
A Lyapunov-Optimized Dynamic Task Offloading Strategy for Satellite Edge Computing
Abstract
:1. Introduction
- The satellite topology is highly dynamic, and the ISLs are variable at different moments.
- Each satellite node is hard to manage during its operational phase as the task load changes, making its computing and communication resources change rapidly.
- No defined collaborative strategy between multiple LEO satellites to ensure efficient task scheduling while fully utilizing computing resources.
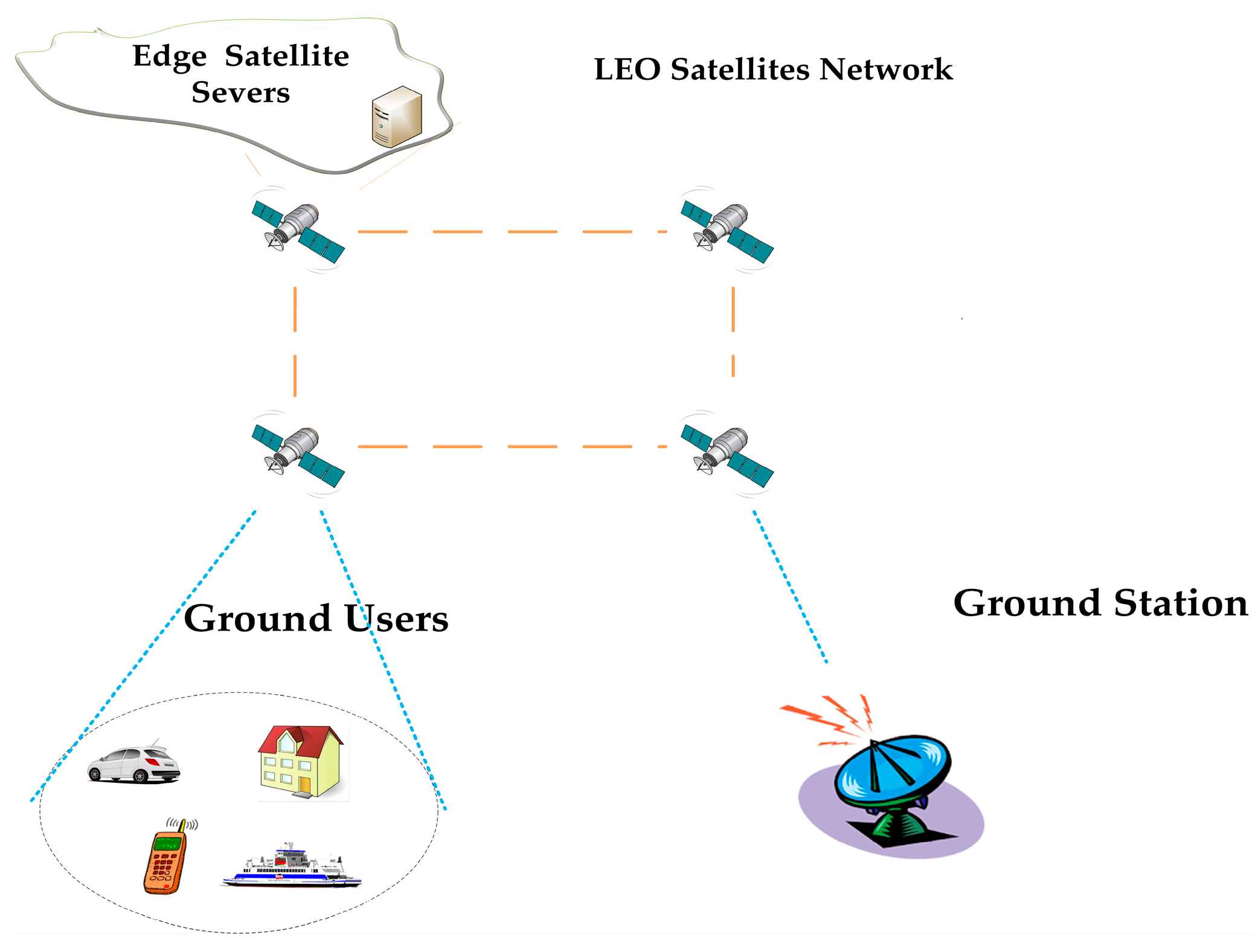
- Consider a satellite edge computing scenario where the satellites in a constellation receive varying task loads. Each mission can be offloaded to any other satellite in the constellation for collaborative computing via an ISL. This problem has not been extensively studied by scholars.
- A strategy for offloading using the Lyapunov and Hungarian algorithms is proposed. The method is straightforward in principle, easy to implement, and has demonstrated superior performance compared with other benchmark algorithms.
2. Related Works
3. System Model and Problem Description
3.1. System Model
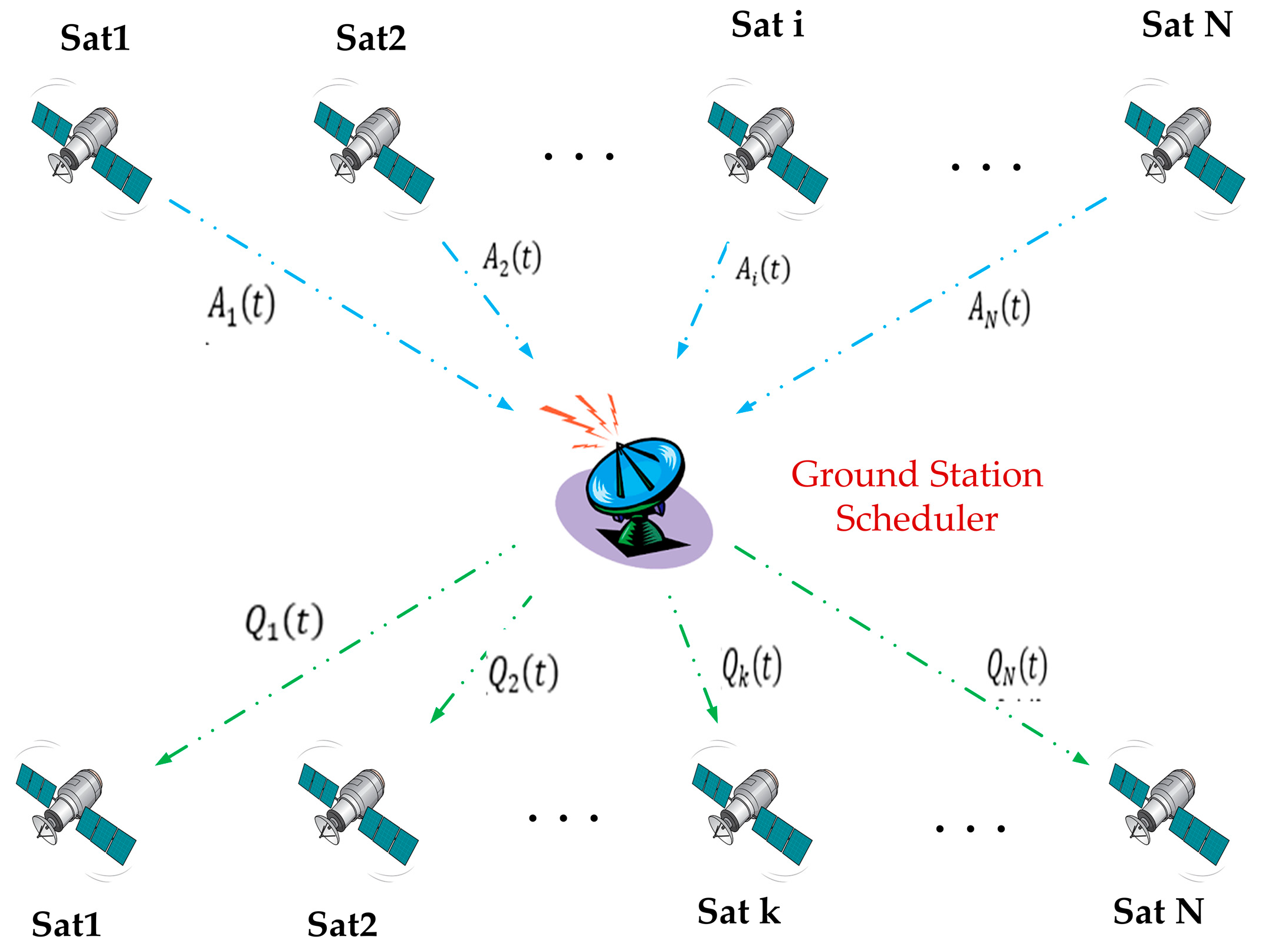
3.2. Task Queue Model
3.3. Offloading Model
3.4. Probelm Formulation
4. Task Offload Optimization Algorithm
4.1. Probelm Conversion
4.2. Offloading Algorithm Based on The Hungarian Method
- For each row in the matrix , identify its minimum entry and subtract it from all entries in that row;
- For all entries equal to 0, mark them as starred zeros, provided that there are no existing starred zeros in the same row or column;
- Cover each column that contains a starred zero. If all columns are covered, proceed to Step 7;
- Repeat the following procedure until all zeros in the matrix are covered: Find an uncovered zero and prime it. If there are no starred zeros in the same row as the primed zero, proceed to Step 5. Otherwise, cover this row and uncover the column containing the starred zero;
- Continue to construct a series of alternating primed and starred zeros until no additional uncovered zeros can be found. Then, proceed to Step 6;
- Locate the smallest entry among all uncovered entries in the matrix. Subtract this entry from all uncovered entries, and add it to all entries that are covered twice. Return to Step 4;
- The algorithm terminates when all entries in the matrix are covered. The set of assignments corresponding to the starred zeros constitutes the optimal solution to the assignment problem.
| Algorithm 1 The DOALH algorithm |
| Input: System parameter |
| Algorithm |
|
|
|
Using the Hungarian algorithm to determine the optimal offloading strategy in the specific time slot; |
Output: The minimum mean value of Cost in T time slots |
5. Simulation and Analysis
5.1. Parameters Setting
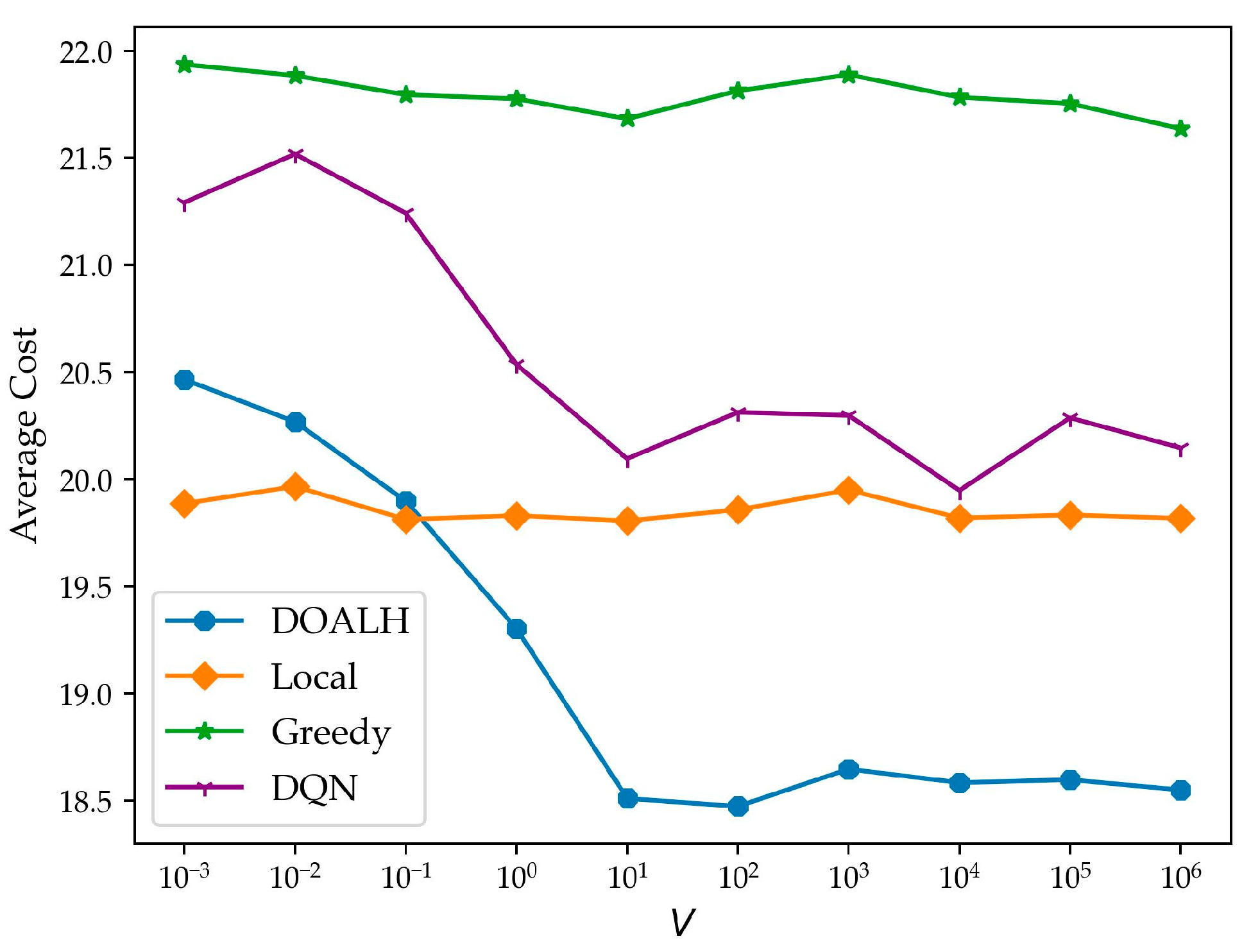
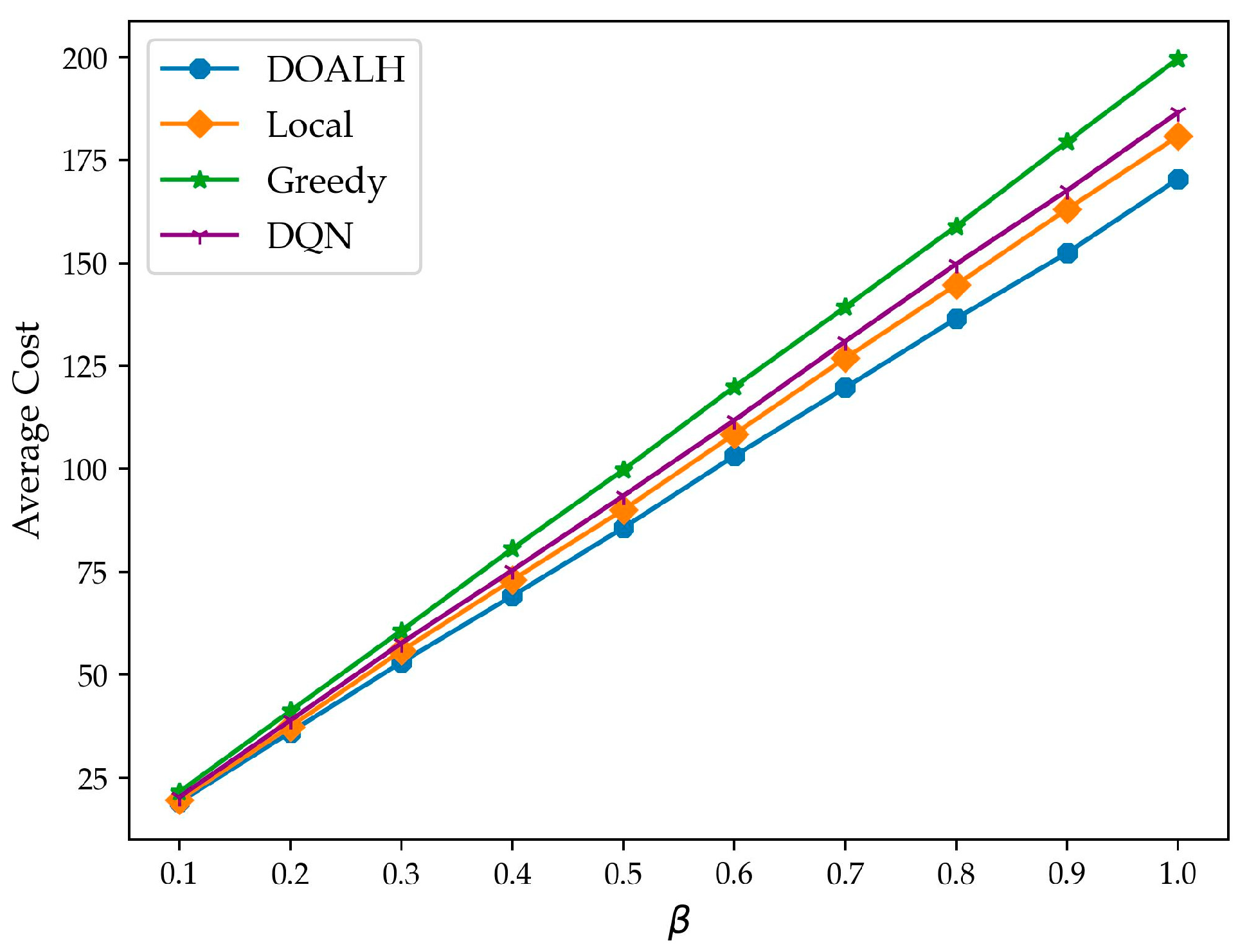
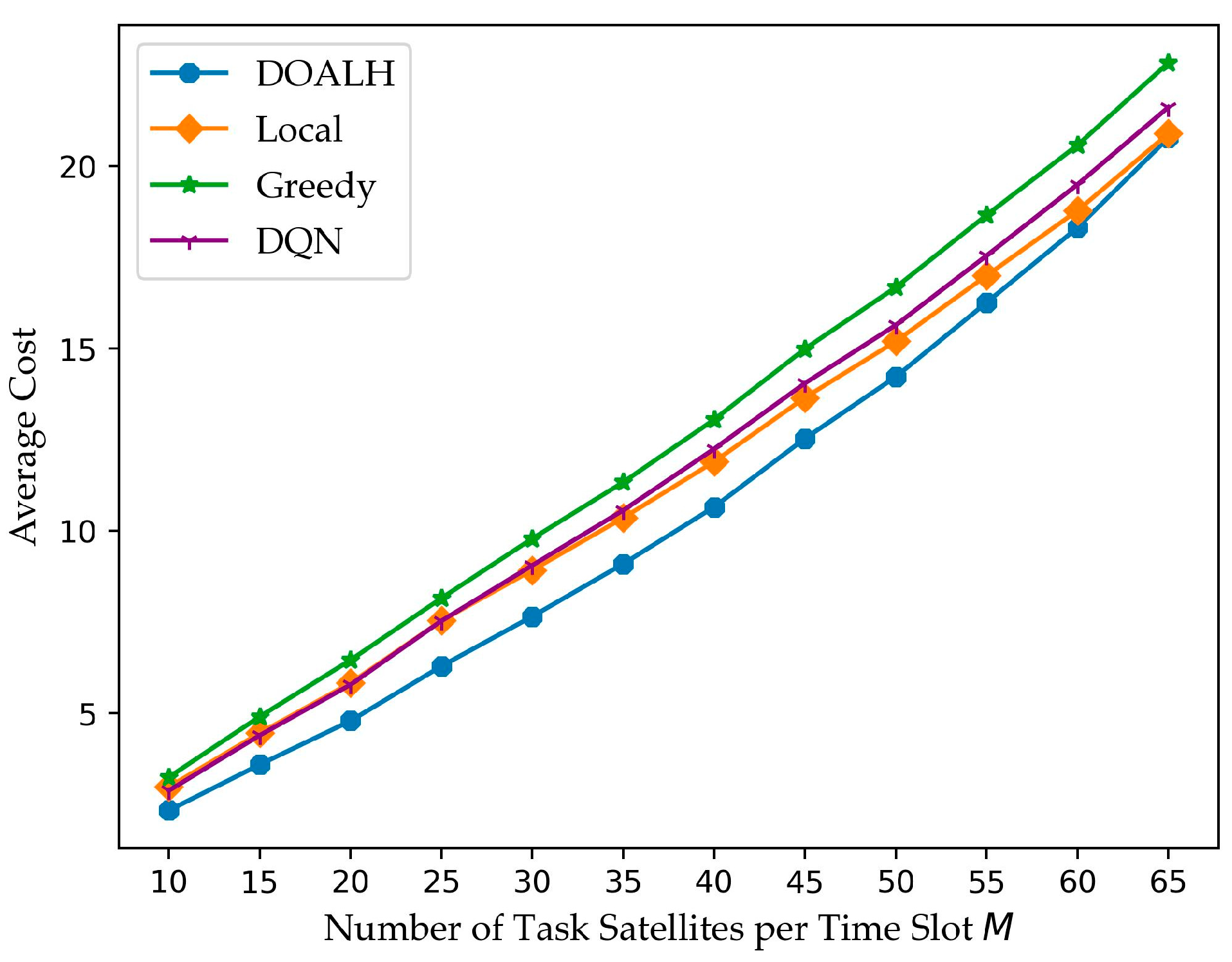
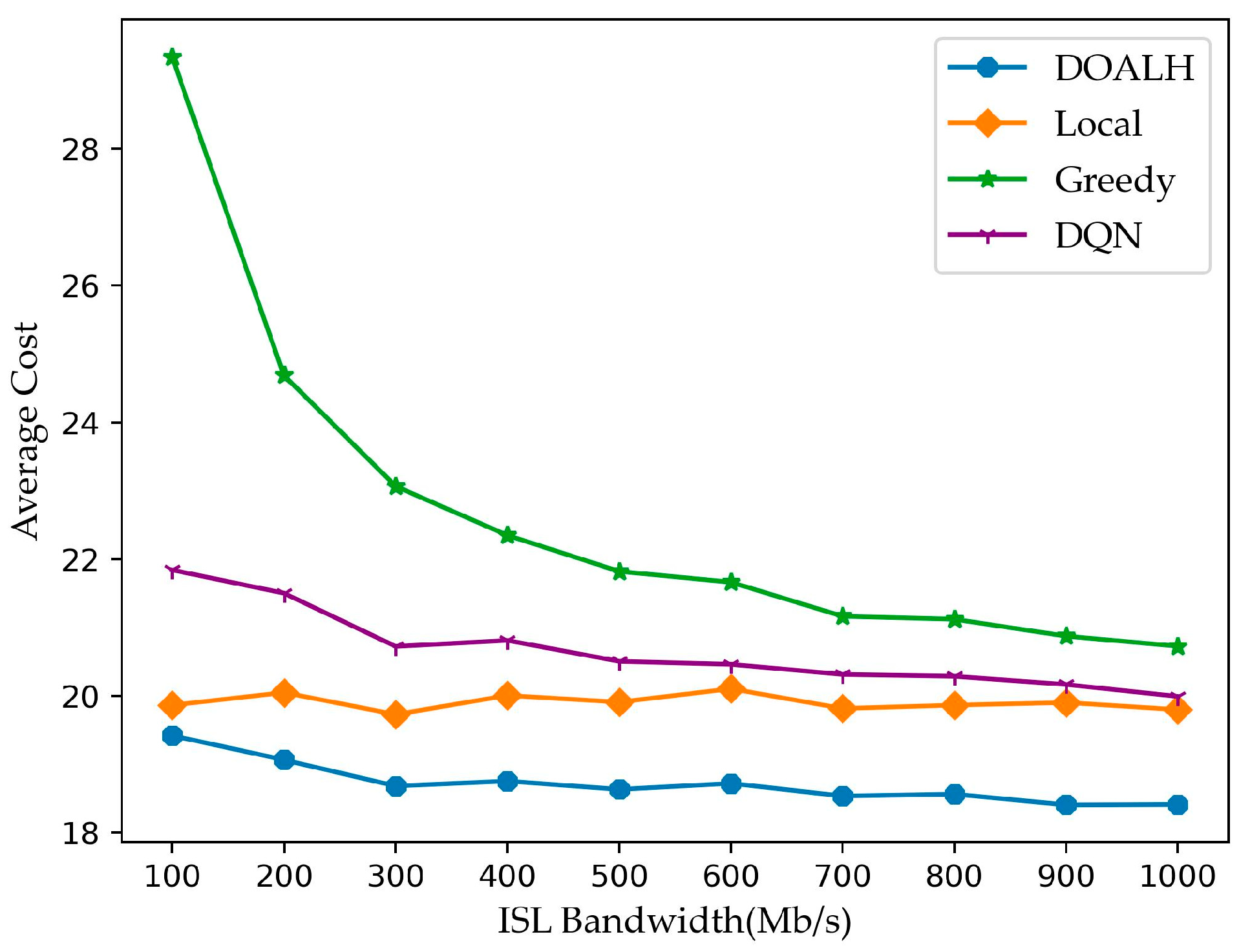
- Local Computing (Local): All tasks are processed solely within the receiving satellite, without any computational offloading.
- Greedy Offloading (Greedy): In each time slot, the task with the highest number of pending tasks is offloaded to the satellite with the lowest task queue for processing.
- DQN Offloading (DQN): In a similar study, the authors modeled the computational offloading process as an MDP and used Deep Q-Networks (DQN) to determine the optimal offloading strategy. The reward function is set as [5].
5.2. Simulation Analysis
6. Conclusions
7. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, X.; Ren, Z.; Cheng, W.; Ji, Z. Inter-satellite cooperative computing scheme driven by business graph in leo satellite network. Space-Integr.-Ground Inf. Netw. 2021, 2, 35–44. [Google Scholar]
- Han, J.; Wang, H.; Wu, S.; Wei, J.; Yan, L. Task scheduling of high dynamic edge cluster in satellite edge computing. In Proceedings of the 2020 IEEE World Congress on Services (SERVICES), Online, 18–24 October 2020; IEEE: New York, NY, USA, 2020; pp. 287–293. [Google Scholar]
- Taleb, T.; Samdanis, K.; Mada, B.; Flinck, H.; Dutta, S.; Sabella, D. On multi-access edge computing: A survey of the emerging 5g network edge cloud architecture and orchestration. IEEE Commun. Surv. Tutor. 2017, 19, 1657–1681. [Google Scholar] [CrossRef] [Green Version]
- Tang, Q.; Fei, Z.; Li, B.; Han, Z. Computation offloading in leo satellite networks with hybrid cloud and edge computing. IEEE Internet Things J. 2021, 8, 9164–9176. [Google Scholar] [CrossRef]
- Leng, T.; Li, X.; Hu, D.; Cui, G.; Wang, W. Collaborative computing and resource allocation for leo satellite-assisted internet of things. Wirel. Commun. Mob. Comput. 2021, 2021, 4212548. [Google Scholar]
- Liu, J.; Du, X.; Cui, J.; Pan, M.; Wei, D. Task-oriented intelligent networking architecture for the space–air–ground–aqua integrated network. IEEE Internet Things J. 2020, 7, 5345–5358. [Google Scholar] [CrossRef]
- Xie, R.; Tang, Q.; Wang, Q.; Liu, X.; Yu, F.R.; Huang, T. Satellite-terrestrial integrated edge computing networks: Architecture, challenges, and open issues. IEEE Netw. 2020, 34, 224–231. [Google Scholar] [CrossRef]
- Denby, B.; Lucia, B. Orbital edge computing: Machine inference in space. IEEE Comput. Archit. Lett. 2019, 18, 59–62. [Google Scholar] [CrossRef]
- Cui, G.; Long, Y.; Xu, L.; Wang, W. Joint offloading and resource allocation for satellite assisted vehicle-to-vehicle communication. IEEE Syst. J. 2020, 15, 3958–3969. [Google Scholar] [CrossRef]
- Song, Z.; Hao, Y.; Liu, Y.; Sun, X. Energy-efficient multiaccess edge computing for terrestrial-satellite internet of things. IEEE Internet Things J. 2021, 8, 14202–14218. [Google Scholar] [CrossRef]
- Ren, Z.-Y.; Hou, X.-W.; Guo, K.; Zhang, H.-L.; Chen, C. Distributed satellite cloud-fog network and strategy of latency and power consumption. J. ZheJiang Univ. (Eng. Sci.) 2018, 52, 1474–1481. [Google Scholar]
- Wang, C.; Ren, Z.; Cheng, W.; Zheng, S.; Zhang, H. Time-expanded graph-based dispersed computing policy for leo space satellite computing. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; IEEE: New York, NY, USA, 2021; pp. 1–6. [Google Scholar]
- Jia, M.; Zhang, L.; Wu, J.; Guo, Q.; Gu, X. Joint computing and communication resource allocation for edge computing towards Huge LEO networks. China Commun. 2022, 19, 73–84. [Google Scholar] [CrossRef]
- Dong, F.; Huang, T.; Zhang, Y.; Sun, C.; Li, C. A Computation Offloading Strategy in LEO Constellation Edge Cloud Network. Electronics 2022, 11, 2024. [Google Scholar] [CrossRef]
- Chengcheng, L.; Yasheng, Z.; Chenhua, S. Computation Offloading for Satellite-based Edge Computing in LEO Satellite Network. Radio Commun. Technol. 2022, 48, 401–407. [Google Scholar]
- Zou, J.; Hao, T.; Yu, C.; Jin, H. A3c-do: A regional resource scheduling framework based on deep reinforcement learning in edge scenario. IEEE Trans. Comput. 2020, 70, 228–239. [Google Scholar] [CrossRef]
- Qi, F.; Zhuo, L.; Xin, C. Deep reinforcement learning based task scheduling in edge computing networks. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China (ICCC), Chongqing, China, 9–11 August 2020; IEEE: New York, NY, USA, 2020; pp. 835–840. [Google Scholar]
- Mao, Y.; Zhang, J.; Letaief, K.B. Dynamic computation offloading for mobile-edge computing with energy harvesting devices. IEEE J. Sel. Areas Commun. 2016, 34, 3590–3605. [Google Scholar] [CrossRef] [Green Version]
- Neely, M.J. Stochastic network optimization with application to communication and queueing systems. Synth. Lect. Commun. Netw. 2010, 3, 1–211. [Google Scholar]
- Dai, X.; Xiao, Z.; Jiang, H.; Alazab, M.; Lui, J.C.; Min, G.; Dustdar, S.; Liu, J. Task offloading for cloud-assisted fog computing with dynamic service caching in enterprise management systems. IEEE Trans. Ind. Inform. 2022, 19, 662–672. [Google Scholar] [CrossRef]
- Jiang, H.; Dai, X.; Xiao, Z.; Iyengar, A.K. Joint task offloading and resource allocation for energy-constrained mobile edge computing. IEEE Trans. Mob. Comput. 2022. [Google Scholar] [CrossRef]
- Li, N.; Hu, Y.; Chen, Y.; Zeng, B. Lyapunov optimized resource management for multiuser mobile video streaming. IEEE Trans. Circuits Syst. Video Technol. 2018, 29, 1795–1805. [Google Scholar] [CrossRef]
- Huang, C.; Wang, H.; Zeng, L.; Li, T. Resource scheduling and energy consumption optimization based on Lyapunov optimization in fog computing. Sensors 2022, 22, 3527. [Google Scholar] [CrossRef]
- Kuhn, H.W. The Hungarian method for the assignment problem. Nav. Res. Logist. Q. 1955, 2, 83–97. [Google Scholar] [CrossRef] [Green Version]
- Iridium. Available online: https://www.iridium.com/blog/iridium-next-review/ (accessed on 4 March 2023).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [10, 12] | |
| 6 × 11 | |
| The bound of random | [10, 15] |
| Satellites transmission power | 400 |
| Satellites computational power | [100, 200] |
| Length of one time slot | 10 |
| Simulation time slots | 360 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Gong, W.; Zhou, F. A Lyapunov-Optimized Dynamic Task Offloading Strategy for Satellite Edge Computing. Appl. Sci. 2023, 13, 4281. https://doi.org/10.3390/app13074281
Hu Y, Gong W, Zhou F. A Lyapunov-Optimized Dynamic Task Offloading Strategy for Satellite Edge Computing. Applied Sciences. 2023; 13(7):4281. https://doi.org/10.3390/app13074281
Chicago/Turabian StyleHu, Yifei, Wenbin Gong, and Fangming Zhou. 2023. "A Lyapunov-Optimized Dynamic Task Offloading Strategy for Satellite Edge Computing" Applied Sciences 13, no. 7: 4281. https://doi.org/10.3390/app13074281