1. Introduction
Networked robots have various applications, such as monitoring large environments, rescue missions, and target chasing [
1,
2,
3,
4]. Multiple coordinated robots are also used to perform many specific tasks, such as rendezvous [
5,
6,
7], spacecraft docking [
8], environmental monitoring [
9,
10,
11], underwater target chasing [
12], and formation control [
13,
14,
15].
This study addresses multi-robot rendezvous controls in cluttered underwater environments with many unknown obstacles. Unmanned Underwater Vehicles (UUVs) can be divided into two categories based on whether their bodies are streamlined. The UUV’s shape is determined by the requirements of the application. For example, a streamlined shape reduces water resistance and is preferable if the UUV is required to move at high speeds. However, if underwater detection or operation tasks are the primary roles of a UUV, a non-streamlined shape is often preferred.
Because of the good water pressure resistance of spherical objects, spherical UUVs can perform rotational motions with a 0 degree turn radius. In the literature, various spherical UUVs have been developed [
16,
17,
18,
19,
20]. References [
16,
18,
19,
20,
21] addressed a spherical UUV with hybrid propulsion devices including vectored water jet and propeller thrusters. The three Degree-of-Freedom (DoF) motions, including surging, heaving, and yawing, were performed in a swimming pool. References [
16,
19,
21] further demonstrated that by adopting vectored water jets, a spherical UUV can be made to maneuver freely in any direction. Considering a spherical UUV, [
22] used fuzzy proportional–integral–derivative (PID) controllers to independently control the robot’s movement in all directions. Since spherical UUVs are highly maneuverable, our study considers a spherical UUV [
16,
17,
18,
19,
20] as our platform.
We address practical application scenarios where multi-robot rendezvous controls are used. Recently, several studies [
23,
24,
25] handled distributed formation control of multiple robots in environments with obstacles. For instance, a group of robots can be used for tracking a target while measuring the target’s signal [
26]. During the robots’ maneuvering in formation controls, robots need to preserve the network connectivity. In order to make all robots gather close to each other, distributed rendezvous controls can be applied occasionally. In other words, distributed rendezvous algorithms can be used as a multi-robot control module to allow a team of robots to maintain network connectivity while they maneuver. For example, we can run rendezvous controls occasionally, so that all robots get closer to a root robot which leads the formation. Moreover, all robots need to get closer to the root robot, in the case where they move through a narrow tunnel.
Furthermore, rendezvous algorithms can be utilized in multi-robot collection or charging scenarios [
27]. Suppose that there is a charging station close to a robot, called the root. All the robots can be charged from the charging station, once they gather close to the root.
The difficulty of the rendezvous problem decreases when a robot is equipped with Global Positioning Systems (GPS). However, GPS is unavailable in underwater environments. In difficult scenarios without GPS, robots cannot move toward a designated rendezvous point directly. Thus, we introduce a distributed rendezvous approach that does not require global localization.
A rendezvous algorithm is considered distributed, when it depends on the local interaction between neighboring robots. A distributed rendezvous algorithm is practical, since a robot cannot communicate with another robot that is too far away. Furthermore, obstacles in cluttered 3D environments can easily block the communication links between robots. In this study, we propose distributed rendezvous algorithms for UUVs in 3D unknown environments with many obstacles. Here, unknown obstacles can lead to communication link failure or invisible robots. The proposed rendezvous control is adaptive to communication link failure or invisible robots.
Considering 3D underwater environments, this study addresses the problem of enabling a network of UUVs to rendezvous at a designated root robot. Any robot in the network can be set as the root robot. Thus, the rendezvous system in this study is referred to as the any-robot rendezvous system.
The rendezvous controls in this study consider a UUV that can only measure the signal intensity emitted from its neighbor UUV. Thus, the proposed rendezvous control is suitable for a cheap UUV, which only has sensors for measuring the signal strength.
Reference [
28] addressed a received signal strength (RSS) sensor model for underwater sound propagation. We consider multiple UUVs such that each UUV has multiple signal intensity sensors surrounding it. Each intensity sensor can measure the RSS of sound generated from a neighbor UUV [
28].
Multiple intensity sensors on a UUV can only measure the amplitude (intensity) of signals emitted from its neighboring UUVs. To enable a distributed rendezvous based on amplitude-only measurements, we utilize a method of making a UUV approach the source of the signal (neighbor UUV) by measuring the intensity of signal at multiple intensity sensors.
We demonstrate that our distributed rendezvous algorithms are provably complete in achieving multi-robot rendezvous in cluttered 3D environments. The proposed 3D rendezvous controls assure the convergence to a designated UUV, while maintaining the connectivity of the time-varying and position-dependent communication network.
Moreover, the proposed rendezvous controls can handle the case where some UUVs are broken. While controlling the networked system, any UUV, including the root UUV, can become faulty owing to various reasons, such as hardware malfunction. This study, thus, discusses a fault detection method, which detects faulty UUVs based on local sensing measurements. Once a UUV failure is sensed, then we update the network structure, so that healthy UUVs without faults can be controlled effectively.
This study handles scenarios where multiple UUVs are deployed in cluttered 3D environments (e.g., [
29]). In obstacle-rich environments, the communication (interaction) link between UUVs may be easily blocked owing to obstacles. Furthermore, invisible UUVs may occur, since line-of-sight can be blocked by unknown obstacles. In such scenarios, it is important to assure that the communication link is preserved, while every UUV maneuvers. The proposed distributed rendezvous control is unique in overcoming communication link failure or invisible UUVs. Note that communication link failure or invisible UUVs may happen due to unknown obstacles in cluttered 3D environments.
We address a distributed rendezvous control for spherical UUVs with bounded speed, such that each UUV can only measure the strength of signals emitted from neighboring UUVs. The contributions of our study are summarized as follows.
As far as we know, this study is novel in developing 3D distributed rendezvous controls, considering a UUV that can only measure the strength of signals emitted from neighboring UUVs.
The proposed 3D rendezvous controls are provably complete, since we prove the rendezvous to the root UUV, while maintaining the connectivity of the time-varying and position-dependent communication network.
To the best of our knowledge, our study is unique in addressing a fault detection method that detects faulty UUVs based on local sensing measurements. In addition, the proposed rendezvous controls are adaptive to communication link failure or invisible UUVs.
The study is organized as follows.
Section 2 provides the literature review of this study.
Section 3 provides the background information of this study.
Section 4 discusses the 3D distributed rendezvous controls introduced in this study.
Section 5 provides the simulation results of this study.
Section 6 provides the conclusions of this study.
2. Literature Review
Considering 2D environments, there are many studies on distributed controllers to make all robots rendezvous, considering the case where a robot measures the relative position of its nearby robot [
7,
30,
31,
32]. In [
33], circumcenter-based consensus algorithms were introduced to achieve distributed rendezvous of multiple robots. However, how to handle faulty robots was not discussed in [
33]. Considering 2D environments, [
34] introduced rendezvous controllers that are tolerant to faulty robots. However, this method needs a controllable sensing range, which may not be feasible in practice. The authors of [
35] considered the optimal consensus problem of asynchronous sampling single-integrator and double-integrator multi-robot systems utilizing distributed model predictive control algorithms.
Event-driven rendezvous strategies [
36,
37,
38] for multi-agent systems were motivated by the use of embedded microprocessors with limited resources that will gather information and actuate the individual agent controller updates. Considering event-triggered rendezvous controls, [
38] proved that if the communication graph is connected, consensus is achieved exponentially. The authors of [
37] showed that with appropriate control gains in event-triggering conditions, subsystems employing discrete-time signals from neighbors achieve the state consensus. The authors of [
36] studied the rendezvous problem of multi-robot systems by parallel event-triggered connectivity-preserving controls. The event-triggered control laws in [
36] can assure the system convergence, and can maintain the connectivity of the time-varying and position-dependent communication network. However, [
36,
37,
38] considered 2D environments without obstacles. In cluttered underwater environments, obstacles can block the communication link between robots, resulting in the loss of a robot.
Our study handles practical scenarios where multiple underwater robots are deployed in cluttered environments (e.g., [
29]). In obstacle-rich environments, the communication (interaction) link between robots may be blocked owing to obstacles. In such scenarios, it is important to assure that the communication link is preserved while every robot maneuvers. As far as we know, the proposed distributed rendezvous control is unique in overcoming communication link failure or invisible robots.
As far as we know, other studies on distributed rendezvous controls [
7,
30,
31,
32,
36,
37,
38] assumed that a robot can measure the relative position of its neighbor robot using local sensors, such as laser. However, no physical sensors were clearly described for this local interaction. In other words, other rendezvous controls in [
7,
30,
31,
32,
36,
37,
38] were designed, while the specific sensors that were used for the controls were not considered. However, considering specific sensors is crucial, since robots move based on local sensing measurements.
Considering 2D environments, [
39] addressed rendezvous algorithms using received signal strength indicator (RSSI) data from the radio. Reference [
40] addressed a simple rendezvous algorithm using RSSI data from the radio. Reference [
40] used a small, low-cost, modular robotics platform in 2D environments. Reference [
40] explored the potential for using RSSI in platforms equipped with radios in order to rendezvous at a desired location or agent. The authors of [
39] addressed multi-robot rendezvous with range-only measurements. However, references [
39,
40] considered simple 2D environments with no obstacles. In addition, [
39,
40] did not show that their rendezvous algorithm is provably complete in achieving multi-robot rendezvous. Moreover, [
39,
40] did not consider how to handle the case where a UUV is broken.
In [
41], the authors applied radars with a variable sensing range in order to make all robots rendezvous in 3D environments. However, obstacle environments were not considered in [
41]. Unknown obstacles can block the communication link between robots in practice. Moreover, in underwater environments, electromagnetic signals easily dissipate, and thus, radars are not suitable in underwater environments.
In 3D underwater environments, a UUV needs to be equipped with expensive 3D sonar sensors with sensing arrays, in order to measure the relative position of its neighbor UUV. However, the intensity sampling sensors used in our study are not sufficient for measuring the relative position of a neighbor UUV. In other words, intensity sensors used in our study cannot be used for measuring the relative position of a neighbor UUV.
To the best of our knowledge, our study is novel in developing provably complete 3D distributed rendezvous controls, considering a UUV which can only measure the strength of signals emitted from neighboring UUVs. Moreover, our study is unique in introducing a 3D rendezvous control, which is robust to intensity sensor failures or UUV failures.
4. Robust Distributed Rendezvous Control
4.1. Distributed Breadth First Search (BFS) Algorithm to Generate a Spanning Tree T
In our study,
is set as the root of a tree graph
T. In order to generate a tree
T rooted at
, we use a distributed Breadth First Search (BFS) algorithm in [
61]. We acknowledge that [
61] addressed a distributed BFS algorithm, so that a node in the network can guide a moving object across the network to the goal. Algorithm 2 in [
61] can be applied to make a tree
T rooted at
. The tree
T is rooted at
, and
T has a unique path from the UUV
to
.
Algorithm 1 shows a distributed BFS algorithm to generate a tree
T containing all UUVs. The goal sensor in Algorithm 2 of [
61] represents the root
in Algorithm 1. Initially, every UUV
u contains
, which indicates the hop distance to the root. The root
sets
initially. For every UUV except for the root, we initially set
, where
. Here,
implies that one has not set the hop distance for
.
| Algorithm 1 Distributed BFS algorithm to generate a spanning tree T |
- 1:
Every UUV u contains , which indicates the hop distance to the root; - 2:
The root sets initially; - 3:
We initially set , where ; - 4:
Initially, sends its hop distance information to its neighbor UUVs; - 5:
repeat - 6:
u← every UUV; - 7:
if the UUV u satisfies , and it receives a hop distance message from its neighbor UUV, e.g., n then - 8:
The UUV u updates its hop distance information using ( 9); - 9:
The UUV u broadcasts to its neighbors; - 10:
end if - 11:
until for all u;
|
Initially,
sends its hop distance information
to its neighbor UUVs. Suppose a UUV
u satisfies
, and it receives a hop distance message from its neighbor UUV, e.g.,
n. Then,
u updates its hop distance information using the following equation:
Using Equation (
9),
can be updated to
. In this case, the parent of
u is updated to
n. Thereafter,
u broadcasts
to its neighbors. In Equation (
9),
returns a smaller value between
a and
b.
References [
61,
62] proved that the number of message broadcasted by every UUV is 1 in this distributed BFS algorithm. This implies that the distributed BFS has the computational complexity
.
Utilization of Signal Intensity Sensors to Detect Neighbors
Note that in Algorithm 1, every UUV utilizes its signal intensity sensors to detect its neighbors. Recall that is a neighbor to if and . Based on the signal intensity measurements, finds its neighbors, e.g., . For instance, if detects two UUVs and , then we set . By making a UUV stand still while measuring the signals from neighbor UUVs, can determine .
The obstacle environment is not known in advance. In order to build T in unknown obstacle environments, every UUV utilizes its signal intensity sensors to detect its neighbors. As every UUV turns on its signal intensity sensors while standing still, can detect its neighbors.
For the detection of neighbors, we assume that a UUV, e.g., , can identify another UUV, e.g., , by analyzing the signal emitted from . Each UUV emits signal using Binary Phase Shift Keying (BPSK) with a distinct frequency band. Suppose that every UUV shares the frequency band information of all UUVs. Suppose that a UUV, e.g., , receives the signal from another UUV, e.g., . Then, runs a bandpass filter to analyze the frequency of the signal. By running the bandpass filter, can detect that the signal was generated from . In this way, a UUV can distinguish the signal of a UUV from that of another UUV. Moreover, the bandpass filter in a UUV can be used to filter out signal interference, such as a signal generated from unknown transmitters.
We acknowledge that there exists a serious delay of underwater communication. This implies that cannot detect its neighbors instantly. A UUV needs to emit signals and receive signals from its neighbors. However, this delay does not cause problems, since no UUV moves while we generate a spanning tree T using Algorithm 1.
4.2. Distributed Rendezvous Algorithms
While all UUVs stop, Algorithm 1 in
Section 4.1 runs to build a spanning tree
T in a distributed manner. Based on the tree
T, Algorithm 2 runs to achieve rendezvous at
. In other words, Algorithm 2 makes every UUV encounter at the root
.
We explain Algorithm 2. Initially (
), all leaf UUVs begin visiting every UUV along the path to
. Each leaf UUV finds a path to
using
T. Since
T is a tree graph, only one path exists from a node to the root in
T. Once the path is found, each UUV stores the UUV indexes along the path to
. How to make a UUV visit the UUVs along the path to the root
is discussed in
Section 4.4.
In order to maintain network connectivity, the maneuver of a UUV must not disconnect the network. Therefore, each UUV does not begin moving until it encounters all its descendants in T. This implies that each UUV needs to store the UUV indexes associated with its all descendants.
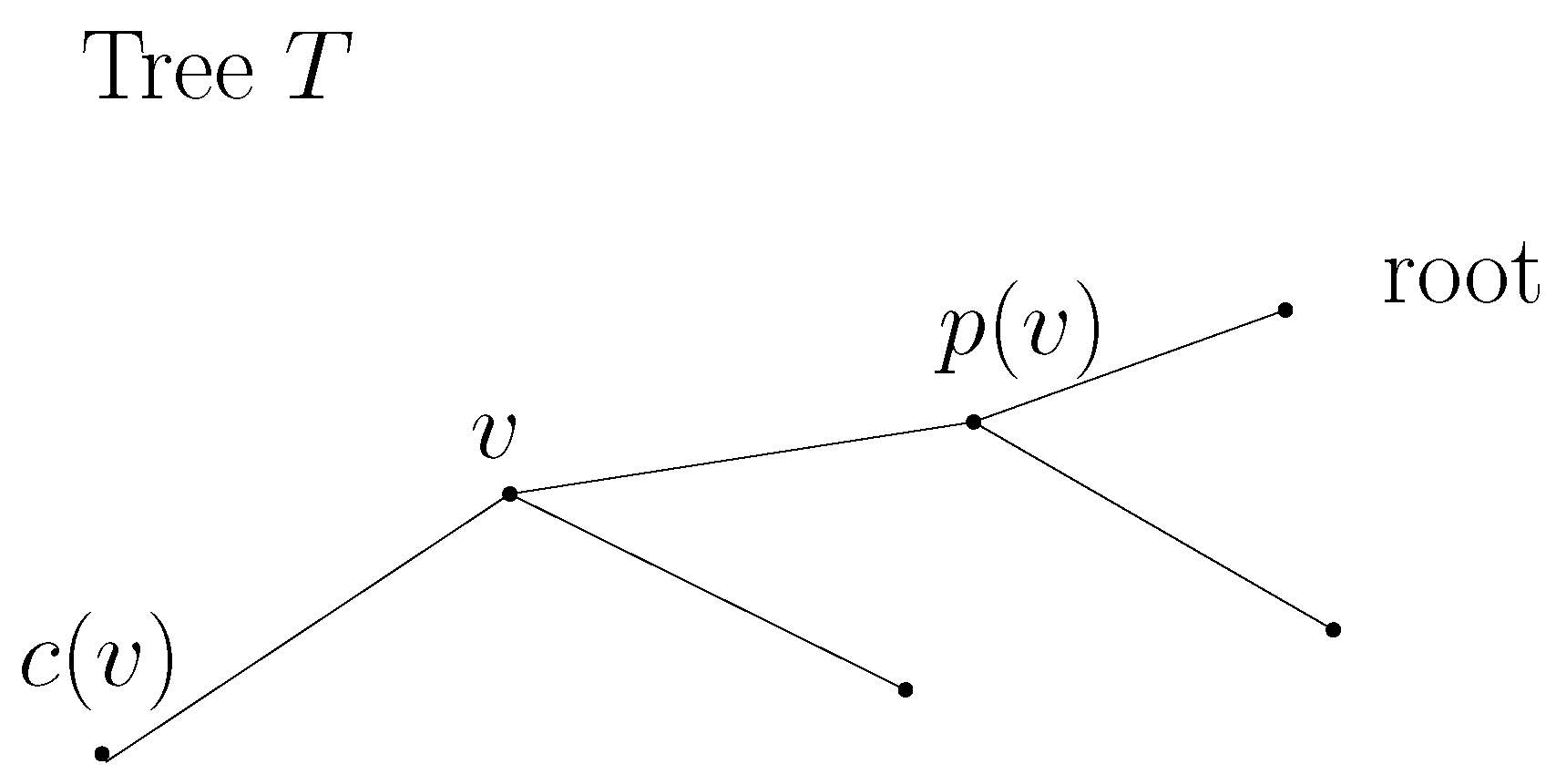
Let us consider a UUV
with at least one child. From
to
in
T, only one path exists. As soon as
encounters all its descendants,
starts visiting every UUV along the path to
under Algorithm 2. As time elapses,
encounters all its descendants and
starts visiting every UUV along the path to
. This procedure continues until all UUVs encounter at
.
| Algorithm 2 Distributed rendezvous strategy |
- 1:
While all UUVs stop, Algorithm 1 in Section 4.1 runs to build the tree T rooted at ; - 2:
repeat - 3:
u← every UUV; - 4:
if u is a leaf in T then - 5:
The UUV u finds a path to using T; - 6:
The UUV u starts visiting every UUV along the path; u is not a leaf in T - 7:
else if u is not a leaf in T then - 8:
if u encounters all its descendants then - 9:
The UUV u finds a path to using T; - 10:
The UUV u starts visiting every UUV along the path; - 11:
end if - 12:
end if - 13:
if a UUV is broken or interaction link between two neighboring UUVs in T is broken by moving obstacles then - 14:
All UUVs stop moving, and re-build a tree T by re-running Algorithm 1 in Section 4.1; - 15:
end if - 16:
if an invisible UUV blocked by unknown obstacles appears suddenly then - 17:
All UUVs stop moving, and re-build a tree T by re-running Algorithm 1 in Section 4.1; - 18:
end if - 19:
until every UUV encounters ;
|
Whether a UUV encounters another UUV can be detected utilizing signal power measurements. Recall that if both and exceed , then we assume that encountered .
As long as we consider static obstacles, the connectivity of the path to the root is not broken by obstacles. In other words, as long as obstacles have not moved after the initial tree generation, the maneuver of a UUV along the path to the root is not blocked by obstacles.
Theorem 1 proves that Algorithm 2 is distributed. Furthermore, Theorem 1 proves that network connectivity is preserved while a UUV maneuvers until reaching the root. This implies that under Algorithm 2, every UUV reaches the root, while preserving network connectivity.
Theorem 1. Algorithm 2 is distributed. Under Algorithm 2, every UUV reaches the root, while preserving network connectivity to the root.
Proof. Suppose that u has been visiting UUVs along the path to in Algorithm 2. Let indicate the path for convenience. Suppose that consists of a set of UUVs in this order. Here, is the root . As u moves along this path, it reaches the root in the end.
We first prove that , where , starts moving only after u encounters . A UUV, other than a leaf starts moving only after all its descendants in T encounter it. Any UUV on is an ancestor of u. Hence, does not start moving before it encounters u.
In the case where u has just encountered , u can sense utilizing its local sensors. Since u moves based on local sensing measurements, Algorithm 2 is distributed.
As u moves along , it reaches the root in the end. We next prove that u remains connected to the root, during its maneuver along to the root. Consider the case where u has just encountered and starts moving towards . In this case, u is connected to . All UUVs in stand still. Hence, is connected to . Since u is connected to , u is also connected to . It is proved that any UUV u remains connected to the root during its maneuver along to the root. □
4.3. Handling of Dynamic Scenarios, including Faulty UUVs
One may have a situation where a UUV is broken or the interaction link between two neighboring UUVs in
T is broken by moving obstacles. Moreover, we may have a situation where an invisible UUV blocked by unknown obstacles appears suddenly. In these cases, every UUV stops moving, and we re-build a tree
T utilizing Algorithm 1 in
Section 4.1, so that network connectivity among UUVs can be re-established. Then, Algorithm 2 re-runs to achieve rendezvous at
. In this way, we can handle dynamic scenarios which may happen due to unknown obstacles.
As we re-build a tree
T utilizing Algorithm 1 in
Section 4.1, we may have a case where a tree
T cannot be generated. This implies that a UUV may not be connected to the root, even after running Algorithm 1 in
Section 4.1. For handling this case, we need to increase the number of neighbors for each UUV.
For handling the case where a UUV may not be connected to the root, we increase
in Equation (
5) for each UUV. As
increases, the number of neighbors can increase, since a UUV
is a neighbor to
if
and
. By increasing the signal emission strength,
can detect a UUV that is located far from
. This emission power increase was also used in [
41], for improving the network connectivity in multi-agent systems. We acknowledge that by increasing the signal emission strength,
consumes more power.
4.3.1. Discard Faulty UUVs
Note that a UUV can become faulty owing to various reasons, such as hardware malfunction. We next address how to handle faulty UUVs. Let a healthy UUV denote a UUV having no faults.
Every UUV is encountered by its child under Algorithm 2. Thus, every faulty UUV, including a faulty root, can be detected by its child. Once a healthy UUV meets with a faulty UUV, the healthy UUV sends signal to the faulty UUV. A healthy UUV responds with an acknowledge signal whenever it receives a signal. If a UUV does not respond to the received signal, then the healthy UUV can find that a fault has occurred in the responding UUV.
Algorithm 2 is further designed to cope with a faulty UUV (including a faulty root). We discuss how to handle faulty UUVs from now on.
We first introduce a method of discarding (dropping) faulty UUVs once they are sensed. Once a broken UUV, e.g.,
, is sensed, then a tree
T is updated by applying Algorithm 1 in
Section 4.1 without
. Thereafter, Algorithm 2 runs utilizing the updated
T. The updated
T does not contain
. This implies that we discarded (dropped)
.
If there are too many faulty UUVs, then it may be impossible to build a tree T without them. If we cannot build a tree without faulty UUVs, then we cannot make every healthy UUV encounter at the root UUV.
4.3.2. Using Static Faulty UUVs as Waypoints
There may be a case where a static faulty UUV has a communication ability, and thus, can emit a signal from it. We discuss a method which does not discard a static faulty UUV with communication ability. In this method, every UUV utilizes static faulty UUVs as “waypoints” along the path to the root UUV. Note that we do not discard faulty UUVs under this method.
Note that a healthy UUV, which does not have faults, can still measure the signal from a static faulty UUV. Assume that a healthy UUV, e.g., u, has a static faulty UUV, e.g., f, as its ancestor. In this case, the healthy UUV can still visit UUVs along the path, which contains f, to the root. This implies that u utilizes f as “waypoints” along the path to the root UUV.
Note that if f is healthy, then f waits until it encounters all its descendants. However, since f is faulty and static, f cannot move even after all its descendants encounter f. In this case, , the parent of f, cannot begin moving, since f is faulty and cannot move towards .
In order to resolve this problem, removes f from its descendants list. In this way, starts moving after all its descendants, other than f, encounter .
4.4. Visiting UUVs along the Path to the Root, Based on Signal Strength Measurements
At the beginning of Algorithm 2, Algorithm 1 in
Section 4.1 runs to build a spanning tree
T in a distributed manner. Algorithm 1 has the computational complexity
[
61,
62]. Once
T is generated, the only control applied to each UUV is visiting UUVs along the path, e.g.,
, to the root in
T. This control is a high-level control of every UUV.
We introduce a local control to make one UUV visit UUVs along utilizing signal strength measurements. Consider the case where consists of a set of UUVs in this order. Here, is the root. In the inertial reference frame, let indicate the 3D position of for convenience.
Suppose that encountered and that the next UUV to encounter is . Since encountered , can detect the signal emitted from utilizing its intensity sensors. Each intensity sensor on measures the strength of signals emitted from .
Signal field intensity is maximized at the signal source. See Equation (
5) for RSSI. The gradient direction of a field defines the direction which maximizes the increase in the field. We let a UUV
move in the gradient direction of the field. Since the gradient is the direction representing the maximum increase of the field, this maneuver makes the UUV move towards the signal source.
The gradient direction is measured in the body−fixed frame of . In the body−fixed frame of , let present the gradient of P at the center of . Moving in the direction of makes move towards the signal source .
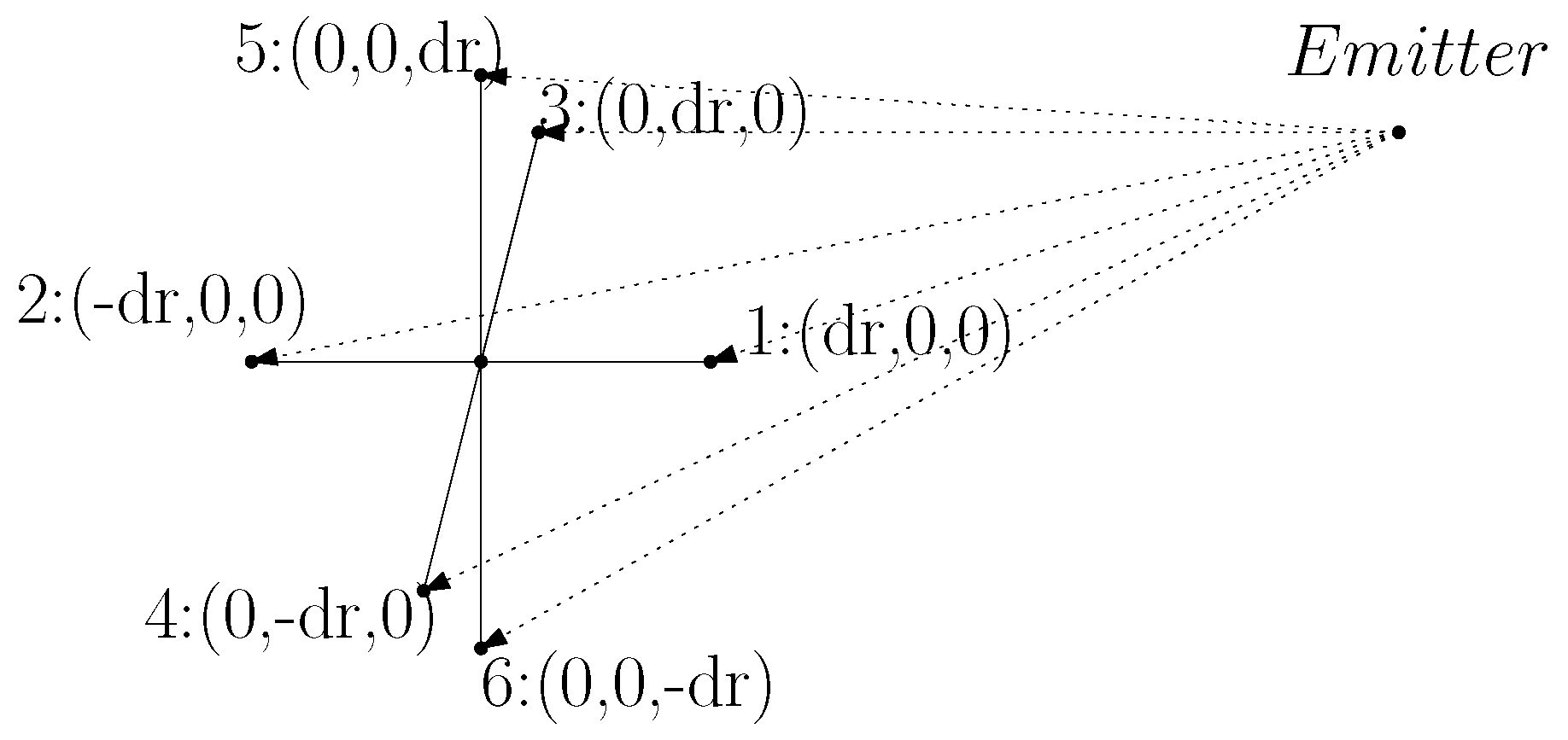
We next discuss how to derive
utilizing signal intensity measurements. The local coordinates of every intensity sensor are presented in
Figure 3.
Assume that
is sufficiently small for all
. Through Taylor expansion up to the first-order derivative, one obtains the following:
which leads to:
At each sampling step
k, one obtains the following:
Here,
. Furthermore, we utilize the following:
Utilizing (
11)–(
13), we derive the following:
Thereafter,
is derived using the pseudo-inverse as follows:
where
defines the gradient of
P, measured in the the body−fixed frame of
. In order to make
head towards the signal source, the heading of
is set as the gradient direction. Since the gradient is the direction representing the maximum increase of the field, this maneuver makes the UUV move towards the source.
In Equation (
8), the UUV’s heading vector
is defined in the inertial reference frame. Since
is defined in the body−fixed frame of
, one changes
into a gradient vector in the inertial reference frame.
Notice that
is a gradient vector in the inertial reference frame. In order to set the heading of
as the gradient direction,
sets its new heading using the following equation:
Note that a UUV does not have to measure its attitude
for moving towards the signal source. The UUV can move in the gradient direction
in its body−fixed frame. For instance, suppose that the gradient field
is estimated as [1,0,0] in the UUV’s body−fixed frame. Using (
16), the UUV’s control command is generated for moving in the direction of [1,0,0] in its body−fixed frame.
We next discuss how
can detect the moment when it encounters
. If
in Equation (
6) exceeds
in Equation (
7), then we assume that
encountered
. Thus,
begins moving towards
if it exists.
For collision avoidance, we make
slow down as it gets closer to
. The UUV’s linear speed
is set as follows. If
in Equation (
6) is larger than
, then
begins moving towards
. Otherwise, we set the following:
where
is a tuning parameter. In MATLAB simulations, we use
. In Equation (
17),
returns a smaller value between
a and
b.
When a UUV is sufficiently close to , it begins moving towards the next UUV . In this way, avoids collision with UUVs on its path to the root. In the case where encounters the root, stops moving.
This study considers a spherical UUV. The authors of [
16,
19,
20,
21] showed that by adopting vectored water jets, a spherical UUV can maneuver freely in any direction. The control of a spherical UUV appeared in [
22], which used fuzzy PID controllers to independently control the robot’s movement in all directions.
While
maneuvers, a moving obstacle may abruptly appear in practice. In this case, the UUV
can avoid collision using reactive collision avoidance controls. We acknowledge that any reactive control method can be applied for this evasion [
63,
64,
65].
5. Simulations
The MATLAB R2014a simulator is utilized to demonstrate the effectiveness of the proposed rendezvous controllers. The system environment includes Window 10, Intel Core
i5-7600K CPU@3.80 GHz. The controllers are implemented in a discrete-time system, and the sampling time interval to discretize the UUV’s velocity control (
8) is 0.3 s.
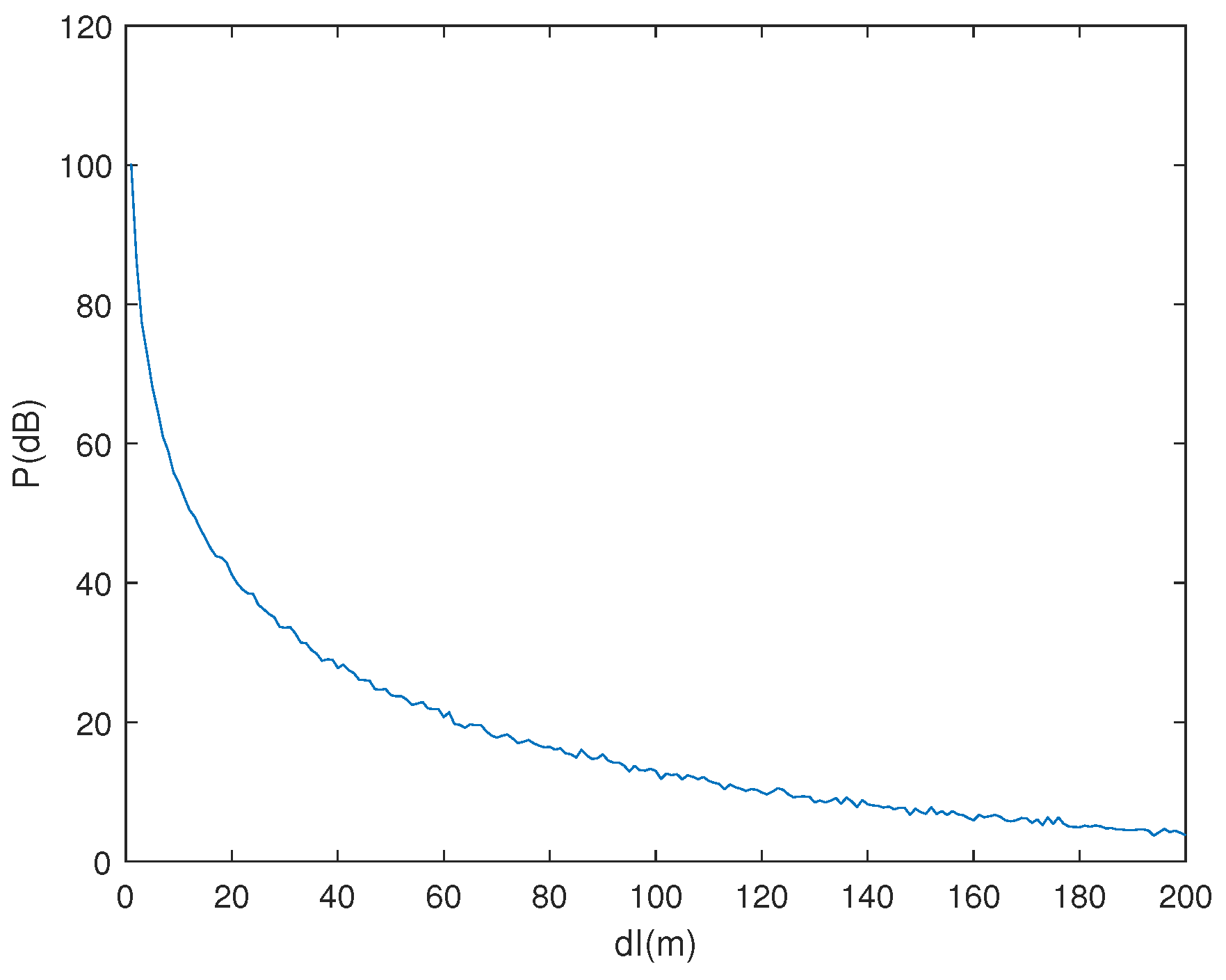
We simulate a 3D underwater environment (200 × 200 × 200) with many obstacles. For realistic simulations of the RSSI for an underwater emitter, we use the model parameters used in [
28]. In Equation (
5),
= 100 dB,
,
, and
are used, according to [
28].
Recall that we said that a UUV
is a neighbor to UUV
if
and
. We set
dB. Using
Figure 4, the associated maximum sensing range
is 10 m. In this way, the relative distance between two neighbor UUVs is less than 10 m.
The maximum speed of every UUV is set as
(m/s). Recall that if
and
exceeds
, then we assume that
encountered
. We set
(in dB), which is identical to
. Using (
7),
(in dB) is associated with
m.
In this study, a UUV uses six intensity sensors.
Figure 3 plots the local coordinates of every intensity sensors positioned on a UUV.
is the relative distance between the first sensor and any other sensor.
is a tuning parameter in our control.
If
is too small, then intensity measurements of six sensors on a UUV are not distinct from each other. In this case, the gradient direction at the UUV position cannot be estimated accurately. If
is too large, then we cannot apply the Taylor expansion in Equation (
10). In the simulations, six intensity sensors are installed such that
m.
To prove the robustness of the proposed methods, we run 100 Monte Carlo (MC) simulations, such that the initial network satisfies this initial connectivity assumption. As far as we know, this initial connectivity assumption is required for any distributed rendezvous controls in the literature [
34,
41,
51,
52].
At the beginning of each MC simulation, 50 UUVs are randomly deployed until the following two conditions are met:
Once these two conditions are satisfied, then 50 UUVs begin to move under Algorithm 2. Otherwise, we keep deploying 50 UUVs until the above two conditions are met.
Once these two conditions are satisfied, then 50 UUVs begin to maneuver under Algorithm 2. This maneuver indicates the beginning of a single MC simulation. In all MC simulations, rendezvous is achieved for every UUV.
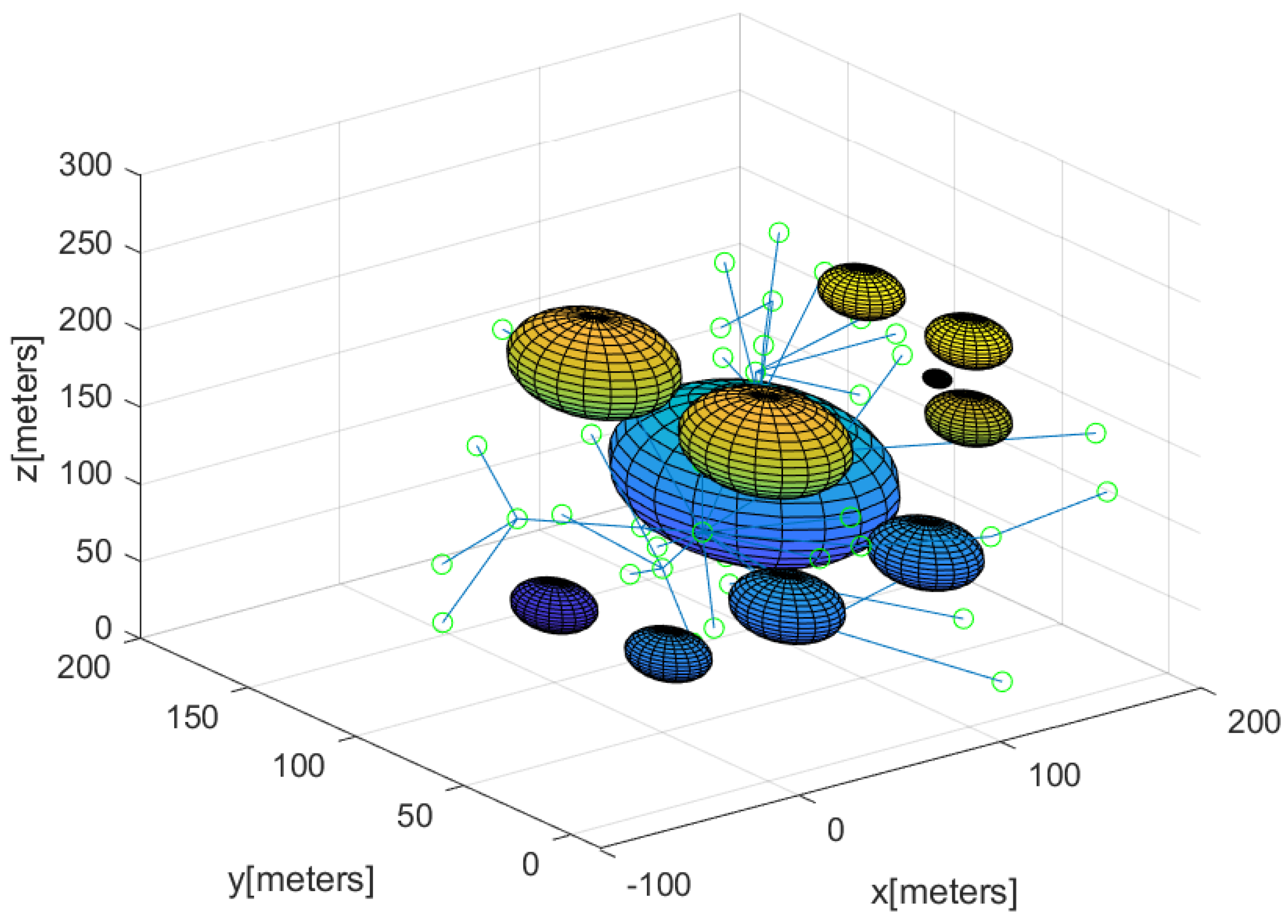
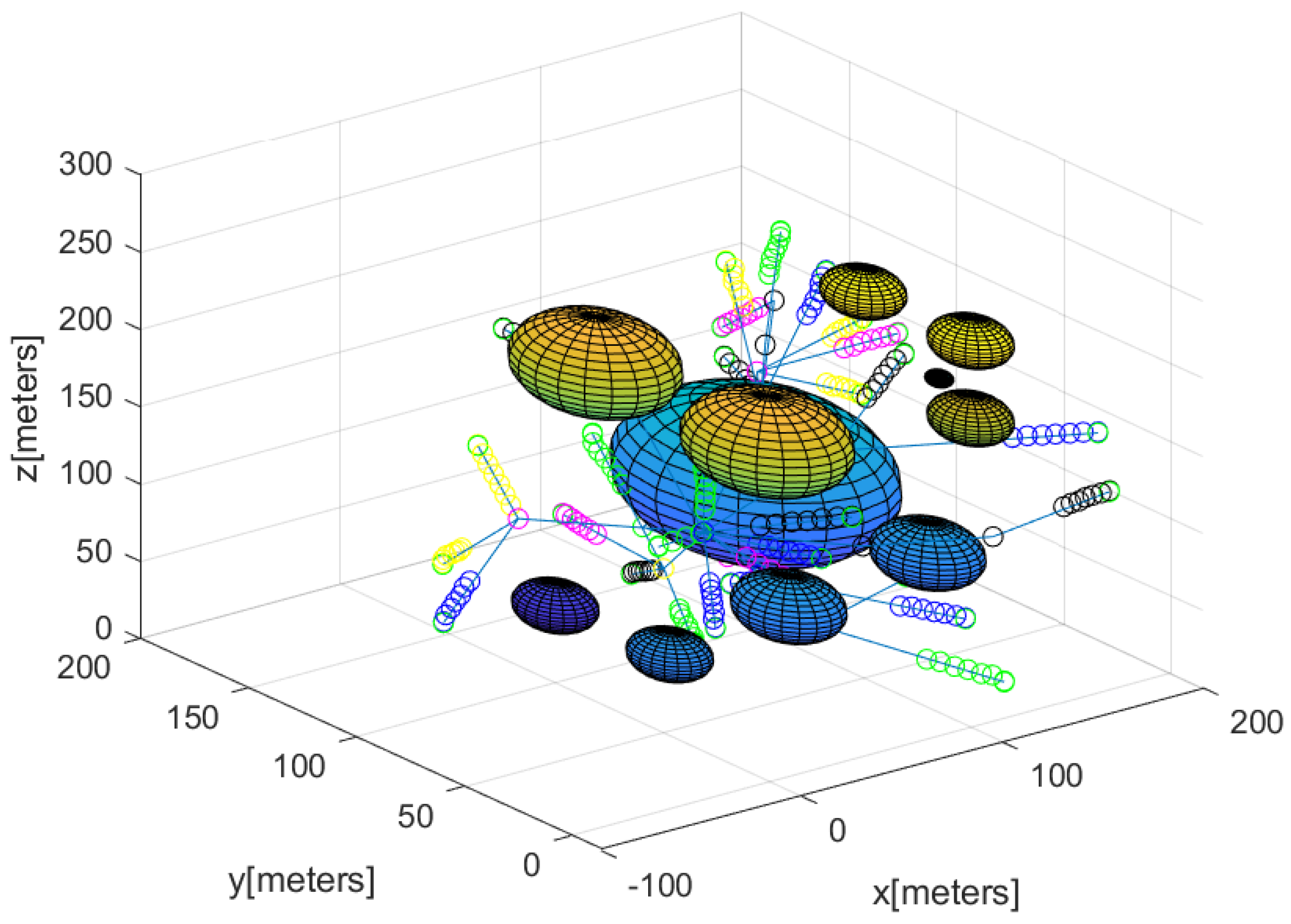
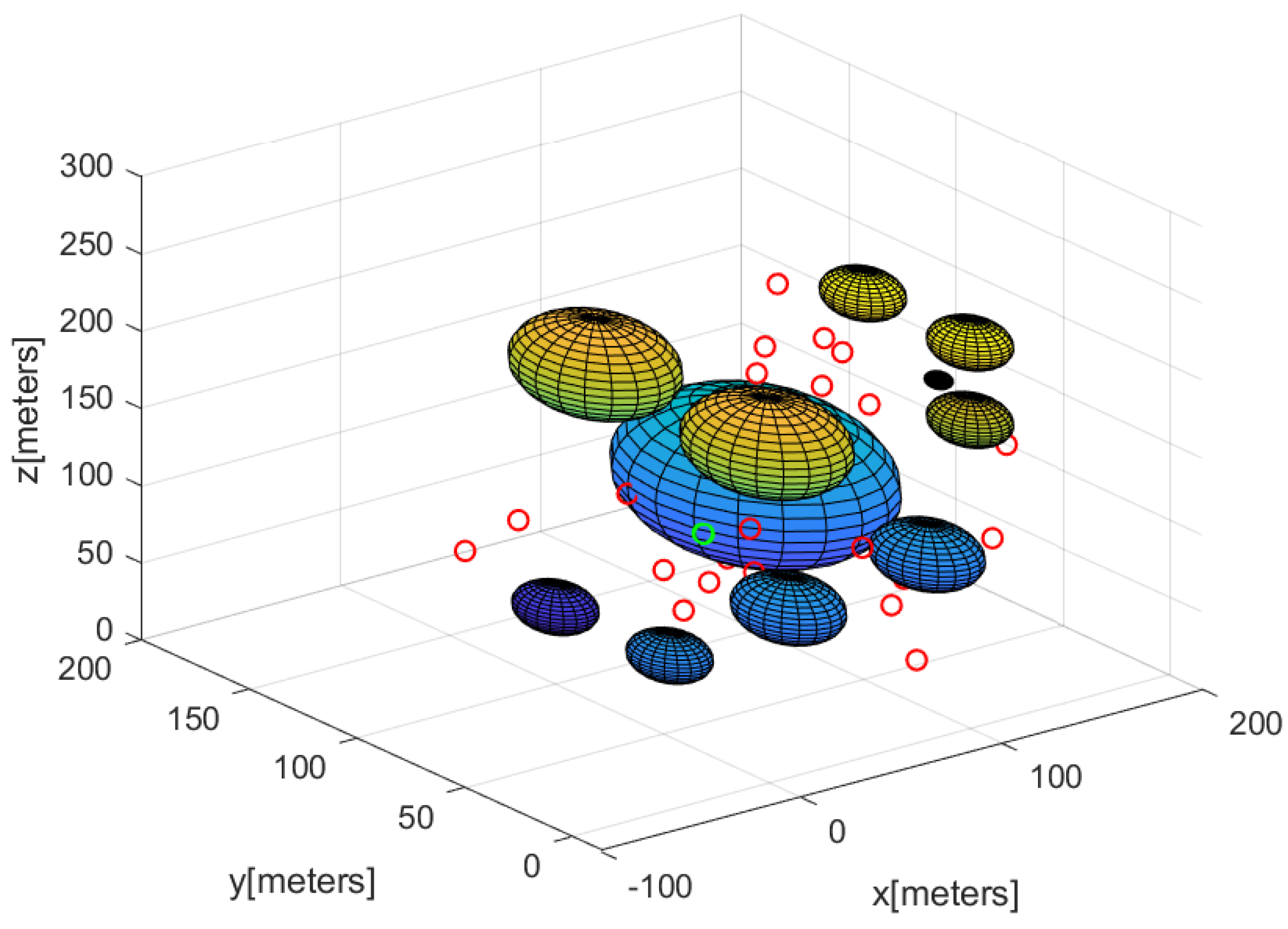
Considering one MC simulation,
Figure 5 shows the initial position of every UUV. The initial position of every UUV is plotted with a green circle. This figure shows the obstacle boundaries with spheres. We also plot the tree graph
T (blue line segments) generated initially.
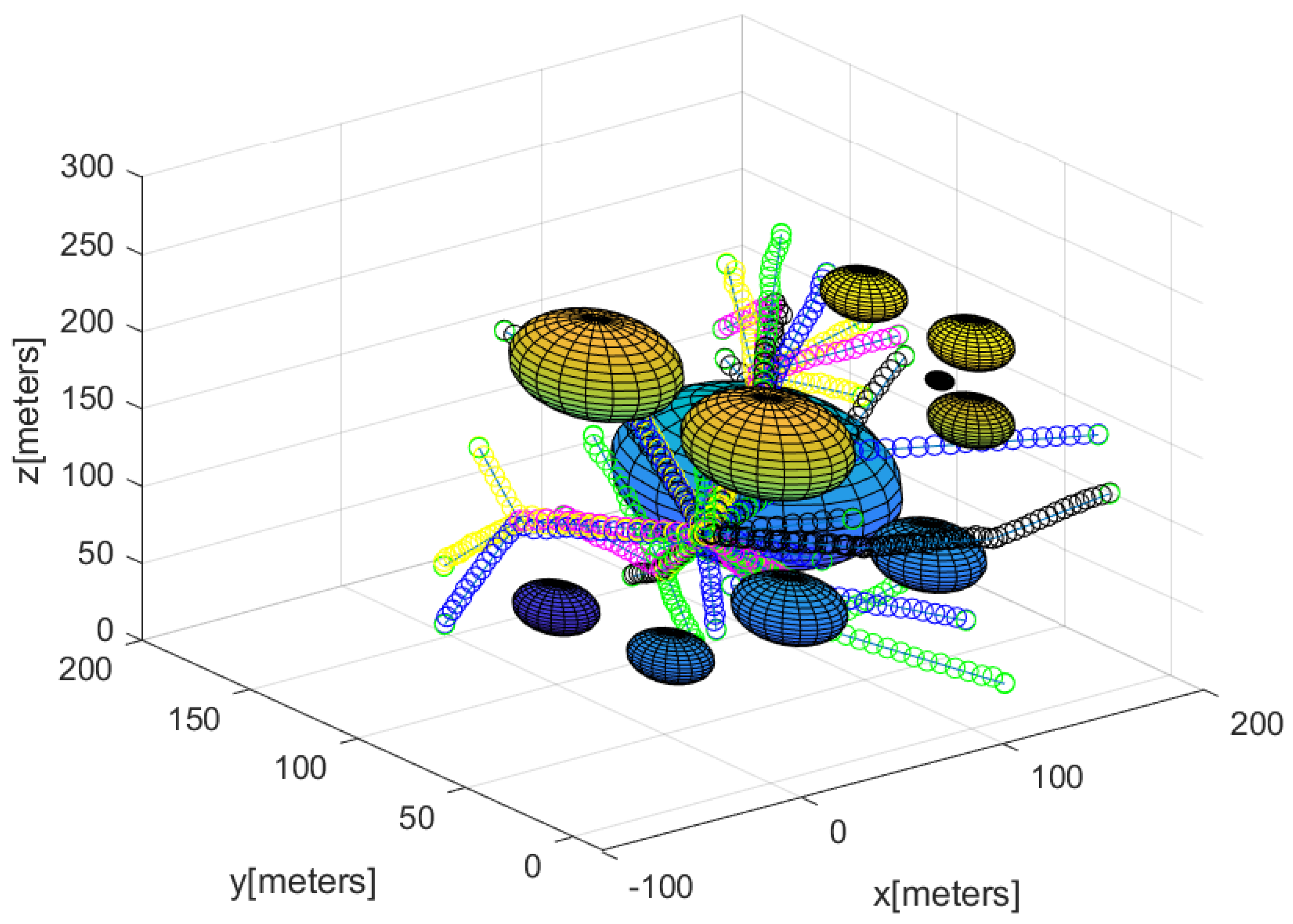
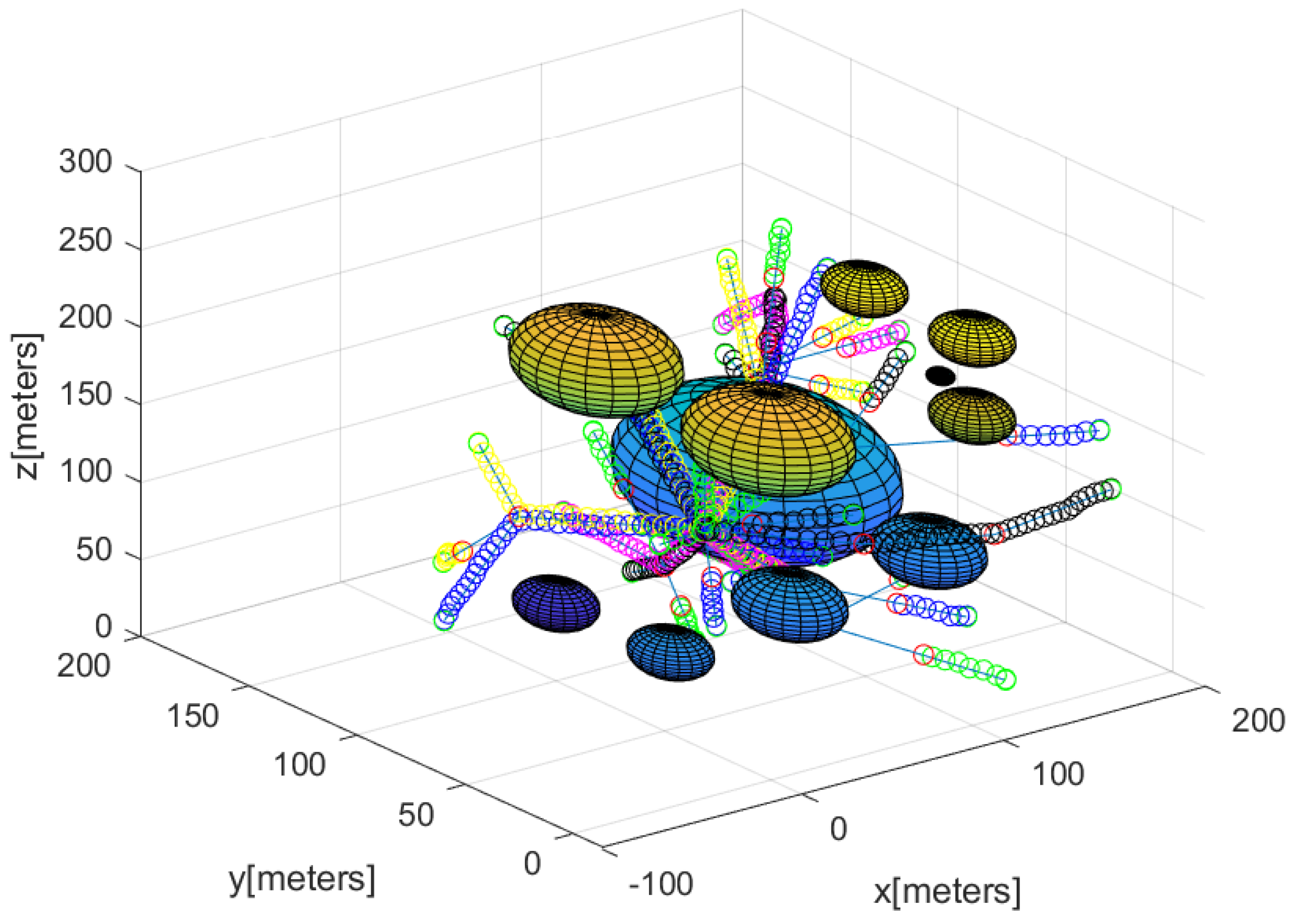
Figure 6 shows each UUV’s maneuver until
s have passed. We also plot the tree graph
T (blue line segments) generated at time 0. Every UUV’s maneuver is illustrated as circles with a distinct color. After 148 s have passed, all UUVs encounter at the root UUV while avoiding collision with obstacles.
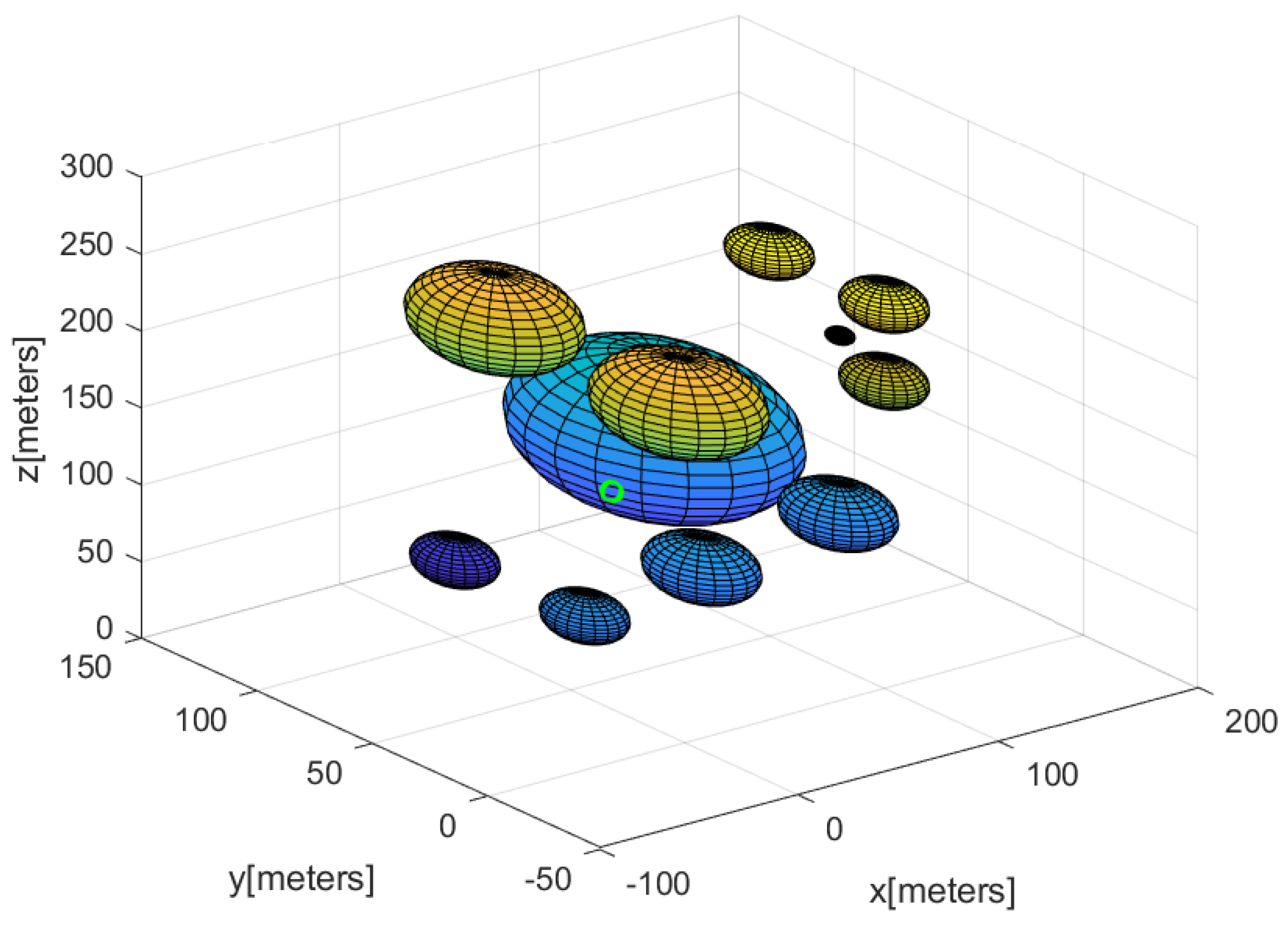
Figure 7 shows each UUV’s maneuver once the rendezvous is completed.
Figure 8 shows the final position (green circle) of every UUV.
5.1. Using the Discard Approach in Section 4.3.1
We utilize the initial position of every UUV as in
Figure 5. In this scenario, 25 UUVs among 50 UUVs are broken after 20 s have elapsed. Recall that
Figure 6 shows each UUV’s maneuver until
s pass.
To handle broken UUVs, we utilize the discard approach in
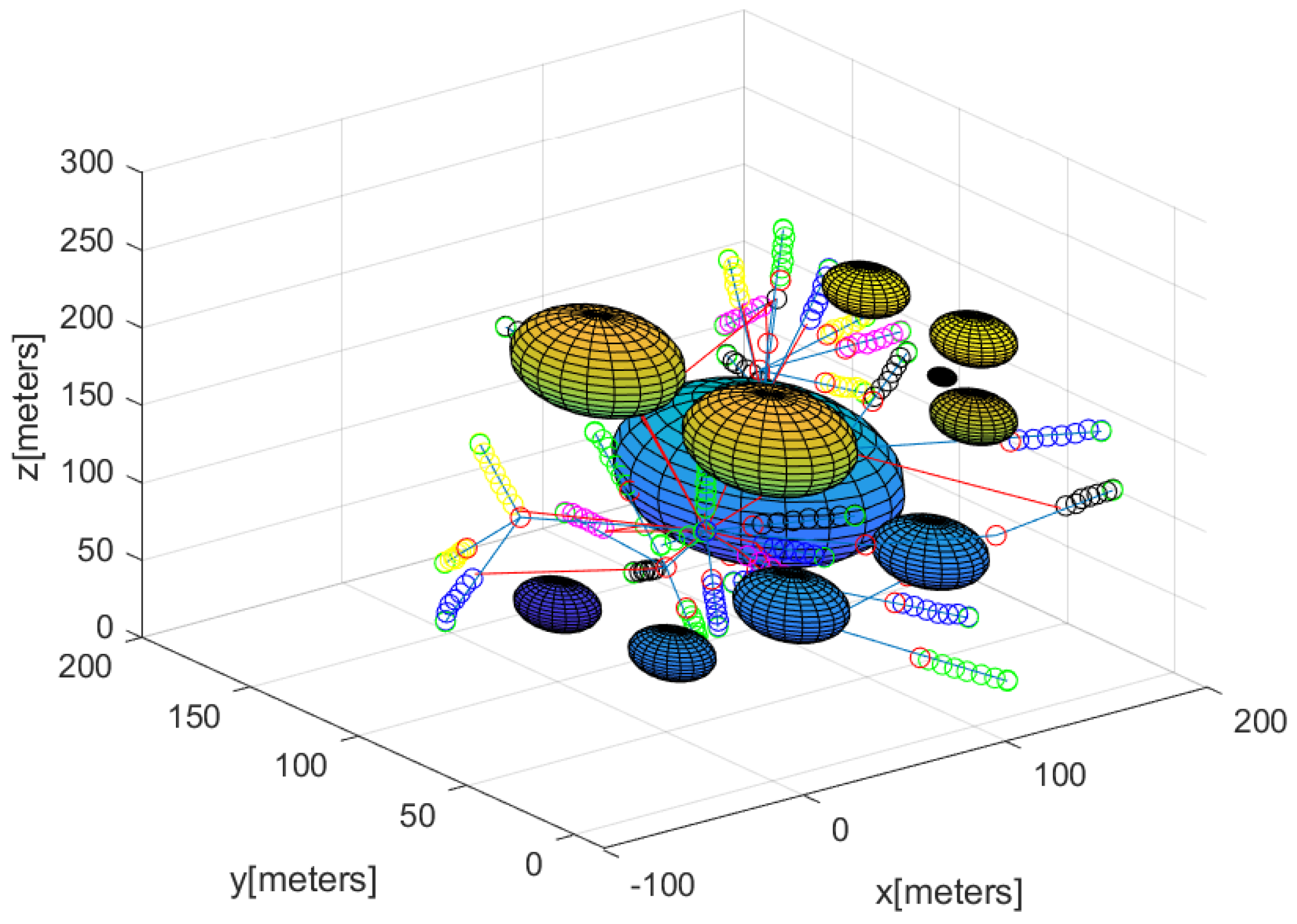
Section 4.3.1. Considering one MC simulation,
Figure 9 plots every UUV’s maneuver until
s have passed. In this figure, every UUV’s maneuver is illustrated as circles with a distinct color. At
s, we build a tree
T (blue line segments in
Figure 9) containing all UUVs. At
s, 25 broken UUVs are illustrated with red circles in
Figure 9. At
s, we re-build a connected tree
T without broken UUVs. The re-built tree
T is marked with red line segments in
Figure 9.
Considering UUVs’ faults,
Figure 10 and
Figure 11 show the movement of every UUV under our 3D distributed rendezvous controllers. In the figures, every UUV’s maneuver is illustrated as circles with a distinct color. In total, 25 broken UUVs are illustrated with red circles. To handle broken UUVs, one utilizes the discard approach in
Section 4.3.1. In total, 25 healthy UUVs spend 180 s to encounter at the root, while avoiding collision with obstacles.
Figure 11 shows every UUV’s final position (green circles) after the rendezvous is completed (discard approach is utilized). A total of 25 broken UUVs are illustrated with red circles.
5.2. Using the Waypoint Approach in Section 4.3.2
We utilize the initial position of every UUV as in
Figure 5. In this scenario, 25 UUVs among 50 UUVs are broken after 20 s have elapsed. Recall that
Figure 6 shows each UUV’s maneuver until
s pass.
Considering UUVs’ faults,
Figure 12 and
Figure 13 show the movement of every UUV under our 3D distributed rendezvous controllers. In the figures, every UUV’s maneuver is illustrated as circles with a distinct color. To handle broken UUVs, we utilize the waypoint approach in
Section 4.3.2. At
s, we build a tree
T (blue line segments in
Figure 12) containing all UUVs. A total of 25 broken UUVs are illustrated with red circles. In
Figure 13, all healthy UUVs (green circles) rendezvous at the root. We can see that healthy UUVs use broken UUVs as waypoints for reaching the root. A total of 25 healthy UUVs spend 148 s to encounter at the root UUV, while avoiding collision with obstacles.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








