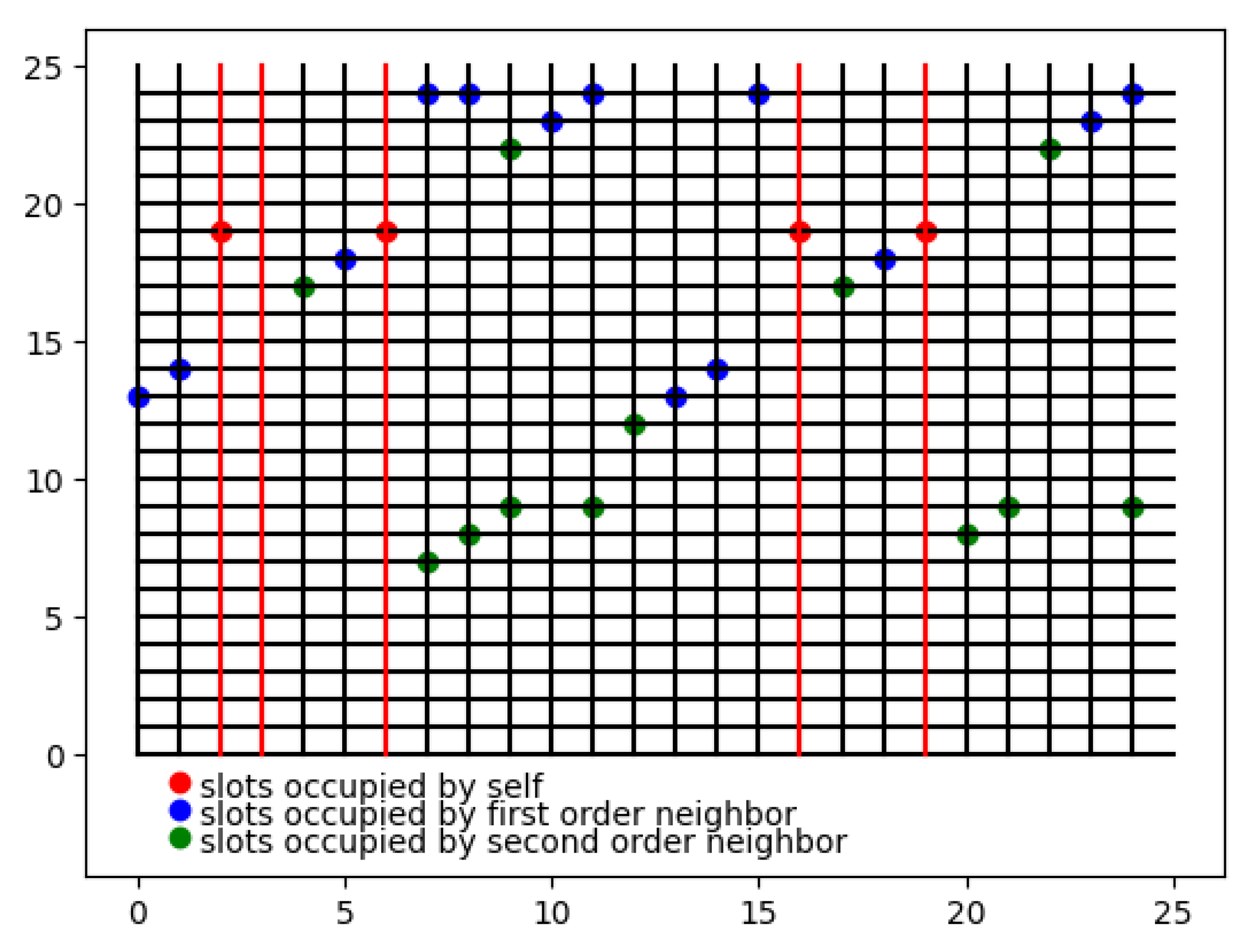
The preference is calculated as Algorithm 2. An example is shown in
Figure 5.
| Algorithm 1 Slot distributor |
- 1:
Set initial values: , , , - 2:
Wait for several frames to obtain set containing IDs of all first and second-order neighbors - 3:
Calculate ecological preference of self and all neighbors , - 4:
if . - 5:
while New slot with address= do - 6:
if then - 7:
delete from - 8:
if then - 9:
keep occupying this slot by setting - 10:
else - 11:
Increase pheromone density by . - 12:
end if - 13:
end if - 14:
if then - 15:
Try to occupy this slot: , - 16:
end if - 17:
end while
|
| Algorithm 2 Calculation of preference |
- 1:
Treat the frame as a circle, as shown in Figure 5- 2:
Set the preference of the identical slot as 1 - 3:
Put identical slot in set - 4:
while Not all slots have been assigned preferences do - 5:
- 6:
for in do - 7:
Search the circle clockwise until find the next slot in , and record this slot as - 8:
Find the center slot between and , and name it . - 9:
Calculate the preference of as - 10:
Put into - 11:
end for - 12:
- 13:
end while
|
Then, in Line 4, the slot distributor starts to work. At the beginning of a new slot, a node first updates the pheromone in the slot, as in Lines 5–12. If the node tries to occupy a slot recorded in and the slot is occupied successfully because it is still in , the node occupies this slot by setting the pheromone value to 0. If it fails, the pheromone value in this slot is increased and will eventually become larger than the threshold . Then, the node will never try to occupy this slot again. Then, in Lines 13–16, the node checks if it should try to occupy the current slot. If the slot is not in yet but the pheromone density is below the threshold, there is a chance that the node will try to occupy the slot. The chance of a node trying to occupy a slot is related to its preference for the slot. Nodes are encouraged to occupy slots in a more-evenly distributed manner.
As a result, with Algorithm 1, the communication table is updated. The ecological niche encourages nodes to occupy proper slots, while virtual pheromones can weaken the tendency of changing , so finally will keep still. Updating of may introduce collisions into the network, which can drastically hinder the communication of the network in the first several frames. A trick to solve this problem is to not call the slot distributor every frame but to call it once every 5–10 frames. Then there will be fewer collisions in the first several frames and can be improved gradually, which can be solved by the collision resolver.
4.2. Collision Resolver
The collision resolver is shown in Algorithm 3. It can update communication table according to the received message. The message packet received contains a set of slots the sender asks its neighbors to abandon as . The algorithm also provides , which contains a set of slots that the current node asks its neighbors to abandon.
Each node maintains two lists: and . Let be the element of . Then indicates the current node should ask its first-order neighbors to abandon slot i. Let be the element of . Then indicates a current node has broadcast a message at slot k to ask its neighbors to abandon slot i.
In the algorithm, Lines 3–7 describe the behavior of a node at the slot it occupies. It sends a message packet containing
asking its neighbors to abandon slots in
and record to which slot the requirement is sent in
. Lines 8–26 describe the behavior based on the message received. If the current node collides with any of its first-order neighbors, it will abandon the current slot unless the slot is its identical slot, as in Lines 8–12. In Lines 13–22, if multiple first-order neighbors speak at the same time, the current node checks if it has asked neighbors to abandon this slot before according to
. If so, the current node abandons the current slot unless it is its identical slot. Otherwise, the current node records this slot in
. In the case that the current node successfully receives a message packet, the node abandons slots in
in the message packet except for its identical slot, as in Lines 23–25. Finally,
is updated in Line 26.
| Algorithm 3 Collision resolver |
| Input: Communication table , Communication packet received, contains |
| Output: Update communication and generate that needs to be packed in the message packet to send. |
- 1:
- 2:
while New slot with address= do - 3:
if then - 4:
- 5:
- 6:
- 7:
end if - 8:
if collided with first-order neighbor then - 9:
if then - 10:
- 11:
end if - 12:
end if - 13:
if receive multiple signals while self not speaking then - 14:
if then - 15:
- 16:
if then - 17:
- 18:
end if - 19:
else - 20:
- 21:
end if - 22:
end if - 23:
if successfully receives one message packet and then - 24:
- 25:
end if - 26:
- 27:
end while
|
With the collision resolver, the network can converge to the state where:
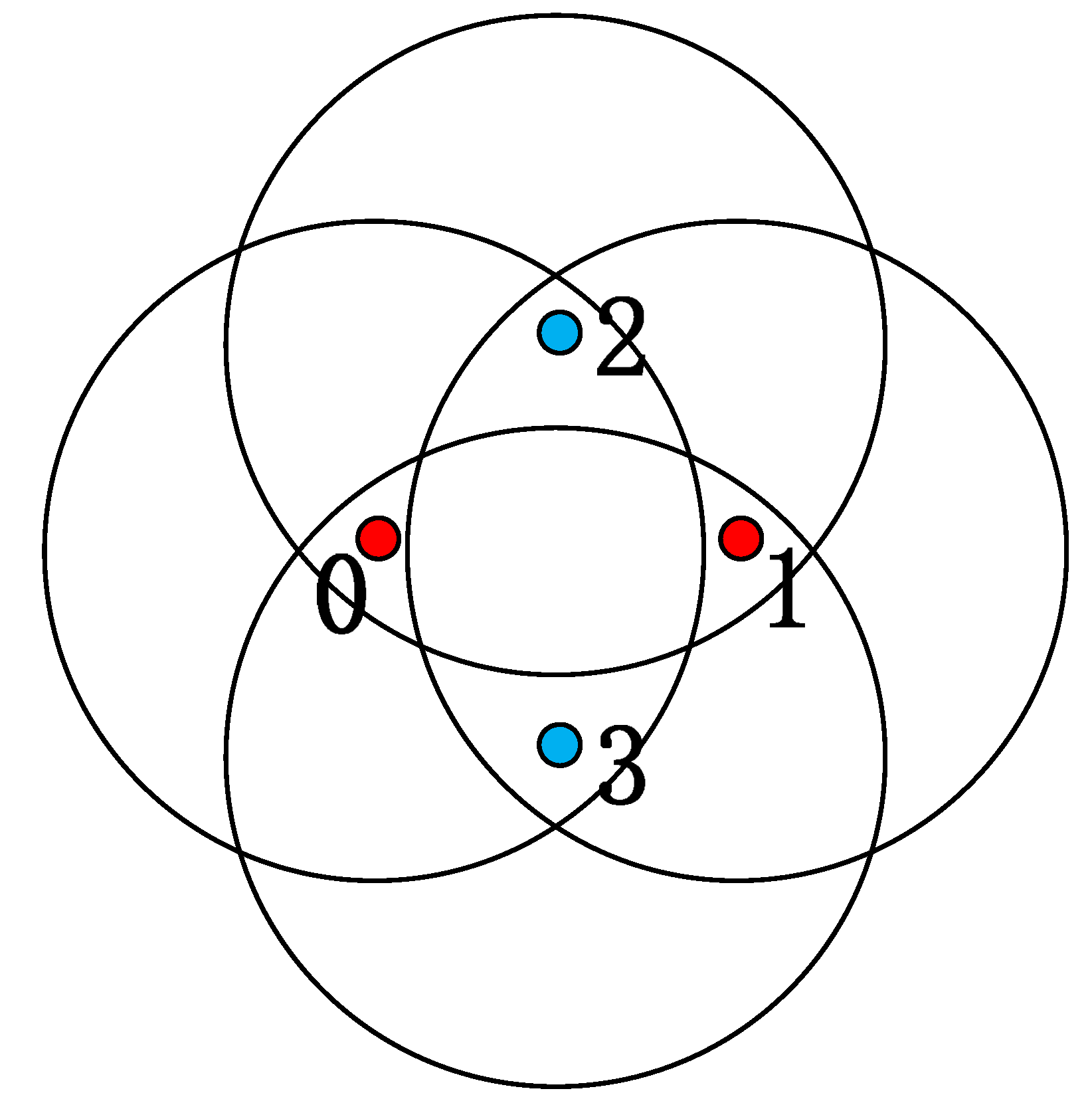
This is because with Algorithm 3, if a collision occurs between a pair of first-order neighbors and if the slot is not the identical slot of either of the nodes, both nodes abandon the slot. If the slot is the identical slot of a node, then the node keeps this slot and the other node abandons the slot. When a collision occurs among second-order neighbors, the nodes cannot realize this collision, but their common first-order neighbor will receive multiple signals and realize the existence of the collision. Then, the node will ask all its neighbors to abandon this slot. On receiving this message, nodes will abandon this slot, except for the identical node. Generally, collisions can be eliminated with the operation above. However, there is a chance that multiple second-order neighbors occupy the same slots while they share the same first-order neighbors, and these first-order neighbors also occupy the same slots. In this case, no message packet can be parsed, because every signal a node sends will collide with signals sent by other nodes. We call this situation communication lock, as shown in
Figure 6. To solve this problem, we use
to record at
that the current node has asked neighbors to abandon
. If a collision happens again in slot
, the current node can realize that its neighbors failed to abandon
because of failing to parse the signal. The sub-network is trapped in a communication lock. Then, the current node will abandon
if this slot is not its identical slot. As a result, once a collision occurs at a slot, related nodes will abandon this slot (except for the identical node) so the collision can be eliminated. As a node will always occupy its identical slot, each node occupies at least one slot in the frame.
5. Forwarding Guide
With the forwarding guide, each node can obtain a proper first-order neighbor that should relay the message packet so that the message packet can be sent to its destination jump-by-jump. Here, we introduce the forwarding guide in detail and prove the convergence of the method.
5.1. Expected Wait
In this section, we define the concept of expected wait, with which the cost to a node to relay a message packet can be measured. Considering communications among nodes in a network, the network is usually abstracted as a weighted graph model, with nodes being the vertexes and edges being built between pairs of neighbors. It is expected that a message packet can be transmitted to its destination following the shortest path, i.e., taking the least time.
The weights of the edges are usually a metric in relation to the time spent on communication, such as the time spent on signal propagation or time spent on signal parsing. However, in our method, as we are using the TDMA framework, we set the slot long enough so that the whole process of signal propagation and packet decoding can be done within one slot. Thus, the time spent on message propagation can be treated as a fixed value, i.e., the length of the slot. Note that it does not play a main role in message transmission. A more important thing that should be taken into consideration is that if a node receives a message packet that should be relayed, how long, or how many slots, it needs to wait before sending this message packet.
As in
Section 4 with the slot distributor, finally each node will occupy several slots with different addresses (i.e., positions of slots in the frame). Nodes that occupy more slots speak more frequently and take less time to wait before sending a message packet. Even if two nodes occupy the same number of slots, the average time needed to wait is different according to the distribution of the slots.
Thus, we define the concept of expected wait as a metric; it is the average time the slots need to wait before sending a message packet, with the requirement of sending the message packet appearing at a random time. It is defined as:
where
is the length of a slot, and
N is the number of nodes in the network and also the length of the frame;
means the number of slots between slot
i and the next slot occupied by the current node.
5.2. Core Algorithm for Forwarding Guide
The forwarding guide can be described with Algorithm 4. The output of the algorithm is the content that will be packed into the communication packet sent by the current slot as:
The inputs of the algorithm include communication table
, which is provided by the slot distributor, and the key content contained in the message packet received as
We initialize the algorithm in Line 1 and 2, where we define a set to save the IDs of the current node’s first-order neighbors, and to save the costs for each neighbor to send a message to the base station. Initially, the two sets are all empty. Then, the while loop in Lines 3–27 defines the current node’s behavior in relation to relaying messages in each slot. Basically, the behavior is composed of three parts, where Line 4 and Lines 12–14 maintain the neighbors, Lines 5–9 and Lines 15–17 deal with the message content to be sent, and Lines 18–24 search for the best path to relay the message packet.
At the beginning of a new slot in Line 3, the current node deletes the lost neighbor. As in
Section 4, one node should speak at least once during a frame, so if a neighbor fails to speak for a whole frame, it is lost and will be deleted. Then, the current node checks if it should speak in Line 5 and then broadcasts a message packet containing self ID
, the current cost to relay the message packet
, its successor node to relay the message packet
, and all data needing to be sent
. If
, the current node has not established a path to the base station, and no successor exists and
cannot be relayed. Therefore, the node will clear its storage. Otherwise,
will be handed over to another node, so
will be set empty.
On receiving a message in Line 11, the node updates the information about its neighbor by either adding new information or by replacing old information with new information, as in Lines 13–14. If the current node is the successor of the sender, then
is stored and awaiting being forwarded, as in Lines 15–17. Then, in Lines 18–24, the current node tries to update its successor, finding a better way to relay the message. This is achieved by setting the first-order neighbor with the lowest total cost as the current successor. It is proved in
Section 5.3 that the path will converge to the shortest path.
| Algorithm 4 Forwarding Guide |
| Input: Communication table , contained in communication packet received |
| Output: , as information that should be contained in the message packet to send |
- 1:
- 2:
, , if current node is base station and otherwise - 3:
while New slot with address= do - 4:
Update and by deleting neighbors that fail to speak for a whole frame - 5:
if =1 then - 6:
Send message packet containing - 7:
if then - 8:
- 9:
end if - 10:
else - 11:
if receive message packet successfully then - 12:
message packet contains - 13:
- 14:
Update with - 15:
if then - 16:
- 17:
end if - 18:
Calculate expected wait with
- 19:
for do - 20:
- 21:
if then - 22:
, - 23:
end if - 24:
end for - 25:
end if - 26:
end if - 27:
end while
|
5.3. Convergence of the Algorithm
In this section, we explain the convergence of the algorithm. This can be proved with the help of Dijkstra’s algorithm. We model the sensor network as a directed graph model, with nodes being vertexes, composing set V. For edges, to satisfy the definition of the classic Dijkstra Algorithm, for a pair of first-order neighbors, an edge is assigned from the receiver pointing at the sender, with the weight of this edge being the expected wait of the sender. Thus, we obtain the edge set E and the weight set W. Based on this definition, we write the classic Dijkstra Algorithm as Algorithm 5, where indicates the total cost for node s to receive a message packet from node t. Set S stores the vertexes that already find their shortest path to the source vertex s, where vertex s indicates the base station that collects all messages in the sensor network. The weight is the expected wait of t if s is its first-order neighbor. If , . If and s is not a first-order neighbor of t, then .
Following the definitions above, we abstract the part of searching for the forwarding path in Algorithm 4 as Algorithm 6.
| Algorithm 5 Dijkstra Algorithm |
| Input: Directed graph with weight |
| Output: All the shortest paths from source vertex s to every other vertex |
- 1:
- 2:
- 3:
for do - 4:
(when not found, ) - 5:
end for - 6:
while do - 7:
find from the set - 8:
- 9:
for do - 10:
if then - 11:
- 12:
end if - 13:
end for - 14:
end while
|
| Algorithm 6 Abstraction of Algorithm 4 |
- 1:
while True do - 2:
for do - 3:
for do - 4:
if then - 5:
- 6:
end if - 7:
end for - 8:
end for - 9:
end while
|
By comparing Algorithm 5 with Algorithm 7, we can see that both algorithms set the same initial conditions. Lines 5–7 in the Dijkstra Algorithm are used to set a termination condition, while Algorithm 7 does not. However, as the sensor network keeps working, it can be treated that the algorithm will loop forever, exceeding the time needed for convergence, and thus a termination condition is unnecessary. Then, in Algorithm 7,
will not change when
b because the node cannot find a shorter path; the same thing happens in the Dijkstra Algorithm. In the Dijkstra Algorithm, we update
with
, which is currently not in
S while having the shortest path to
s, as in Lines 9–13. Even though
may change in Lines 5–10, it will finally be updated in Lines 11–15, following the same operation in the Dijkstra Algorithm. Thus, the two algorithms are equivalent at this stage, except that for Dijkstra’s Algorithm, nodes need to know the whole graph, while our algorithm can work only based on local information. As a result, with the forwarding guide, the sensor network can finally converge to the state where message packets can be relayed to the base station with the shortest expected wait.
| Algorithm 7 Another form of Algorithm 6 |
- 1:
while True do - 2:
for do - 3:
if then - 4:
for do - 5:
if then - 6:
Nothing will happen - 7:
end if - 8:
if then - 9:
may be updated, but cannot ensure reaching the minimum value - 10:
end if - 11:
if then - 12:
if then - 13:
- 14:
end if - 15:
end if - 16:
end for - 17:
else - 18:
Nothing will happen - 19:
end if - 20:
end for - 21:
end while
|


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}